RU2012143786A - METHOD FOR DETERMINING GOAL COORDINATES IN A THREE-POSITION LARGE-DIMENSIONAL RADAR SYSTEM - Google Patents
METHOD FOR DETERMINING GOAL COORDINATES IN A THREE-POSITION LARGE-DIMENSIONAL RADAR SYSTEM Download PDFInfo
- Publication number
- RU2012143786A RU2012143786A RU2012143786/07A RU2012143786A RU2012143786A RU 2012143786 A RU2012143786 A RU 2012143786A RU 2012143786/07 A RU2012143786/07 A RU 2012143786/07A RU 2012143786 A RU2012143786 A RU 2012143786A RU 2012143786 A RU2012143786 A RU 2012143786A
- Authority
- RU
- Russia
- Prior art keywords
- positions
- target
- change
- speed
- range
- Prior art date
Links
- 230000005855 radiation Effects 0.000 claims abstract 2
Landscapes
- Radar Systems Or Details Thereof (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
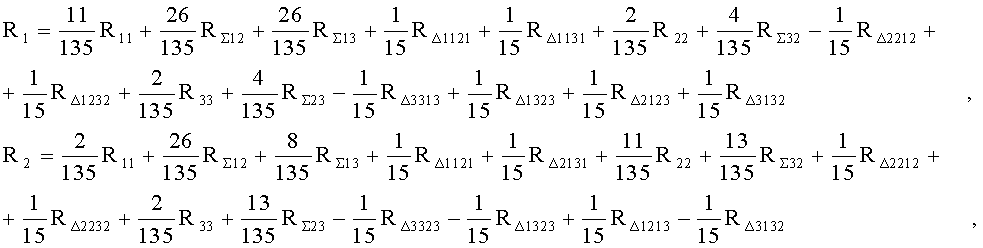
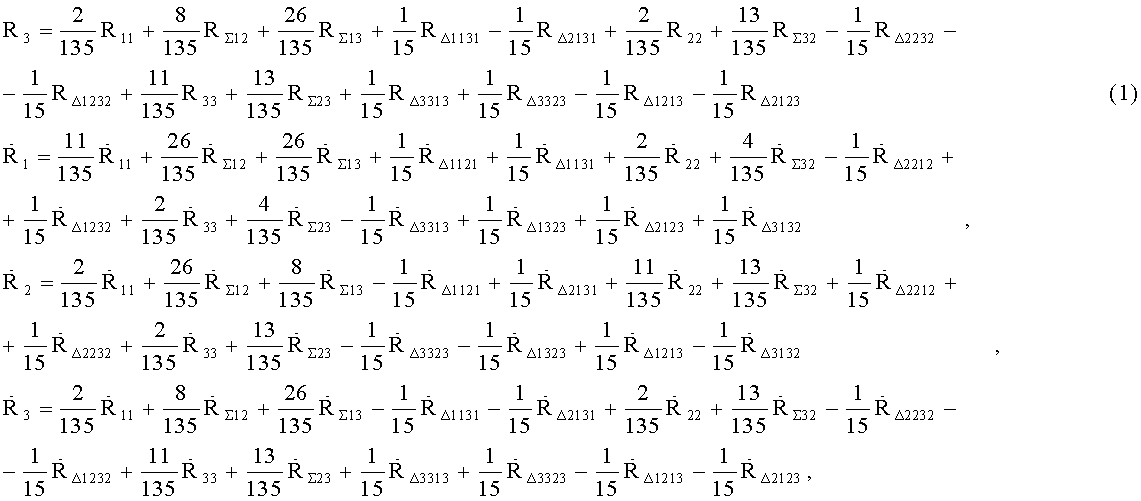
Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе, включающий на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, определение координат цели, отличающийся тем, что на каждой позиции дополнительно измеряют скорости изменения дальности, принимают отраженные от цели сигналы, излученные двумя другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам две суммы дальностей и скорости их изменения от этой позиции до цели и от цели до двух других позиций и три попарные разности дальностей и скорости их изменения от первой, второй и третьей позиций до цели, передают сигналы, соответствующие измеренным значениям дальности и скоростям их изменения, суммы и разности дальностей и скорости их изменения на две другие позиции, измеряют три разности сумм расстояний и скорости их изменения между позициями системы, вычисляют уточненные значения дальности и скорости их изменения от первой, второй и третьей позиций до цели по формулам:где R, R, R- вычисленные значения дальности от первой, второй и третьей позиций до цели соответственно;R, R, R- измеренные значения дальности на первой, второй и третьей позициях соответственно;R, R, R, R, R, R- измеренные значения сумм расстояний на первой, второй и третьей позициях соответственно;R, R, R, R, R, ,R, R, R, R- измеренные значения разности расстояний на первой, второй и третьей позициях соответственно;R, R, R- измеренные значения разности расстояний между второй и третьей, первой иA method for determining the coordinates of a target in a three-position rangefinder radar system, including at each position the radiation of sounding signals, receiving the signals reflected from the target emitted by this position, measuring from the received signals from the range from this position to the target, determining the coordinates of the target, characterized in that at each position additionally measure the rate of change of range, receive the signals reflected from the target, emitted by two other positions, divide the received signals by belonging to the emitting them According to the received signals, they measure two sums of ranges and their speed of change from this position to the target and from the target to two other positions and three pairwise differences of ranges and their speed of change from the first, second and third positions to the target, transmit signals corresponding to the measured values the ranges and speeds of their change, the sum and difference of ranges and the speed of their change to two other positions, measure the three differences of the sum of the distances and the speed of their change between the positions of the system, calculate the adjusted values of the range and speed These changes from the first, second and third positions to the target according to the formulas: where R, R, R are the calculated range values from the first, second and third positions to the target, respectively; R, R, R are the measured range values at the first, second and third positions, respectively; R, R, R, R, R, R - measured values of the sums of distances at the first, second and third positions, respectively; R, R, R, R, R, R,, R, R, R, R - measured values distance differences at the first, second and third positions, respectively; R, R, R - measured values of the distance difference between the second and third, first and
Claims (1)

Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2012143786/07A RU2515571C1 (en) | 2012-10-05 | 2012-10-05 | Method of determining coordinates of target in three-position ranging radar system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2012143786/07A RU2515571C1 (en) | 2012-10-05 | 2012-10-05 | Method of determining coordinates of target in three-position ranging radar system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2012143786A true RU2012143786A (en) | 2014-04-10 |
| RU2515571C1 RU2515571C1 (en) | 2014-05-10 |
Family
ID=50436001
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2012143786/07A RU2515571C1 (en) | 2012-10-05 | 2012-10-05 | Method of determining coordinates of target in three-position ranging radar system |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2515571C1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2607639C2 (en) * | 2014-12-31 | 2017-01-10 | Федеральное государственное бюджетное учреждение "4 Центральный научно-исследовательский институт" Министерства обороны Российской Федерации | Method of determining range to object with radiation source signals with different frequencies |
| RU2713498C1 (en) * | 2019-07-19 | 2020-02-05 | Федеральное государственное унитарное предприятие "Ростовский-на-Дону научно-исследовательский институт радиосвязи" (ФГУП "РНИИРС") | Method for survey active-passive lateral radar ranging of aerospace objects |
| RU2717970C1 (en) * | 2019-10-07 | 2020-03-27 | Федеральное государственное унитарное предприятие "Ростовский-на-Дону научно-исследовательский институт радиосвязи" (ФГУП "РНИИРС") | Method for survey three-coordinate two-position lateration radar ranging of aerospace objects |
| RU2759198C1 (en) * | 2020-06-30 | 2021-11-10 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Санкт-Петербургский государственный университет телекоммуникаций им. проф. М.А. Бонч-Бруевича" | Method for determining the coordinates and parameters of movement of targets in a range measuring multi-positional radio location system |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5406291A (en) * | 1993-10-05 | 1995-04-11 | Grumman Aerospace Corporation | Passive emitter location system |
| FR2764074B1 (en) * | 1997-06-03 | 1999-08-20 | Thomson Csf | TRANSMISSION COOPERATIVE RADIOGONIOMETRY METHOD AND DEVICE |
| US6768459B2 (en) * | 2002-07-31 | 2004-07-27 | Interdigital Technology Corporation | Method and system for positioning mobile units based on angle measurements |
| RU2309420C1 (en) * | 2006-02-02 | 2007-10-27 | Военно-космическая академия имени А.Ф. Можайского | Time-difference method of finding coordinates of radio source and device for realization of the method |
| RU2363010C2 (en) * | 2007-06-06 | 2009-07-27 | Военно-космическая академия имени А.Ф. Можайского | Method of determining coordinates of radio-frequency radiation source and device to this end |
| RU2382378C1 (en) * | 2008-06-05 | 2010-02-20 | Государственное образовательное учреждение высшего профессионального образования "Военно-космическая академия имени А.Ф. Можайского" | Spaced differential-ranging direction finder |
| FR2940462B1 (en) * | 2008-12-23 | 2012-01-20 | Thales Sa | METHOD FOR LOCALIZATION BY MULTI-CHANNEL ESTIMATION OF TDOA AND FDOA OF MULTI-PATH OF A SOURCE WITH OR WITHOUT AOA |
-
2012
- 2012-10-05 RU RU2012143786/07A patent/RU2515571C1/en active IP Right Revival
Also Published As
| Publication number | Publication date |
|---|---|
| RU2515571C1 (en) | 2014-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3540464A3 (en) | Ranging method based on laser radar system, device and readable storage medium | |
| WO2017149526A3 (en) | A method and apparatus for cooperative usage of multiple distance meters | |
| JP2016042075A5 (en) | ||
| RU2013135115A (en) | MANUAL LASER RANGE | |
| GB2504432A (en) | Laser tracker that combines two different wavelengths with a fiber-optic coupler | |
| RU2624461C1 (en) | Method of determining coordinates of object | |
| CN103376447B (en) | A kind of method realizing the two multistatic radar target three-dimensional localization of non-cooperation | |
| NZ623023A (en) | Apparatus for measuring the position of a vehicle or a surface thereof | |
| RU2624457C1 (en) | Method of determining coordinates of object | |
| RU2012143786A (en) | METHOD FOR DETERMINING GOAL COORDINATES IN A THREE-POSITION LARGE-DIMENSIONAL RADAR SYSTEM | |
| PL434861A1 (en) | Method and apparaturs for measuring vehicle speed | |
| CN103017682A (en) | Method for measuring geometrical shape of large-scale structure with rangefinders | |
| CN105467363A (en) | Triangular positioning system and method based on visible light | |
| RU2687057C1 (en) | Method of determining coordinates of a moving object | |
| RU2010108596A (en) | METHOD FOR DETERMINING THE RANGE TO THE SURFACE OF THE EARTH | |
| RU2012111879A (en) | METHOD FOR DETERMINING THE LOCATION OF A RADIO EMISSION SOURCE | |
| SE0201818D0 (en) | Ways to determine the locations of the targets by means of bistatic measurements with signals spread from the target | |
| RU2530231C1 (en) | Radio signal transmission and reception method | |
| RU90574U1 (en) | ACTIVE HYDROLOCATOR | |
| RU2005114045A (en) | METHOD FOR DETERMINING COORDINATES OF A RADIO EMISSION SOURCE (OPTIONS) AND A RADAR STATION FOR ITS IMPLEMENTATION | |
| RU2014154357A (en) | The method of determining the spatial coordinates of the source of radio emission | |
| RU2011119863A (en) | METHOD FOR DETERMINING GOAL COORDINATES IN A THREE-POSITION LARGE-DIMENSIONAL RADAR SYSTEM | |
| RU2015125858A (en) | METHOD OF DETERMINING LOCATION SOUND ARROW SHOT | |
| RU2010143468A (en) | METHOD OF LASER LOCATION | |
| RU2496117C1 (en) | Method of measuring displacement parameters of probing signal source |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20181006 |
|
| NF4A | Reinstatement of patent |
Effective date: 20211101 |