RU2018863C1 - Устройство для контроля подхода к причалу заданной длины судна - Google Patents
Устройство для контроля подхода к причалу заданной длины судна Download PDFInfo
- Publication number
- RU2018863C1 RU2018863C1 SU5043453A RU2018863C1 RU 2018863 C1 RU2018863 C1 RU 2018863C1 SU 5043453 A SU5043453 A SU 5043453A RU 2018863 C1 RU2018863 C1 RU 2018863C1
- Authority
- RU
- Russia
- Prior art keywords
- receiving
- vessel
- approach
- range
- indicator
- Prior art date
Links
- 238000013459 approach Methods 0.000 title claims description 18
- 238000010586 diagram Methods 0.000 claims description 7
- 238000001914 filtration Methods 0.000 abstract description 2
- 238000012545 processing Methods 0.000 abstract description 2
- 238000009434 installation Methods 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 230000005855 radiation Effects 0.000 description 19
- 238000012544 monitoring process Methods 0.000 description 10
- 230000000007 visual effect Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
Images

Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
Использование: в радиолокации. Сущность изобретения: устройство для контроля подхода к причалу заданной длины судна содержит радиолокационные станции, в состав которых входят приемно-излучающие антенны 1, 2, передающие тракты 3, 4, приемные тракты 5, 6, коммутаторы приема-передачи 7, 8, измерители дальности 9, 10, измерители относительной скорости 11, 12, цифровые индикаторы дальности 13, 14 и цифровые индикаторы относительной скорости 15, 16, причем в состав каждого приемного тракта 5(6) входят блок предварительной обработки и фильтрации 17(18) и компаратор 19(20), а также индикатор 21 распределения разности дальности до судна 21 и синхронизатор 22. 3 ил.
Description
Изобретение относится к радиолокационной технике и может быть использовано в морской навигации для определения положения судна относительно причала в условиях ограниченной визуальной видимости.
Известно устройство для контроля подхода судна к причалу, содержащее радиолокационную станцию, установленную на причаливающем судне, ретрансляторы, размещенные в различных точках причала, входящие в состав радиолокационной станции измерители расстояний до ретрансляторов и спецпроцессор, с помощью которого определяется местоположение судна (см. патент США N 4510496, кл. G 01 S 13/42, 1985).
Недостаток известного устройства для контроля подхода судна к причалу заключается в необходимости устанавливать на каждом причаливающем судне радиолокационную станцию со специфическими функциями, которая используется эпизодически (только при причаливании), т. е. для множества судов нужна громоздкая неэффективная система. Кроме того отсутствуют технические средства, с помощью которых определяется местоположение судна.
Указанные недостатки в некоторой степени устранены в устройстве для предупреждения столкновений, которое может быть использовано для контроля подхода судна к причалу, содержащем радиолокационные станции с приемно-излучающими антеннами, передающими и приемными трактами, подключенными к приемно-излучающим антеннам через коммутаторы приема-передачи, измерителями дальности и относительной скорости, соединенными с выходами соответствующих приемных трактов, а также цифровыми индикаторами дальности и относительной скорости, подключенными к выходам соответствующих измерителей, при этом измерители дальности и относительной скорости реализованы на основе вычислительных средств (см. заявку Великобритании N 2093306, кл. G 01 S 13/93, 1982). Это устройство характеризуется совокупностью признаков, сходной с совокупностью существенных признаков изобретения, и выбрано в качестве прототипа. С помощью известного устройства определяются расстояние от причала до некоторой точки судна, направление на судно, относительная скорость, но не представляется оперативная информация о положении судна относительно причала. В результате точность контроля подхода судна к причалу оказывается невысокой. Большой объем вычислительных операций требует соответствующих вычислительных средств, т.е. усложняет устройство.
Изобретение направлено на решение задачи расширения функциональных возможностей устройства, увеличения объема представляемой информации и оперативного определения положения судна в условиях ограниченной визуальной видимости. Дополнительно решается задача упрощения устройства контроля подхода судна к причалу.
Используемые в настоящее время устройства для контроля подхода судна к причалу, реализуемые на основе судовых радиолокаторов, позволяют оценивать положение судна с точностью 20-25 м, когда расстояние между судном и причалом больше 100 м. Положение судна на меньших расстояниях в условиях ограниченной видимости вообще не контролируется. Но более опасным для тяжелоинерционного судна является отсутствие информации о скорости изменения его положения (особенно оконечностей) относительно причала.
Для достижения поставленной цели в известное устройство для контроля подхода судна к причалу, содержащее радиолокационные станции с приемно-излучающими антеннами, передающими и приемными трактами, подключенными к приемно-излучающим антеннам через коммутаторы приема-передачи, измерителями дальности и относительной скорости, соединенными с выходами соответствующих приемных трактов, а также цифровыми индикаторами дальности и относительной скорости, введен индикатор распределения дальности до судна, входы которого соединены с выходами измерителей дальности всех радиолокационных станций, приемно-излучающие антенны установлены на прямой линии вдоль причала так, что оси их основных диаграмм направленности с угловым раствором 6-12о параллельны, отношение расстояния между осями основных диаграмм соседних приемно-излучающих антенн к длине корпуса причаливающего судна находится в пределах (0,2-0,5), а ось дополнительной диаграммы с угловым раствором 6-12о одной из крайних приемно-излучающих антенн отклонена от параллельных осей основных диаграмм на угол 25-50о и не пересекается с ними.
Введение индикатора распределения дальности до судна, соединение его входов с выходами измерителей дальности до судна всех радиолокационных станций, установка приемно-излучающих антенн на прямой линии вдоль причала так, что оси их основных диаграмм направленности с угловым раствором 6-12о параллельны, выбор отношения расстояния между осями основных диаграмм направленности соседних приемно-излучающих антенн к длине корпуса причаливающего судна в пределах 0,2-0,5 и к отклонению оси дополнительной диаграммы направленности одной из крайних приемно-излучающих антенн от параллельных осей основных диаграмм направленности на угол 25-50о с условием непересечения с ними, являются отличительными признаками от прототипа. Без потери общности радиолокационные станции могут быть синхронизированы или работать автономно, имея свой синхронизатор. В частном случае использования изобретения приемно-излучающие антенны установлены эквидистантно.
Технический результат - расширение функциональных возможностей, увеличение объема представляемой информации, оперативное определение положения судна относительно причала в условиях ограниченной визуальной видимости - достигается за счет введения индикатора распределения дальности до судна, связи расстояний между соседними приемно-излучающими антеннами с длиной корпуса причаливающего судна. С помощью дополнительной диаграммы направленности судно обнаруживается на подходе к причалу, т.е. этот признак усиливает основной технический результат.
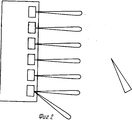
На фиг. 1 показана структурная схема устройства для контроля подхода судна к причалу; на фиг.2 - расположение приемно-излучающих антенн на причале и судна относительно причала; на фиг.3 - информационное табло индикатора.
Устройство для контроля подхода судна к причалу содержит радиолокационные станции с приемно-излучающими антеннами 1 и 2 (рассматривается случай двух антенн с двумя диаграммами направленности), передающими 3 и 4 и приемными 5 и 6 трактами, подключенными к приемно-излучающим антеннам 1 и 2 через коммутаторы приема-передачи 7 и 8, измерителями дальности 9 и 10 и относительной скорости 11 и 12, соединенными с выходами соответствующих приемных трактов, а также цифровыми индикаторами дальности 13 и 14 и относительной скорости 15 и 16, подключенными к выходам соответствующих измерителей. Каждый приемный тракт 5 и 6 образован последовательным соединением блока предварительной обработки и фильтрации 17 (18) и компаратора 19 (20). Входы индикатора 21 распределения дальности до судна соединены с дополнительными выходами измерителей дальности 9 и 10. Выход общего для всех радиолокационных станций синхронизатора 22 подключены к соответствующим входам передающих трактов 3 и 4, коммутаторов приема-передачи 7 и 8, измерителей дальности 9 и 10 и измерителей относительной скорости 11 и 12. Если радиолокационные станции не синхронизированы, синхронизатор входит в каждую станцию.
Приемно-излучающие антенны 1,2, (случай шести антенн с семью диаграммами направленности) установлены на причале и имеют диаграммы направленности в режимах излучения и приема. Особенность антенны заключается в том, что она имеет две рабочие поверхности, которым соответствуют диаграммы направленности. Антенна может быть многоэлементной. В этом случае для формирования двух диаграмм направленности используется диаграммообразующая схема с двумя выходами. Антенны 1, 2, также могут быть многоэлементными и содержать диаграммообразующую схему с одним выходом. Судно находится на некотором расстоянии от причала.
Информационное табло индикатора содержит цифровые указатели дальности и относительной скорости, а также матричное поле светодиодов с линейками (N= 6). Число светодиодов в каждой линейке М.
В целом устройство для контроля подхода судна к причалу можно представить как развитие многоканальной радиолокационной станции, излучающей и принимающей сигналы в N разнесенных точках, причем излучение и прием производятся по (N+1) направлениям. Соответственно в устройство входят приемно-излучающие антенны (на фиг.3 показаны шесть антенн), формирующие (N+1) диаграмм направленности. Структурная схема устройства для контроля подхода судна к причалу содержит (N+1) каналов излучения, приема и обработки сигналов (на фиг.1 показаны два канала). Устройство содержит также (N+1) измерителей дальности. Светодиодное табло состоит из (N+1) линеек (на чертеже показано семь линеек).
Устройство для контроля подхода судна к причалу работает следующим образом.
Синхронизирующим импульсом коммутаторы приема-передачи 7 и 8 подключают приемно-излучающие антенны 1 и 2 к передающим трактам 3 и 4, в которых формируются зондирующие сигналы. По окончании зондирующего излучения коммутаторы приема-передачи 7 и 8 подключают антенны 1 и 2 к приемным трактам 5 и 6.
При излучении частотно-модулированных зондирующих сигналов вместо импульсного измерения дальности применяется частотный метод. Относительная скорость судна определяется доплеровским методом.
На информационном табло индикатора отображаются с помощью указателей значения дальностей до судна и относительных скоростей, а с помощью светодиодных линеек распределение дальности до судна относительно линии излучения. Дальность отображается с дискретностью 0,5 м, относительная скорость - с дискретностью 0,1 м/с (на цифровых указателях). Индикатор распределения дальности позволяет оперативно наблюдать положение судна относительно причала. Расстояние до судна при его подходе оценивается по светодиодной линейке (приближенно).
Отношение расстояния между осями основных диаграмм направленности соседних приемно-излучающих антенн к длине корпуса судна в пределах (0,2-0,5) выдерживается установкой требуемого числа приемно-излучающих антенн. Ширина диаграмм направленности оптимизирована с точки зрения разрешающей способности устройства и уровня отраженных сигналов.
Возможны два варианта использования изобретения. В одном случае вся аппаратура размещается на берегу, а лоцману на судно по каналу связи сообщается информация о дальностях, относительных скоростях и распределении дальности (т.е. о положении судна), как это делается при проводке. В другом случае индикатор распределения дальности выполняется переносным и придается лоцману. Информация, необходимая для функционирования индикатора, передается по радиоканалу. На берегу сохраняется контрольный индикатор, т.е. и в такой системе изобретение используется.
При подходе судно попадает в зону действия диаграммы направленности, о чем свидетельствуют сигналы светодиодной линейки. С помощью буксиров судно разворачивается параллельно причалу. Затем буксиры, компенсируя ветер и течение, регулируют скорость сближения судна с причалом, их взаимную параллельность и мягкость контакта. Для этого необходимо знать положение судна относительно причала, скорость и тенденцию сближения с ним. Получение этой информации обеспечивается совокупностью существенных признаков изобретения.
Claims (1)
- УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДХОДА К ПРИЧАЛУ ЗАДАННОЙ ДЛИНЫ СУДНА, содержащее радиолокационные станции, в состав каждой из которых входят приемно-излучающая антенна, соединенная через коммутатор приема-передачи с выходом передающего тракта и со входом приемного тракта, первый выход которого через измеритель дальности соединен с входом цифрового индикатора дальности, а второй выход соединен через измеритель относительной скорости с входом цифрового индикатора относительной скорости, отличающееся тем, что в него введен индикатор распределения дальности до судна, входы которого соединены с дополнительными выходами измерителей дальности всех радиолокационных станций, приемно-излучающие антенны которых установлены на прямой линии вдоль причала, их оси основных диаграмм направленности параллельны, угловые растворы каждой из них составляют 6 - 12o, а расстояния между ними 0,2 - 0,5 заданной длины судна, ось дополнительной диаграммы направленности с угловым раствором 6 - 12o одной из крайних приемно-излучающих антенн отклонена от параллельных осей основных диаграмм направленности всех приемно-излучающих антенн на угол 25 - 50o.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU5043453 RU2018863C1 (ru) | 1992-03-17 | 1992-03-17 | Устройство для контроля подхода к причалу заданной длины судна |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU5043453 RU2018863C1 (ru) | 1992-03-17 | 1992-03-17 | Устройство для контроля подхода к причалу заданной длины судна |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2018863C1 true RU2018863C1 (ru) | 1994-08-30 |
Family
ID=21604874
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| SU5043453 RU2018863C1 (ru) | 1992-03-17 | 1992-03-17 | Устройство для контроля подхода к причалу заданной длины судна |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2018863C1 (ru) |
-
1992
- 1992-03-17 RU SU5043453 patent/RU2018863C1/ru active
Non-Patent Citations (2)
| Title |
|---|
| 1. Патент США N 4510496, кл. G 01S 13/42, 1985. * |
| 2. Заявка Великобритании N 2093306, кл. G 01S 13/93, 1982. * |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US3886554A (en) | Method and apparatus for improving the accuracy of a vehicle location system | |
| US6501704B2 (en) | Underwater object positioning system | |
| US4052693A (en) | Depth sounder | |
| JPS6019470B2 (ja) | 船舶位置検出装置 | |
| GB2027888A (en) | Method of and apparatus for sonar detecting and the like with plural substantially orthogonal radiation beams | |
| CA2993361A1 (en) | Forward scanning sonar system and method with angled fan beams | |
| GB2525757A (en) | Underwater detection apparatus, underwater detection method and underwater detection program | |
| CN214124135U (zh) | 天线通信系统 | |
| EP0325539A1 (en) | Positioning system for a moving object | |
| RU2018863C1 (ru) | Устройство для контроля подхода к причалу заданной длины судна | |
| RU2018862C1 (ru) | Способ контроля подхода к причалу заданной длины l судна | |
| JPS59107285A (ja) | 海底地形表示装置 | |
| GB2093306A (en) | Multiple Radar Combination System | |
| JPH0425507B2 (ru) | ||
| RU2097784C1 (ru) | Способ автономной выработки информации для проводки судов в узких фарватерах и устройство для его осуществления | |
| RU2760343C1 (ru) | Мультиагентный программно-аппаратный комплекс сбора, передачи, обработки, отображения данных для выполнения гидрографической съемки водоемов и оперативного мониторинга изменения рельефа дна | |
| RU2005102028A (ru) | Способ определения пространственного положения объекта | |
| RU2617134C2 (ru) | Гидроакустическая система подводной навигации | |
| US3302203A (en) | Electronic channel guidance system | |
| US3267417A (en) | Navigation of marked channels | |
| GB2094089A (en) | Distant transmitter range measurement | |
| US2703880A (en) | Radio object locating system | |
| JPH10206537A (ja) | レーダ補助装置 | |
| US4121210A (en) | Two dimensional MIPS | |
| RU2830066C1 (ru) | Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации |