KR20220155314A - Reset stored data related to monitored operating parameters based on detected initiation of pick-up operation - Google Patents
Reset stored data related to monitored operating parameters based on detected initiation of pick-up operation Download PDFInfo
- Publication number
- KR20220155314A KR20220155314A KR1020227034811A KR20227034811A KR20220155314A KR 20220155314 A KR20220155314 A KR 20220155314A KR 1020227034811 A KR1020227034811 A KR 1020227034811A KR 20227034811 A KR20227034811 A KR 20227034811A KR 20220155314 A KR20220155314 A KR 20220155314A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- load
- handling assembly
- truck
- controller
- Prior art date
Links
- 230000000977 initiatory effect Effects 0.000 title description 4
- 238000000034 method Methods 0.000 claims abstract description 29
- 238000012544 monitoring process Methods 0.000 claims abstract description 16
- 230000007704 transition Effects 0.000 claims description 16
- 238000004891 communication Methods 0.000 claims description 3
- 230000003319 supportive effect Effects 0.000 claims 1
- 230000001133 acceleration Effects 0.000 description 169
- 230000004044 response Effects 0.000 description 13
- 238000004422 calculation algorithm Methods 0.000 description 11
- 238000004364 calculation method Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 8
- 238000012937 correction Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 5
- 230000001172 regenerating effect Effects 0.000 description 5
- 230000003044 adaptive effect Effects 0.000 description 3
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 238000005007 materials handling Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 230000009118 appropriate response Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000008092 positive effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000002459 sustained effect Effects 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07581—Remote controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/24—Electrical devices or systems
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Testing And Monitoring For Control Systems (AREA)
Abstract
자재 취급 차량을 작동시키기 위한 방법이 제공되며, 방법은, 컨트롤러에 의해, 조작자에 의한 차량의 수동 조작 동안 제1 차량 운전 파라미터를 모니터링하는 단계; 컨트롤러에 의해, 모니터링된 제1 차량 운전 파라미터와 관련된 데이터를 저장하는 단계를 포함한다. 컨트롤러는 차량의 수동 조작에 후속하여 차량의 반자동 운전을 구현하기 위해 저장된 데이터를 사용하도록 구성된다. 방법은, 컨트롤러에 의해, 차량의 수동 조작 동안 발생하는 픽업 조작의 시작을 나타내는 차량의 조작을 검출하는 단계; 및 픽업 조작의 시작을 검출하는 것에 기초하여, 컨트롤러에 의해, 모니터링된 제1 차량 운전 파라미터와 관련된 저장된 데이터를 재설정하는 단계를 추가로 포함한다.A method for operating a material handling vehicle is provided, the method comprising: monitoring, by a controller, a first vehicle operating parameter during manual manipulation of the vehicle by an operator; and storing, by the controller, data related to the monitored first vehicle driving parameter. The controller is configured to use the stored data to implement semi-autonomous driving of the vehicle following manual manipulation of the vehicle. The method includes: detecting, by a controller, manipulation of the vehicle indicating the start of a pick-up manipulation occurring during manual manipulation of the vehicle; and based on detecting the start of the pick-up operation, resetting, by the controller, stored data related to the monitored first vehicle driving parameter.
Description
본 발명은 픽업 조작의 검출된 시작에 기초하여, 모니터링된 운전 파라미터와 관련된 저장 데이터 재설정에 관한 것이다.The present invention relates to resetting stored data related to monitored operating parameters based on a detected initiation of a pick-up operation.
자재 취급 차량은 일반적으로 창고 및 유통 센터에서 재고품을 픽업하는데 사용된다. 이러한 차량은 전형적으로 동력 유닛, 및 화물 운반 포크를 포함할 수 있는 화물 취급 조립체를 포함한다. 차량은 또한 차량의 조작 및 이동을 제어하기 위한 제어 구조를 가진다.Material handling vehicles are commonly used to pick up inventory from warehouses and distribution centers. Such vehicles typically include a power unit and a load handling assembly that may include a load carrying fork. The vehicle also has a control structure for controlling the operation and movement of the vehicle.
일반적인 재고품 픽업 조작에서, 조작자는 창고 또는 유통 센터의 하나 이상의 통로를 따라서 제공되는 보관 영역에 위치된 이용 가능한 재고 품목으로부터 주문을 채운다. 조작자는 품목(들)이 픽업될 다양한 픽업 위치 사이에서 차량을 운전한다. 조작자는 차량의 제어 구조를 사용하는 것에 의해 또는 차량과 관련된 무선 원격 제어 디바이스를 통해 차량을 운전할 수 있다.In a typical inventory pick-up operation, operators fill orders from available inventory items located in storage areas provided along one or more aisles of a warehouse or distribution center. An operator drives the vehicle between various pick-up locations from which the item(s) are to be picked up. An operator may drive the vehicle by using the vehicle's control structure or via a wireless remote control device associated with the vehicle.
본 개시내용은, 컨트롤러에 의해, 조작자에 의한 차량의 수동 조작 동안 제1 차량 운전 파라미터를 모니터링하는 단계; 컨트롤러에 의해, 모니터링된 제1 차량 운전 파라미터와 관련된 데이터를 저장하는 단계로서, 컨트롤러는 차량의 수동 조작에 후속하여 차량의 반자동 운전 조작을 구현하기 위해 저장된 데이터를 이용하도록 구성되는, 상기 단계; 컨트롤러에 의해, 차량의 수동 조작 동안 발생하는 픽업 조작의 시작을 나타내는 차량의 조작을 검출하는 단계; 및 픽업 조작의 시작을 검출하는 것에 기초하여, 컨트롤러에 의해, 모니터링된 제1 차량 운전 파라미터와 관련된 저장 데이터를 재설정하는 단계를 포함하는 자재 취급 차량을 조작하기 위한 방법에 관한 것이다.The present disclosure relates to monitoring, by a controller, a first vehicle driving parameter during manual manipulation of the vehicle by an operator; storing, by a controller, data related to the monitored first vehicle driving parameter, wherein the controller is configured to utilize the stored data to implement semi-automatic driving operations of the vehicle subsequent to manual operation of the vehicle; detecting, by the controller, an operation of the vehicle indicating a start of a pick-up operation occurring during manual operation of the vehicle; and resetting, by the controller, stored data related to the monitored first vehicle operating parameter based on detecting the start of the pick-up operation.
본 명세서에 개시된 실시예에 따른 방법은 저장된 데이터를 재설정한 후에 컨트롤러에 의해 제1 차량 운전 파라미터의 모니터링을 재개하는 단계를 추가로 포함한다.Methods according to embodiments disclosed herein further include resuming monitoring of the first vehicle driving parameter by the controller after resetting the stored data.
본 명세서에 개시된 실시예에 따르면, 차량의 검출된 조작은 상승된 화물 취급 조립체를 가진 수동으로 운전되는 차량으로부터 하강된 화물 취급 조립체를 가진 정지되는 차량으로의 전환을 포함한다. 더욱이, 상승된 화물 취급 조립체는 실질적으로 0이 아닌 화물을 지지할 수 있고, 하강된 화물 취급 조립체는 실질적으로 0인 화물을 지지할 수 있다.In accordance with embodiments disclosed herein, the detected manipulation of the vehicle includes switching from a manually operated vehicle with the load-handling assembly raised to a stationary vehicle with the load-handling assembly lowered. Moreover, the raised load handling assembly can support substantially non-zero loads, and the lowered load handling assemblies can support substantially zero loads.
본 명세서에 개시된 실시예에 따르면, 화물 취급 조립체는 하나 이상의 포크를 포함할 수 있고, 차량의 검출된 조작은 거리에 대한 차량의 이동을 추가로 포함하며, 이 거리는 포크에 의해 운반되는 화물의 길이와 적어도 동일할 수 있다. 특히, 포크에 의해 운반되는 화물의 길이와 적어도 동일한 거리에 대한 차량의 이동은 하강된 화물 취급 조립체를 가진 정지되는 상태로의 차량의 전환 후에 발생한다.According to embodiments disclosed herein, a load handling assembly may include one or more forks, and the detected manipulation of the vehicle further includes movement of the vehicle over a distance, which distance is a length of cargo carried by the forks. can be at least the same as In particular, movement of the vehicle for a distance at least equal to the length of the load carried by the fork occurs after transition of the vehicle to a stationary state with the lowered load handling assembly.
전술한 실시예 중 어느 하나에 따르면, 차량의 검출된 조작은 하강된 화물 취급 조립체를 가진 차량을 운전하는 단계를 추가로 포함한다. 특히, 하강된 화물 취급 조립체는 실질적으로 0인 화물을 지지할 수 있다.According to any of the foregoing embodiments, the detected manipulation of the vehicle further includes driving the vehicle with the lowered load handling assembly. In particular, the lowered load handling assembly can support substantially zero load.
본 명세서에 개시된 실시예에 따르면, 차량의 검출된 조작은 하강된 화물 취급 조립체를 가진 이동하는 차량으로부터 후속적으로 상승된 화물 취급 조립체를 가진 정지되는 차량으로의 전환을 추가로 포함하고, 후속적으로 상승된 화물 취급 조립체는 사전 결정된 양보다 작지만 실질적으로 0인 화물보다 큰 화물을 지지한다. 예를 들어, 사전 결정된 양보다 작지만 실질적으로 0보다 큰 이러한 화물은 화물 취급 조립체 상의 실질적으로 빈 팔레트를 포함할 수 있다.In accordance with embodiments disclosed herein, the detected manipulation of the vehicle further includes switching from a moving vehicle with a lowered load-handling assembly to a stationary vehicle with a subsequently raised load-handling assembly, and The load handling assembly, raised to , supports a load that is less than a predetermined amount but greater than substantially zero load. For example, such loads that are less than a predetermined amount but greater than substantially zero may include substantially empty pallets on the load handling assembly.
본 명세서에 개시된 실시예에 따르면, 차량의 검출된 조작은 상승된 화물 취급 조립체를 가진 수동으로 운전되는 차량으로부터 하강된 화물 취급 조립체를 가진 정지되는 차량으로의 제1 전환; 화물 취급 조립체에 의해 운반되는 화물의 길이와 적어도 동일한 거리에 대해 하강된 화물 취급 조립체를 가진 차량의 이동으로서, 제1 전환 후에 발생하는 상기 이동; 및 하강된 화물 취급 조립체를 가진 이동하는 차량으로부터 새로 상승된 화물 취급 조립체를 가진 정지되는 차량으로의 제2 전환을 포함한다. 특히, 제2 전환 동안, 하강된 화물 취급 조립체는 실질적으로 0인 화물을 지지하고, 새로 상승된 화물 취급 조립체는 사전 결정된 양보다 작지만 실질적으로 0보다 큰 화물을 지지한다.In accordance with embodiments disclosed herein, the detected manipulation of the vehicle may include first switching from a manually operated vehicle with the load-handling assembly raised to a stationary vehicle with the load-handling assembly lowered; movement of the vehicle with the load handling assembly lowered for a distance at least equal to the length of the load carried by the load handling assembly, said movement occurring after the first shift; and a second transition from a moving vehicle with a lowered load-handling assembly to a stationary vehicle with a newly raised load-handling assembly. In particular, during the second transition, the lowered load-handling assembly supports substantially zero load, and the newly raised load-handling assembly supports substantially greater than zero load that is less than a predetermined amount.
본 명세서에 개시된 실시예에 따르면, 방법은, 컨트롤러에 의해, 조작자에 의한 차량의 수동 조작 동안 제2 차량 운전 파라미터를 모니터링하는 단계; 및 컨트롤러에 의해, 모니터링된 제2 차량 운전 파라미터와 관련된 데이터를 저장하는 단계를 포함하고, 컨트롤러는 차량의 수동 조작에 후속하여 차량의 반자동 운전 조작을 구현하기 위해 모니터링된 제1 및 제2 차량 운전 파라미터의 저장된 데이터를 사용하도록 구성된다.According to embodiments disclosed herein, a method includes monitoring, by a controller, a second vehicle driving parameter during manual manipulation of the vehicle by an operator; and storing, by the controller, data relating to the monitored second vehicle driving parameters, wherein the controller drives the monitored first and second vehicles to implement semi-autonomous driving operations of the vehicle subsequent to manual operation of the vehicle. It is configured to use the stored data of parameters.
본 명세서에 개시된 실시예에 따르면, 화물 취급 차량을 조작하기 위한 시스템은 실행 가능한 명령어를 저장하는 메모리; 및 메모리와 통신하는 프로세서를 포함한다. 특히, 프로세서에 의한 실행 가능한 명령어의 실행은 프로세서로 하여금: 조작자에 의한 차량의 수동 조작 동안 제1 차량 운전 파라미터를 모니터링하고; 모니터링된 제1 차량 운전 파라미터와 관련된 데이터를 저장하는데, 컨트롤러는 차량의 수동 조작에 후속하여 차량의 반자동 운전 조작을 구현하기 위해 저장된 데이터를 사용하도록 구성되고; 차량의 수동 조작 동안 발생하는 픽업 조작의 시작을 나타내는 차량의 조작을 검출하고; 픽업 조작의 시작을 검출하는 것에 기초하여 모니터링된 제1 차량 운전 파라미터와 관련된 저장된 데이터를 재설정하게 한다.According to embodiments disclosed herein, a system for operating a load handling vehicle includes a memory storing executable instructions; and a processor in communication with the memory. In particular, execution of the executable instructions by the processor causes the processor to: monitor a first vehicle driving parameter during manual manipulation of the vehicle by an operator; stores data related to the monitored first vehicle driving parameters, the controller being configured to use the stored data to implement semi-automatic driving operations of the vehicle subsequent to manual operations of the vehicle; detecting an operation of the vehicle indicating the start of a pick-up operation occurring during manual operation of the vehicle; and reset stored data related to the monitored first vehicle driving parameter based on detecting the start of the pick-up operation.
시스템은 저장된 데이터를 재설정한 후에 제1 차량 운전 파라미터의 모니터링을 재개하는 프로세서를 추가로 포함한다.The system further includes a processor that resumes monitoring of the first vehicle operating parameter after resetting the stored data.
본 명세서에 개시된 실시예에 따르면, 차량의 검출된 조작은 상승된 화물 취급 조립체를 가진 수동으로 운전되는 차량으로부터 하강된 화물 취급 조립체를 가진 정지되는 차량으로의 전환을 포함한다. 또한, 상승된 화물 취급 조립체는 실질적으로 0이 아닌 화물을 지지할 수 있고, 하강된 화물 취급 조립체는 실질적으로 0인 화물을 지지할 수 있다.In accordance with embodiments disclosed herein, the detected manipulation of the vehicle includes switching from a manually operated vehicle with the load-handling assembly raised to a stationary vehicle with the load-handling assembly lowered. Also, the raised load handling assembly can support substantially non-zero loads and the lowered load handling assemblies can support substantially zero loads.
본 명세서에 개시된 실시예에 따르면, 화물 취급 조립체는 하나 이상의 포크를 포함할 수 있고, 차량의 검출된 조작은 거리에 대한 차량의 이동을 추가로 포함하며, 이 거리는 포크에 의해 운반되는 화물의 길이와 적어도 동일할 수 있다. 특히, 포크에 의해 운반되는 화물의 길이와 적어도 동일한 거리에 대한 차량의 이동은 하강된 화물 취급 조립체를 가진 정지되는 차량의 전환 후에 발생한다.According to embodiments disclosed herein, a load handling assembly may include one or more forks, and the detected manipulation of the vehicle further includes movement of the vehicle over a distance, which distance is a length of cargo carried by the fork. can be at least the same as In particular, movement of the vehicle for a distance at least equal to the length of the load carried by the fork takes place after reversal of the stationary vehicle with the lowered load handling assembly.
본 명세서에 개시된 실시예에 따르면, 차량의 검출된 조작은 하강된 화물 취급 조립체를 가진 차량을 운전하는 것을 추가로 포함한다. 특히, 하강된 화물 취급 조립체는 실질적으로 0인 화물을 지지할 수 있다.In accordance with embodiments disclosed herein, the detected manipulation of the vehicle further includes driving the vehicle with the lowered load handling assembly. In particular, the lowered load handling assembly can support substantially zero load.
본 명세서에 개시된 실시예에 따르면, 차량의 검출된 조작은 하강된 화물 취급 조립체를 가진 이동하는 차량으로부터 후속적으로 상승된 화물 취급 조립체를 가진 정지되는 차량으로의 전환을 추가로 포함하며, 후속적으로 상승된 화물 취급 조립체는 사전 결정된 양보다 작지만 실질적으로 0인 화물보다 큰 화물을 지지한다.In accordance with embodiments disclosed herein, the detected manipulation of the vehicle further includes switching from a moving vehicle with a lowered load-handling assembly to a stationary vehicle with a subsequently raised load-handling assembly; The load handling assembly, raised to , supports a load that is less than a predetermined amount but greater than substantially zero load.
본 명세서에 개시된 실시예에 따르면, 차량의 검출된 조작은 상승된 화물 취급 조립체를 가진 수동으로 운전되는 차량으로부터 하강된 화물 취급 조립체를 가진 정지되는 차량으로의 제1 전환; 화물 취급 조립체에 의해 운반되는 화물의 길이와 적어도 동일한 거리에 대해 하강된 화물 취급 조립체를 가진 차량의 이동으로서, 제1 전환 후에 발생하는 상기 이동; 및 하강된 화물 취급 조립체를 가진 이동하는 차량으로부터 새로 상승된 화물 취급 조립체를 가진 정지되는 차량으로의 제2 전환을 포함한다. 특히, 제2 전환 동안, 하강된 화물 취급 조립체는 실질적으로 0인 화물을 지지하고, 새로 상승된 화물 취급 조립체는 사전 결정된 양보다 작지만 실질적으로 0인 화물보다 큰 화물을 지지한다.In accordance with embodiments disclosed herein, the detected manipulation of the vehicle may include first switching from a manually operated vehicle with the load-handling assembly raised to a stationary vehicle with the load-handling assembly lowered; movement of the vehicle with the load handling assembly lowered for a distance at least equal to the length of the load carried by the load handling assembly, said movement occurring after the first shift; and a second transition from a moving vehicle with a lowered load-handling assembly to a stationary vehicle with a newly raised load-handling assembly. In particular, during the second transition, the lowered load-handling assembly supports substantially zero load, and the newly raised load-handling assembly supports a load that is less than a predetermined amount but greater than the substantially zero load.
본 명세서에 개시된 실시예에 따르면, 시스템은 조작자에 의한 차량의 수동 조작 동안 제2 차량 운전 파라미터를 모니터링하고; 모니터링된 제2 차량 운전 파라미터와 관련된 데이터를 저장하는 프로세서를 포함하고, 프로세서는 모니터링된 제1 및 제2 차량 운전 파라미터의 저장된 데이터를 사용하여, 차량의 수동 조작에 후속하여 차량의 반자동 운전 조작을 구현하도록 구성된다.According to embodiments disclosed herein, the system monitors a second vehicle driving parameter during manual operation of the vehicle by an operator; and a processor for storing data related to the monitored second vehicle driving parameter, the processor using the stored data of the monitored first and second vehicle driving parameters to perform semi-automatic driving operation of the vehicle subsequent to manual operation of the vehicle. configured to implement
도 1a 및 도 1b는 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 원격 무선 조작이 가능한 자재 취급 차량의 예시이며;
도 2는 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 원격 무선 조작이 가능한 자재 취급 차량의 여러 구성요소의 개략도이며;
도 3은 차량의 가장 최근의 수동 조작 동안 제1 및 제2 운전 파라미터를 모니터링하고, 제1 및 제2 운전 파라미터에 기초하여, 본 명세서에서 도시되고 설명된 하나 이상의 실시예를 반자동 운전 조작의 구ㅎ혀을 제어하기 위한 예시적인 알고리즘의 흐름도를 도시하며;
도 4는 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 차량의 가장 최근의 수동 조작 동안 제1 방향으로의 차량의 가속도를 나타내는 제1 값을 계산하기 위한 예시적인 알고리즘의 흐름도를 도시하며;
도 5는 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 차량의 가장 최근의 수동 조작에 대응하는 제1 방향으로의 비실제 샘플 가속도 값을 포함하는 테이블을 도시하며;
도 6은 본 명세서에서 도시되고 설명된 하나 이상의 실시양태에 따른 wax-i의 샘플 값을 포함하는 테이블을 도시하며;
도 7은 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 차량의 가장 최근의 수동 조작 동안 제2 방향으로의 차량의 가속도를 나타내는 제2 값을 계산하기 위한 예시적인 알고리즘의 흐름도를 도시하며;
도 8은 본 명세서에 도시되고 설명된 하나 이상의 실시예에 따른 차량의 가장 최근의 수동 조작에 대응하는 제2 방향으로의 비실제 샘플 가속도 값을 포함하는 테이블을 도시하며;
도 9는 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 way-i의 샘플 값을 포함하는 테이블을 도시하며;
도 10은 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 차량의 이전의 수동 조작 동안 제1 및 제2 방향으로의 차량의 가속도를 나타내는 제1 및 제2 값에 기초하여 다음 반자동 운전 조작 동안 사용될 최대 가속도를 계산하기 위한 예시적인 알고리즘의 흐름도를 도시하며;
도 11은 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 제2 방향으로의의 최대 가속도(aywa-max)에 대한 3개의 개별 범위를 포함하는 룩업 테이블을 도시하며;
도 12는 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른, 픽업 조작의 시작을 검출하는 것에 기초하여 모니터링된 제1 차량 운전 파라미터와 관련된 저장된 데이터를 재설정하기 위한 예시적인 알고리즘의 흐름도를 도시하며;
도 13은 내지 도 15는 본 명세서에서 도시되고 설명된 하나 이상의 실시예에 따른 차량의 수동 조작 동안 픽업 조작의 시작을 나타내는 일련의 차량 조작을 도시한다.1A and 1B are examples of remote and wirelessly operable materials handling vehicles according to one or more embodiments shown and described herein;
2 is a schematic diagram of various components of a remote and wirelessly operable materials handling vehicle in accordance with one or more embodiments shown and described herein;
3 monitors first and second driving parameters during most recent manual manipulation of the vehicle and, based on the first and second driving parameters, implements one or more embodiments shown and described herein in the context of semi-automated driving manipulations. shows a flow diagram of an exemplary algorithm for controlling the tongue;
4 depicts a flow diagram of an example algorithm for calculating a first value representative of acceleration of a vehicle in a first direction during a most recent manual manipulation of the vehicle in accordance with one or more embodiments shown and described herein;
5 illustrates a table containing non-actual sampled acceleration values in a first direction corresponding to a most recent manual manipulation of a vehicle in accordance with one or more embodiments shown and described herein;
6 depicts a table including sample values of wa xi in accordance with one or more embodiments shown and described herein;
7 depicts a flow diagram of an example algorithm for calculating a second value representative of acceleration of a vehicle in a second direction during a most recent manual manipulation of the vehicle in accordance with one or more embodiments shown and described herein;
8 illustrates a table containing non-real sampled acceleration values in a second direction corresponding to a most recent manual manipulation of a vehicle in accordance with one or more embodiments shown and described herein;
9 illustrates a table containing sample values of wa yi in accordance with one or more embodiments shown and described herein;
10 illustrates during a subsequent semi-autonomous driving operation based on first and second values indicative of acceleration of the vehicle in first and second directions during prior manual operation of the vehicle in accordance with one or more embodiments shown and described herein. shows a flow diagram of an exemplary algorithm for calculating the maximum acceleration to be used;
11 shows a lookup table comprising three separate ranges for maximum acceleration in a second direction (a ywa-max ) in accordance with one or more embodiments shown and described herein;
12 depicts a flow diagram of an example algorithm for resetting stored data related to a monitored first vehicle operating parameter based on detecting the onset of a pick-up operation, in accordance with one or more embodiments shown and described herein; ;
13-15 illustrate a series of vehicle manipulations indicating the initiation of a pick-up maneuver during manual manipulation of the vehicle according to one or more embodiments shown and described herein.
예시된 실시예의 다음의 상세한 설명에서, 본 명세서의 일부를 형성하고 실시될 수 있는 특정 실시예가 제한이 아니라 예시로서 도시된 첨부 도면을 참조한다. 다른 실시예가 이용될 수 있고, 본 개시내용의 다양한 실시예의 사상 및 범위로부터 벗어남이 없이 변경이 만들어질 수 있음을 이해해야 한다.DETAILED DESCRIPTION In the following detailed description of illustrated embodiments, reference is made to the accompanying drawings, which form a part of this specification and are shown by way of illustration and not limitation of specific embodiments that may be practiced. It is to be understood that other embodiments may be utilized and changes may be made without departing from the spirit and scope of the various embodiments of the present disclosure.
저수준 오더 픽업 트럭low order pickup truck
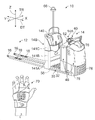
이제 도면, 특히 도 1a 및 도 1b를 참조하면, 낮은 수준의 오더 픽업 트럭(10)으로서 도시된 자재 취급 차량은 일반적으로 동력 유닛(14)으로부터 연장되는 화물 취급 조립체(12)를 포함한다. 화물 취급 조립체(12)는 한 쌍의 포크(16)를 포함하며, 각각의 포크(16)는 화물 지지 휠 조립체(18)를 가진다. 화물 취급 조립체(12)는 화물 백레스트, 가위형 상승 포크, 아우트리거 또는 별도의 높이 조절 포크와 같은 포크(16)의 예시된 배열에 추가로 또는 이 대신에 다른 화물 취급 특징부를 포함할 수 있다. 또한, 화물 취급 조립체(12)는 마스트, 화물 플랫폼, 수집 케이지 또는 포크(16)에 의해 운반되거나 트럭(10)에 의해 지지되어 운반되거나 또는 트럭, 즉 예인선 차량과 같이 밀리거나 견인되는 화물을 처리하기 위해 제공되는 기타 지지 구조물과 같은 화물 취급 특징부를 포함할 수 있다.Referring now to the drawings, and specifically to FIGS. 1A and 1B , a materials handling vehicle shown as a low
도시된 동력 유닛(14)은 동력 유닛(14)의 제1 단부 섹션(14A)(포크(16) 반대편)을 제2 단부 섹션(14B)(포크(16)에 근접함)으로부터 분할하는 스텝스루(step-through) 조작자 스테이션(30)을 포함한다. 스텝스루 조작자 스테이션(30)은 조작자가 트럭(10)을 운전하기 위해 및/또는 조작자가 트럭(10)의 다양한 특징부를 조작할 수 있는 위치를 제공하기 위해 서 있을 수 있는 플랫폼(32)을 제공한다.The
제1 작업 영역은 동력 유닛(14)의 제1 단부 섹션(14A)을 향해 제공되고, 조작자가 플랫폼(32)에 서 있을 때 트럭(10)을 운전하고 화물 취급 조립체(12)의 특징부들을 제어하기 위한 제어 영역(40)을 포함한다. 제1 단부 섹션(14A)은 배터리, 컨트롤러(103)(도 2 참조)를 포함하는 제어 전자 기기, 및 포크를 위한 견인 모터, 조향 모터 및 리프트 모터와 같은 모터(들)(도시되지 않음)을 수용하기 위한 구획(48)을 한정한다.A first work area is provided towards the
제한이 아닌 예시의 목적을 위해 도시된 바와 같이, 제어 영역(40)은 트럭(10)의 가속/제동 및 주행 방향을 제어하기 위해 그립, 버터플라이 스위치, 지동륜, 로커 스위치, 핸드 휠, 조향 틸러 등과 같은 제어부를 포함할 수 있는, 트럭(10)을 조향하기 위한 핸들(52)을 포함한다(도 1a 및 도 1b 참조). 예를 들어, 도시된 바와 같이, 스위치 그립 또는 주행 스위치(54)와 같은 제어부는 중앙 중립 위치로 스프링 편향되는 핸들(52)에 제공될 수 있다. 주행 스위치(54)를 전방 및 상향으로 회전시키는 것은 트럭(10)이 사전 한정된 최대 속도에 도달할 때까지 주행 스위치(54)의 회전량에 비례하는 가속도로 트럭(10)이 예를 들어 먼저 동력 유닛을 전진 이동시키게 하고, 사전 한정된 최대 속도 지점에서, 트럭(10)은 더 이상 더 높은 속도로 가속하는 것이 허용되지 않는다. 예를 들어, 주행 스위치(54)가 그립(54)에 대해 가능한 최대 회전 각도의 50%로 매우 빠르게 회전되면, 트럭(10)은 트럭이 트럭에 대해 가능한 최대 속도의 50%에 도달할 때까지 트럭에 대해 가능한 최대 가속도의 약 50%로 가속할 것이다. 가속도는 그립(54)의 회전 각도가 입력으로서 사용되고 가속도 맵에서 대응하는 가속도 값을 가지는, 메모리에 저장된 가속도 맵을 사용하여 결정될 수 있다는 것이 또한 고려된다. 그립 회전 각도에 대응하는 가속도 맵에서의 가속도 값은 주행 스위치 회전 각도에 비례하거나 또는 임의의 원하는 방식으로 변할 수 있다. 또한, 그립(54)의 회전 각도가 입력으로서 사용되고 속도 맵에 저장된 대응하는 최대 속도 값을 가지는, 메모리에 저장된 속도 맵이 있을 수 있다. 예를 들어, 그립(54)이 그립(54)에 대해 가능한 최대 각도의 50%로 회전될 때, 트럭은 최대 각도의 50%의 그립 각도에 대응하는 속도 맵에 저장된 최대 속도 값까지 가속도 맵에 저장된 대응하는 가속도 값에서 가속할 것이다. 유사하게, 주행 스위치(54)를 트럭(10)의 후방 및 하향을 향해 회전시키는 것은 트럭(10)이 주행 스위치(54)의 회전량에 대응하는 사전 한정된 최대 속도에 도달할 때까지 주행 스위치(54)의 회전량에 비례하는 가속도에서 트럭(10)이 예를 들어 포크를 먼저 후진 이동시키게 할 것이며, 사전 한정된 최대 속도 지점에서, 트럭(10)은 더 이상 더 높은 속도로 가속하는 것이 허용되지 않는다.As shown for purposes of illustration and not limitation,
존재 센서(58)는 트럭(10) 상의 조작자의 존재를 검출하기 위해 제공될 수 있다. 예를 들어, 존재 센서(58)는 플랫폼 바닥, 위 또는 아래에 위치될 수 있거나, 그렇지 않으면 조작자 스테이션(30) 주위에 제공될 수 있다. 도 1의 예시적인 트럭(10)에서, 존재 센서(58)는 플랫폼 바닥 아래에 위치된다는 것을 나타내는 점선으로 도시되어 있다. 이러한 배열 하에서, 존재 센서(58)는 부하 센서, 스위치 등을 포함할 수 있다. 대안으로서, 존재 센서(58)는 초음파, 용량성, 레이저 스캐너, 카메라 또는 다른 적절한 감지 기술을 사용하는 것과 같이 플랫폼 바닥 위에 구현될 수 있다. 존재 센서(58)의 활용은 본 명세서에서 더 상세히 설명될 것이다.A
안테나(66)는 동력 유닛(14)으로부터 수직으로 연장되고, 대응하는 무선 원격 제어 디바이스(70)로부터 제어 신호를 수신하기 위해 제공된다. 안테나(66)가 동력 유닛(14)의 구획(48) 내에 또는 트럭(10)의 어딘가에 제공될 수 있다는 것이 고려된다. 한 실시예에 따르면, 트럭(10)은, 동력 유닛(14)으로부터 수직으로 연장되고 대응하는 무선 원격 제어 디바이스(70)로부터 제어 신호를 수신하기 위해 제공되는 안테나(66)를 포함하는 기둥(도시되지 않음)을 포함할 수 있다. 기둥은 기둥과 조명이 조명탑을 한정하도록 상단에 있는 조명을 포함할 수 있다. 원격 제어 디바이스(70)는 조작자에 의해 착용되거나 그렇지 않으면 유지되는 전송기를 포함할 수 있다. 원격 제어 디바이스(70)는 원격 제어 디바이스(70)로 하여금 주행 요청을 지정하는 적어도 제1 유형의 신호를 트럭(10)에 무선으로 전송하게 하기 위해 조작자에 의해, 예를 들어 버튼 또는 다른 제어부를 누르는 것에 의해 수동으로 조작될 수 있다. 주행 요청은 본 명세서에서 더 상세히 설명되는 바와 같이, 해당 트럭(10)이 사전 결정된 양만큼 주행하도록 요청하는 명령이다.An
트럭(10)은 또한 트럭(10) 주위에, 예를 들어 동력 유닛(14)의 제1 단부 섹션을 향해 및/또는 동력 유닛(14)의 측면에 제공되는 하나 이상의 장애물 센서(76)를 포함한다. 장애물 센서(76)는 트럭(10) 상의 적어도 하나의 비접촉식 장애물 센서를 포함하며, 적어도 하나의 검출 구역을 한정하도록 조작 가능하다. 예를 들어, 적어도 하나의 검출 구역은 원격 제어 디바이스(70)로부터 무선으로 수신된 주행 요청에 응답하여 트럭(10)이 주행하고 있을 때 트럭(10)의 전진 주행 방향의 적어도 부분적으로 전방의 영역을 한정할 수 있다.The
장애물 센서(76)는 물체/장애물의 존재를 검출할 수 있거나 또는 동력 유닛(14)의 사전 한정된 검출 구역(들) 내에 물체/장애물의 존재를 검출하도록 분석될 수 있는 신호를 생성할 수 있는 초음파 센서, 광학 인식 디바이스, 적외선 센서, 레이저 스캐너 센서 등과 같은 임의의 적절한 근접 검출 기술을 포함할 수 있다.
실제로, 트럭(10)은 트럭을 조향하기 위해 틸러 핸들에 결합된 조향 틸러 아암을 포함하는 단부 제어 팔레트 트럭과 같은 다른 형식, 스타일 및 특징부로 구현될 수 있다. 유사하게, 원격 제어 디바이스(70)가 장갑형 구조(70)로서 예시되었을지라도, 원격 제어 디바이스(70)의 다양한 구현은 예를 들어 손가락 착용, 끈 또는 새시 장착 등을 포함하여 구현될 수 있다. 또한, 원격 제어 디바이스(70)를 포함하는 트럭, 원격 제어 시스템 및/또는 그 구성요소는 임의의 추가 및/또는 대안적인 특징부 또는 구현예를 포함할 수 있다.Indeed,
저수준 오더 픽업 트럭의 원격 조작을 위한 제어 시스템Control system for remote operation of low-order pickup trucks
도 2를 참조하면, 블록도는 원격 제어 명령을 트럭(10)과 통합하기 위한 제어 장치를 예시한다. 안테나(66)는 원격 제어 디바이스(70)에 의해 발부된 명령을 수신하기 위해 수신기(102)에 연결된다. 수신기(102)는 수신된 제어 신호를 컨트롤러(103)에 전달하고, 컨트롤러는 수신된 명령에 대한 적절한 응답을 구현하고, 그러므로 본 명세서에서 마스터 컨트롤러로서 지칭될 수 있다. 이와 관련하여, 컨트롤러(103)는 하드웨어로 구체화되고, 또한 소프트웨어(펌웨어, 상주 소프트웨어, 마이크로코드 등을 포함하는)를 실행할 수 있다. 또한, 실시예는 컴퓨터 판독 가능 프로그램 코드가 구현된 하나 이상의 컴퓨터 판독 가능 매체(들)에 구체화된 컴퓨터 프로그램 제품의 형태를 취할 수 있다.Referring to FIG. 2 , a block diagram illustrates a control device for integrating remote control commands with the
따라서, 컨트롤러(103)는 프로그램 코드를 저장 및/또는 실행하기에 적합한 데이터 처리 시스템을 적어도 부분적으로 한정하는 전자 기기 컨트롤러를 포함할 수 있고, 예를 들어 시스템 버스 또는 기타 적절한 연결을 통해 메모리 요소에 직접 또는 간접적으로 연결된 적어도 하나의 프로세서를 포함할 수 있다. 메모리 요소는 프로그램 코드의 실제 실행 동안 이용되는 로컬 메모리, 마이크로컨트롤러 또는 주문형 집적 회로(ASIC), 프로그래밍 가능한 게이트 어레이 또는 기타 재구성 가능한 처리 디바이스 등에 통합되는 메모리를 포함할 수 있다. 적어도 하나의 프로세서는 실행 가능한 명령어(하나 이상의 메모리 요소로부터의 프로그램 코드 등)를 수신하고 실행하도록 조작 가능한 모든 처리 구성요소를 포함한다. 적어도 하나의 프로세서는, 입력 데이터를 수신하고 컴퓨터 명령을 통해 해당 데이터를 처리하고, 출력 데이터를 생성하는 임의의 종류의 디바이스를 포함할 수 있다. 이러한 프로세서는 마이크로컨트롤러, 휴대용 디바이스, 랩탑 또는 노트북 컴퓨터, 데스크탑 컴퓨터, 마이크로컴퓨터, 디지털 신호 프로세서(DSP), 메인프레임, 서버, 휴대폰, 개인 정보 단말기, 기타 프로그래밍 가능한 컴퓨터 디바이스, 또는 이것들의 임의의 조합일 수 있다. 이러한 프로세서는 필드 프로그램 가능 게이트 어레이(FPGA)와 같은 프로그램 가능 논리 디바이스를 사용하여 구현되거나, 대안적으로 주문형 집적 회로(ASIC) 또는 유사한 디바이스로 실현될 수 있다. "프로세서"라는 용어는 또한 2개 이상의 상기 언급된 디바이스, 예를 들어 2개 이상의 마이크로컨트롤러의 조합을 포함하도록 의도된다.Accordingly, the
예를 들어 원격 제어 디바이스(70)의 무선 전송기 및 대응하는 안테나(66) 및 수신기(102)를 통해 무선으로 수신된 명령에 응답하여 컨트롤러(103)에 의해 구현된 응답은 구현되고 있는 논리에 의존하여 하나 이상의 조작 또는 비조작을 포함할 수 있다. 긍정적인 조치는 트럭(10)의 하나 이상의 구성요소를 제어, 조정 또는 다른 방식으로 영향을 미치는 것을 포함할 수 있다. 컨트롤러(103)는 또한 원격 제어 디바이스(70)로부터 수신된 명령에 응답하여 적절한 조작을 결정하기 위해 다른 입력(104)으로부터, 예를 들어 존재 센서(58), 장애물 센서(76), 스위치, 화물 센서, 인코더 및 트럭(10)에 이용 가능한 다른 디바이스/특징부와 같은 소스로부터 정보를 수신할 수 있다. 센서(58, 76) 등은 입력(104)을 통해 또는 제어 영역 네트워크(CAN) 버스(110)와 같은 적절한 트럭 네트워크를 통해 컨트롤러(103)에 연결될 수 있다.The response implemented by the
컨트롤러(103)로의 추가 입력은 포크(16)와 포크(16) 상의 임의의 화물의 조합된 중량을 감지하는 종래의 압력 트랜스듀서(도 2 참조)와 같은 화물 센서(LS)에 의해 생성된 중량 신호일 수 있다. 화물 센서(LS)는 포크(16)의 리프트를 실행하기 위해 유압 시스템에 통합될 수 있다. 포크(16)의 중량과 포크(16)의 화물(L)의 조합된 중량으로부터 포크(16)의 중량(알려진 상수 값)을 빼는 것에 의해, 컨트롤러(103)는 포크(16) 상의 화물(L)의 중량을 결정하며, 조합 중량이 화물 센서(LS)로부터의 중량 신호에 의해 정의된다. 대안적으로, 유압 시스템에 통합된 압력 트랜스듀서(LS) 대신에, 하나 이상의 중량 감지 셀(도시되지 않음)은 포크(16)에 통합되어, 포크(16) 상의 화물(L)을 감지하고 컨트롤러(103)에 대응하는 화물 감지 신호를 생성할 수 있다.An additional input to
컨트롤러(103)는 또한 다음과 같이 트럭(10)이 주행하는 바닥 표면과 같은 지면에 대한 포크(16)를 포함하는 화물 취급 조립체(12)의 수직 위치, 즉 높이를 결정할 수 있다. 하나 이상의 높이 센서 또는 스위치는 동력 유닛(14)의 제2 단부 섹션(14B)에 제공될 수 있으며, 이는 포크(16)를 포함하는 화물 취급 조립체(12)가 지면 및/또는 동력 유닛(14)의 제1 단부 섹션(14A) 상의 더 낮은 지점에 대해 수직으로 상승될 때를 감지한다. 예를 들어, 제1, 제2 및 제3 스위치(도시되지 않음)는 도 1a에서 점선(141A, 141B 및 141C)으로 표시된 제1, 제2 및 제3 수직 위치에서 제2 단부 섹션(14B) 내에 제공될 수 있으며, 스위치들은 화물 취급 조립체(12)가 상승함에 따라 작동된다. 화물 취급 조립체(12)의 가장 낮은 위치는 또한 0 중량을 나타내는 화물 센서(LS)를 통해 결정될 수 있다.The
한 실시예에서, 컨트롤러(103)는 1, 2 또는 3개의 축을 따라서 트럭(10)의 물리적 가속도를 측정할 수 있는 하나 이상의 가속도계를 포함할 수 있다. 가속도계(1103)는 컨트롤러(103)로부터 분리될 수 있지만, 컨트롤러(103)에 가속도 신호를 생성하고 전송하기 위해 컨트롤러(103)에 연결되고 이와 통신할 수 있다는 것이 또한 고려된다(도 2 참조). 예를 들어, 가속도계(1103)는 도 1의 실시예에서, X 축이 포크(16)와 대체로 평행할 수 있는 축(X)과 동일선상에 있는 트럭(10)의 주행의 방향(DT)(여기에서 제1 주행 방향으로서 또한 지칭됨)에서의 트럭(10)의 가속도를 측정할 수 있다. 주행의 방향(DT) 또는 제1 주행 방향은 트럭(10)이 이동하는 방향으로서, 전진 또는 동력 유닛의 제1 방향 또는 후진 또는 포크 제1 방향으로 한정될 수 있다. 가속도계(1103)는 트럭(10)의 주행의 방향(DT)에 대해 일반적으로 90°인 가로 방향(TR)(여기에서 제2 방향으로서 또한 지칭됨)을 따르는 트럭(10)의 가속도를 추가로 측정할 수 있으며, 도 1의 실시예에서 가로 방향(TR)은 축(Y)과 동일선상에 있다. 가속도계(1103)는 또한 주행의 방향(DT) 및 가로 방향(TR) 모두에 횡단하는 추가 방향으로 트럭(10)의 가속도를 측정할 수 있으며, 추가 방향은 일반적으로 축(Z)과 동일선상에 있다.In one embodiment, the
예시적인 배열에서, 원격 제어 디바이스(70)는 주행 명령과 같은 제1 유형 신호를 나타내는 제어 신호를 트럭(10)의 수신기(102)에 무선으로 전송하도록 조작한다. 주행 명령은 "주행 신호", "주행 요청" 또는 "고 신호(go signal)"로서 또한 지칭된다. 주행 요청은 예를 들어 트럭(10)이 제한된 주행 거리만큼 전형적으로 동력 유닛의 제1 방향으로만 전진하거나 조깅하게 하도록 트럭(10)이 사전 결정된 양만큼 이동하라는 요청을 개시하는데 사용된다. 제한된 주행 거리는 대략적인 주행 거리, 주행 시간 또는 기타 측정에 의해 한정될 수 있다. 한 구현예에서, 트럭은 조작자가 사전 결정된 기간 양, 예를 들어 20초보다 오래 지속되지 않는 주행 요청을 제공하는 한 계속해서 운전될 수 있다. 조작자가 더 이상 주행 요청을 제공하지 않은 후에 또는 주행 요청이 사전 결정된 기간 이상 제공되었으면, 트럭 이동에 영향을 미치는 견인 모터는 더 이상 활성화되지 않고, 트럭이 정지하기 위해 타력 주행하는 것이 허용된다. 트럭(10)은 일반적으로 직선 방향으로 또는 이전에 결정된 방향을 따라서 주행하도록 제어될 수 있다.In an exemplary arrangement, the
그러므로, 수신기(102)에 의해 수신된 제1 유형 신호는 컨트롤러(103)로 통신된다. 주행 신호가 유효한 주행 신호이고 현재 차량 상태가 적절하다고 컨트롤러(103)가 결정하면(아래에서 더 자세히 설명됨), 컨트롤러(103)는 특정 트럭(10)의 적절한 제어 구성에 신호를 보내, 트럭(10)을 전진시키고 그런 다음 정지시킨다. 트럭(10)을 정지시키는 것은, 예를 들어 트럭(10)이 정지하기 위해 타력 주행하는 것을 허용하거나 또는 트럭(10)이 정지하도록 제동되게 하도록 제동 작동을 개시하는 것에 의해 구현될 수 있다.Therefore, the first type signal received by the
예로서, 컨트롤러(103)는 트럭(10)의 견인 모터 컨트롤러(106)로서 예시된 견인 제어 시스템에 통신 가능하게 연결될 수 있다. 견인 모터 컨트롤러(106)는 트럭의 적어도 하나의 종동 휠(108)을 구동하는 견인 모터(107)에 연결된다. 컨트롤러(103)는 원격 제어 디바이스(70)로부터 주행 요청을 수신하는 것에 응답하여 트럭(10)의 속도를 가속, 감속, 조정 및/또는 제한하기 위해 견인 모터 컨트롤러(106)와 통신할 수 있다. 컨트롤러(103)는 또한 트럭(10)의 적어도 하나의 조향 휠(108)을 조향하는 조향 모터(114)에 연결되는 조향 컨트롤러(112)에 통신 가능하게 연결될 수 있으며, 조향 휠은 종동 휠과 상이할 수 있다. 이와 관련하여, 트럭(10)은 원격 제어 디바이스(70)로부터의 주행 요청을 수신하는 것에 응답하여 의도된 경로를 주행하거나 의도된 방향을 유지하도록 컨트롤러(103)에 의해 제어될 수 있다.As an example,
컨트롤러(103)는 다음과 같이 트럭(10)의 이동하는지 또는 정지되는지의 여부 및 트럭(10)이 주행한 선형 거리를 결정할 수 있다. 먼저, 컨트롤러(103)는 가속도계(1103)에 의해 생성된 신호를 사용하고 한번 적분하는 것에 의해 트럭(10)이 이동하는지 또는 정지되는지의 여부를 결정할 수 있다. 가속도계(1103)로부터의 현재 값이 0보다 큰지를 결정하는 것에 의해 트럭(10)이 이동하고 있는지를 결정하는 것이 또한 가능하다. 컨트롤러(103)는 또한 가속도계(1103)에 의해 생성되고 2번 적분된 신호를 사용하여 트럭(10)이 주행한 선형 거리를 결정할 수 있다. 대안적으로, 견인 컨트롤러(106)는 견인 모터(107) 내의 인코더에 의해 생성된 피드백 신호를 수신할 수 있고, 이러한 신호로부터 컨트롤러(103)에 대한 모터 각속도 신호를 생성할 수 있다. 컨트롤러(103)는 모터 각속도 신호로부터 차량이 이동하고 있는지 또는 정지되는지를 결정할 수 있다. 컨트롤러(103)는 또한 모터 각속도 신호를 트럭(10)의 실제 선형 속도로 변환할 수 있다. 예를 들어, 속도 신호가 견인 모터(107)의 각속도를 포함하면, 컨트롤러(103)는 a) 견인 모터(107)와 차량의 종동 휠 사이의 기어비, 및 b) 종동 휠의 원주에 기초한 차량(10)의 실제 선형 속도에 그 값을 비교할 수 있다. 차량의 선형 속도는 트럭(10)이 주행한 거리를 결정하기 위해 (적분을 통해) 사용될 수 있다.The
또 다른 예시적인 예로서, 컨트롤러(103)는 또한 원격 제어 디바이스(70)로부터의 주행 요청을 수신하는 것에 응답하여 트럭(10)의 속도를 감속, 정지 또는 제어하기 위해 견인 컨트롤러(106)와 통신할 수 있다. 제동은 회생 제동을 유발하는 것에 의해 또는 견인 모터(107)에 연결된 기계적 브레이크(117)를 활성화하는 것에 의해 견인 컨트롤러(106)에 의해 실행될 수 있다(도 2 참조). 또한, 컨트롤러(103)는 적용 가능한 경우에 원격 주행 기능을 구현하는 것에 응답하여 원하는 조작을 구현하기 위해 메인 접촉기(118) 및/또는 트럭(10)과 관련된 다른 출력(119)과 같은 다른 차량 특징부들에 통신 가능하게 연결될 수 있다.As another illustrative example,
실시예에 따르면, 컨트롤러(103)는 관련된 원격 제어 디바이스(70)로부터의 주행 명령을 수신하는 것에 응답하여 원격 제어 하에 트럭(10)을 조작하기 위해 수신기(102) 및 견인 컨트롤러(106)와 통신할 수 있다.According to an embodiment, the
대응하게, 트럭(10)이 원격 무선 제어에 의해 수신된 명령에 응답하여 움직이고 있다면, 컨트롤러(103)는 예를 들어 트럭(10)을 정지시키거나, 트럭(10)의 조향 각도를 변경하거나, 또는 다른 조치를 취하는 것에 의해 원격 제어 조작을 동적으로 변경, 제어, 조정 또는 달리 영향을 미칠 수 있다. 따라서, 특정 차량 특징부, 하나 이상의 차량 특징부의 상태/조건, 차량 환경 등은 컨트롤러(103)가 원격 제어 디바이스(70)로부터의 주행 요청에 응답하는 방식에 영향을 미칠 수 있다.Correspondingly, if the
컨트롤러(103)는 예를 들어 환경적 또는 작동적 요인(들)과 관련된 사전 결정된 조건(들)에 의존하여 수신된 주행 요청을 승인하는 것을 거부할 수 있다. 예를 들어, 컨트롤러(103)는 센서(58, 76) 중 하나 이상으로부터 획득된 정보에 기초하여 그렇지 않으면 유효한 주행 요청을 무시할 수 있다. 예시로서, 실시예에 따르면, 컨트롤러(103)는 원격 제어 디바이스(70)로부터의 주행 명령에 응답할지 여부를 결정할 때 조작자가 트럭(10)에 있는지 여부와 같은 인자를 선택적으로 고려할 수 있다. 위에서 언급된 바와 같이, 트럭(10)은 조작자가 트럭(10)에 위치하는지 여부를 검출하기 위한 적어도 하나의 존재 센서(58)를 포함할 수 있다. 이와 관련하여, 컨트롤러(103)는 트럭(10)에 조작자가 없다고 존재 센서(들)(58)가 지정할 때 원격 제어 하에서 트럭(10)을 조작하라는 주행 요청에 응답하도록 추가로 구성될 수 있다. 그러므로, 이러한 구현예에서, 트럭(10)은 조작자가 트럭(10)에서 물리적으로 떨어져 있지 않는 한 전송기로부터의 무선 명령에 응답하여 조작될 수 없다. 유사하게, 물체 센서(76)가 조작자를 포함하여 물체가 트럭(10)에 인접 및/또는 근접한 것을 검출하면, 컨트롤러(103)는 전송기(70)로부터의 주행 요청을 승인하는 것을 거부할 수 있다. 따라서, 예시적인 구현예에서, 조작자는 트럭(10)의 제한된 범위 내에, 예를 들어, 무선 통신 범위(트럭(10)로부터 조작자의 최대 거리를 설정하도록 제한될 수 있는)에 있도록 트럭(10)에 충분히 가까워야만 한다. 다른 배열이 대안적으로 구현될 수 있다.The
임의의 다른 수의 합리적인 조건, 요인, 파라미터 또는 기타 고려사항이 또한/대안적으로 컨트롤러(103)에 의해 구현되어, 전송기로부터 수신된 신호에 응답하여 조작을 해석하고 취할 수 있다.Any other number of reasonable conditions, factors, parameters or other considerations may also/alternatively be implemented by the
주행 요청의 승인시에, 컨트롤러(103)는 제한된 양만큼 트럭(10)을 전진시키기 위해, 예를 들어, 직접적으로 또는 간접적으로, 예를 들어 이용되는 경우 CAN 버스(110)와 같은 버스를 통해 견인 모터 컨트롤러(106)와 상호 작용한다. 특정 구현예에 의존하여, 컨트롤러(103)는 견인 모터 컨트롤러(106) 및 선택적으로 조향 컨트롤러(112)와 상호 작용하여, 트럭(10)을 사전 결정된 거리만큼 전진시킬 수 있다. 대안적으로, 컨트롤러(103)는 견인 모터 컨트롤러(106) 및 선택적으로 조향 컨트롤러(112)와 상호 작용하여, 원격 제어 디바이스(70) 상의 주행 제어의 검출 및 유지된 조작에 응답하여 일정 기간 동안 트럭(10)을 전진시킬 수 있다. 또 다른 예시적인 예로서, 트럭(10)은 주행 제어 신호가 수신되는 한 조깅하도록 구성될 수 있다. 또한, 컨트롤러(103)는 원격 제어 디바이스(70)에서의 대응하는 제어의 유지된 작동의 검출과 상관없이 사전 결정된 기간 또는 주행 거리를 초과하는 것과 같은 사전 결정된 이벤트에 기초하여 트럭(10)의 주행을 "타임 아웃"하고 정지시키도록 구성될 수 있다.Upon approval of the drive request, the
원격 제어 디바이스(70)는 또한 트럭(10)이 제동 및/또는 그렇지 않으면 정지해야 함을 나타내는 "정지 신호"와 같은 제2 유형 신호를 전송하도록 작동할 수 있다. 제2 유형 신호는 또한 예를 들어 주행 명령에 응답하여 원격 제어 하에서 "주행" 명령을 구현한 후, 예를 들어 트럭(10)이 사전 결정된 거리를 주행한 후, 사전 결정된 기간 동안 주행한 후 암시될 수 있다. 무선으로 수신된 신호가 정지 신호라고 컨트롤러(103)가 결정하면, 컨트롤러(103)는 견인 컨트롤러(106) 및/또는 다른 트럭 구성요소에 신호를 전송하여 트럭(10)을 정지시킨다. 정지 신호에 대한 대안으로서, 제2 유형 신호는 트럭(10)이 타력 주행하여 결국에는 정지하도록 늦춰야 함을 지정하는 "타력 주행 신호(coast signal)" 또는 "제어된 감속 신호"를 포함할 수 있다.The
트럭(10)을 완전히 정지시키는데 걸리는 시간은 예를 들어 의도된 적용, 환경 조건, 특정 트럭(10)의 능력, 트럭(10)의 화물 및 기타 유사한 인자에 따라 달라질 수 있다. 예를 들어, 적절한 조그 조작을 완료한 후, 트럭(10)이 천천히 정지하도록 트럭(10)이 정지하기 전에 일정 거리를 "타력 주행"하는 것을 허용하는 것이 바람직할 수 있다. 이것은 트럭(10)을 정지시키기 위해 느리게 하도록 회생 제동을 이용하는 것에 의해 달성될 수 있다. 대안적으로, 제동 조작은 정지 조작의 개시 후에 트럭(10)에 사전 결정된 범위의 추가 주행을 허용하기 위해 사전 결정된 지연 시간 후에 적용될 수 있다. 또한, 예를 들어 물체가 트럭(10)의 주행 경로에서 검출되거나 또는 즉각적인 정지가 성공적인 조그 조작 후에 필요하면 트럭(10)을 비교적 더 빨리 정지시키는 것이 바람직할 수 있다. 예를 들어, 컨트롤러는 제동 조작에 사전 결정된 토크를 인가할 수 있다. 이러한 조건 하에서, 컨트롤러(103)는 견인 컨트롤러(106)가 회생 제동을 통해 제동하거나 기계식 브레이크(117)를 적용하여 트럭(10)을 정지시키도록 지시할 수 있다.The time it takes to bring the
차량의 원격 제어 조작 동안 사용하기 위한 차량 운전 파라미터(들)의 계산Calculation of vehicle driving parameter(s) for use during remote control operation of the vehicle
위에서 언급된 바와 같이, 조작자는 트럭(10)을 수동으로 조작하기 위해, 즉 수동 모드에서 트럭을 조작하기 위해 조작자 스테이션(30) 내의 플랫폼(32)에 서 있을 수 있다. 조작자는 핸들(52)을 통해 트럭(10)을 조향할 수 있고(도 1b 참조), 나아가, 주행 스위치(54)의 회전을 통해 트럭(10)이 가속되게 할 수 있다. 또한 위에서 언급된 바와 같이, 주행 스위치(54)의 전방 및 상향 회전은 주행 스위치(54)의 회전량에 비례할 수 있는 가속도로 트럭(10)이 예를 들어 동력 유닛을 먼저 전진 이동시키게 한다. 유사하게, 주행 스위치(54)를 트럭(10)의 후방 및 하향으로 회전시키는 것은 주행 스위치(54)의 회전량에 비례할 수 있는 가속도로 트럭(10)이 예를 들어 포크를 먼저 후진으로 이동시키게 한다. 트럭(10)이 포크 제1 방향으로 이동하는 동안 주행 스위치(54)의 전방 및 상향 회전은 트럭(10)이 제동되게 할 것이다. 또한, 트럭(10)이 동력 유닛 제1 방향으로 이동하는 동안 주행 스위치(54)의 후방 및 하향 회전은 트럭(10)이 제동되게 할 것이다. 따라서, "조작자에 의한 차량의 수동 조작"은 조작자가 조작자 스테이션(30) 내의 플랫폼(32)에 서서 핸들(52)을 통해 트럭(10)을 조향하고, 주행 스위치(54)의 회전을 통해 트럭을 가속/제동(즉, 회생 제동)할 때 발생한다. 별도의 브레이크 스위치, 예를 들어 도 1b의 스위치(41)는 트럭(10)의 회생 제동을 유발하기 위해 조작자에 의해 사용될 수 있다. 위에서 언급된 바와 같이, 제동은 또한 기계식 브레이크(117)를 통해 수행될 수 있다.As noted above, an operator may stand on the platform 32 within the operator station 30 to manually operate the
또한 위에서 언급된 바와 같이, 컨트롤러(103)는 수신기(102) 및 견인 컨트롤러(106)와 통신하여, 관련된 원격 제어 디바이스(70)로부터의 주행 명령을 수신하는 것에 응답하여 원격 제어 하에서 트럭(10)을 조작할 수 있다. 주행 요청은 예를 들어, 트럭(10)이 제1 주행 방향, 즉 동력 유닛 제1 방향으로 제한된 주행 거리만큼 전진하거나 조깅하게 하도록 트럭(10)이 사전 결정된 양만큼 주행하라는 요청을 개시하도록 사용된다. 따라서, 조작자는 조작자가 트럭에 물리적으로 존재하지 않지만 픽업 조작 동안과 같이 트럭(10) 가까이에서 걸을 때, 즉 조작자가 트럭(10)에서 떨어져 있고 원격 제어 하에 트럭(10)을 조작하기 위해 원격 제어 디바이스(70)를 사용하여 창고 보관 구역으로부터 픽업 품목을 픽업하거나 수집하여 트럭(10)에 적재할 때 원격 제어 모드에서 트럭(10)을 조작할 수 있다. 원격 제어 모드에서 트럭(10)을 조작하는 것은 또한 본 명세서에서 트럭(10)의 "반자동" 작동으로서 지칭된다.Also as noted above, the
조작자가 창고 내에서 픽업 조작 동안과 같이 트럭(10)을 사용할 때, 조작자는 일반적으로 수동 모드와 원격 제어 모드 모두에서 트럭(10)을 사용한다. When an operator uses the
이전에, 원격 제어 모드에서 차량의 조작 동안 차량의 최대 가속도를 제한하기 위해, 차량 컨트롤러는 사전 한정된 고정 차량 파라미터, 예를 들어 최대 가속도를 저장했다. 이러한 사전 한정된 최대 가속 한계는 예를 들어 불안정한 화물을 한정하는 높은 스택의 물품/패키지가 트럭에 적재되면 때때로 너무 높았으며, 안정한 화물을 한정하는 짧은 스택의 물품/패키지가 트럭에 적재되면 너무 낮았다.Previously, in order to limit the maximum acceleration of the vehicle during operation of the vehicle in the remote control mode, the vehicle controller stored a predefined fixed vehicle parameter, for example the maximum acceleration. This predefined maximum acceleration limit was sometimes too high when the truck was loaded with high stacks of goods/packages confining unstable cargo, for example, and too low if short stacks of goods/packages were loaded on the truck.
본 개시내용의 실시예에 따르면, 컨트롤러(103)는 트럭(10)의 가장 최근의 수동 조작 동안 하나 이상의 운전 파라미터를 모니터링하며, 하나 이상의 운전 파라미터는 조작자의 운전 거동 또는 특성에 대응한다. 하나 이상의 운전 파라미터가 높으면, 이는 조작자가 트럭(10)을 활발하게 운전하는 것에 대응할 수 있다. 하나 이상의 운전 파라미터가 낮으면, 이는 조작자가 트럭(10)을 보수적으로 또는 조심스럽게 운전하는 것에 대응할 수 있다. 트럭(10)의 원격 제어 조작 동안 차량 제어를 위해 하나 이상의 사전 한정된 고정 운전 파라미터를 사용하는 대신, 컨트롤러(103)는 트럭(10)의 가장 최근의 수동 조작 동안 모니터링되는 하나 이상의 운전 파라미터에 기초하여 트럭(10)의 다음 원격 제어 조작 동안 사용하기 위한 하나 이상의 적응성 운전 파라미터를 계산한다. 트럭(10)의 다음 원격 제어 조작 동안 사용하기 위해 계산된 하나 이상의 운전 파라미터가 조작자의 최근 운전 거동, 즉 트럭(10)의 가장 최근의 수동 모드 조작 동안 모니터링된 하나 이상의 운전 파라미터에 기초하기 때문에, 컨트롤러(103)는 트럭(10)의 다음 원격 제어 조작 동안 사용될 하나 이상의 운전 파라미터를 보다 정확하고 적절하게 한정하여서, 하나 이상의 운전 파라미터가 조작자의 가장 최근 운전 거동과 더 밀접하게 일치하는 것으로 믿어진다.According to an embodiment of the present disclosure, the
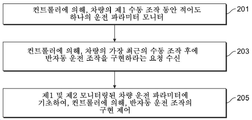
트럭(10)이 다음 원격 제어 모드에서 작동될 때 컨트롤러(103)에 의해 사용될 대응하는 적응형 운전 파라미터, 예를 들어 최대 가속도를 계산하기 위해 트럭(10)의 가장 최근의 수동 조작 동안 제1 및 제2 운전 파라미터, 예를 들어 제1 및 제2 방향의 가속도를 모니터링하기 위한, 컨트롤러(103)에 대한 예시적인 제어 알고리즘 또는 프로세스가 도 3에 도시되어 있다.During the most recent manual operation of the
단계 201에서, 컨트롤러(103)는 차량의 가장 최근의 수동 조작 동안, 차량 또는 트럭(10)의 제1 주행 방향에 대응하는 제1 운전 파라미터, 예를 들어, 제1 가속도 및 제1 주행 방향과 다른 제2 방향에 대응하는 제2 파라미터, 예를 들어 제2 가속도를 동시에 모니터링한다. 도시된 실시예에서, 제1 주행 방향은 트럭(10)의 주행의 방향(DT)에 의해 한정될 수 있고(도 1 참조), 제2 방향은 가로 방향(TR)에 의해 한정될 수 있다. 따라서, 제1 및 제2 방향은 서로에 대해 실질적으로 직교할 수 있다. 컨트롤러(103)는 조작자에 의한 차량의 이전의 수동 조작에 대응하는 모니터링된 제1 및 제2 차량 운전 파라미터에 관한 임의의 저장된 데이터, 즉 제1 저장된 데이터를, 차량의 가장 최근의 수동 조작 동안 모니터링된 제1 및 제2 차량 운전 파라미터에 관한 최근의 데이터, 즉 제2 데이터로 대체하며, 최근의 데이터는 차량의 이전 수동 조작으로부터 이전에 저장된 데이터를 사용하거나 이에 기초하여 계산되지 않는다. 차량은 차량의 이전 수동 조작 후 및 차량의 가장 최근의 수동 조작 전에 원격 제어 모드로 조작되었을 수 있다.In
조작자는 트럭(10)이 주행하고 있는 경로의 곡률, 트럭(10)의 회전 각도, 현재 바닥 상태, 예를 들어 젖거나 미끄러운 바닥 표면 또는 건조/미끄럽지 않은 바닥 표면, 및/또는 트럭(10)에 의해 운반되는 화물의 중량와 높이와 같은 인자에 기초하여 트럭(10)의 가속도를 변경할 수 있다. 예를 들어, 트럭(10)이 건조/미끄럽지 않은 바닥 표면에서 길고 직선인 경로에 걸쳐 화물없이 또는 안정한 화물, 예를 들어 낮은 높이의 화물을 가지고 주행하면, 제1 가속도에 대한 값은 높을 수 있다. 그러나, 트럭(10)이 불안정한 화물, 예를 들어 높은 높이를 가지는 화물을 가지면, 화물은 트럭(10)이 급가속을 하면 이동하거나 트럭(10)으로부터 떨어지며, 제1 가속도에 대한 값은 낮을 수 있다. 또한, 트럭(10)이 예각으로 선회되어 고속으로 주행하면, 제1 가속도에 대한 값이 높을 수 있고 제2 가속도에 대한 값도 또한 높을 수 있다.The operator can determine the curvature of the path the
203단계에서, 컨트롤러(103)는 차량 또는 트럭(10)의 가장 최근의 수동 조작 후에, 반자동 운전 조작을 구현하라는 요청, 즉 원격 제어 모드에서 트럭(10)의 조작하라는 요청을 수신한다. 예시된 실시예에서 그리고 위에서 논의된 바와 같이, 컨트롤러(103)는 원격 제어 디바이스(70)로부터 주행 요청을 수신할 수 있다. 이러한 주행 요청은 제1 반자동 운전 조작을 구현하기 위한 요청을 한정할 수 있다.In
단계 205에서, 컨트롤러(103)는 트럭(10)의 가장 최근의 수동 조작 동안 모니터링된 제1 및 제2 차량 운전 파라미터에 기초하여, 트럭(10)의 반자동 운전 조작을 구현한다. 컨트롤러(103)는, 차량의 가장 최근의 수동 조작 동안 모니터링된 제1 및 제2 차량 운전 파라미터에 관한 최근 데이터에 기초하여, 제1 방향으로의 트럭(10)의 가속도를 나타내는 제1 값 및 제2 방향으로의 트럭(10)의 가속도를 나타내는 제2 값을 계산한다. 컨트롤러(103)는 제2 값이 사전 한정된 범위를 벗어나면 제2 방향으로의 가속도를 나타내는 제2 값에 기초하여 제1 방향으로의 가속도를 나타내는 제1 값을 수정한다. 제2 값이 사전 한정된 범위 밖 또는 범위 내인지의 여부에 기초하여 수정되는지 여부에 관계없이, 제1 값은 트럭(10)의 반자동 운전 조작 동안 초과될 수 없는 최대 가속도를 한정한다.At
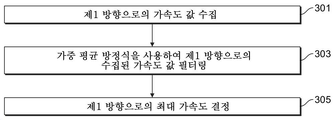
컨트롤러(103)에 대한 예시적인 제어 알고리즘, 또는 프로세서는 트럭(10)의 가장 최근의 수동 조작 동안 제1 방향으로의 트럭(10)의 가속도를 나타내는 제1 값을 계산하기 위하여 도 4에 도시되어 있다. 단계 301에서, 가속도계(1103)로부터 제1 방향으로의 일련의 가속도 값은 차량의 가장 최근의 수동 조작 동안 수집되고 컨트롤러(103)에 의해 메모리에 저장되며, 여기에서 제1 방향은 트럭(10)의 주행의 방향(DT)으로 이동하는 방향에 의해 한정한다. 주행 스위치(54)의 전진 및 상향 회전은 트럭(10)으로 하여금, 주행 스위치(54)의 회전량에 비례하는 동력 유닛 제1 방향으로 양의 가속도로 예를 들어 동력 유닛을 먼저 전진 이동시키게 한다. 유사하게, 주행 스위치(54)를 트럭(10)의 후방 및 하향 회전은 트럭(10)으로 하여금, 주행 스위치(54)의 회전량에 비례하는 포크 제1 방향의 양의 가속도로 예를 들어 포크를 먼저 후진 이동시키게 할 것이다. 둘 모두 트럭(10)의 주행의 방향(DT)에 의해 한정된 바와 같이 제1 방향으로 간주되는 동력 유닛 제1 방향 또는 포크 제1 방향으로 트럭(10)이 가속함에 따라서, 가속도계(1103)는 컨트롤러(103)에 의해 메모리에 저장되는 일련의 양의 가속도 값을 생성한다. 트럭(10)이 포크 제1 방향으로 이동하는 동안 주행 스위치(54)의 전방 및 상향 회전은 트럭(10)이 감속되게 하거나 제동되게 할 것이다. 또한, 트럭(10)이 동력 유닛 제1 방향으로 이동하는 동안 주행 스위치(54)의 후방 및 하향 회전은 트럭(10)이 감속되게 하거나 또는 제동되게 할 것이다. 제1 실시예에 따르면, 제동 동안 발생하는 것과 같은 음의 가속도 값은 차량의 가장 최근의 수동 조작 동안 제1 방향으로의 트럭(10)의 가속도를 나타내는 제1 값을 계산하는데 사용하기 위해 수집되지 않는다.An exemplary control algorithm, or processor, for the
주행 스위치(54)의 전방 및 상향 회전은 트럭(10)으로 하여금, 전방으로, 즉 동력 유닛 제1 방향으로 양의 가속도(속도가 증가하고 있음)로 동력 유닛을 먼저 이동시키게 하는 반면, 가속도계는 이러한 이동이 양의 가속도를 포함하는 것으로 결정할 수 있다. 가속도계는 또한 트럭(10)이 동력 유닛 제1 방향으로 이동하는 동안 제동(속도가 감소하고 있음)이 감속 또는 음의 가속도를 포함한다고 결정할 수 있다. 또한, 주행 스위치(54)의 후방 및 하향 회전은 트럭(10)으로 하여금 포크 제1 방향으로 양의 가속도(속도가 증가함)로 예를 들어 포크를 먼저 역방향으로 이동시키게 하지만, 가속도계는 속도가 포크의 제1 방향으로 증가하는 경우 이러한 이동이 음의 가속도를 포함한다고 결정할 수 있다. 가속도계는 또한 트럭(10)이 포크 제1 방향으로 주행하는 동안 제동(속도가 감소하고 있음)이 양의 가속도를 포함한다고 결정할 수 있다. 그러나, 다음 반자동 운전 조작 동안 사용될 최대 가속도를 계산하기 위한 제어 알고리즘의 본 명세서에서의 논의의 목적을 위해, 동력 유닛 제1 방향 및 포크 제1 방향으로 트럭(10)의 이동 동안 가속 및 감속은 다음과 같이 한정된다: 트럭(10)으로 하여금 동력 유닛을 먼저 전방으로 이동시키게 하는 주행 스위치(54)의 전방 및 상향 회전은 동력 유닛 제1 방향으로의 양의 가속도(속도가 증가함)로서 한정되며; 트럭(10)으로 하여금 예를 들어 포크를 먼저 후진으로 이동시키게 하는 주행 스위치(54)의 후방 및 하향 회전은 포크 제1 방향으로 양의 가속도(속도가 증가함)로서 한정되며; 트럭(10)이 포크 제1 방향으로 이동하여 트럭(10)으로 하여금 감속하거나 제동되게(속도가 감소함) 하는 동안 주행 스위치(54)의 전진 및 상향 회전 또는 브레이크 스위치(41)의 작동은 음의 가속도 또는 감속으로서 한정되며; 트럭(10)이 동력 유닛 제1 방향으로 이동하여 트럭(10)으로 하여금 감속하거나 제동되게(속도가 감소함) 하는 동안 주행 스위치(54)의 후방 및 하향 회전 또는 브레이크 스위치(41)의 작동은 음의 가속도 또는 감속으로서 한정된다.Forward and upward rotation of the
위에서 언급된 바와 같이, 제1 실시예에 따르면, 동력 유닛 제1 방향 또는 포크 제1 방향 중 하나에서 제동하는 동안 발생하는 것과 같은 음의 가속도 값은 차량의 가장 최근의 수동 조작 동안 제1 방향으로 트럭(10)의 가속도를 나타내는 제1 값을 계산하는데 사용하기 위해 수집되지 않는다. 그러나, 제2 실시예에 따르면, 양의 가속도 값(트럭의 속도가 동력 유닛 제1 또는 포크 제1 방향으로 증가하는 경우) 및 음의 가속도 값(트럭의 속도가 동력 유닛 제1 또는 포크 제1 방향으로 감소하는 경우) 모두는 수집되어, 차량의 가장 최근의 수동 조작 동안 제1 방향으로의 트럭(10)의 가속도를 나타내는 제1 값을 계산하는데 사용된다. 음의 가속도 값이 수집되는 제2 실시예에서, 음의 가속도 값의 절대값은 아래에 설명된 수학식 및 계산에서 사용된다. 따라서, 일부 실시예는 임의의 음의 가속도 데이터를 무시할 수 있지만, 다른 실시예는 설명된 수학식 및 계산에서 음의 가속도 데이터의 절대값을 사용하는 것에 의해 이러한 데이터를 고려할 수 있다.As mentioned above, according to the first embodiment, negative acceleration values, such as those occurring during braking in either the power unit first direction or the fork first direction, during the most recent manual operation of the vehicle in the first direction It is not collected for use in calculating the first value representing the acceleration of the
단계 303에서, 트럭(10)의 가장 최근의 수동 조작 동안 수집된 제1 방향으로의 가속도 값은 가중 평균 방정식으로 필터링되어, 덜 가중되고 평활화된 최대 이상값(maximum outlier)을 만든다. 아래에 제시된 예시적인 수학식 1은 트럭(10)의 가장 최근의 수동 조작으로부터 수집된 제1 방향으로의 가속도 값에 기초하여 가중 평균값을 계산하기 위해 수집된 제1 방향으로의 가속도 값을 필터링하는데 사용될 수 있다. At
![]()
![]()

wax-(i+1) = 제1 방향(예를 들어, "x")에서 계산된 가중 평균; 여기서 i = 1 …(n-1)이고, n은 수집된 개별 가속도 값(ax_j)이 그룹화되는 서브세트의 총 수이며;wa x−(i+1) =weighted average computed in the first direction (eg “x”); where i = 1... (n-1), where n is the total number of subsets into which the collected individual acceleration values (a x_j ) are grouped;
wax-i; 여기서 i = 1 … n이며; wax-i = 제1 계산을 위한 제1 방향으로의 첫번째 3개의 "시작" 가속도 값의 산술 평균 및 이후의 가장 최근의 가중 평균이며;wa xi ; where i = 1... is n; wa xi = the arithmetic mean of the first three "start" acceleration values in the first direction for the first calculation and the most recent weighted average thereafter;
gs = 가중 계수이며, 여기서 s = 1…m+1이고, 여기서 m은 각각의 서브세트의 구성원(member)의 수이며;g s = weighting factor, where s = 1… m+1, where m is the number of members of each subset;
g1 = wax-i의 가중 계수이며; 예시된 실시예에서, g1 = 3이지만, 임의의 값일 수 있고;g 1 = the weighting factor of wa xi ; In the illustrated embodiment, g 1 =3, but can be any value;
g2, g3, g4 = 추가 가중 계수 = 1이지만 임의의 값일 수 있으며, 전형적으로 g1보다 작고;g 2 , g 3 , g 4 = additional weighting factor = 1 but can be any value and is typically less than g 1 ;
ax_[(i*m)+1], ax_[(i*m)+2], ax_[(i*m)+3], 여기서 i = 1…(n-1); ax_[(i*m)+1], ax_[(i*m)+2], ax_[(i*m)+3] = 트럭(10)의 가장 최근의 수동 조작 동안 수집된 서브세트를 한정하는 제1 방향에서 3개의 인접한 개별 가속도 값이다. 서브세트는 3개 초과 또는 3개 미만의 가속도 값을 포함할 수 있다. 수집된 첫 번째 3개의 가속도 값(ax_1, ax_2 및 ax_3)도 마찬가지로 제1 서브세트를 만든다.a x_[(i*m)+1] , a x_[(i*m)+2] , a x_[(i*m)+3] , where i = 1… (n-1); a x_[(i*m)+1] , a x_[(i*m)+2] , a x_[(i*m)+3] = serve collected during the most recent manual operation of the
제1 방향으로의 첫 번째 "시작" 가속도 값은 3개 미만 또는 3개 초과의 값을 포함할 수 있고, 각각의 서브세트("m")의 구성원의 수는 마찬가지로 3개 미만 또는 3개 초과의 구성원을 포함할 수 있다.The first “starting” acceleration value in the first direction may contain less than or greater than 3 values, and the number of members of each subset (“m”) may likewise be less than or greater than 3. may include members of
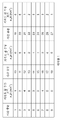
예시의 목적을 위해, 샘플 계산은 이제 제1 방향에서 수집된 가속도 값을 시뮬레이션하는 비실제 샘플 값에 기초하여 제공되며, 도 5의 테이블 1에 기재되어 있다. 테이블 1에 기재되어 있는 모든 가속도 값은 양의 값이다. 그러나, 위에서 언급된 바와 같이, 음의 가속도 값도 또한 수집되어 사용될 수 있다. 위에서 추가로 언급된 바와 같이, 음의 가속도 값이 수집되는 경우, 음의 가속도 값의 절대값이 아래에 설명된 수학식 및 계산에서 사용된다.For purposes of illustration, sample calculations are now provided based on non-real sample values simulating acceleration values collected in the first direction, and are listed in Table 1 of FIG. 5 . All acceleration values listed in Table 1 are positive. However, as mentioned above, negative acceleration values can also be collected and used. As further noted above, when negative acceleration values are collected, the absolute value of the negative acceleration values are used in the equations and calculations described below.
wax-1 = 첫 번째 3개의 "시작" 가속도 값의 산술 평균 = wa x-1 = arithmetic mean of the first 3 "start" acceleration values =
![]()
![]()
wax-2 = 제1 가중 평균값 =wa x-2 = first weighted average value =
![]()
![]()
ax-3 = 제2 가중 평균값 =a x-3 = second weighted average value =

도 5의 테이블 1에 기재된 샘플 값에 기초한 나머지 가중 평균값도 또한 유사한 방식으로 계산된다. 결과는 도 6의 테이블 2에 기재되어 있다.The remaining weighted average values based on the sample values listed in Table 1 of FIG. 5 are also calculated in a similar manner. The results are listed in Table 2 of FIG. 6 .
따라서, 수학식 1에 대하여, ax_[(i*m)+1], ax_[(i*m)+2] 및 ax_[(i*m)+3]의 값은 가중 평균값(wax-(i+1))의 계산에서 사용된다. 도 5의 예에 따르면, "i"는 1 내지 9의 범위일 수 있지만, 수학식 1의 목적을 위해, "i"의 범위는 1 내지 8이다. 따라서, 도 5의 테이블에서 27개의 가속도 값(즉, ax_j, 여기서 "j" = 도 5의 예에서 수집된 27개의 개별 수집된 가속도 값)은 각각 3개의 요소를 가지는 9개의 별개의 서브세트로 배열될 수 있다. 위에서 언급된 바와 같은 제1 서브세트는 제1 방향에서 첫 번째 3개의 "시작" 가속도 값의 산술 평균을 포함하며, 이후의 8개 서브세트의 각각에 대해, 가중 평균이 수학식 1에 따라서 계산된다. 예시적인 초기 산술 평균과 예시적인 8개의 가중 평균이 도 6에 도시되어 있다. 당업자는 3개 값의 서브세트 크기가 단지 예이고 9개의 서브세트를 이용하는 것이 또한 예시적인 양이라는 것을 쉽게 인식할 것이다.Therefore, for
도 4의 단계 305에서, 트럭(10)의 진행 방향(DT)에 의해 한정된 제1 방향으로의 최대 가속도는 아래에 설명된 예시적인 수학식 2를 사용하여 결정된다:In
[수학식 2] [ Equation 2 ]
ax-wa-max = 제1 방향으로의 최대 가속도 = max(wax-i) = 계산된 초기 산술 및 가중 평균(wax-i)의 최대값.a x-wa-max = maximum acceleration in the first direction = max(wa xi ) = maximum of the calculated initial arithmetic and weighted average (wa xi ).
도 6의 테이블 2의 결과에 기초하여, max(wax-i) = ax-8 = 3.82이다.Based on the results of Table 2 of FIG. 6 , max(wa xi ) = a x−8 = 3.82.
ax-wa-max는 계산된 임의의 수의 초기 산술 및 가중 평균값(wax-i)로부터 선택할 수 있다는 점에 유의한다. 예를 들어, 사전 결정된 기간, 예를 들어, 지난 10초 동안 계산된 평균값(wax-i)이 고려될 수 있다. 시간을 고려하지 않고, 예를 들어 25개의 평균값과 같이 계산된 사전 결정된 수의 초기 산술 및 가중 평균값(wax-i)이 고려될 수 있음이 또한 고려된다. 또한, 트럭(10)의 가장 최근의 수동 조작의 전체 동안 계산된 모든 초기 산술 및 가중 평균값(wax-i)이 고려될 수 있다는 것이 또한 고려된다. 예시된 예에서 초기 산술 및 가중 평균(wx)의 9개 값이 고려되었다. 그러나, 초기 산술 및 가중 평균(wax-i)의 9개 미만 또는 9개 이상의 값은 max(ax-wa-i) = 계산된 초기 산술 및 가중 평균(wax-i)의 최대값을 선택할 때 고려될 수 있으며, 이는 ax-wa-max = 제1 방향으로의 최대 가속도를 한정한다. 제1 방향으로의 최대 가속도(ax-wa-max)는 차량의 가장 최근의 차량 수동 조작 동안 제1 방향으로의 차량의 가속도를 나타내는 제1 값을 한정한다. 제1 방향으로의 최대 가속도(ax-wa-max)로서 고려되는 초기 산술 및 가중 평균값(wax-i)의 세트로부터 최대 또는 가장 높은 값을 선택하는 대신, 고려된 초기 산술 및 가중 평균값(wax-i)의 두 번째 또는 세 번째 가장 높은 값은 제1 방향으로의 최대 가속도(ax-wa-max)로서 선택될 수 있다. 고려된 초기 산술 및 가중 평균값(wax-i)의 세트는 제1 방향으로 최대 가속도(ax-wa-max)를 결정하기 위해 평균될 수 있다는 것이 추가로 고려된다.Note that a x-wa-max can be selected from any number of initial arithmetic and weighted average values (wa xi ) calculated. For example, an average value wa xi calculated over a predetermined period of time, for example the last 10 seconds, may be considered. It is also contemplated that a predetermined number of initial arithmetic and weighted average values (wa xi ) calculated, such as
컨트롤러(103)에 대한 예시적인 제어 알고리즘 또는 프로세스는 도 7에서 트럭(10)의 가장 최근의 수동 조작 동안 제1 방향으로의 트럭(10)의 가속도를 나타내는 제2 값을 계산하기 위해 도시되어 있다. 단계 401에서, 가속도계(1103)로부터 제2 방향으로의 일련의 가속도 값이 수집되어 컨트롤러(103)에 의해 메모리에 저장되며, 여기서 제2 방향은 가로 방향(TR)에 의해 한정된다(도 1 참조).An exemplary control algorithm or process for the
단계 403에서, 트럭(10)의 가장 최근의 수동 조작 동안 수집된 제2 방향으로의 수집된 가속도 값은 최대 이상값이 덜 가중되고 평활화되도록 가중 평균 방정식으로 필터링된다. 아래에 설명된 예시적인 수학식 3은 트럭(10)의 가장 최근의 수동 조작 동안 수집된 제2 방향으로의 가속도 값을 필터링하는데 사용될 수 있다.At
![]()
![]()
![]()
![]()
way-(i+1) = 제2 방향(예를 들어, "y")에서 계산된 가중 평균이며; 여기서 i = 1 …(n-1)이고;wa y−(i+1) =weighted average calculated in the second direction (eg “y”); where i = 1... (n-1);
way-i; 여기서 i = 1 … n; way-i = 제1 계산을 위한 제2 방향의 첫 번째 3개의 "시작" 가속도 값의 산술 평균과, 이후에 가장 최근에 계산된 가중 평균을 포함하는 처리된 값이며;wa yi ; where i = 1... n; wa yi = processed value comprising the arithmetic average of the first three “starting” acceleration values in the second direction for the first calculation and then the most recently calculated weighted average;
gs = 가중 계수, 여기서 s = 1…m+1, 여기서 m은 각각의 서브세트에서의 구성원 수이며;g s = weighting factor, where s = 1… m+1, where m is the number of members in each subset;
g1 = way-i의 가중 계수이며; 예시된 실시예에서, g1 = 3이지만, 임의의 값일 수 있으며;g 1 = the weighting factor of wa yi ; In the illustrated embodiment, g 1 =3, but can be any value;
g2, g3, g4 = 추가 가중 계수 = 1, 그러나 다른 값일 수 있으며;g 2 , g 3 , g 4 = additional weighting factor = 1, but may be other values;
ay_[(i*m)+1], ay_[(i*m)+2], ay_[(i*m)+3]; 여기서 i = 1 …(n-1); ay_[(i*m)+1], ay_[(i*m)+2], ay_[(i*m)+3] = 트럭(10)의 가장 최근의 수동 조작동안 수집된 서브세트를 한정하는, 제2 방향으로의 3개의 인접한 개별 가속도 값이다. 서브세트는 3개 초과 또는 3개 미만의 가속도 값들을 포함할 수 있다. 수집된 첫 번째 3개의 가속도 값(ay_1, ay_2 및 ay_3)도 마찬가지로 제1 서브세트를 만든다.a y_[(i*m)+1] , a y_[(i*m)+2] , a y_[(i*m)+3] ; where i = 1... (n-1); a y_[(i*m)+1] , a y_[(i*m)+2] , a y_[(i*m)+3] = serve collected during the most recent manual operation of the
제2 방향으로의 첫 번째 "시작" 가속도 값은 3개 미만 또는 3개 초과의 값을 포함할 수 있고, 각각의 서브세트("m")의 구성원의 수는 마찬가지로 3개 미만 또는 3개 초과의 구성원을 포함할 수 있다.The first “starting” acceleration value in the second direction may contain less than or more than 3 values, and the number of members of each subset (“m”) may likewise be less than or more than 3. may include members of
예시의 목적을 위해, 샘플 계산은 이제 제2 방향으로의 수집된 가속도 값을 시뮬레이션하고 도 8의 테이블 3에 나와 있는 비실제 샘플 값에 기초하여 제공된다.For illustrative purposes, a sample calculation is now provided that simulates the collected acceleration values in the second direction and is based on the non-real sample values shown in Table 3 of FIG. 8 .
way-1 = 제2 방향으로의 첫 번째 3개의 "시작" 가속도 값의 산술 평균 = wa y-1 = arithmetic mean of the first 3 "start" acceleration values in the second direction =
![]()
![]()
way-2 = 제1 가중 평균값 = ![]()
![]()
![]()
![]()
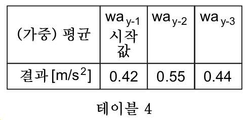
도 8의 테이블 3에 기재된 샘플값에 기초한 나머지 가중 평균값도 유사한 방식으로 계산된다. 결과는 도 9의 테이블 4에 나와 있다.The remaining weighted average values based on the sample values listed in Table 3 of FIG. 8 are calculated in a similar manner. The results are shown in Table 4 of FIG. 9 .
도 7의 단계 405에서, 트럭(10)의 가로 방향(TR)에 의해 한정된 제2 방향으로의 최대 가속도(가장 최근의 수동 조작에 대한)는 아래에 설명된 수학식 4를 사용하여 결정된다:In
[수학식 4] [ Equation 4 ]
ay-wa-max = 제2 방향으로의 최대 가속도 = max(way-i) = 계산된 초기 산술 및 가중 평균의 최대값(way-i).a y-wa-max = maximum acceleration in the second direction = max(wa yi ) = maximum of the calculated initial arithmetic and weighted average (wa yi ).
도 9의 테이블 4의 결과에 기초하여, max(way-i) = way-2 = 0.55이다.Based on the results of Table 4 of FIG. 9 , max(wa yi ) = wa y−2 = 0.55.
ay-wa-max는 계산된 초기 산술 평균 또는 임의의 수의 가중 평균(way-(i+1))으로부터 선택될 수 있음에 유의한다. 예를 들어, 사전 결정된 기간, 예를 들어 마지막 10초 동안 계산된 초기 산술 및 가중 평균값(way-i)이 고려될 수 있다. 시간을 고려하지 않고, 예를 들어 25개의 평균값과 같이 계산된 초기 산술 및 가중 평균값(way-i)의 사전 결정된 수가 고려될 수 있다는 것이 또한 고려된다. 또한, 트럭(10)의 가장 최근의 수동 조작 전체 동안 계산된 모든 초기 산술 및 가중 평균값(way-i)이 고려될 수 있다는 것이 고려된다. 예시된 예에서, 초기 산술 및 가중 평균(way-i)의 3개의 값이 고려되었다. 그러나, max(way-i) = 계산된 초기 산술 및 가중 평균(way-i)의 최대값을 선택할 때 초기 산술 및 가중 평균(way-i)의 3개 미만 또는 3개 초과의 값이 고려될 수 있으며, 이는 ay-wa-max = 제2 방향으로의 최대 가속도를 한정한다. 제2 방향으로의 차량의 최대 가속도(ay-wa-max)는 차량의 가장 최근의 수동 조작 동안 제2 방향으로의 차량의 가속도를 나타내는 제2 값을 한정한다.Note that a y-wa-max can be selected from the calculated initial arithmetic mean or any number of weighted averages (wa y-(i+1) ). For example, an initial arithmetic and weighted average value (wa yi ) calculated over a predetermined period of time, eg the last 10 seconds, may be taken into account. It is also contemplated that a predetermined number of calculated initial arithmetic and weighted average values (wa yi ) may be considered, such as
컨트롤러(103)에 대한 예시적인 제어 알고리즘 또는 프로세스는 트럭(10)의 이전 또는 가장 최근의 수동 조작 동안 제1 및 제2 방향으로의 트럭(10)의 가속도를 나타내는 제1 및 제2 값에 기초하여 다음 반자동 운전 조작 동안 사용될 최대 가속도를 계산하기 위해 도 10에 도시되어 있다. 앞서 언급한 바와 같이, 트럭(10)의 제1 방향 가속도를 나타내는 제1 값은 제1 방향으로의 최대 가속도(ax-wa-max)에 의해 한정되고, 트럭(10)의 제2 방향 가속도를 나타내는 제2 값은 제2 방향으로의 최대 가속도(ay-wa-max)에 의해 한정된다. 트럭(10)의 조작 동안, 조작자는 일반적으로 직선 경로를 따라 신속하게 트럭(10)을 운전할 수 있다. 트럭(10)의 조작 동안, 조작자는 대체로 직선 경로를 따라서 신속하게 트럭(10)을 운전할 수 있지만, 회전 중에는 천천히 운전할 수 있다. 회전 동안 트럭(10)을 천천히 운전하는 조작자를 고려하기 위해, 단계 501에서, 컨트롤러(103)는 제1 방향으로의 최대 가속도(ax-wa-max)에 대한 보정이 적절한지를 결정하도록 제2 방향으로의 최대 가속도(ay-wa-max)를, 메모리에 저장된 룩업 테이블에 설정된 경험적으로 결정된 범위와 비교한다.An exemplary control algorithm or process for
아래에서 자세히 설명하는 것처럼 제2 방향으로의 최대 가속도(ay-wa-max)는 다음 반자동 운전 조작에 대한 최대 가속도를 결정할 때 제1 방향으로의 최대 가속도(ax-wa-max)를 수정 또는 조정하도록 사용될 수 있다. 제2 방향으로의 최대 가속도(ay-wa-max)는 트럭(10)과 그 현재 화물의 안정성에 대한 조작자의 평가를 나타낼 가능성이 높다. 제2 방향으로의 최대 가속도가 제1 경험적으로 도출된 값보다 크거나 또는 경험적으로 도출된 "높은 가속도" 범위 내에 있으면, 이는 화물이 상대적으로 안정적이고 다음 반자동 운전 조작을 위한 최대 가속도가 증가될 수 있다고 조작자가 믿고 있다는 것을 나타낼 수 있다. 그러나, 제2 방향으로의 최대 가속도가 제2 경험적으로 도출된 제2 값보다 작거나 또는 경험적으로 한정된 "낮은 가속도" 범위 내에 있으면, 이는 제1 방향으로의 계산된 최대 가속도가 상대적으로 높더라도 화물이 불안정하다고 조작자가 믿고 있다는 것을 나타낼 수 있다. 따라서, 이러한 제2 경우에, 다음 반자동 운전을 위한 최대 가속도는 감소될 수 있다. 제2 방향으로의 최대 가속도가 경험적으로 도출된 제1 값과 제2 값 사이에 있거나 또는 경험적으로 한정된 중간 범위 내에 있으면, 다음 반자동 운전 조작을 위한 최대 가속도의 어떠한 보정 또는 조정도 만들어지지 않는다. 높은, 낮은, 및 중간 범위(또는 경험적으로 도출된 제1 및 제2 값)는 차량이 제1 및 제2 방향으로의 다양한 최대 가속도로 조작되는 제어된 환경에서 특정 차량에 대해 경험적으로 결정될 수 있으며, 상이한 값의 다양한 높은, 낮은, 및 중간 범위가 생성되고, 제2 방향으로의 최대 가속도를 사용하여, 보정 계수가 결정되어 제1 방향으로의 최대 가속도를 조정하도록 사용된다. 제1 방향으로 최적의 가속을 허용하면서도 트럭이 안정적인 방식으로 화물을 운반하고 지지할 수 있는 바람직한 높은, 낮은, 및 중간 범위가 선택된다.As detailed below, the maximum acceleration in the second direction (a y-wa-max ) modifies the maximum acceleration in the first direction (a x-wa-max ) when determining the maximum acceleration for the next semi-autonomous driving maneuver. Or it can be used to adjust. The maximum acceleration in the second direction (a y-wa-max ) likely represents the operator's assessment of the stability of the
비실제 값에 기초하여 예시적인 시뮬레이션된 룩업 테이블이 도 11에 나와 있으며, 이 테이블은 제2 방향으로의 최대 가속도(ay-wa-max)에 대한 3개의 개별 범위를 포함한다. 제2 방향으로의 가중 평균 가속도가 도 11의 룩업 테이블에 표시된 높은 가속도 또는 낮은 가속도 범위에 속하면, 대응하는 보정 계수는 트럭(10)의 다음 반자동 운전 조작 동안 사용될 최대 가속도를 결정하는데 사용된다. 제2 방향으로의 최대 가속도가 도 11의 룩업 테이블에 표시된 중간 가속도 범위(또는 중간 범위) 내에 있으면, 제2 방향으로의 최대 가속도에 해당하는 어떠한 보정 계수도 트럭(10)의 다음 반자동 운전 조작 동안 사용하기 위한 최대 가속도를 결정하는데 사용되지 않는다. An exemplary simulated look-up table based on non-real values is shown in FIG. 11 , which includes three separate ranges for the maximum acceleration in the second direction (a y-wa-max ). If the weighted average acceleration in the second direction falls within the high or low acceleration range indicated in the lookup table of FIG. 11 , the corresponding correction factor is used to determine the maximum acceleration to be used during the next semi-autonomous driving operation of the
위에서 논의한 예에서 제2 방향으로의 최대 가속도(ay-wa-max)= 0.55이다. 이러한 값은 +10%의 보정 계수에 해당하는 높은 가속도 범위 내에 속한다.In the example discussed above, the maximum acceleration in the second direction (a y-wa-max ) = 0.55. These values fall within the high acceleration range corresponding to a correction factor of +10%.
단계 503에서, 다음 반자동 운전 조작 동안 사용될 최대 가속도(이는 "반자동 운전 조작 최대 가속도"로서 또한 지칭됨)는 예시적인 수학식 5를 사용하여 계산된다:In
[수학식 5] [ Equation 5 ]
max.acc = max(wax-i) * (1 + corrx + corry)max.acc = max(wa xi ) * (1 + corr x + corr y )
여기서, max.acc = 다음 반자동 운전 조작 동안 제1 방향에서 사용될 최대 가속도이며;where max.acc = the maximum acceleration to be used in the first direction during the next semi-autonomous driving operation;
corrx = 어떤 값과도 같을 수 있는 안전 여유이다. 예시된 실시예에서, corrx = -5%이며(안전 여유를 제공하기 위해 max.acc를 감소시키기 위해 예시된 실시예에서와 같이 음의 값을 포함할 수 있음);corr x = safety margin that can be equal to any value. In the illustrated embodiment, corr x = -5% (can include negative values as in the illustrated embodiment to reduce max.acc to provide a margin of safety);
corry = 도 11의 룩업 테이블로부터의 보정 계수이며, 제2 방향으로의 최대 가속도(ay-wa-max)에 기초한다.corr y =correction factor from the lookup table of FIG. 11, based on the maximum acceleration in the second direction (a y-wa-max ).
위에서 논의한 샘플 값에 기초하는 max.acc에 대한 샘플 계산이 이제 제공될 것이다.A sample calculation for max.acc based on the sample values discussed above will now be provided.
max.acc = max(wax-i) * (1 + corrx + corry) = 3.82 * (1 - 0.05 + 0.1) = 4.01max.acc = max(wa xi ) * (1 + corr x + corr y ) = 3.82 * (1 - 0.05 + 0.1) = 4.01
따라서, 이러한 샘플에서, 컨트롤러(103)는 다음 반자동 또는 원격 제어 조작 동안 트럭(10)의 제1 방향으로의 트럭(10)의 최대 양의 가속도(속도가 증가함)를 4.01 m/s2로 제한하도록 견인 모터 컨트롤러(106)와 통신한다.Thus, in this sample, the
컨트롤러(103)는 위에서 설명된 수학식 1 및 2를 사용하여 차량의 가장 최근의 수동 조작 동안 제1 방향으로의 차량의 감속만을 나타내는 제1 값을 계산할 수 있다는 것이 또한 고려되며, 여기서 차량의 가장 최근의 수동 조작에서 수집된 각각의 감속 값의 절대값은 수학식 1 및 2를 사용하여 제1 값을 계산하는데 사용된다. 감속 값이 매우 큰 크기를 가질 수 있는 긴급 제동에 해당하는 감속 값은 차량의 감속을 나타내는 제1 값을 계산할 때 무시된다.It is also contemplated that the
예를 들어, 주행의 방향(DT) 또는 제1 방향으로의 가속도는 트럭(10)이 가속도계를 가지지 않는 경우에, 제1 및 제2 방향으로의 가속도 값은 대안적인 방식으로 계산될 수 있다. 예를 들어, 주행의 방향(DT) 또는 제1 방향의 가속도는 속도 센서를 사용하여 결정될 수 있으며, 여기서 속도 센서는 견인 모터 컨트롤러에 제공될 수 있다. 컨트롤러(103)는 속도 또는 속력 값을 미분하여 가속도 값을 계산할 수 있다. 가속도는 또한 홈 위치에 대한 주행 스위치(54)의 각도 위치로부터 유도될 수 있으며, 그립(54)은 위에서 언급된 바와 같이 트럭(10)의 가속도/제동을 제어한다. 룩업 테이블로의 입력으로서 그립(54)의 각도 위치를 사용하여, 트럭 가속도는 특정 가속도 값을 가진 특정 그립 각도 위치 값에 대응하는 룩업 테이블로부터 선택된다. 최대 속도 값은 그립 각도 위치에 기초하여 룩업 테이블에 의해 또한 제공될 수 있다.For example, the direction of travel DT or acceleration in the first direction may be calculated in an alternative way, in case the
가로 방향(TR) 또는 제2 방향의 가속도는 다음 수학식을 사용하여 결정될 수 있다. 가속도 = v2/rThe acceleration in the transverse direction (TR) or the second direction may be determined using the following equation. acceleration = v 2 /r
여기서, v = 트럭 속도이고;where v = truck speed;
r = 트럭이 움직이는 곡선의 반경이다.r = the radius of the curve the truck moves.
반경(r)은 다음의 수학식을 사용하여 계산될 수 있다:Radius (r) can be calculated using the following equation:
r = 휠베이스 치수/sin αr = wheelbase dimension/sin α
여기서, 축간거리 치수가 고정 값이고 트럭(10)의 전륜으로부터 후륜까지의 거리와 동일하고;Here, the wheelbase dimension is a fixed value and is equal to the distance from the front wheel to the rear wheel of the
스티어링 각도(α)는 스티어링 휠 각도임에 따라서 컨트롤러(103)에 의해 전형적으로 공지된다.The steering angle α is typically known by the
도 5의 테이블은 단일 수동 조작 동안 모니터링된 운전 파라미터를 나타낸다. 그러나, 실시예는 또한 트럭(10)의 단일 수동 조작보다 많은 운전 파라미터 데이터를 모니터링하고 저장하는 것을 고려한다. 예를 들어, 하나 이상의 운전 파라미터에 대한 데이터는 임의의 수의 가장 최근의 수동 조작에 대해 모니터링되고 저장될 수 있다.The table of FIG. 5 represents the operating parameters monitored during a single manual operation. However, embodiments also contemplate monitoring and storing more driving parameter data than a single manual operation of the
그러므로, 컨트롤러(103)는 각각의 수동 조작에 속하는 데이터가 상이한 수동 조작에 속하는 데이터로부터 분리된 상태로 유지될 수 있도록 각각의 수동 조작의 시작 및 종료를 한정할 수 있다. 특정 수동 조작은 존재 센서(58)에 의해 지시되는 것과 같이 조작자가 트럭(10)에 있을 때 시작되고, 트럭(10)을 적어도 최소 속도로 이동시킬 수 있는 것으로 간주될 수 있다. 대안적으로, 특정 수동 조작은 운전 신호가 원격 제어 디바이스(70)를 통하지 않고 주행 스위치(54)를 통해 생성될 때 시작되는 것으로 간주될 수 있다. 특정 수동 조작은 조작자가 조작자 스테이션(30) 외부에 위치하고 트럭(10)의 동력 유닛(14)의 제2 단부 섹션(14B)의 상단 근처에 위치된 운전 제어 스위치(140)의 활성화를 통해 트럭이 움직이게 할 때 시작되는 것으로 추가로 간주되는 것이 고려된다. 특정 수동 조작은 트럭(10)이 적어도 사전 결정된 시간 동안 정지 상태를 유지할 때 종료되는 것으로 간주될 수 있다. 대안적으로, 특정 수동 조작은 트럭(10)이 정지되고 조작자가 트럭에서 내릴 때 종료되는 것으로 간주될 수 있다. 대안적으로, 특정 수동 조작은 조작자가 원격 제어 디바이스(70)를 통해 반자동 운전 조작을 시작하면 종료되는 것으로 간주될 수 있다. 또한 수동 조작은 트럭(10)이 여전히 움직이고 있을 때에도 조작자가 트럭(10)의 플랫폼에서 내릴 때 종료되는 것으로 간주될 수 있다.Therefore, the
위에서 언급된 바와 같이, 모니터링되고 저장된 데이터(단일 수동 조작으로부터든 또는 다수의 수동 조작으로부터든)는 이후에 트럭(10)의 후속적으로 발생하는 반자동 운전 조작의 구현을 제어하기 위해 사용될 수 있다.As mentioned above, the monitored and stored data (whether from a single manual operation or multiple manual operations) may then be used to control the implementation of subsequently occurring semi-autonomous driving operations of the
하나 이상의 최근의 수동 조작 동안 수집되어 저장된 데이터를 지우거나 재설정하는 것은 트럭(10)의 특정 운전 조작 동안 또는 이후에 유익할 수 있다. 예를 들어, 제1 팔레트에 의해 운반되거나 팔레트 상에 있는 품목이 트럭(10)에 의해 운송되는 동안 수집되고 저장된 모니터링된 운전 파라미터에 대한 데이터는 제1 팔레트가 트럭(10)으로부터 하역되고 새로운 빈 팔레트가 획득되면 트럭(10)의 반자동 운전 조작을 구현하는 것과 관련되지 않을 수 있다. 따라서, 새로운 픽업 조작이 트럭(10)의 조작자에 의해 시작될 때, 트럭(10)의 현재 수동 조작 동안 하나 이상의 운전 파라미터에 대한 이전에 모니터링 및 저장된 데이터는 폐기되거나 재설정될 수 있어서, 하나 이상의 운전 파라미터에 대한 새로 모니터링된 데이터만이 트럭(10)의 후속적으로 발생하는 반자동 운전 조작을 구현하는데 사용된다. 한 실시예에 있어서, 현재 수동 조작, 또는 후속적으로 발생하는 반자동 운전 조작 직전의 수동 조작 동안 수집된 하나 이상의 운전 파라미터에 대한 새로 모니터링된 데이터만이 후속적으로 발생하는 반자동 운전 조작을 구현하는데 사용되며, 현재 수동 조작 이전에 발생한 이전 수동 조작 또는 후속적으로 발생하는 반자동 운전 직전에 수동 조작으로부터의 어떠한 데이터도 무시된다.It may be beneficial during or after certain driving operations of the
전형적인 재고품 픽업 조작은 조작자가 창고 또는 유통 센터의 하나 이상의 통로를 따라서 제공된 보관 영역에 위치된 이용 가능한 재고 품목으로부터 주문을 채우는 것을 포함한다. 조작자는 전형적으로 화물 취급 조립체(12)의 포크(16)에 제공된 하나 이상의 팔레트(P)에 적재되는 품목(들)(I)이 픽업되어야 하는 다양한 픽업 위치 사이에서 트럭(10)을 운전하며(도 13 참조), 팔레트(P) 및 품목(I)은 포크(16) 상에 있거나 이에 의해 운반되는 화물(L)을 한정한다. 팔레트 대신에, 롤 케이지, 냉동 상자 또는 기타 특수 컨테이너가 화물 취급 조립체의 포크(16)에 제공될 수 있으며, 롤 케이지, 냉동 상자 또는 기타 특수 컨테이너, 및 롤 케이지, 냉동 상자 또는 기타 특수 컨테이너에 적재된 픽업 품목은 포크(16) 상의 화물 또는 포크(16)에 의해 운반되는 화물을 한정한다. 조작자는 핸들(52)과 전술한 바와 같은 주행 스위치(54)를 사용하여 수동으로 트럭(10)을 운전하거나, 차량의 반자동 제어를 위한 원격 제어 디바이스(70)를 사용하여 원격 제어 모드에서 트럭(10)을 조작할 수 있다.A typical inventory pick-up operation involves an operator filling orders from available inventory items located in storage areas provided along one or more aisles of a warehouse or distribution center. An operator typically drives the
따라서, 컨트롤러(103)는 트럭(10)의 운전 조작을 분석하여, 새로운 픽업 조작의 시작을 나타낼 가능성이 있는 일련의 조작 또는 패턴을 자동으로 결정할 수 있다. 이러한 상황 하에서, 컨트롤러(103)는 그런 다음 현재 수동 조작 동안 발생한 모니터링된 하나 이상의 운전 파라미터에 대한 수집된 데이터를 재설정하거나 폐기할 수 있다. "현재 수동 조작"이라는 용어는 현재 수행 중인 수동 조작을 지칭할 수 있고, "가장 최근의 수동 조작"이라는 용어는 여전히 진행중인 수동 조작 직전에 발생한 조작을 지칭할 수 있으며, "이전의 수동 조작"이라는 용어는 가장 최근의 수동 조작 이전에 발생한 수동 조작을 지칭할 수 있고, "다음 수동 조작"이라는 용어는 현재 수동 조작에 후속하여 발생하는 수동 조작을 지칭할 수 있다. "현재 수동 조작"이 끝나면, 이는 "가장 최근의 수동 조작"인 것으로 간주될 수 있다.Accordingly, the
도 12는 본 개시내용의 실시예에 따른, 픽업 조작의 시작을 검출하는 것에 기초하여 제1 모니터링된 차량 운전 파라미터와 관련된 저장 데이터를 재설정하기 위한 예시적인 알고리즘의 흐름도를 도시한다.12 shows a flow diagram of an example algorithm for resetting stored data associated with a first monitored vehicle operating parameter based on detecting the start of a pick-up operation, in accordance with an embodiment of the present disclosure.
도 12의 방법 또는 프로세스에 따르면, 단계 1201은 컨트롤러(103)가 조작자에 의한 트럭(10)의 수동 조작, 즉 현재 수동 조작 동안 제1 차량 운전 파라미터를 모니터링하는 것을 포함한다. 위에서 상세히 설명된 바와 같이, 모니터링된 제1 차량 운전 파라미터는 제1 방향으로의 트럭(10)의 가속도와 관련될 수 있다.According to the method or process of FIG. 12 ,
따라서, 단계 1203에서, 컨트롤러(103)는 모니터링된 제1 차량 운전 파라미터와 관련된 데이터를 저장할 수 있다. 도 5의 예에서, 저장된 데이터는 트럭(10)의 수동 조작 동안 발생하는 트럭(10)의 개별 가속도 값일 수 있다. 또한, 저장된 데이터는 후속적으로 발생하는 트럭(10)의 반자동 조작에서 사용되는 개별 가속도 값에 기초하여 계산된 값, 즉, 제1 방향으로의 트럭(10)의 최대 가속도를 포함할 수 있다. 따라서, 컨트롤러(103)는 단계 1201에서 언급된 트럭(10)의 수동 조작에 후속하여 발생하는 트럭(10)의 반자동 운전을 구현하기 위해 저장된 데이터를 사용하도록 구성된다. Accordingly, in
그러나, 새로운 픽업 조작이 시작되기 전에 발생하는 현재 수동 조작 동안 수집된 데이터를 저장된 데이터가 포함하면, 그 저장된 데이터는 새로운 픽업 조작이 시작되고 완료된 후에 발생하는 반자동 조작과 관련되지 않을 수 있다. 따라서, 단계 1205에서, 컨트롤러는 트럭(10)의 현재 수동 조작 중에 발생하는 픽업 조작의 시작을 나타내는 트럭(10)의 조작을 검출한다. 픽업 조작의 시작을 검출할 때, 컨트롤러(103)는 단계 1207에서 그런 다음 모니터링된 제1 차량 운전 파라미터와 관련된 저장된 데이터를 재설정할 수 있다. 저장된 데이터를 재설정하는 것은 현재 수동 조작의 시작부터 새로운 또는 가장 최근의 픽업 조작의 검출 및 시작까지 트럭(10)의 현재 수동 조작 동안 수집된 저장된 데이터를 지우거나 폐기하는 것을 포함할 수 있다.However, if the stored data includes data collected during the current manual operation that occurs before the new pick operation begins, the stored data may not be relevant to the semi-automatic operation that occurs after the new pick operation starts and completes. Accordingly, in
저장된 데이터가 재설정되면, 컨트롤러(103)는 저장된 데이터를 재설정한 후에 제1 차량 운전 파라미터의 모니터링을 재개할 수 있다. 제1 운전 파라미터의 모니터링과 관련된 이러한 새로 획득된 데이터는 그런 다음 차량의 후속적으로 발생하는 반자동 운전 조작을 구현하는데 사용될 수 있다.When the stored data is reset, the
적어도 하나의 실시예에서, 픽업 조작의 시작을 나타내는 트럭(10)의 검출된 조작은 상승된 화물 취급 조립체(12)를 가진 수동으로 운전되는 트럭(10)으로부터 하강된 화물 취급 조립체(12)를 가진 정지되는 트럭(10)으로의 전환을 검출하는 것을 포함한다(도 13 참조). 즉, 컨트롤러(103)는 수동 조작에 의해 이동하던 트럭(10)이 이제 정지하였다는 것, 및 또한 상승 위치에 있던 화물 취급 조립체(12)가 하강되었다는 것을 검출한다. 위에서 언급된 바와 같이, 컨트롤러(103)는 트럭(10)이 이동하는지 또는 정지하고 있는지, 그리고 트럭이 가속도계(1103)로부터의 신호 또는 견인 컨트롤러(106)로부터의 모터 각속도 신호를 통해 주행된 거리를 결정할 수 있다. 또한 위에서 언급된 바와 같이, 컨트롤러(103)는 화물 취급 조립체(12)의 높이, 즉 화물 취급 조립체가 하나 이상의 높이 센서 또는 스위치 단독으로 또는 화물 센서(LS)와 조합하여 생성된 신호로부터 지면에 대해 상승된 위치 또는 홈 또는 가장 낮은 위치에 있는지의 여부를 결정할 수 있다. 화물 취급 조립체(12)의 상승된 위치는 가장 낮은 위치 위의 임의의 위치일 수 있다. 이러한 일련의 조작은 특히 상승된 화물 취급 조립체(12)가 실질적으로 0이 아닌 화물을 지지하고, 하강된 화물 취급 조립체(12)가 실질적으로 0인 화물을 지지할 때 새로운 픽업 조작의 시작을 나타낸다. 전술한 바와 같이, 컨트롤러(103)는 화물 센서(LS)에 의해 생성된 신호로부터 포크(16) 상의 화물의 중량을 결정할 수 있다. 도 13에서, 화물 취급 조립체(12)의 포크(16)는 팔레트(P)가 더 이상 포크(16)에 의해 지지되지 않고, 대신에 바닥(F) 또는 지면을 한정하는 다른 지지 표면에 의해 지지되도록 하강되었다. 따라서, 이러한 시퀀스는 예를 들어 트럭(10)이 적재된 팔레트(P)와 함께 이동하는 것으로부터, 정지되고 그런 다음 포크(16)가 적재된 팔레트(P)를 더 이상 지지하지 않도록 포크(16)를 완전히 하강시키는 것으로 전환할 때 발생한다. 이러한 일련의 조작은 상승된 화물 취급 조립체(12)가 적재된 팔레트를 지지하거나 팔레트가 없을 때에도 새로운 픽업 조작의 시작을 나타낼 수 있다는 것이 고려된다.In at least one embodiment, the detected manipulation of the
추가 실시예에서, 픽업 조작의 시작을 나타내는 트럭(10)의 검출된 조작은 도 13에 도시된 바와 같이, 상승된 화물 취급 조립체(12)를 가진 수동으로 운전되는 트럭(10)으로부터 하강된 화물 취급 조립체(12)를 가진 정지되는 트럭(10)으로의 전환을 검출하는 것, 및 포크(16)가 하강된 후에 포크(16) 상의 화물의 길이(L)와 적어도 동일한 거리에 대한 트럭(10)의 이동을 검출하는 것(도 14 참조)을 포함한다. 도 14에서, 예를 들어, 포크(16)는 팔레트(P)의 길이보다 약간 더 긴 길이를 가진다. 그러나, 트럭은 포크가 하나 이상의 통상적인 크기의 팔레트를 동시에 운반할 수 있도록 연장된 길이를 가지는 포크를 가질 수 있다는 것이 고려된다. 이러한 실시예에서, 포크는 포크의 단부에 있는 단 하나의 팔레트 또는 포크의 전체 길이를 따라서 2개 이상의 팔레트를 운반할 수 있다. 예를 들어, 포인트-레이저 또는 초음파 디바이스는 포크의 단부에 위치되는 것과 같이 제2 단부 섹션(14B)으로부터 팔레트까지의 거리를 감지하기 위해 제2 단부 섹션(14B)에 제공될 수 있다. 따라서, 트럭(10)은 단일 팔레트만이 포크에 제공될 때 단일의 팔레트의 길이만큼만 이동하는 것에 의해 화물의 길이(L)와 동일한 거리를 이동하거나, 또는 2개 이상의 팔레트가 포크에 제공될 때 2개 이상의 팔레트의 길이와 동일한 거리를 이동할 수 있다. 따라서, 포크(16)가 하강되고 어떠한 화물도 지지하지 않으면, 트럭(10)의 이동(포크(16) 상의 어떠한 화물도 없음)은 아마도 이전에 지지했던 팔레트에서 짐을 하역하는 트럭(10)을 나타내는 것이다.In a further embodiment, the detected tampering of the
상기의 일련의 조작은 트럭(10)의 검출된 조작이 실질적으로 0인 화물을 지지하는 동안 조작자가 하강된 화물 취급 조립체(12)를 가진 트럭(10)을 운전한다고 결정하는 것을 추가로 포함할 때 새로운 픽업 조작을 한층 더 나타낸다. 포크에 의해 운반되는 화물의 길이와 적어도 동일한 거리만큼 트럭(10)의 이동은 관련되지만(위에서 언급한 바와 같이), 화물이 없는 포크(16)의 길이보다 큰 거리에 대해 트럭(10)을 운전하는 것은 새로운 픽업 조작의 시작을 한층 더 나타낸다.The above sequence of operations will further include determining that the operator is driving the
또 다른 실시예에서, 픽업 조작의 시작을 나타내는 트럭(10)의 검출된 조작은 도 13에 도시된 바와 같이 상승된 화물 취급 조립체(12)를 가진 수동으로 운전되는 트럭(10)으로부터 하강된 화물 취급 조립체(12)를 가진 정지되는 트럭(10)으로의 전환을 검출하는 것, 도 14에 도시된 바와 같이 포크(16)가 하강된 후에 포크(16) 상의 화물(L)의 길이와 적어도 동일한 거리에 대해 트럭(10)의 이동을 검출하는 것, 실질적으로 0인 화물을 지지하는 동안 조작자가 하강된 화물 취급 조립체(12)를 가진 트럭(10)을 운전한다고 결정하는 것, 및 하강된 화물 취급 조립체(12)를 가진 이동하는 트럭(10)으로부터 새로 상승된 화물 취급 조립체(12)를 가진 정지되는 트럭(10)으로의 전환을 검출하는 것을 포함한다. 이러한 예에서, 트럭(10)은 본질적으로 비어 있고 하강된 화물 취급 조립체(12)와 함께 일정 거리를 이동하고, 이제 정지하였으며, 정지한 후에, 조작자는 후속적으로 화물 취급 조립체(12)를 상승시킨다. 특히, 새로 상승된 화물 취급 조립체(12)가 사전 결정된 양보다 작지만 실질적으로 0인 화물, 예를 들어, 빈 팔레트, 롤 케이지, 냉동 상자 또는 기타 특수 컨테이너의 중량보다 작은 화물을 지지할 때, 이러한 일련의 조작은 새로운 픽업 조작의 시작을 나타낸다. 사전 결정된 양은 종래의 빈 팔레트, 롤 케이지, 냉동 상자 또는 기타 특수 컨테이너의 중량을 포함할 수 있다.In another embodiment, the detected manipulation of the
다시 말해서, 트럭(10)은 실질적으로 0이 아닌 화물을 가졌으며(즉, 품목(I)을 가진 팔레트(P)를 운반하고 있었으며), 트럭(10)은 그런 다음 정지하고, 팔레트(P) 및 팔레트(P)에 있는 품목(I)을 하역하였으며, 팔레트(P) 및 품목(I)은 포크(16) 상의 화물(L)을 한정하고, 하강된 화물 취급 조립체(12)와 함께 이동하도록 진행했다. 특히, 그 하강된 화물 취급 조립체(12)는 본질적으로 어떠한 화물도 지지하지 않았으며, 그러므로, 트럭(10)이 이동하는 동안 실질적으로 0인 화물을 지지하였다. 그 후, 트럭(10)은 정지되고 화물 취급 조립체(12)를 상승시켜서, 이제 상승된 화물 취급 조립체(12)는 화물을 지지하지만, 화물은 사전 결정된 양보다 적었다. 하나의 이러한 예는 조작자가 새로운 픽업 조작을 시작하도록 화물 취급 조립체(12)가 단지 빈 팔레트(P)를 지지할 때일 것이다. 이러한 상황에서, 컨트롤러(103)는 이전에 하강된 화물 취급 조립체(12)가 비어 있고 실질적으로 0인 화물을 지지하지만 이제 실질적으로 0인 화물보다 더 큰 팔레트의 중량을 적어도 지지하고 있다는 것을 화물 센서(LS)로부터 검출할 수 있다. 그러나, 팔레트(P) 자체의 중량은 팔레트(P) 상의 하나 이상의 품목(I)에 추가한 팔레트의 중량보다 적으며; 그러므로 컨트롤러(103)는 화물 센서(LS)에 의해 생성된 신호로부터, 화물 취급 조립체(12)가 실질적으로 0인 화물보다 크지만 적재된 또는 반적재된 팔레트의 화물보다 작은 화물을 지지하고 있다고 결정한다. 따라서, 이제 상승된 화물 취급 조립체(12)가 사전 결정된 양보다 작은 화물을 지지하는 것을 검출할 때, 컨트롤러(103)는 화물 지지 조립체(12)가 종래의 빈 팔레트의 중량과 동일한 화물을 지지하고 있다는 것을 검출할 수 있다.In other words, the
앞서 설명된 바와 같이, 단계 1207과 관련하여, 컨트롤러(103)가 픽업 조작의 시작을 검출하면, 컨트롤러(103)는 모니터링된 제1 차량 운전 파라미터와 관련된 저장된 데이터를 재설정할 수 있다. 추가적으로, 저장된 데이터는 조작자에 의한 트럭(10)의 수동 조작 동안 모니터링된 제2 차량 운전 파라미터와 관련된 데이터를 포함할 수 있으며, 컨트롤러(103)는 트럭(10)의 수동 조작에 후속하여 트럭(10)의 반자동 운전 조작을 구현하기 위해 모니터링된 제1 및 제2 차량 운전 파라미터의 저장된 데이터를 사용하도록 구성된다. 따라서, 단계 1207에서, 컨트롤러(103)는 모니터링된 제1 차량 운전 파라미터 및 모니터링된 제2 차량 운전 파라미터와 관련된 저장된 데이터를 재설정할 수 있다. 그러므로, 컨트롤러(103)는 위에서 설명된 수학식 1-5, 및 가장 최근의 픽업 조작이 시작한 이래 수집된 모니터링된 제1 및 제2 차량 주행 파라미터와 관련된 저장된 데이터를 사용하면서, 제1 방향으로의 최대 가속도(ax-wa-max) 및 제2 방향으로의 최대 가속도(ay-wa-max)를 계산하고 이들 계산으로부터 다음 반자동 운전 조작 동안 제1 방향으로 사용될 최대 가속도(max.acc)를 결정하기 위해 가장 최근의 픽업 조작 전에 수집된 데이터를 무시한다. As previously described, with respect to step 1207, when the
2019년 8월 27일자 출원된 "자재 취급 차량을 위한 적응형 가속"이라는 명칭의 미국 특허 가출원 제62/892,213호는 그 전체가 참조에 의해 본 명세서에 통합되고, 2020년 7월 30일자 출원된 미국 특허 출원 제16/943,567호는 또한 그 전체가 참조에 의해 본 명세서에 통합된다.U.S. Provisional Patent Application No. 62/892,213 entitled "Adaptive Acceleration for Material Handling Vehicles" filed on August 27, 2019, hereby incorporated by reference in its entirety, filed on July 30, 2020 US patent application Ser. No. 16/943,567 is also incorporated herein by reference in its entirety.
이와 같이 본 출원을 그의 실시예를 참조하여 상세하게 설명하였지만, 첨부된 특허청구범위에 한정된 범위를 벗어나지 않고 수정 및 변형이 가능하다는 것이 명백할 것이다.Although this application has been described in detail with reference to the examples thereof, it will be apparent that modifications and variations are possible without departing from the scope defined by the appended claims.
Claims (30)
컨트롤러에 의해, 조작자에 의한 차량의 수동 조작 동안 제1 차량 운전 파라미터를 모니터링하는 단계;
상기 컨트롤러에 의해, 상기 모니터링된 제1 차량 운전 파라미터와 관련된 데이터를 저장하는 단계로서, 상기 컨트롤러는 상기 차량의 수동 조작에 후속하여 상기 차량의 반자동 운전 조작을 구현하기 위해 상기 저장된 데이터를 이용하도록 구성되는, 상기 단계;
상기 컨트롤러에 의해, 상기 차량의 수동 조작 동안 발생하는 픽업 조작의 시작을 나타내는 상기 차량의 조작을 검출하는 단계; 및
상기 픽업 조작의 시작을 검출하는 것에 기초하여, 상기 컨트롤러에 의해, 상기 모니터링된 제1 차량 운전 파라미터와 관련된 저장 데이터를 재설정하는 단계를 포함하는, 방법.A method for operating a material handling vehicle comprising:
monitoring, by the controller, a first vehicle driving parameter during manual operation of the vehicle by an operator;
storing, by the controller, data relating to the monitored first vehicle driving parameter, wherein the controller is configured to use the stored data to implement semi-automated driving operation of the vehicle subsequent to manual operation of the vehicle. being, the step;
detecting, by the controller, an operation of the vehicle indicating a start of a pick-up operation occurring during manual operation of the vehicle; and
resetting, by the controller, stored data related to the monitored first vehicle driving parameter based on detecting the start of the pick-up operation.
상기 화물 취급 조립체에 의해 운반되는 화물의 길이와 적어도 동일한 거리에 대해 상기 하강된 화물 취급 조립체를 가진 차량의 이동으로서, 상기 제1 전환 후에 발생하는 상기 이동; 및
상기 하강된 화물 취급 조립체를 가진 이동하는 차량으로부터 새로 상승된 화물 취급 조립체를 가진 정지되는 차량으로의 제2 전환을 포함하는, 방법.2. The method of claim 1, wherein the detected manipulation of the vehicle comprises: first switching from a manually operated vehicle with a raised load-handling assembly to a stationary vehicle with a lowered load-handling assembly;
movement of the vehicle with the lowered load handling assembly for a distance at least equal to the length of the load carried by the load handling assembly, the movement occurring after the first shift; and
and a second transition from a moving vehicle with the lowered load-handling assembly to a stationary vehicle with a newly raised load-handling assembly.
실행 가능한 명령어를 저장하는 메모리; 및
상기 메모리와 통신하는 프로세서를 포함하며,
상기 프로세서에 의한 실행 가능한 명령어의 실행은 상기 프로세서로 하여금:
조작자에 의한 차량의 수동 조작 동안 제1 차량 운전 파라미터를 모니터링하고;
상기 모니터링된 제1 차량 운전 파라미터와 관련된 데이터를 저장하는데, 상기 컨트롤러는 상기 차량의 수동 조작에 후속하여 상기 차량의 반자동 운전 조작을 구현하기 위해 상기 저장된 데이터를 사용하도록 구성되고;
상기 차량의 수동 조작 동안 발생하는 픽업 조작의 시작을 나타내는 상기 차량의 조작을 검출하고;
상기 픽업 조작의 시작을 검출하는 것에 기초하여 상기 모니터링된 제1 차량 운전 파라미터와 관련된 저장된 데이터를 재설정하게 하는, 시스템.A system for operating a load handling vehicle comprising:
memory for storing executable instructions; and
a processor in communication with the memory;
Execution of executable instructions by the processor causes the processor to:
monitoring a first vehicle driving parameter during manual operation of the vehicle by an operator;
storing data related to the monitored first vehicle driving parameter, wherein the controller is configured to use the stored data to implement semi-automatic driving operation of the vehicle subsequent to manual operation of the vehicle;
detect operation of the vehicle indicating the start of a pick-up operation occurring during manual operation of the vehicle;
and resetting stored data related to the monitored first vehicle driving parameter based on detecting the onset of the pick-up operation.
상기 화물 취급 조립체에 의해 운반되는 화물의 길이와 적어도 동일한 거리에 대해 상기 하강된 화물 취급 조립체를 가진 차량의 이동으로서, 상기 제1 전환 후에 발생하는 상기 이동; 및
상기 하강된 화물 취급 조립체를 가진 이동하는 차량으로부터 새로 상승된 화물 취급 조립체를 가진 정지되는 차량으로의 제2 전환을 포함하는, 시스템.17. The method of claim 16, wherein the detected manipulation of the vehicle comprises: first switching from a manually operated vehicle with the raised load-handling assembly to a stationary vehicle with the lowered load-handling assembly;
movement of the vehicle with the lowered load handling assembly for a distance at least equal to the length of the load carried by the load handling assembly, the movement occurring after the first shift; and
and a second transition from a moving vehicle with the lowered load-handling assembly to a stationary vehicle with a newly raised load-handling assembly.
상기 조작자에 의한 차량의 수동 조작 동안 상기 제2 차량 운전 파라미터를 모니터링하고;
상기 모니터링된 제2 차량 운전 파라미터와 관련된 데이터를 저장하게 하며, 상기 컨트롤러는 상기 차량의 수동 조작에 후속하여 상기 차량의 반자동 운전 조작을 구현하기 위해 상기 모니터링된 제1 및 제2 차량 운전 파라미터의 저장된 데이터를 사용하도록 구성되는, 시스템.30. The method of any one of claims 16 to 29, wherein execution of an executable instruction by the processor causes the processor to:
monitoring the second vehicle driving parameter during manual operation of the vehicle by the operator;
store data related to the monitored second vehicle driving parameter, wherein the controller stores the monitored first and second vehicle driving parameters to implement semi-automatic driving operation of the vehicle subsequent to manual operation of the vehicle; A system configured to use data.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202062991217P | 2020-03-18 | 2020-03-18 | |
| US62/991,217 | 2020-03-18 | ||
| PCT/US2021/022281 WO2021188402A1 (en) | 2020-03-18 | 2021-03-15 | Based on detected start of picking operation, resetting stored data related to monitored drive parameter |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220155314A true KR20220155314A (en) | 2022-11-22 |
Family
ID=75581595
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227034811A KR20220155314A (en) | 2020-03-18 | 2021-03-15 | Reset stored data related to monitored operating parameters based on detected initiation of pick-up operation |
Country Status (7)
| Country | Link |
|---|---|
| EP (1) | EP4121386B1 (en) |
| KR (1) | KR20220155314A (en) |
| CN (1) | CN114761350A (en) |
| AU (1) | AU2021239825A1 (en) |
| CA (1) | CA3161726A1 (en) |
| MX (1) | MX2022006498A (en) |
| WO (1) | WO2021188402A1 (en) |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4227840B2 (en) * | 2003-05-29 | 2009-02-18 | 三菱重工業株式会社 | Travel control device for self-propelled industrial machinery |
| US8452464B2 (en) * | 2009-08-18 | 2013-05-28 | Crown Equipment Corporation | Steer correction for a remotely operated materials handling vehicle |
| US9522817B2 (en) * | 2008-12-04 | 2016-12-20 | Crown Equipment Corporation | Sensor configuration for a materials handling vehicle |
| KR101726209B1 (en) * | 2009-07-02 | 2017-04-12 | 크라운 이큅먼트 코포레이션 | Apparatus for remotely controlling a materials handling vehicle |
| US9547945B2 (en) * | 2011-03-18 | 2017-01-17 | The Raymond Corporation | Integration of an autonomous industrial vehicle into an asset management system |
| CN105060177A (en) * | 2015-08-12 | 2015-11-18 | 山东建筑大学 | Small stacking machine |
| EP3200482B1 (en) * | 2016-01-22 | 2019-12-18 | The Raymond Corporation | Systems and methods for a material handling vehicle network |
| CN105735166B (en) * | 2016-02-24 | 2017-11-07 | 同济大学 | A kind of traffic conic road-sign automatic deploying and retracting car |
| US9718661B1 (en) * | 2016-07-06 | 2017-08-01 | Hyster-Yale Group, Inc. | Automated load handling for industrial vehicle |
| US10233064B2 (en) * | 2016-07-06 | 2019-03-19 | Hyster-Yale Group, Inc. | Automated load handling for industrial vehicle |
| US10119272B1 (en) * | 2017-06-12 | 2018-11-06 | Amazon Technologies, Inc. | Interference frames |
| CN109808703B (en) * | 2019-01-15 | 2021-07-20 | 北京百度网讯科技有限公司 | Remote control method and device for automatic driving automobile |
-
2021
- 2021-03-15 KR KR1020227034811A patent/KR20220155314A/en active Search and Examination
- 2021-03-15 EP EP21720032.8A patent/EP4121386B1/en active Active
- 2021-03-15 CA CA3161726A patent/CA3161726A1/en active Pending
- 2021-03-15 MX MX2022006498A patent/MX2022006498A/en unknown
- 2021-03-15 WO PCT/US2021/022281 patent/WO2021188402A1/en unknown
- 2021-03-15 AU AU2021239825A patent/AU2021239825A1/en active Pending
- 2021-03-15 CN CN202180006985.7A patent/CN114761350A/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP4121386A1 (en) | 2023-01-25 |
| CA3161726A1 (en) | 2021-09-23 |
| WO2021188402A1 (en) | 2021-09-23 |
| MX2022006498A (en) | 2022-07-04 |
| CN114761350A (en) | 2022-07-15 |
| AU2021239825A1 (en) | 2022-05-26 |
| EP4121386B1 (en) | 2024-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9908527B2 (en) | Multiple zone sensing for materials handling vehicles | |
| US9207673B2 (en) | Finger-mounted apparatus for remotely controlling a materials handling vehicle | |
| US20240094728A1 (en) | Adaptive acceleration for materials handling vehicle | |
| USRE47554E1 (en) | Power assisted steering for motorized pallet truck | |
| US8452464B2 (en) | Steer correction for a remotely operated materials handling vehicle | |
| KR20140074390A (en) | Steer control maneuvers for materials handling vehicles | |
| CA2698056A1 (en) | System and method for dynamically maintaining the stability of a material handling vehicle having a vertical lift | |
| CA3004554A1 (en) | Multiple zone sensing for materials handling vehicles | |
| US11919761B2 (en) | Based on detected start of picking operation, resetting stored data related to monitored drive parameter | |
| CN114286796B (en) | Adaptive acceleration of materials handling vehicle | |
| KR20220155314A (en) | Reset stored data related to monitored operating parameters based on detected initiation of pick-up operation | |
| KR20220156012A (en) | Adaptive Acceleration for Material Handling Vehicles | |
| US20220137651A1 (en) | Adaptive acceleration for materials handling vehicle | |
| JPH09110392A (en) | Industrial vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination |