KR20220160669A - 유전체 엘라스토머 마이크로섬유 액추에이터 - Google Patents
유전체 엘라스토머 마이크로섬유 액추에이터 Download PDFInfo
- Publication number
- KR20220160669A KR20220160669A KR1020227037870A KR20227037870A KR20220160669A KR 20220160669 A KR20220160669 A KR 20220160669A KR 1020227037870 A KR1020227037870 A KR 1020227037870A KR 20227037870 A KR20227037870 A KR 20227037870A KR 20220160669 A KR20220160669 A KR 20220160669A
- Authority
- KR
- South Korea
- Prior art keywords
- microfiber
- bundle
- dema
- microfibers
- dielectric
- Prior art date
Links
- 229920001410 Microfiber Polymers 0.000 title claims abstract description 106
- 239000003658 microfiber Substances 0.000 title claims abstract description 106
- 229920002595 Dielectric elastomer Polymers 0.000 title abstract description 63
- 239000000835 fiber Substances 0.000 claims abstract description 108
- 239000000463 material Substances 0.000 claims description 60
- 230000001070 adhesive effect Effects 0.000 claims description 33
- 239000000853 adhesive Substances 0.000 claims description 32
- 239000012510 hollow fiber Substances 0.000 claims description 27
- 230000009969 flowable effect Effects 0.000 claims description 19
- 230000004913 activation Effects 0.000 claims description 16
- 239000013536 elastomeric material Substances 0.000 claims description 12
- 229920001296 polysiloxane Polymers 0.000 claims description 7
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 claims description 3
- 229920001651 Cyanoacrylate Polymers 0.000 claims description 2
- 238000004891 communication Methods 0.000 claims description 2
- 229920000647 polyepoxide Polymers 0.000 claims description 2
- 229920000728 polyester Polymers 0.000 claims description 2
- 229920001187 thermosetting polymer Polymers 0.000 claims description 2
- 239000007767 bonding agent Substances 0.000 claims 2
- MWCLLHOVUTZFKS-UHFFFAOYSA-N Methyl cyanoacrylate Chemical compound COC(=O)C(=C)C#N MWCLLHOVUTZFKS-UHFFFAOYSA-N 0.000 claims 1
- 229920006311 Urethane elastomer Polymers 0.000 claims 1
- 239000003822 epoxy resin Substances 0.000 claims 1
- 229920001169 thermoplastic Polymers 0.000 claims 1
- 239000004416 thermosoftening plastic Substances 0.000 claims 1
- 239000002184 metal Substances 0.000 abstract description 14
- 238000000034 method Methods 0.000 abstract description 13
- 238000004519 manufacturing process Methods 0.000 abstract 1
- QZIQJVCYUQZDIR-UHFFFAOYSA-N mechlorethamine hydrochloride Chemical compound Cl.ClCCN(C)CCCl QZIQJVCYUQZDIR-UHFFFAOYSA-N 0.000 abstract 1
- 239000010408 film Substances 0.000 description 13
- 230000004044 response Effects 0.000 description 12
- 239000007772 electrode material Substances 0.000 description 11
- 239000012530 fluid Substances 0.000 description 10
- 238000013461 design Methods 0.000 description 8
- 210000003205 muscle Anatomy 0.000 description 8
- 230000015556 catabolic process Effects 0.000 description 7
- 239000004020 conductor Substances 0.000 description 7
- 239000003990 capacitor Substances 0.000 description 5
- 235000009508 confectionery Nutrition 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 5
- 239000012212 insulator Substances 0.000 description 5
- 230000033001 locomotion Effects 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 150000001875 compounds Chemical class 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 4
- 239000000126 substance Substances 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 239000000806 elastomer Substances 0.000 description 3
- 239000002657 fibrous material Substances 0.000 description 3
- 238000010191 image analysis Methods 0.000 description 3
- 239000007943 implant Substances 0.000 description 3
- 230000003993 interaction Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000005457 optimization Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 239000010409 thin film Substances 0.000 description 3
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 2
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000012512 characterization method Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000000945 filler Substances 0.000 description 2
- 239000004519 grease Substances 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000003754 machining Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 229920002379 silicone rubber Polymers 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 241000408659 Darpa Species 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 229920004482 WACKER® Polymers 0.000 description 1
- 230000002730 additional effect Effects 0.000 description 1
- 239000002313 adhesive film Substances 0.000 description 1
- 239000003570 air Substances 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 239000013590 bulk material Substances 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000006229 carbon black Substances 0.000 description 1
- 239000002041 carbon nanotube Substances 0.000 description 1
- 229910021393 carbon nanotube Inorganic materials 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- NLCKLZIHJQEMCU-UHFFFAOYSA-N cyano prop-2-enoate Chemical class C=CC(=O)OC#N NLCKLZIHJQEMCU-UHFFFAOYSA-N 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 239000002019 doping agent Substances 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 239000012777 electrically insulating material Substances 0.000 description 1
- 239000003792 electrolyte Substances 0.000 description 1
- 125000003700 epoxy group Chemical group 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 229910021389 graphene Inorganic materials 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 239000000976 ink Substances 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 150000002500 ions Chemical class 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000001404 mediated effect Effects 0.000 description 1
- 230000003278 mimic effect Effects 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 229920000058 polyacrylate Polymers 0.000 description 1
- 238000004382 potting Methods 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 239000002243 precursor Substances 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 229920000260 silastic Polymers 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 229920002050 silicone resin Polymers 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 229920002725 thermoplastic elastomer Polymers 0.000 description 1
- 229920005992 thermoplastic resin Polymers 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/1075—Programme-controlled manipulators characterised by positioning means for manipulator elements with muscles or tendons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/123—Linear actuators
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/206—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using only longitudinal or thickness displacement, e.g. d33 or d31 type devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/60—Piezoelectric or electrostrictive devices having a coaxial cable structure
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/80—Constructional details
- H10N30/87—Electrodes or interconnections, e.g. leads or terminals
- H10N30/875—Further connection or lead arrangements, e.g. flexible wiring boards, terminal pins
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/80—Constructional details
- H10N30/87—Electrodes or interconnections, e.g. leads or terminals
- H10N30/877—Conductive materials
- H10N30/878—Conductive materials the principal material being non-metallic, e.g. oxide or carbon based
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Rheumatology (AREA)
- Micromachines (AREA)
- Actuator (AREA)
- Compositions Of Macromolecular Compounds (AREA)
Abstract
본 명세서에는, 각각의 마이크로섬유 면과 지지 요소 사이의 직접적인 기계적 연결, 및 모든 마이크로섬유의 코어와 금속 접점 사이의 직접적인 전기적 연결을 포함하는 유전체 엘라스토머 마이크로섬유의 번들 사이의 기계적 및 전기적 연결을 형성함으로써 DEMA를 제조하기 위한 방법 및 시스템이 개시되어 있다. 또한, 내부 전극, 중공 튜브, 및 외부 전극으로 구성되는 유전체 엘라스토머(DE) 마이크로섬유가 개시되어 있고, 외경과 내경 사이의 비율 알파는 액추에이터로서 그러한 섬유의 전기기계적 성능을 최대화한다.
Description
관련 출원에 대한 상호 참조
본 출원은 2020년 4월 2일자로 출원된 미국 가출원 제63/003,921호 및 2020년 4월 2일자로 출원된 미국 가출원 제63/003,922호에 대한 우선권의 이익을 주장하며, 각각의 개시내용은 모든 목적을 위해 그 전문이 본 명세서에 참조로 포함된다.
정부 권리
본 발명은 부분적으로 미국 DOI/DARPA가 수여한 계약 번호 제140D0420C0040호에 따른 정부 지원으로 이루어졌다. 정부는 발명에 대한 특정 권리를 가질 수 있다.
기술 분야
본 발명의 분야는 인공 근육 및 액추에이터이다. 본 발명의 분야는 또한 로봇 및 보형물이다.
고성능 로봇 액추에이터에 대한 필요성. 로봇 시스템은 보다 유능하고, 보다 안전하며, 비용 효율적으로 됨에 따라 중요한 사회-경제적 문제를 해결할 것이다. 이러한 문제를 해결하기 위해서는, 차세대 저비용의, 고기능 협력 로봇, 효과적인 외골격, 및 심리스 보형물이 요구된다. 이들 로봇 시스템의 대부분의 구성요소 - 센서, 계산, 알고리즘 또는 원격 조작, 연결성, 및 배터리 - 는 액추에이터라는 한가지 중요한 영역을 제외하고는 충분히 성숙하고 비용 효율적이다. 이들 용례에서는 로봇이 비주기적인 임의의 동작을 수행해야 하므로, 강력하고 빠르며, 충분히 정확하고, 제어 가능하면서도 작고 가벼운 액추에이터가 필요하다. 테더링되지 않은 용례의 경우, 효율성은 배터리 크기를 감소시키는 데 중요하다. 인간과의 안전한 상호 작용을 위해, 디바이스는 본질적으로 유연하고 가벼워야 하며, 보형물 및 군용 로봇의 경우 액추에이터는 조용해야 한다. 강렬한 노력에도 불구하고, 액추에이터는 임의의 상당한 혁신을 보이지 못했고 전자기 모터의 기본 원리에 의해 제한을 받는다.
지금까지, 로봇 공학에 이용 가능한 최고의 액추에이터는 전기 모터와 유압 구동 장치이지만, 이들은 복잡하며, 무겁고, 비효율적이며, 인간 상호 작용에 안전하지 않고, 비용이 많이 든다. 전기 모터는, 토크 밀도가 낮기 때문에, 저속에서 작동할 때 몹시도 비효율적이다 - 문제는 모터가 더 작을수록 악화된다. 유압 액추에이터는 토크 밀도가 더 높지만, 밸브, 펌프, 및 액세서리의 질량은 시스템 전체의 토크 밀도를 제한한다. 고도의 기어드 모터 및 밸브 제어식 유압 액추에이터는 높은 기계적 임피던스를 겪는다(즉, 높은 출력 마찰, 강성, 및 큰 반사 관성을 가짐). 이들 특성은 일반적으로 문제가 있지만, 인간과 상호 작용하도록 설계된 로봇의 경우에는 훨씬 더 문제가 되고, 여기서 사지의 가벼움과 수동적 역방향 구동력은 힘 매개 상호 작용에 바람직하고 안전에 중요하다. 가벼운 기어드 모터 또는 폐루프 힘 피드백 제어를 사용하여 관절 임피던스를 감소시킬 수 있지만, 토크 밀도가 낮기 때문에, 모터가 너무 무거워 원위 관절 내부에 배치할 수 없는 경우가 많다. 대신에, 사지 관성을 감소시키기 위해, 모터를 로봇 본체 내부에 배치하고 트랜스미션을 통해 원위 관절에 연결할 수 있지만, 다중 링크 관절식 케이블 드라이브는 설계 복잡성, 비용 및 중량을 증가시키고, 보우든 케이블(Bowden cable)(예를 들어, 자전거 케이블 브레이크)는 높은 정적 마찰, 마모 및 비선형 거동을 겪는다. 저마찰 선형 실린더 또는 가역 로터리 유체 펌프가 있는 정수압 구성의 유체 액추에이터를 사용하는 것이 대안이지만, 이들은 누설을 방지하고 입력-출력 동기화를 유지하기 위해 폐루프 제어를 필요로 하며, 요구되는 고압은 핀홀 누설에 심각한 위험을 제기한다. 전반적으로, 현재 구동 기술은 안전하고, 유능한 완전 자율 로봇 및 보형물을 개발하는 데 있어 병목 현상이다. 따라서, 전기 모터 및 유압 구동 장치에 의존하지 않는 로봇 공학 및 기타 용례를 위한 구동 기술을 계속 개선할 필요가 있다. 개시된 발명은 이들 및 다른 중요한 요구에 관한 것이다.
유전체 엘라스토머 마이크로섬유(Dielectric Elastomer microfibers)는 일반 로봇 및 보형물 용례를 위해 저비용 고성능 액추에이터를 실현하는 유망한 후보이다. 동축 커패시터로서 구체화된 이러한 액추에이터는 유전체 엘라스토머 재료의 탁월한 전기기계적 특성을 활용하여 자연 근육의 성능과 매우 유사한 유용하고 확장 가능한 동작을 생성한다. 장력을 생성하는 능력을 통해, 그리고 자연 근육의 계층 구조를 모방함으로써, 유전체 엘라스토머 마이크로섬유 변환기는 로봇 및 보형물 시스템을 위한 진정한 "인공 근육"을 실현할 것을 약속한다.
유전체 엘라스토머(Dielectric Elastomer)(DE)는, 그 빠른 응답 시간(<0.1초), 높은 에너지 밀도, 큰 변형률 능력, 저렴한 비용, 무소음 작동, 및 긴 수명으로 인해 로봇 구동 문제를 해결할 수 있는 인공 근육을 만들기 위한 유망한 재료로서 2000년대 초반에 확인되었다. 지난 20년 동안, 연구는 평행판 커패시터를 형성하는 2개의 유연한 전극 사이에 끼워진 엘라스토머 필름 - 절연체로서 작용함 - 으로 구성된 DE 액추에이터에 주로 초점을 맞추었다(비교 도 1a). DE 필름에 기초한 액추에이터는 100% 초과의 구동 변형률을 달성할 수 있지만, 이들 재료는 높은 전기장을 필요로 하고 매우 얇은 필름을 만들기 어렵기 때문에, 이들 액추에이터는 통상적으로 높은 구동 전압(500-10,000V)을 필요로 하여 로봇 시스템으로의 통합을 복잡하게 만든다. DE 필름은 불순물이나 결함이 필름을 치명적인 고장(유전 파괴)에 취약하게 만들고 적층하기 어렵기 때문에 대형 액추에이터로 잘 확장되지 않는다. 많은 구성과 용례가 시도되었지만, DE 필름으로부터, 즉 인공 근육을 만들기 위한 실용적인 움직임을 추출하는 것은 불가능하였다.
DE 마이크로섬유 액추에이터(DE microfiber actuator)(DEMA)는 필름 기반 DE 액추에이터의 한계를 극복한다. 독자는 DEMA를 처음에 설명하는 선구적인 특허에 대해 US7834527을 참조하며, 그 전문은 본 명세서에 참조로 포함된다. 평행판 커패시터를 사용하는 대신에, DEMA는 복수의 섬유를 포함하는 동축 커패시터 설계를 구현한다(도 1b). 이들 섬유는 직경이 수 마이크로미터로 축소될 수 있으며 매우 저렴한 비용으로 생산된다. 직경이 작은 섬유를 사용하여 DEMA는 저전압(600V 미만)으로 작동할 수 있으며 자연 근육이 뼈를 잡아당기는 것처럼 로봇 관절을 구동하는 데 직접 사용될 수 있는 장력을 생성할 수 있다. 수천 개의 섬유를 함께 묶어서 신뢰성을 증가시키고 마침내 인공 근육으로서 DE 재료의 모든 잠재력을 실현할 수 있는 강력하고 확장 가능한 액추에이터를 생산할 수 있다.
DEMA는 로봇 공학을 위한 저비용 고성능 액추에이터를 제공하고 완전히 새로운 세대의 로봇을 가능하게 한다. 이들 액추에이터의 근육과 같은 성능으로 인해, 로봇은 이제 인간과 상호 작용하기에 매우 안전하고 유능하도록 설계될 수 있다. 로봇은 마침내 많은 공상 과학 소설에서 상상한 것처럼 공장 현장을 떠나 풍부한 새로운 용례에 사용될 수 있을 것이다. 그러나, 이제 상상이 현실이 된다. 트랜지스터가 IT 혁명을 가능하게 한 빌딩 블록이었던 것처럼, 실용적인 DE 마이크로섬유 액추에이터는 로봇 혁명을 가능하게 하고 우리가 알고 있는 문명을 변화시키는 빌딩 블록이다.
유전체 엘라스토머 마이크로섬유 액추에이터(DEMA)에 관한 주목할만한 특징은 많은 섬유를 함께 묶을 수 있으므로, 각각의 개별 섬유에 의해 생성된 힘을 함께 추가하여 매우 강력한 액추에이터를 생산할 수 있다는 것이다. 이를 실현하려면 개별 섬유가 전기적으로 연결되어 그 힘을 전달하기 위해 활성화되고 기계적으로 연결될 수 있어야 한다. 불행히도, 전기 및 기계적 연결을 형성하는 것은 물리적 및 재료 호환성 문제를 제시한다.
기계적 관점에서, 이전의 개시 및 실시예는, 번들 DEMA 내에서, 개별 섬유가 번들 밀봉부에서만 기계적으로 서로 부착되고 번들 밀봉부는 이어서 주연부에서만 캡에 부착되며, 캡은 그 다음 하중을 관심 시스템에 전달하는 것으로 고려되었다. 이는 많은 수의 번들 섬유와 증가하는 전체 단면적을 갖는 DEMA에 심각한 확장성 문제를 부과한다. 문제는 번들 밀봉부의 중심 영역 내의 섬유가 인접한 섬유를 통해 번들 밀봉부의 주연부를 가로질러 기계적 하중을 전달해야 한다는 것이다. 이는 에지를 향한 힘의 점진적인 축적으로 이어지고 번들 밀봉부의 중심을 향해 큰 변형을 생성한다. 이는 빔 굴곡 해석과 유사하지만 3D 탄성 표면으로 확장된다. 적절한 비유는 눈이 균일하게 적재될 때 트램펄린이 경험하는 변형일 것이다: 궁극적으로 모든 응력이 주연부로 전달되고 번들 밀봉부의 주연부를 향해 증가하는 전단 응력 집중이 있기 때문에 표면의 중심이 상당히 편향된다.
전기적 관점에서, 이전의 개시 및 실시예는, 번들 DEMA 내에서, 개별 섬유의 코어가 공통 공동을 채우는 공통 벌크 유동성 전도체를 통해 전기적으로 상호 연결되는 것으로 고려하였다. 기계적 하중으로 인한 비균일 변형을 고려해 볼 때(앞서 설명함), 이 공동은 그에 따라 변형되어야 하고 에지를 향해 더 얇은 영역을 생성해야 하므로 결과적으로 전도도가 더 저하된다. 전반적으로, 기계적 변형은 바람직하지 않은 비균일 전기 전도도를 초래한다. 따라서, 이러한 기술적 문제를 극복하기 위해 DEMA 설계 및 DEMA 재료를 계속 개선할 필요가 있다.
개시된 발명은 이들 및 다른 중요한 요구에 관한 것이다.
본 발명은 전기 전도성 접착 기재, 및 단일 벌크 접촉 매체를 통해 DEMA 번들에 있는 마이크로섬유 중 적어도 대부분, 바람직하게는 적어도 실질적으로 모두를 전기적으로 그리고 기계적으로 연결하는 이중 기능을 실현하기 위한 다른 방법을 제공하며, 이에 의해 이전 문제를 해결하고 상당한 수의 섬유로 DEMA를 가능하게 한다. 이 이중 기능 연결 접착제의 구현은 또한, 접착제가 전도성 코어 유동성 전극의 존재 하에 캡 재료에 DE 마이크로섬유 재료를 접합하기 때문에 재료 호환성 문제를 해결한다.
본 발명은 또한 각각의 마이크로섬유 면과 지지 요소 사이의 직접적인 기계적 연결, 및 대부분의, 적어도 실질적으로 모든, 또는 모든 마이크로섬유의 코어와 금속 또는 전도성 접점 사이의 직접적인 전기적 연결을 포함하는 유전체 엘라스토머 마이크로섬유의 번들 사이의 기계적 및 전기적 연결을 형성하기 위한 방법 및 시스템을 제공한다. 이들 연결은 접착 특성이 있는 벌크 재료를 통해 확립되며, 한 표면은 전도성 캡에 접합되고 다른 표면은 각각의 마이크로섬유의 환형 면에 접합된다. 이러한 방식으로, 전도성 캡과 섬유 에지 사이에 얇은 접착제 필름이 생성된다. 접착제는 번들 밀봉부와 전도성 접점 사이에 접합부를 추가로 확립할 수 있다. 동시에, 이 접착제는 전기 전도성을 가지며 전도성 접점과 섬유의 전도성 코어 사이에, 또한 얇은 필름을 통해 전도성 경로를 생성한다.
본 발명은 또한 유전체 엘라스토머 마이크로섬유 각각의 면(원통형 링 에지)과 지지 요소(단부 캡) 사이의 직접적인 기계적 연결; 및 모든 마이크로섬유의 코어와 금속 또는 전도성 접점 사이의 직접적인 전기적 연결을 포함하는, 복수의 유전체 엘라스토머 마이크로섬유의 번들을 전기기계적으로 연결하는 방법 및 시스템을 제공한다.
본 발명은 또한 다수의 유전체 엘라스토머 마이크로섬유의 면(주변 에지)과 지지 요소(단부 캡) 사이의 직접적인 기계적 연결; 및 모든 마이크로섬유의 코어와 금속 또는 전도성 접점 사이의 직접적인 전기적 연결을 포함하는, 복수의 유전체 엘라스토머 마이크로섬유의 번들을 전기기계적으로 연결하는 방법 및 시스템을 제공한다.
본 발명은 또한 외경 및 내경을 갖는 것을 특징으로 하는 중공 섬유 본체, 중공 섬유 본체의 내부에 배치된 내부 유연 전극, 및 중공 섬유 본체 외부에 배치된 외부 유연 전극을 포함하는 DE 마이크로섬유를 제공하고, 중공 섬유 본체의 내경에 대한 외경의 비율 알파는 액추에이터로서 DE 마이크로섬유의 전기기계적 성능을 최대화하기 위해 선택되는 중요한 설계 파라미터이다.
본 발명은 또한 내부 전극, 중공 튜브, 및 외부 전극으로 구성되는 유전체 엘라스토머(DE) 마이크로섬유를 제공하며, 중공 튜브의 외경과 내경 사이의 비율 알파는 액추에이터로서 그러한 섬유의 전기기계적 성능을 최대화한다. 비율 알파의 적절한 값은 바람직하게는 마이크로섬유의 기계적 에너지 출력을 최대화하도록 선택된다. 몇몇 실시예에서, 비율 알파는 유효 작업 밀도를 최대화하도록 선택된다. 다른 실시예에서, 비율 알파는 유효 비에너지를 최대화하도록 선택된다. 몇몇 실시예에서, 비율 알파는 기계적 전력 밀도를 최대화하도록 선택된다. 몇몇 실시예에서, 비율 알파는 기계적 비출력을 최대화하도록 선택된다. 다른 실시예에서, 비율 알파는 유효 변형률을 최대화하도록 선택된다. 다른 실시예에서, 비율 알파는 유효 응력을 최대화하도록 선택된다. 몇몇 실시예에서, 비율 알파는 약 1.1 내지 3의 값을 갖는다.
본 발명은, 특정 바람직한 실시예에서, 또한 외경 및 내경을 갖는 것을 특징으로 하는 중공 섬유 본체, 중공 섬유 본체의 내부에 배치된 내부 유연 전극, 및 중공 섬유 본체 외부에 배치된 외부 유연 전극을 포함하는 DE 마이크로섬유를 제공하고, 중공 섬유 본체의 외경과 내경 사이의 비율 알파는 액추에이터로서 DE 마이크로섬유의 전기기계적 성능을 최대화하도록 선택된다.
본 발명은 또한 내부 전극, 중공 튜브, 및 외부 전극으로 구성되는 유전체 엘라스토머(DE) 마이크로섬유를 제공하며, DE 섬유를 충전하는 데 필요한 전기적 RC 시간 상수는 약 1000 밀리초(ms) 미만, 바람직하게는 약 500 ms 미만, 더욱 바람직하게는 약 200 ms 미만이다. 몇몇 실시예에서, OD는 유전 파괴를 격리하고 목표 작동 전압에서 번들 내 1000개 섬유 중 1개 미만의 고장률을 초래하는 더 높은 저항률 코어를 구현하도록 감소된다. 몇몇 실시예에서, 코어의 저항률은 섬유가 200 미만의 전기적 시간 상수를 갖도록 가공된다. 다른 실시예에서, 코어의 스케일(OD), 비율 알파, 및 저항률은 섬유가 목표 시스템의 기계적 시간 상수와 일치하지만 더 낮지 않은 전기적 시간 상수를 갖도록 가공된다.
본 발명은 또한 내부 전극, 중공 튜브, 및 외부 전극으로 구성되는 유전체 엘라스토머(DE) 마이크로섬유를 제공하며, DE 마이크로섬유의 중공 섬유 본체는 다음의 엘라스토머 재료, 즉 실리콘, 열경화성 수지, 열가소성 수지; 우레탄; 폴리에스테르; 아크릴 및 (메트)아크릴 중 하나 이상으로 구성될 수 있다.
본 발명은 또한 내부 전극, 중공 튜브, 및 외부 전극으로 구성되는 유전체 엘라스토머(DE) 마이크로섬유를 제공하며, DE 마이크로섬유의 중공 섬유 본체는 약 100 kPa 내지 약 5,000 kPa, 바람직하게는 약 300 kPa 내지 약 2400 kPa, 또는 약 400 kPa 내지 약 2000 kPa, 보다 바람직하게는 약 500 kPa 내지 1500 kPa, 더욱 더 바람직하게는 약 600 kPa 내지 1200 kPa 범위의 영률을 갖는 것을 특징으로 하는 재료로 제조된다.
일반적인 설명 및 다음의 상세한 설명은 단지 예시적이고 설명적일 뿐이며 첨부된 청구범위에 한정된 바와 같이 본 발명을 제한하지 않는다. 본 발명의 다른 양태는 본 명세서에 제공된 바와 같은 본 발명의 상세한 설명을 고려하여 본 기술 분야의 숙련자에게 명백할 것이다.
요약 뿐만 아니라 다음의 상세한 설명은 첨부 도면과 함께 읽을 때 더 잘 이해된다. 본 발명을 예시할 목적으로, 본 발명의 예시적인 실시예가 도면에 도시되어 있다. 그러나, 본 발명은 개시된 특정 방법, 조성물 및 디바이스로 제한되지 않는다. 또한, 도면은 반드시 실척으로 작성된 것은 아니다. 도면에서:
도 1은 (a) 필름 기반 DE 액추에이터 대 (b) 섬유 기반 DE 액추에이터의 작동 원리를 예시하고;
도 2a는 본 발명에 따른 DEMA의 실시예를 예시하며; 도 2b는 본 발명에 따른 DEMA의 부분 분해도의 실시예를 예시하고; 도 2c는 본 발명에 따른 DEMA의 단면도의 실시예를 예시하며;
도 3은 본 발명에 따른 DEMA의 여러 실시예의 사진을 도시하고;
도 4는 유전체 엘라스토머 섬유 액추에이터의 섬유 기하형상 특성을 예시하며, 주요 특징과 설계 치수를 표시한다.
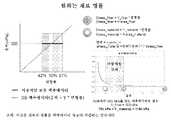
도 5는 본 발명에 따라 제조된 다양한 DEMA의 변형률-변형률 작동 특성을 예시하며, 다음의 데이터 곡선을 제공한다: a) 실리콘 엘라스토머 화합물로 제조되고 최대 유효 작업 밀도(회색 음영 영역)를 최대화하도록 설계된 DEMA에 대한 시뮬레이션된 응력 대 변형률 및 활성화 전압(V). b) DEMA 섬유의 변형률 대 응력 작동 공간에 대한 알파의 영향에 대한 예시. c) DEMA가 알파 = 1.9 둘레에서 스위트 스폿을 나타내는 알파(알파 = 섬유 OD/ID)의 함수로서 생성할 수 있는 유효 작업 밀도(단위 체적당 변형률에 따른 응력). d) 전기기계적 응답(변형률과 활성화 전압의 함수로서의 응력)을 입증하는 상업적으로 입수 가능한 실리콘 엘라스토머 재료로 제조된 DEMA로부터의 데이터;
도 6은 액추에이터 성능을 제어하기 위해 중공 실린더의 재료 파라미터 알파 및 영률이 어떻게 변경될 수 있는 지를 예시하고;
도 7a 및 도 7b는 2개의 상이한 DE 마이크로섬유인 샘플 A와 샘플 B 각각으로부터의 단면에 대한 일련의 마이크로 이미지를 제공하고; 도 7c 및 도 7d는 DE 섬유의 외경(OD) 및 내경(ID)을 측정하기 위한 단면 마이크로 이미지의 각각 샘플 A 및 샘플 B에 대한 이미지 분석 결과의 플롯을 제공하며;
도 8은 알파 = 2.05(정사각형) 및 알파 = 2.55(삼각형)를 특징으로 하는 상이한 크기의 DE 마이크로섬유로부터 제조된 DEMA에 대한 변형률(%) 대 활성화 전압(V)을 비교하는 데이터 플롯이고;
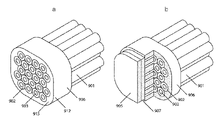
도 9a는 본 발명에 따라 제조된 DEMA의 실시예의 단면 사시도를 예시하고, 도 9b는 본 발명에 따라 제조된 DEMA의 실시예의 단면 사시도를 예시한다.
도 1은 (a) 필름 기반 DE 액추에이터 대 (b) 섬유 기반 DE 액추에이터의 작동 원리를 예시하고;
도 2a는 본 발명에 따른 DEMA의 실시예를 예시하며; 도 2b는 본 발명에 따른 DEMA의 부분 분해도의 실시예를 예시하고; 도 2c는 본 발명에 따른 DEMA의 단면도의 실시예를 예시하며;
도 3은 본 발명에 따른 DEMA의 여러 실시예의 사진을 도시하고;
도 4는 유전체 엘라스토머 섬유 액추에이터의 섬유 기하형상 특성을 예시하며, 주요 특징과 설계 치수를 표시한다.
도 5는 본 발명에 따라 제조된 다양한 DEMA의 변형률-변형률 작동 특성을 예시하며, 다음의 데이터 곡선을 제공한다: a) 실리콘 엘라스토머 화합물로 제조되고 최대 유효 작업 밀도(회색 음영 영역)를 최대화하도록 설계된 DEMA에 대한 시뮬레이션된 응력 대 변형률 및 활성화 전압(V). b) DEMA 섬유의 변형률 대 응력 작동 공간에 대한 알파의 영향에 대한 예시. c) DEMA가 알파 = 1.9 둘레에서 스위트 스폿을 나타내는 알파(알파 = 섬유 OD/ID)의 함수로서 생성할 수 있는 유효 작업 밀도(단위 체적당 변형률에 따른 응력). d) 전기기계적 응답(변형률과 활성화 전압의 함수로서의 응력)을 입증하는 상업적으로 입수 가능한 실리콘 엘라스토머 재료로 제조된 DEMA로부터의 데이터;
도 6은 액추에이터 성능을 제어하기 위해 중공 실린더의 재료 파라미터 알파 및 영률이 어떻게 변경될 수 있는 지를 예시하고;
도 7a 및 도 7b는 2개의 상이한 DE 마이크로섬유인 샘플 A와 샘플 B 각각으로부터의 단면에 대한 일련의 마이크로 이미지를 제공하고; 도 7c 및 도 7d는 DE 섬유의 외경(OD) 및 내경(ID)을 측정하기 위한 단면 마이크로 이미지의 각각 샘플 A 및 샘플 B에 대한 이미지 분석 결과의 플롯을 제공하며;
도 8은 알파 = 2.05(정사각형) 및 알파 = 2.55(삼각형)를 특징으로 하는 상이한 크기의 DE 마이크로섬유로부터 제조된 DEMA에 대한 변형률(%) 대 활성화 전압(V)을 비교하는 데이터 플롯이고;
도 9a는 본 발명에 따라 제조된 DEMA의 실시예의 단면 사시도를 예시하고, 도 9b는 본 발명에 따라 제조된 DEMA의 실시예의 단면 사시도를 예시한다.
본 발명은 본 개시내용의 일부를 형성하는 첨부 도면 및 예와 관련하여 취한 다음의 상세한 설명을 참조함으로써 보다 쉽게 이해될 수 있다. 본 발명은 본 명세서에 설명 및/또는 도시된 특정 디바이스, 방법, 용례, 조건 또는 파라미터로 제한되지 않으며, 본 명세서에 사용된 용어는 단지 예로서 특정 실시예를 설명하기 위한 것이고 청구된 발명을 제한하는 것으로 의도되지 않음을 이해하여야 한다. 또한, 첨부된 특허청구범위를 포함하는 명세서에서 사용될 때, 단수 형태는 복수 형태를 포함하고, 특정 수치 값에 대한 언급은 문맥상 명백하게 달리 지시하지 않는 한 적어도 해당 특정 값을 포함한다. 본 명세서에 사용될 때, 용어 "복수"는 둘 이상을 의미한다. 값들의 범위가 표현될 때, 또 다른 실시예는 하나의 특정 값으로부터 및/또는 다른 특정 값까지를 포함한다. 유사하게, 선행사 "약"의 사용에 의해 값이 근사치로서 표현될 때, 특정 값이 다른 실시예를 형성하는 것이 이해될 수 있을 것이다. 모든 범위는 경계값을 포함하고 조합 가능하다.
명료함을 위해, 본 명세서에서 별개의 실시예와 관련하여 설명된 본 발명의 특정 특징은 단일 실시예에서 조합하여 제공될 수도 있음이 이해된다. 반대로, 간결함을 위해, 단일 실시예와 관련하여 설명된 본 발명의 다양한 특징은 개별적으로 또는 임의의 하위 조합으로 제공될 수도 있다. 또한, 범위에 명시된 값에 대한 언급은 해당 범위 내의 어느 값이나 포함한다.
용어
본 명세서에 사용될 때, "섬유" 및 "마이크로섬유"라는 용어는 상호 교환 가능하게 사용된다.
본 명세서에 사용될 때, "DEMA", "섬유" 및 "마이크로섬유"라는 용어는 상호 교환 가능하게 사용된다.
도 1은 종래 기술인 (a) 필름 기반 DE 액추에이터 및 (b) 섬유 기반 DE 액추에이터의 작동 원리를 예시한다. a) 필름 기반 DE 액추에이터의 작동 모드의 예시. 탄성 절연체 필름이 2개의 유연 전극 사이에 끼워져 있다. 절연체는 통상적으로 프레임을 사용하여 미리 변형된다. 전압이 인가된 경우, 전극이 충전되고, 쿨롱의 힘은 절연체를 압착하여 절연체가 평탄하게 되게 하고 필름이 2차원으로 신장되게 한다. b) 섬유 기반 DE 액추에이터의 작동 모드의 예시. 탄성 절연체 중공 섬유는 유동성 전극(양극)으로 채워지고 음극에 의해 둘러싸여 있다. 전압이 인가되면, 전극이 충전되고, 쿨롱의 힘이 섬유를 반경방향으로 압착하여 길이가 증가되게 한다. 전압이 제거되면, 엘라스토머의 탄성 특성은 외부 하중을 이동시킬 수 있는 필름 - 및 섬유 - 기반 DE 액추에이터에 장력을 생성한다. 다른 실시예에서, 내부 유동성 전극은 음극일 수 있고, 마이크로섬유는 양극에 의해 둘러싸일 수 있다. 유동성 전극은 탄성력을 나타내지 않기 때문에 이점을 제공하지만 다른 유연 전극이 사용될 수 있다. 다른 실시예에서, 내부 유연 전극은 내부 표면에만 적용될 수 있다.
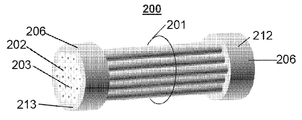
도 2a를 참조하면, DEMA(200)는 섬유 어레이(201)를 포함하며, 섬유 어레이는 각각의 원위 단부에서 충전 재료 또는 포팅 재료로부터 번들 밀봉부(206)를 형성함으로써 제조되는 복수의 DE 마이크로섬유(202)를 포함하고, 이러한 충전 재료는 DE 마이크로섬유(202)를 제조하는 재료와 동일하거나 DE 마이크로섬유의 내부 섬유 코어(203)를 그 외부 표면으로부터 격리시키는 상이한 재료일 수 있다. 각각의 번들 밀봉부(206)는 주연부(212) 및 면(213)을 갖는 것으로 도시되어 있다. 번들 밀봉부(206)의 면(213)은 섬유(202) 및 섬유 코어(203)의 원위 단부를 지칭한다. 번들 밀봉부는 모든 섬유를 함께 접착하고 외장(또는 중간 섹션)으로부터 단부(코어)를 분리하는 번들의 일부이다.
도 2b를 참조하면, DEMA(200)는 섬유 어레이(201) 및 번들 밀봉부(203)를 둘러싸는 캡슐화 슬리브(204)를 갖는 것으로 도시되어 있다. 2개의 절연 캡(211)(내부의 섬유 어레이를 예시하기 위해 제거된 상태로 도시됨)이 DEMA의 원위 단부에 제공되며, 각각은 전기기계적 접점(205)을 갖는다. 절연 캡(211)은 전기기계적 접점(205)을 덮고 전기적으로 절연하는 전기 절연 재료로 제조될 수 있다.
도 2c는 섬유 코어(203)를 드러내기 위해 단면으로 복수의 DE 마이크로섬유(202)를 예시하는 DEMA(200)의 길이방향 단면도를 제공하며, 섬유 코어는 복수의 DE 마이크로섬유(202) 및 번들 밀봉부(206)를 각각의 단부에서 전기기계적 접점(205)에 기계적으로 접합하고 전기적으로 연결하기 위해 각각의 원위 단부에 제공된 전기 전도성 접착제(207)와 전기 통신되도록 유연한 전도성 전극 재료로 채워진다. 전기 전도성 접착제(207)는 DE 섬유(202)의 원위 단부의 면을 전기기계적 접점(205)에 기계적으로 접착하고 섬유 코어(203)의 내부를 전기적으로 연결한다. 또한, DE 마이크로섬유(202) 각각의 외부를 둘러싸는 전도성 유체와 같은 유연한 전도성 재료 또는 매체로 제조된 유연 접지 전극(208)이 도시되어 있다. DE 마이크로섬유(202)는 중공(충전되지 않은 경우) 마이크로섬유의 원통형 벽, 및 따라서 전기 전도성 접착제(207)를 통해 전기기계적 접점(205)에 밀봉되는 마이크로섬유의 원위 단부면을 형성하는 엘라스토머 재료를 포함한다. 전기기계적 접점(205)은 통상적으로 전기 전도성이고 로봇 시스템과 같은 구동을 위해 설치된 시스템과 번들 섬유 사이의 기계적 및 전기적 커넥터의 역할을 하는 절연 캡(211)의 일부이다.
본 발명의 실시예에 따른 번들 밀봉부와 마이크로섬유 번들의 전기기계적 연결 설계의 실시예가 도 9a 및 도 9b에 추가로 예시되어 있다. 도 9a는 본 발명에 따라 제조된 DEMA의 일부의 실시예의 단면 사시도를 예시한다. 섬유 어레이(901)는 밀봉부용 측벽을 형성하는 주연부(912)를 포함하는 번들 밀봉부(906)에 의해 캡슐화된 것으로 도시되어 있다. 번들 밀봉부의 면(913)은 또한 섬유 어레이 내의 섬유의 원위 단부와 동일한 높이에 위치 설정된 것으로 도시되어 있으며, 원위 단부는 섬유 단부(902)의 면이 섬유 코어(903)를 둘러싸는 것으로 도시되어 있다. 작동 동안, 섬유 코어(903)는 적절한 전기 전도성 유체와 같은 유연 전극 재료로 채워지고, 섬유 어레이(901)는 또한 어레이(901)와 함께 섬유 각각의 외부에 바로 인접하게 위치 설정된 적절한 유연 전극 재료를 갖는다. 도 9b는 본 발명에 따라 제조된 DEMA의 실시예의 단면 사시도를 예시한다. 도 9b는 본 발명에 따라 제조된 DEMA의 일부의 실시예의 단면 사시도를 예시한다. DEMA는 도 9a의 것과 유사하지만, 전기기계적 접점(905)을 번들 밀봉부의 면 뿐만 아니라 말단 섬유 단부의 면에 전기기계적으로 접합하고 섬유 코어 내의 유연 전극 재료와 전기 전도도를 유지하도록 전기 전도성 접착제(907)의 층을 또한 포함한다.
전기 전도성 접착제 또는 화합물을 사용하여 적절한 기계적 및 전기적 연결을 달성할 수 있다. 예를 들어, 접착제는 유동성 전극의 존재 하에 마이크로섬유 재료에 직접 접합할 수 있는 전도성 접착제일 수 있다. 접착제는 또한 코어 전극이 비-유동성인 실시예에서 마이크로섬유 코어 전극에 접합될 수 있다. 접착제는 섬유 재료, 전도성 코어 전극 및 전도성 캡의 존재가 있을 때 접합부를 확립하기 위해 적절한 경화 특성 또는 화학 반응을 가져야 한다. 적절한 접착제는 전기 전도성을 만들기 위한 적절한 도펀트 또는 충전제와 함께 에폭시, 실리콘 및 시아노아크릴레이트를 포함한다. 전기적 연결은 마이크로섬유 코어와 전도성 접점 사이에 유동성 공동을 형성함으로써 달성될 수 있으며, 기계적 연결은 번들 밀봉부의 주연부에서 달성될 수 있다. 전도성 지지부는 마이크로섬유 번들의 코어와 정렬되는 핀 또는 접점의 어레이를 핀이 코어에 삽입되는 곳에 갖는다. 몇몇 실시예에서, 기계적 연결은 접착제에 의해 보강된다.
특정 실시예에서, 전기적 연결은 집적 회로와 유사한 접합 패드 링 및 접합 와이어에 의해 달성될 수 있다.
특정 실시예에서, 기계적 연결은 번들 밀봉부의 면 또는 주연부 상의 접착제에 의해 달성된다.
일 실시예에서, 전기 전도성인 특수 접착제 또는 접합 재료가 번들 밀봉부의 전체 개방 면을 덮도록 형상화된 금속 또는 전도성 접점에 적용되고, 이는 그 후, 번들 밀봉부의 개방 면에 접합된다. 이러한 방식으로, 접착제 또는 접합 재료는 금속 또는 전도성 접점과 섬유 코어, 섬유 본체와 번들 밀봉부 재료 사이에 중간 층을 생성한다. 이 방법을 통해, 금속 또는 전도성 접점은 모든 마이크로섬유 코어에 (전도성 접착제 또는 접합 재료를 통해) 전기적으로 연결되고 전하가 모든 섬유 코어 안팎으로 전달되게 한다. 이 방법을 통해, 모든 섬유의 본체와 번들 밀봉부 재료는 금속 접점에 기계적으로 연결되고 각각의 섬유와 금속 접점 사이에 힘(및 또는 응력 또는 장력)이 전달되게 하여 외부 하중에 대한 운동을 생성한다.
전기 전도성 접착제 또는 접합 재료는 다음과 같은 고유한 특성을 갖도록 선택되는 것이 바람직하다:
1. 접합 재료는 약 400 ohm cm 미만의 체적 저항률을 갖는 전기 전도성이다.
2. 접합 재료는 약 100 kPa보다 큰 인장 접합 강도를 발생시키기 위해 직접적으로 또는 프라이머 및 전처리제의 사용을 통해 섬유 재료, 예를 들어 실리콘 엘라스토머 재료에 접합될 수 있다.
3. 접합 재료는 유동성 전극의 존재 하에 경화될 수 있고, 그러한 전극은 물, 전도성 그리스, 이온성 유체 등으로 제조될 수 있다.
다른 실시예에서, 벌크 금속 접점을 사용하는 대신에, 섬유의 서브세트가 패턴의 일부에 연결되고 다른 서브세트로부터 격리될 수 있도록 패턴화된 연결성을 갖는 실리콘 인터포저 집적 회로 또는 미세 피치 PCB를 통해 연결이 이루어진다. 이 실시예에서, 접착제 또는 접합 재료는 측방향 전도도보다 훨씬 더 높은 축방향 전도도를 갖는 추가 특성을 갖거나, 대안적으로 이 접착제는 섬유 서브세트를 서로로부터 격리시키는 방식으로 패턴화될 수 있다.
다른 실시예에서, 접착제 또는 접합 재료를 사용하는 대신에, 이 체적은, 섬유 코어가 금속 또는 전도성 접점에 전기적으로 직접 연결되도록, 섬유와 동일한 전극으로 채워진 유동성 공동으로 구성된다. 이 실시예에서, 기계적 연결은 번들 밀봉부의 주연부에서(면이 아님), 또는 면과 주연부에 의해 정의된 에지 근방의 적절한 평탄한 링 접점을 통해 이루어진다. 기계적 연결은 접착제를 이용하여, 번들 밀봉부 재료의 직접 주조를 통해, 일부 다른 열적 또는 화학적 방법을 통해, 또는 기계적 클립 또는 관절을 통해 달성될 수 있다.
다른 실시예에서, 금속 또는 전도성 접점은 섬유와 정렬되고 전기적 연결을 확립하기 위해 코어에 삽입되는 일련의 핀(또는 바늘)을 갖는다. 이 실시예에서, 기계적 연결은 번들 밀봉부의 면 상의 접착제를 통해, 번들 밀봉부의 주연부 상의 연결을 통해, 또는 상기의 임의의 조합을 통해 섬유로의 핀의 간단한 마찰에 의해 이루어질 수 있다.
다른 실시예에서, 금속 연결은 접합 와이어가 부착될 수 있는 번들 밀봉면(6) 둘레에 있는 전기 접점 세트 및 섬유 코어(2)에 연결된 그러한 접합 와이어를 갖도록 형상화된다. 이 실시예는 주변 패드가 있는 표준 IC 패키지와 유사하다. 이 실시예에서, 기계적 연결은 전술한 방법 중 임의의 것에 의해 이루어질 수 있다.
DEMA는 아래의 실시예 섹션에서 추가로 설명된 바와 같이 준비되었다. 도 3은 전기 전도성 접착제 없이 섬유를 둘러싸도록 또는 코어 내부에 전도성 유체를 추가하기 전에 이루어진 여러 "건조" DEMA의 사진을 제공한다. "건조" DEMA(300)는 섬유 어레이(301)를 포함하는 것으로 도시되어 있으며, 섬유 어레이의 원위 단부는 번들 밀봉부(306)로 캡슐화되어 있다. 번들 밀봉부(306)는 번들 밀봉부의 면(313)에 개방 섬유 코어(303) 각각을 제공하기 위해 섬유(302)의 단부를 함께 유지한다.
고성능 액추에이터로서 DEMA의 가공. 유전체 엘라스토머 마이크로섬유 액추에이터(DEMA)는 일반적인 로봇 시스템의 요구를 해결하기 위해 기계적 및 전기적 특성의 정확한 균형을 제공하도록 가공될 수 있다. 특정 유전체 엘라스토머(DE) 재료(또는 블렌드)를 선택하고 DEMA의 기하형상과 스케일을 제어함으로써, 액추에이터의 에너지 밀도, 유효 변형률, 차단 및 유효 응력, 강성, 효율성, 응답 시간 및 로봇 용례에 적합한 다른 많은 중요한 특성을 설계할 수 있다. 여기서는 중요한 치수 중 몇 가지에 따라 구동 성능을 최대화하도록 설계된 DEMA에 대해 설명한다.
여기서 설명된 바와 같이, 변위와 힘의 척도 불변 측정을 사용할 것이다. 따라서, 주어진 DEMA의 길이 및 구동 변위 요구 사항을 설명하는 대신에, 변형률 = (길이/초기 길이) - 1로서 계산되는 변형률로 설명되는 DEMA의 상대 연신율을 사용한다. DEMA가 생성할 수 있는 힘을 설명하는 대신에, 응력 = 힘/단면적으로서 정의되는 응력을 고려한다. 단면적 = Pi * (OD/2)^2. 이러한 방식으로, 복수로 구성된 DEMA 액추에이터에 의해 생성된 힘은 고유 응력을 곱한 모든 섬유의 모든 단면적의 합에 의해 계산될 수 있다. 이러한 척도 불변 메트릭을 통해, 개별 섬유 및 대규모 통합 액추에이터의 고유 성능을 정량화할 수 있다. 또한, 개별 섬유에 대해 통합 액추에이터의 거시적 규모 최적화로 직접 변환되는 고유 최적화 방법을 설명할 수 있다.
DEMA의 전기기계적 성능은 그 재료의 전기기계적 특성과 그 기하형상의 조합에 의해 결정된다.
재료 관점에서, 마이크로섬유 본체를 특징으로 하는 주요 재료 특성은 탄성 계수(영률), 유전 상수 및 항복 전압이고; 전극 재료에 대해 주요 특성은 체적 전도도이다. DEMA 재료의 탄성 계수와 관련하여 스위트 스폿을 발견하였고, 여기서 재료는 약 600 kPA 내지 약 1200 kPa의 계수를 갖는다. 다른 특성과 관련하여, 재료는 가능한 한 많은 전하를 유지할 수 있도록 가능한 가장 높은 유전 상수와 가능한 가장 높은 유전 파괴 전압을 가져야 한다. 일부 다른 원하는 특성으로는 낮은 점성 손실, 낮은 유전체 손실, 낮은 히스테리시스, 낮은 온도 의존성, 크리프 없음, 및 높은 신뢰성이 있다.
DEMA의 기하형상과 관련하여, 임의의 주어진 재료에 대해, 섬유의 치수는 성능을 결정하는 데 기본적인 역할을 한다. 도 4를 참조하면, DEMA(400)는 섬유 본체 외측(외부) 직경(401)(OD), 섬유 본체 내경(402)(ID), 내경(402)에 대한 외경(401)의 비율, 알파=OD/ID, 및 길이(406)(L)를 특징으로 할 수 있다. 놀랍게도, 주어진 DE 재료에 대해, 알파 비율이 DEMA의 성능 메트릭을 제어하기 위한 중요한 규모 불변 설계 파라미터이며 특정 기계적 능력을 최대화하도록 선택될 수 있다는 것을 발견하였다. 놀랍게도 특정 DE 재료로 제조된 DEMA의 경우, 알파 선택이 최대 에너지 밀도, 유효 변형률, 차단 응력, 강성 및 효율성을 결정하며 최적의 알파는 상이한 DE 재료에 대해 약간 상이하다는 것을 발견하였다. 알파가 선택되면, 섬유의 외경에 의해 정의되는 섬유의 일반적인 스케일에 따라 작동 전압과 신뢰성이 결정되게 된다.
올바른 알파 값을 신중하게 가공함으로써, 비에너지라고도 공지된 단위 질량당 가장 기계적 일(힘 * 변위 또는 응력 * 변형률) 또는 대안적으로 에너지 밀도라고도 공지된 단위 체적당 가장 기계적 일을 생성하도록 설계된 DEMA를 생산할 수 있다. 이들 모두는 로봇 시스템을 위한 기본적인 액추에이터 성능 메트릭이다. 추가로, 알파는 적절하게 다른 메트릭을 제어하도록 가공될 수 있다.
도 5a는 시뮬레이션된 DEMA의 예상되는 전기기계적 거동을 도시하고, 도 5d는 초기 프로토타입의 측정된 결과를 도시한다. 이러한 수치를 생성하기 위한 프로토콜은 다음과 같다: 단일 DEMA가 특성화를 위해 전기기계 테스터에 장착되거나(도 5d) 시뮬레이션된 시스템이 계산된다(도 5a). 전기기계 테스터는 DEMA를 신장시킨 다음, 초기 길이로 복귀되며, 결과적인 장력을 기록한다. 전기기계 테스터는 신장 및 이완 사이클을 반복하고, DEMA의 전기기계 거동을 특성화하기 위해 각각의 사이클을 통해 상이한 활성화 전압을 인가한다. 이러한 특성화로 인해 측정된 DEMA의 힘 대 길이 및 활성화 전압이 초래된다. 도 5a는 제로 활성화 전압(Vo)과 최대 활성화 전압(Vmax)에 대한 DEMA 응답을 도시한다. 도 5d는 0(Vo)에서 최대 활성화 전압(점진적으로 어두운 원)에 이르는 여러 활성화 전압에 대한 DEMA 응답을 도시한다. 스케일 불변의 경우, 길이는 변형률(여기서 변형률 = 길이/초기_길이 - 1)로 변환되고 힘은 응력(여기서 응력 = 힘/초기 단면적)으로 변환된다.
DEMA가 생성할 수 있는 기계적 일은 도 5a 및 도 5d로부터의 데이터를 분석하여 계산될 수 있다. DEMA가 생성할 수 있는 최대 기계적 일은 제로 활성화 전압과 최대 활성화 전압의 곡선 내에서 작동 영역에 의해 결정된다. 이 영역을 정의할 수 있는 몇 가지 방법이 있으며, 그 모두가 본 발명에서 고려된다. 예를 들어, 도 5a는 작동 영역을 정의하기 위한 목표 파라미터로서 effective_stress 값이 선택되는 한 가지 방법을 예시한다. 이 effective_stress는 액추에이터가 목표 작업을 통해 생성할 수 있는 보장된 응력(또는 힘)을 정의한다. effective_stress에 기초하여, 제로 활성화가 선택될 때 이 응력을 생성하는 데 필요한 최소 사전 변형률 값이 선택된다. 최대 변형률 값은 DEMA가 최대 전압 활성화 하에 유효 응력을 생성할 수 있는 변형률 값으로 선택된다. 이 정의로부터, DEMA가 생성할 수 있는 최대 기계적 일은 최소와 최대 응력 사이 및 최소와 최대 변형률 사이에 정의된 영역이다.
도 5b는 알파 비율이 상이한 시뮬레이션된 DEMA의 전기기계적 거동을 예시한다. 알 수 있는 바와 같이, 낮은 알파 비율의 경우, DEMA의 단면에 엘라스토머가 거의 없기 때문에, DEMA의 응력-변형률 응답이 매우 얕아진다. 대안적으로, 높은 알파 값의 경우, 단면에 많은 엘라스토머가 있기 때문에, 응력-변형률 응답이 매우 가파르게 된다. 도 5b는 낮은 값과 높은 값의 알파에 대해 어떻게 작동 영역(모든 effective_stress에 대해)이 매우 좁아지고 DEMA가 생성할 수 있는 기계적 일이 감소되는 지를 도시한다. 그러나, 작동 영역이 최대인 스위트 스폿이 있다.
주어진 액추에이터가 생성할 수 있는 기계적 일을 계산(또는 측정)한 후, 상이한 재료로 제조된 DEMA 사이의 비교를 용이하게 하기 위해, 액추에이터의 기계적 일을 체적(work_density를 얻기 위해)에 의해 또는 질량(specific_energy를 얻기 위해)에 의해 나누는 것이 유용하다. 도 5c는 주어진 재료에 대해 어떻게 작업 밀도가 알파에 따라 달라지는 지, 그리고 DEMA의 성능을 최대화하는 최적의 알파 값이 어떻게 존재하는 지를 도시한다. 더욱이, 도 5c는 어떻게 알파=2 값 둘레에 좁은 피크가 있고 그 값으로부터 급격히 감소하는 지를 도시한다. 이와 같이, 이 범위 내에서 알파를 식별하고 선택하는 프로세스는 본 발명의 기본 구성요소이다.
특정 재료에 대한 알파 값을 신중하게 선택하여 성능 스위트 스폿에서 작동하는 DEMA를 가공할 수 있다. 예를 들어, 도 5c는 DEMA의 유효 작업 밀도가 선택된 알파 비율에 의해 어떻게 영향을 받는 지를 도시한다. 따라서, 적절한 DEMA는 약 1.2 내지 약 4, 바람직하게는 약 1.3 내지 약 3, 더욱 더 바람직하게는 약 1.5 내지 약 2.5, 훨씬 더 바람직하게는 약 1.7 내지 약 2.2, 가장 바람직하게는 약 1.8 내지 2.1의 알파 값을 갖는다.
그리고, OD를 신중하게 선택함으로써, 가능한 가장 낮은 작동 전압을 가지면서도 해당 용례에 대해 올바른 반응 시간을 갖는 섬유를 가공할 수 있다. 마지막으로, 섬유의 길이(6)에 의해 영향을 받는 주요 파라미터는 OD(1)의 스케일에 따라 달라지는 섬유의 전기 RC 시간 상수이다.
도 5a 및 도 5b는 제1 원칙으로부터 시뮬레이션된 DEMA의 작동 공간을 도시한다. 도 5a를 참조하면, 점선(Vo)은 0으로부터 140%까지 변형될 때 DEMA의 수동적 거동을 설명한다. DEMA가 신장됨에 따라, 섬유 재료(4)의 탄성 특성으로 인해, 섬유는 탄성 요소와 같은 응력을 생성한다. 섬유(5)의 코어(3)와 외부 표면 사이에 전압이 인가되면, 섬유(3, 4, 5)에 의해 형성된 동축 커패시터에 축적된 전하는 섬유를 반경방향으로 압착하여 장력을 감소시키는 정전기 응력(또는 맥스웰 응력)을 생성한다. Vo 라인과 평행한 블랙 라인이 이를 예시한다. 점선 Vmax는 재료가 유전 파괴에 도달하기 전에 가능한 최대 작동 전압(안전 계수 포함)에서 섬유의 응력 대 변형률 거동을 예시한다. 전반적으로, 임의의 주어진 변형률에서 DEMA에 특정 전압을 인가함으로써, 로봇 시스템 설계자는 DEMA가 작동 범위 내에서 임의의 응력을 생성하도록 명령할 수 있다. DEMA가 임의의 초기 응력을 생성하려면, 사전 변형되어야 하며, DEMA가 활성화되어 제로 응력을 생성할 수 있는 영역이 있다는 점은 주목할 가치가 있다. 로봇 설계자는 그 용례에 맞게 작업 공간을 활용하는 방법을 학습할 것이다.
특정 용례에 대해 DEMA를 가공할 때, OD(1)를 감소시키면 작동 전압이 감소되고, 그 때문에 매우 바람직한 최적화이다. 주어진 알파 값에 대해, OD(1)를 감소시키면 또한 각각의 섬유가 더 나은 자체 격리 특성을 나타내기 때문에 섬유 번들의 신뢰성도 증가된다(아래에 설명됨). 임의의 작동 이론에 의해 제한되지 않고, 임의의 주어진 길이의 섬유에 대한 OD를 감소시키는 절충안은 코어 저항을 증가시켜 전기 RC 시간 상수를 증가시킨다는 것이다. 따라서, 주어진 용례에 대해 OD를 얼마나 감소시켜야 하는 지에 대해 한계가 있다. 섬유의 길이가 공지되어 있는 주어진 액추에이터는 섬유의 길이, 알파 값 및 OD에 의해 정의되는 전기적 RC 시간 상수를 갖게 된다. 따라서, 액추에이터에 필요한 길이가 설정되면, 일반적으로 OD에 의해 좌우되는 섬유의 스케일을 설정하여, DEMA의 전기적 시간 상수가 용례에서 요구하는 것보다 더 빠름을 보장할 수 있다.
도 5b는 DEMA의 작동 공간이 알파 선택에 의해 어떻게 영향을 받는 지를 도시한다. 임의의 주어진 DE 재료에 대해, 낮은 알파 값(예를 들어, 약 1.1)은 매우 얇은 벽을 갖는 마이크로섬유를 초래하며, 이러한 마이크로섬유는 소량의 엘라스토머 재료로 인해 매우 낮은 유효 탄성 계수를 갖고 일반적으로 구동되거나 변형될 때 상당한 응력을 생성할 수 없다. 이와 달리, 매우 높은 알파 값(예를 들어, 약 6)을 갖는 DEMA는 매우 두꺼운 벽을 갖는 마이크로섬유를 초래하며, 이러한 마이크로섬유는 다량의 엘라스토머 재료로 인해 높은 유효 탄성 계수를 갖는다. 두꺼운 벽의 마이크로섬유는 상당한 응력을 생성할 수 있지만, 너무 뻣뻣하여 그 전기 활성 응답이 감소되고, 더 작은 작동 공간을 가지며 궁극적으로 기계적 에너지 출력을 더 적게 생성할 수 있다. 도 5b에 예시된 재료의 경우, 최적의 알파 값은 약 1.6이며, 이는 작동 공간을 최대화하고 가장 큰 기계적 에너지 출력을 생성하기 위해 엘라스토머 재료의 강성을 밸런싱한다.
신뢰성과 관련하여, DEMA는 필름 기반 유전체 엘라스토머 액추에이터보다 독특한 이점을 갖는다. 이 이점은, 미리 정해진 알파 값이 있는 DEMA에서, OD, 따라서 ID를 작은 값(예를 들어, 약 200 ㎛ 미만)으로 감소시키면 이 전도체의 면적이 감소되기 때문에 내부 전극의 저항이 증가된다는 사실로부터 비롯된다. 이러한 저항 증가는, 유전 파괴로 인한 고장이 섬유 길이를 따라 발생할 때, 이 고장 지점 또는 단락이 자연스럽게 코어의 고저항을 통해 다른 섬유 및 전력 공급원으로부터 격리되기 때문에 유리하다. 어떤 의미에서는, 작은 DEMA 코어의 고저항은 나머지 개별 섬유로부터 그리고 DEMA에 묶인 다른 섬유로부터 고장 지점을 상당한 정도로 격리시키는 소프트 단락을 생성한다. DEMA 코어의 저항 증가는 전기적 RC 시간 상수에는 영향을 미치지만 전기 효율에는 영향을 미치지 않으므로, 코어 저항을 용례의 전기적 시간 상수를 만족시키는 가능한 최대값으로 증가시키는 것이 바람직하다. 내부(코어) 전극의 저항은 DEMA의 스케일(OD)을 선택함으로써 뿐만 아니라 원하는 체적 저항률을 갖는 전극 재료를 선택함으로써 제어될 수 있다.
적절한 전극 재료는 유연성, 유동성 또는 양자 모두를 특징으로 할 수 있다. 유동성 재료는 통상적으로 용기의 형태를 취하거나 상당한 표면 장력에 의해 허용될 때 얇은 필름으로서 표면에 부착된다. 적절한 전극 재료의 다양한 예가 US7834527호에도 제공되며, 유연 전극에 관한 관련 부분은 본 명세서에 참조로 포함된다. DE 마이크로섬유의 내부(코어)에 사용하기에 적절한 전극 재료는 통상적으로 유동성이다. 적절한 전극 재료는 본질적으로 수성 또는 비-수성일 수 있다. 수성 유동성 전극 재료는 약 5 내지 5000 ohm-cm 범위의 체적 저항률을 발생시키는 용해된 이온 및/또는 전해질을 갖는 물을 포함한다. 금속 플레이크, 카본 블랙, 그래핀, 탄소 나노튜브 등과 같은 전기 전도성 입자가 점성 유체 매트릭스에 집중적으로 분산되어 구성되는 전도성 그리스와 같은 적절한 비-수성 전도성 유체가 또한 고려된다. 상업적으로 입수 가능한 전도성 그리스의 예는 30 ohm-cm(0.3 ohm-m)의 체적 저항률을 갖는 것으로 보고된, 미국 매사추세츠주 페어헤이븐 소재의 Nye Lubricants의 Nyogel™ 756G이다. 적절한 전도성 유체는 또한 전도성 잉크를 포함할 수 있다.
예시 목적을 위해, 상업적으로 입수 가능한 DOW Corning Sylgard™ 실리콘 엘라스토머 화합물로 제조된 DEMA를 설명할 수 있다. 이러한 재료로 제조된 DEMA의 경우, OD = ~133 ㎛ 및 알파 ~2를 갖는 섬유가 4.9%의 변형률을 생성할 수 있는 864 kV의 최대 작동 전압을 갖는다는 것을 실험적으로 관찰하였다. 도 5d는 이러한 DEMA로부터 기록된 데이터를 도시한다. 시뮬레이션은 외경을 50 ㎛로 감소시키면 작동 전압이 ~300V로 감소될 것으로 예상한다. 유효 변형률, 유효 응력, 단위 체적 또는 질량당 기계적 에너지 출력은 이 스케일링으로 변경되지 않는다.
본 발명에 사용되는 중공 섬유를 제조하는 데 적절한 엘라스토머 재료를 제조하기 위한 상업적으로 이용 가능한 엘라스토머 재료 및 전구체의 예는, Dow Chemical로부터 입수 가능한 Sylgard™ 패밀리 또는 Silastic LC 패밀리, Gelest로부터 입수 가능한 DMS-V31 시리즈, Kuraray로부터 입수 가능한 Septon2063과 같은 열가소성 엘라스토머, Wacker Chemie로부터 입수 가능한 액화 고무 화합물의 Elastosil 시리즈, Momentive로부터 입수 가능한 Silopren UV Electro 시리즈, 3M이 4905 VHB 테이프 시리즈에 사용하는 아크릴 폴리머, BJB Enterprises로부터 입수 가능한 TC-5000 시리즈, 및 Nusil로부터 입수 가능한 CF19 시리즈를 포함한다.
주어진 길이 및 변위 요구 사항에 대한 바람직한 실시예를 달성하기 위해, DEMA의 설계는 재료 선택, OD의 선택 및 알파 값의 선택의 세 가지 고려 사항을 수반한다. 일부 바람직한 실시예에서, 중공 섬유 재료는 액추에이터에 장력을 제공하기에 적절한 영률, 높은 유전 상수 및 높은 유전 파괴를 갖는 것을 특징으로 하는 엘라스토머 재료를 포함한다. 적절한 중공 섬유의 적절한 영률 값은 약 100 kPa 내지 약 5,000 kPa, 바람직하게는 약 300 kPa 내지 약 2400 kPa, 약 400 kPa 내지 약 2000 kPa, 더욱 바람직하게는 약 500 kPa 내지 1500 kPa, 훨씬 더 바람직하게는 약 600 kPa 내지 1200 kPa 범위일 수 있다. 이는 도 6에 추가로 예시되어 있다. 바람직한 OD는 요구되는 기계적 응답 시간보다 더 작은 전기적 RC 시간 상수를 갖는 섬유를 여전히 초래하는 최소 OD이다. 그 후, 알파 값은 전기기계적 성능의 "스위트 스폿"을 정의할 수 있고, 성능은 유효 작업 밀도 또는 유효 비에너지, 유효 응력, 유효 응력 또는 전기기계적 효율성을 조절함으로써 최대화될 수 있다.
인간이나 동물과 유사한 스케일로 작동하도록 의도된 로봇 시스템의 경우, 100 내지 200 밀리초(ms)의 시간 상수가 적절하다. 일부 애플리케이션에서는, 50 ms만큼 낮은 시간 상수를 사용할 수 있으므로, 50 내지 200 ms 범위도 유용하다. 특수 마이크로스케일 액추에이터는 또한 빠른 트위치 응답을 제공하거나 마이크로로봇에서 작동하기 위해 50 ms보다 더 작은 시간 상수, 아마도 40 ms, 30 ms, 20 ms 또는 10 ms만큼 낮은 시간 상수가 필요할 것으로 예상된다. 다른 실시예에서, 시간 상수는 75 ms 내지 150 ms의 범위일 수 있다. 스케일이 훨씬 더 큰 다른 구조적 용례는 도어 폐쇄 또는 벽 및 격벽의 움직임과 같은 훨씬 더 느린 시간 상수(예를 들어, 약 1000 ms 초과 또는 심지어 최대 약 10,000 ms)를 필요로 할 수 있지만, 광학 편향기 또는 사운드 스피커와 같은 다른 특수 움직임 용례는 10 ms보다 더 작은(즉, 더 빠른) 시간 상수, 아마도 1 ms 또는 심지어 0.1 ms만큼 작은 시간 상수를 필요로 할 수 있다.
본 명세서에 사용될 때, 전도성 재료와 관련하여 "유동성"이라는 용어는, 예를 들어 DE 마이크로섬유 중공 섬유 본체의 내부 코어 내로 유동하기 위해 유동할 수 있는 재료를 지칭한다. 몇몇 실시예에서, 유동성 전도성 재료는 중공 섬유 본체의 내부 코어를 본질적으로 완전히 채우는 액체로서 작용하는 것으로 고려된다. 이들 실시예에서, 내부 코어의 유동성 전도체는 작동 조건에서 본질적으로 비압축성이다. 다른 실시예에서, 유동성 도체가 중공 섬유 본체의 내부 코어의 내벽에 액체 필름을 형성하며, 발포체 또는 분말과 같은 압축 가능한 고체, 또는 공기, 질소 또는 아르곤과 같은 기체와 같은 압축 가능한 유체와 같은 다른 유형의 물질로 내부 코어의 나머지를 채우는 것이 고려된다. 이러한 실시예에서, 내부 코어는 유연성, 예를 들어 작동 조건 하에서 압축 가능한 및/또는 적어도 부분적으로 변형 가능한 것을 특징으로 할 수 있다. 내부 유동성 전극의 주요 고려 사항은, 마이크로섬유 신장 동안 체적이 사실상 일정하게 유지되며, 그렇게 함으로써 마이크로섬유 변형을 제한하여, 벽이 맥스웰 응력에 의해 압축될 때, 섬유는 길이가 증가하고 직경이 수축되어 이 일정한 체적을 유지해야 한다는 것이다.
예
DEMA는 US7834527B2호에 설명된 것과 유사한 프로세스를 사용하여 DOW Corning으로부터 상업적으로 입수 가능한 실리콘 수지를 사용하여 합성된 DE 섬유로 제조되었다. 본 개시내용의 목적을 위해, 교정된 검사 현미경을 통해 두 세트의 섬유 샘플을 단면화하고 이미징하며, 도 7에 도시된 바와 같이 이미지 분석을 사용하여 외경 및 내경을 측정하고 표 1에 요약하였다. 도 7a 및 도 7b는 2개의 상이한 DE 섬유인, 샘플 A와 샘플 B 각각의 단면에 대한 일련의 마이크로 이미지를 도시한다. 도 7c 및 도 7d는, DE 섬유 샘플 A 및 샘플 B 각각에 대해, DE 섬유의 외경(OD) 및 내경(ID)을 측정하기 위한 단면 마이크로 이미지 각각에 대해 획득한 이미지 분석 결과를 제공한다. 표 1은 샘플 A와 B에 대한 평균 외경 및 내경과 알파 비율 뿐만 아니라 1.57에서 샘플 A에서 B까지의 외경(OD) 비율을 요약한다.

도 7에 단면으로 도시된 DEMA는, 고정 질량이 DEMA 세그먼트로부터 현수된 다음 다양한 진폭에서 1 Hz 정현파 전압으로 전기적으로 활성화되는 등장성 테스트를 통해 전기기계적으로 테스트되었다. 결과 변위를 측정하고 변형률로 변환하였다. 인가된 힘을 단면적으로 나누어 응력으로 변환하였다. 결과적인 변형률 대 인가 전압은 도 8에 플롯되어 있고, 데이터에 맞는 계수는 비교를 용이하게 하기 위해 표 2에 도표화하였다. 샘플 B의 외경은 샘플 A보다 1.57배 더 크며, 이는 샘플 A가 1.57배 더 낮은 전압으로 동일한 변형률을 생성해야 한다고 예측한다. 그러나, 놀랍게도, 관찰된 전기 활성 계수(표 2의 X)는, 샘플 A가 샘플 B와 동일한 변형률을 생성하지만 1.96 더 낮은 활성화 전압에서 생성한다는 것을 도시한다. 이 24% 추가 전기 활성은, 샘플 A가 2.06의 알파 값을 갖는 반면 샘플 B가 2.53의 알파 값을 갖는다는 사실에 의해 잘 설명된다.

범위가 분자량과 같은 물리적 특성, 또는 화학식과 같은 화학적 특성에 대해 본 명세서에 사용되는 경우, 그 안의 특정 실시예에 대한 범위의 모든 조합 및 하위 조합이 포함되는 것으로 의도된다.
이 문헌에 인용되거나 설명된 각각의 특허, 특허 출원, 및 간행물의 개시내용은 그 전문이 참조로 본 명세서에 포함된다.
본 기술 분야의 숙련자는 본 발명의 바람직한 실시예에 대해 수많은 변경 및 수정이 이루어질 수 있으며, 이러한 변경 및 수정은 본 발명의 사상을 벗어나지 않고 이루어질 수 있음을 이해할 것이다. 따라서, 첨부된 청구범위는 본 발명의 진정한 사상 및 범위 내에 속하는 그러한 모든 등가 변형을 포함하는 것으로 의도된다.
인용 문헌:
[1]
R. Pelrine, Q. Pei, 및 R. Kornbluh, "Dielectric elastomers: past, present, and potential future," 2018, vol. 10594, no., pp. 1059406-1059408.
[2]
P. Brochu 및 Q. Pei, "Advances in dielectric elastomers for actuators and artificial muscles," Macromolecular Rapid Communications, vol. 31, no. 1. pp. 10-36, 2010.
[3]
Y. Bar-cohen 및 J. P. L. Caltech, "Artificial Muscles using Electroactive Polymers (EAP): Capabilities, Challenges and Potential Electroactive Polymers (EAP)," Robot. 2000, pp. 1-14, 2002.
[4]
F. Carpi, D. De Rossi, R. Kornbluh, R. Pelrine, 및 P. Sommer-Larsen, Dielectric elastomers as electromechanical transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology. 2008.
[5]
R. PELRINE, R. KORNBLUH, 및 G. KOFOD, "High-strain actuator materials based on dielectric elastomers," Adv. Mater., vol. 12, no. 16, pp. 1223-1225, 2000.
[6]
Y. Bar-Cohen, "Electroactive Polymer (EAP) Actuators as Artificial Muscles," Yoseph Bar-Cohen, no. 1, p. 758, 2004.
[7]
R. Pelrine, R. Kornbluh, 및 G. Kofod, "High-strain actuator materials based on dielectric elastomers," Adv. Mater., vol. 12, no. 16, pp. 1223-1225, 2000.
[8]
R. Kornbluh 등, "Electroelastomers: Applications of dielectric elastomer transducers for actuation, generation, and smart structures," Proceeding SPIE Vol. 4698, vol. 4698, pp. 254-270, 2002.
[9]
F. Carpi, C. Menon, 및 D. De Rossi, "Electroactive elastomeric actuator for all-polymer linear peristaltic pumps," IEEE/ASME Trans. Mechatronics, vol. 15, no. 3, pp. 460-470, 2010.
[10]
R. P. Heydt, R. Kornbluh, J. Eckerle, 및 R. Pelrine, "Dielectric elastomer loudspeakers," in Dielectric Elastomers as Electromechanical Transducers, 2008, pp. 313-320.
[11]
R. Pelrine 등, "Applications of dielectric elastomer actuators," Proc. SPIE, vol. 4329, no. 1, pp. 335-349, 2001.
[12]
L. Maffli, S. Rosset, M. Ghilardi, F. Carpi, 및 H. Shea, "Ultrafast all-polymer electrically tunable silicone lenses," Adv. Funct. Mater., vol. 25, no. 11, pp. 1656-1665, 2015.
[13]
I. A. Anderson 등, "A thin membrane artificial muscle rotary motor," Appl. Phys. A Mater. Sci. Process., vol. 98, no. 1, pp. 75-83, 2010.
[14]
B. M. O'Brien, T. G. McKay, T. A. Gisby, 등 I. A. Anderson, "Rotating turkeys and self-commutating artificial muscle motors," Appl. Phys. Lett., vol. 100, no. 7, 2012.
[15]
F. Carpi, A. Migliore, G. Serra, 및 D. De Rossi, "Helical dielectric elastomer actuators," Smart Mater. Struct., vol. 14, no. 6, pp. 1210-1216, 2005.
[16]
A. T. Conn 및 J. Rossiter, "Towards holonomic electro-elastomer actuators with six degrees of freedom," Smart Mater. Struct., vol. 21, no. 3, 2012.
[17]
R. Pelrine, "Dielectric elastomer artificial muscle actuators: toward biomimetic motion," Proc. SPIE, vol. 4695, no. 3, pp. 126-137, 2002.
[18]
G. Kovacs, L. Duering, S. Michel, 및 G. Terrasi, "Stacked dielectric elastomer actuator for tensile force transmission," Sensors Actuators, A Phys., vol. 155, no. 2, pp. 299-307, 2009.
[19]
C. T. Nguyen 등, "A small biomimetic quadruped robot driven by multistacked dielectric elastomer actuators," Smart Mater. Struct., vol. 23, no. 6, 2014.
[20]
Q. Pei, M. a. Rosenthal, R. Pelrine, S. Stanford, 및 R. D. Kornbluh, "Multifunctional electroelastomer roll actuators and their application for biomimetic walking robots," SPIE Smart Struct. Mater., vol. 5051, pp. 281-290, 2003.
[21]
R. Zhang, P. Lochmatter, G. Kovacs, A. Kunz, 및 F. Conti, "Portable force feedback device based on miniature rolled dielectric elastomer actuators," in Dielectric Elastomers as Electromechanical Transducers, 2008, pp. 207-216.
[22]
R. Alvarez Icaza Rivera, J. M. Alvarez Sanches, K. Galloway, H. Katzenberg, R. Kothari, 및 J. Arthur, "Dielectric elastomer fiber transducers," US7834527, 2005.
[23]
Hills Inc., "Hills Nano-Technology," 2005.
Claims (32)
- 복수의 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들이며,
a. 유전체 엘라스토머 마이크로섬유 각각의 단면 환형 면과 지지 요소(단부 캡) 사이의 직접적인 기계적 연결; 및
b. 모든 마이크로섬유의 코어와 전도성 접점 사이의 직접적인 전기적 연결을 포함하는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들. - 제1항에 있어서, 직접적인 기계적 연결 및 직접적인 전기적 연결은 모두 전기 전도성 접착제 또는 전기 전도성 접합 재료를 사용하여 달성되는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- 제2항에 있어서, 전기 전도성 접착제 또는 전기 전도성 접합 재료는, 중공 유전체 엘라스토머 마이크로섬유의 코어 내에서 유동성 전극과 전기 통신하면서 전도성 요소를 마이크로섬유 벽 재료에 물리적으로 접합시키는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- 제3항에 있어서, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들은 에폭시 수지, 시아노아크릴레이트 또는 실리콘과 접합되는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- 제3항에 있어서, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들은 실리콘을 포함하는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- 제3항에 있어서, 전기적 연결은 마이크로섬유 코어와 전기 전도성 접점 사이에 유동성 공동을 형성함으로써 달성되고, 기계적 연결은 번들 밀봉부의 주연부에서 달성되는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- 제1항에 있어서, 전도성 지지부는 마이크로섬유 번들의 복수의 마이크로섬유 각각의 전기 전도성 코어 내로 삽입된 핀 또는 접점의 어레이를 갖는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- 제7항에 있어서, 기계적 연결은 접착제 또는 접합제에 의해 보강되는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- 제1항에 있어서, 전기적 연결은 집적 회로와 유사한 접합 패드 링 및 접합 와이어를 사용하여 달성되는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- 제9항에 있어서, 기계적 연결은 번들 밀봉부의 면(원통형 링 에지) 또는 주연부에 배치된 접착제 또는 접합제에 의해 달성되는, 유전체 엘라스토머 마이크로섬유의 전기기계적으로 연결된 번들.
- DE 마이크로섬유이며, 외경 및 내경을 갖는 것을 특징으로 하는 중공 섬유 본체, 중공 섬유 본체의 내부에 배치된 내부 유동성 또는 유연 전극, 및 중공 섬유 본체 외부에 배치된 외부 유동성 또는 유연 전극을 포함하고, 중공 섬유 본체의 내경에 대한 외경의 비율 알파는 액추에이터로서 DE 마이크로섬유의 전기기계적 성능을 최대화하도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 비율 알파는 기계적 에너지 출력을 최대화하도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 비율 알파는 유효 작업 밀도를 최대화하도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 비율 알파는 유효 비에너지를 최대화하도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 비율 알파는 기계적 전력 밀도를 최대화하도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 비율 알파는 기계적 비출력을 최대화하도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 비율 알파는 유효 변형률을 최대화하도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 비율 알파는 유효 응력을 최대화하도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 전기적 시간 상수는 약 1000 ms 미만, 바람직하게는 약 500 ms 미만, 바람직하게는 약 200 ms 미만인, DE 마이크로섬유.
- 제11항에 있어서, OD가 감소되어 목표 작동 전압에서 번들 내 1000개 섬유 중 1 미만의 고장률을 구현하는, DE 마이크로섬유.
- 제11항에 있어서, 내부 전극의 저항률은 섬유가 약 200 ms 미만의 전기적 시간 상수를 갖도록 가공되는, DE 마이크로섬유.
- 제11항에 있어서, 내부 전극의 스케일(OD), 비율 알파 및 저항률은 마이크로섬유가 용례의 기계적 시간 상수와 일치하는 전기적 시간 상수를 갖도록 선택되는, DE 마이크로섬유.
- 제11항에 있어서, 중공 섬유 본체는 실리콘 엘라스토머 재료를 포함하는, DE 마이크로섬유.
- 제11항에 있어서, 중공 섬유 본체는 열경화성 엘라스토머 재료를 포함하는, DE 마이크로섬유.
- 제11항에 있어서, 중공 섬유 본체는 열가소성 엘라스토머 재료를 포함하는, DE 마이크로섬유.
- 제11항에 있어서, 중공 섬유 본체는 우레탄 엘라스토머 재료를 포함하는, DE 마이크로섬유.
- 제11항에 있어서, 중공 섬유 본체는 폴리에스테르 엘라스토머 재료를 포함하는, DE 마이크로섬유.
- 제11항에 있어서, 중공 섬유 본체는 아크릴 엘라스토머 재료를 포함하는, DE 마이크로섬유.
- 제11항에 있어서, 중공 섬유 본체는 100 kPa 내지 5000 kPa 범위의 영률을 갖는 것을 특징으로 하는 엘라스토머 재료를 포함하는, DE 마이크로섬유.
- 제11항에 있어서, DE 마이크로섬유는 400 kPa 내지 800 kPa의 수동 탄성 상수를 갖는 것을 특징으로 하는, DE 마이크로섬유.
- 제11항에 있어서, DE 마이크로섬유에 의해 생성된 응력은, 내부 전극과 외부 전극 사이의 활성화 전압을 사용하여 전기적으로 활성화될 때 0으로 감소되는, DE 마이크로섬유.
- 제11항에 있어서, DE 마이크로섬유는, 내부 전극과 외부 전극 사이에 활성화 전압이 없을 때, 원하는 기준선 응력을 생성하도록 사전 응력을 받는, DE 마이크로섬유.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202063003921P | 2020-04-02 | 2020-04-02 | |
| US202063003922P | 2020-04-02 | 2020-04-02 | |
| US63/003,922 | 2020-04-02 | ||
| US63/003,921 | 2020-04-02 | ||
| PCT/US2021/025603 WO2021230993A2 (en) | 2020-04-02 | 2021-04-02 | Dielectric elastomer microfiber actuators |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220160669A true KR20220160669A (ko) | 2022-12-06 |
Family
ID=78526467
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227037870A KR20220160669A (ko) | 2020-04-02 | 2021-04-02 | 유전체 엘라스토머 마이크로섬유 액추에이터 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20230147640A1 (ko) |
| EP (1) | EP4126287A4 (ko) |
| JP (1) | JP2023521031A (ko) |
| KR (1) | KR20220160669A (ko) |
| CN (1) | CN115666750A (ko) |
| WO (1) | WO2021230993A2 (ko) |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4854664A (en) * | 1986-11-17 | 1989-08-08 | Rockwell International Corporation | Multi-fiber optic cable connector and cable apparatus |
| US6630231B2 (en) * | 1999-02-05 | 2003-10-07 | 3M Innovative Properties Company | Composite articles reinforced with highly oriented microfibers |
| US7427165B2 (en) * | 2004-06-16 | 2008-09-23 | Spectros Corporation | Optical and electrical hybrid connector |
| EP1814713A4 (en) * | 2004-11-09 | 2017-07-26 | Board of Regents, The University of Texas System | The fabrication and application of nanofiber ribbons and sheets and twisted and non-twisted nanofiber yarns |
| US7834527B2 (en) * | 2005-05-05 | 2010-11-16 | SmartMotion Technologies, Inc. | Dielectric elastomer fiber transducers |
| KR20100053536A (ko) * | 2007-06-29 | 2010-05-20 | 아트피셜 머슬, 인코퍼레이션 | 감각적 피드백을 부여하는 전기활성 고분자 변환기 |
| US8471438B2 (en) * | 2009-08-27 | 2013-06-25 | Canon Kabushiki Kaisha | Actuator with sensor |
| US9638859B1 (en) * | 2016-01-12 | 2017-05-02 | Elenion Technologies, Llc | Optical fiber alignment device |
| KR102135089B1 (ko) * | 2018-04-27 | 2020-07-17 | 엘지전자 주식회사 | 전기 활성 섬유 |
-
2021
- 2021-04-02 EP EP21803033.6A patent/EP4126287A4/en active Pending
- 2021-04-02 US US17/995,353 patent/US20230147640A1/en active Pending
- 2021-04-02 JP JP2022560223A patent/JP2023521031A/ja active Pending
- 2021-04-02 KR KR1020227037870A patent/KR20220160669A/ko unknown
- 2021-04-02 WO PCT/US2021/025603 patent/WO2021230993A2/en unknown
- 2021-04-02 CN CN202180037897.3A patent/CN115666750A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021230993A2 (en) | 2021-11-18 |
| EP4126287A2 (en) | 2023-02-08 |
| CN115666750A (zh) | 2023-01-31 |
| US20230147640A1 (en) | 2023-05-11 |
| EP4126287A4 (en) | 2024-05-08 |
| JP2023521031A (ja) | 2023-05-23 |
| WO2021230993A3 (en) | 2022-03-17 |
| WO2021230993A9 (en) | 2021-12-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Aziz et al. | Torsional artificial muscles | |
| Mirfakhrai et al. | Polymer artificial muscles | |
| Jean-Mistral et al. | Comparison of electroactive polymers for energy scavenging applications | |
| US7834527B2 (en) | Dielectric elastomer fiber transducers | |
| Xu et al. | Flexible energy harvester on a pacemaker lead using multibeam piezoelectric composite thin films | |
| WO2007023625A1 (ja) | 高分子アクチュエータ | |
| Wax et al. | Electroactive polymer actuators and devices | |
| KR102209508B1 (ko) | 인공 근육 | |
| WO2018175741A1 (en) | Hydraulically amplified self-healing electrostatic transducers | |
| JP4696662B2 (ja) | アクチュエータモジュール | |
| Taghavi et al. | A Novel Soft Metal‐Polymer Composite for Multidirectional Pressure Energy Harvesting | |
| O'Neill et al. | Rapid 3D printing of electrohydraulic (HASEL) tentacle actuators | |
| Pelrine et al. | Electromechanical transduction effects in dielectric elastomers: actuation, sensing, stiffness modulation and electric energy generation | |
| JP2013055877A (ja) | アクチュエータ | |
| KR101779692B1 (ko) | 인공 근섬유 구동기 | |
| KR20220160669A (ko) | 유전체 엘라스토머 마이크로섬유 액추에이터 | |
| KR20210086518A (ko) | 불균일 공간 전하층과 유전성 유체를 이용한 주머니 형태의 유연 구동기 | |
| Carpi et al. | A new contractile linear actuator made of dielectric elastomers | |
| JP2011103713A (ja) | アクチュエーター | |
| JP2009032773A (ja) | 繊維状高分子アクチュエータおよびその製造方法ならびにこれらの多数の繊維状高分子アクチュエータの集合体からなる高分子アクチュエータ | |
| Cottinet et al. | Electrostrictive polymers as high-performance electroactive polymers for energy harvesting | |
| Kanda | High strain electrostrictive polymers: elaboration methods and modelization | |
| KR20190124866A (ko) | 전기 활성 섬유 | |
| Spinks et al. | An introduction to conducting polymer actuators | |
| Chuc et al. | Linear artificial muscle actuator based on synthetic elastomer |