KR20200084609A - Rotating seat for vehicle and control method thereof - Google Patents
Rotating seat for vehicle and control method thereof Download PDFInfo
- Publication number
- KR20200084609A KR20200084609A KR1020190000705A KR20190000705A KR20200084609A KR 20200084609 A KR20200084609 A KR 20200084609A KR 1020190000705 A KR1020190000705 A KR 1020190000705A KR 20190000705 A KR20190000705 A KR 20190000705A KR 20200084609 A KR20200084609 A KR 20200084609A
- Authority
- KR
- South Korea
- Prior art keywords
- seat
- rotating
- vehicle
- controller
- sensor
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 44
- 238000013016 damping Methods 0.000 claims description 59
- 239000002184 metal Substances 0.000 claims description 46
- 238000001514 detection method Methods 0.000 claims description 30
- 230000008859 change Effects 0.000 claims description 15
- 230000001133 acceleration Effects 0.000 claims description 12
- 238000004891 communication Methods 0.000 claims description 9
- 230000007423 decrease Effects 0.000 claims description 6
- 230000000452 restraining effect Effects 0.000 claims description 5
- 230000002996 emotional effect Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 230000005684 electric field Effects 0.000 description 5
- 238000003745 diagnosis Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000005674 electromagnetic induction Effects 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 210000003195 fascia Anatomy 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000010985 leather Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/04—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable
- B60N2/14—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable rotatable, e.g. to permit easy access
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/0224—Non-manual adjustments, e.g. with electrical operation
- B60N2/02246—Electric motors therefor
-
- B60N2/0232—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/0224—Non-manual adjustments, e.g. with electrical operation
- B60N2/0244—Non-manual adjustments, e.g. with electrical operation with logic circuits
- B60N2/0268—Non-manual adjustments, e.g. with electrical operation with logic circuits using sensors or detectors for adapting the seat or seat part, e.g. to the position of an occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/0224—Non-manual adjustments, e.g. with electrical operation
- B60N2/0244—Non-manual adjustments, e.g. with electrical operation with logic circuits
- B60N2/0272—Non-manual adjustments, e.g. with electrical operation with logic circuits using sensors or detectors for detecting the position of seat parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/04—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable
- B60N2/12—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable slidable and tiltable
-
- B60N2002/0268—
-
- B60N2002/0272—
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Seats For Vehicles (AREA)
Abstract
Description
본 발명은 차량용 회전시트 및 그 제어방법에 관한 것이다.The present invention relates to a rotating seat for a vehicle and a control method therefor.
일반적으로 차량용 시트는 차량의 전후 방향으로 다수 개가 열을 이루도록 설치할 수 있다. 이러한 차량용 시트는 전후 방향으로 이동이 가능하며, 등받이가 기울어지도록 각도 조절이 가능하다. In general, a vehicle seat can be installed so that a plurality of rows form a row in the front-rear direction of the vehicle. Such a vehicle seat can be moved in the front-rear direction, and the angle can be adjusted so that the backrest is tilted.
또한, 종래 차량용 시트는 일부 차량을 제외하고 시계 또는 반 시계 방향으로 180도 회전시킬 수 없어서 차량 내부 공간을 다양하게 활용하기 어려운 단점이 있다.In addition, the conventional vehicle seat has a disadvantage in that it cannot be rotated 180 degrees in a clockwise or counterclockwise direction except for some vehicles, making it difficult to utilize various spaces inside the vehicle.
최근 자율주행 자동차 등의 개발과 연구가 활발히 진행되면서, 차량의 실내 공간을 활용을 위하여 운전석을 포함한 차량 내부의 시트를 회전시키는 다양한 차량용 회전시트 기술이 공개되고 있다.Recently, as the development and research of autonomous vehicles, etc. have been actively conducted, various vehicle rotating seat technologies for rotating the seat inside the vehicle including the driver's seat have been disclosed to utilize the interior space of the vehicle.
이와 관련된 선행문헌정보는 아래와 같다. Prior literature information related to this is as follows.
본 발명의 목적은 간편하고 안전하게 차량의 시트를 자동으로 회전시킬 수 있는 차량용 회전시트 및 그 제어방법을 제공하는 것이다.An object of the present invention is to provide a vehicle rotation seat and a control method for the vehicle that can automatically and conveniently rotate the vehicle seat.
본 발명의 다른 목적은 다수의 센서로부터 감지되는 정보를 이용하여 안정적으로 시트를 회전시킬 수 있는 차량용 회전시트 및 그 제어방법을 제공하는 것이다. Another object of the present invention is to provide a vehicle rotating seat that can stably rotate a seat using information sensed from a plurality of sensors and a control method thereof.
본 발명의 또 다른 목적은 사용자의 감성적인 측면을 만족시킬 수 있는 고급화된 차량용 회전시트 및 그 제어방법을 제공하는 것이다.Another object of the present invention is to provide an advanced vehicle rotating seat and a control method thereof that can satisfy a user's emotional aspects.
상술한 목적을 달성하기 위한, 본 발명의 실시예에 따른 차량용 회전시트는, 사용자가 앉을 수 있는 시트, 상기 시트를 틸팅시킬 수 있는 틸팅축, 상기 시트를 전후 방향으로 이동시킬 수 있는 이동레일 및 상기 시트를 회전시킬 수 있는 회전판을 포함하는 차량용 회전시트에 있어서, 상기 틸팅축에 설치되어 상기 시트의 틸팅각도를 감지할 수 있는 등받이센서; 상기 이동레일에 설치되어 상기 시트의 전후 이동위치를 감지할 수 있는 롱슬라이드센서; 상기 회전판에 설치되어 상기 시트의 회전각도를 감지할 수 있는 회전센서; 및 상기 시트의 회전 동작을 제어하는 제어기를 포함하며, 상기 제어기는, 상기 등받이센서 및 상기 롱슬라이드센서로부터 감지되는 정보를 기초로 상기 시트가 회전가능포지션에 위치하는지 판단하고, 상기 회전가능포지션에 상기 시트가 위치하는 경우, 상기 회전판이 회전되도록 제어하는 것을 특징으로 한다.In order to achieve the above object, a vehicle rotating seat according to an embodiment of the present invention includes a seat on which a user can sit, a tilting shaft capable of tilting the seat, a moving rail capable of moving the seat forward and backward, and A rotating seat for a vehicle including a rotating plate capable of rotating the seat, comprising: a backrest sensor installed on the tilting shaft to detect a tilting angle of the seat; A long slide sensor installed on the moving rail to detect a front and rear moving position of the seat; A rotation sensor installed on the rotating plate to detect a rotation angle of the sheet; And a controller that controls the rotational motion of the seat, wherein the controller determines whether the seat is located in a rotatable position based on information sensed by the backrest sensor and the long slide sensor, and the rotatable position. When the seat is located, it is characterized in that the rotating plate is controlled to rotate.
또한, 상기 등받이센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 틸팅축에 결합되는 타겟금속을 더 포함하며, 상기 등받이센서는 상기 틸팅축과 함께 회전하는 상기 타겟금속에 의하여 상기 시트의 틸팅각도를 감지하는 것을 특징으로 한다.In addition, the target metal is further coupled to the tilting axis so as to be spaced apart by a predetermined distance (d) from the backrest sensor, the backrest sensor tilting angle of the sheet by the target metal rotating with the tilting axis It is characterized by sensing.
또한, 상기 롱슬라이드센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 이동레일에 결합되는 레일타켓금속을 더 포함하며, 상기 롱슬라이드센서는 상기 이동레일과 함께 전후로 이동하는 상기 레일타겟금속에 의하여 상기 시트의 전후 이동위치를 감지하는 것을 특징으로 한다.In addition, further comprising a rail target metal coupled to the moving rail to be spaced a predetermined distance (d) from the long slide sensor, the long slide sensor is moved by the rail target metal to move back and forth with the moving rail. It is characterized in that it detects the front and rear movement position of the sheet.
또한, 상기 회전판의 중심에 구비되며, 상기 회전판의 회전에 독립적으로 고정된 위치를 유지하는 회전축; 및 상기 회전센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 회전판에 결합되는 회전타겟금속을 더 포함하며, 상기 회전센서는 상기 회전축에 결합되며, 상기 회전판과 함께 회전하는 상기 회전타겟금속에 의하여 상기 시트의 회전각도를 감지하는 것을 특징으로 한다.In addition, it is provided in the center of the rotating plate, a rotating shaft that maintains a fixed position independent of the rotation of the rotating plate; And a rotating target metal coupled to the rotating plate so as to be spaced apart from the rotating sensor by a predetermined distance (d), wherein the rotating sensor is coupled to the rotating shaft and is rotated by the rotating target metal rotating together with the rotating plate. It is characterized by sensing the rotation angle of the sheet.
또한, 상기 회전판에 연결되어 상기 회전판이 회전하도록 구동력을 제공하는 회전모터를 더 포함하며, 상기 제어기는, 상기 회전모터의 출력이 상승 또는 하강하는 구간에서 가속도가 가변되도록 제어하는 것을 특징으로 한다.In addition, it further comprises a rotary motor connected to the rotating plate to provide a driving force to rotate the rotating plate, wherein the controller is characterized in that to control the acceleration to be variable in the section where the output of the rotating motor rises or falls.
또한, 상기 회전모터는 브러시리스(BLDC)모터를 포함할 수 있다.In addition, the rotating motor may include a brushless (BLDC) motor.
또한, 상기 제어기는, 상기 회전센서로부터 감지되는 회전각도를 기초로 상기 회전모터의 출력을 제어하는 것을 특징으로 한다.In addition, the controller is characterized in that for controlling the output of the rotating motor based on the rotation angle detected by the rotation sensor.
또한, 상기 제어기는, 상기 시트가 상기 회전가능포지션을 벗어난 경우, 상기 시트를 상기 회전가능포지션으로 이동시키기 위해 상기 이동레일에 설치되는 전후모터 및 상기 틸팅축에 설치되는 경사모터를 제어하는 것을 특징으로 한다.In addition, the controller, when the seat is out of the rotatable position, to control the front and rear motors installed on the moving rail and the inclined motor installed on the tilting shaft to move the seat to the rotatable position Is done.
또한, 차량에 설치되는 다수의 센서로부터 감지된 정보를 기초로 차량의 상태를 관리하기 위한 진단장치를 더 포함하며, 상기 다수의 센서는, 도어감지센서, 파킹감지센서 및 속도감지센서 중 적어도 어느 하나를 포함할 수 있다.In addition, further comprising a diagnostic device for managing the state of the vehicle based on information detected from a plurality of sensors installed in the vehicle, the plurality of sensors, door detection sensor, parking detection sensor and at least any one of the speed detection sensor It can contain one.
또한, 상기 제어기는, 상기 진단장치와 정보를 송수신 할 수 있는 통신모듈을 포함할 수 있다.In addition, the controller may include a communication module capable of transmitting and receiving information to and from the diagnostic device.
또 다른 관점에서 본 발명의 실시예에 따른 차량용 회전시트의 제어방법은, 차량의 내부에 설치된 시트를 회전시키기 위한 초기조건을 확인하는 단계; 상기 시트의 틸팅각도를 감지하는 등받이센서와 상기 시트의 전후 이동위치를 감지하는 롱슬라이드센서에 의해 감지된 정보를 기초로 상기 시트가 회전가능포지션에 위치하는지 판단하는 단계; 상기 시트의 회전을 제어하는 제어기의 상태를 감지하는 제어기 안전모드 실행단계; 상기 시트에 구비되는 회전판의 구속이 해제되는 단계; 상기 회전판에 연결된 회전모터가 작동되는 단계; 상기 회전모터의 작동에 따른 상기 시트의 회전 각도에 따라, 상기 회전모터의 출력을 펄스 폭 변조(PWM)로 제어하는 댐핑제어가 수행되는 단계; 및 상기 시트의 회전완료 여부를 판단하고, 상기 회전판을 다시 구속시키는 단계를 포함할 수 있다.In another aspect, a method of controlling a rotating seat for a vehicle according to an embodiment of the present invention includes: checking initial conditions for rotating a seat installed inside the vehicle; Determining whether the seat is positioned in a rotatable position based on information detected by a backrest sensor that senses the tilting angle of the seat and a long slide sensor that detects a front and rear movement position of the seat; A controller safety mode execution step of sensing a state of a controller that controls rotation of the seat; The step of releasing the restraint of the rotating plate provided on the sheet; Operating a rotating motor connected to the rotating plate; Damping control is performed to control the output of the rotating motor by pulse width modulation (PWM) according to the rotation angle of the sheet according to the operation of the rotating motor; And determining whether the sheet has been completely rotated, and restraining the rotating plate again.
또한, 상기 댐핑제어는, 상기 회전모터의 출력이 0V로부터 미리 설정된 최대출력까지 상승하는 댐핑스타트구간 및 상기 회전모터의 출력이 상기 미리 설정된 최대출력으로부터 OV까지 하강하는 댐핑스톱구간에서 수행되는 것을 특징으로 한다.In addition, the damping control is characterized in that the damping start section in which the output of the rotating motor rises from 0 V to a preset maximum output and a damping stop section in which the output of the rotating motor descends from the preset maximum output to OV. Is done.
또한, 상기 제어기는, 상기 댐핑스타트구간 및 상기 댐핑스톱구간에서 듀티비(duty ratio)를 가변하도록 상기 펄스 폭 변조(PWM)제어를 수행하는 것을 특징으로 한다.In addition, the controller, characterized in that for performing the pulse width modulation (PWM) control to vary the duty ratio (duty ratio) in the damping start section and the damping stop section.
또한, 상기 제어기는, 상기 댐핑스타트구간에서 상기 듀티비가 시간의 경과에 따라 점차 커지도록 제어하고, 상기 댐핑스톱구간에서 상기 듀티비가 시간의 경과에 따라 점차 작아지도록 제어하는 것을 특징으로 한다.In addition, the controller is characterized in that the duty ratio in the damping start section is controlled to gradually increase with the passage of time, and the duty ratio in the damping stop section is controlled to gradually decrease with the passage of time.
또한, 상기 제어기는, 상기 댐핑스타트구간 및 상기 댐핑스톱구간에서 상기 회전모터의 회전 가속도를 가변시키는 것을 특징으로 한다.In addition, the controller, characterized in that to vary the rotational acceleration of the rotating motor in the damping start section and the damping stop section.
또한, 상기 회전가능포지션에 위치하는지 판단하는 단계는, 상기 등받이센서로부터 상기 시트의 현 틸팅각도를 감지하는 단계; 상기 롱슬라이드센서로부터 상기 시트의 현 이동위치를 감지하는 단계; 및 상기 제어기가 상기 현 틸팅각도 및 상기 현 이동위치가 미리 설정된 범위를 만족하는지 판단하는 단계를 포함할 수 있다.In addition, determining whether it is located in the rotatable position comprises: detecting a current tilting angle of the seat from the backrest sensor; Detecting a current moving position of the sheet from the long slide sensor; And determining whether the current tilting angle and the current moving position satisfy a preset range.
또한, 상기 제어기는, 상기 현 틸팅각도 및 상기 현 이동위치가 미리 설정된 범위를 벗어난 경우, 상기 미리 설정된 범위를 만족하도록 상기 시트를 회동 또는 이동시키는 것을 특징으로 한다.In addition, the controller is characterized in that when the current tilting angle and the current movement position is out of a preset range, the seat is rotated or moved to satisfy the preset range.
또한, 상기 제어기 안전모드 실행단계는, 상기 제어기의 입력전류 및 상기 시트의 회전속도 변화율이 미리 설정된 안전조건을 만족하는지 판단하는 단계; 및 상기 회전모터의 과전류를 감지하기 위한 스톨조건 감지단계를 포함하며, 상기 제어기는, 상기 스톨조건이 감지되면 상기 회전모터를 정지시키는 것을 특징으로 한다.In addition, the controller safety mode execution step, determining whether the input current of the controller and the rate of change of the rotational speed of the seat satisfies a preset safety condition; And a stall condition sensing step for sensing the overcurrent of the rotating motor, wherein the controller stops the rotating motor when the stall condition is detected.
또한, 상기 제어기는, 상기 안전조건을 만족하지 못하거나 상기 스톨조건이 감지된 경우, 출력부로 안내가 출력되도록 제어하며, 차량 진단장치에 관련 정보를 전송하는 것을 특징으로 한다.In addition, when the safety condition is not satisfied or the stall condition is detected, the controller controls the output to be output to the output unit, and transmits related information to the vehicle diagnostic apparatus.
또한, 상기 초기조건을 확인하는 단계는, 차량의 도어 오픈 여부를 감지하는 도어감지센서, 차량의 주차여부를 감지하는 파킹감지센서 및 차량의 정차여부를 감지하는 속도감지센서 중 적어도 어느 하나의 센서로부터 감지된 정보를 기초로 판단하는 것을 특징으로 한다.In addition, the step of checking the initial conditions includes at least one of a door detection sensor detecting whether the vehicle is open, a parking detection sensor detecting whether the vehicle is parked, and a speed detection sensor detecting whether the vehicle is stopped. Characterized in that the judgment based on the information detected from.
본 발명을 따르면, 시트에 구비되는 다수의 센서로부터 감지되는 시트의 위치 또는 각도 정보를 이용하여 자동으로 회전가능 포지션을 판단하고 안정적인 회전을 수행 및 완료하도록 제어되기 때문에, 사용자 편의성을 향상시킬 수 있다.According to the present invention, it is possible to improve user convenience because it is controlled to automatically determine the rotatable position and perform and perform stable rotation using the position or angle information of the sheet sensed from a plurality of sensors provided in the seat. .
본 발명을 따르면, 시트의 회전을 수행하기 전에 다양한 초기 조건을 확인함으로써 안전성을 향상시킬 수 있다.According to the present invention, safety can be improved by confirming various initial conditions before performing rotation of the sheet.
본 발명을 따르면, 시트에 문제가 발생할 경우 차량 진단장치와 통신을 통해 내역을 기록하고 표시할 수 있으므로 차량의 통합적인 관리가 가능한 장점이 있다.According to the present invention, when a problem occurs in the seat, it is possible to record and display the details through communication with the vehicle diagnostic apparatus, thereby providing an integrated management of the vehicle.
본 발명을 따르면, 현 시트의 위치 및 현 시트의 각도를 기초로 회전시트의 회전 가능한 포지션 여부를 판단하여 사용자에게 제공하고, 회전 가능한 포지션으로 자동적으로 이동되기 때문에 사용이 편리한 장점이 있다.According to the present invention, it is possible to determine whether a rotatable position of the rotating sheet is provided based on the position of the current sheet and the angle of the current sheet, and provides it to the user.
본 발명을 따르면, 시트의 회전을 제어하는 제어기의 안전모드가 제공됨으로써 시트의 회전을 보다 안전하게 수행할 수 있는 장점이 있다. 즉, 제품의 신뢰성을 향상시킬 수 있다. According to the present invention, the safety mode of the controller for controlling the rotation of the sheet is provided, so that the rotation of the sheet can be performed more safely. That is, product reliability can be improved.
본 발명을 따르면, 회전모터의 작동과 정지를 수행하는 소정의 구간에서 댐핑(damping)제어를 수행함으로써 시트가 부드럽게 회전을 시작하고 종료할 수 있다. 따라서, 사용자의 감성적인 만족도를 향상시킬 수 있으며, 제품을 고급화시킬 수 있는 장점이 있다. According to the present invention, by performing damping control in a predetermined section to perform operation and stop of the rotating motor, the seat can smoothly start and end rotation. Therefore, it is possible to improve the emotional satisfaction of the user, and there is an advantage to improve the product.
도 1은 본 발명의 실시예에 따른 차량용 회전시트의 구성을 개략적으로 보여주는 도면
도 2는 본 발명의 실시예에 따른 차량용 회전시트의 제어 구성을 보여주는 블록도
도 3은 본 발명의 실시예에 따른 등받이센서의 구성 및 감지 원리를 보여주는 도면
도 4는 본 발명의 실시예에 따른 회전판 및 회전센서의 연결관계를 보여주는 도면
도 5는 본 발명의 실시예에 따른 이동레일 및 롱슬라이드센서의 연결관계를 보여주는 도면
도 6은 본 발명의 실시예에 따른 차량용 회전시트의 회전을 위한 제어방법을 보여주는 플로우 차트
도 7은 도 6의 초기조건확인(S10) 단계의 상세한 제어방법을 보여주는 플로우 차트
도 8은 도 6의 로테이션(S20) 단계의 상세한 제어방법을 보여주는 플로우 차트
도 9는 도 8의 회전가능포지션 판단(S100) 단계의 상세한 제어방법을 보여주는 플로우 차트
도 10은 도 8의 제어기 안전모드 실행(S200) 단계의 상세한 제어방법을 보여주는 플로우 차트
도 11은 본 발명의 실시예에 따른 댐핑(damping)제어를 보여주는 타이밍(timing) 차트
도 12는 도 11의 댐핑스타트구간(A)에서 시간 대비 모터 스피드(speed)를 비교해주는 그래프1 is a view schematically showing the configuration of a vehicle rotating seat according to an embodiment of the present invention
2 is a block diagram showing a control configuration of a vehicle rotating seat according to an embodiment of the present invention
3 is a view showing the configuration and detection principle of the backrest sensor according to an embodiment of the present invention
4 is a view showing a connection relationship between a rotating plate and a rotating sensor according to an embodiment of the present invention
5 is a view showing a connection relationship between a moving rail and a long slide sensor according to an embodiment of the present invention
Figure 6 is a flow chart showing a control method for the rotation of the rotating seat for a vehicle according to an embodiment of the present invention
7 is a flow chart showing a detailed control method of the initial condition check (S10) step of FIG.
8 is a flow chart showing a detailed control method of the rotation (S20) step of FIG.
9 is a flow chart showing a detailed control method of the rotatable position determination (S100) of FIG.
FIG. 10 is a flow chart showing a detailed control method of the controller safety mode execution (S200) step of FIG. 8.
11 is a timing chart showing damping control according to an embodiment of the present invention
12 is a graph comparing motor speed versus time in the damping start section A of FIG. 11;
이하, 본 발명의 일부 실시 예들을 예시적인 도면을 통해 상세하게 설명한다. 각 도면의 구성요소들에 참조부호를 부가함에 있어서, 동일한 구성요소들에 대해서는 비록 다른 도면상에 표시되더라도 가능한 한 동일한 부호를 가지도록 하고 있음에 유의해야 한다. 또한, 본 발명의 실시 예를 설명함에 있어, 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 발명의 실시 예에 대한 이해를 방해한다고 판단되는 경우에는 그 상세한 설명은 생략한다.Hereinafter, some embodiments of the present invention will be described in detail through exemplary drawings. It should be noted that in adding reference numerals to the components of each drawing, the same components have the same reference numerals as possible, even if they are displayed on different drawings. In addition, in describing embodiments of the present invention, when it is determined that detailed descriptions of related well-known configurations or functions interfere with understanding of the embodiments of the present invention, detailed descriptions thereof will be omitted.
또한, 본 발명의 실시 예의 구성 요소를 설명하는 데 있어서, 제 1, 제 2, A, B, (a), (b) 등의 용어를 사용할 수 있다. 이러한 용어는 그 구성 요소를 다른 구성 요소와 구별하기 위한 것일 뿐, 그 용어에 의해 해당 구성 요소의 본질이나 차례 또는 순서 등이 한정되지 않는다. 어떤 구성 요소가 다른 구성요소에 "연결", "결합" 또는 "접속"된다고 기재된 경우, 그 구성 요소는 그 다른 구성요소에 직접적으로 연결되거나 접속될 수 있지만, 각 구성 요소 사이에 또 다른 구성 요소가 "연결", "결합" 또는 "접속"될 수도 있다고 이해되어야 할 것이다.In addition, in describing the components of the embodiments of the present invention, terms such as first, second, A, B, (a), and (b) may be used. These terms are only for distinguishing the component from other components, and the nature, order, or order of the component is not limited by the term. When a component is described as being "connected", "coupled" or "connected" to another component, the component may be directly connected to or connected to the other component, but another component between each component It should be understood that may be "connected", "coupled" or "connected".
도 1은 본 발명의 실시예에 따른 차량용 회전시트의 구성을 개략적으로 보여주는 도면이고, 도 2는 본 발명의 실시예에 따른 차량용 회전시트의 제어 구성을 보여주는 블록도이다.1 is a view schematically showing a configuration of a vehicle rotating seat according to an embodiment of the present invention, and FIG. 2 is a block diagram showing a control configuration of a vehicle rotating seat according to an embodiment of the present invention.
도 1 및 도 2를 참조하면, 본 발명의 실시예에 따른 차량용 회전시트(1)는, 사용자가 등을 기대고 앉을 수 있는 시트(30), 상기 시트(30)의 전후 방향 이동을 가이드하는 이동레일(20) 및 상기 시트(30)를 시계 또는 반 시계 방향으로 회전시킬 수 있는 회전판(50)을 포함할 수 있다. 1 and 2, the vehicle
상기 이동레일(20)은 차량 내부의 바닥에 결합할 수 있다. 그리고 상기 이동레일(20)은 시트(30)의 양측 하단에 각각 위치하도록 한 쌍으로 구비될 수 있다.The moving
상기 이동레일(20)은 상기 시트(30)와 회전판(50)을 고정하는 지지판(미도시)과 결합할 수 있다. 여기서, 상기 지지판(미도시)은 사각 평판형 형상의 프레임으로 형성할 수 있다. 일례로, 상기 지지판(미도시)은 상기 한 쌍의 이동레일(20)의 전단 또는 후단을 각각 연결하도록 한 쌍으로 구비될 수 있다. The moving
상기 한 쌍의 이동레일(20) 및 지지판(미도시)은, 일반적으로 차량 바닥에 안정적으로 결합될 수 있다. 따라서, 상기 한 쌍의 이동레일(20) 및 지지판(미도시)의 상측으로 결합되는 회전판(50) 및 시트(30)의 구성들은 안정적으로 지지될 수 있다.The pair of moving
상기 시트(30)는 사용자가 착좌할 수 있도록 다수의 프레임이 연결되는 몸체 및 상기 몸체를 덮는 커버로 구비될 수 있다. 일례로, 상기 커버는 가죽 재질로 형성할 수 있다.The
상기 이동레일(20)은 상기 시트(30)의 하단부와 연결될 수 있다. 따라서, 상기 이동레일(20)은 상기 시트(30)의 전후 방향 이동을 가이드할 수 있다. 일례로, 상기 한 쌍의 이동레일(20)은 상기 시트(30)의 양측 하단 프레임과 각각 대응되도록 위치할 수 있다.The moving
상기 회전판(50)은 상기 시트(30)를 회전시키기 위한 회전 수단으로 구비될 수 있다. 즉, 상기 회전판(50)은 상기 시트(30)를 회전시기 위하여 회전 가능하도록 구비될 수 있다. 일례로, 상기 회전판(50)은 상기 시트(30)의 하측 내부 또는 상기 시트(30)의 하부의 중심에 설치될 수 있다. The rotating
상기 회전판(50)은, 상기 시트(30)와 결합을 가이드하고, 상기 이동레일(20)에 회전 가능하게 연결되도록 지지하는 상하 고정판(미도시)을 포함할 수 있다. The rotating
상기 상하 고정판은 상기 회전판(50)의 상부와 하부에 각각 위치할 수 있다. The upper and lower fixing plates may be located on upper and lower portions of the
상기 상하 고정판(미도시)은 환형의 판으로 형성할 수 있다. The upper and lower fixing plates (not shown) may be formed as annular plates.
구체적으로, 상기 회전판(50)의 하부에 위치하는 상하 고정판(미도시)은 하측으로 상기 이동레일(20) 및/또는 상술한 지지판(미도시)과 결합될 수 있다. 그리고 상기 하부에 위치하는 상하 고정판은 상기 회전판(50)의 회전에 독립적인 고정부분으로 이해할 수 있다. 따라서, 상기 회전판(50)의 하부에 위치하는 상하 고정판은 상기 이동레일(20)의 전후 이동에 따라 상기 시트(30)가 함께 이동할 수 있도록 가이드할 수 있다.Specifically, the upper and lower fixing plates (not shown) located at the lower portion of the
그리고 상기 회전판(50)의 상부에 위치하는 상하 고정판은 상측으로 상기 시트(30)의 착좌부를 형성하는 내부 프레임이 결합할 수 있다. 그리고 상기 상부에 위치하는 상하 고정판은 회전판(50)의 회전에 종속되는 회전부분으로 이해할 수 있다. 따라서, 상기 상부에 위치하는 상하 고정판은 후술할 회전모터(55)의 작동에 따라 회전하게 되므로, 상기 시트(30)가 함께 회전할 수 있도록 가이드할 수 있다.And the upper and lower fixing plates located on the upper portion of the
또한, 상기 회전판(50)은 상기 시트(30) 또는 상기 이동레일(20)과 안정적인 연결을 유지하기 위하여 다수의 베어링을 더 포함할 수 있다.In addition, the rotating
상기 시트(30)는 사용자가 앉는 착좌부와 사용자가 앉은 상태로 등을 기대는 등받이부를 포함할 수 있다. 상기 착좌부와 상기 등받이부는 일체로 형성할 수 있다. The
여기서, 상기 등받이부는 사용자의 조작에 따라 경사 각도가 조절되도록 구비될 수 있다. Here, the backrest portion may be provided to adjust the inclination angle according to the user's operation.
즉, 상기 시트(30)는 틸팅(tilting) 가능하도록 구비될 수 있다. That is, the
그리고 상기 시트(30)는 틸팅을 위한 틸팅축(35)을 더 포함할 수 있다. 일례로, 상기 틸팅축(25)은 상기 착좌부와 상기 등받이부가 연결되는 연결 부분의 일 측 방향으로 돌출되도록 위치할 수 있다. In addition, the
그리고 상기 틸팅축(25)은 상기 착좌부로부터 상기 등받이부의 경사 각도가 단계적으로 조절되도록 회전 가능하게 구비될 수 있다.In addition, the tilting shaft 25 may be rotatably provided so that the inclination angle of the backrest portion is adjusted stepwise from the seating portion.
한편, 상기 차량용 회전시트(1)는 상기 시트(30)의 틸팅 또는 경사 각도를 감지할 수 있는 등받이센서(100)를 더 포함할 수 있다. Meanwhile, the
상기 등받이센서(100)는 상기 시트(30)의 틸팅 각도를 감지할 수 있다. 상세히, 상기 등받이센서(100)는 틸팅 가능하도록 구비되는 시트(30)의 기준 위치로부터 회동한 각도를 검출하여 후술할 제어기(300)로 전송할 수 있다. The
즉, 상기 등받이센서(100)는 상기 시트(30)의 등받이부의 위치를 감지할 수 있다. 이에 의하면, 상기 시트(30)의 등받이부 각도가 회전 가능한 허용 각도를 벗어나서 상기 시트(30)의 회전시 간섭을 일으키는 문제를 방지할 수 있다.That is, the
상기 등받이센서(100)는 상기 시트(30)의 측 단부에 설치할 수 있다. 상세히, 상기 등받이센서(100)는 상기 틸팅축(25)과 대응되도록 위치할 수 있다. 일례로, 상기 등받이센서(100)는 상기 착좌부와 상기 등받이부가 연결되는 연결 부분의 일 측에 상기 틸팅축(25)과 연결되도록 설치할 수 있다. The
즉, 상기 등받이센서(100)는 상기 틸팅축(25)과 결합할 수 있다. 일례로, 상기 등받이센서(100)의 중심에는 상기 틸팅축(25)이 관통되도록 위치할 수 있다. 이와 관련된 상기 등받이센서(100)의 상세한 설명은 도 3에서 후술하도록 한다. That is, the
또한, 상기 차량용 회전시트(1)는 상기 시트(30)의 전후 방향으로 이동된 위치를 감지할 수 있는 롱슬라이드센서(200)를 더 포함할 수 있다.In addition, the
상기 롱슬라이드센서(200)는 상기 시트(30)의 전후 방향 이동 여부를 검출할 수 있다. 또한, 상기 롱슬라이드센서(200)는 상기 시트(30)가 전방 또는 후방으로 이동한 경우, 기준 위치로부터의 거리를 검출할 수 있다. 그리고 상기 롱슬라이드센서(200)는 검출 정보를 후술할 제어기(300)로 전송할 수 있다.The
즉, 상기 롱슬라이드센서(200)는 상기 시트(30)의 착좌부의 위치를 감지할 수 있다. 상세히, 상기 롱슬라이드센서(200)는 상기 이동레일(20)에 의하여 이동되는 상기 시트(30)의 착좌부가 얼마만큼 전방 또는 후방으로 이동되어 위치하는지 검출할 수 있다. 이에 의하면, 상기 시트(30)의 착좌부가 회전 가능한 허용 위치를 벗어나서 회전시 간섭을 일으키는 문제를 방지할 수 있다. That is, the
상기 롱슬라이드센서(200)는 상기 이동레일(20)에 설치할 수 있다. 일례로, 상기 롱슬라이드센서(200)는 상기 이동레일(20)의 측단을 따라 소정의 거리(d)만큼 외측으로 이격되도록 설치할 수 있다. 보다 상세히, 상기 롱슬라이드센서(200)는 상기 이동레일(20)의 고정부분과 결합될 수 있다. The
여기서, 상기 이동레일(20)의 고정부분은 차량의 바닥에 결합되어 상기 이동레일(20)의 전후 이동 동작에서도 움직이지 않고 고정되는 부분으로 이해할 수 있다. 따라서, 상기 롱슬라이드센서(200)는 상기 이동레일(20)의 이동 동작에도 고정 상태를 유지함으로써, 상기 이동레일(20)이 기준 위치로부터 상대적으로 얼마만큼 이동했는지 검출할 수 있다. 이와 관련된 상기 롱슬라이드센서(200)의 상세한 설명은 도 5의 설명에서 후술하도록 한다. Here, the fixed portion of the moving
상기 등받이센서(100) 및 상기 롱슬라이드센서(200)는, 상기 시트(30)의 기준 위치로부터 상대적으로 이동된 위치를 검출할 수 있다. 상세히, 상기 등받이센서(100)는 상기 등받이부의 기준 위치로부터 회동 각도를 검출하며, 상기 롱슬라이드센서(200)는 상기 착좌부의 기준 위치로부터 전방 또는 후방으로 이동 거리를 검출한다. 즉, 상기 검출된 회동 각도 및 이동 거리는 상기 시트(30)의 현 각도 및 현 위치로 이해할 수 있다. The
그리고 후술할 제어기(300)는 상기 시트(30)의 현 각도 및 현 위치가 포지션 조건을 만족하는지 판단할 수 있다. 여기서, 상기 포지션 조건은 시트(30)의 회전이 다른 물체에 의한 간섭 없이 수행될 수 있는 미리 설정된 시트(30)의 각도 및 위치로 규정된다.In addition, the
그리고 상기 포지션 조건은 차량의 크기, 시트(30)의 설치 위치 등 차량의 설계 조건에 따라 미리 설정되어 상기 제어기(300)의 내부 메모리(미도시)에 저장될 수 있다.In addition, the position condition may be set in advance according to a vehicle design condition such as the size of the vehicle and the installation position of the
상기 포지션 조건은 범위로 설정될 수 있다. 따라서, 상술한 시트(30)의 기준 위치는 상기 포지션 조건에 포함될 수 있다. 일례로, 상기 포지션 조건은 상기 기준 위치를 기준으로 허용 가능한 전후 이동 거리 및 허용 가능한 회동 각도로 설정될 수 있다. The position condition may be set to a range. Therefore, the reference position of the above-described
이에 의하면, 상기 차량용 시트(1)는 상기 포지션 조건을 만족한 경우에 회전 동작을 수행하도록 제어하므로 차량 내부의 다른 물체에 의한 간섭에 의해 발생할 수 있는 문제를 방지할 수 있다. According to this, since the
한편, 상기 시트(30)가 차량의 전방을 향하여 배치되는 위치를 노멀포지션(normal position)이라 이름할 수 있다. 그리고 상기 노멀포지션으로부터 180도 회전한 위치를 리버스포지션(reverse position)이라 이름할 수 있다.Meanwhile, a position in which the
즉, 상기 시트(30)는 상기 회전판(50)에 의해 상기 노멀포지션에서 상기 리버스포지션으로 또는 상기 리버스포지션에서 상기 노멀포지션으로 회전(rotation)할 수 있다.That is, the
따라서, 상기 포지션 조건은 상기 노멀포지션 뿐만 아니라 상기 리버스포지션에서도 판단할 수 있다. Therefore, the position condition can be determined not only in the normal position, but also in the river position.
상기 차량용 회전시트(1)는 상기 시트(30)의 회전 위치를 감지할 수 있는 회전센서(500)를 더 포함할 수 있다. The
상기 회전센서(500)는 상기 회전판(50)의 회전 위치를 감지할 수 있다. 결국, 상기 회전센서(500)는 상기 시트(30)의 회전 위치를 감지할 수 있다. The
여기서, 상기 시트(30)의 회전 위치는, 상기 회전판(50)의 기준 위치(또는 지점)으로부터 몇 도(degree)만큼 회전된 위치인지 회전 각도로 제공될 수 있다. Here, the rotational position of the
상세히, 상기 회전센서(500)는 상기 회전판(50)의 기준 위치(또는 기준 지점)로부터 회전 각도를 검출하여 후술할 제어기(300)로 전송할 수 있다. 따라서, 제어기(300)는 상기 회전센서(500)로부터 검출된 회전 각도 정보를 기초로 상기 시트(30)의 회전 상태를 판단할 수 있고, 시트(30)의 회전 속도를 제어할 수 있다. In detail, the
이에 의하면, 상기 시트(30)의 회전 시작과 회전 종료를 감지할 수 있다. 또한, 상기 시트(30)가 회전 중인 경우, 상기 기준 위치로부터 얼마만큼 회전하였는지 회전 각도를 검출할 수 있다. According to this, it is possible to detect the start and end of rotation of the
또한, 상기 회전센서(500)가 상기 시트(30)의 회전 위치를 감지할 수 있으므로, 상기 제어기(300)는 상기 시트(30)의 회전 각도에 따라 후술할 회전모터(55)의 출력을 제어할 수 있다. 따라서, 상기 시트(30)의 회전 시작 및 회전 종료 구간에서 회전모터(55)의 출력을 제어함으로써 부드럽고 고급적인 회전을 사용자에게 제공할 수 있다. In addition, since the
상기 회전센서(500)는 상기 회전판(50)의 중심부에 설치할 수 있다. 상세히, 상기 회전센서(500)는 상기 회전판(50)의 중심 축인 회전축(55)과 결합할 수 있다. 그리고 상기 회전센서(500)는 상기 회전축(55)을 기준으로 시계 또는 반 시계 방향으로 회전하는 회전판(50)의 회전 각도를 감지할 수 있다.The
상기 회전센서(500)는 상기 회전축(55)이 중심을 삽입 및 관통하도록 구비될 수 있다. 이와 관련된 상기 등받이센서(100)의 상세한 설명은 도 4에서 후술하도록 한다.The
한편, 상기 차량용 회전시트(1)는 사용자의 조작에 따라 입력 신호를 제공할 수 있는 입력스위치(60)를 더 포함할 수 있다. Meanwhile, the
상기 입력스위치(60)는 전자식 버튼, 터치식 디스플레이 등을 포함할 수 있다. 일례로, 사용자가 상기 입력스위치(60)를 누르거나 터치하는 등 조작을 수행하면 상기 입력스위치(60)는 입력 신호를 발생시켜 제어기(300)로 제공할 수 있다.The
또한, 상기 입력스위치(60)는 상기 시트(30)가 회전 중인 상태에서 물체가 끼는 등 긴급 상황이 발생한 경우, 상기 시트(30)의 회전이 즉각적으로 멈출 수 있도록 제어기(300)로 긴급 신호를 제공할 수 있다. In addition, the
상기 차량용 회전시트(1)는 전원을 제공하는 파워모듈(80)을 더 포함할 수 있다. 상기 파워모듈(80)은 제어기(300)와 전기적으로 연결될 수 있다. 그리고 상기 파워모듈(80)은 상기 제어기(300)로 전원을 공급할 수 있다. The
상기 차량용 회전시트(1)는 상기 시트(30)의 동작을 제어하기 위한 제어기(300)를 더 포함할 수 있다.The
상기 시트(30)의 동작은 전후 이동, 틸팅 및 회전을 포함할 수 있다. 즉, 상기 제어기(300)는 상기 시트(30)의 전후 이동, 회동 각도 및 회전 각도 중 적어도 어느 하나를 제어할 수 있다. The operation of the
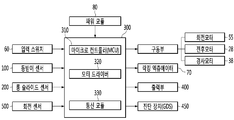
상세히, 상기 제어기(300)는 상기 입력스위치(60), 상기 등받이센서(100), 상기 롱슬라이드센서(200) 및 상기 회전센서(500)로부터 입력되는 신호 또는 정보를 처리하여, 상기 시트(30)의 동작을 제어하기 위한 제어 신호를 제공할 수 있다. 일례로, 상기 제어기(300)는 구동부(28,38,55)로 제어 신호를 전송하여 상기 시트(30)의 전후 이동, 회동 각도 및 회전 각도를 제어할 수 있다.In detail, the
상기 제어기(300)는 입력 신호 또는 입력 정보를 처리하기 위한 마이크로컨트롤러(310,MCU)를 포함할 수 있다.The
상기 마이크로컨트롤러(310)는 입력스위치(60), 등받이센서(100), 롱슬라이드센서(200), 회전센서(500) 등으로부터 입력되는 정보를 로직(logic)을 이용하여 연산, 판단 및 처리할 수 있다. The
또한, 상기 제어기(300)는 구동부(28,38,55)를 제어하기 위한 모터 드라이버(320)를 더 포함할 수 있다.In addition, the
상기 모터 드라이버(320)는 상기 구동부(28,38,55)를 구성하는 각각의 모터를 제어하기 위해 구비될 수 있다. 즉, 상기 모터 드라이버(320)는 상기 구동부(28,38,55)의 각각의 모터에 알맞은 전류와 신호를 제공할 수 있다.The
상기 모터 드라이버(320)는 게이트드라이버(gate driver) 및 드라이브 스테이지(FET drive stage)를 구비할 수 있다. The
상기 차량용 회전시트(1)는 구동부(28,38,55)를 더 포함할 수 있다.The
상기 구동부는 상기 시트(30)를 회전시키기 위한 회전모터(55)를 포함할 수 있다. The driving unit may include a
상기 회전모터(55)는 상기 회전판(50)에 설치할 수 있다. 그리고 상기 회전모터(55)는 상기 회전판(50)이 회전되도록 구동력을 제공할 수 있다.The
상기 회전모터(55)는 상기 제어기(300)로부터 전달받은 제어 신호에 의하여 작동할 수 있다. 일례로, 상기 제어기(300)는 상기 회전모터(55)의 출력을 상기 회전센서(500)로부터 전달받은 회전판(50)의 위치를 기초로 가변하도록 제어할 수 있다.The
상기 회전모터(55)는 브러시리스(BLDC) 모터를 포함할 수 있다. The
상기 회전모터(55)가 브러시리스 모터로 구비되는 경우, 상기 제어기(300)의 모터드라이버(320)는 모터의 전기적 특성을 활용하여 자석의 위치를 내부적으로 추정한 후 속도를 제어할 수 있다. When the
즉, 상기 제어기(300)는 상기 회전모터(55)를 센서리스 제어를 통하여 작동시킬 수 있다.That is, the
따라서, 상기 제어기(300)는 상기 회전모터(55)가 브러시리스 모터로 구비되는 경우, 상기 회전모터(55)의 홀(hall) 센서 고장시 상기 센서리스 제어를 통하여 작동을 제어할 수 있다.Accordingly, when the
상기 회전판(50)은 상기 회전모터(55)의 작동에 의해 시계(정회전) 또는 반 시계(역회전) 방향으로 회전할 수 있다. 이에 의하여, 상기 시트(30)는 상기 노멀포지션 또는 상기 리버스포지션으로부터 회전할 수 있다.The rotating
또한, 상기 구동부는 상기 시트(30)의 전후 방향 이동을 위한 전후모터(28) 및 상기 시트(30)의 틸팅을 위한 경사모터(38)를 더 포함할 수 있다.In addition, the driving unit may further include a front and
상기 전후모터(28)는 상기 이동레일(20)에 설치할 수 있다. 그리고 상기 전후모터(28)는 상기 이동레일(20)이 전후 방향으로 이동되도록 구동력을 제공할 수 있다. The front-
상기 전후모터(28)는 상기 제어기(300)로부터 전달받은 제어 신호에 의하여 작동할 수 있다. 일례로, 상기 제어기(300)는 상기 전후모터(28)를 정회전하도록 제어함으로써, 상기 이동레일(20)을 전방으로 이동시킬 수 있다. 그리고 상기 제어기(300)는 상기 전후모터(28)를 역회전하도록 제어함으로써, 상기 이동레일(20)을 후방으로 이동시킬 수 있다. The front-
즉, 상기 전후모터(38)의 작동에 의하여, 상기 시트(30)는 전방 또는 후방으로 위치가 이동될 수 있다.That is, by the operation of the front-
상기 경사모터(38)는 상기 시트(30)에 설치할 수 있다. 일례로, 상기 경사모터(38)는 상기 시트(30)의 등받이부에 설치할 수 있다. The
상기 경사모터(38)는 상기 틸팅축(35)과 결합할 수 있다. 따라서, 상기 경사모터(38)의 작동에 의하여 상기 등받이부는 회동할 수 있다. 즉, 상기 경사모터(38)는 상기 시트(30)가 틸팅되도록 구동력을 제공할 수 있다. The
상기 경사모터(38)는 상기 제어기(300)로부터 전달받은 제어 신호에 의하여 작동할 수 있다. 일례로, 상기 제어기(300)는 상기 경사모터(38)를 정회전 또는 역회전하도록 제어함으로써 상기 틸팅의 정도, 즉, 상술한 회동 각도를 조절할 수 있다. The
상기 차량용 회전시트(1)는 상기 시트(30)의 회전을 구속할 수 있는 락킹엑츄에이터(70)를 더 포함할 수 있다.The
상기 락킹엑츄에이터(70)는 상기 회전판(50)의 작동을 구속시킬 수 있는 장치로 이해할 수 있다. 일례로, 상기 락킹엑츄에이터(70)는, 상기 제어기(300)의 제어 신호에 의해 작동될 수 있다. The locking
상기 락킹엑츄에이터(70)는 전기적 신호에 의해 구동되는 모터, 기어, 커버케이스 및 기어돌기를 포함할 수 있다. 일례로, 상기 락킹엑츄에이터(70)는 상기 회전판(50)을 상하 방향으로 이동시킴으로써 상기 회전판(50)이 회전되지 않도록 구속시키거나, 또는 회전이 수행되도록 구속을 해제시킬 수 있다. The locking
상기 차량용 회전시트(1)는 각종 정보를 시각적 또는 청각적으로 제공할 수 있는 출력부(400)를 더 포함할 수 있다. The
상기 출력부(400)는 각종 안내 메시지 또는 안내 영상으로 출력할 수 있는 디스플레이 장치를 포함할 수 있다. 여기서, 상기 디스플레이 장치는 차량의 센터페시아 등에 배치될 수 있다. 또한, 출력부(400)는 안내 메시지를 소리로 출력하는 스피커를 포함할 수 있다.The
상기 출력부(400)는 제어기(300)로부터 입력되는 신호에 따라 제어될 수 있다.The
상기 차량용 회전시트(1)는 차량의 이상 징후 내역, 고장 유무 등 차량의 상태를 관리할 수 있는 진단장치(450)를 더 포함할 수 있다.The
다만, 상기 진단장치(450)는 상기 차량용 회전시트(1)에 대한 진단을 수행하는 기능으로 한정되지 않는다. 즉, 상기 진단장치9450)는 차량의 전반적인 상태를 판단, 진단 및 관련 내용을 저장할 수 있는 기능을 수행할 수 있다. However, the diagnostic device 450 is not limited to a function of performing a diagnosis on the
상기 제어기(300)는, 상기 진단장치(450)로 상기 차량용 회전시트(1)의 비정상적인 정보를 제공할 수 있다. 또한, 상기 제어기(300)는 상기 진단장치(450)로부터 전달받은 정보가 상기 출력부(400)에 출력되도록 제어할 수 있다.The
한편, 상기 제어기(300)는 차량에 설치된 다수의 센서로부터 감지된 정보를 송수신 할 수 있는 통신모듈(330)을 더 포함할 수 있다.Meanwhile, the
상기 통신모듈(330)은 차량의 각종 상태를 검출하는 다수의 센서와 정보를 송수신 할 수 있다. 일례로, 상기 통신모듈(330)은 차량의 진단장치(450, GDS)와 고속통신(HS-CAN) 방식으로 통신할 수 있다.The
상세히, 상기 차량의 각종 상태를 검출하는 다수의 센서는 감지 정보를 차량의 진단장치(450,GDS)로 전송할 수 있다. 그리고 상기 진단장치(450)는 상기 통신모듈(330)과 유무선 통신이 가능하도록 연결되기 때문에 상기 다수의 센서로부터 감지된 정보를 제어기(300)로 제공할 수 있다. 따라서, 상기 제어기(300)는 상기 다수의 센서로부터 감지된 정보를 이용하여 상기 차량용 회전시트(1)의 회전 동작을 제어할 수 있다.In detail, a plurality of sensors detecting various states of the vehicle may transmit detection information to the vehicle's diagnostic devices 450 and GDS. In addition, since the diagnostic device 450 is connected to the
여기서, 상기 차량의 각종 상태를 검출하는 다수의 센서에는, 도어감지센서, 파킹감지센서 및 속도감지센서를 포함할 수 있다. Here, a plurality of sensors for detecting various states of the vehicle may include a door detection sensor, a parking detection sensor, and a speed detection sensor.
상기 도어감지센서는 차량의 도어가 오픈(open)된 상태인지 여부를 검출하는 센서로 구비될 수 있다. 일례로, 상기 도어감지센서는 도어와 차량의 바디 사이에 설치될 수 있다. The door detection sensor may be provided as a sensor that detects whether a door of a vehicle is in an open state. In one example, the door detection sensor may be installed between the door and the body of the vehicle.
상기 파킹감지센서는 사용자가 시트에 안전하게 앉을 수 있는 상황 여부를 판단하기 위해 차량의 기어와 연결되어 기어의 위치가 P(Parking)에 위치하는지 검출할 수 있다.The parking detection sensor is connected to a vehicle gear to determine whether a user can safely sit on the seat and detect whether the position of the gear is located at P (Parking).
상기 속도감지센서는 차량의 속도를 검출하는 계기판, 내비게이션 등과 연결될 수 있다. 상기 속도감지센서는 차량의 현재 속도를 검출할 수 있다. The speed sensor may be connected to an instrument panel for detecting the speed of the vehicle, navigation, and the like. The speed sensor may detect the current speed of the vehicle.
따라서, 상기 제어기(300)는 차량이 완전히 멈추고, 주차 상태인지 확인한 후 도어의 오픈(open)여부를 판단함으로써, 현재 시트(30)를 회전시킬 수 있는 상황인지 판단할 수 있다.Accordingly, the
한편, 상기 차량용 회전시트(1)는 상기 시트(30)에 탑승자가 앉아 있는지 감지할 수 있는 착좌센서(미도시)를 더 포함할 수 있다.Meanwhile, the
상기 착좌센서는 상기 시트(30)를 회전시키기 전에, 상기 시트(30)에 사용자가 앉아 있는지 여부를 감지할 수 있다. 만약, 사용자가 시트(30)에 앉아 있음에도 회전판(50)이 회전을 수행하게 된다면, 안전사고가 발생할 우려가 있다.The seating sensor may detect whether a user is sitting on the
따라서, 상기 제어기(300)는 상기 착좌센서로부터 감지 정보를 전송 받아 상기 시트(30)에 사용자의 착좌 여부를 판단하고 시트(30)를 회전(로테이션) 시킬 수 있다. Accordingly, the
상기 도어감지센서, 파킹감지센서 및 속도감지센서는 사용자를 감지하는 초음파 센서, 적외선 센서 등으로 구비될 수 있다. 물론, 상기 착좌센서는 무게감지센서로 구비될 수도 있다.The door detection sensor, parking detection sensor and speed detection sensor may be provided as an ultrasonic sensor, an infrared sensor, and the like to detect a user. Of course, the seating sensor may be provided as a weight sensor.
도 3은 본 발명의 실시예에 따른 등받이센서의 구성 및 감지 원리를 보여주는 도면이다. 보다 상세히, 도 3(a)는 상기 등받이센서(100)와 상기 틸팅축(35)이 결합된 모습을 옆에서 바라본 측면도이며, 도 3(b)는 상기 등받이센서(100)와 상기 틸팅축(35)이 결합된 모습을 위에서 내려다본 평면도이다. 3 is a view showing the configuration and detection principle of the backrest sensor according to an embodiment of the present invention. In more detail, FIG. 3(a) is a side view of the
도 3을 참조하면, 상기 등받이센서(100)는 상기 틸팅축(35)이 삽입 또는 관통하도록 형성할 수 있다. 일례로, 상기 등받이센서(100)는 상기 틸팅축(35)이 관통하는 홀이 형성될 수 있다.Referring to FIG. 3, the
상기 등받이센서(100)는 상기 틸팅축(35)이 관통하는 중심으로부터 반경방향으로 소정의 길이만큼 연장되는 원판 형상으로 형성할 수 있다. The
상기 등받이센서(100)는 상면에 피씨비(PCB)패턴을 형성할 수 있다. 상기 피씨비패턴은 상기 등받이센서(100)의 원주 방향을 따라 연장될 수 있다. 일례로, 상기 피씨비패턴은 상기 등받이센서(100)의 중심을 기준으로 0도에서 180도까지 반원의 호를 그리도록 연장될 수 있다. The
그리고 상기 피씨비패턴의 하측으로 피씨비(PCB)가 구비될 수 있다. In addition, a PCB may be provided below the PCB pattern.
상기 피씨비와 상기 피씨비패턴은 후술할 타겟금속(150)의 이동에 따라 자기장 또는 전기장의 변화를 이용하여 타겟금속(150)의 위치를 검출할 수 있다. 즉, 상기 등받이센서(100)는 전자기 유도를 이용하여 회동(틸팅) 각도를 검출할 수 있다. The PCB and the PCB pattern may detect the position of the
상기 등받이센서(100)는 상기 틸팅축(35)에 결합되는 타겟금속(150)을 더 포함할 수 있다.The
상기 타겟금속(150)은 상기 등받이센서(100)로부터 소정의 간격(d)만큼 이격되도록 상기 틸팅축(35)에 결합할 수 있다. 일례로, 상기 소정의 간격(d)은 2mm로 설정될 수 있다.The
상기 타겟금속(150)은 상기 등받이센서(100)의 상면과 평행하도록 배치될 수 있다. 일례로, 상기 타겟금속(150)은 일 방향으로 길게 연장된 장변을 가지는 육면체 형상으로 형성할 수 있다.The
즉, 상기 타겟금속(150)은 상기 등받이센서(100)의 상면으로부터 상기 소정의 간격(d)만큼 상측으로 이격되어 위치할 수 있다. 그리고 상기 타겟금속(150)은 상기 틸팅축(35)과 결합되므로, 상기 틸팅축(35)이 상기 경사모터(38)의 작동에 의해 회전될 때 함께 회전할 수 있다.That is, the
따라서, 상기 타겟금속(150)은 상기 틸팅축(35)을 중심으로 상기 피씨비패턴의 상측에서 상기 피씨비패턴의 연장 방향(원주 방향)으로 회전할 수 있다.(도 3(b) 점선)Accordingly, the
그리고 상기 타겟금속(150)의 회전에 의해 유도 전기장 또는 유도 자기장의 변화가 발생할 수 있다. 즉, 상기 등받이센서(100)는 상기 유도 전기장 또는 유도 자기장의 변화를 통하여 상기 타겟금속(150)의 위치를 감지할 수 있다. 결국, 상기 등받이센서(100)는 상기 타겟금속(150)이 기준 위치로부터 회전한 각도를 감지할 수 있으므로, 상기 시트(30)의 회동 각도(또는 틸팅 각도)를 검출할 수 있다. In addition, a change in the induced electric field or the induced magnetic field may occur due to the rotation of the
상기 등받이센서(100), 상기 회전센서(500) 및 상기 롱슬라이드센서(200)의 감지(sensing) 원리는 타겟 금속(target metal)의 이동에 따른 전자기 유도의 변화를 이용한 것으로 동일하다. 따라서, 상기 회전센서(500)와 상기 롱슬라이드센서(200)의 감지 원리에 대한 설명은 상술한 등받이센서(100)의 감지 원리에 대한 설명을 원용할 수 있다.The sensing principle of the
도 4는 본 발명의 실시예에 따른 회전판 및 회전센서의 연결관계를 보여주는 도면이고, 도 5는 본 발명의 실시예에 따른 이동레일 및 롱슬라이드센서의 연결관계를 보여주는 도면이다. 4 is a view showing a connection relationship between a rotating plate and a rotation sensor according to an embodiment of the present invention, and FIG. 5 is a view showing a connection relationship between a moving rail and a long slide sensor according to an embodiment of the present invention.
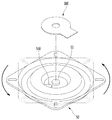
도 4를 참조하면, 상기 회전센서(500)는 상기 회전판(50)에 설치할 수 있다.Referring to FIG. 4, the
상기 회전판(50)의 중심에는 상기 회전판(50)의 회전 중심축인 회전축(55)이 구비될 수 있다. 상기 회전축(55)은 상기 회전판(55)의 고정부분으로 구비될 수 있다.At the center of the
즉. 상기 회전축(55)은 상기 회전판(55)의 회전에 독립적으로 고정된 위치를 유지할 수 있다. In other words. The rotating
또한, 상기 회전축(55)은 회전하지 않으므로 상기 회전판(50)의 고정부분의 일 구성으로도 이해할 수 있다. 일례로, 상기 회전축(55)은 상술한 상기 회전판(55)의 하부에 위치하는 상하 고정판과 결합할 수 있다.In addition, since the rotating
그리고 상기 회전축(55)은 상기 회전센서(500)의 중심에 삽입 및/또는 관통하도록 위치할 수 있다. 그리고 상기 회전센서(500)는 상기 회전축(55)에 결합할 수 있다. 따라서, 상기 회전센서(500)도 회전판(50)의 회전에 독립적으로 고정된 위치를 유지할 수 있다.Further, the
상기 회전판(50)은 상기 회전모터(55)에 연결되어 상기 회전축(55)을 중심으로 회전할 수 있다. 일례로, 상기 회전모터(55)는 상기 회전판(50)의 회전부분과 결합되어 상기 회전판(50)에 동력을 전달할 수 있다.The rotating
상기 회전센서(500)는 상기 회전판(50)의 중심부에 설치되는 회전타겟금속(550)을 포함할 수 있다.The
상기 회전타겟금속(550)은 상기 회전판(50)의 회전 부분에 결합할 수 있다. 일례로, 상기 회전타겟금속(550)은 상기 회전판(50)의 상면 중심부에 위치할 수 있다. 따라서, 상기 회전타겟금속(550)은 상기 회전판(50)의 회전에 종속되어 함께 회전할 수 있다. The
상기 회전타겟금속(550)은 일 방향으로 길게 연장되는 장변을 가지는 육면체 형상으로 형성할 수 있다. 일례로, 상기 회전타겟금속(550)은 상기 회전판(50)의 중심으로부터 반경 방향으로 연장되는 사각 형상으로 형성할 수 있다. The
상기 회전센서(500)는 상기 회전타겟금속(550)으로부터 소정의 간격(d)만큼 상방으로 이격되도록 상기 회전축(55)에 결합할 수 있다. 일례로, 상기 소정의 간격(d)은 2mm로 설정될 수 있다.The
상기 회전센서(550)의 하면에는 상술한 피씨비패턴(PCB Pattern)이 형성될 수 있다. 상기 피씨비패턴은 상기 회전센서(550)의 하면에 상기 회전축(55)을 중심으로 원주 방향으로 연장되도록 형성할 수 있다.The above-described PCB pattern may be formed on the lower surface of the
따라서, 상기 회전타겟금속(550)은 상기 피씨비패턴의 연장 방향에 대응되는 하측 위치에서 회전할 수 있다. Therefore, the
상기 회전판(50)의 회전에 따라 상기 회전타겟금속(550)은 함께 회전할 수 있다. 이때, 상기 회전축(55)에 설치된 회전센서(55)는 상기 회전타겟금속(550)의 이동에 따른 유도 전기장 또는 유도 자기장의 변화를 감지할 수 있다. 이에 의하면, 상기 회전센서(55)는 상기 회전판(50)의 회전에 따른 상기 회전타겟금속(550)의 위치를 감지할 수 있다. The
결국, 상기 회전센서(55)는 상기 회전판(50)이 기준 위치(또는 기준 지점)로부터 얼마만큼 회전된 위치에 있는지 회전 각도를 실시간으로 검출할 수 있다. 달리 표현하면, 상기 회전센서(55)는 상기 시트(30)의 회전 각도를 검출할 수 있다.As a result, the
한편 또 다른 실시 예로, 상기 회전센서(500)는 홀(hall) 센서로 구비될 수도 있다. Meanwhile, in another embodiment, the
다만, 상기 회전센서(500)가 홀센서로 구비되는 경우, 회전모터(55)의 작동시 자기장 변화를 감지하여 모터축의 회전에 따른 회전 각도와 그에 따른 위치를 탐색할 수 있다. 일례로, 상기 제어기(300)는 상기 회전모터(55)의 회전 각속도를 기초로 획득할 수 있는 출력 펄스(pulse)를 이용하여, 상기 시트(30)의 회전 거리를 산출할 수 있다.However, when the
또한, 상기 회전센서(500)가 홀센서로 구비되는 경우, 상기 시트(30)의 회전에 따른 위치와 상기 홀센서로부터 감지되는 정보를 미리 매칭하여 저장할 수 있다. 이 경우, 상기 시트(30)가 다시 회전되기 위해서 각 회전이 수행되는 경우마다 메모리에 회전 정보를 저장할 수 있다.In addition, when the
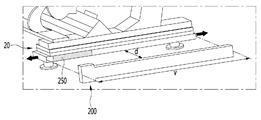
한편, 도 5를 참조하면, 상기 롱슬라이드센서(200)는 상기 이동레일(20)에 설치할 수 있다.Meanwhile, referring to FIG. 5, the
상기 롱슬라이드센서(200)는 상기 이동레일(20)의 일 측에 소정의 간격(d)만큼 외측으로 이격되도록 위치할 수 있다. 그리고 상기 롱슬라이드센서(200)의 전단부는 상기 이동레일(20)의 일 측단에 연결될 수 있다. 일례로, 상기 소정의 간격(d)은 2mm로 설정될 수 있다. The
상기 롱슬라이드센서(200)는 상기 이동레일(20)의 전후 방향 이동에 독립적으로 고정된 위치를 유지하도록 구비될 수 있다. 일례로, 상기 롱슬라이드센서(200)는 상기 이동레일(20)의 고정부분에 결합될 수 있다. The
상기 롱슬라이드센서(200)는 상기 이동레일(20)과 연결부분으로부터 상기 이동레일(20)의 연장 방향을 따라 길게 연장되는 연장부를 포함할 수 있다. 일례로, 상기 롱슬라이드센서(200)는 T형상으로 형성할 수 있다. 상기 연장부는 육면체 형상으로 형성할 수 있다. 그리고 상기 연장부는 상기 이동레일(20)의 외측으로 소정의 간격(d)만큼 이격되어 위치할 수 있다.The
즉, 상기 롱슬라이드센서(200)는 상기 이동레일(20)의 이동 방향인 전후 방향으로 연장되도록 형성할 수 있다. 그리고 상기 롱슬라이드센서(200)는 상기 이동레일(20)과 평행하도록 위치할 수 있다.That is, the
상기 롱슬라이드센서(200)는 상기 이동레일(20)의 길이와 대응되는 길이로 연장될 수 있다.The
한편, 상기 이동레일(20) 및 상기 롱슬라이드센서(200)의 전후 방향 길이는, 상기 시트(30)의 회전가능영역(v), 즉, 포지션 조건을 판단할 수 있는 일 기준이 될 수 있다. On the other hand, the length of the
일례로, 상기 롱슬라이드센서(200)는 후술할 레일타겟금속(250)의 위치를 감지하여 상기 이동레일(20)의 이동된 위치를 검출할 수 있다. 그리고 이를 기초로 상기 제어기(300)는 상기 이동레일(20)의 이동에 의한 상기 시트(30)의 착좌부의 현 위치를 계산 또는 판단할 수 있다. 이에 의하면, 상기 제어기(300)는 전후 이동에 의한 영향을 고려하여 상기 시트(30)가 회전가능영역(v)에 위치하는지 아닌지를 판단할 수 있다. For example, the
상기 롱슬라이드센서(200)는 상기 이동레일(20)을 바라보는 면에 피씨비패턴이 형성할 수 있다. 일례로, 상기 피씨비패턴은 상기 롱슬라이드센서(200)의 연장부에 형성할 수 있다. 그리고 상기 피씨비패턴은 상기 롱슬라이드센서(200)의 연장 방향을 따라 연장되도록 형성할 수 있다. The
즉, 상기 피씨비패턴은 상기 이동레일(20)의 외측으로 소정의 간격(d)만큼 이격된 위치에 상시 이동레일(20)과 평행하도록 형성할 수 있다. That is, the PCB pattern may be formed to be parallel to the moving
상기 롱슬라이드센서(200)는 상기 이동레일(20)에 결합되는 레일타겟금속(250)을 포함할 수 있다.The
상기 레일타겟금속(250)은 상기 이동레일(20)의 이동에 종속되도록 상기 이동레일(20)의 일 측면에 결합될 수 있다. 따라서, 상기 레일타겟금속(250)은 상기 이동레일(20)의 전후 방향 이동에 따라 함께 이동될 수 있다. 일례로, 상기 레일타겟금속(250)은 상기 이동레일(20)의 외측을 향하는 일 면에 결합할 수 있다. 그리고 상기 레일타겟금속(250)의 결합 위치는 상기 롱슬라이드센서(200)로부터 검출되는 이동 위치의 상대적인 기준이 될 수 있다. The
상기 레일타겟금속(250)은 상기 피씨비패턴과 소정의 간격(d)만큼 외측으로 이격되어 위치할 수 있다. 그리고 상기 레일타겟금속(250)과 상기 피씨비팬턴은 서로 마주보도록 평행하게 위치할 수 있다. The
따라서, 상기 레일타겟금속(250)이 전후 방향으로 이동하면, 위치가 고정된 상기 롱슬라이드센서(200)가 상기 레일타켓금속(250)의 이동에 따라 발생되는 유도 전기장 또는 유도 자기장의 변화를 감지할 수 있다.Therefore, when the
이에 의하면, 상기 롱슬라이드센서(200)는 상기 이동레일(20)의 기준 위치(또는 기준 지점)로부터 전방 또는 후방으로 이동된 위치를 감지할 수 있다. 결국, 상기 롱슬라이드센서(200)는 시트(20)의 전후 방향으로 이동 위치를 감지할 수 있다.According to this, the
이하에서는, 본 발명의 실시예에 따른 차량용 회전시트(1)의 회전 동작을 수행하기 위한 상세한 제어방법을 설명하도록 한다.Hereinafter, a detailed control method for performing a rotation operation of the
도 6은 본 발명의 실시예에 따른 차량용 회전시트의 회전을 위한 제어방법을 보여주는 플로우 차트이고, 도 7은 도 6의 초기조건확인(S10) 단계의 상세한 제어방법을 보여주는 플로우 차트이다.FIG. 6 is a flow chart showing a control method for rotating a vehicle rotating seat according to an embodiment of the present invention, and FIG. 7 is a flow chart showing a detailed control method of the initial condition confirmation (S10) step of FIG. 6.
도 6 및 도 7을 참조하면, 본 발명의 실시예에 따른 차량용 회전시트(1)의 제어방법은 시트(30)의 회전(rotation)을 수행하기 위해 초기조건을 확인하는 초기조건확인 단계(S10) 및 시트(30)가 회전하는 로테이션 단계(S20)를 포함할 수 있다.6 and 7, the control method of the
상세히, 사용자는 시트(30)의 회전을 위하여 상기 입력스위치(60)를 조작할 수 있다. 그리고 상기 입력스위치(60)는 입력 신호를 상기 제어기(300)로 전송할 수 있다. 이때, 상기 제어기(300)는 시트(30)의 안전한 회전을 수행하기 위하여 초기조건을 확인할 수 있다.(S10)In detail, the user can operate the
상기 초기조건확인을 위하여, 상기 제어기(300)는 상기 입력스위치(60)로부터 회전 조작을 위한 입력(입력스위치ON)을 감지할 수 있다.(S11)In order to confirm the initial condition, the
상기 제어기(300)는 상기 입력스위치(60)로부터 입력(ON)을 감지하면, 시트(30)의 회전을 수행하기 위한 차량조건이 만족되는지 판단할 수 있다.(S12)When the
여기서, 상기 차량조건은 차량정차조건, 기어파킹(P)조건, 도어오픈조건 및 차량진단조건을 포함할 수 있다. Here, the vehicle condition may include a vehicle stop condition, a gear parking (P) condition, a door open condition, and a vehicle diagnosis condition.
상세히, 상기 차량정차조건에서는 상기 차량의 속도가 0인 상태를 만족하는지 판단할 수 있다. 일례로, 상기 제어기(300)는 상기 속도감지센서로부터 상기 차량의 속도정보를 제공받아 정차상태인지 판단할 수 있다.In detail, in the vehicle stop condition, it may be determined whether the vehicle speed satisfies a zero state. For example, the
또한, 상기 기어파킹(P)조건에서는 상기 차량의 기어가 파킹(P) 상태인지를 판단할 수 있다. 일례로, 상기 제어기(300)는 상기 파킹감지센서로부터 차량의 기어정보를 제공받아 파킹(P)상태인지 판단할 수 있다.In addition, in the gear parking (P) condition, it may be determined whether the gear of the vehicle is in the parking (P) state. For example, the
또한, 상기 도어오픈조건에서는, 시트(30)의 회전시 간섭을 회피하기 위하여, 시트(30)에 근접 위치하는 차량의 도어가 오픈(open)상태인지 판단할 수 있다. 일례로, 상기 제어기(300)는 상기 도어감지센서로부터 상기 차량의 도어가 오픈(open) 상태인지 판단할 수 있다.Further, in the door open condition, in order to avoid interference when the
또한, 상기 차량진단조건에서는, 차량의 고장 정보 및 내역를 체크할 수 있다. 일례로, 상기 제어기(300)는 상기 진단장치(450)로부터 차량의 고장 정보를 수신 받아 상기 시트(30)의 회전 동작(‘로테이션 단계’)에 영향을 끼치는 내역이 있는지 판단할 수 있다. In addition, in the vehicle diagnosis condition, it is possible to check the failure information and details of the vehicle. For example, the
그리고 상기 제어기(300)는, 차량이 주행 중이거나, 기어가 파킹(P) 상태가 아니거나, 도어가 닫힌 상태 이거나, 상기 시트(30)의 회전 동작에 영향을 끼치는 차량의 고장 정보가 존재하는 것으로 판단한 경우에, 상기 출력부(400)로 관련 정보를 전송하여 외부로 출력시킬 수 있다.(S15)And the
따라서, 사용자는 상기 출력부(400)를 통해 시트(30)의 회전 가능 여부를 확인할 수 있다.Therefore, the user can check whether the
또한, 상기 제어기(300)는 상술한 차량조건을 만족한 경우에 상기 시트(30)에 사용자가 착좌한 상태인지 아닌지 판단할 수 있다.(S13)In addition, the
일례로, 상기 제어기(300)는 착좌센서로부터 입력되는 정보를 기초로 상기 시트(30)에 사용자가 앉아있는지 판단할 수 있다. In one example, the
사용자가 시트(30)에 착좌한 상태에서 회전 동작을 수행하면 안전 사고가 발생할 위험이 있기 때문에, 상기 제어기(300)는 상기 시트(30)에 사용자가 착좌한 상태로 판단된 경우 상기 출력부(400)로 관련 정보를 전송하여 외부로 안내 메시지를 출력시킬 수 있다.(S15)If the user performs a rotational operation while seated on the
또한, 상기 제어기(300)는 상기 승객 비착좌 조건(S13)을 만족한 경우에 상기 제어기(300)의 입력전원이 정상 상태인지 판단할 수 있다.(S14)In addition, the
상기 제어기(300)는 상기 파워모듈(80)로부터 필요한 전원을 공급받을 수 있다. 그리고 상기 시트(30)의 안정적인 회전을 위하여, 상기 제어기(300)로 공급되는 전원은 안정적으로 유지될 필요가 있다.The
따라서, 상기 제어기(300)는 입력되는 전원이 정상상태인지 판단할 수 있다. 일례로, 상기 제어기(300)는 입력전원이 12V를 유지하는지 판단할 수 있다.Therefore, the
그리고 상기 제어기(300)는 입력전원이 비정상상태로 판단된 경우, 상기 출력부(450)로 관련 정보를 전송하여 안내 메시지를 출력시킬 수 있다. In addition, when it is determined that the input power is abnormal, the
한편, 상기 S15 단계에 의하여 출력부(400)로 입력되는 정보는 상기 진단장치(450)로 전송되어 저장될 수 있다. Meanwhile, information input to the
상기 제어기(300)의 입력전원이 정상상태이면, 상기 제어기(300)는 초기조건이 만족된 것으로 판단하고 시트(30)의 회전동작을 수행하는 로테이션 단계(S20)로 진입할 수 있다. 즉, 상술한 초기조건이 모두 만족되면, 상기 시트(30)는 회전 동작을 수행할 수 있다.When the input power of the
상기 제어기(300)는 상기 시트(30)를 회전시키는 로테이션 단계를 수행할 수 있다.(S20)The
상기 로테이션 단계(S20)는 시트(30)의 회전 동작이 수행되는 단계로 이해할 수 있다. 상세히, 상기 로테이션 단계(S20)에서는 상기 시트(30)가 제 1 위치로부터 회전을 시작하여 제 2 위치에 도달한 후 회전을 종료하는 과정으로 이해할 수 있다. 일례로, 상기 제 1 위치는 상기 노멀포지션 또는 리버스포지션으로 규정할 수 있다. 상기 제 2 위치는 상기 제 1 위치로부터 180도 회전한 정반대 위치로 규정할 수 있다.The rotation step (S20) may be understood as a step in which the rotation operation of the
상기 로테이션 단계(S20)는 상기 시트(30)가 상기 노멀포지션에 위치하는 경우 시작될 수 있다. 물론, 상기 로테이션 단계(S20)는 상기 리버스포지션부터 시작되어 역순으로 상기 노멀포지션에서 정지하는 과정도 포함될 수 있다.The rotation step (S20) may be started when the
그리고 상기 초기조건확인 단계(S10)에서 초기조건이 만족된 경우 상기 제어기(300)는 상기 시트(30)가 상기 노멀포지션에 위치하는지 또는 상기 리버스포지션에 위치하는지 판단할 수 있다. 일례로, 상기 시트(30)가 상기 노멀포지션에 위치하는 경우, 회전 각도는 0도로 설정할 수 있다. 그리고 상기 시트(30)가 상기 리버스포지션에 위치하는 경우, 회전각도는 180도로 설정할 수 있다.In addition, when the initial condition is satisfied in the initial condition checking step S10, the
이하에서는 상기 시트(30)가 노멀포지션에 위치한 상태를 기준으로 상기 시트(30)의 전체적인 회전 동작에 대해 간략히 설명하도록 한다. Hereinafter, the overall rotational operation of the
상기 제어기(300)는 상기 시트(30)가 상기 노멀포지션에서 간섭 없이 회전을 수행할 수 있는지 회전가능 여부를 판단할 수 있다.(S21)The
그리고 회전이 가능한 경우, 상기 제어기(300)는 상기 회전모터(55)를 작동시켜 상기 시트(30)를 회전시킬 수 있다. 또한, 상기 시트(30)가 회전을 시작하는 동시에 상기 제어기(300)는 긴급 입력 여부를 감지할 수 있다.(S22)In addition, when rotation is possible, the
상기 시트(30)가 회전하는 경우, 상기 제어기(300)는 상기 시트(30)의 회전 각도를 실시간으로 확인할 수 있다. When the
여기서, 상기 긴급 입력은 사용자가 시트(30)의 회전을 중단시키기 위해 입력스위치(60)를 재차 조작하였거나, 회전 도중 물체나 손이 끼이는 등의 문제가 발생한 경우 발생되는 신호로 이해할 수 있다.Here, the urgent input can be understood as a signal generated when the user operates the
상기 제어기(300)는 상기 긴급 입력을 감지하면 상기 회전모터(55)의 작동을 긴급히 정지시킬 수 있다. The
한편, 상기 시트(30)의 회전이 중단된 후, 사용자는 이상 유무를 확인하고 다시 회전을 이어가고자 한다면 상기 입력스위치(60)를 다시 조작할 수 있다. On the other hand, after the rotation of the
즉, 상기 입력스위치(60)는 상기 시트(30)가 노멀포지션 또는 리버스포지션 상태일 때, 상기 시트(30)의 회전을 위한 스타트 스위치로 기능을 수행하고, 상기 시트(30)가 회전 중인 경우에는 긴급 상황을 대처하기 위한 긴급스위치로 기능을 수행하며, 상기 긴급 스위치가 작동된 상태에서는, 중단된 회전을 이어서 수행하기 위한 재개(resume)스위치로 기능을 수행할 수 있다. That is, the
상기 제어기(300)는 회전 각도가 180도에 도달하면 회전모터(55)를 정지시켜 상기 시트(30)의 회전을 정지시킬 수 있다. 즉, 상기 제어기(300)는 상기 회전 각도가 180도에 도달한 것으로 판단되면 회전을 완료할 수 있다. 이때, 상기 시트(30)는 상기 리버스포지션에 위치할 수 있다.(S23)When the rotation angle reaches 180 degrees, the
이하에서는 상기 로테이션 단계(S20)에 대한 상세한 제어방법을 설명하도록 한다.Hereinafter, a detailed control method for the rotation step (S20) will be described.
도 8은 도 6의 로테이션 단계(S20)의 상세한 제어방법을 보여주는 플로우 차트이다. FIG. 8 is a flow chart showing a detailed control method of the rotation step S20 of FIG. 6.
도 8을 참조하면, 상기 제어기(300)는 상기 시트(30)가 회전가능포지션에 해당하는지 판단할 수 있다.(S100)Referring to FIG. 8, the
상기 회전가능포지션은 상기 시트(30)가 차량 내부의 다른 구성에 간섭 받지 않고 안정적으로 회전할 수 있는 포지션으로 이해할 수 있다.The rotatable position can be understood as a position in which the
상기 시트(30)가 회전가능포지션에 위치하면, 상기 제어기(300)는 구동부에 전원(power)이 연결되도록 제어할 수 있다.(S180)When the
즉, 상기 구동부는 파워 온(ON) 상태로 제어될 수 있다. 일례로, 상기 제어기(300)는 상기 회전모터(55)의 작동을 위하여 상기 회전모터(55)로 전원이 연결되도록 제어할 수 있다. That is, the driving unit may be controlled in a power-on state. For example, the
그리고 상기 제어기(300)는 제어기 안전모드를 실행할 수 있다.(S200) In addition, the
상기 제어기 안전모드는 상기 제어기(300)로부터 전기적으로 연결되는 구동부의 과전류를 감지함으로써 상기 구동부가 안전하게 작동되도록 할 수 있다. The controller safety mode may enable the driving unit to operate safely by detecting an overcurrent of the driving unit electrically connected from the
일례로, 상기 제어기 안전모드에서는, 상기 회전모터(55)의 스톨(stall) 조건 판단, 과전류 발생 여부 판단 및 상기 회전센서(500)로부터 감지된 회전 속도 변화율을 감지함으로써 비정상 작동 여부를 판단할 수 있다. For example, in the controller safety mode, it is possible to determine whether an abnormal operation is performed by determining a stall condition of the
상기 회전가능포지션 판단 단계(S100) 및 상기 제어기 안전모드 실행 단계(S200)에 대한 상세한 제어방법은 후술하도록 한다.Detailed control methods for the rotatable position determination step (S100) and the controller safe mode execution step (S200) will be described later.
상기 제어기 안전모드가 실행되면, 상기 제어기(300)는 상기 회전판(50)의 구속상태를 해제하기 위하여 락킹엑츄에이터(70)를 제어하고 상기 회전판(50)을 상승시킬 수 있다.(S300)When the controller safety mode is executed, the
일례로, 상기 제어기(300)는 상기 락킹엑츄에이터(70)를 오프(OFF)상태로 제어함으로써, 상기 회전판(50)의 구속은 해제될 수 있다. 이때, 상기 회전판(50)은 상승(lift)되어 회전 가능한 상태로 준비될 수 있다.In one example, the
그리고 상기 제어기(300)는 상기 회전모터(55)를 작동시킬 수 있다,(S350)And the
상기 회전모터(55)가 작동되면, 상기 회전모터(55)에 결합된 회전판(50)이 회전할 수 있다. 일례로, 상기 제어기(300)는 상기 회전모터(55)의 출력을 제어함으로써 상기 시트(30)의 회전 속도를 제어할 수 있다. When the
상기 회전모터(55)의 작동이 시작되면, 상기 제어기(300)는 상기 회전센서(500)를 통하여 상기 회전판(50)의 회전 위치(일례로, 회전 각도)를 감지할 수 있다. 그리고 상기 제어기(300)는 감지되는 회전판(50)의 위치에 따라 회전모터(55)의 출력이 가변되도록 제어할 수 있다.When the operation of the
그리고 상기 제어기(300)는 상기 회전모터(55)가 작동을 시작하는 소정의 구간(후술할 ‘댐핑스타트구간’)과 상기 회전모터(55)가 작동을 종료하는 소정의 구간(후술할 ‘댐핑스톱구간’)에서 상기 시트(30)가 부드럽게 가속되고 부드럽게 정지되도록 하는 댐핑제어를 수행할 수 있다.(S400)In addition, the
상기 댐핑제어는, 상기 회전모터(55)의 작동이 시작되는 댐핑스타트구간과 상기 회전모터(55)의 작동이 정지되는 댐핑스톱구간에서 수행될 수 있다.The damping control may be performed in a damping start section in which the operation of the
상기 댐핑제어에 의하면, 상기 댐핑스타트구간에서는 상기 시트(30)가 안정적으로 회전을 시작하도록 가속이 천천히 부드럽게(smooth) 시작되며, 최종 회전 속도에 도달 직전 가속기울기를 작게 함으로써 시트(30)의 회전에 이질감이 없고 사용자의 감성적인 만족을 통한 고급감이 실현될 수 있도록 제어할 수 있다.According to the damping control, in the damping start section, the acceleration starts slowly and smoothly so that the
또한, 상기 댐핑스톱구간에서는, 상기 시트(30)가 안정적으로 회전을 정지할 수 있도록 감속이 천천히 부드럽게 시작되며, 최종적으로 상기 시트(30)의 정지되기 직전 가속기울기를 작게 함으로써 시트(30)의 회전 정지에 이질감이 없고 사용자의 감성적인 만족을 통한 고급감이 실현될 수 있도록 제어할 수 있다.In addition, in the damping stop section, the deceleration starts slowly and smoothly so that the
상기 댐핑제어는, 상기 회전모터(55)의 회전속도가 상승하는 상기 댐핑스타트구간과 상기 회전속도가 하강하는 상기 댐핑스톱구간에서 상기 회전속도의 가속기울기를 시간에 따라 가변하도록 수행될 수 있다. 따라서, 상기 회전모터(55)의 회전속도는, 종래(linear)보다 S-커브(S-curve)를 그리면서 상승 또는 하강할 수 있다. 이와 관련된 상세한 설명은 도 11 및 도 12의 설명에서 후술하도록 한다.The damping control may be performed to vary the acceleration slope of the rotational speed over time in the damping start section in which the rotational speed of the
또한, 상기 제어기(300)는 상기 회전센서(500)로부터 상기 회전판(50)의 회전 위치(또는 회전 각도)를 감지하여 최종적으로 회전이 완료된 상태인지 판단할 수 있다.(S450) In addition, the
그리고 상기 회전판(50)의 회전이 완료되면, 상기 제어기(300)는 상기 회전모터(55)의 작동을 오프(OFF)시킬 수 있다.(S480)And when the rotation of the
상기 회전모터(55)가 오프되면, 상기 제어기(300)는 상기 회전판(50)을 하강시키고 상기 회전판(50)의 회전을 다시 구속하도록 락킹엑츄에이터(70)를 제어할 수 있다.(S500)When the
일례로, 상기 제어기(300)는 상기 락킹엑츄에이터(70)를 온(ON) 상태로 제어함으로써 상기 회전판(50)을 구속시킬 수 있다.In one example, the
상술한 로테이션 단계에 의하면, 상기 노멀포지션의 시트(30)는 상기 리버스포지션으로 자동적으로 안전하게 회전할 수 있다. 또한, 상기 리버스포지션의 시트(30)도 다시 상기 노멀포지션으로 자동적으로 안전하게 회전할 수 있다.According to the rotation step described above, the
한편, 상기 시트(30)를 다시 회전 전의 위치(노멀포지션 또는 리버스포지션)로 복귀 시키고자 하는 경우, 사용자는 상기 입력스위치(60)를 조작(예를들어, 터치)할 수 있다. 그러면 상술한 초기조건확인 단계(S10) 및 로테이션 단계(S20)가 반복되면서 상기 시트(30)를 원 위치로 복귀시킬 수 있다. 이 경우, 상기 회전모터(55)에 의한 시트(30)의 회전 방향은 반대로 전환될 수 있다.On the other hand, in order to return the
도 9는 도 8의 회전가능포지션 판단(S100) 단계의 상세한 제어방법을 보여주는 플로우 차트이다.9 is a flow chart showing a detailed control method of the rotatable position determination (S100) of FIG.
도 9를 참조하면, 상기 시트(30)가 회전가능포지션에 해당하는지 판단하기 위해, 상기 제어기(300)는 등받이센서(100)로부터 현재 시트(30)의 회동 각도를 감지 및/또는 검출할 수 있다.(S110) Referring to FIG. 9, in order to determine whether the
상기 등받이센서(100)는 현재 시트(30)의 등받이부가 회동을 위한 기준 위치로부터 얼마만큼 회동한 위치인지 회동 각도를 검출하여, 상기 제어기(300)로 전송할 수 있다. 즉, 상기 제어부(300)는 상기 시트(30)의 현 각도를 감지할 수 잇다. The
또한, 상기 제어기(300)는 롱슬라이드센서(200)로부터 현재 시트(30)의 전후 이동 위치를 감지 및/또는 검출할 수 있다.(S120)In addition, the
상기 롱슬라이드센서(200)는 현재 시트(30)의 착좌부가 전후 이동을 위한 기준 위치로부터 얼마만큼 이동한 위치인지 이동 위치를 검출하여, 상기 제어기(300)로 전송할 수 있다. 즉, 상기 제어부(300)는 상기 시트(30)의 현 위치를 감지할 수 있다.The
그리고 상기 제어기(300)는 상기 등받이센서(100)로부터 전달받은 현 각도 및 상기 롱슬라이드센서(200)로부터 전달받은 현 위치 정보를 기초로, 상기 시트(30)가 간섭 없이 회전을 수행할 수 있는 상술한 포지션 조건을 만족하는지 판단할 수 있다.(S130)And the
상세히, 상기 제어기(300)는 상기 현 각도가 상기 포지션 조건의 회동각도 범위를 만족하는지 판단할 수 있다. 여기서, 상기 회동각도 범위는 상기 시트(30)의 등받이부가 간섭 없이 회전할 수 있는 각도의 범위로 미리 설정될 수 있다. 상기 미리 설정된 회동각도 범위는 차량 제조시 공간 규격에 따라 설정될 수 있다.In detail, the
또한, 상기 제어기(300)는 상기 현 위치가 상기 포지션 조건의 전후 이동위치 범위를 만족하는지 판단할 수 있다. 여기서, 상기 전후 이동위치 범위는 상기 시트(30)의 착좌부가 간섭 없이 회전할 수 있는 전후 방향의 최대 거리로 미리 설정될 수 있다. 상기 미리 설정된 전후 이동위치 범위는 차량 제조시 공간 규격에 따라 설정될 수 있다.In addition, the
상기 전후 이동위치 범위는, 상술한 바와 같이, 상기 이동레일(20) 및 상기 롱슬라이드센서(200)의 길이를 기준으로 설정된 회전가능영역(v)으로 이해할 수 있다.As described above, the range of the front-rear moving position can be understood as the rotatable area v set based on the lengths of the moving
상기 현 각도 및 상기 현 위치가 상기 포지션 조건에 만족되면, 상기 제어기(300)는 상기 시트(30)가 간섭 없이 자동적으로 회전될 수 있는 위치를 만족한 것으로 판단할 수 있다.When the current angle and the current position are satisfied with the position condition, the
반면에, 상기 현 각도 및 상기 현 위치가 상기 포지션 조건을 만족하지 못하는 경우, 상기 제어기(300)는 구동부를 제어함으로써 상기 포지션 조건에 만족하도록 상기 시트(30)를 이동시킬 수 있다. On the other hand, if the current angle and the current position do not satisfy the position condition, the
상세히, 상기 제어기(300)는 상기 시트(30)가 상기 포지션 조건 중 회동각도 범위를 만족하지 못하는 경우에 상기 경사모터(38)를 제어함으로써, 상기 시트(30)의 회동각도가 상기 회동각도 범위를 만족하도록 상기 시트(30)의 등받이부를 회동시킬 수 잇다. In detail, the
또한, 상기 제어기(300)는 상기 시트(30)가 상기 포지션 조건 중 전후 이동위치 범위를 만족하지 못하는 경우에 상기 전후모터(28)를 제어함으로써, 상기 시트(30)의 전후 이동 거리가 상기 전후 이동위치 범위에 만족하도록 상기 시트(30)의 착좌부를 이동시킬 수 있다.In addition, the
따라서, 상기 시트(30)는 간섭 없이 회전할 수 있는 포지션 조건을 만족한 상태에서 상기 회전모터(55)의 작동에 의한 회전이 수행될 수 있다.Therefore, the
도 10은 도 8의 제어기 안전모드 실행(S200) 단계의 상세한 제어방법을 보여주는 플로우 차트이다.FIG. 10 is a flow chart showing a detailed control method of the controller safety mode execution (S200) of FIG. 8.
도 10을 참조하면, 상기 제어기 안전모드가 실행되는 경우, 상기 제어기(300)의 내부 회로에 흐르는 전류가 안전조건을 만족하는지 판단할 수 있다.(S210)Referring to FIG. 10, when the controller safety mode is executed, it may be determined whether the current flowing through the internal circuit of the
즉, 상기 제어기(300)는 입력되는 전류를 실시간으로 감지하여 과전류 여부를 판단할 수 있다. 일례로, 과전류 여부의 판단기준은 15(A)로 설정될 수 있다.That is, the
상기 제어기(300)의 입력 전류가 안전조건을 만족하면, 상기 제어기(300)는 상기 시트(30)의 회전속도 변화율이 안전조건을 만족하는지 판단할 수 있다.(S220)When the input current of the
상기 제어기(300)는 상기 시트(30)의 회전속도 및 회전속도 변화율을 상기 회전센서(55)에 의한 회전 정보를 기초로 연산 및/또는 검출할 수 있다. 일례로, 상기 시트(30)의 회전속도의 변화율이 미리 설정된 기준 변화율 보다 큰 경우, 즉, 상기 회전속도가 기준 보다 빠르게 증가되거나 감소되는 경우 상기 제어기(300)는 상기 시트(30)의 회전속도 변화율이 안전조건을 만족하지 못하는 것으로 판단할 수 있다.The
한편, S210 단계 또는 S220 단계를 만족하지 못하는 경우, 상기 제어기(300)는 회전모터(55)의 작동을 소정의 시간 동안 정지시킨 후 재차 기동하도록 제어할 수 있다.(S225) On the other hand, if the step S210 or step S220 is not satisfied, the
그리고 상기 제어기(300)는 상기 재차 기동한 이유와 내역에 대한 정보를 상기 진단장치(450)에 전송할 수 있다. In addition, the
또한, 상기 S210 단계 및 S220 단계가 만족되는 경우라도, 상기 제어기(300)는 상기 회전모터(55)의 스톨(stall) 조건을 감지할 수 있다.(S230)In addition, even if the steps S210 and S220 are satisfied, the
상기 회전모터(55)는 영구 자석이 사용되는 경우 이에 다른 스톨(stall)조건이 설정될 수 있다. 일례로, 상기 회전모터(55)의 스톨 조건은, 상기 회전모터(55)의 입력 전류 값이 15(A) 보다 큰 경우로 설정될 수 있다.When the permanent magnet is used, the
상기 제어기(300)는 상기 회전모터(55)가 스톨조건을 만족하면, 과전류가 발생되므로 즉각적으로 회전모터(55)의 작동을 정지시킬 수 있다.(S250)When the
그리고 상기 제어기(300)는 상기 스톨조건에 의한 회전모터(55)의 정지 정보를 상기 진단장치(450)에 전송하고, 상기 출력부(400)에 의해 외부로 출력되도록 제어할 수 있다.(S260)In addition, the
한편, 상기 제어기(300)는 상기 회전모터(55)의 작동 시간 동안 상술한 스톨 조건이 감지되지 않는다면 최종적으로 시트(30)의 회전이 완료되어 상기 제어기 안전모드를 종료시킬 수 있다.(S240) On the other hand, if the above-described stall condition is not sensed during the operation time of the
도 11은 본 발명의 실시예에 따른 댐핑(damping)제어를 보여주는 타이밍(timing) 차트이고, 도 12는 도 11의 댐핑스타트구간(A)에서 시간 대비 모터 스피드(speed)를 비교해주는 그래프이다.11 is a timing chart showing damping control according to an embodiment of the present invention, and FIG. 12 is a graph comparing motor speed over time in the damping start section A of FIG. 11.
도 11을 참조하면, 상술한 바와 같이, 상기 댐핑제어는, 상기 회전모터(55)의 작동이 시작되는 댐핑스타트구간(A)과 상기 회전모터(55)의 작동이 정지되는 댐핑스톱구간(Z)에서 수행될 수 있다. Referring to FIG. 11, as described above, the damping control includes a damping start section (A) in which the operation of the
상기 댐핑스타트구간(A)은 상기 회전모터(55)의 출력이 0V에서 미리 설정된 최대출력(예를들어, 12V)까지 올라가는 상승 구간으로 규정할 수 있다. The damping start section A may be defined as a rising section in which the output of the
그리고 상기 댐핑스톱구간(Z)은 상기 회전모터(55)의 출력이 미리 설정된 최대출력(예를들어, 12V)으로부터 0V까지 떨어지는 하강 구간으로 규정할 수 있다. In addition, the damping stop section Z may be defined as a falling section in which the output of the
상기 댐핑스타트구간(A) 및 상기 댐핑스톱구간(Z)은, 상기 시트(30)가 정지 상태에서 회전이 시작되거나, 회전 상태에서 정지되는 구간으로 이해할 수 있다. 따라서, 상기 댐핑스타트구간(A) 및 상기 댐핑스톱구간(Z)에서의 회전모터(55) 제어는 상기 시트(30)의 회전에 대해 사용자의 감성적인 만족을 충족시킬 수 있도록 이루어져야 한다. The damping start section (A) and the damping stop section (Z) may be understood as a section in which the
상기 제어기(300)는 상기 회전모터(55)의 출력을 펄스 폭 변조(pulse width modulation)제어로 수행할 수 있다. 상기 펄스 폭 변조 제어는, 이하에서 PWM제어라고 이름한다.The
상세히, 상기 제어기(300)는 댐핑스타트구간(A)과 상기 댐핑스톱구간(Z)에서 듀티비(duty ratio)를 가변하도록 상기 PWM제어를 수행할 수 있다. 일례로, 상기 제어기(300)는 상기 댐핑스타트구간(A)에서 듀티비(duty ratio)가 시간의 경과에 따라 점차 커지도록 PWM제어를 수행할 수 있다. 그리고 상기 제어기(300)는 상기 댐핑스톱구간(Z)에서 듀티비(duty ratio)가 시간의 경과에 따라 점차 작아지도록 PWM제어를 수행할 수 있다.In detail, the
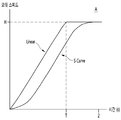
이에 의하면, 도 12를 참조하면, 상기 댐핑스타트구간(A)에서는 상기 회전모터(55)의 회전속도(‘모터스피드’)가 0에서부터 시간의 경과에 따라 서서히 상승될 수 있다. According to this, referring to FIG. 12, in the damping start section A, the rotational speed (“motor speed”) of the
즉, 상기 댐핑제어가 없이 기동되는 종래 회전모터의 경우에는, 회전속도(Linear)가 일정한 가속도로 상승하면서 상기 미리 설정된 최대출력에 대응되는 회전속도(H)까지 소정의 시간(T)에 도달할 수 있다.That is, in the case of a conventional rotary motor that is started without the damping control, the rotational speed (Linear) rises at a constant acceleration and reaches a predetermined time (T) up to the rotational speed (H) corresponding to the preset maximum output. Can.
상기 댐핑제어가 적용되는 회전모터(55)는 상기 미리 설정된 최대출력에 대응되는 회전속도(H)에 도달하기까지 가속도가 시간에 따라 가변하도록 제어될 수 있다. 일례로, 상기 제어기(300)는 상기 회전모터(55)의 작동이 부드럽게 시작될 수 있도록 가속도를 상대적으로 아주 작은 값에서부터 점진적 증가시킬 수 있다. 그리고 상기 제어기(300)는 상기 회전모터(55)의 최대출력에 대응되는 회전속도(H)에 부드럽게 도달시키기 위하여, 가속도를 점진적으로 감소시킬 수 있다. The
달리 표현하면, 상기 댐핑제어에서, 상기 제어기(300)는 상기 회전모터(55)의 회전속도가 상승하는 상기 댐핑스타트구간(A)과 상기 회전속도가 하강하는 상기 댐핑스톱구간(Z)에서 상기 회전모터(55)의 회전속도 기울기를 시간에 따라 가변되도록 제어할 수 있다.In other words, in the damping control, the
따라서, 상기 회전모터(55)의 회전속도는, 종래(linear)보다 S-커브(S-curve)를 그리면서 상승 또는 하강할 수 있다. Therefore, the rotational speed of the
일례로, 도 12와 같이, 상기 댐핑제어가 적용되는 회전모터(55)의 회전속도는 상기 미리 설정된 최대출력에 대응되는 속도(H)까지 ‘S’ 형상의 커브 그래프가 형성되도록 제공될 수 있다. As an example, as shown in FIG. 12, the rotational speed of the
한편, 상기 회전모터(55)의 회전속도(S-curve)는, 미리 설정된 최대출력에 대응되는 속도(H)까지 도달하는 시간이 종래의 회전모터의 경우(T) 보다 길어질 수 있다. On the other hand, the rotational speed (S-curve) of the
따라서, 상기 댐핑스타트구간(A)에서는 상기 시트(30)가 회전을 천천히 부드럽게(smooth) 시작할 수 있으며, 결국, 상기 시트(30)의 급작스러운 회전에 의해 발생되는 이질감을 최소화시키고 사용자의 감성적인 만족을 통한 고급감이 실현시킬 수 있다.Therefore, in the damping start section (A), the
마찬가지로, 상기 댐핑스톱구간(Z)에서는, 상기 시트(30)가 안정적으로 회전을 정지할 수 있도록 감속이 천천히 시작되며, 최종적으로 상기 시트(30)의 정지되기까지 회전속도가 천천히 감소됨으로써, 상기 시트(30)의 급작스러운 정지에 의해 발생되는 이질감을 최소화시키고 사용자의 감성적인 만족을 통한 고급감을 실현시킬 수 있다.Similarly, in the damping stop section Z, deceleration starts slowly so that the
1 : 차량용 회전시트 20 : 이동레일
30 : 시트 50 : 회전판
100: 등받이센서 200: 롱슬라이드센서
500: 회전센서1: Vehicle rotating seat 20: Moving rail
30: sheet 50: rotating plate
100: back sensor 200: long slide sensor
500: rotation sensor
Claims (20)
상기 틸팅축에 설치되어 상기 시트의 틸팅각도를 감지할 수 있는 등받이센서;
상기 이동레일에 설치되어 상기 시트의 전후 이동위치를 감지할 수 있는 롱슬라이드센서;
상기 회전판에 설치되어 상기 시트의 회전각도를 감지할 수 있는 회전센서; 및
상기 시트의 회전 동작을 제어하는 제어기를 포함하며,
상기 제어기는,
상기 등받이센서 및 상기 롱슬라이드센서로부터 감지되는 정보를 기초로 상기 시트가 회전가능포지션에 위치하는지 판단하고,
상기 회전가능포지션에 상기 시트가 위치하는 경우, 상기 회전판이 회전되도록 제어하는 것을 특징으로 하는 차량용 회전시트.
In the vehicle rotating seat comprising a seat for a user to sit, a tilting axis for tilting the seat, a moving rail for moving the seat in the front-rear direction, and a rotating plate for rotating the seat,
A backrest sensor installed on the tilting shaft to detect a tilting angle of the seat;
A long slide sensor installed on the moving rail to detect a front and rear moving position of the seat;
A rotation sensor installed on the rotating plate to detect a rotation angle of the sheet; And
It includes a controller for controlling the rotational motion of the seat,
The controller,
Based on information detected from the backrest sensor and the long slide sensor, it is determined whether the seat is located in a rotatable position,
When the seat is located in the rotatable position, the rotating sheet for a vehicle, characterized in that the rotating plate is controlled to rotate.
상기 등받이센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 틸팅축에 결합되는 타겟금속을 더 포함하며,
상기 등받이센서는 상기 틸팅축과 함께 회전하는 상기 타겟금속에 의하여 상기 시트의 틸팅각도를 감지하는 것을 특징으로 하는 차량용 회전시트.
According to claim 1,
Further comprising a target metal coupled to the tilting shaft to be spaced a predetermined distance (d) from the backrest sensor,
The backrest sensor is a vehicle rotating seat, characterized in that for detecting the tilting angle of the seat by the target metal rotating with the tilting shaft.
상기 롱슬라이드센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 이동레일에 결합되는 레일타켓금속을 더 포함하며,
상기 롱슬라이드센서는 상기 이동레일과 함께 전후로 이동하는 상기 레일타겟금속에 의하여 상기 시트의 전후 이동위치를 감지하는 것을 특징으로 하는 차량용 회전시트.
According to claim 1,
Further comprising a rail target metal coupled to the moving rail to be spaced a predetermined distance (d) from the long slide sensor,
The long slide sensor is a vehicle rotating seat, characterized in that for detecting the front and rear moving position of the seat by the rail target metal moving back and forth with the moving rail.
상기 회전판의 중심에 구비되며, 상기 회전판의 회전에 독립적으로 고정된 위치를 유지하는 회전축; 및
상기 회전센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 회전판에 결합되는 회전타겟금속을 더 포함하며,
상기 회전센서는 상기 회전축에 결합되며, 상기 회전판과 함께 회전하는 상기 회전타겟금속에 의하여 상기 시트의 회전각도를 감지하는 것을 특징으로 하는 차량용 회전시트.
According to claim 1,
A rotating shaft provided at the center of the rotating plate and maintaining a fixed position independent of rotation of the rotating plate; And
Further comprising a rotation target metal coupled to the rotating plate to be spaced a predetermined distance (d) from the rotating sensor,
The rotating sensor is coupled to the rotating shaft, the rotating sheet for a vehicle, characterized in that for detecting the rotation angle of the seat by the rotating target metal rotating with the rotating plate.
상기 회전판에 연결되어 상기 회전판이 회전하도록 구동력을 제공하는 회전모터를 더 포함하며,
상기 제어기는,
상기 회전모터의 출력이 상승 또는 하강하는 구간에서 가속도가 가변되도록 제어하는 것을 특징으로 하는 차량용 회전시트.
According to claim 1,
Further comprising a rotary motor connected to the rotating plate to provide a driving force to rotate the rotating plate,
The controller,
A rotating seat for a vehicle, characterized in that the output of the rotating motor is controlled such that the acceleration is variable in a section in which it rises or falls.
상기 회전모터는 브러시리스(BLDC)모터를 포함하는 차량용 회전시트.
The method of claim 5,
The rotating motor is a vehicle rotating seat comprising a brushless (BLDC) motor.
상기 제어기는,
상기 회전센서로부터 감지되는 회전각도를 기초로 상기 회전모터의 출력을 제어하는 것을 특징으로 하는 차량용 회전시트.
The method of claim 5,
The controller,
The rotation sheet for a vehicle, characterized in that for controlling the output of the rotation motor based on the rotation angle detected by the rotation sensor.
상기 제어기는,
상기 시트가 상기 회전가능포지션을 벗어난 경우, 상기 시트를 상기 회전가능포지션으로 이동시키기 위해 상기 이동레일에 설치되는 전후모터 및 상기 틸팅축에 설치되는 경사모터를 제어하는 것을 특징으로 하는 차량용 회전시트.
According to claim 1,
The controller,
When the seat is out of the rotatable position, the vehicle rotating seat, characterized in that for controlling the front and rear motors installed on the moving rail and the inclined motor installed on the tilting shaft to move the seat to the rotatable position.
차량에 설치되는 다수의 센서로부터 감지된 정보를 기초로 차량의 상태를 관리하기 위한 진단장치를 더 포함하며,
상기 다수의 센서는, 도어감지센서, 파킹감지센서 및 속도감지센서 중 적어도 어느 하나를 포함하는 차량용 회전시트.
According to claim 1,
Further comprising a diagnostic device for managing the condition of the vehicle based on the information detected from a plurality of sensors installed in the vehicle,
The plurality of sensors, a vehicle rotating seat including at least one of a door detection sensor, a parking detection sensor and a speed detection sensor.
상기 제어기는, 상기 진단장치와 정보를 송수신 할 수 있는 통신모듈을 포함하는 차량용 회전시트.
The method of claim 9,
The controller, the vehicle rotating seat comprising a communication module capable of transmitting and receiving information with the diagnostic device.
상기 시트의 틸팅각도를 감지하는 등받이센서와 상기 시트의 전후 이동위치를 감지하는 롱슬라이드센서에 의해 감지된 정보를 기초로 상기 시트가 회전가능포지션에 위치하는지 판단하는 단계;
상기 시트의 회전을 제어하는 제어기의 상태를 감지하는 제어기 안전모드 실행단계;
상기 시트에 구비되는 회전판의 구속이 해제되는 단계;
상기 회전판에 연결된 회전모터가 작동되는 단계;
상기 회전모터의 작동에 따른 상기 시트의 회전 각도에 따라, 상기 회전모터의 출력을 펄스 폭 변조(PWM)로 제어하는 댐핑제어가 수행되는 단계; 및
상기 시트의 회전완료 여부를 판단하고, 상기 회전판을 다시 구속시키는 단계를 포함하는 차량용 회전시트의 제어방법.
Checking initial conditions for rotating the seat installed inside the vehicle;
Determining whether the seat is positioned in a rotatable position based on information detected by a backrest sensor that senses the tilting angle of the seat and a long slide sensor that detects a front and rear movement position of the seat;
A controller safety mode execution step of sensing a state of a controller that controls rotation of the seat;
The step of releasing the restraint of the rotating plate provided on the sheet;
Operating a rotating motor connected to the rotating plate;
Damping control is performed to control the output of the rotating motor by pulse width modulation (PWM) according to the rotation angle of the sheet according to the operation of the rotating motor; And
And determining whether the seat is completely rotated, and restraining the rotating plate again.
상기 댐핑제어는,
상기 회전모터의 출력이 0V로부터 미리 설정된 최대출력까지 상승하는 댐핑스타트구간 및
상기 회전모터의 출력이 상기 미리 설정된 최대출력으로부터 OV까지 하강하는 댐핑스톱구간에서 수행되는 것을 특징으로 하는 차량용 회전시트의 제어방법.
The method of claim 11,
The damping control,
Damping start section where the output of the rotating motor rises from 0V to a preset maximum output, and
Control method of a rotating seat for a vehicle, characterized in that the output of the rotating motor is performed in a damping stop section descending from the preset maximum output to OV.
상기 제어기는,
상기 댐핑스타트구간 및 상기 댐핑스톱구간에서 듀티비(duty ratio)를 가변하도록 상기 펄스 폭 변조(PWM)제어를 수행하는 것을 특징으로 하는 차량용 회전시트의 제어방법.
The method of claim 12,
The controller,
And controlling the pulse width modulation (PWM) to vary a duty ratio in the damping start section and the damping stop section.
상기 제어기는,
상기 댐핑스타트구간에서 상기 듀티비가 시간의 경과에 따라 점차 커지도록 제어하고,
상기 댐핑스톱구간에서 상기 듀티비가 시간의 경과에 따라 점차 작아지도록 제어하는 것을 특징으로 하는 차량용 회전시트의 제어방법.
The method of claim 13,
The controller,
In the damping start section, the duty ratio is controlled to gradually increase over time,
In the damping stop section, the control method for a rotating seat for a vehicle, characterized in that the duty ratio is controlled to gradually decrease over time.
상기 제어기는,
상기 댐핑스타트구간 및 상기 댐핑스톱구간에서 상기 회전모터의 회전 가속도를 가변시키는 것을 특징으로 하는 차량용 회전시트의 제어방법.
The method of claim 12,
The controller,
Control method of a rotating seat for a vehicle, characterized in that the rotational acceleration of the rotating motor is varied in the damping start section and the damping stop section.
상기 회전가능포지션에 위치하는지 판단하는 단계는,
상기 등받이센서로부터 상기 시트의 현 틸팅각도를 감지하는 단계;
상기 롱슬라이드센서로부터 상기 시트의 현 이동위치를 감지하는 단계; 및
상기 제어기가 상기 현 틸팅각도 및 상기 현 이동위치가 미리 설정된 범위를 만족하는지 판단하는 단계를 포함하는 차량용 회전시트의 제어방법.
The method of claim 11,
The step of determining whether it is located in the rotatable position,
Sensing a current tilting angle of the seat from the backrest sensor;
Detecting a current moving position of the sheet from the long slide sensor; And
And the controller determining whether the current tilting angle and the current moving position satisfy a preset range.
상기 제어기는,
상기 현 틸팅각도 및 상기 현 이동위치가 미리 설정된 범위를 벗어난 경우, 상기 미리 설정된 범위를 만족하도록 상기 시트를 회동 또는 이동시키는 것을 특징으로 하는 차량용 회전시트의 제어방법.
The method of claim 15,
The controller,
When the current tilting angle and the current moving position is out of a preset range, the method for controlling a rotating seat for a vehicle, characterized in that the seat is rotated or moved to satisfy the preset range.
상기 제어기 안전모드 실행단계는,
상기 제어기의 입력전류 및 상기 시트의 회전속도 변화율이 미리 설정된 안전조건을 만족하는지 판단하는 단계; 및
상기 회전모터의 과전류를 감지하기 위한 스톨조건 감지단계를 포함하며,
상기 제어기는, 상기 스톨조건이 감지되면 상기 회전모터를 정지시키는 것을 특징으로 하는 차량용 회전시트의 제어방법.
The method of claim 11,
The controller safety mode execution step,
Determining whether the input current of the controller and the rate of change of the rotational speed of the seat satisfy a preset safety condition; And
And a stall condition detection step for detecting the overcurrent of the rotary motor,
The controller, when the stall condition is detected, the method of controlling a rotating seat for a vehicle, characterized in that to stop the rotating motor.
상기 제어기는,
상기 안전조건을 만족하지 못하거나 상기 스톨조건이 감지된 경우, 출력부로 안내가 출력되도록 제어하며, 차량 진단장치에 관련 정보를 전송하는 것을 특징으로 하는 차량용 회전시트의 제어방법.
The method of claim 18,
The controller,
When the safety condition is not satisfied or when the stall condition is detected, a control is performed so that a guide is output to the output unit, and a method of controlling a rotating seat for a vehicle is characterized in that the relevant information is transmitted to a vehicle diagnostic device.
상기 초기조건을 확인하는 단계는,
차량의 도어 오픈 여부를 감지하는 도어감지센서, 차량의 주차여부를 감지하는 파킹감지센서 및 차량의 정차여부를 감지하는 속도감지센서 중 적어도 어느 하나의 센서로부터 감지된 정보를 기초로 판단하는 것을 특징으로 하는 차량용 회전시트의 제어방법.
The method of claim 11,
Checking the initial conditions,
It is characterized by determining based on information detected from at least one of a door detection sensor for detecting whether a vehicle is open, a parking detection sensor for detecting whether a vehicle is parked, and a speed detection sensor for detecting whether a vehicle is stopped. Method for controlling a rotating seat for a vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190000705A KR20200084609A (en) | 2019-01-03 | 2019-01-03 | Rotating seat for vehicle and control method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190000705A KR20200084609A (en) | 2019-01-03 | 2019-01-03 | Rotating seat for vehicle and control method thereof |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200084609A true KR20200084609A (en) | 2020-07-13 |
Family
ID=71570710
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190000705A KR20200084609A (en) | 2019-01-03 | 2019-01-03 | Rotating seat for vehicle and control method thereof |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200084609A (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210276575A1 (en) * | 2020-03-04 | 2021-09-09 | Ford Global Technologies, Llc | Vehicle component identification system |
| CN113968175A (en) * | 2021-10-28 | 2022-01-25 | 长春富维安道拓汽车饰件系统有限公司 | Double-motor control method and system for automobile rotary seat |
| KR20220095907A (en) * | 2020-12-30 | 2022-07-07 | 대원산업 주식회사 | Power swivel control method and apparatus of seat for vehicle |
| CN114940106A (en) * | 2022-06-15 | 2022-08-26 | 大陆汽车研发(重庆)有限公司 | Anti-pinch method, device, equipment and storage medium for vehicle seat |
| KR20230032163A (en) * | 2021-08-30 | 2023-03-07 | 한국로봇융합연구원 | Swievel Seat Test Bed for Autonomous Vehicles |
| KR102586495B1 (en) * | 2022-12-23 | 2023-10-11 | 주식회사 금창 | Auto swivel seat and control method thereof |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101826513B1 (en) | 2016-07-29 | 2018-02-07 | 주식회사 서연이화 | Electric seat swivel for vehicle |
-
2019
- 2019-01-03 KR KR1020190000705A patent/KR20200084609A/en not_active Application Discontinuation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101826513B1 (en) | 2016-07-29 | 2018-02-07 | 주식회사 서연이화 | Electric seat swivel for vehicle |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210276575A1 (en) * | 2020-03-04 | 2021-09-09 | Ford Global Technologies, Llc | Vehicle component identification system |
| KR20220095907A (en) * | 2020-12-30 | 2022-07-07 | 대원산업 주식회사 | Power swivel control method and apparatus of seat for vehicle |
| KR20230032163A (en) * | 2021-08-30 | 2023-03-07 | 한국로봇융합연구원 | Swievel Seat Test Bed for Autonomous Vehicles |
| CN113968175A (en) * | 2021-10-28 | 2022-01-25 | 长春富维安道拓汽车饰件系统有限公司 | Double-motor control method and system for automobile rotary seat |
| CN114940106A (en) * | 2022-06-15 | 2022-08-26 | 大陆汽车研发(重庆)有限公司 | Anti-pinch method, device, equipment and storage medium for vehicle seat |
| CN114940106B (en) * | 2022-06-15 | 2023-11-24 | 大陆汽车研发(重庆)有限公司 | Anti-pinch method, device, equipment and storage medium for vehicle seat |
| KR102586495B1 (en) * | 2022-12-23 | 2023-10-11 | 주식회사 금창 | Auto swivel seat and control method thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200084609A (en) | Rotating seat for vehicle and control method thereof | |
| US7212897B2 (en) | Vehicle door controlling apparatus | |
| JP4134197B2 (en) | Control system for vehicle opening / closing body | |
| CN102264572B (en) | Vehicle seat control apparatus and control method thereof | |
| JP2009020657A (en) | Parking support device and program for parking support device | |
| US8989967B2 (en) | Vehicle seat device | |
| US7276872B2 (en) | Power window device | |
| JP2019055631A (en) | Seat device for vehicle | |
| JP4480596B2 (en) | Headrest control device for vehicle | |
| JP2014159220A (en) | Seat device and vehicular seat device | |
| EP4067163A1 (en) | Power swivel apparatus and power swivel control method using same | |
| JP4675621B2 (en) | Headrest control device | |
| JP2000326773A (en) | Driving device for swivel seat for vehicle | |
| JP5297051B2 (en) | Vehicle seat device and method for controlling vehicle seat device | |
| KR101875034B1 (en) | Car seat control apparatus | |
| JPS6226136A (en) | Device for adjusting seat for car | |
| JP2019012386A (en) | Control device | |
| JP7565825B2 (en) | Seat Control Device | |
| CN115871526B (en) | Automobile seat adjusting method and automobile seat adjusting system | |
| JP4186207B2 (en) | Vehicle sliding door control device | |
| JP2008012930A (en) | Seat device | |
| KR20190004881A (en) | Automobile and method for controlling automobile | |
| JP2012214193A (en) | Vehicle seat control device | |
| JP2008290668A (en) | Driver supporting device | |
| JP2011251630A (en) | On-vehicle equipment control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E601 | Decision to refuse application |