KR900004464B1 - Cassette eject mechanism for cassette deck - Google Patents
Cassette eject mechanism for cassette deck Download PDFInfo
- Publication number
- KR900004464B1 KR900004464B1 KR1019840006185A KR840006185A KR900004464B1 KR 900004464 B1 KR900004464 B1 KR 900004464B1 KR 1019840006185 A KR1019840006185 A KR 1019840006185A KR 840006185 A KR840006185 A KR 840006185A KR 900004464 B1 KR900004464 B1 KR 900004464B1
- Authority
- KR
- South Korea
- Prior art keywords
- lever
- arm
- cassette
- sensing
- cam
- Prior art date
Links
Images

















Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B15/00—Driving, starting or stopping record carriers of filamentary or web form; Driving both such record carriers and heads; Guiding such record carriers or containers therefor; Control thereof; Control of operating function
- G11B15/675—Guiding containers, e.g. loading, ejecting cassettes
Abstract
Description
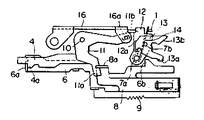
제1도는 본 발명에 의한 카세트 데크를 표시하는 개략 평면도.1 is a schematic plan view showing a cassette deck according to the present invention.
제2도는 그 개략 측면도.2 is a schematic side view thereof.
제3도 내지 제5도는 카세트 장전 동작 설명도.3 to 5 are diagrams illustrating a cassette loading operation.
제6도 내지 제9도는 카세트 이젝트 동작 설명도.6 to 9 are diagrams illustrating a cassette eject operation.
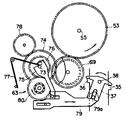
제10도는 제1도에 있어서 리일 유니트 구동기구의 개략 평면도.10 is a schematic plan view of the rail unit driving mechanism in FIG.
제11도는 FF/REW 동력전달기구부의 구성도.11 is a configuration diagram of the FF / REW power transmission mechanism.
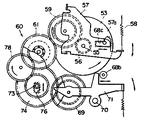
제12도는 정속/고속동력 전달기구부의 구성도.12 is a configuration of the constant speed / high speed power transmission mechanism.
제13도는 센싱(sensing)기구의 일예를 표시한 구성도.13 is a configuration diagram showing an example of a sensing mechanism.
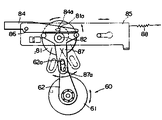
제14도는 센싱기구의 리세트 동작 설명도.14 is an explanatory diagram of reset operation of a sensing mechanism.
제15도 및 제16도는 선별레버 및 센싱동력레버의 동작 설명도.15 and 16 are explanatory views of operations of the selection lever and the sensing power lever.
제17도는 록 아암의 고정 해제 동작 설명도.17 is an explanatory view of the unlocking operation of the lock arm.
제18도는 헤드대의 전진 동작 설명도.18 is an explanatory diagram of the forward movement of the head stand.
제19도는 헤드대의 고정 해제 동작 설명도.19 is an explanatory view of the release operation of the head stand.
제20도 및 제21도는 FF 및 REW동작 설명도.20 and 21 are explanatory views of the FF and REW operations.
제22a도 및 (b)는 FF레버의 그릴 개구에 대한 위치결정을 표시하는 평면도 및 측면도.22A and 22B are a plan view and a side view showing positioning of the grill opening of the FF lever.
* 도면의 주요부분에 대한 부호의 설명* Explanation of symbols for main parts of the drawings
2 : 카세트압압레버 3 : 제1아암2: cassette press lever 3: first arm
4 : 제1레버 6 : 제2레버4: first lever 6: second lever
8 : 제3레버 11 : 요동레버8: third lever 11: rocking lever
12 : 규제아암 13 : 록 아암12: regulating arm 13: rock arm
15 : 카세트하아프 16 : 카세트호울더15: cassette half 16: cassette holder
25 : 헤드 28 : FF레버25: head 28: FF lever
29 : REW 레버 34 : 그릴29: REW lever 34: grill
37 : 제2아암 42 : 선별레버37: second arm 42: selection lever
50 : 모우터 53 : 플라이호일기어50: motor 53: fly foil gear
55 : 캡스턴 57 : 아이들러아암55
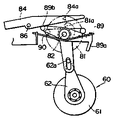
60, 63 : 리일유니트 62 : 센싱해제아암60, 63: Rial unit 62: Sensing release arm
68 : 헤드대 74 : 아이들러기어68: head stand 74: idler gear
81 : 캠기어 84 : 센싱아암81: cam gear 84: sensing arm
89 : 리세트아암 100 : 핀치 로울러89: reset arm 100: pinch roller
본 발명은 카세트데크에 관한 것이며, 특히 카세트 데크에 있어서 이젝트 기구의 기동기구에 관한 것이다. 카세트데크는 근년에 점차 소형화되는 경향에 있으며 특히 차재용 카세트 데크에 있어서는 카세트 데크의 수용되어야할 공간에 한계가 있기 때문에 카세트 데크의 소형화 박형화의 요청이 강하게 있었다.TECHNICAL FIELD The present invention relates to a cassette deck, and more particularly to a start mechanism of an eject mechanism in a cassette deck. Cassette decks have tended to become smaller in recent years, and in particular, in the on-vehicle cassette decks, there is a strong demand for miniaturization of cassette decks due to the limited space to be accommodated in the cassette decks.
그래서 본 발명은 기구를 단순화하여 카세트 데크의 소형화, 박형화에 기여할 수 있는 동시에 기구의 동작이 확실한 이젝트기구의 기동기구를 제공하는 것을 목적으로 한다.It is therefore an object of the present invention to provide a start mechanism of an eject mechanism, which can simplify the mechanism and contribute to miniaturization and thinning of the cassette deck and at the same time ensure the operation of the mechanism.
본 발명에 의한 이젝트기구의 기동기구에 있어서는 왕복동작이 자유롭게 설치되어서 그 왕복로에서 이젝트기구의 기동을 담당하는 동력 레버에 센싱아암을 회전이 가능하게 지지하며, 리일유니트의 회전정지때에 그 센싱아암이 리일유니트 구동모우터를 동력원으로 하는 회전캠기구와 걸어맞춤으로서 동력레버를 왕복동작시키며, 또한 연주위치에 장진된 카세트 하아트와 걸어맞춤이 가능하게 리세트 아암을 설치, 카세트 하아프가 이젝트된때에는 그 리세트 아암에 의해서 그 센싱아암을 요동시켜서 그 회전캠 기구와의 걸어맞춤을 강제적으로 해제하는 구성으로 되어 있다.In the start mechanism of the ejection mechanism according to the present invention, the reciprocating motion is freely installed, and the sensing arm is rotatably supported by a power lever that is responsible for the start of the ejection mechanism in the reciprocating path, and the sensing unit rotates when the rail unit stops rotating. The arm reciprocates the power lever by engaging a rotating cam mechanism powered by a real unit drive motor, and a reset arm is installed to allow the arm to engage with the cassette harat loaded at the playing position. At the time of ejection, the sensing arm is swung by the reset arm to forcibly release the engagement with the rotary cam mechanism.
다음 도면에 의거하여 본 발명의 실시예를 설명한다.An embodiment of the present invention will be described based on the following drawings.
제1도 및 제2도는 본 발명에 의한 카세트 데크를 표시한 개략평면도 및 개략 측면도이다.1 and 2 are schematic plan views and schematic side views showing a cassette deck according to the present invention.
제1및 제2도에 있어서 사이드 플레임(1)에는 카세트 압압레버(2)가 도면의 좌우방향에 있어서 접동이 자유롭게 걸어맞추어지며 또한 제1아암((3)이 축(3a)을 중심하여 요동이 자유롭게 추지되어 있다(제3도 참조). 제1아암(3)은 그 선단부에 형성된 장공(3b)에서 카세트 압압레버(2)에 설치된 핀(2a)에 걸어맞추어 있으며, 카세트하아프(15)의 장전시, 제3도에 표시한 바와같이, 카세트 압압레버(2)의 도면의 좌측방향으로의 이동에 의해서 반시계방향으로 요동한다. 카세트 압압레버(2)의 선단은 삽입된 카세트 하아프(15)의 후단이 맞닿아지도록 대략 L자형으로 굴곡되어 있다. 제1아암(3)에는 제1레버(4)가 요동 가능하게 지지되며, 당해 제1레버(4)는 제1아암(3)의 요동에 의해서 도면의 좌방향 즉 카세트 삽입방향으로 이동하여 이 이동시 스프링(5)에 의하여 사이드 플레임(1)에 대하여 도면의 우방향으로 부세된다.In FIG. 1 and FIG. 2, the cassette
제2레버(6)는 사이드 플레임(1)에 대하여 도면의 좌우 방향에 있어서 접동 자유롭게 걸어맞춤이 되어 있으며 제4도에 표시한 바와같이 제1레버(4)의 좌방향으로의 이동시 그 선단부에 설치된 돌기(6a)에서 제1레버(4)의 클릭(4a)에 걸어맞춤이 되므로서 제1레버(4)와 동시에 카세트 삽입방향(도면의 좌방향)으로 이동이 된다.The
제2레버(6)에는 제3레버(8)가 접동 자유로이 부착되어 또한 스프링(9)에 의해서 제2레버(6)에 대하여 카세트 삽입방향으로 부세되어 있다. 제3레버(8)는 제4도에서 명백한 바와같이 사이드 플레임(I)에 대하여 축(10)에 의해서 요동자유롭게 추지된 요동아암(11)의 일단(11a)에 그의 선단(8a)에서 걸어 맞춤하여 스프링(9)의 부세력에 의해서 요동아암(11)을 시계방향으로 부세한다.The
사이드 플레임(1)에 대하여 규제아암(12)이 축(7a)에 의해서 요동이 자유롭게 추지되며 이 규제아암(12)에는 록아암(13)이 축(7b)에 의해서 요동 자유로이 추지되어 있으며 제4도에 표시된 바와같이 축(7a)의 주위에 설치되어 일단이 사이드 플레임(1)에 타단이 록아암(13)에 각각 걸어맞춤이 된 스프링(14)에 의해서 규제아암(12)이 반시계 방향으로 록아암(13)이 시계 방향으로 각각 부세되어 있다. 록아암(13)은 그 하단부(13a)가 제2레버(6)의 돌부(6b)에 걸어맞춤이 되어 있으며, 카세트하아프(15)의 장전시에 카세트 압압레버(2)에 연동하여 제2레버(6)의 돌부(6b)가 도면의 좌방향으로 이동하므로서 스프링(14)의 부세력에 의하여 시계방향으로 요동하여 카세트 하아프(15)가 완전이 안쪽으로 삽입된때에 제5도에 표시한 바와같이 카세트 압압레버(2)의 전단절곡부(2b)를 그의 후크부(13b)에서 고정이 된다.The
카세트 호울더(16)는 사이드플레임(1)에 대하여 요동자유로이 추지되어 있으며 그 중간부에서 핀(16a)을 통하여 요동아암(11)의 선단장공(11b)에 걸어맞춤이 되어 있다. 그 결과 카세트 호울더(16)는 요동아암(11) 및 제3레버(8)를 통하여 스프링(9)에 의하여 도면의 시계방향으로 부세되므로서 제4도에서 명백한 바와같이 규제아암(12)의 단차부(12a)에 걸어맞춤이 되므로써 그 요동이 규제된다. 그리고 카세프 하아프(15)가 완전히 안쪽까지 삽입되어서 카세트 압압레버(2)의 절곡부(2b)가 록아암(13)에 의하여 고정이 되면 카세트 압압레버(2)에 작용하여 있는 스프링(5) 및(9)의 부세력에 의해서 록아암(13)을 통하여 규제아암(12)이 근소하게 시계방향으로 요동시킴으로써 제5도에 표시한 바와 같이 카세트 호울더(16)의 요동 규제가 해제된다. 이것에 의해서 카세트 호울더(16)는 요동아암(11)에 작용되어 있는 부세력에 의해서 시계방향으로 요동하여 완전히 안쪽까지 삽입된 카세트 하아프(15)를 연주위치까지 밀어내린다. 28은 테이프의 빨리보내기(FF)를 지령하는 FF, 29는 테이프의 되감기(REW)를 지령하는 REW레버이며, 이들 레버(28,29)는 긴 판상부재로 되며 서로 접동이 가능하게 포개어 합쳐서 장치의 전면부(도면의 우측부)에서 후부(도면의 좌측부)에 걸쳐서 뻗어있다.The
레버(28,29)위에는 또한 긴판상의 캠레버(30)가 접동가능하게 포개어 합쳐져 있으며 이들 3장의 레버(28,29,30)은 각 양단부에 형성된 장공(28a,29a,30a) 및(28b, 29b, 30b)에서 샤시(17)에 고착된 축(31a) 및 (31b)에 접동 자유롭게 걸어맞춤이 되어 있다. 캠레버(30)의 장공(30b)이 폭의 축(31b)의 직경에 대략 같은데 대하여 레버(28,29)의 장공(28b,29b)의 폭은 제22a도에 표시한 바와같이 축(31b)의 주벽과의 사이에 좌우에 각각 소정의 극간(t)이 생기는 정도로 축(31b)의 직경보다 다르게 형성되어 있으며, 이것에 의해서 레버(28,29)는 제22a도,(b)도에 표시한 바와같이 선단부의 장공(28a,29a)에서 걸어맞춤이된 축(31a)을 중심으로 장공(28b,29b)의 폭방향 및 축(31b)의 축방향에서 요동이 가능하게 된다. 그 결과 레버(28,29)의 각 조작 보턴(32,33)을 그릴(34)의 개구(34a)에 장착할 때 장치본체와 그릴(34)과의 상대적인 위치 어긋남등이 생겨도 그릴(34)의 개구(34a)에 대하는 각 조작보턴(32,33)의 위치 결정을 확실하게 행할 수 있게 된다. 또한 제22a,(b)도에는 FF 레버(28)만이 표시되어 있으나 REW 레버(29)에 대하여도 같은 구성으로 되어 있다.On the
FF 레버(28), REW 레버(29)에는 각각 절곡부(35,36)가 형성되어 있고, 이들 절곡부(35,36)는 제2아암(37)의 양단돌부(37a,37b)에 맞닿아 있다. 제2아암(37)은 캠레버(30)에 고정된 핀(38)에 부착되어 있다.The
또 캠레버(30)와 축(31b)과의 사이에는 스프링(39)이 장치되어 있다. 여기서 FF 레버(28) 및 REW 레버(29)는 단독으로 압압된때에는 FF 및 REW를 지령으로 하는 조작레버로서 작용을 하나 쌍방이 동시에 압압된때에는 이젝트(EJECT)를 지령하는 조작레버로서 작용을 한다. 즉 양레버(28,29)가 동시에 압압된 때의 핀(38)의 이동량은 각각 단독으로 압압된 때의 이동량보다 크게되며 이 이동량의 다름에 의하여 이젝트 동작을 행한다. 또한 FF 레버(28) 및 REW 레버(29)를 단독으로 조작한때는 후술하는 록기구에 의해서 고정이 되나 양레버(28,29)가 동시에 압압된 때에는 고정이 되지 않도록 되어 있다.A
핀(38)의 이동량이 그대로 캠레버(30)이 이동량으로 되며 캠레버(30)는 FF 레버(28) 및 REW 레버(29)의 동시 압압에 의한 이젝트 조작에 따라서 도면의 좌방향으로의 소정량이 이동되었을때는 클릭(30c)이 요동자유로운 제3아암(40)의 일단이 맞닿아서 이것을 반시계 방향으로 요동시킨다. 이러므로서 제3아암(40)의 타단은 스프링(41)에 의해서 도면의 상방향으로 부세된 선별 레버(42)를 통하여 요동이 자유로운 록해제레버(43)의 일단 43a을 압압하여 이것을 요동시킨다.The
록해제레버(43)는 요동함으로써 그 타단(43b)이 제8도의 상방향으로 이동하고, 카세트 장진에 의해서 당해 타단(43b)에 걸어맞춤이 가능한 위치까지 가져오게 된 제1레버(4)의 선단부를 밀어올리므로서 제1레버(4)의 클릭(4a)과 제2레버(6)의 돌부(6a)와의 걸어맞춤을 해제한다. 이것에 의해 제2레버(6)는 우측 방향으로 이동하여 제6도에 표시한 바와같이 돌기(6c)가 요동아암(11)의 일단(11a)에 걸어맞춤으로써 요동아암(11)을 반시계 방향으로 요동시킨다. 이것에 의해서 카세트 호울더(16)는 카세트하아프(15)를 들어올린다. 또 카세트 하아프(15)의 상승시 록아암(13)은 우방향으로 이동하는 제2레버(6)의 돌부(6b)에 의해서 그 하단부(13a)가 압압되므로서 반시계 방향으로 요동하며 제7도에 표시한 바와같이 카세트 하아프(15)의 상승이 완료한 시점에서 카세트 압압레버(2)의 절곡부(2b)의 고정을 해제한다. 따라서 카세트 압압레버(2)는 우방향으로 이동한 카세트 하아프(15)를 이젝트한다. 이 이젝트시에 있어서 카세트 하아프(15)의 들어올림 및 이젝트에 필요로 하는 힘은 장전시에 잡아늘린 스프링(5) 및(9)에 의하여 주어진다.The unlocking
제10도는 본 발명에 의한 카세트 데크에 있어서 리일유니트 구동기구를 표시하고 있다.10 shows a real unit drive mechanism in the cassette deck according to the present invention.
제10도에서 모우터(50)의 회전축(51)에 결합된 풀리(52)와 플라이휘일(53)과의 사이에 벨트(54)가 가설되어 있다. 또한 플라이휘일(53)이 중심축 캡스턴(55)이다. 플라이휘일(53)과 동축 또한 일체로 기어(56)가 설치되어 있다. 기어(56)에는 제12도에 표시한 바와같이 샤시(17)에 대하여 캡스턴(55)의 주위에 요동이 가능하게 또한 스프링(58)에 의하여 반시계 방향으로 부세된 아이들러 아암(57)에 회전자유롭게 추지된 아이들러기어(59)가 맞물려 있으며 이 아이들러기어(59)는 플레이상태일 때 권취측 리일유니트(60)와 일체적으로 구성된 리일구동기어(61)에 맞물리도록 되어 있다. 리일유니트(60)에는 리일구동기어(61)와 소정의 마찰부재를 통하여 걸어맞춘 센싱해제아암(62)이 설치되어 있다.In FIG. 10, the
공급측 리일유니트(63)에는 예컨대 2개의 걸림크릭(64a,64b)이 설치되어 있다. 샤시(17)에 설치된 핀(65)에 의해서 요동이 자유롭게 추지된 래치 아암(66)은 스프링(67)에 의해서 도면의 시계방향으로 부세되어 일단(66a)에서 걸림그릭(64a,6 4b)와 걸어맞춤할 수 있도록 설치되어서 래치 기구를 구성한다. 래치아암(66)의 타단(66b)은 플레이 상태으로의 이행시, 헤드대(68)의 전진위치로의 이동에 의해서 헤드대(68)의 돌기(68a)에 의해서 압압이 되어 반시계방향으로 회동시키므로서 래처 기구를 해제하도록 되어 있다.The supply
리미터기어(69)는 제12도에서 명백한 바와같이 축(70)에 의해서 샤시(17)에 요동자유로이 추지된 리미터아암(71)에 회전이 자유로이 추지되어서 헤드대(68)가 후퇴위치에 있을때에는 리미트아암(71)을 도면이 시계방향으로 부세하는 스프링(72)에 의해서 상기 플라이 휘일기어(53)에 맞물리도록 되어 있다. 이때 헤드대(68)의 각공단부(68c)에 아이들러아암(57)의 핀(57a)이 걸어맞춤이 되어 아이들러아암(57)이 도면의 시계방향으로 요동하므로 아이들러아암(59)는 리일구동기어(61)에 맞물리지 않는다. 그리고 헤드대(68)가 전진위치에 이동하며 플레이 상태로 이행하면 헤드대(68)의 부쉬(68b)가 리미터아암(71)을 도면의 시계방향으로 요동시켜서, 플라이휘일기어(53)와 리미터기어(69)와의 맞물림을 해제시키며 한편 헤드대(68)의 각공단부(68c)와 아이들러아암(57)의 핀(57a)와의 걸어맞춤이 해제되므로 아이들러기어(59)가 리일구동기어(61)에 맞물려서 리일유니트(60)를 정속 구동한다.When the
리미터기어(69)에는 축(73)에 의해서 회전이 자유로이 추지된 아이들러기어(74)가 맞물려 있다. 아이들러기어(74)의 축(73)은 제11도에서 명백한 바와같이 아이들러레버(75)에 고착되어서 샤시(17)에 천설된 장공(76)에 따라서 직선적으로 이동이 가능하게 구성이 되어 있다. 아이들러레버(75)가 스프링(77)에 의해서 도면의 상방향으로 부세되어 있으므로, 아이들러기어(74)는 통상 FF 기어(78)를 통하여 권취측의 리일구동기어(61)를 구동한다(FF).The
한편 후술하는 REW 조작에 관련하여 절환레버(79)가 제11도에 표시한 바와같이 아이들러레버(75)를 스프링(77)에 버티면서 하방향으로 이동시키므로서 아이들러기어(74)는 공급측의 기일구동기어(80)와 맞물려서 이것을 구동한다(REW).On the other hand, in connection with the REW operation described later, as shown in FIG. 11, the switching
또 다시 제10도에서 샤시(17)에는 캠기어(81)가 축(82)에 의해서 회전이 자유로이 추지되어 있으며 이 캠기어(81)에는 모우터(50)의 구동 토오크가 3개의 기어(83a,83b,83c)를 경유하여 전달된다. 이 캠기어(81)의 캠(81a)에 적합하게 걸어맞춤이 가능한 클릭(84a)을 가지는 센싱아암(84)이 제13도에 표시한 바와 같이 센싱동력레버(85)에 대하여 축(86)에 의해서 요동이 자유로이 추지되어 있다.In FIG. 10, the cam 17 is freely rotated by the
한편 캠기어(81)와 동축에 T형 아암(87)이 요동자유로이 추지되어서 이 T형 아암(87)은 하단 장공(87a) 에서 상술한 센싱 해제아암(62)의 핀(62a)에 걸어맞추어져 있다. 리일유니트(60)가 회전하고 있을 때에는 그 회전방향에 응하여 센싱해제아암(62)이 우 또는 좌방향으로 요동하여 센싱아암(84)을 제13도의 반시계방향으로 요동시켜 그 클릭(84a)을 캠기어(81)의 캠(81a)과 걸어맞춤이 가능한 위치로 퇴피시킨다.On the other hand, the T-shaped
리일 유니트(60)의 회전이 정지하면 센싱해제아암(62)이 요동하지 않으므로 센싱아암(84)의 클릭(84a)이 캠기어(81)의 외주내벽의 작용에 의해서 캠(81a)과 걸어맞춤이 가능한 위치에 가져와서 캠기어(81)의 회전 토오크에 의해서 센싱아암(84)이 제13도의 좌방향으로 이동시킨다. 센싱아암(84)과 센싱동력레버(81)와는 축(86)을 통하여 결합되어 있으므로 센싱동력레버(85)도 센싱아암(84)과 일체로 스프링(88)의 탄성력에 버티면서 이동한다. 센싱아암(84)의 클릭(84a)과 캠기어(81)의 캠(81a)과의 걸어맞춤이 벗어나면 스프링(88)의 복원력에 의해서 원위치에 복귀한다.When the rotation of the
또 제14도에 표시한 바와같이 T형 아암(87)과 동축으로 리세트 아암(89)이 요동자유로이 설치되며 또한 스프링(90)에 의해 도면의 시계방향으로 부세되어 있다. 이 리세트 아암(89)의 일단경사부(89a)는 통상 제1도에 표시한 바와같이 카세트 하아프의 장전측에 돌출되어 있으며, 삽입된 카세트 하아프가 강하하는 때에 이 카세트 하아프에 의해서 도면의 반시계방향으로 요동시켜서 카세트 하아프가 이젝트되면 스프링(90)의 부세력에 의해서 제14도의 시계방향으로 요동하여 그의 타단(89b)에서 센싱아암(84)을 도면의 반시계방향으로 요동시킨다.As shown in FIG. 14, the
이것에 의하면 센싱아암(84)의 클릭(84a)과 캠기어(81)의 캠(81a)과의 걸어맞춤이 벗어나기 직전에 후술하는 자동 이젝트 동작이 완료하여 모우터(50)가 정지하여도 리세트아암(89)의 작용에 의해서 센싱아암(84)의 클릭(84a)과 캠기어(81)의 캠(81a)과의 걸어맞춤을 확실하게 해제할 수 있기 때문에 다음의 카세트 장정 동작에 지장을 가져오는 일은 없다.According to this, the automatic ejection operation described below is completed immediately before the engagement between the click 84a of the
제1도에 있어서 선별레버(42)와 센싱동력레버(85)는 서로 병렬로 설치되어 서로 단독으로 그렇지 않으면 일체로 도면의 아래 방향으로 접동할 수 있는 구성으로 되어 있다.In FIG. 1, the
또 선별레버(42)는 록해제레버(43)의 일단(43a)을 작용점으로 하고 있는 동시에 당해 일단(43a)을 지점으로 하여 스프링(41)의 부세력에 버티면서 센싱동력레버(85)와의 걸어맞춤위치와 비 걸어맞춤위치와의 사이에서 요동가능하며 그의 오목부(42a)와 센싱동력레버(85)의 절곡부(85a)와의 걸거나 벗겨짐을 선택적으로 하도록 되어 있다. 헤드대(68)가 전진위치에 있는 플레이 상태에 있어서는 제15도에 표시한 바와같이 선별레버(42)의 오목부(42a)와 센싱 동력레버(85)의 절곡부(85a)와는 걸어맞춤상태에 있으며 테이프 종단으로 되어서 제13도에 있어서 설명한 센싱 동작에 의해서 센싱동력레버(85)가 제1도의 하방향으로 이동할때 선별레버(42)도 일체로 이동하므로서 이것에 의해서 록해제레버(43)가 수동이젝트 동작시와 마찬가지로 선별레버(42)에 의하여 구동이되므로 테이프 종단에서 자동적으로 이젝트 동작이 행하여지는 것이 된다.In addition, the
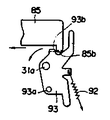
한편 제16도에 표시한 바와같이 FF 또는 REW 시에는 FF 테버(28) 또는 REW 레버(29)가 그 선단에서 선별레버(42)의 입상부(42b)를 압압하여 선별레버(42)를 요동시키며 선별레버(42)의 오목부(42a)와 센싱동력레버(85)의 절곡부(85a)와의 걸어맞춤이 해제되어 있으므로 센싱동작에 의해서 센싱동력에 레버(85)가 이동하여도 선별레버(42)는 이동하지 않고 이젝트 동작은 행하여지지 않는다. 또한 제17도에 표시한 바와같이 축(31a)에 의해서 요동자유로이 추지되며 또한 스프링(92)에 의해서 도면의 시계방향으로 부세된 록아암(93)이 설치되어 있으며 이 록아암(93)의 록핀(93a)에 의해서 제20도 또는 제21도에 표시한 바와같이 FF 레버(28) 또는 REW 레버(29)가 압압된 상태에 고정이 되어 있으며 센싱동력레버(85)가 이동할때 그 압하부(85b)가 록아암(93)의 입하부(93b)를 압압하여 록아암(93)을 제16도의 반시계방향으로 요동시키므로서 FF레버(28) 또는 REW레버(29)의 고정이 해제된다.On the other hand, as shown in FIG. 16, in the case of FF or REW, the
또 헤드대(68)가 후퇴위치에 있을때에는 제16도에 표시한 바와같이 핀치로울러 유니트(91)가 축(31a)을 중심으로 도면의 반시계방향으로 회동하여 그 단부(91a)에서 선별레버(42)의 입하부(42c)를 압압하여 선별레버(42)를 요동시키므로서 FF 또는 REW시와 같이 이젝트 동작은 행하여지지 않는다. 이제 센싱 동력레버(85)만이 이동을 하면 제18도에 표시한 바와같이 축(31a)에 의해서 요동이 자유로이 추지되며 또한 스프링(94)에 의해서 도면의 시계방향으로 부세되어 그 단부(95a)에서 헤드대(68)의 절곡부(680)에 걸어맞춤되므로서 헤드내(68)를 후퇴위치에 고정되어 있던 록아암(95)이 센싱동력레버(85)의 입하부(85b)에 의해서 제19도에 표시된 바와같이 도면의 반시계방향으로 요동이 되므로 헤드대(68)의 고정이 해제된다. 제18도에서 헤드대(68)는 구성(68e)에서 핀치로울러 유니트(91)의 핀(91b)와 걸어맞춤이 되어있고 헤드대(68)의 고정이 해제되므로서 핀치로울러 유니트(91)와 샤시(17)와의 사이에 장설된 스프링(96)에 의해서 헤드대(68)에 전진력이 부여된다. 또 헤드대(68)는 그 선단입상부(68f)에서 샤시(17)에 축(97)을 통하여 요동자유로이 추지된 아암(98)에도 걸어맞춤이 되어있고 아암(98)을 도면의 시계방향으로 걸어맞춤이 되어있고 아암(98)을 도면의 시계방향으로 부세하는 스프링(99)에 의하여도 전진력이 부여되어 화살표시 방향으로 이동한다. 헤드대(68)의 전진과 동시에 핀치로울러 유니트(91)가 도면의 시계방향으로 요동하여 핀치로울러(100)가 전진한다. 이젝트시는 제9도에 표시한 바와같이 스프링(102)의 부세력에 의해 복귀하는 레버(101)에 의해서 아암(98)이 반시계방향으로 회동시키므로서 헤드대(68)는 후퇴하여 핀치로울러(100)도 동시에 후퇴하여 당초의 상태로 복귀되며 록아암(95)에 의해서 후퇴위치에 고정이 된다.When the
다음에 빨리 보내기(FF) 및 감아되감기(REW)동작에 대하여 설명을 한다.Next, the fast forward (FF) and rewind (REW) operations will be described.
카세트가 장전되어서 테이프 데크가 플레이 동작중에 제20도에 표시한 바와같이 FF 레버(28)가 압압조작이 되면 FF 레버(28)의 돌기(28a)가 록아암(93)의 록핀(93a)에 걸어 맛춤이 되어서 FF 레버(28)가 작동위치에 고정되는 동시에 캠부(28b)가 헤드대(68)에 고정이 되어 헤드대 핀(102)을 도면의 우측방향으로 아암하므로 헤드대(68)는 조금 후퇴한다. 그리고 핀치로울러(100)가 후퇴하여 캡스턴(55)으로의 압접상태가 해제되는 동시에 헤드(25)가 테이프에 가볍게 접촉하는 상태로 된다. 이때 제12도에 표시한 바와같이 헤드대(68)의 각 공단부(68c)에 의해서 아이들러아암(57)의 핀(57a)이 도면의 하방에 밀어내려져서 아이들러아암(57)이 도면의 시계방향으로 회동이 되어 리일 구동기어(61)와 아이들러기어(59)와의 맞물림이 해제된다.When the cassette is loaded and the tape deck is in play, as shown in FIG. 20, when the
한편 동시에 헤드대 부쉬(68b)와 리미터아암(71)과의 걸어맞춤이 해제되므로 스프링(72)의 부세력에 의해서 리미터아암(71)이 도면의 시계방향으로 요동하여 리미터기어(69)가 플라이휘일기어(53)와 맞물려서 고속회전 토오크가 플라이휘일기어(53)로부터 리미터리어(69) 아이들러기어(74)및 FF기어(78)를 통하여 리일구동기어(61)에 공급이 된다.At the same time, since the engagement between the head-to-
이와같이 하여서 테이프 데크가 빨리 보내는 동작을 하는 것이다. 빨리 보내는 동작을 정지할 경우에 제19도의 상태에서 REW레버(29)를 가볍게 압압조작을 하면 REW레버(29)의 돌기(29a)가 록핀(93a)을 도면의 우방향에 근소하게 압압하므로 FF레버(28)의 돌기(28a)와 록핀(93a)과의 걸어맞춤이 벗겨져서 FF레버(28)가 스프링(39)의 탄발력에 의해서 복구하여 카세트 데크는 당초의 플레이 상태로 복귀된다. 또 빨리 보내는 동작중에 테이프종료 상태가 생기면 상기한 리일 유니트 회전정지 센싱기구(제13도 참조)가 작동하여 이것에 의해서 제18도에서 설명한 바와같이 센싱동력레버(85)의 이동에 따라서 FF레버(28)의 고정이 해제되는 동시에 헤드대(68)가 전진하여 플레이상테로 복귀된다. 다음에 되감긴 동작을 행하는 경우에는 REW레버(29)를 강하게 압압조작을 하면 REW레버(29)는 제21도와 같이 REW레버(29)의 돌기(29a)가 록핀(93a)에 걸어맞춤하므로서 작동위치에 고정이 된다. 그러면 FF때와 마찬가지로 캠부(29b)에 의하여 헤드대 핀(102)이 화살표시 방향으로 압압이 되므로 헤드대(68)가 후퇴하여 아이들러기어(59)와 리일구동기어(61)와의 맞물림이 해제된다. 동시에 제11도에 표시한 바와같이 REW레버(29)의 압압조작에 관련하여 제2아암(37)이 핀(38)을 중심으로 도면의 시계방향으로 요동하여 이것에 의해서 제2아암(37)에 핀(79a)을 통하여 걸어맞춤한 절환레버(79)가 도면의 화살표시방향으로 이동하여, 아이들러레버(79)를 도면의 하방향으로 이동시키므로 아이들러기어(74)가 장공(76)에 따라서 직선적으로 이동하여 리일구동기어(80)에 맞물려서 고속회전 토오크가 플라이 휘일기어(53)로부터 리미터기어(69)및 아이들러기어(74)를 통하여 구동리일 구동기어(80)에 공급되어 되돌려 감는 동작이 행하여진다.In this way, the tape deck sends quickly. In the state of FIG. 19, when the quick sending operation is stopped, if the
이상 설명한 바와같이 본 발명에 의한 이젝트기구의 기동기구에 의하면 왕복 동작이 자유로이 설치된 그 왕복로에서 이젝트 기구의 기동을 담당하는 동력레버에 센싱아암을 회전이 가능하게 지지하여 리일유니트의 회전정지 때에 이 센싱아암이 리일유니트 구동모우터를 동력원으로 하는 회전 캠기구와 걸어맞춤함으로써 동력레버를 왕복동작시키며 또한 연주위치에 장진된 카세트 하아프 걸어맞춤이 가능하게 리세트 아암을 설치시 카세트 하아프가 이젝트된 때에는 그 리세트 아암에 의해서 그 센싱아암을 요동시켜서 그 회전 캠 기구와의 걸어맞춤을 강제적으로 해제하도록 구성하였으므로 이젝트 완료직후에 전원 오프로 되며 회전캠기구와 센싱아암과의 걸어맞춤이 해제되기 전에 모우터가 정지되는 일이 생겨도, 리세트 아암의 작용에 의해서 기구가 초기상태로 복귀할 수 있기 때문에 다음의 카세트장진동작에 하등의 지장을 가져오는 일은 없다.As described above, according to the starting mechanism of the ejection mechanism according to the present invention, the sensing arm is rotatably supported by a power lever that is responsible for starting the ejection mechanism in the reciprocating path in which the reciprocating motion is freely provided. The sensing arm engages with the rotary cam mechanism that uses the real unit drive motor as a power source to reciprocate the power lever, and the cassette half is ejected when the reset arm is installed to allow the cassette half to be engaged at the playing position. In this case, the sensing arm is rocked by the reset arm to force release of the engagement of the rotating cam mechanism. Therefore, the power is turned off immediately after completion of ejection, and the engagement of the rotating cam mechanism and the sensing arm is released. Even if a motor stops before, by the action of the reset arm Since the mechanism can be returned to the initial state, there is no disturbance in the next cassette holding operation.
Claims (1)
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP???58-187842 | 1983-10-07 | ||
| JP187842 | 1983-10-07 | ||
| JP58187842A JPS6080154A (en) | 1983-10-07 | 1983-10-07 | Starting method of ejection mechanism of cassette deck |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR850003037A KR850003037A (en) | 1985-05-28 |
| KR900004464B1 true KR900004464B1 (en) | 1990-06-28 |
Family
ID=16213180
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019840006185A KR900004464B1 (en) | 1983-10-07 | 1984-10-06 | Cassette eject mechanism for cassette deck |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPS6080154A (en) |
| KR (1) | KR900004464B1 (en) |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57141070A (en) * | 1981-02-20 | 1982-09-01 | Pioneer Electronic Corp | Starting mechanism for eject mechanism of cassette deck |
-
1983
- 1983-10-07 JP JP58187842A patent/JPS6080154A/en active Granted
-
1984
- 1984-10-06 KR KR1019840006185A patent/KR900004464B1/en not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| JPS6080154A (en) | 1985-05-08 |
| KR850003037A (en) | 1985-05-28 |
| JPH0376548B2 (en) | 1991-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR900004464B1 (en) | Cassette eject mechanism for cassette deck | |
| JPS60229265A (en) | Cassette type tape recorder | |
| KR0166349B1 (en) | Translation cam means | |
| US4491887A (en) | Mode selector of recording and/or reproducing apparatus | |
| US4519269A (en) | Transmission system in a cam mechanism | |
| KR900004463B1 (en) | Cassette eject mechanism for cassette deck | |
| JPH0743791Y2 (en) | Tape recorder device | |
| JPS59191167A (en) | Cassette shifting device | |
| JP2657562B2 (en) | Eject device for tape player | |
| KR900004465B1 (en) | Cassette loading mechanism for cassette deck | |
| JPH07114047B2 (en) | Cassette type tape recorder | |
| JPS6144293Y2 (en) | ||
| US5031475A (en) | Power mechanism | |
| JPS6314416B2 (en) | ||
| JPH0339345B2 (en) | ||
| JPH0373948B2 (en) | ||
| JPS615470A (en) | Cassette tape recorder | |
| JPS60258755A (en) | Cassette tape recorder | |
| JPS615468A (en) | Cassette tape recorder | |
| JPH0142827Y2 (en) | ||
| JPH0250540B2 (en) | ||
| KR900000989B1 (en) | Cassette ejecting arrangement | |
| JPS60229267A (en) | Cassette type tape recorder | |
| JPH04209348A (en) | Tape player | |
| JPS624782B2 (en) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| G160 | Decision to publish patent application | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| LAPS | Lapse due to unpaid annual fee |