RU2249229C2 - Радиолокационная система управления по радиолучу - Google Patents
Радиолокационная система управления по радиолучу Download PDFInfo
- Publication number
- RU2249229C2 RU2249229C2 RU2003113747/09A RU2003113747A RU2249229C2 RU 2249229 C2 RU2249229 C2 RU 2249229C2 RU 2003113747/09 A RU2003113747/09 A RU 2003113747/09A RU 2003113747 A RU2003113747 A RU 2003113747A RU 2249229 C2 RU2249229 C2 RU 2249229C2
- Authority
- RU
- Russia
- Prior art keywords
- output
- input
- data processor
- control unit
- antenna
- Prior art date
Links
Images

Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
Изобретение относится к радиолокационным системам, предназначенным для использования в системах наведения оружия, устанавливаемых на вертолетах и самолетах, а также на наземных самоходных транспортных средствах, кораблях и катерах. Техническим результатом является получение высокой точности наведения радиолуча на цель в широкой угловой зоне, требуемой для применения оружия на всех видах носителей оружия. Радиолокационная система управления по радиолучу состоит из передатчика, циркулятора, приемника, синхронизатора, гетеродина-синтезатора частот, генератора синусоидального напряжения, блока управления приводами, электромеханического привода азимута, электромеханического привода угла места, кодирующего устройства и блока индикатора, при этом в нее введены антенный модуль, состоящий из антенны широкого луча, антенны узкого луча, состоящей из облучателя, формирующего зеркала и отражающего зеркала, а также введены коммутатор, блок электронного управления, процессор сигналов, процессор данных, аналого-цифровой преобразователь (АЦП), датчик угла азимута и датчик угла места. 3 ил.
Description
Изобретение относится к радиолокационным системам, предназначенным для использования в качестве систем наведения оружием, устанавливаемых на вертолетах и самолетах, а также на наземных самоходных транспортных средствах, кораблях и катерах.
Известны системы управления снарядами по радиолучу, в которых применяется радиолокационная система, обеспечивающая сопровождение целей. Такой системой может быть радиолокатор для наведения по лучу, приведенный в литературе: А.С.Локк, “Управление снарядами”. Государственное издательство технико-теоретической литературы. Москва, 1957, с.618-626.
В этом радиолокаторе в режиме сопровождения цели для наведения снаряда производится коническое сканирование луча, образующего линию равносигнального направления. Приемная бортовая аппаратура управляемого снаряда, принимая хвостовой антенной радиолокационную информацию сканирующего луча, выделяет из нее сигналы отклонения снаряда от равносигнального направления, соответствующие азимуту и углу места. Эти сигналы с помощью системы управления снарядом заставляют его двигаться по линии равносигнального направления.
При этом на стартовом участке полета снаряда после пуска должно быть обеспечено его выведение на траекторию вывода снаряда, совпадающую с равносигнальным направлением. Однако ошибки прицеливания снаряда на стартовом участке приводят к необходимости расширения луча диаграммы направленности (ДН) антенны системы.
В связи с этим в радиолокаторах управления по радиолучу применяют комбинацию широкого и узкого лучей, равносигнальное направление которых совмещается.
При применении такой системы на стартовом участке снаряд выходит на равносигнальное направление ДН широкого луча и продолжает движение в равносигнальном направлении ДН узкого луча. В таком радиолокаторе сопровождение цели по углам производится следящими измерителями, используя РЛ информацию конического сканирования на стартовом участке широкого луча, а затем узкого луча.
Технический результат заключается в обеспечении высокой точности наведения радиолуча на цель в широкой угловой зоне, требуемой для применения оружия на всех видах носителей оружия.
В качестве прототипа радиолокационной системы управления по радиолучу рассматривается “Радиолиния управления по радиолучу”, приведенная в литературе “Основы радиоуправления” под редакцией Вентцель В.А. и Типугина В.И., Москва. “Советское Радио” 1973 г., с.280-286.
На фиг.1 приведена функциональная схема устройства формирования радиолинии управления по лучу, где:
1. Антенна.
2. Редуктор.
3. Электродвигатель.
4. Источник питания.
5. Генератор синусоидального напряжения.
6. Генератор периодических импульсов.
7. Кодирующее устройство, состоящее из переключателя кодирующих устройств, кодирующего устройства первого тактового импульсно-временного сигнала (ИВС), кодирующего устройства второго тактового ИВС, ключа, элемента задержки.
8. Модулятор.
9. Генератор узкого радиолуча.
10. Генератор широкого радиолуча.
11. Следящий привод.
На схеме пунктиром обозначены механические связи.
Приведенный канал предназначен для передачи на снаряд СВЧ сигнала, промодулированного диаграммой направленности антенны, и частотой сканирования, и опорных импульсно-временных сигналов.
Антенна (1) устройства формирования радиолуча имеет два вибратора, которые питаются от генераторов высокой частоты, работающих на разных несущих частотах. Это обеспечивает при одном и том же размере отражающего зеркала образование широкого и узкого радиолучей. Положение луча в пространстве обеспечивается с помощью следящего привода (11), на который поступают сигналы управления по азимуту Uθy и углу места UΨy из вычислительного прибора.
Несимметрично расположенные вибраторы (излучатели) антенны вращаются от электродвигателя (3) через редуктор (2) с частотой “Ω”, обеспечивая формирование вращающихся широкого и узкого лучей. От редуктора (2) механический привод идет также к генератору синусоидального напряжения (5). Этот генератор является синхронизатором по отношению ко всей остальной схеме. Начальный сдвиг фазы между опорным синусоидальным напряжением и вращением диаграммы направленности антенны подбирается установкой сцепления в редукторе. Напряжение с генератора (5) синхронизирует работу переключателя в кодирующем устройстве (7), а также генератора периодических импульсов (6). Для передачи на снаряд используется импульсная модуляция СВЧ-сигнала. Сигналы генератора периодических импульсов (6), пройдя через кодирующее устройство (7), поступают на модулятор (8). Импульсы с выхода модулятора (8) поступают на генераторы узкого (9) и широкого (10) радиолучей для их запуска.
С выхода генераторов (9 и 10) высокочастотные сигналы поступают в антенну (1) и излучаются в пространство.
Для управления снарядом формируются также опорные импульсно-временные сигналы (ИВС), синхронизированные по времени с периодом модулирующей частоты “Ω” генератора синусоидального напряжения (5).
Сигналы (ИВС) формируются в кодирующем устройстве (7) из сигналов генератора периодических импульсов (6) при управлении кодирующего устройства (7) от генератора синусоидального напряжения (5). Сформированные временные сигналы (ИВС) с выхода кодирующего устройства (7) поступают на модулятор (8), затем на СВЧ-генераторы лучей (9 и 10) и через антенну излучаются в пространство.
Более подробное описание формирования кодированных опорных сигналов приведено в схеме прототипа.
Как следует из схемы прототипа, управление антенной проводится с помощью следящих электромеханических приводов. При этом управление следящими приводами осуществляется от радиолокационной системы, сопровождающей цель.
Приведенный радиопередающий канал с устройством формирования радиолуча может использоваться для управления снарядом при выполнении задачи поражения как воздушных, так и наземных целей.
Для решения этой задачи радиолокационная система управления снаряда по радиолучу производит автоматическое сопровождение цели по углам и дальности и наводит антенну радиопередающего канала на цель. В случае одиночной цели требуемая точность попадания, потребная для поражения, зависит от вида и характеристик цели, а также от типа и мощности боевой части снаряда. Некоторые из целей, такие как танки или боевые корабли, имеют броню, и для их разрушения требуется прямое или близкое к прямому попадание.
Если в качестве наземной цели принять танк с размерами: длина L=7,9 м; ширина А=3,65 м, высота Н=2,438 м (танк М1А1 “Абраме” США), тогда требуемая точность наведения равносигнального направления диаграммы направленности радиолуча (без учета ошибок наведения самого снаряда) на лобовую часть площади радиусом 1,3 м с вероятностью Р=0,5 лежит в пределах σ≈1,2 м в горизонтальном и вертикальном направлениях (см. Вентцель Е.С., Овчаров Л.А. Теория вероятности и ее инженерное приложение, Москва, “Наука”, 1988, с.241).
Для обеспечения живучести носителя РЛС, например вертолета, поражение такой цели должно производиться на дальности, превышающей дальность действия объектового ПВО противника. По известным нам данным дальность действия таких зенитных ракетных комплексов по маловысотным целям типа вертолет лежит в пределах 5-8 км.
Если принять величину дальности поражения цели типа “танк” Д=8 км, то требуемая угловая точность наведения радиолуча в азимутальной и угломестной плоскостях будет составлять σфа=0,5’; σφум=0,5’.
Анализ работы электромеханической следящей системы, подобной прототипу, показывает, что электромеханический привод не может обеспечить вышеприведенную требуемую высокую точность определения направления на цель из-за главного недостатка в построении механической системы - из-за наличия люфта в редукторе при передаче движения от оси двигателя к исполнительному устройству. По опыту ряда разработок подобных электромеханических приводов с применением редукторов минимально достижимая ошибка сопровождения только за счет люфта в редукторе при требуемых температурных условиях составляет не менее 2-3 мин.
Ошибка за счет люфта является определяющей, так как остальные ошибки слежения можно оптимизировать в направления их уменьшения.
Задачей изобретения является повышение точности наведения радиолуча на цель в широкой угловой зоне, требуемой для применения оружия по различным целям.
Поставленная задача достигается тем, что в предлагаемой радиолокационной системе управления по радиолучу сканирующий луч антенны используется как для сопровождения цели, так и для наведения снаряда, а управление лучом при сопровождении цели по угловым координатам обеспечивается двумя следящими системами. При этом первая система слежения основана на электромеханическом приводе и работает в большой угловой зоне. Вторая система слежения, электронная, основана на применении в параболической антенне излучателя в виде антенной фазированной решетки (ФАР) и работает в очень узкой угловой зоне (в пределах двойной ширины диаграммы направленности).
В процессе слежения за целью с одновременным наведением радиолуча электромеханический привод отрабатывает эволюции носителя РЛС и устанавливает направление луча антенны на цель в пределах углов диаграммы направленности.
Последующая отработка рассогласования между линией визирования на цель и равносигнальным направлением диаграммы направленности с необходимой высокой точностью производится электронной системой слежения с помощью ФАР-излучателя.
В предлагаемой РЛС для наведения снаряда применяются две антенны, которые формируют широкий и узкий лучи.
Антенна широкого луча выполнена в виде фазированной антенной решетки и по своей структуре аналогична излучателю антенны узкого луча.
Через передающее устройство по радиолучам передаются на снаряд кодированные СВЧ-сигналы для формирования опорного сигнала модулирующей частоты.
В соответствии с вышеизложенным, предлагается радиолокационная система управления по радиолучу, состоящая:
из передатчика, циркулятора, приемника, синхронизатора, гетеродина-синтезатора частот, генератора синусоидального напряжения, блока управления приводами, электропривода азимута, электропривода угла места, кодирующего устройства и блока индикатора; при этом выход передатчика через циркулятор соединен со вторым входом приемника; первый выход синхронизатора по сигналам “Fп” соединен с первым входом кодирующего устройства; второй выход синхронизатора по сигналам “Fп” соединен с генератором синусоидального напряжения, первый выход которого по сигналам “Ω” соединен со вторым входом кодирующего устройства; выход кодирующего устройства по сигналам “Fп” и “ИВС” соединен с первым входом передатчика, второй вход которого по СВЧ сигналам “fo” соединен со вторым выходом гетеродина-синтезатора частот, первый выход которого по сигналам “Fn” соединен со входом синхронизатора; третий выход гетеродина-синтезатора частот по сигналам частоты гетеродина “fг” соединен с первым входом приемника; вход гетеродина-синтезатора частот по сигналам опорного генератора “fоп” соединен с третьим выходом синхронизатора; первый выход блока управления приводами соединен с электроприводом азимута; второй выход блока управления приводами соединен с электроприводом угла места, а также антенного модуля, состоящего из антенны широкого луча, антенны узкого луча, состоящей из облучателя, формирующего зеркала и отражающего зеркала, коммутатора и блока электронного управления; процессора сигналов, процессора данных, АЦП, датчика угла азимута и датчика угла места.
При этом первый выход процессора данных по сигналам управления соединен с третьим входом процессора сигналов, а второй выход процессора данных по сигналам управления соединен с вторым входом коммутатора, первый вход которого по СВЧ-сигналам соединен с вторым выходом циркулятора, третий выход процессора данных по сигналам управления лучами соединен с входом блока электронного управления, четвертый выход процессора данных по сигналу ошибки азимута соединен с первым входом блока управления приводами, пятый выход процессора данных по сигналу ошибки угла места соединен с вторым входом блока управления приводами; первый вход процессора данных по сигналу частоты “Ω” соединен с вторым выходом генератора синусоидального напряжения, второй вход процессора данных по сигналам частоты синхронизации “fd” соединен с шестым выходом гетеродина-синтезатора частот, четвертый выход гетеродина-синтезатора частот по сигналу частоты дискретизации “fд” соединен со вторым входом АЦП, вход которого по сигналам, отраженным от целей, соединен с выходом приемника, а выход АЦП по преобразованным сигналам приемника соединен с вторым входом процессора сигналов, пятый выход гетеродина-синтезатора частот по сигналам частоты синхронизации “fc” соединен с первым входом процессора сигналов, третий вход процессора данных по сигналам ошибки соединен с первым выходом процессора сигналов, четвертый вход процессора данных соединен с датчиком угла места, пятый вход процессора данных соединен с датчиком угла азимута; первый выход коммутатора по СВЧ-сигналам излучения соединен с первым входом антенны широкого луча, второй выход коммутатора по СВЧ-сигналам излучения соединен с вторым входом антенны узкого луча; первый выход блока электронного управления по управляющим сигналам лучом соединен с вторым входом антенны широкого луча, второй выход блока электронного управления по управляющим сигналам лучом соединен с первым входом антенны узкого радиолуча.
На фиг.1 приведена блок-схема системы прототипа.
На фиг.2 приведена блок-схема предложенной радиолокационной системы управления по радиолучу.
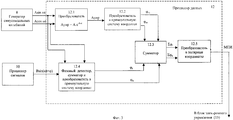
На фиг.3 приведена структурная схема электронного управления радиолучом.
Предложенная РЛС управления по радиолучу содержит:
антенный модуль - 1;
циркулятор - 2;
передатчик - 3;
синхронизатор - 4;
индикатор - 5;
приемник - 6;
кодирующее устройство - 7;
генератор синусоидального напряжения - 8;
гетеродин-синтезатор частот - 9;
процессор сигналов - 10;
аналого-цифровой преобразователь (АЦП) - 11;
процессор данных - 12;
коммутатор - 13;
антенну широкого луча - 14;
блок электронного управления - 15;
антенну узкого луча - 16;
датчик угла азимута - 17;
датчик угла места - 18;
блок управления приводами - 19;
электромеханический привод азимута - 20;
электромеханический привод угла места - 21;
формирующее зеркало - 22;
отражающее зеркало - 23;
облучатель - 24.
Антенный модуль (1) включает в себя антенну широкого луча (14), антенну узкого луча (16), состоящую из облучателя (24), формирующего зеркала и отражающего зеркала (23), коммутатор (13) и блок электронного управления лучами (15). Антенны широкого (14) и узкого (16) радиолучей установлены с совмещением их осей на единой платформе, управляемой по азимуту и углу места с помощью электромеханических приводов (20 и 21) как в режиме обзора углового пространства, так и в режиме слежения за целью при сопровождении в большой угловой зоне. Высокая точность наведения равносигнального направления радиолуча на цель обеспечивается применением в антенне узкого луча (16) облучателя, построенного по принципу фазированной антенной решетки, положение луча которой управляется с помощью фазовращателей ([1]. Справочник по радиолокации под ред. М.Сколника, т.2, Москва, “Сов. Радио”, 1977 г., с.162). Управление фазовращателями осуществляется через блок электронного управления (15). В отличие от электромеханической системы, которая работает в широкой угловой зоне, управление лучом при слежении за целью с помощью фазированной антенной решетки облучателя антенны производится в узкой угловой зоне (в пределах удвоенной ширины диаграммы антенны).
Следует отметить, что в случае применения в качестве антенны узкого луча полностью фазированной антенной решетки не обеспечивается требуемая точность наведения радиолуча в широкой угловой зоне из-за ухудшения ее характеристик на больших углах. Приведенное построение с применением ФАР в излучателе, обеспечивающем управление лучом только в узкой угловой зоне, лишь незначительно усложняет систему.
В приведенной блок-схеме РЛС в режиме сопровождения цели для формирования сигнала ошибки отклонения цели от равносигнального направления применяется электронное вращение луча при его смещении относительно фокуса антенны.
Предлагаемое построение РЛС с двухконтурной системой слежения - электромеханической и электронной - обеспечивает более высокую точность наведения радиолуча.
Радиолокационная система управления по радиолучу работает следующим образом.
Передатчик (3) через циркулятор (2) и коммутатор (13) через антенну узкого луча (16) излучает высокочастотные импульсы, которые отражаются от цели. При этом луч антенны узкого луча (16) производит коническое сканирование. Коническое сканирование производится по синусоидальному закону и обеспечивается с помощью фазовращателей (ФАР) в излучателе (24). Коническое сканирование узкого луча по синусоидальному закону обеспечивается посредством применения генератора синусоидального напряжения (8), напряжение с которого поступает в процессор данных (12). В процессоре данных (12) синусоидальный закон изменения напряжения преобразуется в закон изменения положения луча в координатах антенны. Полученные таким образом сигналы управления положением луча из процессора данных (12) по магистрали параллельного обмена МПИ поступают в блок электронного управления (15). В качестве линий связи между процессором данных и остальными блоками может быть применена магистральная линия параллельного обмена МПИ по ГОСТ 26765-51-86. Обмен между аналого-цифровым преобразователем (11) и процессором сигналов (10) осуществляется по 2×32-разрядной линии обмена.
В блоке электронного управления (15) сигналы управления преобразуются в токи управления ферритовыми фазовращателями в излучателе (24), которые изменяют фазу СВЧ-сигнала. Изменение фаз СВЧ-сигналов на выходе фазовращателей излучателя (24) обеспечивает управление положением узкого луча в пространстве по заданному закону.
На начальном этапе пуска снаряда, до ввода его в узкий луч в коммутаторе (15) (с разделением по времени между узким и широким лучом с помощью коммутатора (13)) формируются аналогичные сигналы управления ферритовыми фазовращателями, которые передаются в антенну ФАР широкого радиолуча (14).
Синусоидальное напряжение в генераторе синусоидального напряжения (8) формируется из импульсного напряжения синхронизатора (4) путем деления частоты повторения импульсов передатчика (3) до частоты синусоидального напряжения и формированием на этой частоте синусоидального напряжения.
Для управления снарядом по радиолучу с помощью передатчика (3) через антенну узкого луча (16) и широкого луча (14) излучаются опорные импульсные сигналы. Эти опорные сигналы, синхронизированные с напряжением генератора синусоидального напряжения (8), формируются в кодирующем устройстве (7), поступают в передатчик (3) и излучаются через антенны узкого (16) и широкого (14) радиолучей.
Подробное описание подобной структуры кодировки опорных сигналов приведено в литературе [1]. Основным синхронизирующим устройством РЛС является синхронизатор. Основой синхронизатора, определяющей его стабильность, является опорный кварцевый генератор. Сигнал стабильного опорного генератора fоп из синхронизатора (4) поступает в блок гетеродина-синтезатора частот (9), построенного по известным принципам, изложенным в Справочнике по радиолокации, М.Сколник, “Сов. Радио”, 1979, с.152. В блоке гетеродина-синтезатора частот формируются сигналы:
- частоты повторения импульсов передатчика (3) - Fп;
- несущей частоты излучения передатчика (3) - f0;
- частоты гетеродина приемника (6) - fг;
- частоты дискретизации АЦП (11) - fд;
- частоты запуска процессора сигналов (10) - fс;
- частоты запуска процессора данных (12) - fd.
Отраженный от цели сигнал принимается антенной узкого луча (16) и через коммутатор (13) и циркулятор (2) поступает в приемник (6).
После преобразования, усиления и синхронного фазового детектирования две квадратуры сигнала (Q и I) поступают в блок аналого-цифрового преобразования (АЦП) (11).
Из блока АЦП (11) сигналы двух квадратур (Q и I) по 2×32-разрядной линии параллельного обмена поступают в цифровой процессор сигналов (10), в котором производится их обработка: определяется модуль сигнала, производится его межпериодное суммирование, и сигнал после суммирования поступает на индикатор (5). В процессе слежения за целью при сканировании луча антенны в процессор сигналов (10) поступает амплитудно-модулированная последовательность импульсов. Процессор сигналов (10) проводит детектирование и фильтрацию этой последовательности. Результатом детектирования и фильтрации является получение сигнала рассогласования - сигнала ошибки положения цели относительно равносигнального направления диаграммы направленности антенны (16). Сигнал ошибки поступает в процессор данных (12), куда также поступает опорное напряжение из генератора синусоидального напряжения (8). В процессоре данных (12) решается алгоритм фазового детектирования и фильтрации сигнала ошибки по двум составляющим - азимуту и наклону.
Результатом фазового детектирования является получение постоянных значений сигнала, пропорциональных величинам переменных составляющих сигналов ошибки по азимуту и наклону.
В процессоре данных (12) сигналы управления сканированием луча суммируются с сигналами управления положением луча по азимуту и углу места и передаются в электронный блок управления (15).
Более подробное описание электронного канала управления в режиме сопровождения цели приведено в Приложении.
Приведенное построение РЛС с применением ФАР в излучателе, работающей только в узкой угловой зоне, решает поставленную задачу и в то же время несущественно увеличивает массу и стоимость аппаратуры по сравнению с РЛС прототипа.
Технический результат заключается в обеспечении высокой точности наведения радиолуча на цель в широкой угловой зоне, требуемой для применения оружия на всех видах носителей.
Ниже приводится сравнительная оценка точности наведения радиолуча на цель с применением следящего привода прототипа и следящих приводов предлагаемой радиолокационной системы управления по радиолучу.
Ошибка сопровождения цели складывается из следующих составляющих.
При использовании антенны с ФАР предлагаемой системы
- составляющая, обусловленная флюктуациями сигнала рассогласования, поступающего из радиолокационного тракта (σош. вх. шум);
- ошибка сопровождения, возникающая из-за наличия маневра цели (δдин. цели);
- ошибка отработки эволюции носителя (δдин. носит);
- составляющая ошибки, обусловленная флюктуационной составляющей в информации навигационных датчиков (σош. икв);
- ошибка, обусловленная дискретностью перемещения диаграммы луча, формируемого ФАР ((σдисхр).
При использовании антенны прототипа с механическим приводом к перечисленным ошибкам добавляется ошибка, обусловленная люфтом в редукторе (δлюфта), и вместо ошибки из-за дискретности перемещения луча ФАР - цена младшего разряда датчика угла (δмл. р.).
Среднеквадратическая ошибка (суммарная) сопровождения цели может быть определена по формуле


Так как величина люфта в редукторе механического привода достаточно велика (3-4)’, а младший разряд датчика больше дискрета перемещения луча ФАР, то среднеквадратическая ошибка сопровождения цели системой прототипа с помощью механического привода значительно выше, чем при использовании антенны с ФАР предлагаемой системы.
Таким образом, превышение ошибки прототипа

Реализация предлагаемой системы основана на базовых разработках устройств-блоков предприятия ОАО “Корпорация “Фазотрон-НИИР” и безусловно выполнима.
Приложение
Электронное управление лучом в режиме сопровождения цели
Как следует из описания, управление лучом производится от двух источников:
- от генератора синусоидальных колебаний (8),
- от формируемого в процессоре (10) сигнала ошибки рассогласования цели относительно равносигнального направления диаграммы направленности антенны (ДНА).
Структурная схема канала управления приведена на фиг.3.
Сигнал от генератора синусоидальных колебаний (8) проходит ряд преобразований перед подачей на ферритовые фазовращатели в облучателе антенны узкого луча, а именно в преобразователе (12.1) его преобразуют в сигнал комплексной величины
A sin ωt+A cos ωt=А е-jωt=Аупр
Далее сигнал управления Аупр преобразуют (преобразователь 12.2) в прямоугольной системе координат в два сигнала управления: по углу азимута φгу и углу места φву, которые поступают на сумматор 12.3.
При управлении положением луча от второго источника - от формируемого в приемнике и процессоре сигналов сигнала ошибки, его сигнал также проходит ряд преобразований.
Сигнал ошибки в фазовом детекторе, сумматоре и преобразователе (12.4) с помощью опорных сигналов генератора синусоидальных напряжений проходит фазовое детектирование и преобразование в прямоугольной системе координат. Фазовое детектирование выполняется путем сравнения фазы сигнала ошибки с опорными сигналами на частоте сканирования луча “ω”. Преобразованные сигналы являются мерой сигнала ошибки по азимуту “φг” и углу места “φв”.
Эти сигналы поступают на сумматор, где суммируются с преобразованными сигналами управления сканированием “φгу” и “φву”
∑φг=φгy+φг
∑φв =φ ву+φв
Далее эти сигналы в преобразователе (12.5) преобразуются в сигналы управления лучом ФАР в полярных координатах.
Claims (1)
- Радиолокационная система управления по радиолучу, состоящая из передатчика, циркулятора, приемника, синхронизатора, гетеродина-синтезатора частот, генератора синусоидального напряжения, блока управления приводами, электромеханического привода азимута, электромеханического привода угла места, кодирующего устройства и блока индикатора, при этом выход передатчика через циркулятор соединен с вторым входом приемника, первый выход синхронизатора соединен с первым входом кодирующего устройства, второй выход синхронизатора соединен с входом генератора синусоидального напряжения, первый выход которого соединен со вторым входом кодирующего устройства, выход кодирующего устройства соединен с первым входом передатчика, второй вход которого соединен с вторым выходом гетеродина-синтезатора частот, первый выход которого соединен с входом синхронизатора, третий выход гетеродина-синтезатора частот соединен с первым входом приемника, вход гетеродина-синтезатора частот соединен с третьим выходом синхронизатора, первый выход блока управления приводами соединен с электроприводом азимута, второй выход блока управления приводами соединен с электроприводом угла места, отличающаяся тем, что в нее введены антенный модуль, состоящий из антенны широкого луча, антенны узкого луча, состоящей из облучателя, формирующего зеркала и отражающего зеркала, а также введены коммутатор, блок электронного управления, процессор сигналов, процессор данных, аналого-цифровой преобразователь (АЦП), датчик угла азимута и датчик угла места, при этом четвертый выход гетеродина-синтезатора частот по сигналу частоты дискретизации соединен со вторым входом АЦП, вход которого (АЦП) по сигналам, отраженным от целей, соединен с выходом приемника, а выход АЦП по преобразованным сигналам приемника соединен со вторым входом процессора сигналов, пятый выход гетеродина-синтезатора частот по сигналам частоты синхронизации соединен с первым входом процессора сигналов для его запуска, первый выход процессора данных соединен с третьим входом процессора сигналов, а второй выход процессора данных соединен с вторым входом коммутатора, первый вход которого соединен с вторым выходом циркулятора, третий выход процессора данных соединен с входом блока электронного управления, четвертый выход процессора данных соединен с первым входом блока управления приводами, пятый выход процессора данных соединен с вторым входом блока управления приводами, первый вход процессора данных соединен с вторым выходом генератора синусоидального напряжения, второй вход процессора данных соединен с шестым выходом гетеродина-синтезатора частот, третий вход процессора данных соединен с первым выходом процессора сигналов, четвертый вход процессора данных соединен с датчиком угла места, пятый вход процессора данных соединен с датчиком угла азимута, первый выход коммутатора соединен с первым входом антенны широкого луча, второй выход коммутатора соединен с вторым входом антенны узкого луча, первый выход блока электронного управления соединен с вторым входом антенны широкого луча, второй выход блока электронного управления соединен с первым входом антенны узкого луча.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2003113747/09A RU2249229C2 (ru) | 2003-05-13 | 2003-05-13 | Радиолокационная система управления по радиолучу |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2003113747/09A RU2249229C2 (ru) | 2003-05-13 | 2003-05-13 | Радиолокационная система управления по радиолучу |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2003113747A RU2003113747A (ru) | 2004-11-10 |
| RU2249229C2 true RU2249229C2 (ru) | 2005-03-27 |
Family
ID=35560782
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2003113747/09A RU2249229C2 (ru) | 2003-05-13 | 2003-05-13 | Радиолокационная система управления по радиолучу |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2249229C2 (ru) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2523913C2 (ru) * | 2012-05-03 | 2014-07-27 | Федеральное государственное унитарное предприятие "18 Центральный научно-исследовательский институт" Министерства обороны Российской Федерации | Многоканальное устройство радиомониторинга |
| RU2532973C2 (ru) * | 2012-12-04 | 2014-11-20 | Закрытое акционерное общество "Электронно-вычислительные информационные и инструментальные системы" (ЗАО "ЭЛВИИС") | Рлс с программируемой временной диаграммой и способ ее функционирования |
-
2003
- 2003-05-13 RU RU2003113747/09A patent/RU2249229C2/ru active IP Right Revival
Non-Patent Citations (1)
| Title |
|---|
| ВЕНТЦЕЛЬ В.А. и др. Основы радиоуправления. - М.: Советское радио, 1973, с.280-286. * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2523913C2 (ru) * | 2012-05-03 | 2014-07-27 | Федеральное государственное унитарное предприятие "18 Центральный научно-исследовательский институт" Министерства обороны Российской Федерации | Многоканальное устройство радиомониторинга |
| RU2532973C2 (ru) * | 2012-12-04 | 2014-11-20 | Закрытое акционерное общество "Электронно-вычислительные информационные и инструментальные системы" (ЗАО "ЭЛВИИС") | Рлс с программируемой временной диаграммой и способ ее функционирования |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1718918B1 (en) | Rf attitude measurement system and method | |
| CN104678389B (zh) | 连续波一维相扫脱靶量矢量检测方法及其装置 | |
| AU709884B2 (en) | Weapon system employing a transponder bomb and guidance method therefor | |
| US5473331A (en) | Combined SAR monopulse and inverse monopulse weapon guidance | |
| US5755400A (en) | Inertial instrumentation correction technique | |
| EP0239156B1 (en) | System for determining the angular spin position of an object spinning about an axis | |
| US3631485A (en) | Guidance system | |
| RU2207613C1 (ru) | Бортовая аппаратура систем управления беспилотным летательным аппаратом | |
| US4501399A (en) | Hybrid monopulse/sequential lobing beamrider guidance | |
| US3844506A (en) | Missile guidance system | |
| CN104793199A (zh) | 连续波一维相扫脱靶量矢量检测方法及其装置 | |
| RU2249229C2 (ru) | Радиолокационная система управления по радиолучу | |
| US6568629B1 (en) | Method and device for magnetic guidance, especially for tracking targets | |
| Mobley et al. | Hardware-in-the-loop simulation (HWIL) facility for development, test, and evaluation of multispectral missile systems: update | |
| US2952014A (en) | Object detecting and locating system | |
| RU2719547C1 (ru) | Бортовая радиолокационная станция | |
| RU2230278C1 (ru) | Вертолетная система наведения оружия | |
| RU2188436C1 (ru) | Бортовая радиолокационная станция для самолетной системы управления вооружением | |
| Barton | Development of the AN/FPS-16 instrumentation radar | |
| RU24576U1 (ru) | Бортовая аппаратура систем управления беспилотным летательным аппаратом | |
| RU2156943C1 (ru) | Зенитная ракетно-пушечная боевая машина | |
| RU2122175C1 (ru) | Устройство для измерения координат вращающегося реактивного снаряда | |
| Clarke et al. | Review of United Kingdom Radar | |
| RU2800227C1 (ru) | Система измерения дальности воздушного объекта | |
| RU1841330C (ru) | Передатчик помех |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20100514 |
|
| NF4A | Reinstatement of patent |
Effective date: 20110427 |