RU2241627C2 - Устройство для определения длины поезда - Google Patents
Устройство для определения длины поезда Download PDFInfo
- Publication number
- RU2241627C2 RU2241627C2 RU2002119151/11A RU2002119151A RU2241627C2 RU 2241627 C2 RU2241627 C2 RU 2241627C2 RU 2002119151/11 A RU2002119151/11 A RU 2002119151/11A RU 2002119151 A RU2002119151 A RU 2002119151A RU 2241627 C2 RU2241627 C2 RU 2241627C2
- Authority
- RU
- Russia
- Prior art keywords
- train
- microcomputer
- satellite navigation
- locomotive
- antenna
- Prior art date
Links
- 230000003137 locomotive effect Effects 0.000 claims abstract description 28
- 230000011664 signaling Effects 0.000 abstract description 3
- 230000000295 complement effect Effects 0.000 abstract 2
- 230000000694 effects Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images

Landscapes
- Train Traffic Observation, Control, And Security (AREA)
Abstract
Изобретение относится к железнодорожной автоматике и телемеханике и предназначено для использования при контроле свободности участков пути и прибытия поезда на станцию в полном составе. На пункте контроля подключен к рельсу датчик положения состава. Его выход подключен к одному из информационных входов первого микрокомпьютера, соединенного через радиомодем с радиостанцией. На локомотиве имеется радиостанция, подключенная через радиомодем к одному из информационных входов второго микрокомпьютера. Отличительная особенность устройства заключается в том, что на пункте контроля и на локомотиве установлены спутниковые навигационные антенны, соединенные соответственно через первый и второй спутниковые навигационные приемники с другими информационными входами соответственно первого и второго микрокомпьютеров. Изобретение позволяет повысить точность определения длины поезда для однозначной идентификации полносоставности проследования участка пути поездом. Функциональные возможности устройства расширены за счет использования одночастотных спутниковых приемников спутниковых радионавигационных систем, интегрированных в устройства автоматической локомотивной сигнализации. 2 з.п. ф-лы, 3 ил.
Description
Изобретение относится к устройствам железнодорожной автоматики и телемеханики и может быть использовано для контроля заполнения участков пути и контроля прибытия поезда на станцию в полном составе.
Известно устройство для определения длины поезда, содержащее на пункте контроля подключенный к рельсовой цепи датчик проследования состава и аналого-цифровой преобразователь (см. авторское свидетельство СССР №1379169, кл. B 61 L 1/16, 1986).
Недостатком устройства является недостаточная точность определения длины поезда.
Из известных устройств наиболее близким является устройство для контроля местоположения локомотива, содержащее на пункте контроля подключенный к рельсу датчик положения состава, подключенный к первому информационному входу микрокомпьютера, соединенному через радиомодем с радиостанцией с антенной, а на локомотиве радиостанцию с антенной (см. патент России №2063349, кл. B 61 L 23/16, 1993).
Недостатком устройства является отсутствие возможности его использования для контроля свободности участков пути и прибытия поезда на станцию в полном составе.
Сущность заявленного изобретения состоит в определении длины поезда на пункте контроля посредством определения приращения координат между датчиком положения состава в момент его пересечения последней осью замыкающего вагона поезда и антенной приемника радионавигационных сигналов спутниковых радионавигационных систем (СРНС) ГЛОНАСС (Ураган) /GPS (Navstar) (далее по тексту спутниковая навигационная антенна) локомотива с учетом вносимой поправки в координаты спутниковой антенны локомотива, вырабатываемой опорным приемником радионавигационных сигналов СРНС ГЛОНАСС/GPS (далее по тексту спутниковый навигационный приемник) пункта контроля, для целей контроля свободности участков пути и прибытия поезда в полном составе с учетом условия, что вышедшая и вымеренная длины поезда равны между собой.
Сравнение заявленного технического решения с прототипом позволило установить его соответствие критерию новизна, так как оно не известно из уровня техники.
Предложенное устройство является промышленно применимым и существующими техническими средствами соответствует критерию изобретательский уровень, т.к. оно явным образом не следует из уровня техники.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения.
Задачей изобретения является повышение точности определения длины поезда на пункте контроля при количестве вагонов не более 56, имеющих минимальное расстояние между первой автосцепкой и последней колесной парой используемых подвижных единиц не менее 10,5 м, с точностью не хуже 5,25 м для однозначной идентификации полносоставности проследования участка пути поездом.
Технический результат достигается за счет использования спутниковых навигационных приемников СРНС ГЛОНАСС/GPS, интегрированных в устройства автоматической локомотивной сигнализации.
На фиг. 1 приведена функциональная схема построения пункта контроля устройства для определения длины поезда.
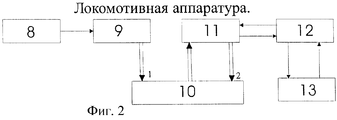
На фиг. 2 приведена функциональная схема локомотивной аппаратуры устройства для определения длины поезда.
На фиг. 3 приведена пространственно-временная диаграмма, иллюстрирующая работу устройства для определения длины поезда.
Пункт контроля содержит подключенный к рельсу датчик положения состава 1, выход которого подключен к первому информационному входу первого микрокомпьютера 2, спутниковую навигационную антенну 3, соединенную со спутниковым навигационным приемником 4, выход которого подключен ко второму информационному входу первого микрокомпьютера 2, соединенного через цифровой радиомодем 5 с радиостанцией 6 с радиоантенной 7. Электропитание пункта контроля осуществляется от внешних источников электроснабжения, напряжение от которых поступает на вторичный источник питания, который преобразует напряжение от внешних источников электроснабжения в необходимый каждому блоку пункта контроля уровень напряжения питания. Конструктивно пункт контроля выполнен в виде семи блоков. Все блоки выполнены на современной элементной базе. Программное обеспечение первого микрокомпьютера создано на языке программирования C++ под операционную систему MsDOS.
Локомотивная аппаратура содержит спутниковую навигационную антенну 8, соединенную со спутниковым навигационным приемником 9, выход которого подключен к первому информационному входу второго микрокомпьютера 10, второй информационный вход которого соединен через цифровой радиомодем 11 с радиостанцией 12 с радиоантенной 13. Электропитание локомотивной аппаратуры осуществляется от бортовой сети локомотива, напряжение от которой поступает на вторичный источник питания, который преобразует напряжение бортовой сети в необходимый каждому блоку уровень напряжения питания. Конструктивно локомотивная аппаратура выполнена в виде шести блоков в корпусах, предназначенных для монтажа на локомотив. Все блоки выполнены на современной элементной базе. Программное обеспечение второго микрокомпьютера создано на языке программирования C++ под операционную систему MsDOS.
Пространственно-временная диаграмма (фиг.3) показывает, как изменяется положение поезда во времени. Пространственная координата 1 увеличивается вправо, а временная координата t - в направлении вверх от начала координат 0. Линия ОП - мировая линия поезда П, представляющая его историю. Точки Т1 и Т2 на линии ОП соответствуют моментам вступления на участок пути первой колесной пары локомотива и последней колесной пары замыкающего вагона поезда длиной L соответственно.
Работа устройства происходит следующим образом.
Координаты датчика положения состава 1 зашиваются во второй микрокомпьютер 10, координаты спутниковой навигационной антенны 3 спутникового навигационного приемника 4 зашиваются в первый микрокомпьютер 2. Моменты вступления первой колесной пары локомотива Т1 и последней колесной пары замыкающего вагона поезда Т2 на датчик положения состава 1 передаются через первый информационный вход в первый микрокомпьютер 2 и фиксируются. Спутниковый навигационный приемник 4 ежесекундно производит прием электромагнитных сигналов от навигационных искусственных спутников Земли (НИСЗ) ГЛОНАСС/GPS посредством спутниковой навигационной антенны 3, вырабатывает и передает навигационно-геодезическую информацию в первый микрокомпьютер 2 через второй информационный вход для выработки мгновенных координат спутниковой навигационной антенны 3 спутникового навигационного приемника 4 в общеземной системе координат и корректирующей поправки в координаты спутниковой навигационной антенны 3 спутникового навигационного приемника 4.
Спутниковый навигационный приемник 9 локомотива ежесекундно производит прием электромагнитных сигналов от НИСЗ ГЛОНАСС/GPS посредством спутниковой навигационной антенны 8, обрабатывает и передает навигационно-геодезическую информацию во второй микрокомпьютер 10 через первый информационный вход для выработки мгновенных координат спутниковой навигационной антенны 8 спутникового навигационного приемника 9 в общеземной системе координат.
После выхода поезда из зоны контроля датчика положения 1 на первый информационный вход первого микрокомпьютера 2 поступает информация о выходе поезда из зоны контроля датчика положения состава 1 и первый микрокомпьютер 2 осуществляет передачу через радиомодем 5, радиостанцию 6 и радиоантенну 7 на локомотив информацию о времени вступления первой колесной пары головы локомотива поезда Т1 и последней колесной пары замыкающего вагона состава Т2 на датчик положения состава 1, а также корректирующие поправки в координаты спутниковой навигационной антенны 3 спутникового навигационного приемника 4 на данные моменты.
На локомотиве через радиоантенну 13, радиостанцию 12 и радиомодем 11 второй микрокомпьютер 10 получает переданную информацию с пункта контроля, поступающую на второй информационный вход второго микрокомпьютера 10. С учетом принятых от пункта контроля корректирующих поправок в мгновенные координаты спутниковой навигационной антенны 3 спутникового навигационного приемника 4 второй микрокомпьютер 10 вырабатывает координаты спутниковой навигационной антенны 8 локомотива на момент вступления первой колесной пары головы локомотива Т1 и последней колесной пары замыкающего вагона состава Т2 на датчик положения состава 1. Если координаты головы локомотива в момент вступлении в зону контроля датчика положения состава 1 равняются координатам датчика положения состава 1 с точностью не хуже 1 м, то устройство считается работоспособным и во втором микрокомпьютере 10 происходит вычисление координат спутниковой навигационной антенны 8 локомотива на момент прохода последней колесной парой замыкающего вагона датчика положения состава 1.
Приращение координат спутниковой навигационной антенны 8 локомотива относительно датчика положения состава 1 в момент прохода последней колесной парой замыкающего вагона датчика положения состава 1 дает истинную длину состава L. Измерение длины состава происходит при выходе поезда из зоны контроля датчика положения состава 1. Измеренная длина состава по каналу PC передается на станцию в систему полуавтоматической блокировки. Участок пути считается свободным, если вышедшая и вымеренная длины состава равны между собой.
При движении состава в обратном направлении (вагонами вперед) принцип работы устройства для определения длины поезда тот же.
Claims (3)
1. Устройство для определения длины поезда, содержащее на пункте контроля подключенный к рельсу датчик положения состава, выход которого подключен к одному из информационных входов первого микрокомпьютера, соединенного через радиомодем с радиостанцией с антенной, а на локомотиве - радиостанцию с антенной, подключенную через радиомодем к одному из информационных входов второго микрокомпьютера, отличающееся тем, что в него введены установленные на пункте контроля спутниковая навигационная антенна, соединенная с первым спутниковым навигационным приемником, выход которого подключен к другому информационному входу первого микрокомпьютера, и установленная на локомотиве спутниковая навигационная антенна, соединенная через второй спутниковый навигационный приемник с другим информационным входом второго микрокомпьютера.
2. Устройство по п.1, отличающееся тем, что второй микрокомпьютер выполнен с возможностью определения длины поезда на пункте контроля посредством определения приращения координат спутниковой антенны локомотива на момент выхода состава из зоны контроля датчика с учетом вносимой поправки в ее координаты, вырабатываемые первым спутниковым навигационным приемником.
3. Устройство по п.2, отличающееся тем, что второй микрокомпьютер выполнен с возможностью определения приращения координат спутниковой антенны локомотива на основании данных, полученных от второго спутникового навигационного приемника, и данных, сформированных первым микрокомпьютером.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2002119151/11A RU2241627C2 (ru) | 2002-07-19 | 2002-07-19 | Устройство для определения длины поезда |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2002119151/11A RU2241627C2 (ru) | 2002-07-19 | 2002-07-19 | Устройство для определения длины поезда |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2002119151A RU2002119151A (ru) | 2004-02-20 |
| RU2241627C2 true RU2241627C2 (ru) | 2004-12-10 |
Family
ID=34387106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2002119151/11A RU2241627C2 (ru) | 2002-07-19 | 2002-07-19 | Устройство для определения длины поезда |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2241627C2 (ru) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2361766C1 (ru) * | 2008-02-27 | 2009-07-20 | Закрытое акционерное общество "ОТРАСЛЕВОЙ ЦЕНТР ВНЕДРЕНИЯ НОВОЙ ТЕХНИКИ И ТЕХНОЛОГИЙ" ("ЗАО "ОЦВ") | Способ управления движением поезда |
| RU2561481C2 (ru) * | 2010-03-18 | 2015-08-27 | Кнорр-Бремзе Зюстеме Фюр Шиненфарцойге Гмбх | Способ и устройство для определения длины поезда |
| RU2684161C1 (ru) * | 2018-05-22 | 2019-04-04 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Российский университет транспорта (МИИТ)" РУТ (МИИТ) | Способ исключения негативного влияния потери шунта |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2063349C1 (ru) * | 1993-10-19 | 1996-07-10 | Государственное предприятие "Научно-исследовательский и проектно-конструкторский институт средств автоматизации на железнодорожном транспорте" | Устройство для контроля местоположения локомотива |
| RU2108627C1 (ru) * | 1991-07-01 | 1998-04-10 | Ланс Хокан | Система индикации положения |
| RU2145423C1 (ru) * | 1997-08-25 | 2000-02-10 | Болдырев Владимир Илларионович | Способ определения координат подвижных объектов, например железнодорожных поездов |
| RU2181490C2 (ru) * | 1995-10-24 | 2002-04-20 | Интернэшнл Мобайл Сэтеллайт Организейшн | Устройство и способ спутникового радиоопределения |
-
2002
- 2002-07-19 RU RU2002119151/11A patent/RU2241627C2/ru not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2108627C1 (ru) * | 1991-07-01 | 1998-04-10 | Ланс Хокан | Система индикации положения |
| RU2063349C1 (ru) * | 1993-10-19 | 1996-07-10 | Государственное предприятие "Научно-исследовательский и проектно-конструкторский институт средств автоматизации на железнодорожном транспорте" | Устройство для контроля местоположения локомотива |
| RU2181490C2 (ru) * | 1995-10-24 | 2002-04-20 | Интернэшнл Мобайл Сэтеллайт Организейшн | Устройство и способ спутникового радиоопределения |
| RU2145423C1 (ru) * | 1997-08-25 | 2000-02-10 | Болдырев Владимир Илларионович | Способ определения координат подвижных объектов, например железнодорожных поездов |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2361766C1 (ru) * | 2008-02-27 | 2009-07-20 | Закрытое акционерное общество "ОТРАСЛЕВОЙ ЦЕНТР ВНЕДРЕНИЯ НОВОЙ ТЕХНИКИ И ТЕХНОЛОГИЙ" ("ЗАО "ОЦВ") | Способ управления движением поезда |
| RU2561481C2 (ru) * | 2010-03-18 | 2015-08-27 | Кнорр-Бремзе Зюстеме Фюр Шиненфарцойге Гмбх | Способ и устройство для определения длины поезда |
| RU2684161C1 (ru) * | 2018-05-22 | 2019-04-04 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Российский университет транспорта (МИИТ)" РУТ (МИИТ) | Способ исключения негативного влияния потери шунта |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2002119151A (ru) | 2004-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1623905B1 (en) | Track identification system | |
| US10967895B2 (en) | Method for safe supervision of train integrity and use of on-board units of an automatic train protection system for supervision train integrity | |
| US10000222B2 (en) | Methods and systems of determining end of train location and clearance of trackside points of interest | |
| US8296065B2 (en) | System and method for vitally determining position and position uncertainty of a railroad vehicle employing diverse sensors including a global positioning system sensor | |
| RU2536271C2 (ru) | Система управления поездом (варианты) | |
| Albrecht et al. | A precise and reliable train positioning system and its use for automation of train operation | |
| US12214815B2 (en) | Method and monitoring system for determining a position of a rail vehicle | |
| EP0791518A1 (en) | Rail navigation system | |
| CN110907976A (zh) | 基于北斗卫星的高速铁路组合导航系统 | |
| CN103612649A (zh) | 基于激光多普勒测速的列车精确定位方法及装置 | |
| EP1705095A1 (en) | Block system and method with intrinsic safety for low railroad traffic density lines | |
| RU2513883C1 (ru) | Система интервального регулирования движения поездов на перегоне | |
| RU2556133C1 (ru) | Система интервального регулирования движения поездов на базе радиоканала | |
| US20080231506A1 (en) | System, method and computer readable media for identifying the track assignment of a locomotive | |
| RU2725332C1 (ru) | Система децентрализованного интервального регулирования движения поездов | |
| De Miguel et al. | Map-aided software enhancement for autonomous GNSS complementary positioning system for railway | |
| JP5225197B2 (ja) | 車両位置検知装置 | |
| Heirich et al. | Measurement methods for train localization with onboard sensors | |
| RU2664023C1 (ru) | Способ и система децентрализованного интервального регулирования движения поездов | |
| RU2241627C2 (ru) | Устройство для определения длины поезда | |
| KR100742967B1 (ko) | 디지피에스 정보 및 철도 선로 정보를 이용한 철도차량위치 추적장치 및 방법 | |
| RU2272731C2 (ru) | Система контроля местоположения подвижного железнодорожного состава | |
| RU2288856C2 (ru) | Система предотвращения столкновения подвижного состава или локомотива с прибывающим или отправляющимся со станции поездом | |
| US11708101B2 (en) | Vehicle orientation determination system | |
| RU2423269C1 (ru) | Устройство контроля за управлением поезда и бдительностью машиниста |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20080720 |
|
| NF4A | Reinstatement of patent |
Effective date: 20110110 |
|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20120720 |