KR20200078648A - 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 - Google Patents
영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 Download PDFInfo
- Publication number
- KR20200078648A KR20200078648A KR1020207016731A KR20207016731A KR20200078648A KR 20200078648 A KR20200078648 A KR 20200078648A KR 1020207016731 A KR1020207016731 A KR 1020207016731A KR 20207016731 A KR20207016731 A KR 20207016731A KR 20200078648 A KR20200078648 A KR 20200078648A
- Authority
- KR
- South Korea
- Prior art keywords
- current block
- block
- prediction
- motion vector
- deriving
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 109
- 230000033001 locomotion Effects 0.000 claims abstract description 451
- 239000013598 vector Substances 0.000 claims abstract description 262
- 230000002123 temporal effect Effects 0.000 claims description 59
- 239000000523 sample Substances 0.000 description 150
- 230000002093 peripheral effect Effects 0.000 description 40
- 239000013074 reference sample Substances 0.000 description 18
- 230000008569 process Effects 0.000 description 14
- 238000013139 quantization Methods 0.000 description 13
- 238000001914 filtration Methods 0.000 description 9
- 230000003044 adaptive effect Effects 0.000 description 8
- 230000008707 rearrangement Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 238000000638 solvent extraction Methods 0.000 description 2
- 241000023320 Luma <angiosperm> Species 0.000 description 1
- 101100537098 Mus musculus Alyref gene Proteins 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 101150095908 apex1 gene Proteins 0.000 description 1
- 230000002146 bilateral effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 239000010454 slate Substances 0.000 description 1
- 239000004984 smart glass Substances 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/577—Motion compensation with bidirectional frame interpolation, i.e. using B-pictures
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/132—Sampling, masking or truncation of coding units, e.g. adaptive resampling, frame skipping, frame interpolation or high-frequency transform coefficient masking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
- H04N19/139—Analysis of motion vectors, e.g. their magnitude, direction, variance or reliability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
- H04N19/463—Embedding additional information in the video signal during the compression process by compressing encoding parameters before transmission
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
본 발명에 따른 디코딩 장치에 의하여 수행되는 영상 디코딩 방법은 참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출하는 단계, 현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함하는 단계, 서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 판단하는 단계, 상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출하는 단계, 및 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출하는 단계를 포함하는 것을 특징으로 한다.
Description
본 발명은 영상 코딩 기술에 관한 것으로서 보다 상세하게는 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치에 관한 것이다.
최근 HD(High Definition) 영상 및 UHD(Ultra High Definition) 영상과 같은 고해상도, 고품질의 영상에 대한 수요가 다양한 분야에서 증가하고 있다. 영상 데이터가 고해상도, 고품질이 될수록 기존의 영상 데이터에 비해 상대적으로 전송되는 정보량 또는 비트량이 증가하기 때문에 기존의 유무선 광대역 회선과 같은 매체를 이용하여 영상 데이터를 전송하거나 기존의 저장 매체를 이용해 영상 데이터를 저장하는 경우, 전송 비용과 저장 비용이 증가된다.
이에 따라, 고해상도, 고품질 영상의 정보를 효과적으로 전송하거나 저장하고, 재생하기 위해 고효율의 영상 압축 기술이 요구된다.
본 발명의 기술적 과제는 영상 코딩 효율을 높이는 방법 및 장치를 제공함에 있다.
본 발명의 기술적 과제는 인터 예측 효율을 높이는 방법 및 장치를 제공함에 있다.
본 발명의 또 다른 기술적 과제는 BIO 예측을 적용하여 서브 블록 단위의 리파인 움직임 벡터를 도출하는 방법 및 장치를 제공함에 있다.
본 발명의 또 다른 기술적 과제는 BIO 예측 적용 여부를 판단하여 리파인 움직임 벡터를 도출하는 계산의 계산 복잡도를 낮추는 방법 및 장치를 제공함에 있다.
본 발명의 일 실시예에 따르면, 디코딩 장치에 의하여 수행되는 영상 디코딩 방법이 제공된다. 상기 방법은 참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출하는 단계, 현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함하는 단계, 서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 판단하는 단계, 상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출하는 단계, 및 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출하는 단계를 포함하는 것을 특징으로 한다.
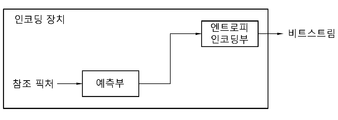
본 발명의 다른 일 실시예에 따르면, 영상 디코딩을 수행하는 디코딩 장치가 제공된다. 상기 디코딩 장치는 비트스트림을 통하여 현재 블록의 인터 예측에 대한 정보를 획득하는 엔트로피 디코딩부, 및 참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출하고, 상기 현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함하고, 서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 판단하고, 상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출하고, 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출하는 예측부를 포함하는 것을 특징으로 한다.
본 발명의 또 다른 일 실시예에 따르면, 인코딩 장치에 의하여 수행되는 비디오 인코딩 방법을 제공한다. 상기 방법은 참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출하는 단계, 현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함하는 단계, 서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 결정하는 단계, 상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출하는 단계, 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출하는 단계; 및 상기 현재 블록의 인터 예측에 대한 정보를 엔트로피 인코딩하는 단계를 포함하는 것을 특징으로 한다.
본 발명의 또 다른 일 실시예에 따르면, 비디오 인코딩 장치를 제공한다. 상기 인코딩 장치는 참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출하고, 현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함하고, 서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 결정하고, 상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출하고, 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출하는 예측부, 및 상기 현재 블록의 인터 예측에 대한 정보를 엔트로피 인코딩하는 엔트로피 인코딩부를 포함하는 것을 특징으로 한다.
본 발명에 따르면 현재 블록의 BIO 예측 적용 여부를 판단하여 서브 블록 단위로 도출되는 리파인 움직임 벡터를 사용하는 인터 예측의 계산 복잡도를 낮출 수 있고, 이를 통하여 전체적인 코딩 효율을 향상시킬 수 있다.
본 발명에 따르면 FRUC 의 모드를 기반으로 BIO 예측 적용 여부를 판단하여 서브 블록 단위로 도출되는 리파인 움직임 벡터를 사용하는 인터 예측의 계산 복잡도를 낮출 수 있고, 이를 통하여 전체적인 코딩 효율을 향상시킬 수 있다.
도 1은 본 발명이 적용될 수 있는 비디오 인코딩 장치의 구성을 개략적으로 설명하는 도면이다.
도 2는 본 발명이 적용될 수 있는 비디오 디코딩 장치의 구성을 개략적으로 설명하는 도면이다.
도 3은 BCC 및 물체가 짧은 시간동안 일정한 속도로 움직인다고 가정할 때의 쌍예측 움직임 벡터들을 예시적으로 나타낸다.
도 4는 샘플 기반 BIO 예측과 블록 기반 BIO 예측이 수행되는 일 예를 나타낸다.
도 5는 현재 블록의 사이즈를 기반으로 상기 BIO 예측의 적용 여부를 결정하는 일 예를 나타낸다.
도 6은 상기 BM 방법을 통한 움직임 정보를 도출하는 일 예를 예시적으로 나타낸다.
도 7은 상기 TM 방법을 통한 움직임 정보를 도출하는 일 예를 예시적으로 나타낸다.
도 8a 내지 도 8b는 FRUC 를 기반으로 수행되는 인코딩 과정 및 디코딩 과정의 일 예를 나타낸다.
도 9a 내지 도 9b는 FRUC 및/또는 BIO 가 적용된 현재 블록을 인코딩/디코딩하는 일 예를 나타낸다.
도 10은 본 발명에 따른 인코딩 장치에 의한 영상 인코딩 방법을 개략적으로 나타낸다.
도 11은 본 발명에 따른 영상 인코딩 방법을 수행하는 인코딩 장치를 개략적으로 나타낸다.
도 12는 본 발명에 따른 디코딩 장치에 의한 영상 디코딩 방법을 개략적으로 나타낸다.
도 13은 본 발명에 따른 영상 디코딩 방법을 수행하는 디코딩 장치를 개략적으로 나타낸다.
도 2는 본 발명이 적용될 수 있는 비디오 디코딩 장치의 구성을 개략적으로 설명하는 도면이다.
도 3은 BCC 및 물체가 짧은 시간동안 일정한 속도로 움직인다고 가정할 때의 쌍예측 움직임 벡터들을 예시적으로 나타낸다.
도 4는 샘플 기반 BIO 예측과 블록 기반 BIO 예측이 수행되는 일 예를 나타낸다.
도 5는 현재 블록의 사이즈를 기반으로 상기 BIO 예측의 적용 여부를 결정하는 일 예를 나타낸다.
도 6은 상기 BM 방법을 통한 움직임 정보를 도출하는 일 예를 예시적으로 나타낸다.
도 7은 상기 TM 방법을 통한 움직임 정보를 도출하는 일 예를 예시적으로 나타낸다.
도 8a 내지 도 8b는 FRUC 를 기반으로 수행되는 인코딩 과정 및 디코딩 과정의 일 예를 나타낸다.
도 9a 내지 도 9b는 FRUC 및/또는 BIO 가 적용된 현재 블록을 인코딩/디코딩하는 일 예를 나타낸다.
도 10은 본 발명에 따른 인코딩 장치에 의한 영상 인코딩 방법을 개략적으로 나타낸다.
도 11은 본 발명에 따른 영상 인코딩 방법을 수행하는 인코딩 장치를 개략적으로 나타낸다.
도 12는 본 발명에 따른 디코딩 장치에 의한 영상 디코딩 방법을 개략적으로 나타낸다.
도 13은 본 발명에 따른 영상 디코딩 방법을 수행하는 디코딩 장치를 개략적으로 나타낸다.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정 실시예에 한정하려고 하는 것이 아니다. 본 명세서에서 상용하는 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명의 기술적 사상을 한정하려는 의도로 사용되는 것은 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 명세서에서 "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성 요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성 요소, 부품 도는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
한편, 본 발명에서 설명되는 도면상의 각 구성들은 서로 다른 특징적인 기능들에 관한 설명의 편의를 위해 독립적으로 도시된 것으로서, 각 구성들이 서로 별개의 하드웨어나 별개의 소프트웨어로 구현된다는 것을 의미하지는 않는다. 예컨대, 각 구성 중 두 개 이상의 구성이 합쳐져 하나의 구성을 이룰 수도 있고, 하나의 구성이 복수의 구성으로 나뉘어질 수도 있다. 각 구성이 통합 및/또는 분리된 실시예도 본 발명의 본질에서 벗어나지 않는 한 본 발명의 권리범위에 포함된다.
이하, 첨부한 도면들을 참조하여, 본 발명의 바람직한 실시예를 보다 상세하게 설명하고자 한다. 이하, 도면상의 동일한 구성 요소에 대해서는 동일한 참조 부호를 사용하고 동일한 구성 요소에 대해서 중복된 설명은 생략한다.
한편, 본 발명은 비디오/영상 코딩에 관한 것이다. 예를 들어, 본 발명에서 개시된 방법/실시예는 VVC (versatile video coding) 표준 또는 차세대 비디오/이미지 코딩 표준에 개시된 방법에 적용될 수 있다.
본 명세서에서 픽처(picture)는 일반적으로 특정 시간대의 하나의 영상을 나타내는 단위를 의미하며, 슬라이스(slice)는 코딩에 있어서 픽처의 일부를 구성하는 단위이다. 하나의 픽처는 복수의 슬라이스로 구성될 수 있으며, 필요에 따라서 픽처 및 슬라이스는 서로 혼용되어 사용될 수 있다.
픽셀(pixel) 또는 펠(pel)은 하나의 픽처(또는 영상)을 구성하는 최소의 단위를 의미할 수 있다. 또한, 픽셀에 대응하는 용어로서 '샘플(sample)'이 사용될 수 있다. 샘플은 일반적으로 픽셀 또는 픽셀의 값을 나타낼 수 있으며, 휘도(luma) 성분의 픽셀/픽셀값만을 나타낼 수도 있고, 채도(chroma) 성분의 픽셀/픽셀 값만을 나타낼 수도 있다.
유닛(unit)은 영상 처리의 기본 단위를 나타낸다. 유닛은 픽처의 특정 영역 및 해당 영역에 관련된 정보 중 적어도 하나를 포함할 수 있다. 유닛은 경우에 따라서 블록(block) 또는 영역(area) 등의 용어와 혼용하여 사용될 수 있다. 일반적인 경우, MxN 블록은 M개의 열과 N개의 행으로 이루어진 샘플들 또는 변환 계수(transform coefficient)들의 집합을 나타낼 수 있다.
도 1은 본 발명이 적용될 수 있는 비디오 인코딩 장치의 구성을 개략적으로 설명하는 도면이다.
도 1을 참조하면, 비디오 인코딩 장치(100)는 픽처 분할부(105), 예측부(110), 레지듀얼 처리부(120), 엔트로피 인코딩부(130), 가산부(140), 필터부(150) 및 메모리(160)을 포함할 수 있다. 레지듀얼 처리부(120)는 감산부(121), 변환부(122), 양자화부(123), 재정렬부(124), 역양자화부(125) 및 역변환부(126)를 포함할 수 있다.
픽처 분할부(105)는 입력된 픽처를 적어도 하나의 처리 유닛(processing unit)으로 분할할 수 있다.
일 예로, 처리 유닛은 코딩 유닛(coding unit, CU)이라고 불릴 수 있다. 이 경우 코딩 유닛은 최대 코딩 유닛(largest coding unit, LCU)으로부터 QTBT (Quad-tree binary-tree) 구조에 따라 재귀적으로(recursively) 분할될 수 있다. 예를 들어, 하나의 코딩 유닛은 쿼드 트리 구조 및/또는 바이너리 트리 구조를 기반으로 하위(deeper) 뎁스의 복수의 코딩 유닛들로 분할될 수 있다. 이 경우 예를 들어 쿼드 트리 구조가 먼저 적용되고 바이너리 트리 구조가 나중에 적용될 수 있다. 또는 바이너리 트리 구조가 먼저 적용될 수도 있다. 더 이상 분할되지 않는 최종 코딩 유닛을 기반으로 본 발명에 따른 코딩 절차가 수행될 수 있다. 이 경우 영상 특성에 따른 코딩 효율 등을 기반으로, 최대 코딩 유닛이 바로 최종 코딩 유닛으로 사용될 수 있고, 또는 필요에 따라 코딩 유닛은 재귀적으로(recursively) 보다 하위 뎁스의 코딩 유닛들로 분할되어 최적의 사이즈의 코딩 유닛이 최종 코딩 유닛으로 사용될 수 있다. 여기서 코딩 절차라 함은 후술하는 예측, 변환, 및 복원 등의 절차를 포함할 수 있다.
다른 예로, 처리 유닛은 코딩 유닛(coding unit, CU) 예측 유닛(prediction unit, PU) 또는 변환 유닛(transform unit, TU)을 포함할 수도 있다. 코딩 유닛은 최대 코딩 유닛(largest coding unit, LCU)으로부터 쿼드 트리 구조를 따라서 하위(deeper) 뎁스의 코딩 유닛들로 분할(split)될 수 있다. 이 경우 영상 특성에 따른 코딩 효율 등을 기반으로, 최대 코딩 유닛이 바로 최종 코딩 유닛으로 사용될 수 있고, 또는 필요에 따라 코딩 유닛은 재귀적으로(recursively) 보다 하위 뎁스의 코딩 유닛들로 분할되어 최적의 사이즈의 코딩 유닛이 최종 코딩 유닛으로 사용될 수 있다. 최소 코딩 유닛(smallest coding unit, SCU)이 설정된 경우 코딩 유닛은 최소 코딩 유닛보다 더 작은 코딩 유닛으로 분할될 수 없다. 여기서 최종 코딩 유닛이라 함은 예측 유닛 또는 변환 유닛으로 파티셔닝 또는 분할되는 기반이 되는 코딩 유닛을 의미한다. 예측 유닛은 코딩 유닛으로부터 파티셔닝(partitioning)되는 유닛으로서, 샘플 예측의 유닛일 수 있다. 이 때, 예측 유닛은 서브 블록(sub block)으로 나뉠 수도 있다. 변환 유닛은 코딩 유닛으로부터 쿼드 트리 구조를 따라서 분할 될 수 있으며, 변환 계수를 유도하는 유닛 및/또는 변환 계수로부터 레지듀얼 신호(residual signal)를 유도하는 유닛일 수 있다. 이하, 코딩 유닛은 코딩 블록(coding block, CB), 예측 유닛은 예측 블록(prediction block, PB), 변환 유닛은 변환 블록(transform block, TB) 으로 불릴 수 있다. 예측 블록 또는 예측 유닛은 픽처 내에서 블록 형태의 특정 영역을 의미할 수 있고, 예측 샘플의 어레이(array)를 포함할 수 있다. 또한, 변환 블록 또는 변환 유닛은 픽처 내에서 블록 형태의 특정 영역을 의미할 수 있고, 변환 계수 또는 레지듀얼 샘플의 어레이를 포함할 수 있다.
예측부(110)는 처리 대상 블록(이하, 현재 블록이라 함)에 대한 예측을 수행하고, 상기 현재 블록에 대한 예측 샘플들을 포함하는 예측된 블록(predicted block)을 생성할 수 있다. 예측부(110)에서 수행되는 예측의 단위는 코딩 블록일 수 있고, 변환 블록일 수도 있고, 예측 블록일 수도 있다.
예측부(110)는 현재 블록에 인트라 예측이 적용되는지 인터 예측이 적용되는지를 결정할 수 있다. 일 예로, 예측부(110)는 CU 단위로 인트라 예측 또는 인터 예측이 적용되는지를 결정할 수 있다.
인트라 예측의 경우에, 예측부(110)는 현재 블록이 속하는 픽처(이하, 현재 픽처) 내의 현재 블록 외부의 참조 샘플을 기반으로 현재 블록에 대한 예측 샘플을 유도할 수 있다. 이 때, 예측부(110)는 (i) 현재 블록의 주변(neighboring) 참조 샘플들의 평균(average) 혹은 인터폴레이션(interpolation)을 기반으로 예측 샘플을 유도할 수 있고, (ii) 현재 블록의 주변 참조 샘플들 중 예측 샘플에 대하여 특정 (예측) 방향에 존재하는 참조 샘플을 기반으로 상기 예측 샘플을 유도할 수도 있다. (i)의 경우는 비방향성 모드 또는 비각도 모드, (ii)의 경우는 방향성(directional) 모드 또는 각도(angular) 모드라고 불릴 수 있다. 인트라 예측에서 예측 모드는 예를 들어 33개의 방향성 예측 모드와 적어도 2개 이상의 비방향성 모드를 가질 수 있다. 비방향성 모드는 DC 예측 모드 및 플래너 모드(Planar 모드)를 포함할 수 있다. 예측부(110)는 주변 블록에 적용된 예측 모드를 이용하여, 현재 블록에 적용되는 예측 모드를 결정할 수도 있다.
인터 예측의 경우에, 예측부(110)는 참조 픽처 상에서 움직임 벡터에 의해 특정되는 샘플을 기반으로, 현재 블록에 대한 예측 샘플을 유도할 수 있다. 예측부(110)는 스킵(skip) 모드, 머지(merge) 모드, 및 MVP(motion vector prediction) 모드 중 어느 하나를 적용하여 현재 블록에 대한 예측 샘플을 유도할 수 있다. 스킵 모드와 머지 모드의 경우에, 예측부(110)는 주변 블록의 움직임 정보를 현재 블록의 움직임 정보로 이용할 수 있다. 스킵 모드의 경우, 머지 모드와 달리 예측 샘플과 원본 샘플 사이의 차(레지듀얼)가 전송되지 않는다. MVP 모드의 경우, 주변 블록의 움직임 벡터를 움직임 벡터 예측자(Motion Vector Predictor)로 이용하여 현재 블록의 움직임 벡터 예측자로 이용하여 현재 블록의 움직임 벡터를 유도할 수 있다.
인터 예측의 경우에, 주변 블록은 현재 픽처 내에 존재하는 공간적 주변 블록(spatial neighboring block)과 참조 픽처(reference picture)에 존재하는 시간적 주변 블록(temporal neighboring block)을 포함할 수 있다. 상기 시간적 주변 블록을 포함하는 참조 픽처는 동일 위치 픽처(collocated picture, colPic)라고 불릴 수도 있다. 움직임 정보(motion information)는 움직임 벡터와 참조 픽처 인덱스를 포함할 수 있다. 예측 모드 정보와 움직임 정보 등의 정보는 (엔트로피) 인코딩되어 비트스트림 형태로 출력될 수 있다.
스킵 모드와 머지 모드에서 시간적 주변 블록의 움직임 정보가 이용되는 경우에, 참조 픽처 리스트(reference picture list) 상의 최상위 픽처가 참조 픽처로서 이용될 수도 있다. 참조 픽처 리스트(Picture Order Count)에 포함되는 참조 픽처들은 현재 픽처와 해당 참조 픽처 간의 POC(Picture order count) 차이 기반으로 정렬될 수 있다. POC는 픽처의 디스플레이 순서에 대응하며, 코딩 순서와 구분될 수 있다.
감산부(121)는 원본 샘플과 예측 샘플 간의 차이인 레지듀얼 샘플을 생성한다. 스킵 모드가 적용되는 경우에는, 상술한 바와 같이 레지듀얼 샘플을 생성하지 않을 수 있다.
변환부(122)는 변환 블록 단위로 레지듀얼 샘플을 변환하여 변환 계수(transform coefficient)를 생성한다. 변환부(122)는 해당 변환 블록의 사이즈와, 해당 변환 블록과 공간적으로 겹치는 코딩 블록 또는 예측 블록에 적용된 예측 모드에 따라서 변환을 수행할 수 있다. 예컨대, 상기 변환 블록과 겹치는 상기 코딩 블록 또는 상기 예측 블록에 인트라 예측이 적용되었고, 상기 변환 블록이 4×4의 레지듀얼 어레이(array)라면, 레지듀얼 샘플은 DST(Discrete Sine Transform) 변환 커널을 이용하여 변환되고, 그 외의 경우라면 레지듀얼 샘플은 DCT(Discrete Cosine Transform) 변환 커널을 이용하여 변환할 수 있다.
양자화부(123)는 변환 계수들을 양자화하여, 양자화된 변환 계수를 생성할 수 있다.
재정렬부(124)는 양자화된 변환 계수를 재정렬한다. 재정렬부(124)는 계수들 스캐닝(scanning) 방법을 통해 블록 형태의 양자화된 변환 계수들을 1차원 벡터 형태로 재정렬할 수 있다. 여기서 재정렬부(124)는 별도의 구성으로 설명하였으나, 재정렬부(124)는 양자화부(123)의 일부일 수 있다.
엔트로피 인코딩부(130)는 양자화된 변환 계수들에 대한 엔트로피 인코딩을 수행할 수 있다. 엔트로피 인코딩은 예를 들어 지수 골롬(exponential Golomb), CAVLC(context-adaptive variable length coding), CABAC(context-adaptive binary arithmetic coding) 등과 같은 인코딩 방법을 포함할 수 있다. 엔트로피 인코딩부(130)는 양자화된 변환 계수 외 비디오 복원에 필요한 정보들(예컨대 신택스 요소(syntax element)의 값 등)을 함께 또는 별도로 인코딩할 수도 있다. 엔트로피 인코딩된 정보들은 비트스트림 형태로 NAL(network abstraction layer) 유닛 단위로 전송 또는 저장될 수 있다.
역양자화부(125)는 양자화부(123)에서 양자화된 값(양자화된 변환 계수)들을 역양자화하고, 역변환부(126)는 역양자화부(125)에서 역양자화된 값들을 역변환하여 레지듀얼 샘플을 생성한다.
가산부(140)는 레지듀얼 샘플과 예측 샘플을 합쳐서 픽처를 복원한다. 레지듀얼 샘플과 예측 샘플은 블록 단위로 더해져서 복원 블록이 생성될 수 있다. 여기서 가산부(140)는 별도의 구성으로 설명하였으나, 가산부(140)는 예측부(110)의 일부일 수 있다. 한편, 가산부(140)는 복원부 또는 복원 블록 생성부로 불릴 수도 있다.
복원된 픽처(reconstructed picture)에 대하여 필터부(150)는 디블록킹 필터 및/또는 샘플 적응적 오프셋(sample adaptive offset)을 적용할 수 있다. 디블록킹 필터링 및/또는 샘플 적응적 오프셋을 통해, 복원 픽처 내 블록 경계의 아티팩트나 양자화 과정에서의 왜곡이 보정될 수 있다. 샘플 적응적 오프셋은 샘플 단위로 적용될 수 있으며, 디블록킹 필터링의 과정이 완료된 후 적용될 수 있다. 필터부(150)는 ALF(Adaptive Loop Filter)를 복원된 픽처에 적용할 수도 있다. ALF는 디블록킹 필터 및/또는 샘플 적응적 오프셋이 적용된 후의 복원된 픽처에 대하여 적용될 수 있다.
메모리(160)는 복원 픽처(디코딩된 픽처) 또는 인코딩/디코딩에 필요한 정보를 저장할 수 있다. 여기서 복원 픽처는 상기 필터부(150)에 의하여 필터링 절차가 완료된 복원 픽처일 수 있다. 상기 저장된 복원 픽처는 다른 픽처의 (인터) 예측을 위한 참조 픽처로 활용될 수 있다. 예컨대, 메모리(160)는 인터 예측에 사용되는 (참조) 픽처들을 저장할 수 있다. 이 때, 인터 예측에 사용되는 픽처들은 참조 픽처 세트(reference picture set) 혹은 참조 픽처 리스트(reference picture list)에 의해 지정될 수 있다.
도 2는 본 발명이 적용될 수 있는 비디오 디코딩 장치의 구성을 개략적으로 설명하는 도면이다.
도 2를 참조하면, 비디오 디코딩 장치(200)는 엔트로피 디코딩부(210), 레지듀얼 처리부(220), 예측부(230), 가산부(240), 필터부(250) 및 메모리(260)을 포함할 수 있다. 여기서 레지듀얼 처리부(220)는 재정렬부(221), 역양자화부(222), 역변환부(223)을 포함할 수 있다.
비디오 정보를 포함하는 비트스트림이 입력되면, 비디오 디코딩 장치(200)는 비디오 인코딩 장치에서 비디오 정보가 처리된 프로세스에 대응하여 비디오를 복원할 수 있다.
예컨대, 비디오 디코딩 장치(200)는 비디오 인코딩 장치에서 적용된 처리 유닛을 이용하여 비디오 디코딩을 수행할 수 있다. 따라서 비디오 디코딩의 처리 유닛 블록은 일 예로 코딩 유닛일 수 있고, 다른 예로 코딩 유닛, 예측 유닛 또는 변환 유닛일 수 있다. 코딩 유닛은 최대 코딩 유닛으로부터 쿼드 트리 구조 및/또는 바이너리 트리 구조를 따라서 분할될 수 있다.
예측 유닛 및 변환 유닛이 경우에 따라 더 사용될 수 있으며, 이 경우 예측 블록은 코딩 유닛으로부터 도출 또는 파티셔닝되는 블록으로서, 샘플 예측의 유닛일 수 있다. 이 때, 예측 유닛은 서브 블록으로 나뉠 수도 있다. 변환 유닛은 코딩 유닛으로부터 쿼드 트리 구조를 따라서 분할 될 수 있으며, 변환 계수를 유도하는 유닛 또는 변환 계수로부터 레지듀얼 신호를 유도하는 유닛일 수 있다.
엔트로피 디코딩부(210)는 비트스트림을 파싱하여 비디오 복원 또는 픽처 복원에 필요한 정보를 출력할 수 있다. 예컨대, 엔트로피 디코딩부(210)는 지수 골롬 부호화, CAVLC 또는 CABAC 등의 코딩 방법을 기초로 비트스트림 내 정보를 디코딩하고, 비디오 복원에 필요한 신택스 엘리먼트의 값, 레지듀얼에 관한 변환 계수의 양자화된 값 들을 출력할 수 있다.
보다 상세하게, CABAC 엔트로피 디코딩 방법은, 비트스트림에서 각 구문 요소에 해당하는 빈을 수신하고, 디코딩 대상 구문 요소 정보와 주변 및 디코딩 대상 블록의 디코딩 정보 혹은 이전 단계에서 디코딩된 심볼/빈의 정보를 이용하여 문맥(context) 모델을 결정하고, 결정된 문맥 모델에 따라 빈(bin)의 발생 확률을 예측하여 빈의 산술 디코딩(arithmetic decoding)를 수행하여 각 구문 요소의 값에 해당하는 심볼을 생성할 수 있다. 이때, CABAC 엔트로피 디코딩 방법은 문맥 모델 결정 후 다음 심볼/빈의 문맥 모델을 위해 디코딩된 심볼/빈의 정보를 이용하여 문맥 모델을 업데이트할 수 있다.
엔트로피 디코딩부(210)에서 디코딩된 정보 중 예측에 관한 정보는 예측부(230)로 제공되고, 엔트로피 디코딩부(210)에서 엔트로피 디코딩이 수행된 레지듀얼 값, 즉 양자화된 변환 계수는 재정렬부(221)로 입력될 수 있다.
재정렬부(221)는 양자화되어 있는 변환 계수들을 2차원의 블록 형태로 재정렬할 수 있다. 재정렬부(221)는 인코딩 장치에서 수행된 계수 스캐닝에 대응하여 재정렬을 수행할 수 있다. 여기서 재정렬부(221)는 별도의 구성으로 설명하였으나, 재정렬부(221)는 역양자화부(222)의 일부일 수 있다.
역양자화부(222)는 양자화되어 있는 변환 계수들을 (역)양자화 파라미터를 기반으로 역양자화하여 변환 계수를 출력할 수 있다. 이 때, 양자화 파라미터를 유도하기 위한 정보는 인코딩 장치로부터 시그널링될 수 있다.
역변환부(223)는 변환 계수들을 역변환하여 레지듀얼 샘플들을 유도할 수 있다.
예측부(230)는 현재 블록에 대한 예측을 수행하고, 상기 현재 블록에 대한 예측 샘플들을 포함하는 예측된 블록(predicted block)을 생성할 수 있다. 예측부(230)에서 수행되는 예측의 단위는 코딩 블록일 수도 있고, 변환 블록일 수도 있고, 예측 블록일 수도 있다.
예측부(230)는 상기 예측에 관한 정보를 기반으로 인트라 예측을 적용할 것인지 인터 예측을 적용할 것인지를 결정할 수 있다. 이 때, 인트라 예측과 인터 예측 중 어느 것을 적용할 것인지를 결정하는 단위와 예측 샘플을 생성하는 단위는 상이할 수 있다. 아울러, 인터 예측과 인트라 예측에 있어서 예측 샘플을 생성하는 단위 또한 상이할 수 있다. 예를 들어, 인터 예측과 인트라 예측 중 어느 것을 적용할 것인지는 CU 단위로 결정할 수 있다. 또한 예를 들어, 인터 예측에 있어서 PU 단위로 예측 모드를 결정하고 예측 샘플을 생성할 수 있고, 인트라 예측에 있어서 PU 단위로 예측 모드를 결정하고 TU 단위로 예측 샘플을 생성할 수도 있다.
인트라 예측의 경우에, 예측부(230)는 현재 픽처 내의 주변 참조 샘플을 기반으로 현재 블록에 대한 예측 샘플을 유도할 수 있다. 예측부(230)는 현재 블록의 주변 참조 샘플을 기반으로 방향성 모드 또는 비방향성 모드를 적용하여 현재 블록에 대한 예측 샘플을 유도할 수 있다. 이 때, 주변 블록의 인트라 예측 모드를 이용하여 현재 블록에 적용할 예측 모드가 결정될 수도 있다.
인터 예측의 경우에, 예측부(230)는 참조 픽처 상에서 움직임 벡터에 의해 참조 픽처 상에서 특정되는 샘플을 기반으로 현재 블록에 대한 예측 샘플을 유도할 수 있다. 예측부(230)는 스킵(skip) 모드, 머지(merge) 모드 및 MVP 모드 중 어느 하나를 적용하여 현재 블록에 대한 예측 샘플을 유도할 수 있다. 이때, 비디오 인코딩 장치에서 제공된 현재 블록의 인터 예측에 필요한 움직임 정보, 예컨대 움직임 벡터, 참조 픽처 인덱스 등에 관한 정보는 상기 예측에 관한 정보를 기반으로 획득 또는 유도될 수 있다
스킵 모드와 머지 모드의 경우에, 주변 블록의 움직임 정보가 현재 블록의 움직임 정보로 이용될 수 있다. 이 때, 주변 블록은 공간적 주변 블록과 시간적 주변 블록을 포함할 수 있다.
예측부(230)는 가용한 주변 블록의 움직임 정보로 머지 후보 리스트를 구성하고, 머지 인덱스가 머지 후보 리스트 상에서 지시하는 정보를 현재 블록의 움직임 벡터로 사용할 수 있다. 머지 인덱스는 인코딩 장치로부터 시그널링될 수 있다. 움직임 정보는 움직임 벡터와 참조 픽처를 포함할 수 있다. 스킵 모드와 머지 모드에서 시간적 주변 블록의 움직임 정보가 이용되는 경우에, 참조 픽처 리스트 상의 최상위 픽처가 참조 픽처로서 이용될 수 있다.
스킵 모드의 경우, 머지 모드와 달리 예측 샘플과 원본 샘플 사이의 차이(레지듀얼)이 전송되지 않는다.
MVP 모드의 경우, 주변 블록의 움직임 벡터를 움직임 벡터 예측자(motion vector predictor)로 이용하여 현재 블록의 움직임 벡터가 유도될 수 있다. 이 때, 주변 블록은 공간적 주변 블록과 시간적 주변 블록을 포함할 수 있다.
일 예로, 머지 모드가 적용되는 경우, 복원된 공간적 주변 블록의 움직임 벡터 및/또는 시간적 주변 블록인 Col 블록에 대응하는 움직임 벡터를 이용하여, 머지 후보 리스트가 생성될 수 있다. 머지 모드에서는 머지 후보 리스트에서 선택된 후보 블록의 움직임 벡터가 현재 블록의 움직임 벡터로 사용된다. 상기 예측에 관한 정보는 상기 머지 후보 리스트에 포함된 후보 블록들 중에서 선택된 최적의 움직임 벡터를 갖는 후보 블록을 지시하는 머지 인덱스를 포함할 수 있다. 이 때, 예측부(230)는 상기 머지 인덱스를 이용하여, 현재 블록의 움직임 벡터를 도출할 수 있다.
다른 예로, MVP(Motion Vector Prediction) 모드가 적용되는 경우, 복원된 공간적 주변 블록의 움직임 벡터 및/또는 시간적 주변 블록인 Col 블록에 대응하는 움직임 벡터를 이용하여, 움직임 벡터 예측자 후보 리스트가 생성될 수 있다. 즉, 복원된 공간적 주변 블록의 움직임 벡터 및/또는 시간적 주변 블록인 Col 블록에 대응하는 움직임 벡터는 움직임 벡터 후보로 사용될 수 있다. 상기 예측에 관한 정보는 상기 리스트에 포함된 움직임 벡터 후보 중에서 선택된 최적의 움직임 벡터를 지시하는 예측 움직임 벡터 인덱스를 포함할 수 있다. 이 때, 예측부(230)는 상기 움직임 벡터 인덱스를 이용하여, 움직임 벡터 후보 리스트에 포함된 움직임 벡터 후보 중에서, 현재 블록의 예측 움직임 벡터를 선택할 수 있다. 인코딩 장치의 예측부는 현재 블록의 움직임 벡터와 움직임 벡터 예측자 간의 움직임 벡터 차분(MVD)을 구할 수 있고, 이를 인코딩하여 비트스트림 형태로 출력할 수 있다. 즉, MVD는 현재 블록의 움직임 벡터에서 상기 움직임 벡터 예측자를 뺀 값으로 구해질 수 있다. 이 때, 예측부(230)는 상기 예측에 관한 정보에 포함된 움직임 벡터 차분을 획득하고, 상기 움직임 벡터 차분과 상기 움직임 벡터 예측자의 가산을 통해 현재 블록의 상기 움직임 벡터를 도출할 수 있다. 예측부는 또한 참조 픽처를 지시하는 참조 픽처 인덱스 등을 상기 예측에 관한 정보로부터 획득 또는 유도할 수 있다.
가산부(240)는 레지듀얼 샘플과 예측 샘플을 더하여 현재 블록 혹은 현재 픽처를 복원할 수 있다. 가산부(240)는 레지듀얼 샘플과 예측 샘플을 블록 단위로 더하여 현재 픽처를 복원할 수도 있다. 스킵 모드가 적용된 경우에는 레지듀얼이 전송되지 않으므로, 예측 샘플이 복원 샘플이 될 수 있다. 여기서는 가산부(240)를 별도의 구성으로 설명하였으나, 가산부(240)는 예측부(230)의 일부일 수도 있다. 한편, 가산부(240)는 복원부 또는 복원 블록 생성부로 불릴 수도 있다.
필터부(250)는 복원된 픽처에 디블록킹 필터링 샘플 적응적 오프셋, 및/또는 ALF 등을 적용할 수 있다. 이 때, 샘플 적응적 오프셋은 샘플 단위로 적용될 수 있으며, 디블록킹 필터링 이후 적용될 수도 있다. ALF는 디블록킹 필터링 및/또는 샘플 적응적 오프셋 이후 적용될 수도 있다.
메모리(260)는 복원 픽처(디코딩된 픽처) 또는 디코딩에 필요한 정보를 저장할 수 있다. 여기서 복원 픽처는 상기 필터부(250)에 의하여 필터링 절차가 완료된 복원 픽처일 수 있다. 예컨대, 메모리(260)는 인터 예측에 사용되는 픽처들을 저장할 수 있다. 이 때, 인터 예측에 사용되는 픽처들은 참조 픽처 세트 혹은 참조 픽처 리스트에 의해 지정될 수도 있다. 복원된 픽처는 다른 픽처에 대한 참조 픽처로서 이용될 수 있다. 또한, 메모리(260)는 복원된 픽처를 출력 순서에 따라서 출력할 수도 있다.
상술한 내용과 같이 현재 블록에 대한 인터 예측을 위하여 하나 또는 두개의 참조 픽처 리스트가 사용될 수 있다. 즉, 현재 블록에 대한 인터 예측을 위하여 참조 픽처 리스트 0 또는 참조 픽처 리스트 1이 사용될 수 있고, 또는 참조 픽처 리스트 0 또는 참조 픽처 리스트 1 모두가 구성될 수 있다. 예를 들어 현재 블록이 포함된 슬라이스의 슬라이스 타입이 B(B slice)인 경우 상기 두 개의 참조 픽처 리스트 중 적어도 하나가 사용될 수 있고, 상기 현재 블록이 포함된 상기 슬라이스의 슬라이스 타입이 P(P slice)인 경우 상기 참조 픽처 리스트 0만 사용될 수도 있다. 상기 참조 픽처 리스트 0은 L0(List 0)라고 불릴 수 있고, 상기 참조 픽처 리스트 1은 L1(List 1)이라고 불릴 수 있다. 현재 블록에 대한 예측을 수행함에 있어, 인터 예측에 대한 움직임 정보는 쌍예측 움직임 정보 또는 단예측 움직임 정보일 수 있다. 현재 블록에 대한 움직임 정보는 상기 현재 블록의 주변 블록을 기반으로 도출될 수 있다. 여기서, 상기 쌍예측 움직임 정보는 L0 참조 픽처 인덱스 및 L0 움직임 벡터(L0 움직임 정보), L1 참조 픽처 인덱스 및 L1 움직임 벡터(L1 움직임 정보)를 포함할 수 있고, 상기 단예측 움직임 정보는 L0 참조 픽처 인덱스 및 L0 움직임 벡터(L0 움직임 정보)를 포함할 수 있고, 또는 L1 참조 픽처 인덱스 및 L1 움직임 벡터(L1 움직임 정보)를 포함할 수 있다. 상기 L0은 참조 픽처 리스트 L0(List 0)를 나타내고, 상기 L1은 참조 픽처 리스트 L1(List 1)를 나타낸다. 상기 L0 움직임 정보를 기반으로 수행되는 인터 예측은 LO 예측이라고 불릴 수 있고, 상기 L1 움직임 정보를 기반으로 수행되는 인터 예측은 L1 예측이라고 불릴 수 있으며, 상기 L0 움직임 정보 및 L1움직임 정보, 즉, 쌍예측 움직임 정보를 기반으로 수행되는 인터 예측은 쌍예측(bi-prediction)이라고 불릴 수 있다. 한편, L0 예측 및 L1 예측 각각에 대하여 별도의 움직임 벡터가 사용될 수 있다. 즉, 예를 들어, 현재 블록에 대한 L0 예측을 위한 상기 L0 움직임 벡터(Motion Vector L0, MVL0)와 L1 예측을 위한 상기 L1 움직임 벡터(motion Vector L1, MVL1)이 별도로 도출될 수 있다. 이 경우 예를 들어, 상기 MVL0가 L0 내의 L0 참조 픽처 내의 제1 참조 영역을 가리키고, 상기 MVL1이 L1 내의 L1 참조 픽처 내의 제2 참조 영역을 가리키는 경우, 상기 제1 참조 영역의 복원 샘플로부터 획득한 제1 프리딕터(predictor)와 상기 제2 참조 영역의 복원 샘플로부터 획득한 제2 프리딕터의 가중 합(weighted sum)을 통하여 상기 현재 블록의 예측 샘플을 도출할 수 있다. 여기서 상기 가중 합은 상기 현재 픽처와 상기 제1 참조 픽처 간의 제1 시간 거리 및 상기 현재 픽처와 상기 제2 참조 픽처 간의 제2 시간 거리를 기반으로 수행될 수 있다. 여기서 시간 거리라 함은 POC(Picture order count) 차이를 나타낼 수 있다. 즉, 상기 현재 픽처의 POC 값과 상기 L0 참조 픽처의 POC 값의 차이가 상기 제1 시간 거리가 될 수 있고, 상기 현재 픽처의 POC 값과 상기 L1 참조 픽처의 POC 값의 차이가 상기 제2 시간 거리가 될 수 있다.
한편, 본 발명에 따르면 상기와 같은 쌍예측이 적용되는 경우 상기 현재 블록에 대한 MVL0 및 MVL1과 제1 프리딕터 및 제2 프리딕터를 기반으로 샘플 단위 움직임 벡터 또는 블록 단위 움직임 벡터를 구할 수 있고, 이를 통하여 보다 향상된 예측 성능의 예측 샘플을 도출할 수도 있다. 이는 BIO(Bi-prediction Optical flow) 예측이라 불릴 수 있으며, 상기 예측 샘플을 기존의 예측 샘플과 구분하여 리파인(refine) 예측 샘플 또는 BIO 예측 샘플이라 불릴 수 있다. 또한, 상기 샘플 단위 움직임 벡터 또는 상기 블록 단위 움직임 벡터는 리파인 움직임 벡터 또는 BIO 움직임 벡터라고 불릴 수 있다. 상기 블록 단위 움직임 벡터가 도출되는 경우, 상기 블록 단위 움직임 벡터가 도출되는 대상 블록의 사이즈는 BwxBh 로 기설정될 수 있다. 예를 들어, 상기 대상 블록의 사이즈는 4x4 로 기설정될 수 있다. 이 경우, 상기 현재 블록에 포함된 4x4 사이즈의 대상 블록들에 대한 상기 리파인 움직임 벡터들이 도출될 수 있다. 한편, 상기 현재 블록의 상기 대상 블록은 상기 현재 블록의 서브 블록이라고 나타낼 수도 있다.
상기 리파인 움직임 벡터 및 리파인 예측 샘플을 예를 들어 다음과 같은 방법을 통하여 도출될 수 있다.
BCC(Brightness Constancy Constraint), 즉 연속된 프레임에서 물체(object)의 샘플(픽셀) 값 변화가 없다고 가정하면, OF(optical flow)에 따른 물체의 움직임은 다음 식과 같이 표현될 수 있다.
여기서, I(x,y,t)는 (x,y) 샘플 포지션과 t 시간에서의 샘플 값을 나타내고, 는 변화량을 나타낸다. 작은 움직임을 가정한다면 상기 수학식 1의 오른쪽 항은 테일러 수열(taylor series)의 1차 수식으로 다음과 같이 나타내어질 수 있다.
여기서 수학식 2를 t로 나누고 정리하면 다음과 같이 나타내어질 수 있다.
여기서, Vx=Δx/Δt이고, Vy는 Δy/Δt이다.
상기 수학식은 두개의 미지수(움직임 및 신호의 공간적 도함수(spatial derivative))를 포함하고 있다. 따라서 움직임 분석을 위해 공간적 도함수가 필요하다.
본 발명에 따르면, OF(optical flow) 특성을 이용하여, 추가적인 움직임 벡터의 전송 없이 샘플(픽셀) 단위 또는 특정 블록 단위로 리파인된 움직임 벡터와 참조 샘플 값을 획득할 수 있다. 예를 들어, BCC에 추가로 물체가 짧은 시간동안 일정한 속도로 움직인다고 가정하면, MVL0 및 MVL1은 크기가 동일한 대칭 값으로 표현될 수 있다. 다시 말해, MVL0와 MVL1의 x성분들의 크기는 동일하고 부호는 서로 다를 수 있고, 상기 MVL0와 상기 MVL1의 y성분들의 크기는 동일하고 부호는 서로 다를 수 있다. 예를 들어, 상기 MVL0의 x성분, 및 y성분이 각각 Vx, 및 Vy 인 경우, 상기 MVL1의 x성분, 및 y성분은 각각 -Vx, 및 -Vy 일 수 있다.
도 3은 BCC 및 물체가 짧은 시간동안 일정한 속도로 움직인다고 가정할 때의 쌍예측 움직임 벡터들을 예시적으로 나타낸다.
도 3을 참조하면, BCC 및 물체가 짧은 시간동안 일정한 속도로 움직인다고 가정하면, 현재 픽처(300) 내의 현재 블록에 대한 쌍예측에 있어, MVL0는 상기 현재 블록과 대응하는 제1 참조 픽처(Reference 0, 310) 내의 제1 참조 블록을 가리키는 움직임 벡터를 나타내고, MVL1는 상기 현재 블록과 대응하는 제2 참조 픽처(Reference 1, 320) 내의 제2 참조 블록을 가리키는 움직임 벡터를 나타낸다. 상기 제1 참조 픽처는 상기 L0에 포함된 참조 픽처들 중 하나일 수 있고, 상기 제2 참조 픽처는 상기 L1에 포함된 참조 픽처들 중 하나일 수 있다. 이 경우 각 블록들의 대표 위치는 각 블록의 좌상단 샘플 포지션(top-left sample position)이 될 수 있다. 이 경우 상기 MVL0와 상기 MVL1은 서로 대칭 값으로 표현될 수 있다.
도 3에서 현재 블록 내 대상 샘플(301)을 기준으로, MVL0에 따른 위치(311)의 제1 참조 샘플값 및 MVL1에 따른 위치(321)의 제2 참조 샘플값을 도출할 수 있다. 여기서 상기 제1 참조 샘플값은 제1 프리딕터(predictor) 또는 L0 프리딕터라고 불릴 수 있고, 상기 제2 참조 샘플값은 제2 프리딕터 또는 L1 프리딕터라고 불릴 수 있다. 상기 제1 참조 샘플값 및 상기 제2 참조 샘플값의 차이는 다음 수학식과 같이 정리할 수 있다.
여기서  은 제1 참조 픽처(Reference 0, 310)의 샘플 포지션 311에서의 샘플값(즉, 제1 참조 샘플값)을 나타내고,
은 제1 참조 픽처(Reference 0, 310)의 샘플 포지션 311에서의 샘플값(즉, 제1 참조 샘플값)을 나타내고,  는 제2 참조 픽처(Reference 1, 320)의 샘플 포지션 321에서의 샘플값(즉, 제2 참조 샘플값)을 나타낸다. 상기 샘플값들은 다음 수학식에 의하여 나타내어질 수 있다.
는 제2 참조 픽처(Reference 1, 320)의 샘플 포지션 321에서의 샘플값(즉, 제2 참조 샘플값)을 나타낸다. 상기 샘플값들은 다음 수학식에 의하여 나타내어질 수 있다.

그리고, 상기 수학식 5를 상기 수학식 4에 대입하여 정리하면 다음 수학식 6과 같이 나타낼 수 있다.
여기서, I(0)[i,j]는 L0 참조 샘플 값, I(1)[i,j]는 L1 참조 샘플 값 Ix (k)[i, j], Iy (k)[i, j]는 각각 x축, y축 변화량, 즉 그래디언트(gradient)를 나타낸다. 구체적으로  및
및  는 각각 L0 내의 제1 참조 픽처(Reference 0, 310)의 [i,j] 위치에서의 x축, y축 편미분값이고,
는 각각 L0 내의 제1 참조 픽처(Reference 0, 310)의 [i,j] 위치에서의 x축, y축 편미분값이고,  및
및  는 각각 L1 내의 제2 참조 픽처(Reference 1, 320)의 [i,j] 위치에서의 x축, y축 편미분값이다. 상기 편미분값은 그래디언트라고 불릴 수 있다.
는 각각 L1 내의 제2 참조 픽처(Reference 1, 320)의 [i,j] 위치에서의 x축, y축 편미분값이다. 상기 편미분값은 그래디언트라고 불릴 수 있다.
한편, 정확도 및 예측 효율을 높이기 위하여, 상기 그래디언트들은 보간 필터(interpolation filter)를 기반으로 다음 수학식 7과 같이 나타낼 수 있다. 한편, 상기 보간 필터의 필터 계수가 할당되는 위치 및/또는 단위는 필터 탭이라 할 수 있다. 상기 보간 필터의 필터 계수는 1/4 분수(fractional) 샘플 단위로 할당될 수 있다.

여기서, 2M은 상기 보간 필터의 필터 탭(filter tap)의 수,  ,
,  는 각각 움직임 벡터의 x성분, y성분의 소수부,
는 각각 움직임 벡터의 x성분, y성분의 소수부,  ,
,  는 각각
는 각각  ,
,  에 대한 n번째 필터 탭의 필터 계수,
에 대한 n번째 필터 탭의 필터 계수,  는 쌍예측 이후의 [i+n, j] 위치에서의 복원 샘플 값, 즉 참조 픽처의 [i+n,j] 위치에서의 참조 샘플 값을 나타낸다. 상기 움직임 벡터의 x성분 및/또는 y성분의 소수부의 값은 0, 1/4, 2/4, 및 3/4 중 하나일 수 있다.
는 쌍예측 이후의 [i+n, j] 위치에서의 복원 샘플 값, 즉 참조 픽처의 [i+n,j] 위치에서의 참조 샘플 값을 나타낸다. 상기 움직임 벡터의 x성분 및/또는 y성분의 소수부의 값은 0, 1/4, 2/4, 및 3/4 중 하나일 수 있다.
구체적으로  ,
,  는 각각 MVL0의 x성분, y성분의 소수부,
는 각각 MVL0의 x성분, y성분의 소수부,  ,
,  는 각각
는 각각  ,
,  에서의 n번째 필터 탭의 필터 계수,
에서의 n번째 필터 탭의 필터 계수,  는 제1 참조 픽처(Reference 0, 310)의 [i+n,j] 위치에서의 참조 샘플 값을 나타낸다. 또한,
는 제1 참조 픽처(Reference 0, 310)의 [i+n,j] 위치에서의 참조 샘플 값을 나타낸다. 또한,  ,
,  는 각각 MVL1의 x성분, y성분의 소수부,
는 각각 MVL1의 x성분, y성분의 소수부,  ,
,  는 각각
는 각각  ,
,  에서의 n번째 필터 탭의 필터 계수,
에서의 n번째 필터 탭의 필터 계수,  는 제2 참조 픽처(Reference 1, 320)의 [i+n,j] 위치에서의 참조 샘플 값을 나타낸다.
는 제2 참조 픽처(Reference 1, 320)의 [i+n,j] 위치에서의 참조 샘플 값을 나타낸다.
일 예로, 상기 필터 탭의 수가 6인 경우(즉, 2M은 6인 경우), 상기 움직임 벡터의 x 성분, y성분의 소수부에 대한 보간 필터의 필터 탭 계수는 다음의 표와 같이 정의될 수 있다.

상기 수학식 6을 기반으로  가 최소값을 갖게 하는 샘플 단위 움직임 벡터 vx[i,j], vy[i,j]를 계산할 수 있다. 예를 들어, [i,j]를 중심으로 하는 특정 영역, 윈도우 Ω(window Ω) 내의 샘플들이 국지적으로 변함없는 움직임(locally steady motion)을 갖는다고 가정할 수 있다. 여기서 윈도우 Ω는 (2M+1)×(2M+1) 샘플들을 포함할 수 있다. 이 경우, 윈도우 Ω 내의 샘플 위치는 [i’,j’]로 나타낼 수 있다. 이 때, [i’,j’]에서 i-M≤i’≤i+M, j-M≤j’≤j+M을 만족한다. 이를 기반으로
가 최소값을 갖게 하는 샘플 단위 움직임 벡터 vx[i,j], vy[i,j]를 계산할 수 있다. 예를 들어, [i,j]를 중심으로 하는 특정 영역, 윈도우 Ω(window Ω) 내의 샘플들이 국지적으로 변함없는 움직임(locally steady motion)을 갖는다고 가정할 수 있다. 여기서 윈도우 Ω는 (2M+1)×(2M+1) 샘플들을 포함할 수 있다. 이 경우, 윈도우 Ω 내의 샘플 위치는 [i’,j’]로 나타낼 수 있다. 이 때, [i’,j’]에서 i-M≤i’≤i+M, j-M≤j’≤j+M을 만족한다. 이를 기반으로  을 최소화하는 움직임 벡터를 계산할 수 있다. 이 경우 윈도우 Ω 내의 샘플들이 국지적으로 변함없는 움직임을 갖는다는 가정을 고려하면 상기
을 최소화하는 움직임 벡터를 계산할 수 있다. 이 경우 윈도우 Ω 내의 샘플들이 국지적으로 변함없는 움직임을 갖는다는 가정을 고려하면 상기  는 다음 수학식과 같이 나타내어질 수 있다.
는 다음 수학식과 같이 나타내어질 수 있다.

여기서,  ,
,  ,
,  이다. 여기서 P(0)[i’,j’] 및 P(1)[i’,j’]는 각각 L0 프리딕터 및 L1 프리딕터를 나타낸다. 상기 P(0)[i’,j’] 및 상기 P(1)[i’,j’]는 각각 I0[i’,j’] 및 I1[i’,j’] 에 대응한다.
이다. 여기서 P(0)[i’,j’] 및 P(1)[i’,j’]는 각각 L0 프리딕터 및 L1 프리딕터를 나타낸다. 상기 P(0)[i’,j’] 및 상기 P(1)[i’,j’]는 각각 I0[i’,j’] 및 I1[i’,j’] 에 대응한다.
상기 수학식 7을 Vx, Vy 각각으로 편미분하여 정리하면 다음과 같다.

여기서,  ,
,  ,
,  ,
,  ,
,  이라고 하고, 상기 s1, s2, s3, 및 s4를 상기 수학식 9에 대입하여 정리하면 다음 수학식 10 및 수학식 11과 같이 나타낼 수 있다.
이라고 하고, 상기 s1, s2, s3, 및 s4를 상기 수학식 9에 대입하여 정리하면 다음 수학식 10 및 수학식 11과 같이 나타낼 수 있다.


상기 수학식 10 및 수학식 11을 기반으로 Vx, Vy을 정리하면 각각 다음과 같다.

즉, Vx, Vy는 각각 다음과 같이 정리될 수 있다.
따라서, 상기 Vx 및 Vy를 이용하여 대상 샘플에 대한 리파인된 프리딕터, 즉, 리파인 예측 샘플을 다음과 같이 계산할 수 있다.
상기와 같은 방법을 기반으로 샘플 단위의 리파인 움직임 벡터 및 리파인 예측 샘플을 구할 수 있다. 여기서 P는 상기 대상 샘플에 대한 리파인 예측 샘플을 나타내고, Vx, Vy는 상기 대상 샘플에 대한 리파인 움직임 벡터의 x성분, y성분을 각각 나타낸다.
한편, 상술한 방법은 동일한 크기를 갖고 대칭되는 두 개의 움직임 벡터들(즉, MVL0 및 MVL1)을 일정한 움직임(constant motion)으로 가정한 방법이다. 다시 말해, 상술한 리파인 예측 샘플 도출 방법은 현재 픽처와 상기 MVL0와 연관된 제1 참조 픽처 간의 제1 시간 거리와 상기 현재 픽처와 상기 MVL1와 연관된 제2 참조 픽처 간의 제2 시간 거리가 동일한 경우를 가정한 방법일 수 있다. 상기 현재 픽처의 POC 값과 상기 제1 참조 픽처의 POC 값의 차이가 상기 제1 시간 거리가 될 수 있고, 상기 제2 참조 픽처의 POC 값과 상기 제2 참조 픽처의 POC 값과의 차이가 상기 제2 시간 거리가 될 수 있다.
상기 제1 시간 거리와 상기 제2 시간 거리가 동일하지 않은 경우의 일정한 움직임을 갖는 상기 두 개의 움직임 벡터들을 고려하여 상기 리파인 예측 샘플을 도출하는 방법은 후술하는 바와 같을 수 있다.
예를 들어, 상기 제1 시간 거리와 상기 제2 시간 거리를 다른 값을 갖는 것을 반영하여 상술한 수학식 14를 다시 계산하면 다음과 같이 나타낼 수 있다.
여기서 P는 상기 대상 샘플을 위한 리파인된 프리딕터 P(0), P(1)는 각각 상기 현재 샘플에 대한 제1 프리딕터, 제2 프리딕터, Ix (0), Iy (0) 는 각각 상기 제1 프리딕터에서의 x축, y축 그래디언트, Ix (1), Iy (1) 는 각각 상기 제2 프리딕터에서의 x축, y축 그래디언트, Vx, Vy는 각각 상기 대상 샘플에 대한 리파인 움직임 벡터의 x성분, y성분, τ0는 상기 제1 시간 거리, τ1는 상기 제2 시간 거리를 나타낸다. 상기 제1 시간 거리 및 상기 제2 시간 거리는 상기 현재 픽처(또는 현재 프레임)와 참조 픽처(또는 참조 프레임)와의 거리를 나타낼 수 있다.
상기 제1 시간 거리 및 상기 제2 시간 거리는 다음과 같은 수학식을 기반으로 도출될 수 있다.
여기서, POC(current)는 상기 현재 픽처의 POC(picture order count) 값, POC(Ref0)는 상기 제1 참조 픽처의 POC 값, POC(Ref1)는 상기 제2 참조 픽처의 POC 값을 나타낸다.
한편, 상기 리파인 예측 샘플을 도출하는 방법에서 연산 복잡도를 줄이기 위하여 상기 수학식 13을 근사화하여 사용할 수 있다. 상기 수학식 13을 근사화한 식은 다음과 같이 유도될 수 있다.
상기 수학식 13의 Vx의 분자 및 분모에 s5를 나누어 다음의 수학식을 도출할 수 있다.

상기 수학식 17의 s5의 값이 충분히 큰 값인 경우, 상기 수학식 17의 분모의 s2*s6/s5 및 분자의 s2*s4/s5는 0으로 근사화될 수 있다. 따라서, 상기 수학식 17은 다음과 같은 수학식으로 나타낼 수 있다.

상기 수학식 18을 통하여 도출된 Vx를 상기 수학식 11의 Vy 에 대입하는 경우, Vy는 다음과 같은 수학식을 기반으로 도출될 수 있다.

상기 수학식 19를 기반으로 Vy를 정리하면 다음과 같다.

상기 수학식 18 및 수학식 20을 기반으로 상기 Vx 및 Vy 를 도출하기 위한 연산 복잡도들 낮출 수 있고, 이를 통하여 리파인 예측 샘플을 도출하는 방법의 전체적인 연산 복잡도를 낮출 수 있다.
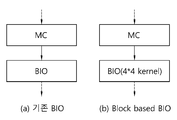
한편, 상술한 내용과 같이 샘플 단위의 리파인 움직임 벡터를 도출하는 BIO 예측이 적용될 수도 있지만, 블록 단위의 리파인 움직임 벡터를 도출하는 BIO 예측이 제안될 수 있다. 블록 단위로 리파인먼트를 수행하는 BIO 예측은 샘플 단위로 리파인먼트를 수행하는 BIO 예측에 비하여 계산 복잡도를 줄일 수 있다.
예를 들어, 상기 리파인먼트가 수행되는 대상 블록의 폭 Bw와 높이 Bh가 각각 동일하게 4로 기설정된 경우, 4x4 사이즈의 블록 단위로 프리딕터가 리파인먼트될 수 있다. 샘플 단위로 리파인먼트를 수행하는 BIO 예측에서는 상술한 내용과 같이 각 샘플별로 그래디언트 맵(gradient map)이 생성될 수 있고, 각 샘플에 대한 오프셋(offset)이 도출되고, 상기 수학식 14을 기반으로 각 샘플에 대한 프리딕터에 상기 오프셋을 더하여 상기 리파인 예측 샘플이 도출될 수 있다. 하지만, 블록 단위로 리파인먼트를 수행하는 BIO 예측(블록 기반 BIO(block based BIO) 예측이라고 나타낼 수도 있다) 에서는 4x4 사이즈인 대상 블록에서의 오프셋이 도출될 수 있고, 상기 대상 블록에 포함된 대상 샘플들의 프리딕터들에 동일한 오프셋이 가산될 수 있다. 즉, 상기 대상 블록에 동일한 리파인 움직임 벡터가 적용될 수 있다.
도 4는 샘플 기반 BIO 예측과 블록 기반 BIO 예측이 수행되는 일 예를 나타낸다. 도 4를 참조하면 상기 리파인먼트가 수행되는 대상 블록의 사이즈가 BwХBh (예를 들어, 4x4)로 기설정된 경우, 인코딩/디코딩 과정을 통하여 도출된 MVL0 및 MVL1을 기준으로 wХh 크기의 대상 블록의 참조 샘플값의 x축, y축, 시간축 그래디언트 맵(gradient map)이 도출될 수 있다. 이 후, 상기 대상 블록에 대한 그래디언트 맵을 기반으로 상기 대상 블록에 포함된 대상 샘플에 대한 오프셋이 도출될 수 있다. BwxBh 커널(kernel)을 기반으로 상기 대상 블록 단위의 오프셋이 도출될 수 있고, 대상 샘플에 대한 프리딕터에 상기 오프셋을 더하여 상기 대상 샘플에 대한 리파인 예측 샘플이 도출될 수 있다.
구체적으로, 현재 블록의 대상 블록에 포함된 대상 샘플들의 그래디언트들(즉, 대상 블록의 그래디언트 맵)을 기반으로 상기 블록 단위 리파인 움직임 벡터가 도출될 수 있다. 상기 블록 단위 리파인 움직임 벡터는 상기 현재 블록의 대상 블록 단위로 도출될 수 있고, 상기 블록 단위 리파인 움직임 벡터는 상기 현재 블록의 대상 블록에 대한 리파인 움직임 벡터라고 나타낼 수 있다. 예를 들어, 상기 현재 블록의 대상 블록에 포함된 대상 샘플들의 sn 의 합이 상기 대상 블록의 sn 으로 도출될 수 있다. 상기 대상 블록에 대한 sn 은 sn,bk 라고 나타낼 수 있다. 예를 들어, 상기 대상 블록에 대한 s1,bk s2,bk s3,bk, s4,bk s5,bk s6,bk 는 다음의 수학식과 같이 도출될 수 있다.
여기서,  ,
,  ,
,  일 수 있다.
일 수 있다.
이 후, 상술한 수학식 13 또는 수학식 18 및 수학식 20에 sn 대신 (sn,bk>>n) 을 삽입한 수학식을 기반으로 상기 대상 블록에 대한 리파인 움직임 벡터가 도출될 수 있다. 예를 들어, 상기 블록 단위 움직임 벡터가 도출되는 대상 블록의 사이즈가 4x4 인 경우, 상술한 수학식 13에 sn 대신 (sn,bk>>16) 을 삽입한 수학식을 기반으로 상기 대상 블록에 대한 리파인 움직임 벡터가 도출될 수 있다. 상기 대상 블록의 사이즈가 4x4 인 경우, 상기 블록 단위 리파인 움직임 벡터는 다음의 수학식을 기반으로 도출될 수 있다.

또는 근사화된 수학식을 기반으로 상기 블록 단위 리파인 움직임 벡터가 도출될 수도 있다. 즉, 상술한 수학식 18 및 수학식 20에 sn 대신 (sn,bk>>n) 을 삽입한 수학식을 기반으로 상기 대상 블록에 대한 리파인 움직임 벡터가 도출될 수 있다. 상기 대상 블록의 사이즈가 4x4 인 경우, 상기 블록 단위 리파인 움직임 벡터는 다음의 수학식을 기반으로 도출될 수 있다.
이 후, 상술한 수학식 14의 Vx 를 Vx,bk 로 대체하고, Vy 를 Vy,bk 로 대체하여 상기 대상 샘플에 대한 리파인 예측 샘플이 도출될 수 있다.
한편, 본 발명에서는 현재 블록에 대한 특정 조건을 기반으로 상기 BIO 예측을 적응적으로 적용하는 방안을 제안한다. 이를 통하여 상기 BIO 예측, 특히, 블록 기반 BIO 예측을 적용하는 인터 예측을 최적화하여 코딩 효율을 향상시킬 수 있다.
일 예로, 현재 블록의 사이즈를 기반으로 상술한 BIO 예측의 적용 여부가 결정될 수 있다. 예를 들어, 상기 현재 블록의 사이즈가 WxH 인 경우, 상기 현재 블록의 사이즈와 기설정된 임계값을 기반으로 상기 예측의 적용 여부가 결정될 수 있다.
예를 들어, 상기 현재 블록의 폭과 폭에 대한 임계값이 동일하고, 상기 현재 블록의 높이와 높이에 대한 임계값이 동일한 경우, 상기 현재 블록에 대하여 상기 BIO 예측이 적용되지 않는 것으로 결정될 수 있다. 또는, 상기 현재 블록의 사이즈 WxH 가 기설정된 최소 사이즈 NxM 보다 작은 경우, 상기 현재 블록에 대하여 상기 BIO 예측이 적용되지 않는 것으로 결정될 수 있다. 또는, 상기 현재 블록의 샘플수가 기설정된 임계값보다 작은 경우, 상기 현재 블록에 대하여 상기 BIO 예측이 적용되지 않는 것으로 결정될 수 있다.
구체적으로, 예를 들어, 상기 현재 블록의 사이즈 가 4x4 인 경우, 상기 BIO 예측은 상기 현재 블록에 대하여 적용되지 않을 수 있다.
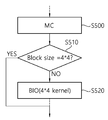
도 5는 현재 블록의 사이즈를 기반으로 상기 BIO 예측의 적용 여부를 결정하는 일 예를 나타낸다.
인코딩 장치/디코딩 장치는 상기 현재 블록에 대한 움직임 벡터를 도출할 수 있다(S500). 상기 움직임 벡터는 MVL0 및 MVL1을 포함할 수 있다.
인코딩 장치/디코딩 장치는 상기 현재 블록의 사이즈가 4x4 인지 판단할 수 있다(S510). 상기 현재 블록의 사이즈가 4x4 인 경우, 상기 현재 블록에 대한 상기 BIO 예측은 수행되지 않을 수 있다. 이 경우, 상기 도출된 상기 움직임 벡터를 기반으로 상기 현재 블록에 대한 인터 예측이 수행될 수 있다.
상기 현재 블록의 사이즈가 4x4 가 아닌 경우, 인코딩 장치/디코딩 장치는 상기 현재 블록에 대한 블록 기반 BIO 예측을 수행할 수 있다(S520). 이 경우, 상기 블록 단위 움직임 벡터가 도출되는 대상 블록의 사이즈는 4x4 일 수 있다. 즉, 상기 인코딩 장치/디코딩 장치는 상기 현재 블록에 포함된 4x4 사이즈의 대상 블록에 대한 리파인 움직임 벡터를 도출할 수 있고, 상기 리파인 움직임 벡터를 기반으로 상기 현재 블록의 상기 대상 블록에 포함된 대상 샘플에 대한 리파인 예측 샘플을 도출할 수 있다.
한편, 상기 현재 블록의 움직임 정보를 도출하는 과정에서 FRUC(Frame Rate Up-Conversion) 가 적용될 수 있고, 상기 FRUC 를 통하여 도출된 움직임 정보를 기반으로 상술한 BIO 예측이 수행될 수도 있다. 상기 FRUC 은 PMMVD(Pattern Matched Motion Vector Derivation) 라고 불릴 수도 있다. 상기 FRUC 은 영상 내에서 객체가 일정한 속도로 움직이며, 이 때 픽셀값(샘플값)에 변화가 없음을 가정하고, TM(template matching) 방법 또는 BM(bilateral matching) 방법을 통하여 움직임 정보를 도출하는 방안을 나타낼 수 잇다. 구체적으로 다음과 같이 설명될 수 있다.
도 6은 상기 BM 방법을 통한 움직임 정보를 도출하는 일 예를 예시적으로 나타낸다. 상기 현재 블록에 상기 FRUC 이 적용된 경우, 상기 현재 블록에 대한 MVL0 및 MVL1을 순차적으로 하나씩 고른 후, 상기 현재 블록이 속한 픽처를 중심으로 보간(interpolation)하여 상기 L0 방향 및 L1 방향 중 상기 움직임 벡터들과 연관된 방향과 다른 방향의 상기 움직임 벡터들에 대응되는 움직임 벡터들을 도출할 수 있다.
구체적으로, 인코딩 장치/디코딩 장치는 상기 현재 블록의 주변 블록들을 기반으로 상기 현재 블록의 움직임 정보 후보 리스트를 도출할 수 있다. 상기 주변 블록의 움직임 벡터 후보는 쌍예측 움직임 벡터 후보 또는 단예측 움직임 벡터 후보일 수 있다. 인코딩 장치/디코딩 장치는 상기 움직임 벡터 후보에 포함된 움직임 벡터들을 L0 방향과 L1 방향으로 나눠 구분할 수 있다. 즉, 인코딩 장치/디코딩 장치는 상기 움직임 벡터 후보에 움직임 벡터들을 MVL0 와 MVL1로 구분할 수 있다.
이 후, 상기 구분된 움직임 벡터들을 순차적으로 하나씩 고른 후, 상기 현재 블록이 속한 픽처를 중심으로 보간(interpolation)하여 상기 L0 방향 및 L1 방향 중 상기 움직임 벡터들과 연관된 방향과 다른 방향의 상기 움직임 벡터들에 대응되는 움직임 벡터들을 도출할 수 있다.
예를 들어, 상기 현재 블록의 움직임 벡터 후보가 MVL0인 경우, 상기 MVL0에 대한 L0 참조 픽처와 상기 현재 블록을 포함하는 현재 픽처 사이의 시간적 거리(Temporal distance)와 L1 참조 픽처와 상기 현재 픽처 사이의 시간적 거리를 기반으로 스케일링하여 상기 MVL0와 대응되는 MVL1을 도출할 수 있다. 다시 말해, 상기 MVL0에 대한 L0 참조 픽처와 상기 현재 픽처와의 제1 시간적 거리 및 상기 L1 참조 픽처와 상기 현재 픽처와의 제2 시간적 거리를 기반으로 상기 MVL0 를 스케일링하여 상기 MVL1을 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 L0 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 L1 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있다. 또한, 상기 L1 참조 픽처는 상기 L1 에 포함된 L1 참조 픽처들 중에서 도출될 수 있다. 예를 들어, 상기 L1 참조 픽처는 상기 L1 에 포함된 L1 참조 픽처들 중 상기 MVL0 가 가리키는 참조 영역과 도출된 MVL1 이 가리키는 참조 영역과의 차분 값, 즉 레지듀얼이 가장 작은 참조 영역을 포함하는 참조 픽처로 도출될 수 있다. 상기 MVL0 가 가리키는 참조 영역과 도출된 MVL1 이 가리키는 참조 영역과의 차분 값은 상기 움직임 벡터 후보에 대한 코스트(cost)라고 나타낼 수 있다.
또한, 예를 들어, 상기 현재 블록의 움직임 벡터 후보가 MVL1인 경우, 상기 MVL1에 대한 L1 참조 픽처와 상기 현재 블록을 포함하는 현재 픽처 사이의 시간적 거리(Temporal distance)와 L0 참조 픽처와 상기 현재 픽처 사이의 시간적 거리를 기반으로 스케일링하여 상기 MVL1와 대응되는 MVL0을 도출할 수 있다. 다시 말해, 상기 MVL1에 대한 L1 참조 픽처와 상기 현재 픽처와의 제1 시간적 거리 및 상기 L0 참조 픽처와 상기 현재 픽처와의 제2 시간적 거리를 기반으로 상기 MVL1 를 스케일링하여 상기 MVL1을 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 L1 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 L0 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있다. 도 6에 도시된 TD0 은 상기 제1 시간적 거리를 나타내고, TD1 은 상기 제2 시간적 거리를 나타낸다. 또한, 상기 L0 참조 픽처는 상기 L0 에 포함된 L0 참조 픽처들 중에서 도출될 수 있다. 예를 들어, 상기 L0 참조 픽처는 상기 L0 에 포함된 L0 참조 픽처들 중 상기 MVL1 가 가리키는 참조 영역과 도출된 MVL0 이 가리키는 참조 영역과의 차분 값, 즉 레지듀얼이 가장 작은 참조 영역을 포함하는 참조 픽처로 도출될 수 있다. 상기 MVL1 가 가리키는 참조 영역과 도출된 MVL0 이 가리키는 참조 영역과의 차분 값은 코스트(cost)라고 나타낼 수 있다.
인코딩 장치/디코딩 장치는 상기 움직임 벡터 후보에 대한 코스트들을 도출할 수 있고, 상기 코스트가 가장 작은 움직임 벡터 후보(MVL0 및 MVL1을 포함하는 쌍예측 움직임 정보)를 상기 현재 블록의 움직임 정보로 도출할 수 있다.
한편, 상기 현재 블록에 상기 FRUC 이 적용된 경우, 상기 TM 방법을 통하여 상기 현재 블록의 움직임 정보가 도출될 수도 있다.
도 7은 상기 TM 방법을 통한 움직임 정보를 도출하는 일 예를 예시적으로 나타낸다. 도 7을 참조하면 L0 참조 픽처에 포함된 L0 참조 블록들 중 상기 현재 블록의 템플릿(template)과 가장 유사한 템플릿에 대한 참조 블록이 상기 현재 블록에 대한 L0 참조 블록으로 도출될 수 있고, 상기 L0 참조 블록을 가리키는 움직임 벡터가 상기 현재 블록에 대한 MVL0 로 도출될 수 있다. 다시 말해, L0 참조 픽처에 포함된 참조 블록들 상기 현재 블록의 템플릿과의 코스트가 가장 작은 템플릿에 대한 참조 블록이 상기 현재 블록에 대한 L0 참조 블록으로 도출될 수 있고, 상기 L0 참조 블록을 가리키는 움직임 벡터가 상기 현재 블록에 대한 MVL0 로 도출될 수 있다.
상기 현재 블록의 상기 템플릿은 상기 현재 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있고, 상기 L0 참조 블록의 상기 템플릿은 상기 현재 블록의 템플릿과 대응하는 영역일 수 있고, 상기 참조 블록의 상기 템플릿은 상기 참조 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있다. 상기 참조 블록에 대한 코스트는 상기 현재 블록의 템플릿과 상기 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference)로 도출될 수 있다.
상기 코스트는 다음과 같은 수학식을 기반으로 도출될 수 있다.

여기서, i, j는 블록의 템플릿 내 샘플의 위치 (i, j)를 나타내고, Costdistortion은 상기 코스트, Tempref는 참조 블록의 템플릿의 샘플값, Tempcur는 상기 현재 블록의 템플릿의 샘플값을 나타낸다. 참조 블록의 템플릿 및 상기 현재 블록의 템플릿 사이의 대응하는 샘플들 간의 차이를 누적할 수 있고, 상기 차이의 누적은 상기 참조 블록에 대한 코스트로 사용될 수 있다. L0 참조 픽처에 포함된 L0 참조 블록들 중 가장 작은 코스트를 갖는 L0 참조 블록이 상기 현재 블록에 대한 L0 참조 블록으로 도출될 수 있고, 상기 L0 참조 블록을 가리키는 움직임 벡터가 상기 현재 블록에 대한 MVL0 로 도출될 수 있다. 상기 코스트는 상술한 내용과 같이 현재 블록의 템플릿과 L0 참조 블록의 템플릿을 기반으로 도출될 수 있다.
또한, 도 7을 참조하면 L1 참조 픽처에 포함된 L1 참조 블록들 중 상기 현재 블록의 템플릿(template)과 가장 유사한 템플릿에 대한 참조 블록이 상기 현재 블록에 대한 L1 참조 블록으로 도출될 수 있고, 상기 L1 참조 블록을 가리키는 움직임 벡터가 상기 현재 블록에 대한 MVL1 로 도출될 수 있다. 다시 말해, L1 참조 픽처에 포함된 참조 블록들 상기 현재 블록의 템플릿과의 코스트가 가장 작은 템플릿에 대한 참조 블록이 상기 현재 블록에 대한 L1 참조 블록으로 도출될 수 있고, 상기 L1 참조 블록을 가리키는 움직임 벡터가 상기 현재 블록에 대한 MVL1 로 도출될 수 있다.
상기 현재 블록의 상기 템플릿은 상기 현재 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있고, 상기 L1 참조 블록의 상기 템플릿은 상기 현재 블록의 템플릿과 대응하는 영역일 수 있고, 상기 참조 블록의 상기 템플릿은 상기 참조 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있다. 상기 참조 블록에 대한 코스트는 상기 현재 블록의 템플릿과 상기 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference)로 도출될 수 있다. L1 참조 픽처에 포함된 L1 참조 블록들 중 가장 작은 코스트를 갖는 L1 참조 블록이 상기 현재 블록에 대한 L1 참조 블록으로 도출될 수 있고, 상기 L1 참조 블록을 가리키는 움직임 벡터가 상기 현재 블록에 대한 MVL1 로 도출될 수 있다. 상기 코스트는 상술한 내용과 같이 현재 블록의 템플릿과 L1 참조 블록의 템플릿을 기반으로 도출될 수 있다.
한편, 디코딩 장치는 인코딩 장치로부터 최적의 움직임 벡터를 도출하기 위한 매칭 방법에 대한 정보를 획득할 수도 있고, 이 경우, 상기 매칭 방법에 따라 최적의 움직임 벡터를 도출할 수 있다. 예를 들어, 디코딩 장치는 상기 BM 방법 또는 TM 방법의 선택에 대한 플래그를 비트스트림을 통하여 획득할 수 있다. 상기 플래그는 BM/TM 선택 플래그라고 할 수도 있다. 디코딩 장치는 상기 플래그의 값을 기반으로 매칭 방법을 선택할 수 있다. 예를 들어, 상기 플래그의 값이 1인 경우, 디코딩 장치는 상기 BM 방법을 수행하여 상기 현재 블록의 움직임 정보를 도출할 수 있고, 또는 상기 플래그의 값이 0인 경우, 디코딩 장치는 상기 TM 방법을 수행하여 상기 현재 블록의 움직임 정보를 도출할 수 있다. 또는 상기 플래그의 값이 0인 경우, 디코딩 장치는 상기 BM 방법을 수행하여 상기 현재 블록의 움직임 정보를 도출할 수 있고, 또는 상기 플래그의 값이 1인 경우, 디코딩 장치는 상기 TM 방법을 수행하여 상기 현재 블록의 움직임 정보를 도출할 수 있다.
도 8a 내지 도 8b는 FRUC 를 기반으로 수행되는 인코딩 과정 및 디코딩 과정의 일 예를 나타낸다.
도 8a는 FRUC 를 기반으로 수행되는 인코딩 과정의 일 예를 나타낸다.
도 8a를 참조하면 인코딩 장치는 BM 모드를 적용하여 현재 블록에 대한 움직임 정보를 도출한다(S800). 한편, 상술한 BM 방법을 기반으로 움직임 정보를 도출하는 방안은 BM 모드라고 나타낼 수 있다.
예를 들어, 인코딩 장치는 상기 현재 블록의 주변 블록들을 기반으로 상기 현재 블록의 움직임 정보 후보 리스트를 도출할 수 있다. 상기 움직임 정보 후보 리스트에 포함된 후보는 L0 움직임 정보 또는 L1 움직임 정보를 포함할 수 있다.
이 후, 인코딩 장치는 BM 방법을 통하여 상기 움직임 정보 후보 리스트에 포함된 후보들에 대한 코스트들을 도출할 수 있고, 가장 작은 코스트를 갖는 후보를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출할 수 있다.
상기 움직임 정보 후보 리스트에 포함된 후보에 대한 코스트는 다음과 같이 도출될 수 있다. 인코딩 장치는 상기 후보의 움직임 벡터를 현재 픽처를 중심으로 보간(interpolation)하여 상기 L0 방향 및 L1 방향 중 상기 움직임 벡터와 연관된 방향과 다른 방향의 상기 움직임 벡터에 대응되는 움직임 벡터를 도출할 수 있고, 상기 후보의 움직임 벡터가 가리키는 참조 블록과 상기 도출된 움직임 벡터가 가리키는 참조 블록과의 SAD 를 상기 후보의 코스트로 도출할 수 있다.
예를 들어, 상기 움직임 후보가 L0 움직임 정보를 포함하는 경우, 인코딩 장치는 제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 움직임 후보에 대한 MVL0 를 스케일링하여 MVL1을 도출할 수 있다. 인코딩 장치는 상기 MVL0가 가리키는 L0 참조 블록과 상기 MVL1 이 가리키는 L1 참조 블록과의 SAD 를 상기 움직임 후보의 코스트로 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 움직임 후보에 대한 L0 참조 픽처의 POC 와 현재 픽처의 POC 의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 MVL1 에 대한 L1 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있다.
또한, 예를 들어, 상기 움직임 후보가 L1 움직임 정보를 포함하는 경우, 인코딩 장치는 제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 움직임 후보에 대한 MVL1 를 스케일링하여 MVL0을 도출할 수 있다. 인코딩 장치는 상기 MVL1이 가리키는 L1 참조 블록과 상기 MVL0 가 가리키는 L0 참조 블록과의 SAD 를 상기 움직임 후보의 코스트로 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 움직임 후보에 대한 L1 참조 픽처의 POC 와 현재 픽처의 POC 의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 MVL0 에 대한 L0 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있다.
인코딩 장치는 상기 후보들의 코스트들을 비교할 수 있고, 가장 작은 코스트를 갖는 후보의 움직임 정보(L0 움직임 정보 또는 L1 움직임 정보) 및 상기 후보를 기반으로 도출된 움직임 정보(L1 움직임 정보 또는 L0 움직임 정보)를 상기 현재 블록의 움직임 정보로 도출할 수 있다. 상기 도출된 움직임 정보는 상기 BM 모드를 기반으로 도출된 움직임 정보를 나타낼 수 있다.
인코딩 장치는 TM 모드를 적용하여 현재 블록에 대한 움직임 정보를 도출한다(S810). 한편, 상술한 TM 방법을 기반으로 움직임 정보를 도출하는 방안은 TM 모드라고 나타낼 수 있다.
인코딩 장치는 L0 참조 픽처에 포함된 L0 참조 블록들 상기 현재 블록의 템플릿과의 코스트가 가장 작은 템플릿에 대한 L0 참조 블록을 가리키는 움직임 벡터를 상기 현재 블록에 대한 MVL0 로 도출될 수 있다. 여기서, 상기 현재 블록의 상기 템플릿은 상기 현재 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있고, 상기 L0 참조 블록의 상기 템플릿은 상기 현재 블록의 템플릿과 대응하는 영역일 수 있고, 상기 L0 참조 블록의 상기 템플릿은 상기 L0 참조 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있다. 상기 L0 참조 블록에 대한 코스트는 상기 현재 블록의 템플릿과 상기 L0 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference)로 도출될 수 있다.
또한, 인코딩 장치는 L1 참조 픽처에 포함된 L1 참조 블록들 상기 현재 블록의 템플릿과의 코스트가 가장 작은 템플릿에 대한 L1 참조 블록을 가리키는 움직임 벡터를 상기 현재 블록에 대한 MVL1 로 도출될 수 있다. 여기서, 상기 현재 블록의 상기 템플릿은 상기 현재 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있고, 상기 L1 참조 블록의 상기 템플릿은 상기 현재 블록의 템플릿과 대응하는 영역일 수 있고, 상기 L1 참조 블록의 상기 템플릿은 상기 L1 참조 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있다. 상기 L1 참조 블록에 대한 코스트는 상기 현재 블록의 템플릿과 상기 L1 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference)로 도출될 수 있다.
인코딩 장치는 L0 움직임 정보와 L1 움직임 정보를 포함하는 움직임 정보를 상기 현재 블록의 움직임 정보로 도출할 수 있다. 상기 L0 움직임 정보는 상기 MVL0 및 상기 L0 참조 픽처를 가리키는 참조 픽처 인덱스를 포함할 수 있고, 상기 L1 움직임 정보는 상기 MVL1 및 상기 L1 참조 픽처를 가리키는 참조 픽처 인덱스를 포함할 수 있다.
인코딩 장치는 BM 모드를 기반으로 도출된 움직임 정보 및 TM 모드를 기반으로 도출된 움직임 정보에 대한 RD(rate distortion) 체크를 수행할 수 있고, 상기 BM 모드 및 상기 TM 모드 중 상기 현재 블록에 대한 최적의 모드를 선택할 수 있다(S820). 인코딩 장치는 BM 모드를 기반으로 도출된 움직임 정보 및 TM 모드를 기반으로 도출된 움직임 정보에 대한 RD 코스트를 기반으로 상기 BM 모드 및 상기 TM 모드 중 상기 현재 블록에 적용되는 모드를 선택할 수 있다. 한편, 인코딩 장치는 상기 선택된 모드를 나타내는 정보를 생성할 수 있다. 예를 들어, 인코딩 장치는 상기 BM 모드 및 상기 TM 모드 중 하나를 나타내는 플래그를 생성할 수 있고, 비트스트림을 통하여 상기 플래그를 시그널링할 수 있다.
도 8b는 FRUC 를 기반으로 수행되는 디코딩 과정의 일 예를 나타낸다.
도 8b를 참조하면 디코딩 장치는 상기 현재 블록에 BM 모드가 적용되는지 판단할 수 있다(S830). 디코딩 장치는 상기 현재 블록에 BM 모드 또는 TM 모드가 적용되는지 판단할 수 있다. 예를 들어, 디코딩 장치는 비트스트림을 통하여 상기 BM 모드 및 상기 TM 모드 중 하나를 나타내는 플래그를 획득할 수 있다. 디코딩 장치는 상기 BM 모드 및 상기 TM 모드 중 상기 플래그가 가리키는 모드를 상기 현재 블록에 적용되는 모드로 도출할 수 있다.
상기 현재 블록에 상기 BM 모드가 적용되는 경우, 디코딩 장치는 상기 BM 모드를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출한다(S840).
예를 들어, 디코딩 장치는 상기 현재 블록의 주변 블록들을 기반으로 상기 현재 블록의 움직임 정보 후보 리스트를 도출할 수 있다. 상기 움직임 정보 후보 리스트에 포함된 후보는 L0 움직임 정보 또는 L1 움직임 정보를 포함할 수 있다.
이 후, 디코딩 장치는 BM 방법을 통하여 상기 움직임 정보 후보 리스트에 포함된 후보들에 대한 코스트들을 도출할 수 있고, 가장 작은 코스트를 갖는 후보를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출할 수 있다.
상기 움직임 정보 후보 리스트에 포함된 후보에 대한 코스트는 다음과 같이 도출될 수 있다. 디코딩 장치는 상기 후보의 움직임 벡터를 현재 픽처를 중심으로 보간(interpolation)하여 상기 L0 방향 및 L1 방향 중 상기 움직임 벡터와 연관된 방향과 다른 방향의 상기 움직임 벡터에 대응되는 움직임 벡터를 도출할 수 있고, 상기 후보의 움직임 벡터가 가리키는 참조 블록과 상기 도출된 움직임 벡터가 가리키는 참조 블록과의 SAD 를 상기 후보의 코스트로 도출할 수 있다.
예를 들어, 상기 움직임 후보가 L0 움직임 정보를 포함하는 경우, 디코딩 장치는 제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 움직임 후보에 대한 MVL0 를 스케일링하여 MVL1을 도출할 수 있다. 디코딩 장치는 상기 MVL0가 가리키는 L0 참조 블록과 상기 MVL1 이 가리키는 L1 참조 블록과의 SAD 를 상기 움직임 후보의 코스트로 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 움직임 후보에 대한 L0 참조 픽처의 POC 와 현재 픽처의 POC 의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 MVL1 에 대한 L1 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있다.
또한, 예를 들어, 상기 움직임 후보가 L1 움직임 정보를 포함하는 경우, 디코딩 장치는 제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 움직임 후보에 대한 MVL1 를 스케일링하여 MVL0을 도출할 수 있다. 디코딩 장치는 상기 MVL1이 가리키는 L1 참조 블록과 상기 MVL0 가 가리키는 L0 참조 블록과의 SAD 를 상기 움직임 후보의 코스트로 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 움직임 후보에 대한 L1 참조 픽처의 POC 와 현재 픽처의 POC 의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 MVL0 에 대한 L0 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있다.
디코딩 장치는 상기 후보들의 코스트들을 비교할 수 있고, 가장 작은 코스트를 갖는 후보의 움직임 정보(L0 움직임 정보 또는 L1 움직임 정보) 및 상기 후보를 기반으로 도출된 움직임 정보(L1 움직임 정보 또는 L0 움직임 정보)를 상기 현재 블록의 움직임 정보로 도출할 수 있다.
한편, 상기 현재 블록에 상기 TM 모드가 적용되는 경우, 디코딩 장치는 상기 TM 모드를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출한다(S850).
디코딩 장치는 L0 참조 픽처에 포함된 L0 참조 블록들 상기 현재 블록의 템플릿과의 코스트가 가장 작은 템플릿에 대한 L0 참조 블록을 가리키는 움직임 벡터를 상기 현재 블록에 대한 MVL0 로 도출될 수 있다. 여기서, 상기 현재 블록의 상기 템플릿은 상기 현재 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있고, 상기 L0 참조 블록의 상기 템플릿은 상기 현재 블록의 템플릿과 대응하는 영역일 수 있고, 상기 L0 참조 블록의 상기 템플릿은 상기 L0 참조 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있다. 상기 L0 참조 블록에 대한 코스트는 상기 현재 블록의 템플릿과 상기 L0 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference)로 도출될 수 있다.
또한, 디코딩 장치는 L1 참조 픽처에 포함된 L1 참조 블록들 상기 현재 블록의 템플릿과의 코스트가 가장 작은 템플릿에 대한 L1 참조 블록을 가리키는 움직임 벡터를 상기 현재 블록에 대한 MVL1 로 도출될 수 있다. 여기서, 상기 현재 블록의 상기 템플릿은 상기 현재 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있고, 상기 L1 참조 블록의 상기 템플릿은 상기 현재 블록의 템플릿과 대응하는 영역일 수 있고, 상기 L1 참조 블록의 상기 템플릿은 상기 L1 참조 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있다. 상기 L1 참조 블록에 대한 코스트는 상기 현재 블록의 템플릿과 상기 L1 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference)로 도출될 수 있다.
디코딩 장치는 L0 움직임 정보와 L1 움직임 정보를 포함하는 움직임 정보를 상기 현재 블록의 움직임 정보로 도출할 수 있다. 상기 L0 움직임 정보는 상기 MVL0 및 상기 L0 참조 픽처를 가리키는 참조 픽처 인덱스를 포함할 수 있고, 상기 L1 움직임 정보는 상기 MVL1 및 상기 L1 참조 픽처를 가리키는 참조 픽처 인덱스를 포함할 수 있다.
한편, 상술한 내용과 같이 FRUC 을 통하여 상기 현재 블록의 움직임 정보가 도출되는 경우, 상기 현재 블록에 적용된 모드(BM 모드 또는 TM 모드)를 기반으로 상기 BIO 를 적응적으로 적용하는 것이 코딩 효율을 보다 향상시킬 수 있다. 구체적으로, FRUC 의 BM 모드와 상기 BIO 는 후술하는 가정 1 및 가정 2 를 고려한 예측 방안들이다.
- 가정 1. 짧은 시간동안 대상 물체(object)가 동일한 속도로 이동한다.
- 가정 2. 연속된 프레임(frame)들에서 대상 물체에 대한 샘플값은 변하지 않는다.
상기 BM 모드가 적용되는 경우, 상기 가정들을 고려하여 각 (서브) 블록의 움직임 벡터가 도출될 수 있고, 상기 BIO 가 적용되는 경우에도, 상기 가정들을 고려하여 각 (서브) 블록의 오프셋(각 (서브) 블록의 움직임 벡터를 기반으로 도출되는 값) 이 도출될 수 있다. 따라서, 동일한 가정들에 근거하여 수행되는 방법들을 중복적으로 적용하지 않는 것이 코딩 효율을 보다 향상시킬 수 있다. 이에, 상기 현재 블록에 FRUC 이 적용되는 경우, TM 모드를 기반으로 움직임 정보가 도출되면 상기 BIO 를 적용하고, BM 모드를 기반으로 움직임 정보가 도출되면 상기 BIO 를 적용하지 않는 방안이 제안될 수 있다.
도 9a 내지 도 9b는 FRUC 및/또는 BIO 가 적용된 현재 블록을 인코딩/디코딩하는 일 예를 나타낸다.
도 9a는 FRUC 및/또는 BIO 가 적용된 현재 블록을 인코딩하는 일 예를 나타낸다.
도 9a를 참조하면 인코딩 장치는 현재 블록에 FRUC 를 적용하여 상기 현재 블록의 움직임 정보를 도출할 수 있다(S900). 인코딩 장치는 상기 현재 블록에 대하여 BM 모드 및 TM 모드를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출할 수 있다. 상기 BM 모드를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출하는 구체적인 방안은 상술한 바와 같다. 또한, 상기 TM 모드를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출하는 구체적인 방안은 상술한 바와 같다.
인코딩 장치는 현재 블록에 대하여 TM 모드가 적용되는지 여부를 판단할 수 있다(S910). 인코딩 장치는 상기 BM 모드를 기반으로 도출된 움직임 정보와 상기 TM 모드를 기반으로 도출된 움직임 정보를 비교하여 상기 현재 블록에 적용되는 모드를 선택할 수 있다.
상기 현재 블록에 TM 모드가 적용된 경우, 인코딩 장치는 상기 현재 블록에 대한 움직임 정보를 기반으로 BIO 예측을 수행할 수 있다(S920). 인코딩 장치는 상기 TM 모드를 기반으로 도출된 움직임 정보를 기반으로 BIO 예측을 수행할 수 있다. 예를 들어, 상기 움직임 정보는 상기 현재 블록에 대한 MVL0 및 MVL1 을 포함할 수 있고, 인코딩 장치는 상기 현재 블록에 대한 MVL0 및 MVL1과 제1 프리딕터 및 제2 프리딕터를 기반으로 상기 현재 블록에 대한 블록 단위 리파인 움직임 벡터를 구할 수 있다. 예를 들어, 상기 현재 블록에 포함된 4x4 사이즈의 블록들에 대한 리파인 움직임 벡터들이 도출될 수 있다. 인코딩 장치는 상기 현재 블록에 대한 상기 MVL0 및 상기 MVL1과 상기 제1 프리딕터 및 상기 제2 프리딕터를 기반으로 상기 현재 블록의 대상 블록에 대한 리파인 움직임 벡터를 도출할 수 있고, 상기 리파인 움직임 벡터를 기반으로 리파인 예측 샘플들을 도출할 수 있다.
구체적으로, 인코딩 장치는 상기 대상 블록의 샘플들 각각을 기준으로 상기 MVL0에 따른 위치의 제1 프리딕터 및 MVL1에 따른 위치의 제2 프리딕터을 도출할 수 있고, 상기 제1 프리딕터 및 상기 제2 프리딕터를 기반으로 상기 대상 샘플에 대한 그래디언트들을 도출할 수 있다. 이 후, 인코딩 장치는 상기 샘플들에 대한 그래디언트들을 기반으로 상기 대상 블록의 리파인 움직임 벡터가 도출될 수 있다. 예를 들어, 상기 대상 블록에 대한 상기 리파인 움직임 벡터는 상술한 수학식 16을 기반으로 도출될 수 있다. 인코딩 장치는 상기 리파인 움직임 벡터를 기반으로 상기 대상 블록에 대한 리파인 예측 샘플들을 도출할 수 있다.
한편, 상기 현재 블록에 BM 모드가 적용된 경우, 인코딩 장치는 상기 현재 블록에 대한 BIO 예측을 수행하지 않고, 도출된 움직임 정보를 기반으로 예측을 수행할 수 있다.
도 9b는 FRUC 및/또는 BIO 가 적용된 현재 블록을 디코딩하는 일 예를 나타낸다.
도 9b를 참조하면 디코딩 장치는 상기 현재 블록에 TM 모드가 적용되는지 판단할 수 있다(S930). 디코딩 장치는 상기 현재 블록에 BM 모드 또는 TM 모드가 적용되는지 판단할 수 있다. 예를 들어, 디코딩 장치는 비트스트림을 통하여 상기 BM 모드 및 상기 TM 모드 중 하나를 나타내는 플래그를 획득할 수 있다. 디코딩 장치는 상기 BM 모드 및 상기 TM 모드 중 상기 플래그가 가리키는 모드를 상기 현재 블록에 적용되는 모드로 도출할 수 있다.
한편, 상기 현재 블록에 상기 TM 모드가 적용되는 경우, 디코딩 장치는 상기 TM 모드를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출한다(S940).
디코딩 장치는 L0 참조 픽처에 포함된 L0 참조 블록들 상기 현재 블록의 템플릿과의 코스트가 가장 작은 템플릿에 대한 L0 참조 블록을 가리키는 움직임 벡터를 상기 현재 블록에 대한 MVL0 로 도출될 수 있다. 여기서, 상기 현재 블록의 상기 템플릿은 상기 현재 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있고, 상기 L0 참조 블록의 상기 템플릿은 상기 현재 블록의 템플릿과 대응하는 영역일 수 있고, 상기 L0 참조 블록의 상기 템플릿은 상기 L0 참조 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있다. 상기 L0 참조 블록에 대한 코스트는 상기 현재 블록의 템플릿과 상기 L0 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference)로 도출될 수 있다.
또한, 디코딩 장치는 L1 참조 픽처에 포함된 L1 참조 블록들 상기 현재 블록의 템플릿과의 코스트가 가장 작은 템플릿에 대한 L1 참조 블록을 가리키는 움직임 벡터를 상기 현재 블록에 대한 MVL1 로 도출될 수 있다. 여기서, 상기 현재 블록의 상기 템플릿은 상기 현재 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있고, 상기 L1 참조 블록의 상기 템플릿은 상기 현재 블록의 템플릿과 대응하는 영역일 수 있고, 상기 L1 참조 블록의 상기 템플릿은 상기 L1 참조 블록의 좌측 주변 영역 및/또는 상측 주변 영역을 포함할 수 있다. 상기 L1 참조 블록에 대한 코스트는 상기 현재 블록의 템플릿과 상기 L1 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference)로 도출될 수 있다.
디코딩 장치는 L0 움직임 정보와 L1 움직임 정보를 포함하는 움직임 정보를 상기 현재 블록의 움직임 정보로 도출할 수 있다. 상기 L0 움직임 정보는 상기 MVL0 및 상기 L0 참조 픽처를 가리키는 참조 픽처 인덱스를 포함할 수 있고, 상기 L1 움직임 정보는 상기 MVL1 및 상기 L1 참조 픽처를 가리키는 참조 픽처 인덱스를 포함할 수 있다.
상기 현재 블록에 TM 모드가 적용된 경우, 디코딩 장치는 상기 현재 블록에 대한 움직임 정보를 기반으로 BIO 예측을 수행할 수 있다(S950). 디코딩 장치는 상기 TM 모드를 기반으로 도출된 움직임 정보를 기반으로 BIO 예측을 수행할 수 있다. 예를 들어, 상기 움직임 정보는 상기 현재 블록에 대한 MVL0 및 MVL1을 포함할 수 있고, 디코딩 장치는 상기 현재 블록에 대한 MVL0 및 MVL1과 제1 프리딕터 및 제2 프리딕터를 기반으로 상기 현재 블록에 대한 블록 단위 리파인 움직임 벡터를 구할 수 있다. 예를 들어, 상기 현재 블록에 포함된 4x4 사이즈의 블록들에 대한 리파인 움직임 벡터들이 도출될 수 있다. 디코딩 장치는 상기 현재 블록에 대한 상기 MVL0 및 상기 MVL1과 상기 제1 프리딕터 및 상기 제2 프리딕터를 기반으로 상기 현재 블록의 대상 블록에 대한 리파인 움직임 벡터를 도출할 수 있고, 상기 리파인 움직임 벡터를 기반으로 리파인 예측 샘플들을 도출할 수 있다.
구체적으로, 디코딩 장치는 상기 대상 블록의 샘플들 각각을 기준으로 상기 MVL0에 따른 위치의 제1 프리딕터 및 MVL1에 따른 위치의 제2 프리딕터을 도출할 수 있고, 상기 제1 프리딕터 및 상기 제2 프리딕터를 기반으로 상기 대상 샘플에 대한 그래디언트들을 도출할 수 있다. 이 후, 디코딩 장치는 상기 샘플들에 대한 그래디언트들을 기반으로 상기 대상 블록의 리파인 움직임 벡터가 도출될 수 있다. 예를 들어, 상기 대상 블록에 대한 상기 리파인 움직임 벡터는 상술한 수학식 16을 기반으로 도출될 수 있다. 디코딩 장치는 상기 리파인 움직임 벡터를 기반으로 상기 대상 블록에 대한 리파인 예측 샘플들을 도출할 수 있다.
한편, 상기 현재 블록에 상기 BM 모드가 적용되는 경우, 디코딩 장치는 상기 BM 모드를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출한다(S960).
예를 들어, 디코딩 장치는 상기 현재 블록의 주변 블록들을 기반으로 상기 현재 블록의 움직임 정보 후보 리스트를 도출할 수 있다. 상기 움직임 정보 후보 리스트에 포함된 후보는 L0 움직임 정보 또는 L1 움직임 정보를 포함할 수 있다.
이 후, 디코딩 장치는 BM 방법을 통하여 상기 움직임 정보 후보 리스트에 포함된 후보들에 대한 코스트들을 도출할 수 있고, 가장 작은 코스트를 갖는 후보를 기반으로 상기 현재 블록에 대한 움직임 정보를 도출할 수 있다.
상기 움직임 정보 후보 리스트에 포함된 후보에 대한 코스트는 다음과 같이 도출될 수 있다. 디코딩 장치는 상기 후보의 움직임 벡터를 현재 픽처를 중심으로 보간(interpolation)하여 상기 L0 방향 및 L1 방향 중 상기 움직임 벡터와 연관된 방향과 다른 방향의 상기 움직임 벡터에 대응되는 움직임 벡터를 도출할 수 있고, 상기 후보의 움직임 벡터가 가리키는 참조 블록과 상기 도출된 움직임 벡터가 가리키는 참조 블록과의 SAD 를 상기 후보의 코스트로 도출할 수 있다.
예를 들어, 상기 움직임 후보가 L0 움직임 정보를 포함하는 경우, 디코딩 장치는 제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 움직임 후보에 대한 MVL0 를 스케일링하여 MVL1을 도출할 수 있다. 디코딩 장치는 상기 MVL0가 가리키는 L0 참조 블록과 상기 MVL1 이 가리키는 L1 참조 블록과의 SAD 를 상기 움직임 후보의 코스트로 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 움직임 후보에 대한 L0 참조 픽처의 POC 와 현재 픽처의 POC 의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 MVL1 에 대한 L1 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있다.
또한, 예를 들어, 상기 움직임 후보가 L1 움직임 정보를 포함하는 경우, 디코딩 장치는 제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 움직임 후보에 대한 MVL1 를 스케일링하여 MVL0을 도출할 수 있다. 디코딩 장치는 상기 MVL1이 가리키는 L1 참조 블록과 상기 MVL0 가 가리키는 L0 참조 블록과의 SAD 를 상기 움직임 후보의 코스트로 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 움직임 후보에 대한 L1 참조 픽처의 POC 와 현재 픽처의 POC 의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 MVL0 에 대한 L0 참조 픽처의 POC 와 상기 현재 픽처의 POC 의 차이값일 수 있다.
디코딩 장치는 상기 후보들의 코스트들을 비교할 수 있고, 가장 작은 코스트를 갖는 후보의 움직임 정보(L0 움직임 정보 또는 L1 움직임 정보) 및 상기 후보를 기반으로 도출된 움직임 정보(L1 움직임 정보 또는 L0 움직임 정보)를 상기 현재 블록의 움직임 정보로 도출할 수 있다. 디코딩 장치는 상기 움직임 정보를 기반으로 상기 현재 블록에 대한 예측을 수행할 수 있다.
도 10은 본 발명에 따른 인코딩 장치에 의한 영상 인코딩 방법을 개략적으로 나타낸다. 도 10에서 개시된 방법은 도 1에서 개시된 인코딩 장치에 의하여 수행될 수 있다. 구체적으로 예를 들어, 도 10의 S1000 내지 S1040은 상기 인코딩 장치의 예측부에 의하여 수행될 수 있고, S1050은 상기 인코딩 장치의 엔트로피 인코딩부에 의하여 수행될 수 있다.
인코딩 장치는 참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출한다(S1000). 인코딩 장치는 상기 참조 픽처 리스트 0(L0) 및 상기 참조 픽처 리스트 1(L1)을 도출할 수 있고, 상기 참조 픽처 리스트 0은 L0(List 0)라고 불릴 수 있고, 상기 참조 픽처 리스트 1은 L1(List 1)이라고 불릴 수 있다.
인코딩 장치는 현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함한다(S1010). 인코딩 장치는 현재 블록이 B 슬라이스에 포함되고, 상기 현재 블록에 쌍 예측이 적용되는 경우 상기 두 개의 MV들을 도출할 수 있다. 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1일 수 있다.
인코딩 장치는 상기 현재 블록의 주변 블록을 기반으로 상기 현재 블록에 대한 상기 두 개의 MV들을 도출할 수 있다.
예를 들어, 인코딩 장치는 상기 주변 블록의 움직임 정보를 기반으로 움직임 정보 후보 리스트를 생성할 수 있고, RD 코스트를 기반으로 상기 움직임 정보 후보 리스트에 포함된 후보들 중 특정 후보를 선택할 수 있다. 인코딩 장치는 상기 특정 후보를 가리키는 인덱스를 생성할 수 있다. 상기 인덱스는 상술한 인터 예측에 대한 정보에 포함될 수 있다. 인코딩 장치는 상기 특정 후보의 MVL0 및 MVL1을 상기 현재 블록의 상기 두 개의 MV들로 도출할 수 있다.
또는, 인코딩 장치는 상기 현재 블록에 FRUC 을 적용하여 상기 두 개의 MV들을 도출할 수 있다.
구체적으로, 예를 들어, 인코딩 장치는 상기 현재 블록에 TM(Template Matching) 모드 또는 BM(Bi-lateral Matching) 모드가 적용되는지 결정할 수 있다. 또한, 인코딩 장치는 상기 TM 모드 및 상기 BM 모드 중 하나를 가리키는 플래그를 생성할 수 있다. 상기 인터 예측에 대한 정보는 상기 플래그를 포함할 수 있다.
상기 현재 블록에 상기 BM 모드가 적용된 경우, 인코딩 장치는 상기 현재 블록의 주변 블록을 기반으로 상기 현재 블록의 움직임 정보 후보 리스트를 도출할 수 있고, 상기 움직임 정보 후보 리스트에 포함된 후보들 중 특정 후보를 선택할 수 있다. 인코딩 장치는 제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 특정 후보의 제1 움직임 벡터를 스케일링하여 상기 L0 및 상기 L1 중 상기 움직임 벡터와 연관된 리스트와 다른 리스트에 연관된 제2 움직임 벡터를 도출할 수 있고, 상기 제1 움직임 벡터 및 상기 제2 움직임 벡터를 상기 현재 블록의 MV 들로 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 제1 움직임 벡터에 대한 참조 픽처의 POC(Picture Order Count)와 상기 현재 블록이 포함된 현재 픽처의 POC 와의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 제2 움직임 벡터에 대한 참조 픽처의 POC와 상기 현재 픽처의 POC 와의 차이값일 수 있다. 한편, 상기 움직임 정보 후보 리스트에 포함된 후보들 중 가장 작은 코스트를 갖는 후보가 상기 특정 후보로 선택될 수 있는바, 상기 특정 후보에 대한 코스트는 상기 제1 움직임 벡터가 가리키는 참조 블록과 상기 제2 움직임 벡터가 가리키는 참조 블록과의 SAD(Sum of Absolute Difference) 로 도출될 수 있다. 즉, 인코딩 장치는 상기 움직임 정보 후보 리스트에 대한 후보들의 제2 움직임 벡터들을 도출하여, 상기 후보들에 대한 코스트들을 도출할 수 있고, 상기 코스트들을 비교하여 상기 특정 후보를 선택할 수 있다.
또한, 상기 현재 블록에 상기 TM 모드가 적용된 경우, 인코딩 장치는 상기 현재 블록의 L0 참조 픽처 및 L1 참조 픽처를 도출할 수 있고, 상기 L0 참조 픽처의 L0 참조 블록들 중 가장 작은 코스트를 갖는 L0 참조 블록을 가리키는 움직임 벡터를 상기 MVL0 로 도출할 수 있고, 상기 L1 참조 픽처의 L1 참조 블록들 중 가장 작은 코스트를 갖는 L1 참조 블록을 가리키는 움직임 벡터를 상기 MVL1 로 도출할 수 있다. 여기서, 상기 L0 참조 블록의 코스트는 상기 현재 블록의 템플릿(template)과 상기 L0 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference) 로 도출될 수 있고, 상기 L1 참조 블록의 코스트는 상기 현재 블록의 템플릿과 상기 L1 참조 블록의 템플릿과의 SAD 로 도출될 수 있다. 또한, 상기 현재 블록의 템플릿은 상기 현재 블록의 주변 샘플들을 포함하는 특정 영역을 나타내고, 상기 L0 참조 블록의 템플릿은 상기 현재 블록의 주변 샘플들에 대응하는 상기 L0 참조 블록의 주변 샘플들을 포함하는 특정 영역을 나타내고, 상기 L1 참조 블록의 템플릿은 상기 현재 블록의 주변 샘플들에 대응하는 상기 L1 참조 블록의 주변 샘플들을 포함하는 특정 영역을 나타낼 수 있다. 한편, 상기 L0 참조 블록 또는 상기 L1 참조 블록의 코스트는 상술한 수학식 24를 기반으로 도출될 수 있다. 또한, 상기 L0 참조 픽처는 상기 L0에 포함된 L0 참조 픽처들 중 하나로 도출될 수 있고, 상기 L1 참조 픽처는 상기 L1에 포함된 L1 참조 픽처들 중 하나로 도출될 수 있다. 또한, 상기 L0 참조 픽처 및 상기 L1 참조 픽처는 상기 현재 블록의 주변 블록의 움직임 정보를 기반으로 도출될 수 있다.
한편, 인코딩 장치는 상기 현재 블록에 대하여 FRUC 가 적용되는지 여부를 나타내는 FRUC 플래그를 생성할 수 있다. 상기 인터 예측에 대한 정보는 상기 현재 블록에 대한 FRUC 플래그를 포함할 수 있다.
인코딩 장치는 서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 결정한다(S1020). 예를 들어, 인코딩 장치는 상기 현재 블록의 사이즈를 기반으로 상기 BIO 예측이 상기 현재 블록에 적용되는지 결정할 수 있다. 일 예로, 상기 현재 블록의 사이즈가 4x4 사이즈보다 작거나 같은 경우, 상기 현재 블록에 상기 BIO 예측이 적용되지 않을 수 있고, 상기 현재 블록의 사이즈가 4x4 사이즈보다 큰 경우, 상기 현재 블록에 상기 BIO 예측이 적용될 수 있다.
또한, 다른 예로, 인코딩 장치는 상기 TM 모드의 적용 여부를 기반으로 상기 BIO 예측이 상기 현재 블록에 적용되는지 결정할 수 있다. 일 예로, 상기 현재 블록에 상기 BM 모드가 적용되는 경우, 상기 현재 블록에 상기 BIO 예측이 적용되지 않을 수 있고, 상기 현재 블록에 상기 TM 모드가 적용되는 경우, 상기 현재 블록에 상기 BIO 예측이 적용될 수 있다.
상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 인코딩 장치는 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출한다(S1030). 여기서, 상기 서브 블록의 사이즈는 기설정될 수 있다. 예를 들어, 상기 서브 블록의 사이즈는 4x4 사이즈일 수 있다. 상기 리파인 움직임 벡터는 상기 현재 블록의 서브 블록 단위로 도출될 수 있다.
상기 MVL0 및 상기 MVL1을 기준으로 상기 서브 블록의 참조 샘플값의 x축, y축, 시간축 그래디언트 맵(gradient map)이 도출될 수 있고, 상기 서브 블록에 대한 그래디언트 맵을 기반으로 상기 서브 블록에 대한 상기 리파인 움직임 벡터가 도출될 수 있다. 상기 서브 블록에 대한 상기 리파인 움직임 벡터는 상술한 수학식 21 또는 수학식 23을 기반으로 도출될 수 있다.
인코딩 장치는 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출한다(S1040). 인코딩 장치는 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출할 수 있다. 상기 현재 블록의 상기 서브 블록에 대한 예측 샘플은 상술한 수학식 14에서 Vx 를 Vx,bk 로 대체하고, Vy 를 Vy,bk 로 대체한 수학식을 기반으로 도출될 수 있다. 또한, 상기 제1 시간 거리 및 상기 제2 시간 거리의 크기가 다른 경우, 상기 현재 블록의 상기 서브 블록에 대한 예측 샘플은 상술한 수학식 15 에서 Vx 를 Vx,bk 로 대체하고, Vy 를 Vy,bk 로 대체한 수학식을 기반으로 도출될 수 있다.
한편, 비록 도 10에 도시되지는 않았으나, 상기 BIO 예측이 적용되지 않는 것으로 판단된 경우, 인코딩 장치는 상기 MVL0 및 상기 MVL1을 기반으로 상기 대상 샘플에 대한 예측 샘플을 도출할 수 있다.
인코딩 장치는 상기 현재 블록의 인터 예측에 대한 정보를 엔트로피 인코딩한다(S1050). 인코딩 장치는 상기 인터 예측에 대한 정보를 엔트로피 인코딩할 수 있고, 비트스트림 형태로 출력할 수 있다. 상기 비트스트림은 네트워크 또는 저장매체를 통하여 디코딩 장치로 전송될 수 있다.
상기 인터 예측에 대한 정보는 상기 현재 블록의 예측 모드 정보를 포함할 수 있다. 상기 예측 모드 정보는 상기 현재 블록에 적용되는 인터 예측 모드를 나타낼 수 있다. 또한, 상기 인터 예측에 대한 정보는 상기 TM 모드 및 상기 BM 모드 중 하나를 가리키는 플래그를 포함할 수 있다. 또한, 상기 인터 예측에 대한 정보는 상기 현재 블록에 대한 FRUC 플래그를 포함할 수 있다.
한편, 인코딩 장치는 원본 픽처의 원본 샘플과 상기 생성된 예측 샘플을 기반으로 레지듀얼(residual) 샘플을 생성할 수 있다. 인코딩 장치는 상기 레지듀얼 샘플을 기반으로 상기 레지듀얼에 관한 정보를 생성할 수 있다. 상기 레지듀얼에 관한 정보는 상기 레지듀얼 샘플에 관한 변환 계수들을 포함할 수 있다. 인코딩 장치는 상기 예측 샘플과 상기 레지듀얼 샘플을 기반으로 상기 복원 샘플을 도출할 수 있다. 즉, 인코딩 장치는 상기 예측 샘플과 상기 레지듀얼 샘플을 더하여 상기 복원 샘플을 도출할 수 있다. 또한, 인코딩 장치는 상기 레지듀얼에 관한 정보를 인코딩하여 비트스트림 형태로 출력할 수 있다. 상기 비트스트림은 네트워크 또는 저장매체를 통하여 디코딩 장치로 전송될 수 있다.
도 11은 본 발명에 따른 영상 인코딩 방법을 수행하는 인코딩 장치를 개략적으로 나타낸다. 도 10에서 개시된 방법은 도 11에서 개시된 인코딩 장치에 의하여 수행될 수 있다. 구체적으로 예를 들어, 도 11의 상기 인코딩 장치의 예측부는 도 10의 S1000 내지 S1040을 수행할 수 있고, 상기 인코딩 장치의 엔트로피 인코딩부는 도 10의 S1050을 수행할 수 있다.
도 12는 본 발명에 따른 디코딩 장치에 의한 영상 디코딩 방법을 개략적으로 나타낸다. 도 12에서 개시된 방법은 도 2에서 개시된 디코딩 장치에 의하여 수행될 수 있다. 구체적으로 예를 들어, 도 12의 S1200 내지 S1240은 상기 디코딩 장치의 예측부에 의하여 수행될 수 있다.
디코딩 장치는 참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출한다(S1200). 디코딩 장치는 상기 참조 픽처 리스트 0(L0) 및 상기 참조 픽처 리스트 1(L1)을 도출할 수 있고, 상기 참조 픽처 리스트 0은 L0(List 0)라고 불릴 수 있고, 상기 참조 픽처 리스트 1은 L1(List 1)이라고 불릴 수 있다.
디코딩 장치는 현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함한다(S1210). 디코딩 장치는 인터 예측에 대한 정보를 비트스트림을 통하여 획득할 수 있으며, 상기 인터 예측에 대한 정보를 기반으로 상기 현재 블록에 적용되는 인터 예측 모드를 도출할 수 있다.
디코딩 장치는 현재 블록이 B 슬라이스에 포함되고, 상기 현재 블록에 쌍 예측이 적용되는 경우 상기 두 개의 MV들을 도출할 수 있다. 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1일 수 있다.
디코딩 장치는 상기 현재 블록의 주변 블록을 기반으로 상기 현재 블록에 대한 상기 두 개의 MV들을 도출할 수 있다.
예를 들어, 디코딩 장치는 상기 주변 블록의 움직임 정보를 기반으로 움직임 정보 후보 리스트를 생성할 수 있고, 상기 움직임 정보 후보 리스트에 포함된 후보들 중 특정 후보를 가리키는 인덱스를 기반으로 상기 특정 후보를 선택할 수 있다. 상기 인덱스는 상술한 인터 예측에 대한 정보에 포함될 수 있다. 디코딩 장치는 상기 특정 후보의 MVL0 및 MVL1을 상기 현재 블록의 상기 두 개의 MV들로 도출할 수 있다.
또는, 디코딩 장치는 상기 현재 블록에 FRUC 을 적용하여 상기 두 개의 MV들을 도출할 수 있다.
구체적으로, 예를 들어, 디코딩 장치는 상기 현재 블록에 TM(Template Matching) 모드 또는 BM(Bi-lateral Matching) 모드가 적용되는지 판단할 수 있다. 일 예로, 디코딩 장치는 상기 TM 모드 및 상기 BM 모드 중 하나를 가리키는 플래그를 획득할 수 있고, 상기 플래그가 가리키는 모드를 상기 현재 블록에 적용된다고 판단할 수 있다. 상기 인터 예측에 대한 정보는 상기 플래그를 포함할 수 있다.
상기 현재 블록에 상기 BM 모드가 적용된 경우, 디코딩 장치는 상기 현재 블록의 주변 블록을 기반으로 상기 현재 블록의 움직임 정보 후보 리스트를 도출할 수 있고, 상기 움직임 정보 후보 리스트에 포함된 후보들 중 특정 후보를 선택할 수 있다. 디코딩 장치는 제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 특정 후보의 제1 움직임 벡터를 스케일링하여 상기 L0 및 상기 L1 중 상기 움직임 벡터와 연관된 리스트와 다른 리스트에 연관된 제2 움직임 벡터를 도출할 수 있고, 상기 제1 움직임 벡터 및 상기 제2 움직임 벡터를 상기 현재 블록의 MV 들로 도출할 수 있다. 여기서, 상기 제1 시간적 거리는 상기 제1 움직임 벡터에 대한 참조 픽처의 POC(Picture Order Count)와 상기 현재 블록이 포함된 현재 픽처의 POC 와의 차이값일 수 있고, 상기 제2 시간적 거리는 상기 제2 움직임 벡터에 대한 참조 픽처의 POC와 상기 현재 픽처의 POC 와의 차이값일 수 있다. 한편, 상기 움직임 정보 후보 리스트에 포함된 후보들 중 가장 작은 코스트를 갖는 후보가 상기 특정 후보로 선택될 수 있는바, 상기 특정 후보에 대한 코스트는 상기 제1 움직임 벡터가 가리키는 참조 블록과 상기 제2 움직임 벡터가 가리키는 참조 블록과의 SAD(Sum of Absolute Difference) 로 도출될 수 있다. 즉, 디코딩 장치는 상기 움직임 정보 후보 리스트에 대한 후보들의 제2 움직임 벡터들을 도출하여, 상기 후보들에 대한 코스트들을 도출할 수 있고, 상기 코스트들을 비교하여 상기 특정 후보를 선택할 수 있다.
또한, 상기 현재 블록에 상기 TM 모드가 적용된 경우, 디코딩 장치는 상기 현재 블록의 L0 참조 픽처 및 L1 참조 픽처를 도출할 수 있고, 상기 L0 참조 픽처의 L0 참조 블록들 중 가장 작은 코스트를 갖는 L0 참조 블록을 가리키는 움직임 벡터를 상기 MVL0 로 도출할 수 있고, 상기 L1 참조 픽처의 L1 참조 블록들 중 가장 작은 코스트를 갖는 L1 참조 블록을 가리키는 움직임 벡터를 상기 MVL1 로 도출할 수 있다. 여기서, 상기 L0 참조 블록의 코스트는 상기 현재 블록의 템플릿(template)과 상기 L0 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference) 로 도출될 수 있고, 상기 L1 참조 블록의 코스트는 상기 현재 블록의 템플릿과 상기 L1 참조 블록의 템플릿과의 SAD 로 도출될 수 있다. 또한, 상기 현재 블록의 템플릿은 상기 현재 블록의 주변 샘플들을 포함하는 특정 영역을 나타내고, 상기 L0 참조 블록의 템플릿은 상기 현재 블록의 주변 샘플들에 대응하는 상기 L0 참조 블록의 주변 샘플들을 포함하는 특정 영역을 나타내고, 상기 L1 참조 블록의 템플릿은 상기 현재 블록의 주변 샘플들에 대응하는 상기 L1 참조 블록의 주변 샘플들을 포함하는 특정 영역을 나타낼 수 있다. 한편, 상기 L0 참조 블록 또는 상기 L1 참조 블록의 코스트는 상술한 수학식 24를 기반으로 도출될 수 있다. 또한, 상기 L0 참조 픽처는 상기 L0에 포함된 L0 참조 픽처들 중 하나로 도출될 수 있고, 상기 L1 참조 픽처는 상기 L1에 포함된 L1 참조 픽처들 중 하나로 도출될 수 있다. 또한, 상기 L0 참조 픽처 및 상기 L1 참조 픽처는 상기 현재 블록의 주변 블록의 움직임 정보를 기반으로 도출될 수 있다.
한편, 상기 인터 예측에 대한 정보는 상기 현재 블록에 대한 FRUC 플래그를 포함할 수 있고, 상기 FRUC 플래그는 상기 현재 블록에 대하여 FRUC 가 적용되는지 여부를 나타낼 수 있다.
디코딩 장치는 서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 판단한다(S1220). 예를 들어, 디코딩 장치는 상기 현재 블록의 사이즈를 기반으로 상기 BIO 예측이 상기 현재 블록에 적용되는지 판단할 수 있다. 일 예로, 상기 현재 블록의 사이즈가 4x4 사이즈보다 작거나 같은 경우, 상기 현재 블록에 상기 BIO 예측이 적용되지 않을 수 있고, 상기 현재 블록의 사이즈가 4x4 사이즈보다 큰 경우, 상기 현재 블록에 상기 BIO 예측이 적용될 수 있다.
또한, 다른 예로, 디코딩 장치는 상기 TM 모드의 적용 여부를 기반으로 상기 BIO 예측이 상기 현재 블록에 적용되는지 판단할 수 있다. 일 예로, 상기 현재 블록에 상기 BM 모드가 적용되는 경우, 상기 현재 블록에 상기 BIO 예측이 적용되지 않을 수 있고, 상기 현재 블록에 상기 TM 모드가 적용되는 경우, 상기 현재 블록에 상기 BIO 예측이 적용될 수 있다.
상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 디코딩 장치는 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출한다(S1230). 여기서, 상기 서브 블록의 사이즈는 기설정될 수 있다. 예를 들어, 상기 서브 블록의 사이즈는 4x4 사이즈일 수 있다. 상기 리파인 움직임 벡터는 상기 현재 블록의 서브 블록 단위로 도출될 수 있다.
상기 MVL0 및 상기 MVL1을 기준으로 상기 서브 블록의 참조 샘플값의 x축, y축, 시간축 그래디언트 맵(gradient map)이 도출될 수 있고, 상기 서브 블록에 대한 그래디언트 맵을 기반으로 상기 서브 블록에 대한 상기 리파인 움직임 벡터가 도출될 수 있다. 상기 서브 블록에 대한 상기 리파인 움직임 벡터는 상술한 수학식 21 또는 수학식 23을 기반으로 도출될 수 있다.
디코딩 장치는 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출한다(S1240). 디코딩 장치는 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출할 수 있다. 상기 현재 블록의 상기 서브 블록에 대한 예측 샘플은 상술한 수학식 14에서 Vx 를 Vx,bk 로 대체하고, Vy 를 Vy,bk 로 대체한 수학식을 기반으로 도출될 수 있다. 또한, 상기 제1 시간 거리 및 상기 제2 시간 거리의 크기가 다른 경우, 상기 현재 블록의 상기 서브 블록에 대한 예측 샘플은 상술한 수학식 15 에서 Vx 를 Vx,bk 로 대체하고, Vy 를 Vy,bk 로 대체한 수학식을 기반으로 도출될 수 있다.
디코딩 장치는 예측 모드에 따라 상기 예측 샘플을 바로 복원 샘플로 이용할 수도 있고, 또는 상기 예측 샘플에 레지듀얼 샘플을 더하여 복원 샘플을 생성할 수도 있다.
디코딩 장치는 상기 현재 블록에 대한 레지듀얼 샘플이 존재하는 경우, 상기 비트스트림으로부터 상기 현재 블록에 대한 레지듀얼에 관한 정보를 획득할 수 있다. 상기 레지듀얼에 관한 정보는 상기 레지듀얼 샘플에 관한 변환 계수를 포함할 수 있다. 디코딩 장치는 상기 레지듀얼 정보를 기반으로 상기 현재 블록에 대한 상기 레지듀얼 샘플(또는 레지듀얼 샘플 어레이)을 도출할 수 있다. 디코딩 장치는 상기 예측 샘플과 상기 레지듀얼 샘플을 기반으로 복원 샘플을 생성할 수 있고, 상기 복원 샘플을 기반으로 복원 블록 또는 복원 픽처를 도출할 수 있다. 이후 디코딩 장치는 필요에 따라 주관적/객관적 화질을 향상시키기 위하여 디블록킹 필터링 및/또는 SAO 절차와 같은 인루프 필터링 절차를 상기 복원 픽처에 적용할 수 있음은 상술한 바와 같다.
한편, 비록 도 12에 도시되지는 않았으나, 상기 BIO 예측이 적용되지 않는 것으로 판단된 경우, 디코딩 장치는 상기 MVL0 및 상기 MVL1을 기반으로 상기 대상 샘플에 대한 예측 샘플을 도출할 수 있다. 디코딩 장치는 예측 모드에 따라 상기 예측 샘플을 바로 복원 샘플로 이용할 수도 있고, 또는 상기 예측 샘플에 레지듀얼 샘플을 더하여 복원 샘플을 생성할 수도 있다.
도 13은 본 발명에 따른 영상 디코딩 방법을 수행하는 디코딩 장치를 개략적으로 나타낸다. 도 12에서 개시된 방법은 도 13에서 개시된 디코딩 장치에 의하여 수행될 수 있다. 구체적으로 예를 들어, 도 13의 상기 디코딩 장치의 예측부는 도 12의 S1200 내지 S1240을 수행할 수 있다. 한편, 상기 인터 예측에 대한 정보 및/또는 레지듀얼에 관한 정보는 도 13에서 개시된 디코딩 장치의 엔트로피 디코딩부에 의하여 획득될 수 있다.
상술한 본 발명에 따르면 현재 블록의 BIO 예측 적용 여부를 판단하여 서브 블록 단위로 도출되는 리파인 움직임 벡터를 사용하는 인터 예측의 계산 복잡도를 낮출 수 있고, 이를 통하여 전체적인 코딩 효율을 향상시킬 수 있다.
또한, 본 발명에 따르면 FRUC 의 모드를 기반으로 BIO 예측 적용 여부를 판단하여 서브 블록 단위로 도출되는 리파인 움직임 벡터를 사용하는 인터 예측의 계산 복잡도를 낮출 수 있고, 이를 통하여 전체적인 코딩 효율을 향상시킬 수 있다.
상술한 실시예에서, 방법들은 일련의 단계 또는 블록으로써 순서도를 기초로 설명되고 있지만, 본 발명은 단계들의 순서에 한정되는 것은 아니며, 어떤 단계는 상술한 바와 다른 단계와 다른 순서로 또는 동시에 발생할 수 있다. 또한, 당업자라면 순서도에 나타내어진 단계들이 배타적이지 않고, 다른 단계가 포함되거나 순서도의 하나 또는 그 이상의 단계가 본 발명의 범위에 영향을 미치지 않고 삭제될 수 있음을 이해할 수 있을 것이다.
상술한 본 발명에 따른 방법은 소프트웨어 형태로 구현될 수 있으며, 본 발명에 따른 인코딩 장치 및/또는 디코딩 장치는 예를 들어 TV, 컴퓨터, 스마트폰, 셋톱박스, 디스플레이 장치 등의 영상 처리를 수행하는 장치에 포함될 수 있다.
본 발명에서 실시예들이 소프트웨어로 구현될 때, 상술한 방법은 상술한 기능을 수행하는 모듈(과정, 기능 등)로 구현될 수 있다. 모듈은 메모리에 저장되고, 프로세서에 의해 실행될 수 있다. 메모리는 프로세서 내부 또는 외부에 있을 수 있고, 잘 알려진 다양한 수단으로 프로세서와 연결될 수 있다. 프로세서는 ASIC(application-specific integrated circuit), 다른 칩셋, 논리 회로 및/또는 데이터 처리 장치를 포함할 수 있다. 메모리는 ROM(read-only memory), RAM(random access memory), 플래쉬 메모리, 메모리 카드, 저장 매체 및/또는 다른 저장 장치를 포함할 수 있다. 즉, 본 발명에서 설명한 실시예들은 프로세서, 마이크로 프로세서, 컨트롤러 또는 칩 상에서 구현되어 수행될 수 있다. 예를 들어, 각 도면에서 도시한 기능 유닛들은 컴퓨터, 프로세서, 마이크로 프로세서, 컨트롤러 또는 칩 상에서 구현되어 수행될 수 있다.
또한, 본 발명이 적용되는 디코딩 장치 및 인코딩 장치는 멀티미디어 방송 송수신 장치, 모바일 통신 단말, 홈 시네마 비디오 장치, 디지털 시네마 비디오 장치, 감시용 카메라, 비디오 대화 장치, 비디오 통신과 같은 실시간 통신 장치, 모바일 스트리밍 장치, 저장 매체, 캠코더, 주문형 비디오(VoD) 서비스 제공 장치, OTT 비디오(Over the top video) 장치, 인터넷 스트리밍 서비스 제공 장치, 3차원(3D) 비디오 장치, 화상 전화 비디오 장치, 및 의료용 비디오 장치 등에 포함될 수 있으며, 비디오 신호 또는 데이터 신호를 처리하기 위해 사용될 수 있다. 예를 들어, OTT 비디오(Over the top video) 장치로는 게임 콘솔, 블루레이 플레이어, 인터넷 접속 TV, 홈시어터 시스템, 스마트폰, 태블릿 PC, DVR(Digital Video Recoder) 등을 포함할 수 있다.
또한, 본 발명이 적용되는 처리 방법은 컴퓨터로 실행되는 프로그램의 형태로 생산될 수 있으며, 컴퓨터가 판독할 수 있는 기록 매체에 저장될 수 있다. 본 발명에 따른 데이터 구조를 가지는 멀티미디어 데이터도 또한 컴퓨터가 판독할 수 있는 기록 매체에 저장될 수 있다. 상기 컴퓨터가 판독할 수 있는 기록 매체는 컴퓨터로 읽을 수 있는 데이터가 저장되는 모든 종류의 저장 장치 및 분산 저장 장치를 포함한다. 상기 컴퓨터가 판독할 수 있는 기록 매체는, 예를 들어, 블루레이 디스크(BD), 범용 직렬 버스(USB), ROM, PROM, EPROM, EEPROM, RAM, CD-ROM, 자기 테이프, 플로피 디스크 및 광학적 데이터 저장 장치를 포함할 수 있다. 또한, 상기 컴퓨터가 판독할 수 있는 기록 매체는 반송파(예를 들어, 인터넷을 통한 전송)의 형태로 구현된 미디어를 포함한다. 또한, 인코딩 방법으로 생성된 비트스트림이 컴퓨터가 판독할 수 있는 기록 매체에 저장되거나 유무선 통신 네트워크를 통해 전송될 수 있다. 또한, 본 발명의 실시예는 프로그램 코드에 의한 컴퓨터 프로그램 제품으로 구현될 수 있고, 상기 프로그램 코드는 본 발명의 실시예에 의해 컴퓨터에서 수행될 수 있다. 상기 프로그램 코드는 컴퓨터에 의해 판독 가능한 캐리어 상에 저장될 수 있다.
또한, 본 발명이 적용되는 컨텐츠 스트리밍 시스템은 크게 인코딩 서버, 스트리밍 서버, 웹 서버, 미디어 저장소, 사용자 장치 및 멀티미디어 입력 장치를 포함할 수 있다.
상기 인코딩 서버는 스마트폰, 카메라, 캠코더 등과 같은 멀티미디어 입력 장치들로부터 입력된 컨텐츠를 디지털 데이터로 압축하여 비트스트림을 생성하고 이를 상기 스트리밍 서버로 전송하는 역할을 한다. 다른 예로, 스마트폰, 카메라, 캠코더 등과 같은 멀티미디어 입력 장치들이 비트스트림을 직접 생성하는 경우, 상기 인코딩 서버는 생략될 수 있다. 상기 비트스트림은 본 발명이 적용되는 인코딩 방법 또는 비트스트림 생성 방법에 의해 생성될 수 있고, 상기 스트리밍 서버는 상기 비트스트림을 전송 또는 수신하는 과정에서 일시적으로 상기 비트스트림을 저장할 수 있다.
상기 스트리밍 서버는 웹 서버를 통한 사용자 요청에 기초하여 멀티미디어 데이터를 사용자 장치에 전송하고, 상기 웹 서버는 사용자에게 어떠한 서비스가 있는지를 알려주는 매개체 역할을 한다. 사용자가 상기 웹 서버에 원하는 서비스를 요청하면, 상기 웹 서버는 이를 스트리밍 서버에 전달하고, 상기 스트리밍 서버는 사용자에게 멀티미디어 데이터를 전송한다. 이때, 상기 컨텐츠 스트리밍 시스템은 별도의 제어 서버를 포함할 수 있고, 이 경우 상기 제어 서버는 상기 컨텐츠 스트리밍 시스템 내 각 장치 간 명령/응답을 제어하는 역할을 한다.
상기 스트리밍 서버는 미디어 저장소 및/또는 인코딩 서버로부터 컨텐츠를 수신할 수 있다. 예를 들어, 상기 인코딩 서버로부터 컨텐츠를 수신하게 되는 경우, 상기 컨텐츠를 실시간으로 수신할 수 있다. 이 경우, 원활한 스트리밍 서비스를 제공하기 위하여 상기 스트리밍 서버는 상기 비트스트림을 일정 시간동안 저장할 수 있다.
상기 사용자 장치의 예로는, 휴대폰, 스마트 폰(smart phone), 노트북 컴퓨터(laptop computer), 디지털방송용 단말기, PDA(personal digital assistants), PMP(portable multimedia player), 네비게이션, 슬레이트 PC(slate PC), 태블릿 PC(tablet PC), 울트라북(ultrabook), 웨어러블 디바이스(wearable device, 예를 들어, 워치형 단말기 (smartwatch), 글래스형 단말기 (smart glass), HMD(head mounted display)), 디지털 TV, 데스크탑 컴퓨터, 디지털 사이니지 등이 있을 수 있다. 상기 컨텐츠 스트리밍 시스템 내 각 서버들은 분산 서버로 운영될 수 있으며, 이 경우 각 서버에서 수신하는 데이터는 분산 처리될 수 있다.
Claims (15)
- 디코딩 장치에 의하여 수행되는 영상 디코딩 방법에 있어서,
참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출하는 단계;
현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함하는 단계;
서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 판단하는 단계;
상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출하는 단계; 및
상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출하는 단계를 포함하는 것을 특징으로 하는 영상 디코딩 방법. - 제1항에 있어서,
상기 서브 블록 단위로 리파인 움직임 벡터를 도출하는 상기 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 판단하는 단계는,
상기 현재 블록의 사이즈를 기반으로 상기 BIO 예측이 상기 현재 블록에 적용되는지 판단하는 단계를 포함하고,
상기 현재 블록의 사이즈가 4x4 사이즈보다 작거나 같은 경우, 상기 현재 블록에 상기 BIO 예측이 적용되지 않고, 상기 현재 블록의 사이즈가 4x4 사이즈보다 큰 경우, 상기 현재 블록에 상기 BIO 예측이 적용되는 것을 특징으로 하는 영상 디코딩 방법. - 제1항에 있어서,
상기 현재 블록에 대한 상기 두 개의 MV들을 도출하는 단계는,
상기 현재 블록에 TM(Template Matching) 모드 또는 BM(Bi-lateral Matching) 모드가 적용되는지 판단하는 단계를 포함하는 것을 특징으로 하는 영상 디코딩 방법. - 제3항에 있어서,
상기 현재 블록에 대한 상기 두 개의 MV들을 도출하는 단계는,
상기 현재 블록에 상기 BM 모드가 적용된 경우, 상기 현재 블록의 주변 블록을 기반으로 상기 현재 블록의 움직임 정보 후보 리스트를 도출하는 단계;
상기 움직임 정보 후보 리스트에 포함된 후보들 중 특정 후보를 선택하는 단계;
제1 시간적 거리 및 제2 시간적 거리를 기반으로 상기 특정 후보의 제1 움직임 벡터를 스케일링하여 상기 L0 및 상기 L1 중 상기 움직임 벡터와 연관된 리스트와 다른 리스트에 연관된 제2 움직임 벡터를 도출하는 단계; 및
상기 제1 움직임 벡터 및 상기 제2 움직임 벡터를 상기 현재 블록의 MV 들로 도출하는 단계를 더 포함하고,
상기 제1 시간적 거리는 상기 제1 움직임 벡터에 대한 참조 픽처의 POC(Picture Order Count)와 상기 현재 블록이 포함된 현재 픽처의 POC 와의 차이값이고,
상기 제2 시간적 거리는 상기 제2 움직임 벡터에 대한 참조 픽처의 POC와 상기 현재 픽처의 POC 와의 차이값인 것을 특징으로 하는 영상 디코딩 방법. - 제4항에 있어서,
상기 움직임 정보 후보 리스트에 포함된 후보들 중 가장 작은 코스트를 갖는 후보가 상기 특정 후보로 선택되고,
상기 특정 후보에 대한 코스트는 상기 제1 움직임 벡터가 가리키는 참조 블록과 상기 제2 움직임 벡터가 가리키는 참조 블록과의 SAD(Sum of Absolute Difference) 로 도출되는 것을 특징으로 하는 영상 디코딩 방법. - 제3항에 있어서,
상기 현재 블록에 대한 상기 두 개의 MV들을 도출하는 단계는,
상기 현재 블록에 상기 TM 모드가 적용된 경우, 상기 현재 블록의 L0 참조 픽처 및 L1 참조 픽처를 도출하는 단계;
상기 L0 참조 픽처의 L0 참조 블록들 중 가장 작은 코스트를 갖는 L0 참조 블록을 가리키는 움직임 벡터를 상기 MVL0 로 도출하는 단계; 및
상기 L1 참조 픽처의 L1 참조 블록들 중 가장 작은 코스트를 갖는 L1 참조 블록을 가리키는 움직임 벡터를 상기 MVL1 로 도출하는 단계를 더 포함하고,
상기 L0 참조 블록의 코스트는 상기 현재 블록의 템플릿(template)과 상기 L0 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference) 로 도출되고,
상기 L1 참조 블록의 코스트는 상기 현재 블록의 템플릿과 상기 L1 참조 블록의 템플릿과의 SAD 로 도출되는 것을 특징으로 하는 영상 디코딩 방법. - 제6항에 있어서,
상기 현재 블록의 템플릿은 상기 현재 블록의 주변 샘플들을 포함하는 특정 영역을 나타내고, 상기 L0 참조 블록의 템플릿은 상기 현재 블록의 주변 샘플들에 대응하는 상기 L0 참조 블록의 주변 샘플들을 포함하는 특정 영역을 나타내고, 상기 L1 참조 블록의 템플릿은 상기 현재 블록의 주변 샘플들에 대응하는 상기 L1 참조 블록의 주변 샘플들을 포함하는 특정 영역을 나타내는 것을 특징으로 하는 영상 디코딩 방법. - 제7항에 있어서,
상기 L0 참조 블록 또는 상기 L1 참조 블록의 코스트는 다음의 수학식을 기반으로 도출되고,

여기서, Costdistortion 은 상기 L0 참조 블록 또는 상기 L1 참조 블록의 코스트, Tempcur(i, j)는 상기 현재 블록의 상기 템플릿 내 (i, j) 좌표의 복원 샘플, Tempref(i, j)는 상기 L0 참조 블록 또는 상기 L1 참조 블록의 템플릿 내 (i, j) 좌표의 복원 샘플을 나타내는 것을 특징으로 하는 영상 디코딩 방법. - 제3항에 있어서,
상기 서브 블록 단위로 리파인 움직임 벡터를 도출하는 상기 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 판단하는 단계는,
상기 TM 모드의 적용 여부를 기반으로 상기 BIO 예측이 상기 현재 블록에 적용되는지 판단하는 단계를 포함하고,
상기 현재 블록에 상기 BM 모드가 적용되는 경우, 상기 현재 블록에 상기 BIO 예측이 적용되지 않고, 상기 현재 블록에 상기 TM 모드가 적용되는 경우, 상기 현재 블록에 상기 BIO 예측이 적용되는 것을 특징으로 하는 영상 디코딩 방법. - 영상 디코딩을 수행하는 디코딩 장치에 있어서,
비트스트림을 통하여 현재 블록의 인터 예측에 대한 정보를 획득하는 엔트로피 디코딩부; 및
참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출하고, 상기 현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함하고, 서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 판단하고, 상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출하고, 상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출하는 예측부를 포함하는 영상 디코딩 장치. - 인코딩 장치에 의하여 수행되는 영상 인코딩 방법에 있어서,
참조 픽처 리스트 0(L0) 및 참조 픽처 리스트 1(L1)을 도출하는 단계;
현재 블록에 대한 두 개의 움직임 벡터(motion vector, MV)들을 도출하되, 상기 두 개의 MV들은 상기 L0에 관한 MVL0 및 상기 L1에 관한 MVL1을 포함하는 단계;
서브 블록 단위로 리파인 움직임 벡터를 도출하는 BIO(bi-prediction optical-flow) 예측이 상기 현재 블록에 적용되는지 결정하는 단계;
상기 현재 블록에 상기 BIO 예측이 적용되는 경우, 상기 MVL0 및 상기 MVL1을 기반으로 상기 현재 블록의 서브 블록에 대한 상기 리파인 움직임 벡터를 도출하는 단계;
상기 리파인 움직임 벡터를 기반으로 예측 샘플을 도출하는 단계; 및
상기 현재 블록의 인터 예측에 대한 정보를 엔트로피 인코딩하는 단계를 포함하는 것을 특징으로 하는 영상 인코딩 방법. - 제11항에 있어서,
상기 서브 블록 단위로 리파인 움직임 벡터를 도출하는 상기 BIO 예측이 상기 현재 블록에 적용되는지 결정하는 단계는,
상기 현재 블록의 사이즈를 기반으로 상기 BIO 예측이 상기 현재 블록에 적용되는지 결정하는 단계를 포함하고,
상기 현재 블록의 사이즈가 4x4 사이즈보다 작거나 같은 경우, 상기 현재 블록에 상기 BIO 예측이 적용되지 않고, 상기 현재 블록의 사이즈가 4x4 사이즈보다 큰 경우, 상기 현재 블록에 상기 BIO 예측이 적용되는 것을 특징으로 하는 영상 인코딩 방법. - 제11항에 있어서,
상기 현재 블록에 대한 상기 두 개의 MV들을 도출하는 단계는,
상기 현재 블록에 TM(Template Matching) 모드 또는 BM(Bi-lateral Matching) 모드가 적용되는지 결정하는 단계를 포함하는 것을 특징으로 하는 영상 인코딩 방법. - 제13항에 있어서,
상기 서브 블록 단위로 리파인 움직임 벡터를 도출하는 상기 BIO 예측이 상기 현재 블록에 적용되는지 판단하는 단계는,
상기 TM 모드의 적용 여부를 기반으로 상기 BIO 예측이 상기 현재 블록에 적용되는지 판단하는 단계를 포함하고,
상기 현재 블록에 상기 BM 모드가 적용되는 경우, 상기 현재 블록에 상기 BIO 예측이 적용되지 않고, 상기 현재 블록에 상기 TM 모드가 적용되는 경우, 상기 현재 블록에 상기 BIO 예측이 적용되는 것을 특징으로 하는 영상 인코딩 방법. - 제13항에 있어서,
상기 현재 블록에 대한 상기 두 개의 MV들을 도출하는 단계는,
상기 현재 블록에 상기 TM 모드가 적용된 경우, 상기 현재 블록의 L0 참조 픽처 및 L1 참조 픽처를 도출하는 단계;
상기 L0 참조 픽처의 L0 참조 블록들 중 가장 작은 코스트를 갖는 L0 참조 블록을 가리키는 움직임 벡터를 상기 MVL0 로 도출하는 단계; 및
상기 L1 참조 픽처의 L1 참조 블록들 중 가장 작은 코스트를 갖는 L1 참조 블록을 가리키는 움직임 벡터를 상기 MVL1 로 도출하는 단계를 더 포함하고,
상기 L0 참조 블록의 코스트는 상기 현재 블록의 템플릿(template)과 상기 L0 참조 블록의 템플릿과의 SAD(Sum of Absolute Difference) 로 도출되고,
상기 L1 참조 블록의 코스트는 상기 현재 블록의 템플릿과 상기 L1 참조 블록의 템플릿과의 SAD 로 도출되는 것을 특징으로 하는 영상 인코딩 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020217030250A KR102414180B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762598992P | 2017-12-14 | 2017-12-14 | |
| US62/598,992 | 2017-12-14 | ||
| PCT/KR2018/015818 WO2019117640A1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020217030250A Division KR102414180B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200078648A true KR20200078648A (ko) | 2020-07-01 |
| KR102305966B1 KR102305966B1 (ko) | 2021-09-28 |
Family
ID=66819384
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207016731A KR102305966B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| KR1020227021524A KR102523002B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| KR1020217030250A KR102414180B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| KR1020237012639A KR102638336B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| KR1020247005201A KR20240025058A (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
Family Applications After (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227021524A KR102523002B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| KR1020217030250A KR102414180B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| KR1020237012639A KR102638336B1 (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| KR1020247005201A KR20240025058A (ko) | 2017-12-14 | 2018-12-13 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US11647221B2 (ko) |
| EP (1) | EP3713236A4 (ko) |
| JP (2) | JP7366901B2 (ko) |
| KR (5) | KR102305966B1 (ko) |
| CN (1) | CN111630859B (ko) |
| MX (1) | MX2020006250A (ko) |
| WO (1) | WO2019117640A1 (ko) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11575933B2 (en) * | 2018-04-06 | 2023-02-07 | Vid Scale, Inc. | Bi-directional optical flow method with simplified gradient derivation |
| TWI752341B (zh) * | 2018-08-04 | 2022-01-11 | 大陸商北京字節跳動網絡技術有限公司 | 不同解碼器側運動矢量推導模式之間的交互 |
| CN111010569B (zh) | 2018-10-06 | 2023-02-28 | 北京字节跳动网络技术有限公司 | Bio中的时间梯度计算的改善 |
| US11968401B2 (en) * | 2019-04-03 | 2024-04-23 | Lg Electronics Inc. | Video or image coding method and device therefor |
| CN113411594B (zh) * | 2019-06-21 | 2022-05-31 | 杭州海康威视数字技术股份有限公司 | 一种编解码方法、装置及其设备 |
| KR20240029111A (ko) * | 2019-06-24 | 2024-03-05 | 엘지전자 주식회사 | 움직임 벡터를 이용한 영상 코딩 방법 및 장치 |
| CN111699689B (zh) * | 2019-06-25 | 2023-03-31 | 北京大学 | 视频处理方法、装置和设备 |
| KR20220140047A (ko) * | 2019-07-10 | 2022-10-17 | 베이징 다지아 인터넷 인포메이션 테크놀로지 컴퍼니 리미티드 | 광 흐름을 이용한 예측 개선 방법 및 장치 |
| WO2021040426A1 (ko) * | 2019-08-31 | 2021-03-04 | 엘지전자 주식회사 | Prof를 수행하는 영상 부호화/복호화 방법, 장치 및 비트스트림을 전송하는 방법 |
| US20230093043A1 (en) * | 2021-09-22 | 2023-03-23 | Tencent America LLC | Method and apparatus for adaptive reordering for reference frames |
| WO2023085704A1 (ko) * | 2021-11-09 | 2023-05-19 | 삼성전자 주식회사 | 비디오 복호화 방법, 비디오 복호화 장치, 비디오 부호화 방법, 및 비디오 부호화 장치 |
| WO2023195824A1 (ko) * | 2022-04-08 | 2023-10-12 | 한국전자통신연구원 | 영상 부호화/복호화를 위한 방법, 장치 및 기록 매체 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120009861A (ko) * | 2010-07-22 | 2012-02-02 | 에스케이 텔레콤주식회사 | 확장된 스킵모드를 이용한 영상 부호화/복호화 방법 및 장치 |
| CN103828364B (zh) | 2011-09-29 | 2018-06-12 | 夏普株式会社 | 图像解码装置、图像解码方法及图像编码装置 |
| WO2013047805A1 (ja) * | 2011-09-29 | 2013-04-04 | シャープ株式会社 | 画像復号装置、画像復号方法および画像符号化装置 |
| PL3742735T3 (pl) * | 2011-10-19 | 2022-11-14 | Sun Patent Trust | Sposób kodowania obrazów, sposób dekodowania obrazów, urządzenie do kodowania obrazów, urządzenie do dekodowania obrazów, i urządzenie do kodowania i dekodowania obrazów |
| US10499068B2 (en) * | 2014-12-31 | 2019-12-03 | Nokia Technologies Oy | Apparatus, a method and a computer program for video coding and decoding |
| US20180249172A1 (en) * | 2015-09-02 | 2018-08-30 | Mediatek Inc. | Method and apparatus of motion compensation for video coding based on bi prediction optical flow techniques |
| US10375413B2 (en) * | 2015-09-28 | 2019-08-06 | Qualcomm Incorporated | Bi-directional optical flow for video coding |
| CN114466193A (zh) * | 2016-03-16 | 2022-05-10 | 联发科技股份有限公司 | 视频编码的样式基础的运动向量推导之方法及装置 |
| KR20180129860A (ko) * | 2016-04-25 | 2018-12-05 | 엘지전자 주식회사 | 영상 코딩 시스템에서 인터 예측 방법 및 장치 |
| CN105847804B (zh) * | 2016-05-18 | 2017-12-15 | 信阳师范学院 | 一种基于稀疏冗余表示模型的视频帧率上转换方法 |
| US10284845B2 (en) * | 2016-05-25 | 2019-05-07 | Arris Enterprises Llc | JVET quadtree plus binary tree (QTBT) structure with multiple asymmetrical partitioning |
| US10931969B2 (en) * | 2017-01-04 | 2021-02-23 | Qualcomm Incorporated | Motion vector reconstructions for bi-directional optical flow (BIO) |
| US10701366B2 (en) * | 2017-02-21 | 2020-06-30 | Qualcomm Incorporated | Deriving motion vector information at a video decoder |
| CN116684616A (zh) * | 2017-11-28 | 2023-09-01 | Lx 半导体科技有限公司 | 图像编码/解码方法、图像数据的传输方法和存储介质 |
-
2018
- 2018-12-13 WO PCT/KR2018/015818 patent/WO2019117640A1/ko unknown
- 2018-12-13 KR KR1020207016731A patent/KR102305966B1/ko active IP Right Grant
- 2018-12-13 KR KR1020227021524A patent/KR102523002B1/ko active IP Right Grant
- 2018-12-13 US US16/772,645 patent/US11647221B2/en active Active
- 2018-12-13 MX MX2020006250A patent/MX2020006250A/es unknown
- 2018-12-13 KR KR1020217030250A patent/KR102414180B1/ko active IP Right Grant
- 2018-12-13 JP JP2020532599A patent/JP7366901B2/ja active Active
- 2018-12-13 KR KR1020237012639A patent/KR102638336B1/ko active IP Right Grant
- 2018-12-13 CN CN201880085985.9A patent/CN111630859B/zh active Active
- 2018-12-13 KR KR1020247005201A patent/KR20240025058A/ko active Application Filing
- 2018-12-13 EP EP18888849.9A patent/EP3713236A4/en not_active Ceased
-
2023
- 2023-03-30 US US18/128,757 patent/US20230239492A1/en active Pending
- 2023-07-13 JP JP2023115243A patent/JP2023134651A/ja active Pending
Non-Patent Citations (1)
| Title |
|---|
| Jianle Chen, et., al., "Algorithm Description of Joint Exploration Test Model 4", Joint Video Exploration Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11, 4th Meeting: Chengdu, CN, 15-21* * |
Also Published As
| Publication number | Publication date |
|---|---|
| MX2020006250A (es) | 2020-09-25 |
| WO2019117640A1 (ko) | 2019-06-20 |
| KR102523002B1 (ko) | 2023-04-18 |
| KR20240025058A (ko) | 2024-02-26 |
| US20230239492A1 (en) | 2023-07-27 |
| CN111630859B (zh) | 2024-04-16 |
| KR20220093394A (ko) | 2022-07-05 |
| JP2023134651A (ja) | 2023-09-27 |
| EP3713236A4 (en) | 2021-04-21 |
| KR102638336B1 (ko) | 2024-02-19 |
| KR102414180B1 (ko) | 2022-06-28 |
| US11647221B2 (en) | 2023-05-09 |
| JP2021507589A (ja) | 2021-02-22 |
| EP3713236A1 (en) | 2020-09-23 |
| CN111630859A (zh) | 2020-09-04 |
| KR20210118254A (ko) | 2021-09-29 |
| US20200314444A1 (en) | 2020-10-01 |
| JP7366901B2 (ja) | 2023-10-23 |
| KR20230057473A (ko) | 2023-04-28 |
| KR102305966B1 (ko) | 2021-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102305966B1 (ko) | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 | |
| KR102387363B1 (ko) | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 | |
| KR20210100196A (ko) | Dmvr 기반의 인터 예측 방법 및 장치 | |
| US11516475B2 (en) | Image encoding/decoding method and device for performing PROF, and method for transmitting bitstream | |
| KR102592642B1 (ko) | 영상 코딩 시스템에서 어파인 움직임 예측에 기반한 영상 디코딩 방법 및 장치 | |
| US11785248B2 (en) | Affine motion prediction-based image decoding method and device using affine merge candidate list in image coding system | |
| US20230179794A1 (en) | Image decoding method and apparatus based on motion prediction using merge candidate list in image coding system | |
| KR102553665B1 (ko) | 비디오 코딩 시스템에서 인터 예측 방법 및 장치 | |
| US20240171749A1 (en) | Image encoding/decoding method and device for performing prof, and method for transmitting bitstream | |
| CN114303375A (zh) | 使用双向预测的视频解码方法和用于该方法的装置 | |
| US11924460B2 (en) | Image decoding method and device on basis of affine motion prediction using constructed affine MVP candidate in image coding system | |
| KR102513585B1 (ko) | 비디오 처리 시스템에서 인터 예측 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| A107 | Divisional application of patent | ||
| GRNT | Written decision to grant |