KR20200034029A - Apparatus for autonomous driving vehicle, system having the same and method thereof - Google Patents
Apparatus for autonomous driving vehicle, system having the same and method thereof Download PDFInfo
- Publication number
- KR20200034029A KR20200034029A KR1020180109698A KR20180109698A KR20200034029A KR 20200034029 A KR20200034029 A KR 20200034029A KR 1020180109698 A KR1020180109698 A KR 1020180109698A KR 20180109698 A KR20180109698 A KR 20180109698A KR 20200034029 A KR20200034029 A KR 20200034029A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- group
- autonomous driving
- vehicles
- driving control
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 56
- 238000004891 communication Methods 0.000 claims description 57
- 239000011159 matrix material Substances 0.000 claims description 15
- 230000005856 abnormality Effects 0.000 claims description 4
- 230000002708 enhancing effect Effects 0.000 abstract description 4
- 238000005516 engineering process Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 229920001621 AMOLED Polymers 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 101001093748 Homo sapiens Phosphatidylinositol N-acetylglucosaminyltransferase subunit P Proteins 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/165—Automatically following the path of a preceding lead vehicle, e.g. "electronic tow-bar"
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0289—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling with means for avoiding collisions between vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/22—Platooning, i.e. convoy of communicating vehicles
Abstract
Description
본 발명은 자율 주행 제어 장치, 그를 포함한 시스템 및 그 방법에 관한 것으로, 보다 상세하게는 블록 체인 방식을 기반으로 자율 주행 차량의 보안을 강화할 수 있는 기술에 관한 것이다.The present invention relates to an autonomous driving control device, a system including the same and a method thereof, and more particularly, to a technology capable of enhancing security of an autonomous driving vehicle based on a blockchain method.
최근 운전자가 직접 운전하지 않고 자율 주행 시스템에 의해 차량이 자동으로 주행되는 기술이 각광받고 있다. 이러한 차량 자율주행 시스템이란 스스로 도로 환경을 인식하고, 주행상황을 판단하여, 계획된 주행 경로에 따라 차량을 제어함으로써 자동으로 주어진 목적지까지 주행하는 시스템을 말한다. 2. Description of the Related Art Recently, a technology in which a vehicle is automatically driven by an autonomous driving system without driving directly by the driver has been spotlighted. Such a vehicle autonomous driving system refers to a system that automatically recognizes the road environment, determines the driving situation, and automatically controls the vehicle according to the planned driving route to automatically drive to a given destination.
이러한 자율 주행 차량은 해킹이나 기록 조작에 취약하다는 단점이 있다. 자율주행 중, 외부에서 해킹을 시도하여 차량 움직임을 조작한다면 바로 사고로 이어질 수 있다는 위험이 있기 때문에 이러한 해킹에 대한 확실한 대응책이 필요하다.Such autonomous vehicles have the disadvantage of being vulnerable to hacking or record manipulation. During autonomous driving, there is a risk that an attempt to hack from outside to manipulate a vehicle's movements can lead to an accident immediately, so a clear countermeasure against this hack is necessary.
또한, 만약 자율주행차량이 어떠한 이유로 사고가 발생했을 때, 차량의 기록을 조작해서 차량 제어 오류로 사고가 발생한 것처럼 위장이 가능하거나 사고 상대차량의 기록을 조작하면 상대방의 실수로 사고가 발생한 것처럼 위장이 가능하다는 문제점이 있다. In addition, if an autonomous vehicle has an accident for some reason, it is possible to camouflage as if an accident occurred due to a vehicle control error by manipulating the record of the vehicle, or if you manipulate the record of the accident vehicle, the camouflage may occur as if the other party accidentally occurred. There is a problem that this is possible.
본 발명의 실시 예는 블록 체인 방식을 기반으로 그룹화하여 자율 주행 차량의 보안을 강화할 수 있는 자율 주행 제어 장치, 그를 포함한 시스템 및 그 방법을 제공하고자 한다.An embodiment of the present invention is to provide an autonomous driving control device, a system including the same, and a method for enhancing the security of an autonomous driving vehicle by grouping based on a blockchain method.
또한, 본 발명의 실시 예는 그룹화된 차량 내 차량 통신 대표를 가변화하여 자율 주행 차량의 보안을 강화할 수 있는 자율 주행 제어 장치, 그를 포함한 시스템 및 그 방법을 제공하고자 한다.In addition, an embodiment of the present invention is to provide an autonomous driving control device, a system including the same, and a method thereof, which can enhance security of an autonomous driving vehicle by changing a vehicle communication representative in a grouped vehicle.
본 발명의 기술적 과제들은 이상에서 언급한 기술적 과제들로 제한되지 않으며, 언급되지 않은 또 다른 기술적 과제들은 아래의 기재들로부터 당업자에게 명확하게 이해될 수 있을 것이다.The technical problems of the present invention are not limited to the technical problems mentioned above, and other technical problems not mentioned will be clearly understood by those skilled in the art from the following descriptions.
본 발명의 실시예에 따른 자율 주행 제어 장치는 복수의 자율 주행 차량을 그룹화하여 적어도 하나 이상의 그룹을 생성하고, 각 그룹 내의 복수의 자율 주행 차량 각각의 차량 정보를 상기 각 그룹 내의 복수의 자율 주행 차량 간에 공유하는 프로세서; 및 상기 프로세서에 의해 그룹화된 정보 및 상기 공유된 정보를 저장하는 저장부;를 포함할 수 있다. An autonomous driving control apparatus according to an embodiment of the present invention groups a plurality of autonomous driving vehicles to generate at least one group, and a plurality of autonomous driving vehicles in each group of vehicle information of each of the plurality of autonomous driving vehicles in each group. A processor shared between them; And a storage unit that stores information grouped by the processor and the shared information.
일 실시 예에 있어서, 상기 프로세서는, 블록체인(blockchain) 방식을 기반으로 상기 복수의 자율 주행 차량을 그룹화하는 것을 포함할 수 있다. In one embodiment, the processor may include grouping the plurality of autonomous vehicles based on a blockchain method.
일 실시 예에 있어서, 상기 프로세서는, 상기 적어도 하나 이상의 그룹 중 In one embodiment, the processor, among the at least one or more groups
제 1 그룹과 제 2 그룹을 포함하는 제 3그룹을 신규 생성하는 것을 포함할 수 있다. It may include creating a third group including the first group and the second group.
일 실시 예에 있어서, 상기 프로세서는, 미리 정한 비율에 따라, 상기 제 1 그룹에 포함된 차량의 일부와 상기 제 2 그룹에 포함된 차량의 일부를 포함하는 상기 제 3 그룹을 생성하는 것을 포함할 수 있다. In one embodiment, the processor may include generating the third group including a portion of the vehicle included in the first group and a portion of the vehicle included in the second group, according to a predetermined ratio. You can.
일 실시 예에 있어서, 상기 프로세서는, 자차가 주행 중인 경우, 자차의 주변을 주행하는 주변 차량 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행하는 것을 포함할 수 있다. In one embodiment, the processor may include, when the host vehicle is driving, performing grouping with the surrounding vehicle having a similar driving direction and destination to the host vehicle among the surrounding vehicles traveling around the host vehicle.
일 실시 예에 있어서, 상기 프로세서는, 상기 자차를 기준으로 매트릭스 방식으로 주변 차량과 그룹화를 수행하는 것을 포함할 수 있다. In one embodiment, the processor may include performing grouping with surrounding vehicles in a matrix manner based on the host vehicle.
일 실시 예에 있어서, 상기 프로세서는, 상기 자차가 주행 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행할 때, 자차를 포함하는 복수개의 그룹을 생성할 수 있는 것을 포함할 수 있다. In one embodiment, the processor may include generating a plurality of groups including the own vehicle when the own vehicle performs grouping with the surrounding vehicle having a similar driving direction and destination while the own vehicle is traveling.
일 실시 예에 있어서, 상기 프로세서는, 상기 그룹화된 그룹 내의 차량들 간에 차량 주행 정보를 공유하는 것을 포함할 수 있다. In one embodiment, the processor may include sharing vehicle driving information between vehicles in the grouped group.
일 실시 예에 있어서, 상기 프로세서는, 상기 그룹화된 그룹 내의 차량들 중 통신 이상이 발생한 차량이 존재하는 경우, 상기 통신 이상이 발생한 차량으로 페일 세이프티 모드(fail safety mode)로의 진입을 요청하는 것을 포함할 수 있다. In one embodiment, the processor includes requesting entry into a fail safety mode to a vehicle in which a communication error occurs, among vehicles in the grouped group, when a communication error occurs. can do.
일 실시 예에 있어서, 상기 프로세서는, 타 차량으로부터 상기 페일 세이프티 모드로의 진입을 요청받으면, 상기 페일 세이프티 모드로 진입 후, 상기 타 차량으로부터 공유된 차량 주행 정보를 기반으로 자율 주행 제어를 계속하는 것을 포함할 수 있다. In one embodiment, when the processor is requested to enter the fail-safe mode from another vehicle, after entering the fail-safe mode, the processor continues autonomous driving control based on the vehicle driving information shared from the other vehicle It may include.
일 실시 예에 있어서, 상기 프로세서는, 자차의 통신 이상을 발견한 경우, 자차를 페일 세이프티 모드로 진입시키고, 공유한 주변 차량의 차량 주행 정보를 기반으로 자율 주행 제어를 계속하는 것을 포함할 수 있다. In one embodiment, the processor may include entering the own vehicle into the fail-safe mode when the communication abnormality of the host vehicle is found, and continuing autonomous driving control based on the shared vehicle driving information of the surrounding vehicle. .
일 실시 예에 있어서, 상기 프로세서는, 상기 적어도 하나 이상의 그룹 중 하나의 그룹 내의 복수의 자율 주행 차량 중 자차가 외부와 통신을 수행하는 메인 통신 차량으로 지정되면, 외부와의 통신 데이터를 상기 자차와 그룹화 되어 있는 주변 차량들에게 전달하는 것을 포함할 수 있다. In one embodiment, the processor, when the host vehicle among a plurality of autonomous vehicles in one of the at least one group is designated as a main communication vehicle that communicates with the outside, communicates data with the outside to the host vehicle This may include delivering to grouped nearby vehicles.
일 실시 예에 있어서, 상기 프로세서는, 미리 정한 주기에 따라 상기 자차와 그룹화 되어 있는 주변 차량들을 상기 메인 통신 차량으로 순차적으로 변경 지정하는 것을 포함할 수 있다. In one embodiment, the processor may include sequentially designating surrounding vehicles grouped with the host vehicle as the main communication vehicle according to a predetermined period.
일 실시 예에 있어서, 상기 프로세서는, 차량 출고 시 복수의 자율 주행 차량을 그룹화하여 적어도 하나 이상의 그룹을 생성하는 것을 포함할 수 있다. In one embodiment, the processor may include generating at least one group by grouping a plurality of autonomous vehicles when the vehicle is shipped.
본 발명의 실시예에 따른 차량 시스템은 복수의 자율 주행 차량을 그룹화하여 적어도 하나 이상의 그룹을 생성하고, 각 그룹 내의 복수의 자율 주행 차량 각각의 차량 정보를 상기 각 그룹 내의 복수의 자율 주행 차량 간에 공유하는 자율 주행 제어 장치; 및 상기 각 그룹 내의 복수의 자율 주행 차량 간에 통신을 수행하는 통신 모듈;을 포함할 수 있다.A vehicle system according to an embodiment of the present invention groups a plurality of autonomous vehicles to generate at least one group, and shares vehicle information of each of a plurality of autonomous vehicles in each group among a plurality of autonomous vehicles in each group. An autonomous driving control device; And a communication module that performs communication between a plurality of autonomous vehicles in each group.
본 발명의 실시예에 따른 자율 주행 제어 방법은 복수의 자율 주행 차량을 그룹화하여 적어도 하나 이상의 그룹을 생성하는 단계; 및 각 그룹 내의 복수의 자율 주행 차량 각각의 차량 정보를 상기 각 그룹 내의 복수의 자율 주행 차량 간에 공유하는 단계;를 포함할 수 있다. An autonomous driving control method according to an embodiment of the present invention includes the steps of grouping a plurality of autonomous driving vehicles to generate at least one group; And sharing vehicle information of each of a plurality of autonomous vehicles in each group among a plurality of autonomous vehicles in each group.
일 실시 예에 있어서, 상기 적어도 하나 이상의 그룹을 생성하는 단계는, 블록체인(blockchain) 방식을 기반으로 상기 복수의 자율 주행 차량을 그룹화하는 것을 포함할 수 있다. In an embodiment, the step of generating the at least one group may include grouping the plurality of autonomous vehicles based on a blockchain method.
일 실시 예에 있어서, 상기 적어도 하나 이상의 그룹을 생성하는 단계는, 상기 적어도 하나 이상의 그룹 중 제 1 그룹과 제 2 그룹을 포함하는 제 3그룹을 신규 생성하고, 미리 정한 비율에 따라, 상기 제 1 그룹에 포함된 차량의 일부와 상기 제 2 그룹에 포함된 차량의 일부를 포함하는 상기 제 3 그룹을 생성하는 것을 포함할 수 있다. In one embodiment, the step of generating the at least one or more groups includes: generating a third group including the first group and the second group among the at least one or more groups, and according to a predetermined ratio, the first And generating the third group including a part of the vehicle included in the group and a part of the vehicle included in the second group.
일 실시 예에 있어서, 상기 적어도 하나 이상의 그룹을 생성하는 단계는, 자차가 주행 중인 경우, 상기 자차의 주변을 주행하는 주변 차량 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행하는 것을 포함할 수 있다. In one embodiment, the step of generating the at least one or more groups includes, when the host vehicle is driving, performing grouping with a surrounding vehicle having a similar driving direction and a destination among the surrounding vehicles traveling around the host vehicle. can do.
일 실시 예에 있어서, 상기 적어도 하나 이상의 그룹을 생성하는 단계는, In one embodiment, the step of generating the at least one group,
상기 자차를 기준으로 매트릭스 방식으로 주변 차량과 그룹화를 수행하는 것을 포함할 수 있다. It may include performing grouping with surrounding vehicles in a matrix manner based on the host vehicle.
일 실시 예에 있어서, 상기 적어도 하나 이상의 그룹을 생성하는 단계는, 상기 자차가 주행 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행할 때, 자차를 포함하는 복수개의 그룹을 생성하는 것을 포함할 수 있다. In one embodiment, the step of generating the at least one or more groups may include generating a plurality of groups including the own vehicle when the own vehicle performs grouping with the surrounding vehicle having a similar driving direction and destination while the own vehicle is driving. It can contain.
일 실시 예에 있어서, 상기 그룹화된 그룹 내의 차량들 중 통신 이상이 발생한 차량이 존재하는 경우, 상기 통신 이상이 발생한 차량으로 페일 세이프티 모드(fail safety mode)로의 진입을 요청하는 단계;를 더 포함할 수 있다. In one embodiment, if there is a vehicle in which communication failure occurs among vehicles in the grouped group, requesting entry into a fail safety mode to the vehicle in which the communication failure occurs; You can.
일 실시 예에 있어서, 타 차량으로부터 상기 페일 세이프티 모드로의 진입을 요청받으면, 상기 페일 세이프티 모드로 진입 후, 상기 타 차량으로부터 공유된 차량 주행 정보를 기반으로 자율 주행 제어를 계속하는 단계를 더 포함할 수 있다. In one embodiment, when requested to enter the fail-safe mode from another vehicle, after entering the fail-safe mode, further comprising the step of continuing autonomous driving control based on the vehicle driving information shared from the other vehicle can do.
본 기술은 블록 체인 방식을 기반으로 그룹화하고 그룹화된 자율 주행 차량 간의 차량 주행 정보를 공유함으로써 자율 주행 차량의 보안을 강화할 수 있다. This technology can enhance the security of autonomous vehicles by grouping and sharing vehicle driving information between grouped autonomous vehicles based on the blockchain method.
또한 본 기술은 그룹화된 차량 내 차량 통신 대표를 가변화하여 자율 주행 차량의 보안을 강화할 수 있다. In addition, the present technology can enhance the security of autonomous vehicles by changing the vehicle communication representative in the grouped vehicle.
이 외에, 본 문서를 통해 직접적 또는 간접적으로 파악되는 다양한 효과들이 제공될 수 있다.In addition, various effects that can be directly or indirectly identified through this document may be provided.
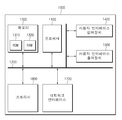
도 1은 본 발명의 일 실시 예에 따른 자율 주행 제어 장치를 포함한 차량 시스템의 구성을 나타내는 블록도이다.
도 2는 본 발명의 일 실시 예에 따른 자율 주행 제어 장치의 주행 중 그룹화 과정을 설명하기 위한 도면이다.
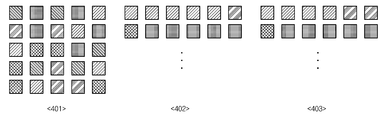
도 3은 본 발명의 일 실시 예에 따른 매트릭스 방식의 그룹화의 예시도이다.
도 4는 본 발명의 일 실시 예에 따른 자율 주행 제어 장치에 의해 복수개의 그룹화가 생성되는 예시도이다.
도 5는 본 발명의 일 실시 예에 따른 자율 주행 제어 장치의 출고 시 그룹화 예시도이다.
도 6은 본 발명의 일 실시 예에 따른 복수개의 그룹을 재그룹화한 예시도이다.
도 7은 본 발명의 일 실시 예에 따른 복수개의 그룹을 재그룹화하는 방법을 설명하기 위한 도면이다.
도 8은 본 발명의 다른 실시 예에 따른 그룹화된 차량간의 차량 통신의 가변 방법을 설명하기 위한 도면이다.
도 9는 본 발명의 일 실시 예에 따른 블록체인 방식 기반 자율 주행 제어 방법을 설명하기 위한 순서도이다.
도 10은 본 발명의 일 실시 예에 따른 컴퓨팅 시스템을 도시한다.1 is a block diagram showing a configuration of a vehicle system including an autonomous driving control device according to an embodiment of the present invention.
2 is a view for explaining a grouping process during driving of the autonomous driving control apparatus according to an embodiment of the present invention.
3 is an exemplary diagram of grouping in a matrix method according to an embodiment of the present invention.
4 is an exemplary view in which a plurality of groupings are generated by an autonomous driving control device according to an embodiment of the present invention.
5 is an exemplary grouping at the time of shipment of the autonomous driving control device according to an embodiment of the present invention.
6 is an exemplary diagram of regrouping a plurality of groups according to an embodiment of the present invention.
7 is a view for explaining a method of regrouping a plurality of groups according to an embodiment of the present invention.
8 is a view for explaining a variable method of vehicle communication between grouped vehicles according to another embodiment of the present invention.
9 is a flowchart illustrating a method for autonomous driving control based on a blockchain method according to an embodiment of the present invention.
10 illustrates a computing system according to an embodiment of the present invention.
이하, 본 발명의 일부 실시 예들을 예시적인 도면을 통해 상세하게 설명한다. 각 도면의 구성요소들에 참조부호를 부가함에 있어서, 동일한 구성요소들에 대해서는 비록 다른 도면상에 표시되더라도 가능한 한 동일한 부호를 가지도록 하고 있음에 유의해야 한다. 또한, 본 발명의 실시 예를 설명함에 있어, 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 발명의 실시 예에 대한 이해를 방해한다고 판단되는 경우에는 그 상세한 설명은 생략한다.Hereinafter, some embodiments of the present invention will be described in detail through exemplary drawings. It should be noted that in adding reference numerals to the components of each drawing, the same components have the same reference numerals as possible even though they are displayed on different drawings. In addition, in describing embodiments of the present invention, when it is determined that detailed descriptions of related well-known configurations or functions interfere with understanding of the embodiments of the present invention, detailed descriptions thereof will be omitted.
본 발명의 실시 예의 구성 요소를 설명하는 데 있어서, 제 1, 제 2, A, B, (a), (b) 등의 용어를 사용할 수 있다. 이러한 용어는 그 구성 요소를 다른 구성 요소와 구별하기 위한 것일 뿐, 그 용어에 의해 해당 구성 요소의 본질이나 차례 또는 순서 등이 한정되지 않는다. 또한, 다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 가진다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥상 가지는 의미와 일치하는 의미를 가진 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.In describing the components of the embodiments of the present invention, terms such as first, second, A, B, (a), and (b) may be used. These terms are only for distinguishing the component from other components, and the nature, order, or order of the component is not limited by the term. Also, unless defined otherwise, all terms used herein, including technical or scientific terms, have the same meaning as commonly understood by a person skilled in the art to which the present invention pertains. Terms, such as those defined in a commonly used dictionary, should be interpreted as having meanings consistent with meanings in the context of related technologies, and should not be interpreted as ideal or excessively formal meanings unless explicitly defined in the present application. Does not.
이하, 도 1 내지 도 10을 참조하여, 본 발명의 실시 예들을 구체적으로 설명하기로 한다.Hereinafter, embodiments of the present invention will be described in detail with reference to FIGS. 1 to 10.
도 1은 본 발명의 일 실시 예에 따른 자율 주행 제어 장치를 포함한 차량 시스템의 구성을 나타내는 블록도이다. 1 is a block diagram showing a configuration of a vehicle system including an autonomous driving control device according to an embodiment of the present invention.
도 1을 참조하면, 본 발명의 일 실시 예에 따른 차량 시스템은 자율 주행 제어 장치(100), 통신 모듈(200), 센서 모듈(300), 네비게이션 장치(400), 제동장치(500), 및 조향 장치(600)를 포함할 수 있다. 이러한 차량 시스템의 각 구성은 차량에 탑재될 수 있다.Referring to FIG. 1, a vehicle system according to an embodiment of the present invention includes an autonomous driving control device 100, a communication module 200, a
통신 모듈(200)은 차량 내 통신부(110)와 통신을 수행하거나 차량 외부의 외부정보 송수신 장치(미도시) 또는 주변 차량과 무선망을 통해 통신을 수행할 수 있다. 통신 모듈(220)은 무선 또는 유선 연결을 통해 신호를 송신 및 수신하기 위해 다양한 전자 회로로 구현되는 하드웨어 장치로 구현될 수 있다. 또한, 통신 모듈(220)은 외부 인프라 정보 송신장치(미도시)로부터 무선망을 통해 수신한 외부의 정보를 차량 내부의 자율 주행 제어 장치(100)에 전달할 수 있다. 무선망 기술로는 WAVE/DSRC 와 같은 근거리 통신 기술뿐만 아니라 3G/LTE등의 통신 기술도 사용될 수 있다. 이때, 외부 정보 송수신 장치(미도시)는 외부 차량의 정보를 송수신하는 장치로 V2X 통신 사양에 따라 송수신을 수행하며, V2X와 관련된 데이터의 송수신을 처리할 수 있는 단말을 통칭하며, 외부 인프라나 외부 차량에 포함될 수 있다.The communication module 200 may perform communication with the
센서 모듈(300)은 외부 물체의 위치, 외부 물체의 속도, 외부 물체의 이동 방향 및/또는 외부 물체의 종류(예: 차량, 보행자, 자전거 또는 모터사이클 등)에 대한 정보를 획득할 수 있다.The
네비게이션 장치(400)는 목적지에 따른 주행 경로 정보, 주행 방향 정보 등을 자율 주행 제어 장치(100)로 제공할 수 있다.The navigation device 400 may provide driving route information and driving direction information according to a destination to the autonomous driving control device 100.
제동장치(500)는 차량의 제동을 수행하는 장치로, 자율 주행 제어 장치(100)에 의해 제어되어 구동된다. The
조향 장치(600)는 차량의 조향을 구동하는 장치로, 자율 주행 제어 장치(100)에 의해 제어되어 구동된다. The
센서 모듈(300), 네비게이션 장치(400), 제동 장치(500), 조향 장치(600) 등은 자율 주행 제어를 위해 필요한 일반적인 구성에 해당할 수 있다. The
자율 주행 제어 장치(100)는 블록체인(blockchain) 방식을 기반으로 복수의 자율 주행 차량을 그룹화하여 적어도 하나 이상의 그룹을 생성하고, 각 그룹 내의 복수의 자율 주행 차량 각각의 차량 정보를 각 그룹 내의 복수의 자율 주행 차량 간에 공유할 수 있다. 이때, 블록체인은 네트워크에 참여하는 모든 오브젝트가 관리 대상이 되는 모든 데이터를 분산하여 저장하는 데이터 분산 처리 기술로서, 본 발명에서는 차량을 대상으로 하여 차량 주행 정보를 분산하여 공유함으로써 차량 주행 정보의 오류나 삭제 등을 방지로 인한 피해를 방지할 수 있다. 이때, 차량 정보는 차량 주행 정보 등을 포함할 수 있다. 이때, 차량 주행 정보는 차량 주행 방향, 차속 정보, 악셀 및 브레이크 신호 정보, 주행 경로, 목적지 정보, 주행 방향 등을 포함할 수 있다.The autonomous driving control device 100 groups a plurality of autonomous driving vehicles based on a block chain method to generate at least one group, and the vehicle information of each of the plurality of autonomous driving vehicles in each group is plural in each group. Let's share between autonomous vehicles. At this time, the blockchain is a data distribution processing technology that distributes and stores all data to be managed by all objects participating in the network. In the present invention, vehicle driving information is distributed and shared by targeting the vehicle. It is possible to prevent damage caused by preventing deletion or the like. At this time, the vehicle information may include vehicle driving information. At this time, the vehicle driving information may include vehicle driving direction, vehicle speed information, accelerator and brake signal information, driving route, destination information, driving direction, and the like.
이를 위해, 자율 주행 제어 장치(100)는 통신부(110), 저장부(120), 및 프로세서(140)를 포함할 수 있다.To this end, the autonomous driving control device 100 may include a
통신부(110)는 무선 또는 유선 연결을 통해 신호를 송신 및 수신하기 위해 다양한 전자 회로로 구현되는 하드웨어 장치로서, 본 발명에서는 캔(can) 통신 등을 통해 차량 내 통신을 수행하며, 통신 모듈(200), 센서모듈(300), 네비게이션 장치(400), 제동 장치(500), 조향 장치(600) 등과 통신을 수행할 수 있다.The
저장부(120)는 프로세서(140)에 의해 획득된 그룹화 정보, 차량간 통신을 통해 공유된 정보 등을 저장할 수 있다.The
저장부(120)는 플래시 메모리 타입(flash memory type), 하드디스크 타입(hard disk type), 마이크로 타입(micro type), 및 카드 타입(예컨대, SD 카드(Secure Digital Card) 또는 XD 카드(eXtream Digital Card)) 등의 메모리와, 램(RAM, Random Access Memory), SRAM(Static RAM), 롬(ROM, Read-Only Memory), PROM(Programmable ROM), EEPROM(Electrically Erasable PROM), 자기 메모리(MRAM, Magnetic RAM), 자기 디스크(magnetic disk), 및 광디스크(optical disk) 타입의 메모리 중 적어도 하나의 타입의 기록 매체(storage medium)를 포함할 수 있다.The
표시부(130)는 자차와 그룹핑된 차량들의 정보를 표시할 수 있다. 이때, 표시부(130)는 개인 정보 보호를 위해 그룹핑된 차량들을 차량메이커 정보만 표시할 수 있다. 표시부(130)는 헤드업 디스플레이(HUD), 클러스터, AVN(Audio Video Navigation) 등으로 구현될 수 있다. 또한, 클러스터의 USM(User Setting Menu) 메뉴를 통해 사용자로부터 직접 색상 입력 등을 받을 수 있다. 또한, 표시부(130)는 액정 디스플레이(LCD, Liquid Crystal Display), 박막 트랜지스터 액정 디스플레이(TFT LCD, Thin Film Transistor-LCD), 발광 다이오드(LED, Light Emitting Diode), 유기 발광 다이오드(OLED, Organic LED), 능동형 OLED(AMOLED, Active Matrix OLED), 플렉서블 디스플레이(flexible display), 벤디드 디스플레이(bended display), 그리고 3차원 디스플레이(3D display) 중에서 적어도 하나를 포함할 수 있다. 이들 중 일부 디스플레이는 외부를 볼 수 있도록 투명형 또는 광투명형으로 구성되는 투명 디스플레이(transparent display)로 구현될 수 있다. 또한, 표시부(130)는 터치 패널을 포함하는 터치스크린(touchscreen)으로서 마련되어 출력 장치 이외에 입력 장치로도 사용될 수 있다. The
프로세서(140)는 통신부(110), 저장부(120), 및 표시부(130)와 전기적으로 연결될 수 있고, 각 구성들을 전기적으로 제어할 수 있으며, 소프트웨어의 명령을 실행하는 전기 회로가 될 수 있으며, 이에 의해 후술하는 다양한 데이터 처리 및 계산을 수행할 수 있다.The
프로세서(140)는 자차가 주행 중인 경우, 자차의 주변을 주행하는 주변 차량 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행할 수 있다. 이때, 프로세서(140)는 자차를 기준으로 매트릭스 방식으로 주변 차량과 그룹화를 수행할 수 있다. When the host vehicle is running, the
프로세서(140)는 주행중에 그룹화된 차량들은 동일한 속도 및 동일한 방향으로 주행을 할 수 있다. 또한, 프로세서(140)는 그룹화된 차량들이 주행 중에 외부와의 통신을 주기적으로 미리 정한 시간(짧은 시간)동안 단절시켜 해킹을 방지할 수 있다. 또한 프로세서(140)는 해킹 방지를 위해 그룹화된 차량을 수시로 변경시킬 수 있다.The
도 2는 본 발명의 일 실시 예에 따른 자율 주행 제어 장치의 주행 중 그룹화 과정을 설명하기 위한 도면이고, 도 3은 본 발명의 일 실시 예에 따른 매트릭스 방식의 그룹화의 예시도이며, 도 4는 본 발명의 일 실시 예에 따른 자율 주행 제어 장치에 의해 복수개의 그룹화가 생성되는 예시도이다.2 is a view for explaining a grouping process during driving of an autonomous driving control device according to an embodiment of the present invention, FIG. 3 is an exemplary view of grouping in a matrix method according to an embodiment of the present invention, and FIG. 4 is This is an exemplary diagram in which a plurality of groupings are generated by an autonomous driving control device according to an embodiment of the present invention.
도 2를 참조하면, 자율 주행 제어 장치(100)는 차량을 블록(사각형)으로 표시할 때, 자차(101)를 기준으로 인접한 주변의 차량을 매트릭스 방식으로 그룹화 할 수 있다. Referring to FIG. 2, when the autonomous driving control apparatus 100 displays a vehicle as a block (square), it is possible to group adjacent vehicles based on the
도 3을 참조하면, 자율 주행 제어 장치(100)는 301과 같이 3*3 매트릭스 방식으로 그룹화를 하거나, 302와 같이 3*5 매트릭스 방식으로 그룹화를 하거나, 303과 같이 5*5 매트릭스 방식으로 그룹화를 할 수 있으며, 그룹화의 크기는 필요에 따라 변경할 수 있다. 이때, 3*3 매트릭스 기반 등의 예시는 이에 한정되는 것이 아니고 매트릭스의 크기는 언제든지 변경될 수 있다.Referring to FIG. 3, the autonomous driving control device 100 may be grouped in a 3 * 3 matrix manner, such as 301, or in a 3 * 5 matrix manner, such as 302, or in a 5 * 5 matrix manner, such as 303 And the size of grouping can be changed as needed. At this time, examples such as 3 * 3 matrix based are not limited thereto, and the size of the matrix may be changed at any time.
도 4를 참조하면, 이미 그룹화된 그룹1의 차량 중 일부가 중복되게 그룹 2를 구성할 수 있으며, 그룹 2에 포함된 차량 중 일부가 그룹 3을 구성할 수 있도록 그룹화를 수행할 수 있다. 이처럼 복수개의 그룹이 고리처럼 연결될 수 있다. Referring to FIG. 4, group 2 may be configured such that some of the vehicles of group 1 already grouped overlap, and grouping may be performed such that some of the vehicles included in group 2 may constitute group 3. In this way, multiple groups can be connected like a ring.
또한, 프로세서(140)는 자차가 주행 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행할 때, 자차를 포함하는 복수개의 그룹을 생성할 수 있다. 프로세서(140)는 그룹화된 그룹 내의 차량들 간에 차량 주행 정보를 공유할 수 있고 그룹화된 그룹 내의 차량들 중 통신 이상이 발생한 차량이 존재하는 경우, 통신 이상이 발생한 차량으로 페일 세이프티 모드(fail safety mode)로의 진입을 요청할 수 있다. 이때, 페일 세이프티(fail-safety)는 차량 고장 및 오작동에 대비해 추가 장치나 시스템을 둬 안전주행을 유지할 수 있게 하는 기술이다. 자율주행 차량에서는 전자장치 비중이 높고, 운전자 없이 차량 스스로 처리해야 할 일이 많아 페일 세이프티 기술이 더욱 중요하다. In addition, the
프로세서(140)는 타 차량으로부터 페일 세이프티 모드로의 진입을 요청받으면, 페일 세이프티 모드로 진입 후, 타 차량으로부터 공유된 차량 주행 정보를 기반으로 자율 주행 제어를 계속할 수 있다. When the
또한, 프로세서(140)는 자차의 통신 이상을 발견한 경우, 자차를 페일 세이프티 모드로 진입시키고, 공유한 주변 차량의 차량 주행 정보를 기반으로 자율 주행 제어를 계속하할 수 있다. In addition, when the communication error of the host vehicle is found, the
이처럼 동일 목적지로 향하는 그룹화된 자율 주행 차량들의 프로세서(140)는 주행속도, 주행 방향, 주행 목적지 등의 차량 주행 정보를 서로 공유하고, 주기적으로 서로의 주행 정보를 계속 업데이트한다. 이에 프로세서(140)는 그룹 내 차량 중 하나 이상의 통신 이상 발생 시 공유되고 있던 타차량의 차량 주행 정보를 이용하여 자율 주행을 계속 안전하게 이어나갈 수 있도록 제어한다.As described above, the
프로세서(140)는 적어도 하나 이상의 그룹 중 제 1 그룹과 제 2 그룹을 포함하는 새로운 그룹을 신규 생성할 수 있고, 미리 정한 비율에 따라, 제 1 그룹에 포함된 차량의 일부와 제 2 그룹에 포함된 차량의 일부를 포함하는 신규 그룹을 생성할 수 있다. The
도 5는 본 발명의 일 실시 예에 따른 자율 주행 제어 장치의 출고 시 그룹화 예시도이고, 도 6은 본 발명의 일 실시 예에 따른 복수개의 그룹을 재그룹화한 예시도이며, 도 7은 본 발명의 일 실시 예에 따른 복수개의 그룹을 재그룹화하는 방법을 설명하기 위한 도면이다. 5 is an exemplary grouping at the time of shipment of an autonomous driving control device according to an embodiment of the present invention, FIG. 6 is an exemplary view of regrouping a plurality of groups according to an embodiment of the present invention, and FIG. 7 is an embodiment of the present invention A diagram for describing a method of regrouping a plurality of groups according to an embodiment of the present invention.
도 5를 참조하면, 자율 주행 제어 장치(100)는 출고되는 복수개의 차량을 임의로 랜덤하게 그룹화를 할 수 있다. 도 5에서는 그룹1, 그룹2, 그룹3, 그룹4, 그룹5의 총 5개의 그룹화를 수행한 예를 개시하고 있다.Referring to FIG. 5, the autonomous driving control apparatus 100 may randomly group a plurality of vehicles that are shipped. FIG. 5 discloses an example in which a total of five groupings of Group 1, Group 2, Group 3, Group 4, and Group 5 are performed.
도 6을 참조하면, 자율 주행 제어 장치(100)는 도 5에서 그룹화된 5개의 그룹을 서로 연결하여 새로운 그룹6, 그룹7, 그룹8을 생성할 수 있다. 즉 자율 주행 제어 장치(100)는 그룹1과 그룹3을 연결하여 그룹6을 구성하고, 그룹2와 그룹4를 연결하여 그룹7을 구성하고 그룹3과 그룹5를 연결하여 그룹8을 구성할 수 있다. 이에, 그룹6과 그룹8은 그룹3을 공통분모로 연결되어, 결국 그룹1, 그룹3, 그룹5, 그룹6, 그룹8은 중복되는 차량을 포함할 수 있다. 이처럼 복수개의 그룹을 연결하여 새로운 그룹을 생성함으로써 그룹이 확장되고, 이러한 확장으로 차량 정보를 공유하는 그룹이 확대될 수 있다. 또한 출고되는 차량들이 서로의 정보를 저장해둠으로써 추후 차량 정보 조작 등의 문제가 발생하는 경우 다른 차량에 저장되어 있는 자차의 정보를 이용하여 차량 정보 조작 여부를 판별할 수 있도록 한다. 또한, 자율 주행 제어 장치(100)는 그룹화된 차량들의 통신 신호값을 주기적으로 감시하여 해킹이 발생하였는지를 판단할 수 있다. Referring to FIG. 6, the autonomous driving control apparatus 100 may connect the five groups grouped in FIG. 5 to each other to generate new groups 6, 7 and 8. That is, the autonomous driving control device 100 may configure group 6 by connecting group 1 and group 3, group 7 by connecting group 2 and group 4, and group 8 by connecting group 3 and group 5. have. Accordingly, the group 6 and the group 8 are connected to the common denominator of the group 3, so that the group 1, the group 3, the group 5, the group 6, the group 8 may include overlapping vehicles. As such, a group is expanded by connecting a plurality of groups to create a new group, and the group sharing vehicle information can be expanded by the expansion. In addition, by storing the information of each other, the vehicle is released so that it is possible to determine whether to operate the vehicle information by using the information of the own vehicle stored in another vehicle when a problem such as manipulation of the vehicle information occurs later. In addition, the autonomous driving control apparatus 100 may periodically monitor the communication signal values of the grouped vehicles to determine whether hacking has occurred.
도 7을 참조하면, 401은 도 5에서와 같이 5개의 그룹을 생성한 예를 개시하고, 402에서는 -1 방식으로 그룹 1과 그룹3을 연결하여 그룹 6을 만드는 방식으로서, 그룹 1의 4대의 차량과 그룹 3의 1대의 차량을 그룹화하는 예를 개시한다. 403에서는 -2 방식으로 그룹 1과 그룹3을 연결하여 그룹 6을 생성할 때, 그룹 1의 3대의 차량과 그룹 3의 2 대의 차량을 그룹화하는 예를 개시한다. 이처럼 기존 그룹들을 이용하여 신규 그룹을 생성함으로써 무한대로 그룹을 생성할 수 있다. Referring to FIG. 7, 401 discloses an example in which five groups are generated as in FIG. 5, and in 402, group 1 and group 3 are connected to form group 6 to form group 6. An example of grouping a vehicle and one vehicle of group 3 is disclosed. 403 discloses an example of grouping three vehicles of Group 1 and two vehicles of Group 3 when Group 1 and Group 3 are connected in a -2 manner to generate Group 6. In this way, groups can be created infinitely by creating a new group using existing groups.
프로세서(140)는 적어도 하나 이상의 그룹 중 하나의 그룹 내의 복수의 자율 주행 차량 중 자차가 외부와 통신을 수행하는 메인 통신 차량으로 지정되면, The
외부와의 통신 데이터를 상기 자차와 그룹화 되어 있는 주변 차량들에게 전달할 수 있다. 또한 프로세서(140)는 미리 정한 주기에 따라 자차와 그룹화 되어 있는 주변 차량들을 메인 통신 차량으로 순차적으로 변경 지정할 수 있다. Communication data with the outside can be transmitted to surrounding vehicles grouped with the host vehicle. In addition, the
이처럼 차량 출고 시 그룹화를 수행하여 다른 차량이 차량 정보를 가지고 있는 경우, 차량 정보의 조작을 방지할 수 있다. 이때, 개인 정보 보호를 위해, 차량 정보는 각 차량의 사용자에게 공개되지 않고 차량 메이커 정도만 공개할 수 있다. In this way, when the vehicle is shipped, grouping is performed to prevent manipulation of vehicle information when other vehicles have vehicle information. At this time, in order to protect personal information, the vehicle information may not be disclosed to the users of each vehicle, but only the vehicle maker.
도 8은 본 발명의 다른 실시 예에 따른 그룹화된 차량간의 차량 통신의 가변 방법을 설명하기 위한 도면이다. 자율 주행 제어 장치(100)는 외부와 통신을 수행할 때 외부의 통신으로부터 해킹당할 가능성이 높다. 이에 그룹화 되어있는 차량 중 임의의 1대의 차량(101)만 외부 송신 기기(201)와 통신을 수행하도록 하고, 외부와 통신을 수행하는 차량이 그룹내의 나머지 차량(102, 103, 104)에게 외부로부터 수신한 정보를 전달하고, 나머지 차량(102, 103, 104)이 송신한 정보를 외부로 송신해준다. 이때, 외부와 통신을 수행하는 차량을 미리 정한 주기에 따라 그룹내의 차량 중 랜덤으로 변경하여 적용할 수 있도록 한다. 즉, 한대의 차량이 메인으로 외부와 계속 통신하는 경우, 그 차량이 외부로부터 해킹당할 가능성이 높아지므로, 그룹 내의 모든 차량이 돌아가면서 메인 차량이 되어 외부와 통신을 수행하도록 하여, 외부 해킹을 최소화할 수 있다.8 is a view for explaining a variable method of vehicle communication between grouped vehicles according to another embodiment of the present invention. The autonomous driving control device 100 is likely to be hacked from external communication when communicating with the outside. Accordingly, only one
이와 같이 본 발명은 블록체인 방식으로 차량을 그룹화하여 차량 정보를 공유함으로써 해킹 등에 의한 차량 제어 오류를 방지하여 주행 안정성을 증대시킬 수 있고, 사고 발생 시 차량의 기록 조작 등을 방지할 수 있어, 자율 주행 차량의 보안을 더욱 강화하여 상품성을 강화시킬 수 있다.As described above, the present invention can prevent vehicle control errors due to hacking and the like by sharing vehicles information by grouping vehicles in a block chain manner, thereby increasing driving stability, and preventing an operation of recording of a vehicle when an accident occurs. It is possible to further enhance the security of the driving vehicle, thereby enhancing the marketability.
이하, 도 9를 참조하여 본 발명의 일 실시 예에 따른 블록체인 방식 기반 자율 주행 제어 방법을 구체적으로 설명하기로 한다. 도 9는 본 발명의 일 실시 예에 따른 블록체인 방식 기반 자율 주행 제어 방법을 설명하기 위한 순서도로서, 주행 중 그룹화를 수행하고 그룹화된 차량들의 자율 주행 방법을 나타낸다. 이하에서는 도 1의 자율 주행 제어 장치(100)가 도 9의 프로세스를 수행하는 것을 가정한다. 또한, 도 9의 설명에서, 자율 주행 제어 장치(100)에 의해 수행되는 것으로 기술된 동작은 장치(100)의 프로세서(140)에 의해 제어되는 것으로 이해될 수 있다.Hereinafter, an autonomous driving control method based on a blockchain method according to an embodiment of the present invention will be described in detail with reference to FIG. 9. 9 is a flowchart for explaining a method for controlling autonomous driving based on a blockchain method according to an embodiment of the present invention, and shows grouping and autonomous driving methods of grouped vehicles during driving. Hereinafter, it is assumed that the autonomous driving control device 100 of FIG. 1 performs the process of FIG. 9. In addition, in the description of FIG. 9, an operation described as being performed by the autonomous driving control device 100 may be understood as being controlled by the
도 9를 참조하면 자율 주행 제어 장치(100)는 차량 시동 후 주행을 시작하면(S101), 차량이 현재 자율 주행 모드 상태인지를 판단한다(S102). 차량이 현재 자율 주행 모드 상태가 아닌 경우, 즉 일반 주행 모드인 경우, 자율 주행 제어 장치(100)는 현재 주행 모드를 유지한다(S103).Referring to FIG. 9, when the autonomous driving control apparatus 100 starts driving after the vehicle starts (S101), it determines whether the vehicle is currently in the autonomous driving mode (S102). If the vehicle is not in the current autonomous driving mode state, that is, in the normal driving mode, the autonomous driving control device 100 maintains the current driving mode (S103).
한편, 차량이 현재 자율 주행 모드 상태인 경우, 자율 주행 제어 장치(100)는 자차의 주행 방향 및 목적지를 확인한다(S104). 이때, 자율 주행 제어 장치(100)는 네비게이션 장치(400)와 연동하여 자차의 주행 방향 및 목적지를 확인할 수 있다. Meanwhile, when the vehicle is currently in the autonomous driving mode, the autonomous driving control device 100 checks the driving direction and the destination of the host vehicle (S104). At this time, the autonomous driving control device 100 may check the driving direction and destination of the host vehicle in conjunction with the navigation device 400.
이어, 자율 주행 제어 장치(100)는 자차가 주행하는 도로의 주변에 자율 주행 중인 주변 차량이 존재하는 지를 판단한다(S105). 이때, 자율 주행 제어 장치(100)는 주변차량과 통신을 시도하여 통신이 성공하면 주변 차량이 존재하는 것으로 판단할 수 있다. Subsequently, the autonomous driving control apparatus 100 determines whether there are autonomous vehicles in the vicinity of the road on which the host vehicle travels (S105). At this time, the autonomous driving control device 100 may attempt to communicate with the surrounding vehicle and determine that the surrounding vehicle exists if the communication is successful.
이에 자차가 주행하는 도로 주변에 자율 주행중인 주변 차량이 존재하지 않는 경우, 현재의 주행 상태를 계속 유지한다(S106). 반면, 자차가 주행하는 도로 주변에 자율 주행중인 주변 차량이 존재하는 경우, 자율 주행 제어 장치(100)는 주변 차량의 주행 방향 및 목적지가 자차의 주행 방향 및 목적지와 유사한지를 판단한다(S107). 즉 자율 주행 제어 장치(100)는 주변 차량으로부터 수신한 주행 정보를 이용하여 자차의 주행 방향 및 목적지를 주변 차량의 주행방향 및 목적지와 비교할 수 있다.Accordingly, when there is no autonomous vehicle in the vicinity of the road on which the host vehicle travels, the current driving state is maintained (S106). On the other hand, when there is an autonomous vehicle in the vicinity of a road on which the host vehicle travels, the autonomous vehicle control apparatus 100 determines whether the traveling direction and the destination of the surrounding vehicle are similar to the traveling direction and destination of the host vehicle (S107). That is, the autonomous driving control apparatus 100 may compare the driving direction and the destination of the host vehicle with the driving direction and the destination of the surrounding vehicle using the driving information received from the surrounding vehicle.
이에 주변 차량의 주행 방향 및 목적지가 자차의 주행 방향 및 목적지가 다른 경우, 자율 주행 제어 장치(100)는 그룹화를 수행하지 않고 종료한다. 반면 주변 차량의 주행 방향 및 목적지가 자차의 주행 방향 및 목적지가 유사한 경우, 자율 주행 제어 장치(100)는 해당 주변 차량과 자차를 그룹화한다(S108). 이때, 그룹화는 도 2 내지 도 4와 같이, 매트릭스 기반으로 그룹화될 수 있으나, 주변차량의 수에 따라 매트릭스의 모양 및 수가 변경될 수 있다.Accordingly, when the driving direction and the destination of the surrounding vehicle are different from the driving direction and the destination of the host vehicle, the autonomous driving control apparatus 100 ends without performing grouping. On the other hand, when the driving direction and the destination of the surrounding vehicle are similar to the driving direction and the destination of the host vehicle, the autonomous driving control device 100 groups the surrounding vehicle and the host vehicle (S108). At this time, the grouping may be grouped based on a matrix, as shown in FIGS. 2 to 4, but the shape and number of the matrix may be changed according to the number of surrounding vehicles.
자율 주행 제어 장치(100)는 그룹화된 그룹 내의 차량과 주행 기록을 공유하고(S109), 그룹화 차량과 주기적으로 통신을 수행하며 통신 이상이 발생하는 지를 판단한다(S110). 이때, 통신 이상은 데이터 송수신이 실패하는 경우를 포함할 수 있다.The autonomous driving control device 100 shares a driving record with a vehicle in the grouped group (S109), periodically communicates with the grouped vehicle, and determines whether a communication error occurs (S110). At this time, the communication abnormality may include a case in which data transmission and reception fails.
이때, 그룹화된 차량 중 하나의 차량의 통신 이상이 발생한 경우, 자율 주행 제어 장치(100)는 통신 이상이 발생한 차량으로 페일 세이프티 모드로 진입할 것을 요청할 수 있다. 또한, 자차의 통신 이상 발생을 판단하거나, 그룹내의 차량으로부터 자차의 통신 이상이 발생했음을 알림 통보를 수신하면, 자율 주행 제어 장치(100)는 자차를 페일 세이프티 모드로 진입시킨다(S111). At this time, when a communication error of one vehicle among the grouped vehicles occurs, the autonomous driving control device 100 may request that the vehicle enter the fail safety mode as a vehicle having a communication error. In addition, when it is determined that a communication abnormality of the host vehicle is received or a notification notification that a communication error of the host vehicle has occurred is received from the vehicle in the group, the autonomous driving control device 100 enters the host vehicle into the fail safety mode (S111).
이 후, 페일 세이프티 모드로 진입된 차량의 자율 주행 제어 장치(100)는 주변차량과 공유한 주행 기록을 이용하여 자율 주행을 계속 제어할 수 있다(S112).Thereafter, the autonomous driving control device 100 of the vehicle entering the fail-safe mode may continue to control autonomous driving by using the driving record shared with the surrounding vehicle (S112).
이와 같이, 본 발명은 차량이 주행 중 주변 차량과 통신을 수행하여 주행 방향 및 목적지가 유사한 차량들을 그룹화하고, 그룹화된 차량들 간에 서로 주행 정보를 공유함으로써, 그룹화된 차량들 중 하나가 해킹 등에 의해 통신 이상이 발생하더라도, 기 공유된 차량 주행 정보를 기반으로 자율 주행을 계속함으로써 안전 주행이 가능하다. As described above, according to the present invention, one vehicle is grouped by hacking or the like by communicating with surrounding vehicles while the vehicle is driving, grouping vehicles having similar driving directions and destinations, and sharing driving information among the grouped vehicles. Even if a communication error occurs, safe driving is possible by continuing autonomous driving based on previously shared vehicle driving information.
또한, 본 발명은 그룹화된 복수의 차량들간에 서로 주행 정보를 공유함으로써 그룹화된 차량들 중 하나가 해킹 등에 의해 차량 정보가 삭제되더라도, 타 차량의 공유된 주행 정보를 기반으로 실제 차량 정보를 복구할 수 있다.In addition, according to the present invention, even if one of the grouped vehicles is deleted by hacking or the like by sharing driving information with each other among a plurality of grouped vehicles, actual vehicle information can be restored based on the shared driving information of another vehicle. You can.
이에 본 발명은 사고 발생 시 차량의 기록을 조작하여 차량 제어 오류로 사고가 발생한 것으로 위장하거나 사고 상대차량의 기록을 조작하여 상대방의 실수로 사고가 발생한 것으로 위장하더라도, 그룹화된 차량 내에 이미 차량 주행 정보가 공유되어 있어, 이러한 조작을 용이하게 파악할 수 있다.Accordingly, the present invention provides vehicle driving information in a grouped vehicle even if an accident occurs due to a vehicle control error by manipulating the record of the vehicle in the event of an accident or an accident by the other party by manipulating the record of the vehicle of the accident. Is shared, and such an operation can be grasped easily.
도 10은 본 발명의 일 실시 예에 따른 컴퓨팅 시스템을 도시한다.10 illustrates a computing system according to an embodiment of the present invention.
도 10을 참조하면, 컴퓨팅 시스템(1000)은 버스(1200)를 통해 연결되는 적어도 하나의 프로세서(1100), 메모리(1300), 사용자 인터페이스 입력 장치(1400), 사용자 인터페이스 출력 장치(1500), 스토리지(1600), 및 네트워크 인터페이스(1700)를 포함할 수 있다. Referring to FIG. 10, the
프로세서(1100)는 중앙 처리 장치(CPU) 또는 메모리(1300) 및/또는 스토리지(1600)에 저장된 명령어들에 대한 처리를 실행하는 반도체 장치일 수 있다. 메모리(1300) 및 스토리지(1600)는 다양한 종류의 휘발성 또는 불휘발성 저장 매체를 포함할 수 있다. 예를 들어, 메모리(1300)는 ROM(Read Only Memory) 및 RAM(Random Access Memory)을 포함할 수 있다. The
따라서, 본 명세서에 개시된 실시 예들과 관련하여 설명된 방법 또는 알고리즘의 단계는 프로세서(1100)에 의해 실행되는 하드웨어, 소프트웨어 모듈, 또는 그 2 개의 결합으로 직접 구현될 수 있다. 소프트웨어 모듈은 RAM 메모리, 플래시 메모리, ROM 메모리, EPROM 메모리, EEPROM 메모리, 레지스터, 하드 디스크, 착탈형 디스크, CD-ROM과 같은 저장 매체(즉, 메모리(1300) 및/또는 스토리지(1600))에 상주할 수도 있다. Accordingly, steps of a method or algorithm described in connection with the embodiments disclosed herein may be directly implemented by hardware executed by the
예시적인 저장 매체는 프로세서(1100)에 커플링되며, 그 프로세서(1100)는 저장 매체로부터 정보를 판독할 수 있고 저장 매체에 정보를 기입할 수 있다. 다른 방법으로, 저장 매체는 프로세서(1100)와 일체형일 수도 있다. 프로세서 및 저장 매체는 주문형 집적회로(ASIC) 내에 상주할 수도 있다. ASIC는 사용자 단말기 내에 상주할 수도 있다. 다른 방법으로, 프로세서 및 저장 매체는 사용자 단말기 내에 개별 컴포넌트로서 상주할 수도 있다.An exemplary storage medium is coupled to the
이상의 설명은 본 발명의 기술 사상을 예시적으로 설명한 것에 불과한 것으로서, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 다양한 수정 및 변형이 가능할 것이다. The above description is merely illustrative of the technical idea of the present invention, and those skilled in the art to which the present invention pertains may make various modifications and variations without departing from the essential characteristics of the present invention.
따라서, 본 발명에 개시된 실시 예들은 본 발명의 기술 사상을 한정하기 위한 것이 아니라 설명하기 위한 것이고, 이러한 실시 예에 의하여 본 발명의 기술 사상의 범위가 한정되는 것은 아니다. 본 발명의 보호 범위는 아래의 청구범위에 의하여 해석되어야 하며, 그와 동등한 범위 내에 있는 모든 기술 사상은 본 발명의 권리범위에 포함되는 것으로 해석되어야 할 것이다.Therefore, the embodiments disclosed in the present invention are not intended to limit the technical spirit of the present invention, but to explain, and the scope of the technical spirit of the present invention is not limited by these embodiments. The scope of protection of the present invention should be interpreted by the claims below, and all technical spirits within the scope equivalent thereto should be interpreted as being included in the scope of the present invention.
Claims (21)
상기 프로세서에 의해 그룹화된 정보 및 상기 공유된 정보를 저장하는 저장부;
를 포함하는 자율 주행 제어 장치.A processor that groups a plurality of autonomous vehicles to generate at least one group, and shares vehicle information of each of a plurality of autonomous vehicles in each group among a plurality of autonomous vehicles in each group; And
A storage unit that stores information grouped by the processor and the shared information;
Autonomous driving control device comprising a.
상기 프로세서는 블록체인(blockchain) 방식을 기반으로 상기 복수의 자율 주행 차량을 그룹화하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 1,
The processor is an autonomous driving control device characterized in that the plurality of autonomous driving vehicles are grouped based on a blockchain method.
상기 프로세서는,
상기 적어도 하나 이상의 그룹 중
제 1 그룹과 제 2 그룹을 포함하는 제 3그룹을 신규 생성하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 1,
The processor,
Among the at least one or more groups
An autonomous driving control device characterized in that a third group including a first group and a second group is newly generated.
상기 프로세서는,
미리 정한 비율에 따라, 상기 제 1 그룹에 포함된 차량의 일부와 상기 제 2 그룹에 포함된 차량의 일부를 포함하는 상기 제 3 그룹을 생성하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 3,
The processor,
An autonomous driving control device according to a predetermined ratio, wherein the third group including a part of the vehicle included in the first group and a part of the vehicle included in the second group is generated.
상기 프로세서는,
자차가 주행 중인 경우,
자차의 주변을 주행하는 주변 차량 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 1,
The processor,
If your vehicle is driving,
An autonomous driving control device, characterized in that, among the surrounding vehicles driving around the own vehicle, the vehicle and the surrounding vehicle having a similar driving direction and destination are grouped.
상기 프로세서는,
상기 자차를 기준으로 매트릭스 방식으로 주변 차량과 그룹화를 수행하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 5,
The processor,
An autonomous driving control device characterized in that grouping with surrounding vehicles is performed in a matrix manner based on the host vehicle.
상기 프로세서는,
상기 자차가 주행 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행할 때, 자차를 포함하는 복수개의 그룹을 생성할 수 있는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 5,
The processor,
An autonomous driving control device for generating a plurality of groups including a host vehicle when the host vehicle is grouped with a surrounding vehicle having a similar driving direction and destination while the host vehicle is traveling.
상기 프로세서는,상기 그룹화된 그룹 내의 차량들 간에 차량 주행 정보를 공유하고
상기 그룹화된 그룹 내의 차량들 중 통신 이상이 발생한 차량이 존재하는 경우, 상기 통신 이상이 발생한 차량으로 페일 세이프티 모드(fail safety mode)로의 진입을 요청하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 5,
The processor shares vehicle driving information between vehicles in the grouped group,
An autonomous driving control device for requesting entry into a fail safety mode to a vehicle in which communication failure occurs among vehicles in the grouped group.
상기 프로세서는,
타 차량으로부터 상기 페일 세이프티 모드로의 진입을 요청받으면, 상기 페일 세이프티 모드로 진입 후, 상기 타 차량으로부터 공유된 차량 주행 정보를 기반으로 자율 주행 제어를 계속하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 8,
The processor,
An autonomous driving control device characterized in that, when requested to enter the fail-safe mode from another vehicle, after entering the fail-safe mode, autonomous driving control is continued based on the vehicle driving information shared from the other vehicle.
상기 프로세서는,
자차의 통신 이상을 발견한 경우, 자차를 페일 세이프티 모드로 진입시키고, 공유한 주변 차량의 차량 주행 정보를 기반으로 자율 주행 제어를 계속하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 8,
The processor,
An autonomous driving control device characterized in that when a communication abnormality of the host vehicle is found, the host vehicle enters the fail-safe mode and continues autonomous driving control based on the shared vehicle driving information of the surrounding vehicle.
상기 프로세서는,
상기 적어도 하나 이상의 그룹 중 하나의 그룹 내의 복수의 자율 주행 차량 중 자차가 외부와 통신을 수행하는 메인 통신 차량으로 지정되면,
외부와의 통신 데이터를 상기 자차와 그룹화 되어 있는 주변 차량들에게 전달하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 1,
The processor,
If the own vehicle among a plurality of autonomous vehicles in one of the at least one group is designated as the main communication vehicle that communicates with the outside,
An autonomous driving control device for transmitting communication data to the outside to surrounding vehicles grouped with the host vehicle.
상기 프로세서는,
미리 정한 주기에 따라 상기 자차와 그룹화 되어 있는 주변 차량들을 상기 메인 통신 차량으로 순차적으로 변경 지정하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 11,
The processor,
An autonomous driving control device characterized by sequentially designating and changing surrounding vehicles grouped with the host vehicle to the main communication vehicle according to a predetermined cycle.
상기 프로세서는,
차량 출고 시 복수의 자율 주행 차량을 그룹화하여 적어도 하나 이상의 그룹을 생성하는 것을 특징으로 하는 자율 주행 제어 장치.The method according to claim 1,
The processor,
An autonomous driving control device characterized in that at least one group is generated by grouping a plurality of autonomous driving vehicles when a vehicle leaves the factory.
상기 각 그룹 내의 복수의 자율 주행 차량 간에 통신을 수행하는 통신 모듈;
를 포함하는 차량 시스템.An autonomous driving control device for grouping a plurality of autonomous driving vehicles to generate at least one group, and sharing vehicle information of each of the plurality of autonomous driving vehicles in each group among a plurality of autonomous driving vehicles in the respective groups; And
A communication module performing communication between a plurality of autonomous vehicles in each group;
Vehicle system comprising a.
각 그룹 내의 복수의 자율 주행 차량 각각의 차량 정보를 상기 각 그룹 내의 복수의 자율 주행 차량 간에 공유하는 단계;
를 포함하는 자율 주행 제어 방법.Grouping a plurality of autonomous vehicles to generate at least one group; And
Sharing vehicle information of each of a plurality of autonomous vehicles in each group among a plurality of autonomous vehicles in each group;
Autonomous driving control method comprising a.
상기 적어도 하나 이상의 그룹을 생성하는 단계는, 블록체인(blockchain) 방식을 기반으로 상기 복수의 자율 주행 차량을 그룹화하는 것을 특징으로 하는 자율 주행 제어 방법.The method according to claim 15,
The generating of the at least one group may include autonomous driving control method characterized in that the plurality of autonomous driving vehicles are grouped based on a blockchain method.
상기 적어도 하나 이상의 그룹을 생성하는 단계는,
상기 적어도 하나 이상의 그룹 중 제 1 그룹과 제 2 그룹을 포함하는 제 3그룹을 신규 생성하고,
미리 정한 비율에 따라, 상기 제 1 그룹에 포함된 차량의 일부와 상기 제 2 그룹에 포함된 차량의 일부를 포함하는 상기 제 3 그룹을 생성하는 것을 특징으로 하는 자율 주행 제어 방법.The method according to claim 15,
The step of generating the at least one group,
A third group including the first group and the second group among the at least one group is newly created,
The autonomous driving control method of claim 1, wherein the third group includes a part of the vehicle included in the first group and a part of the vehicle included in the second group, according to a predetermined ratio.
상기 적어도 하나 이상의 그룹을 생성하는 단계는,
자차가 주행 중인 경우, 상기 자차의 주변을 주행하는 주변 차량 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행하는 것을 특징으로 하는 자율 주행 제어 방법.The method according to claim 15,
The step of generating the at least one group,
When the host vehicle is running, the autonomous driving control method of the surrounding vehicle driving the periphery of the host vehicle and performing grouping with the surrounding vehicle having a similar driving direction and destination.
상기 적어도 하나 이상의 그룹을 생성하는 단계는,
상기 자차를 기준으로 매트릭스 방식으로 주변 차량과 그룹화를 수행하는 것을 특징으로 하는 자율 주행 제어 방법.The method according to claim 18,
The step of generating the at least one group,
An autonomous driving control method, characterized in that grouping with surrounding vehicles is performed in a matrix manner based on the host vehicle.
상기 적어도 하나 이상의 그룹을 생성하는 단계는,
상기 자차가 주행 중 자차와 주행 방향 및 목적지가 유사한 주변차량과 그룹화를 수행할 때, 자차를 포함하는 복수개의 그룹을 생성하는 것을 특징으로 하는 자율 주행 제어 방법.The method according to claim 18,
The step of generating the at least one group,
When the own vehicle performs grouping with a surrounding vehicle having a similar driving direction and a destination while the host vehicle is driving, a plurality of groups including the host vehicle are generated.
상기 그룹화된 그룹 내의 차량들 중 통신 이상이 발생한 차량이 존재하는 경우, 상기 통신 이상이 발생한 차량으로 페일 세이프티 모드(fail safety mode)로의 진입을 요청하는 단계: 및
타 차량으로부터 상기 페일 세이프티 모드로의 진입을 요청받으면, 상기 페일 세이프티 모드로 진입 후, 상기 타 차량으로부터 공유된 차량 주행 정보를 기반으로 자율 주행 제어를 계속하는 단계
를 더 포함하는 것을 특징으로 하는 자율 주행 제어 방법.
The method according to claim 20,
If there is a vehicle in which communication failure occurs among vehicles in the grouped group, requesting entry into a fail safety mode to the vehicle in which the communication failure occurs: and
If a request to enter the fail-safe mode is received from another vehicle, after entering the fail-safe mode, continuing autonomous driving control based on the vehicle driving information shared from the other vehicle
Autonomous driving control method further comprising a.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180109698A KR102621706B1 (en) | 2018-09-13 | 2018-09-13 | Apparatus for autonomous driving vehicle, system having the same and method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180109698A KR102621706B1 (en) | 2018-09-13 | 2018-09-13 | Apparatus for autonomous driving vehicle, system having the same and method thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200034029A true KR20200034029A (en) | 2020-03-31 |
| KR102621706B1 KR102621706B1 (en) | 2024-01-08 |
Family
ID=70001966
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180109698A KR102621706B1 (en) | 2018-09-13 | 2018-09-13 | Apparatus for autonomous driving vehicle, system having the same and method thereof |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102621706B1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020087258A (en) * | 2018-11-30 | 2020-06-04 | 株式会社デンソー | Multiple platooning vehicles, and control device for controlling the vehicles |
| WO2023113239A1 (en) * | 2021-12-16 | 2023-06-22 | 주식회사 캐플릭스 | System for operating rental car by using connected car |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11134600A (en) * | 1997-10-31 | 1999-05-21 | Toyota Motor Corp | Traveling controller of automatic traveling vehicle |
| KR101472090B1 (en) * | 2013-12-24 | 2014-12-16 | 한국철도기술연구원 | control apparatus for group driving |
| KR20170016177A (en) * | 2015-08-03 | 2017-02-13 | 엘지전자 주식회사 | Vehicle and control method for the same |
| KR20170089795A (en) * | 2017-07-17 | 2017-08-04 | 강정헌 | Using centrally managed block chain authentication autonomous cluster communication security system and method |
-
2018
- 2018-09-13 KR KR1020180109698A patent/KR102621706B1/en active IP Right Grant
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11134600A (en) * | 1997-10-31 | 1999-05-21 | Toyota Motor Corp | Traveling controller of automatic traveling vehicle |
| KR101472090B1 (en) * | 2013-12-24 | 2014-12-16 | 한국철도기술연구원 | control apparatus for group driving |
| KR20170016177A (en) * | 2015-08-03 | 2017-02-13 | 엘지전자 주식회사 | Vehicle and control method for the same |
| KR20170089795A (en) * | 2017-07-17 | 2017-08-04 | 강정헌 | Using centrally managed block chain authentication autonomous cluster communication security system and method |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020087258A (en) * | 2018-11-30 | 2020-06-04 | 株式会社デンソー | Multiple platooning vehicles, and control device for controlling the vehicles |
| WO2023113239A1 (en) * | 2021-12-16 | 2023-06-22 | 주식회사 캐플릭스 | System for operating rental car by using connected car |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102621706B1 (en) | 2024-01-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3445017B1 (en) | A method relating to a motor vehicle driver assistance system | |
| US11117513B2 (en) | Method and apparatus for vehicle interaction for autonomous vehicle | |
| US11928968B2 (en) | Platooning control apparatus based on active collision avoidance control, a system including the same, and a method thereof | |
| US20180224850A1 (en) | Autonomous vehicle control system implementing teleassistance | |
| US10089116B2 (en) | Secure start system for an autonomous vehicle | |
| US11005649B2 (en) | Autonomous driving controller encrypted communications | |
| US10140468B2 (en) | Secure start system for an autonomous vehicle | |
| KR102621706B1 (en) | Apparatus for autonomous driving vehicle, system having the same and method thereof | |
| CN112650977B (en) | Method for protecting neural network model | |
| US20230271632A1 (en) | Apparatus for controlling autonomous driving of a vehicle, system having the same and method thereof | |
| IL268328A (en) | Device, system and method for traffic management | |
| US11593119B2 (en) | Autonomous driving controller parallel processor boot order | |
| KR102634348B1 (en) | Apparatus for controlling display of vehicle, system having the same and method thereof | |
| US20230192084A1 (en) | Autonomous vehicle, control system for sharing information with autonomous vehicle, and method thereof | |
| US11561847B2 (en) | Execution sequence integrity parameter monitoring system | |
| US20210326437A1 (en) | Context-based response to attacks against autonomous systems | |
| US11895241B2 (en) | Driver assistance apparatus and method | |
| KR102634361B1 (en) | Apparatus and method for servicing 4 demension effect using vehicle | |
| US11967241B2 (en) | Platooning control apparatus based on active collision avoidance control, a system including the same, and a method thereof | |
| CN114523976B (en) | Control system and method for intelligently driving vehicle | |
| KR20220006897A (en) | Apparatus for controlling platooning, system having the same and method thereof | |
| JP2021012653A (en) | Arithmetic device and data transmission method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |