KR20190037241A - 치열 메시 브레이스 제거를 위한 방법 및 시스템 - Google Patents
치열 메시 브레이스 제거를 위한 방법 및 시스템 Download PDFInfo
- Publication number
- KR20190037241A KR20190037241A KR1020197002635A KR20197002635A KR20190037241A KR 20190037241 A KR20190037241 A KR 20190037241A KR 1020197002635 A KR1020197002635 A KR 1020197002635A KR 20197002635 A KR20197002635 A KR 20197002635A KR 20190037241 A KR20190037241 A KR 20190037241A
- Authority
- KR
- South Korea
- Prior art keywords
- digital
- model
- tooth
- tooth model
- digital mesh
- Prior art date
Links
Images
































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C7/00—Orthodontics, i.e. obtaining or maintaining the desired position of teeth, e.g. by straightening, evening, regulating, separating, or by correcting malocclusions
- A61C7/002—Orthodontic computer assisted systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0088—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for oral or dental tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C13/00—Dental prostheses; Making same
- A61C13/0003—Making bridge-work, inlays, implants or the like
- A61C13/0004—Computer-assisted sizing or machining of dental prostheses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C7/00—Orthodontics, i.e. obtaining or maintaining the desired position of teeth, e.g. by straightening, evening, regulating, separating, or by correcting malocclusions
- A61C7/08—Mouthpiece-type retainers or positioners, e.g. for both the lower and upper arch
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C7/00—Orthodontics, i.e. obtaining or maintaining the desired position of teeth, e.g. by straightening, evening, regulating, separating, or by correcting malocclusions
- A61C7/12—Brackets; Arch wires; Combinations thereof; Accessories therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C9/00—Impression cups, i.e. impression trays; Impression methods
- A61C9/004—Means or methods for taking digitized impressions
- A61C9/0046—Data acquisition means or methods
- A61C9/0053—Optical means or methods, e.g. scanning the teeth by a laser or light beam
- A61C9/006—Optical means or methods, e.g. scanning the teeth by a laser or light beam projecting one or more stripes or patterns on the teeth
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2576/00—Medical imaging apparatus involving image processing or analysis
Abstract
본 출원의 예시적인 방법 및 장치 실시예는 개별적인 구강내 치열의 디지털 모델을 획득할 수 있고 와이어 및 브래킷을 포함하는 브레이스 표현 제거 후 치아 표면 복원을 수행할 수 있다.
Description
본 개시는 일반적으로 3 차원 메시에 의해 표현되는 엘리먼트의 조작에 관한 것으로, 보다 구체적으로는 반사 이미징을 사용하여 획득된 윤곽선 이미지에서 치관(tooth crown) 표면 조작을 위한 방법 및 장치에 관한 것이다.
3 차원(3-D) 이미징 및 3 차원 이미지 처리는 컴퓨터 지원 진단 및 전반적인 환자 치료 개선을 위해 치과/치과 교정 의사의 관심이 증가하는 분야이다. 두부 계측 방사선(cephalometric) 분석 분야에서, 3-D 이미징 및 3-D 이미지 처리는 유연성, 정확성 및 반복성의 측면에서 중요한 이점을 제공한다. 3 차원 두부 계측 방사선 분석은, 예를 들어, 투시 투영, 배율 및 투영에서의 머리 위치 결정의 2 차원(2-D) 기하학적 오류와 같은 기존의 2 차원(2-D) 두부 계측 방사선 분석 방법과 관련된 몇 가지 단점을 극복한다. 3-D 두부 계측 방사선법은, 2-D 두부 계측 방사선법의 경우에서와 같이 이산 측정에 크게 의존하기 보다는 계산을 기반으로 하므로, 보다 정확한 목표 데이터를 산출하는 것으로 나타났다.
3 차원 두부 계측 방사선법을 이용한 초기 연구는 환자 머리의 원추형 빔 전산화 단층 촬영(cone beam computed tomography, CBCT)을 이용하여 상악 안면(maxillo-facial) 해부학적 구조의 3 차원 이미징 및 파라메트릭 분석을 사용했다. CBCT 방법을 사용하는 3 차원 두부 계측 방사선 분석의 중요한 역할은 각 치아 또는 치아 그룹에 대해 관성 축이 계산된 상악궁 및 하악궁(maxillary and mandibular arches)의 수학적 모델을 정의하는 것이었다. 이것은 차례로 환자의 획득된 CBCT 머리 볼륨으로부터 개별 치아의 세분화를 요구했다.
통상적으로, 교정 치료 절차 동안, 치료 진행을 평가하는 데 복수의 2-D X-선 두부 계측 사진 획득이 사용된다. 또한 이 목적을 위해 다수의 CBCT 스캔을 필요로 하는 기존의 3 차원(3-D) 두부 계측 방사선 분석법이 사용될 수 있다. 그러나, 2-D 및 3-D 방사선 이미징 방법은 모두 전리 방사선(ionizing radiation)에 환자를 노출시킨다. 전체 환자에 대해 방사선 노출을 감소시키는 것이 바람직하며, 특히, 젊은 환자에 대해 방사선 노출을 감소시키는 것이 바람직하다.
광학 구강내 스캔(optical intraoral scans)은 일반적으로 치열 물체의 윤곽선을 생성하고, 치아, 잇몸 및 기타 구강내 구조의 시각화를 개선하는 데 유용하다. 표면 윤곽선 정보는 치아 상태를 평가하는 데 특히 유용 할 수 있으며, 치아 보존과 같은 다양한 유형의 치과 절차에 대한 가치를 인정하고 있다. 이것은 치과 의사가 다양한 문제를 식별하고 환자의 치아 및 지지 구조(supporting structures)와 관련된 다른 측정 및 관측을 확인하는 데 도움을 주는 유용한 도구를 제공할 수 있다. 표면 윤곽선 정보는 또한 개별 치아와 같은 치열 요소의 3-D 모델을 생성하는 데 사용될 수 있으며; 개별 치아와 관련된 포지션 및 배향 정보는 치열 교정 치료(orthodontic treatment) 진행을 평가하는 데 사용될 수 있다. 표면 윤곽선 이미징을 적절히 사용하면, 환자의 치열에 대한 2-D 또는 3-D의 X-선을 취득할 필요가 회피될 수 있다.
의료, 산업 및 다른 응용 분야에서 다양한 유형의 객체로부터 표면 윤곽선 정보를 획득하기 위한 많은 기술이 개발되어 왔다. 광학 3 차원(3-D) 측정 방법은 다양한 방식으로 표면에 지향된 광을 사용하여 형상 및 공간 정보를 제공한다. 윤곽선 이미징에 사용되는 이미징 방법의 유형 중에는 프린지 투영(fringe projection) 디바이스가 있다. 프린지 투영 이미징은 다양한 유형의 구조물에 대한 표면 윤곽선 정보를 획득하기 위해 패턴화되거나 구조화된 광 및 카메라/센서 삼각 측량을 사용한다. 프린지 투영 이미지가 처리되면, 점군(point cloud)이 생성될 수 있다. 이어서, 표면에 대해 적어도 평면 근사(planar approximation)를 재구성하기 위해, 점군 또는 복수의 점군으로부터 메시(mesh)가 형성될 수 있다.
메시 표현은 치아 및 잇몸의 표면 구조를 나타내는 데 특히 유용할 수 있으며, 유해한 방사선 수준을 요구하지 않고 휴대용 카메라를 사용하여 획득될 수 있다. 그러나, 종래의 이미지 처리 접근법을 사용하는 경우, 메시 표현은 원추형 빔 전산화 단층 촬영(CBCT) 또는 환자를 방사선에 노출시키는 다른 기술을 사용하여 이용 가능한 고유의 융통성 및 실용성에서 일부가 부족한 것으로 밝혀졌다. 메시 표현이 실망스러운 결과만을 발생시킨 한 분야는 세분화(Segmentation)와 관련된다. 세분화는 치과 의사가 치관 및 치아의 다른 가시적인 부분을 식별하여 잇몸 및 관련 지지 구조로부터 분리시킬 수 있게 한다. 메시 이미지의 세분화를 위한 기존의 방법은 종종 부정확할 수 있으며 치아 구조를 지지 조직와 구별하지 못하게 할 수 있다.
메시 이미지에 대한 세분화 문제를 해결하기 위한 다양한 접근법이 다음과 같이 제안되었다:
(i) (Computer-Aided Design & applications, 7(a), 2010에서) Thomas Kronfeld 등에 의한 논문 "가상 치과 모형으로부터 치아의 스네이크 기반 세분화(Snake-Based Segmentation of Teeth from Virtual Dental Casts)"에서 기술된 방법은 단일 가공 반복에서 매 치아와 잇몸 표면을 분리하려는 능동적인 윤곽선 세분화 방법을 사용한다. 그러나, 기술된 접근법은 토폴로지에 독립적인 방법이 아니며, 특히 턱 메시(jaw mesh)에 치아가 없는 경우에는 실패할 수 있다.
(ii) (Proc. CVPI vol II 2003에서) Page, D.L. 등에 의한 "빠른 마칭 분수계를 이용한 인식 기반 3D 삼각형 메시 세분화(Perception-based 3D Triangle Mesh Segmentation Using Fast Marching Watershed)" 명칭의 논문은 메시 세분화를 위해 빠른 마칭 분수계(Fast Marching Watershed)를 사용하는 것을 기술하고 있다. 기술된 빠른 마칭 분수계(Fast Marching Watershed) 방법은 사용자가 시드 포인트(seed points)를 수동으로 입력할 것을 요구한다. 시드 포인트는 세분화 중인 영역의 윤곽선의 양 측면에 배치되어야 한다. 이 방법은 그 후 시드 정보를 사용하여 한 번에 모든 영역을 분할하려고 시도한다. 턱 메시 세분화의 경우, 이러한 유형의 방법은 각 잇몸뿐만 아니라 각 치아를 동시에 세분화한다. 이것은 상기 방법을 덜 바람직하게 만드는데, 그 이유는 잇몸 영역으로부터 치아를 세분화하는 것이 일반적으로 치아를 서로로부터 세분화하는 작업에 필요한 것과 다른 파라미터 및 처리를 필요로 하기 때문이다. 대체 세분화 요구 사항을 가진 상이한 유형의 치열 요소에 대해 상이한 세분화 전략을 사용하면 더 나은 성능을 얻을 수 있다.
(iii) "디지털 치과 모델의 자동화된 세분화를 위해 개발된 소프트웨어의 평가"라는 논문을 지원하기 위해 J.M. Moon은 세분화 과정을 두 단계, 즉, 잇몸 구조로부터 치아의 분리 및 전체 치열궁 구조를 개별 치아 객체로 세분화하는 단계로 분해한 소프트웨어 도구를 사용했다. Moon의 논문에서 사용된 소프트웨어 도구는 메시에서 최대 곡률을 찾으며, 사용자가 치아를 세분화하는 데 사용되는 마진 정점(margin vertices)을 획득하기 위해 곡률 임계치를 수동으로 선택할 것을 요구한다. 이 소프트웨어는 또한 사용자가 오류가 있는 세분화 결과를 제거하기 위해 마진을 수동으로 편집할 것을 요구한다. 형상 및 포지션의 특성의 분석을 지향하는 이 소프트웨어 도구는 잇몸 영역에서 치아 영역을 분리하는 데 컬러 정보를 사용하는 것을 고려하고 있지는 않다.
(iv) Jones, T.N. 등에 의한 "개개의 치열 요소의 모델을 형성하기 위한 디지털 치열 모델의 조작(Manipulation a digital dentition model to form models of individual dentition components)"이라는 명칭의 미국 특허 출원 제20030039389 A1호는 인접한 치아를 나타내는 치열 모델의 부분을 분리하는 방법을 개시하고 있다.
기존의 방법은 제한된 세트의 테스트 케이스로 일정 수준의 성공을 보여주고 있지만, 이러한 방법 중 어느 것도 견고하고 상업적으로 실행 가능한 것으로 보이지는 않는다. 또한, 종래의 방법은 스캔된 치열 메시 모델에 종종 존재하는 브래킷/브레이스를 다루기 위한 어떠한 기능도 제공하지 못한다.
치료(예를 들어, 치열 교정) 동안 (예를 들어, 수 회의) 진행 평가를 위한 치아 메시 모델의 명확한 3D 뷰를 획득하기 위해서는 구강내 스캐닝을 수행하기 전에 치아에서 물리적 브래킷/브레이스를 제거하는 것이 바람직하다. 그러나, 치아 에나멜(tooth enamel)은 브레이스를 제거하는 것(예를 들어, 본딩 해제(de-bonding), 염색(staining), 굴곡 표면(rough surface) 상의 플라그 누적)에 의해 손상될 수 있다. 브래킷을 제거하는 동안 손실된 에나멜 두께는 약 150 미크론으로 추정되었다. 한 가지 해결책은 치아에서 물리적 브레이스를 제거하지 않고 치열(dentition)/치열궁(dental arch)을 스캔하고, 메시 조작(mesh manipulation)으로 치열궁 메시를 제거(clean up)하는 것이다.
“가상 치열 모델을 준비하고 그로부터 치과용 리테이너를 제조하는 방법(Methods of preparing a virtual dentition model and fabricating a dental retainer therefrom)"이라는 명칭의 미국 특허 제 8,738,165 호는 치과 환자의 치열의 가상 모델이 환자의 치아 및 치아에 연결된 치열 교정 기기의 디지털 데이터 파일을 획득하고, 그 후 그 디지털 데이터 파일의 데이터를 상기 기기 하단에 있는 치아의 표면을 나타내는 다른 데이터와 결합함으로써 제공되는 것을 개시하고 있다. 미국 특허 제 8,738,165 호에서, 가상 모델은 치과용 리테이너를 만드는 데 사용될 수 있는 환자의 현재 치열의 실제 모델을 준비하는 데 사용된다. 미국 특허 제 8,738,165 호는 또한 이미지 조작 소프트웨어의 편집 도구를 사용하여 치열 교정 기기를 나타내는 데이터를 제거할 수 있음을 개시하고 있다. 미국 특허 제 8,738,165 호에서 사용되는 이미지 조작 소프트웨어는 (Geomagic, Inc., Research Triangle Park, NC의) "Geomagic Studio"로 알려져 있으며, 여기에서는 컴퓨터 마우스 또는 다른 입력 디바이스를 사용하는 기술자에 의해 이미지의 일부가 식별되어 삭제될 필요가 있다. 미국 특허 제 8,738,165 호는 또한 (Pixologic, Inc. of Los Angeles, Calif.)의 "ZBrush"로 알려진 소프트웨어를 사용하여 상기 결합된 데이터를 디지털로/수동으로 미세 조정하고 조형한다는 것을 개시하고 있다.
따라서, 치아/치관 표면 재구성을 통한 브래킷 제거를 포함하는 치아 및 잇몸 구조의 메시 표현의 세분화를 위해, 바람직하게는 인간의 개입이 없는 또는 인간의 지원이 거의 없는 개선된 방법 및/또는 장치가 필요하다.
본 출원의 일 양태는 의료 및 치과 용 애플리케이션에 사용되는 볼륨 이미징 및 시각화와 관련하여 치아 세분화 및/또는 조작 기술을 개선시키는 것이다.
본 출원의 또 다른 양태는 관련 기술 분야의 적어도 전술한 것 및 기타 결함을 전체적으로 또는 부분적으로 해결하는 것이다.
본 출원의 또 다른 양태는 적어도 본 명세서에서 설명된 이점을 전체적으로 또는 부분적으로 제공하는 것이다.
본 개시에 따른 방법 및/또는 장치 실시예는, 브레이스 표현이 제거되거나 감소되고 치아 표면이 명확성을 위해 추가되거나 복원되는 3D 치열 모델의 개선된 시각화 및 평가에 대한 특정 요구를 해결할 수 있다. 복원된 3D 치열 모델은 CBCT 및 다른 방사선 볼륨 이미징 방법을 사용하여 얻은 내부 구조와 함께 사용될 수 있고, 환자로부터 얻은 반사 이미지 데이터와 상호 연관될 수 있다.
이들 목적은 단지 예시적인 방법으로만 주어지며, 이러한 목적은 본 출원의 하나 이상의 실시예에 대한 예시일 수 있다. 예시적인 방법 및/또는 장치 실시예에 의해 본질적으로 달성되는 다른 바람직한 목적 및 이점이 발생될 수 있고, 당업자에게는 명백한 것일 수 있다. 본 발명은 첨부된 청구범위에 의해 정의된다.
본 개시의 일 양태에 따르면, 재구성된 치열의 디지털 모델을 생성하는 방법이 제공되며, 이 방법은 브레이스, 치아 및 잇몸을 포함하는 환자의 치열의 3-D 디지털 메시 치열 모델을 획득하는 단계와, 상기 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 와이어 부분을 제거하여 상기 3-D 디지털 메시 치열 모델을 수정하는 단계와, 상기 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 브래킷 부분을 제거하여 상기 3-D 디지털 메시 치열 모델을 수정하는 단계와, 상기 수정된 3-D 디지털 메시 치열 모델의 치아 표면을 재구성하는 단계 - 상기 치아 표면은 이전에 상기 브레이스의 상기 와이어 부분 및 상기 브래킷 부분에 의해 덮여 있었음 - 와, 재구성된 3-D 디지털 메시 치열 모델을 네트워크를 통해 다른 컴퓨터에 디스플레이, 저장 또는 송신하는 단계를 포함한다.
본 발명의 전술 및 다른 목적, 특징 및 이점은, 첨부 도면에 도시된 바와 같이, 본 발명의 실시예에 대한 다음의 보다 상세한 설명으로부터 명백해질 것이다. 도면의 구성 요소는 반드시 서로에 대해 축척대로 도시되는 것은 아니다.
도 1은 환자의 치아 및 관련 구조의 표면 윤곽선 이미징을 위한 이미징 장치의 컴포넌트를 나타내는 개략도이다.
도 2는 핸드헬드 카메라 또는 다른 휴대용 이미징 디바이스를 사용하여 표면 윤곽선 정보를 획득하는 데 패턴화된 광이 어떻게 사용되는지를 개략적으로 도시한다.
도 3은 다수의 라인의 광을 갖는 패턴을 사용하는 표면 이미징의 예를 도시한다.
도 4는 도 3에 도시된 것과 같은 구조화된 광 이미징에서 생성된 점군을 도시한다.
도 5는 삼각형 메시의 간단한 형태로 다각형 메시를 도시한다.
도 6a는 본 개시의 일 실시예에 따른 메시 세분화를 위한 하이브리드 시퀀스를 나타내는 논리 흐름도이다.
도 6b는 본 개시의 일 실시예에 따른 치아의 하이브리드 세분화를 위한 작업 흐름 시퀀스를 나타내는 논리 흐름도이다.
도 7a는 불량하게(poorly) 세분화된 치아의 예를 나타낸다.
도 7b는 개선된 세분화의 예를 나타낸다.
도 8a는 시드 라인 트레이스 패턴(seed line trace pattern)의 예를 나타낸다.
도 8b는 블록 라인 트레이스 패턴(block line trace pattern)의 예를 나타낸다.
도 9a, 도 9b 및 도 9c는 본 개시의 특정 실시예에 따라, 치아 메시 세분화 처리를 미세 조정하기 위한 마크업 명령의 검토 및 입력을 위한 조작자 인터페이스 스크린을 나타낸다.
도 10은 본 출원의 예시적인 실시예에 따른 치아 메시 표면으로부터 브래킷을 제거하기 위한 시퀀스를 나타내는 논리 흐름도이다.
도 11은 치아, 브래킷 및 잇몸을 포함하는 치열 메시의 예를 나타낸다.
도 12는 본 출원의 예시적인 실시예에 따른 3D 치열 메시로부터의 최종 분리된 치아의 예를 나타내는 도면이다.
도 13a 내지 도 13c는 3D 치열 메시의 치아 표면으로부터 브래킷을 제거하고, 그 후에 치아 표면을 재구성하는 예를 나타낸다.
도 13d 및 도 13e는 브래킷이 제거된 치아 메시 표면 상의 홀(hole) 및 홀을 충전하는 초기 패치를 나타내는 도면이다.
도 13f는 치아 표면 메시 패치에서의 삼각형의 초기 배열 및 치아 표면 메시 패치를 위한 삼각형의 수정된 배열을 나타내는 도면이다.
도 14는 본 출원의 다른 예시적인 실시예에 따라 치아 메시 표면으로부터 브래킷을 제거하기 위한 시퀀스를 나타내는 논리 흐름도이다.
도 15는 본 출원의 예시적인 일 실시예에 따라 치아 메시로부터 브래킷을 분리하기 위한 작도(delineation) 명령의 검토 및 입력을 위한 조작자 인터페이스 스크린 실시예를 나타낸다. 도 15는 또한 브래킷을 둘러싸는 폐 윤곽선(closed contour) 또는 스네이크(snake)의 예를 나타낸다.
도 16은 폐 윤곽선 내에서 강조 표시된 메시 정점의 예를 나타낸다.
도 17은 브래킷이 제거된 후의 재구성된 치아 표면의 예를 나타낸다.
도 18 내지 도 20은 본 출원의 예시적인 이 실시예에 따라, 브래킷을 갖는 치열 모델, 식별된 브래킷을 갖는 동일한 치열 모델, 및 브래킷이 제거된 후의 재구성된 치아의 예를 제각기 나타내는 도면이다.
도 21a는 치아, 브릿지형 브래킷 및 잇몸을 포함하는 치열 메시의 예를 나타내는 도면이다.
도 21b는 본 출원의 예시적인 실시예에 따라 단선된 브래킷 간의 브릿지(예를 들어, 와이어)를 갖는 일 예의 치열 메시를 나타내는 도면이다.
도 21c는 브릿지(예를 들어, 와이어)의 검출을 예시하는 일 예의 치열 메시를 나타내는 도면이다.
도 22는 본 출원의 예시적인 실시예에 따라 브릿지 와이어를 단선시킨 후 브래킷 제거 및 표면 재구성의 결과의 예를 나타낸다.
도 23은 본 개시의 실시예에 따른 치아 메시 표면으로부터 브릿지형 브래킷 제거를 위한 시퀀스를 나타내는 논리 흐름도이다.
도 24는 본 개시의 또 다른 실시예에 따라 치아 메시 표면으로부터 브릿지형 브래킷 제거를 위한 시퀀스를 나타내는 논리 흐름도이다.
도 1은 환자의 치아 및 관련 구조의 표면 윤곽선 이미징을 위한 이미징 장치의 컴포넌트를 나타내는 개략도이다.
도 2는 핸드헬드 카메라 또는 다른 휴대용 이미징 디바이스를 사용하여 표면 윤곽선 정보를 획득하는 데 패턴화된 광이 어떻게 사용되는지를 개략적으로 도시한다.
도 3은 다수의 라인의 광을 갖는 패턴을 사용하는 표면 이미징의 예를 도시한다.
도 4는 도 3에 도시된 것과 같은 구조화된 광 이미징에서 생성된 점군을 도시한다.
도 5는 삼각형 메시의 간단한 형태로 다각형 메시를 도시한다.
도 6a는 본 개시의 일 실시예에 따른 메시 세분화를 위한 하이브리드 시퀀스를 나타내는 논리 흐름도이다.
도 6b는 본 개시의 일 실시예에 따른 치아의 하이브리드 세분화를 위한 작업 흐름 시퀀스를 나타내는 논리 흐름도이다.
도 7a는 불량하게(poorly) 세분화된 치아의 예를 나타낸다.
도 7b는 개선된 세분화의 예를 나타낸다.
도 8a는 시드 라인 트레이스 패턴(seed line trace pattern)의 예를 나타낸다.
도 8b는 블록 라인 트레이스 패턴(block line trace pattern)의 예를 나타낸다.
도 9a, 도 9b 및 도 9c는 본 개시의 특정 실시예에 따라, 치아 메시 세분화 처리를 미세 조정하기 위한 마크업 명령의 검토 및 입력을 위한 조작자 인터페이스 스크린을 나타낸다.
도 10은 본 출원의 예시적인 실시예에 따른 치아 메시 표면으로부터 브래킷을 제거하기 위한 시퀀스를 나타내는 논리 흐름도이다.
도 11은 치아, 브래킷 및 잇몸을 포함하는 치열 메시의 예를 나타낸다.
도 12는 본 출원의 예시적인 실시예에 따른 3D 치열 메시로부터의 최종 분리된 치아의 예를 나타내는 도면이다.
도 13a 내지 도 13c는 3D 치열 메시의 치아 표면으로부터 브래킷을 제거하고, 그 후에 치아 표면을 재구성하는 예를 나타낸다.
도 13d 및 도 13e는 브래킷이 제거된 치아 메시 표면 상의 홀(hole) 및 홀을 충전하는 초기 패치를 나타내는 도면이다.
도 13f는 치아 표면 메시 패치에서의 삼각형의 초기 배열 및 치아 표면 메시 패치를 위한 삼각형의 수정된 배열을 나타내는 도면이다.
도 14는 본 출원의 다른 예시적인 실시예에 따라 치아 메시 표면으로부터 브래킷을 제거하기 위한 시퀀스를 나타내는 논리 흐름도이다.
도 15는 본 출원의 예시적인 일 실시예에 따라 치아 메시로부터 브래킷을 분리하기 위한 작도(delineation) 명령의 검토 및 입력을 위한 조작자 인터페이스 스크린 실시예를 나타낸다. 도 15는 또한 브래킷을 둘러싸는 폐 윤곽선(closed contour) 또는 스네이크(snake)의 예를 나타낸다.
도 16은 폐 윤곽선 내에서 강조 표시된 메시 정점의 예를 나타낸다.
도 17은 브래킷이 제거된 후의 재구성된 치아 표면의 예를 나타낸다.
도 18 내지 도 20은 본 출원의 예시적인 이 실시예에 따라, 브래킷을 갖는 치열 모델, 식별된 브래킷을 갖는 동일한 치열 모델, 및 브래킷이 제거된 후의 재구성된 치아의 예를 제각기 나타내는 도면이다.
도 21a는 치아, 브릿지형 브래킷 및 잇몸을 포함하는 치열 메시의 예를 나타내는 도면이다.
도 21b는 본 출원의 예시적인 실시예에 따라 단선된 브래킷 간의 브릿지(예를 들어, 와이어)를 갖는 일 예의 치열 메시를 나타내는 도면이다.
도 21c는 브릿지(예를 들어, 와이어)의 검출을 예시하는 일 예의 치열 메시를 나타내는 도면이다.
도 22는 본 출원의 예시적인 실시예에 따라 브릿지 와이어를 단선시킨 후 브래킷 제거 및 표면 재구성의 결과의 예를 나타낸다.
도 23은 본 개시의 실시예에 따른 치아 메시 표면으로부터 브릿지형 브래킷 제거를 위한 시퀀스를 나타내는 논리 흐름도이다.
도 24는 본 개시의 또 다른 실시예에 따라 치아 메시 표면으로부터 브릿지형 브래킷 제거를 위한 시퀀스를 나타내는 논리 흐름도이다.
다음은 예시적인 실시예에 대한 상세한 설명이며, 동일한 참조 부호가 여러 도면의 각각에서 동일한 구조의 요소를 나타내는 도면이 참조된다.
동일한 요소가 사용될 때, "제 1", "제 2" 등의 용어는 반드시 임의의 순서 또는 우선 순위의 관계를 나타내는 것이 아니라, 한 요소를 다른 요소로부터 또는 요소 간의 시간 간격을 보다 명확하게 구별하기 위해 사용될 수 있다.
"예시적인"이라는 용어는 설명이 이상적인 것을 암시하기보다는 예시로서 사용됨을 나타낸다.
본 출원에 사용되는 용어 "신호 통신"은 두 개 이상의 디바이스 및/또는 컴포넌트가 일부 유형의 신호 경로를 통해 이동하는 신호를 통해 서로 통신할 수 있음을 의미한다. 신호 통신은 유선 또는 무선일 수 있다. 신호는 제 1 디바이스 및/또는 컴포넌트로부터 제 2 디바이스 및/또는 컴포넌트로의 정보, 전력 및/또는 에너지를 제 1 디바이스 및/또는 컴포넌트와 제 2 디바이스 및/또는 컴포넌트 간의 신호 경로를 따라 통신할 수 있는 통신, 전력, 데이터 또는 에너지 신호일 수 있다. 신호 경로는 제 1 디바이스 및/또는 컴포넌트와 제 2 디바이스 및/또는 컴포넌트 간의 물리적, 전기적, 자기적, 전자기적, 광학적, 유선, 및/또는 무선 접속을 포함할 수 있다. 신호 경로는 또한 제 1 디바이스 및/또는 컴포넌트와 제 2 디바이스 및/또는 컴포넌트 간의 추가 디바이스 및/또는 컴포넌트를 포함할 수 있다.
본 개시의 문맥에서, "픽셀" 및 "복셀"이라는 용어는 개별 디지털 이미지 데이터 요소, 즉, 측정된 이미지 신호 강도를 나타내는 단일 값을 기술하기 위해 상호 교환가능하게 사용될 수 있다. 통상적으로, 개별 디지털 이미지 데이터 요소는 3 차원 또는 볼륨 이미지에 대한 복셀(voxel) 및 2 차원(2-D) 이미지에 대한 픽셀로 지칭된다. 본원의 설명의 목적을 위해, 복셀 및 픽셀이라는 용어는 일반적으로 수치 값의 범위를 가질 수 있는 이미지 요소 데이터를 기술하는 것으로, 동등한 것으로 간주될 수 있다. 복셀과 픽셀은 공간 위치와 이미지 데이터 코드 값 모두의 속성을 갖는다.
"패턴화된 광"은, 그 광이 하나 이상의 식별 가능한 평행선, 곡선, 격자 또는 바둑판 패턴과 같은 하나 이상의 특징 또는 또는 조명이 없는 영역에 의해 분리되는 광 영역을 갖는 다른 특징을 갖도록, 사전결정된 공간 패턴을 갖는 광을 나타내는 데 사용된다. 본 개시의 문맥에서, "패턴화된 광" 및 "구조화된 광"이라는 문구는 동등한 것으로 간주되며, 둘 모두는 윤곽선 이미지 데이터를 도출하기 위해 환자의 머리에 투영되는 광을 식별하는 데 사용된다.
본 개시의 문맥에서, "뷰어", "조작자" 및 "사용자"라는 용어는 동등한 것으로 간주되고, 디스플레이 모니터 상의 다수의 구조화된 광 이미지의 조합으로 형성된 윤곽선 이미지를 보고 조작하는 뷰잉하는(viewing) 시술자, 기술자, 또는 다른 사람을 지칭한다.
"뷰어 명령", "조작자 명령" 또는 "조작자 커맨드"는 뷰어에 의해 입력된 명시적인 커맨드로부터 획득될 수 있거나, 예를 들어, 장비 설정을 행하는 것과 같은 일부 다른 사용자 행위에 기초하여 암시적으로 획득되거나 도출될 수 있다. 디스플레이 모니터 및 키보드를 사용하는 인터페이스와 같은 조작자 인터페이스에 입력되는 입력과 관련하여, 가령, "커맨드" 및 "명령"이라는 용어는 조작자 입력을 지칭하도록 상호 교환가능하게 사용될 수 있다.
본 개시의 문맥에서, 단일 투영 광 라인은 "1 차원" 패턴으로 간주되는데, 그 이유는 그 광 라인이, 라인 레이저로부터 투영될 때와 같이 거의 무시할만한 폭을 가지며 그 주 차원인 길이를 가지기 때문이다. 동시에 또는 스캔된 배열로 나란히 투영된 광 라인 중 2 개 이상의 광 라인은 2 차원 패턴을 제공한다. 예시적인 실시예에서, 광 라인은 선형, 곡선 또는 3 차원일 수 있다.
"3 차원 모델", "점군", "3 차원(3-D) 표면" 및 "메시"라는 용어는 본 개시의 문맥에서 동의어로 사용될 수 있다. 고밀도의 점군은 점군을 형성하기 위한 볼륨 이미징 기술 분야의 숙련자에게 익숙한 기술을 사용하여 형성되며, 일반적으로 점군으로부터 표면 특징에 대응하는 정점을 식별하는 방법과 관련된다. 따라서, 고밀도의 점군은 하나 이상의 반사 이미지로부터 재구성된 윤곽선 데이터를 사용하여 생성된다. 고밀도의 점군 정보는 치아 및 잇몸 표면에 대한 고밀도의 다각형 모델을 위한 토대로서 기능한다.
본 개시에 따르면, "기하학적 프리미티브(geometric primitive)"라는 문구는 이미지의 영역을 나타내기 위해 조작자가 입력할 수 있는 기본적인 2 차원 기하학적 형상을 지칭한다. 예로서 제한 없이, 기하학적 프리미티브는 선, 곡선, 점, 및 다른 개방된 형상 뿐만 아니라, 원, 폐곡선, 직사각형 및 정사각형, 다각형 등과 같이, 조작자에 의해 형성될 수 있는 폐쇄형 형상을 포함할 수 있다.
본 개시의 실시예는 치아 및 턱 구조의 시각화를 위한 다수의 CBCT 스캔의 필요성을 제거하는 데 도움을 줄 수 있는 예시적인 방법 및/또는 장치를 제공한다. 예시적인 방법 및/또는 장치 실시예는, 예를 들어, 교정 치료의 다양한 단계에서 치근 포지션을 추적하는 능력을 갖는 광학 구강내 스캔과 단일 CBCT 볼륨을 결합시키는 데 사용될 수 있다. 이를 달성하기 위해, 구강내 스캔은 세분화되어, 구강내 스캔으로부터 노출된 부분, 가령, 개개의 치관이 CBCT 볼륨으로부터 세분화되는 개개의 치아 및 치근 구조와 정렬될 수 있다.
도 1은 구조화된 광 패턴(46)을 사용하여 투영하고 이미징하기 위한 이미징 장치(70)를 나타내는 개략도이다. 이미징 장치(70)는 본 개시의 일 실시예에 따른 이미지 획득을 위한 핸드헬드 카메라(24)를 사용한다. 제어 논리 프로세서(80), 또는 카메라(24)의 일부일 수 있는 다른 유형의 컴퓨터는 구조화된 광을 생성하고 이미징 센서 어레이(30)의 동작을 제어하는 조명 어레이(10)의 동작을 제어한다. 치아(22)로부터와 같이 표면(20)으로부터의 이미지 데이터는 이미징 센서 어레이(30)로부터 획득되어 메모리(72)에 저장된다. 이미지를 획득하는 카메라(24) 컴포넌트와 신호 통신하는 제어 논리 프로세서(80)는 수신된 이미지 데이터를 처리하고 메모리(72)에 매핑을 저장한다. 그 다음, 메모리(72)로부터의 최종 이미지는 선택적으로 렌더링되어 디스플레이(74) 상에 디스플레이된다. 메모리(72)는 또한 디스플레이(74) 이미지 콘텐츠를 일시적으로 저장하기 위한 디스플레이 버퍼를 포함할 수 있다.
표면의 프린지 투영 이미징에서, 소정의 각도의 라인의 패턴은 조명 어레이(10)로부터 객체의 표면을 향해 투영된다. 그런 다음, 표면에서 투영된 패턴은, 윤곽선 이미지로서 다른 각도로 뷰잉되며, 삼각 측량을 이용하여 윤곽선의 모양을 기반으로 표면 정보를 분석한다. 새로운 위치에서 추가 측정을 얻기 위해 투영된 패턴이 점진적으로 공간상으로 시프트되는 위상 시프팅은 일반적으로 프린지 투영 이미징의 일부로서 적용되며, 윤곽선 이미지에서 표면의 윤곽선 매핑을 완료하고 전체 해상도를 높이는 데 사용된다.
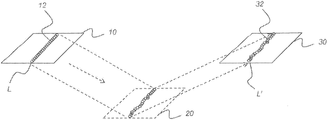
도 2의 개략도는 단일 광 라인(L)의 예를 통해, 핸드헬드 카메라 또는 다른 휴대용 이미징 디바이스를 사용하여 표면 윤곽선 정보를 획득하는 데 패턴화된 광이 어떻게 사용되는지를 개략적으로 도시한다. 조명 어레이(10)가 표면(20) 상으로 광 패턴을 지향시키고 라인(L')의 대응하는 이미지가 이미징 센서 어레이(30) 상에 형성됨에 따라 매핑이 획득된다. 이미징 센서 어레이(30) 상의 각 픽셀(32)은 표면(20)에 의한 변조에 따라 조명 어레이(10) 상의 대응 픽셀(12)에 매핑된다. 도 2에 나타낸 바와 같이, 픽셀 포지션의 시프트는 표면(20)의 윤곽선에 대한 유용한 정보를 산출한다. 도 2에 도시된 기본 패턴은 다양한 조명 소스 및 시퀀스를 사용하고 하나 이상의 상이한 유형의 센서 어레이(30)를 사용하여, 다수의 방식으로 구현될 수 있다는 것을 이해할 수 있다. 조명 어레이(10)는 텍사스주 달라스의 텍사스 인스트루먼츠 사의 디지털 광 프로세서(Digital Light Processor, DLP)를 사용하여 제공한 것과 같이, 액정 어레이 또는 디지털 마이크로미러 어레이와 같은, 광 변조에 사용되는 다수 유형의 어레이 중 임의의 것을 이용할 수 있다. 이러한 유형의 공간 광 변조기는 매핑 시퀀스에 필요한 조명 패턴을 변경하기 위해 조명 경로에 사용된다.
도 1 및 도 2에 도시된 배열을 여러 번 복제한 구조화된 광 패턴을 나타내는 이미지를 투영하고 캡처함으로써, 카메라 상의 윤곽선 이미지는 이미지화된 객체의 다수의 표면 포인트를 동시에 찾는다(locate). 이는, 광의 평면(및 또한 수신 카메라)이 측방향으로 이동하여 객체의 외부 표면의 일부 또는 전부를 광의 평면으로 페인팅하는 동안 다수의 샘플 포인트의 수집 프로세스의 속도를 증가시킬 수 있다.
도 3은 다수의 광 라인을 갖는 패턴을 사용하는 표면 이미징의 예를 도시한다. 광 라인 패턴의 점진적 시프트 및 기타 기술은, 표면을 따라 갑작스러운 전환으로 인해 발생하여 각 투영된 라인에 해당하는 세그먼트를 확실하게 식별하는 것을 어렵게 할 수 있는 부정확성 및 혼란을 보완하는 데 도움을 준다. 예를 들어, 도 3에서, 라인 세그먼트(16)가 라인 세그먼트(18) 또는 인접한 라인 세그먼트(19)와 동일한 조명 라인에 있는지를 결정하는 것이 어려울 수 있다.
이미지가 획득되었을 때 객체 관련 좌표계 내에서 카메라의 순간적인 포지션과 광 라인의 순간적인 포지션을 알게 되면, 컴퓨터 및 소프트웨어는 삼각 측량 방법을 사용하여 다수의 조명된 표면 포인트의 좌표를 계산할 수 있다. 평면이 이동하여 객체의 표면의 일부 또는 전체와 결국 교차하게 되면, 증가하는 개수의 포인트의 좌표가 누적된다. 이 이미지 획득의 결과로, 정점의 점군이 식별되고 사용되어 볼륨 내의 표면의 범위를 나타낼 수 있다. 예로서, 도 4는 도 3에 도시된 것과 같은 패턴화된 조명으로부터의 결과를 사용하여 미국 뉴욕주의 로체스터에 소재한 케어스트림 헬스 인코포레이티드(Carestream Heath, Inc.)에 의해 제조된 구조화된 광 이미징 장치인, CS 3500 3-D 카메라로부터 생성된 고밀도의 점군(50)을 도시한다. 이 점군(50)은 치아 표면과 다른 구강내 표면 또는 더 일반적으로는 실제 세계의 객체의 표면 상의 샘플링된 포인트의 물리적 위치를 모델링한다. 다양한 해상도가 획득될 수 있다. 도 4의 예는 예시적인 100 미크론의 해상도를 도시한다. 점군 내의 포인트는 객체의 3 차원 표면 상의 실제 측정된 포인트를 나타낸다.
표면 구조는 인접한 정점이 라인 세그먼트에 의해 연결된 다각형 메시를 형성함으로써 점군 표현으로부터 근사화될 수 있다. 한 정점의 경우, 그 인접한 정점은 유클리드 거리로 그 정점에 가장 가까운 정점이 된다.
예로서, 도 5는 삼각형 메시의 간단한 형태로 3-D 다각형 메시 모델(60)을 도시한다. 삼각형 메시는 기본 메시 구조를 형성하며, 기본 메시 구조는 점군으로부터 생성될 수 있고, 디지털 모델로서 사용되어 인접한 경계를 공유하는 삼각형 평면 세그먼트의 형태의 3 차원 객체를 그 대략적인 표면 형상에 의해 표현한다. 삼각형 메시 또는 보다 복잡한 메시 구조와 같은 다각형 메시 모델을 형성하는 방법/장치는 윤곽선 이미징 분야의 당업자에게 잘 알려져 있다. 메시 모델의 다각형 유닛 및 이웃하는 다각형 간의 관계는 치아 경계에서 특징(예를 들어, 곡률, 최소 곡률, 에지, 공간 관계 등)을 추출하기 위해 본 개시의 실시예에서 사용될 수 있다.
구강내 이미징에서, 디지털 모델로부터의 이미지 콘텐츠의 개별 컴포넌트의 세분화는, 예를 들어, 교정 치료 및 크라운, 임플란트 및 다른 보철 장치의 준비를 포함하는 다양한 절차에서 치과 의사에게 중요한 것일 수 있다. 잇몸으로부터 치아를 메시 기반 세분화하고 치아를 서로로부터 메시 기반 세분화하기 위해 다양한 방법이 제안 및 설명되었다. 그러나, 종래의 세분화 솔루션의 결점은 상당한 수준의 조작자 기술 및 고도의 계산 복잡성을 요구한다는 것이다. 치아 요소 및 다른 치열 특징을 세분화하는 문제에 대한 종래의 접근법은 많은 경우에 실망스러운 결과를 낳았다. 본 개시에 따른 예시적인 방법 및/또는 장치 실시예는, 소스 디지털 모델의 유형으로서 다각형 메시 데이터를 이용할 수 있고 하나 초과의 단계에서 동작할 수 있는 세분화를 통해 전술한 문제점을 해결하며, 전술한 단계는, 예를 들어, 첫째, 적어도 디지털 모델의 필요한 세분화의 정밀 또는 개략적 근사화를 제공할 수 있는 자동화된 세분화 알고리즘/절차를 수행하는 단계와, 둘째, 조작자 상호 작용을 가능하게 하여 자동화된 결과에서 관찰된 오류 및 불일치를 개선, 교정 및/또는 정리할 수 있어서 완전히 자동화된 방식에서는 달성하기 어려운 매우 정확한 결과를 산출할 수 있지만 조작자 시간 또는 기술 수준 및/또는 필요한 컴퓨터 리소스에 대해 커다란 요건을 두지 않는 단계를 포함한다. 예시적인 방법 및/또는 장치 실시예들에서의 이러한 하이브리드 접근법은 컴퓨팅 및 이미지 처리 능력과 자동화된 처리의 결과를 체킹, 교정 및 미세 조정하기 위한 조작자 인식을 결합하는 데 도움을 줄 수 있다.
도 6a의 논리 흐름도는 본 개시의 예시적인 실시예에 따라 구강내의 치아와 같은 개별 특징 또는 구강내 요소를 식별하기 위해 치아 메시 세분화 및 디지털 모델의 생성을 위한 하이브리드 시퀀스를 도시한다. 이미지 획득 단계(S100)에서, 환자의 치열의 복수의 구조화된 광 이미지가 포착되어 처리를 위한 윤곽선 이미지 세트를 제공한다. 그 다음, 점군 생성 단계(S110)는 윤곽선 이미지 세트를 사용하여 환자의 치열의 점군을 생성한다. 다각형 메시 생성 단계(S120)는 점군 결과로부터 인접한 포인트를 연결함으로써 다각형 메시를 형성한다. 삼각형 메시는 표면 윤곽선을 근사화하기 위해 쉽게 생성될 수 있는 한 가지 유형의 다각형 메시를 제공하며, 대안으로, 보다 복잡한 다각형 메시 구성이 사용될 수 있다.
도 6a의 시퀀스를 계속 참조하여, 다각형 메시가 제공되면, 세분화 단계(S130)가 실행될 수 있다. 예를 들어, 치아 윤곽 이미지의 경우, 세분화 단계(S130)는 하나의 치아와 다른 치아를 구별할 수 있을 뿐만 아니라 잇몸 조직으로부터 치아를 구별할 수 있다. 그런 다음, 이 초기의 자동화된 세분화 처리의 결과를 나타내는 세분화 결과가 디스플레이될 수 있다. 자동화된 세분화 단계(S130)는 중간 이미지를 제공할 수 있다. 따라서, 자동화된 세분화 단계(S130)는 대량의 세분화 처리를 수행할 수 있지만, 결과의 조작자 검토 및 미세 조정으로부터 추가의 이점을 얻을 수 있다. 자동화된 처리를 위해, 세분화 단계(S130)는 빠른 마칭 분수계(fast-marching watershed) 알고리즘, 소위 스네이크 기반 세분화(Snake-based segmentation)와 같은 다수의 세분화 기술 및 전술한 바와 같은 이미징 분야의 당업자에게 공지된 다른 방법 중 임의의 것을 사용할 수 있다.
도 6a는 또한, 예를 들어, 도 1에 도시된 기본 장치를 사용하여 자동화된 세분화 처리의 결과를 미세 조정하기 위해 중간 이미지와의 뷰어의 상호 작용을 가능하게 할 수 있는 선택적인 반복 루프를 도시한다. 뷰어가, 디스플레이된 결과에 대해, 세분화 결과 중 하나 이상의 뚜렷한 특징을 식별하는 시드 포인트, 시드 라인, 블록 라인, 경계 특징, 또는 다른 마킹을 표시하여 추가의 세분화 미세 조정 및 처리를 가능하게 하는 수락 조작자 명령 단계(S140)가 실행될 수 있다. 뷰어 마크업 명령에 의해 세분화 단계(S130)가 적어도 재차 실행될 수 있는데, 이는 입력된 뷰어 명령으로부터의 입력 마크업(들)을 사용하여 실행된다. 자동 또는 수동 처리의 다양한 단계에서 상이한 세분화 알고리즘이 적용될 수 있음을 이해할 수 있다. 세분화 처리의 최종 결과는, 예를 들어, 유선 또는 무선 네트워크를 통해 컴퓨터 간에 디스플레이, 저장 및 송신될 수 있다.
따라서, 도 6a에 도시된 프로세스는 자동화된 세분화로 하여금, 예를 들어, 잇몸 조직으로부터 치아의 세분화와 같이 보다 쉽게 달성될 수 있는 개략적인 세분화(가령, 제 1 세분화)를 수행하게 할 수 있다. 따라서, 예를 들어, 치아와 잇몸의 분할은 자동화될 수 있다. 일 실시예에서, 치아 및 잇몸의 분할은 자동화된 곡률 기반 방법을 사용할 수 있으며, 이 방법은 메시의 정점의 곡률을 계산하고, 그 후 임계화 알고리즘을 사용하여 큰 네거티브 곡률을 갖는 마진 정점을 식별한다. 교대로, 잇몸으로부터 치아 세분화를 위해 컬러 기반 세분화가 사용될 수 있다. 이러한 유형의 방법은 이미지의 영역으로부터 평균 색조 값을 획득할 수 있고 이미지 콘텐츠를 분할하는 임계 값을 계산할 수 있다.
하이브리드 치아 세분화 시스템을 위한 작업 흐름의 예시적인 실시예가 도 6b의 논리 흐름도에 도시되어 있다. 단계(S120)에서 설명되고 도 4 및 도 5에 도시된 것과 같은 치열 메시를 수신하면, 제어 논리 프로세서(80)(도 1)는 자동화된 세분화 단계(S202)를 개시하며, 이 세분화 단계에서는 완전 자동 치아 세분화 도구를 호출하여 치아 및 잇몸 영역을 묘사하고 개개의 치아 영역을 묘사한다. 완전 자동 치아 세분화 도구는 문헌에 공개되거나 또는 이와는 달리 이미지 처리 분야의 당업자에게 잘 알려진 능동 윤곽선 모델과 같은 예시적인 알고리즘을 사용한다. 치아의 묘사는 개별적으로 세분화된 치아를 효과적으로 생성하지만, 이들 생성된 치아는 불량하게 세분화된 구강내 요소를 포함할 수 있다. 제 1 체킹 단계(S204)는 불량하게 세분화된 구강내 요소에 대해 체킹한다. 단계(S204)에서의 부정확하거나 불완전한 세분화의 체킹은 트레이닝된 인공 지능 알고리즘을 세분화 결과에 적용하는 것과 같이 계산적으로 수행될 수 있거나 또는 뷰어에 의한 시각적인 검사를 따르는 것과 같은 뷰어의 상호 작용에 의해 수행될 수 있다. 예로서, 도 7a는 예시적으로 불량하게 세분화되거나 잘못 세분화된 치아(302)를 도시한다. 도 7a에 도시된 바와 같이, 세분화된 치아 경계(306)는 실제 치아 경계(308)와 정렬되지 않는다.
도 6b의 작업 흐름 프로세스를 여전히 참조하여, 체킹 단계(S204)가 하나 이상의 불량하게 세분화된 치아를 계산적으로 또는 시각적으로 식별하면, 1 차 보조 세분화 단계(S206)가 실행되어 자동화된 세분화 절차를 활성화시키지만 일부 레벨의 조작자 조정을 허용한다. 1 차 보조 세분화 단계(S206)는 파라미터 조정 단계(S210)에서 하나 이상의 파라미터의 조작자 조정을 가능하게 하는 세분화를 위한 알고리즘을 적용한다. 다른 체킹 단계(S208)는 추가적인 세분화 처리가 필요한지를 결정하기 위해 실행된다. 조정 가능한 파라미터는 단계(S210)에서 조작자 명령에 의해 계산적으로 또는 명시적으로 변경될 수 있다. 후속 도면은 파라미터 조정을 위한 예시적인 조작자 인터페이스를 나타낸다.
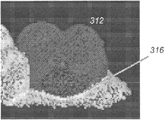
1 차 보조 세분화 단계(S206)에서 이용되는 예시적인 알고리즘은 메시 최소 곡률 기반 세분화 방법과 같은 잘 알려진 기술일 수 있다. 조정 가능한 파라미터는 곡률의 임계 값이 될 수 있다. 단계(S210)의 파라미터 조정의 도움으로, 불량하게 세분화된 치아의 교정이 행해질 수 있다. 도 7b는 치아(312)의 이미지를 도시하며, 이 이미지는 도 7a와 비교하여 세분화된 치아 경계(316)가 실제 경계에 잘 정렬되고 있음을 보여주고 있다.
그러나, 도 6b에 도시된 예시적인 작업 흐름 실시예로부터 명백한 바와 같이, 단계(S206)에서 수행된 치아의 묘사는 여전히 불량하게 세분화된 구강내 요소 또는 특징을 생성할 수 있어서, 결과적으로 반복된 세분화 프로세스가 도움이 될 수 있다. 단계(S208)에서의 불량한 세분화의 체킹은 인공 지능 알고리즘을 세분화 결과에 적용하는 것과 같이 계산적으로 수행될 수 있거나 또는 보다 직접적으로는 사용자에 의해 수행되는 시각적 검사에 의해 수행될 수 있다. 하이브리드 치아 세분화 시스템은 단계(S210)에서 조정되는 조정가능한 파라미터 이외에, 선택적으로 사용자가 치아 영역에 시드 라인과 같은 예시적인 기하학적 프리미티브를 추가하게 하고 치아 간의 또는 치아와 잇몸 간의 블록 라인을 추가하게 하여, 치아 세분화 프로세스를 보조할 수 있게 한다. 도 8a는 메시 이미지(62)에 추가되는, 치아를 마킹하기 위한 예시적인 시드 라인(406)을 도시한다. 도 8b는 메시 이미지(62)에 추가되는, 2 개의 치아 간의 공간을 나타내기 위한 예시적인 블록 라인(408)을 도시한다.
도 6b의 시퀀스에서 3 개의 기본 단계(S206, S208 및 S210)는 완전 자동화된 세분화 단계(S202) 및 체킹 단계(S204)에 후속되는 예시적인 1 차 세분화 루프(54)를 구성한다. 이러한 예시적인 1 차 세분화 루프(54)는 단계(S204)에서 식별된 바와 같이, 자동화된 세분화 단계(S202)의 완전 자동화된 세분화로부터 세분화 오류를 교정하기 위한 것이다. 예시적인 1 차 세분화 루프(54)는 필요에 따라 1 회 이상 수행될 수 있다. 예시적인 1 차 세분화 루프(54)가 성공적일 때, 세분화는 완료될 수 있다.
그러나, 일부의 경우에, 1 차 세분화 루프(54)에 의해 제공되는 것을 넘어서는 추가적인 세분화 처리가 필요하다. 세분화 처리는 치아 군집, 불규칙한 치아 형상, 스캐닝에서의 인공물, 불명료한 치아 윤곽선 및 다른 것들 간의 구별할 수 없는 간극과 같은 다양한 요인에 의해 복잡해질 수 있다. 추가적인 세분화가 필요한 경우, 예시적인 2 차 세분화 루프(56)가 많은 대화식(interactive) 세분화 접근법을 제공하도록 사용될 수 있다. 2 차 세분화 루프(56)는 대화식 세분화 단계(S212), 다른 체킹 단계(S214) 및 조작자 마크업 단계(S216)를 포함할 수 있다. 대화식 세분화 단계(S212)는 다른 영역으로부터 세분화될 이미지의 영역을 나타내기 위해 조작자와 함께 작동하는 세분화 프로세스를 활성화할 수 있다. 대화식 세분화 단계(S212)는 이미지 세분화 기술 분야의 당업자에게 알려진 "빠른 마칭 분수계" 방법과 같은 예시적인 알고리즘에 의해 구현되는 자동화된 시퀀스를 가질 수 있다. 단계(S212)는 활성화되기 전 또는 처리 중에 조작자가 입력한 시드 또는 시드 라인 또는 다른 유형의 기하학적 프리미티브에 의한 치아 영역 이미지의 모집단(population)을 요구할 수 있다. 소정의 예시적인 실시예에서, 선택적인 조작자 조정(예를 들어, 2 차 세분화 루프(56) 또는 단계(212)와 같은 후속 동작)을 위한 시스템 내로 치열 메시가 입력될 때, 시드 라인 또는 다른 특징이 단계(S100, S110 및 S120)에서 자동으로 생성될 수 있다. 또한, 특징, 시드 또는 시드 라인은 사용자에 의해 조작자 마크업 단계(S216)에서 세분화 프로세스에 추가될 수 있다. 단계(S212)로부터의 결과는 단계(S216)에서 사용자에 의해 검사된다. 하이브리드 자동화된/대화식 세분화 처리로부터의 결과는 이후 디스플레이 단계(S220)에서 디스플레이될 뿐만 아니라 다른 컴퓨터에 저장되고 송신될 수 있다.
도 6b의 시퀀스에 이어서, 본 개시의 일부 예시적인 방법/장치는 인간-머신 시너지(human-machine synergy)로 대화식 세분화의 이점을 제공하는 하이브리드 치아 세분화를 제공한다.
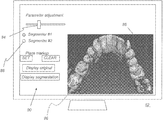
도 9a 내지 도 9c는 본 개시의 특정 실시예에 따라, 치아 메시 세분화 처리를 미세 조정하기 위한 마크업 명령의 검토 및 입력을 위한 시퀀스의 부분에 대한 조작자 인터페이스 스크린(52)을 도시한다. 중간 메시 세분화 결과는 스크린(52) 상의 디스플레이 영역(86)에 도시된다. 세분화 프로세스의 조정을 위한 다수의 컨트롤(controls)(90)은 세분화 처리 알고리즘의 전반적인 능동성(aggressiveness) 또는 다른 파라미터 또는 특성에 대한 레벨을 설정하는 조정 컨트롤(84)과 같이 이용 가능하다. 선택적 선택 컨트롤(88)는 뷰어가 적용될 하나 이상의 세분화 알고리즘을 지정할 수 있게 한다. 이것은 조작자에게 하나의 특정 유형의 세분화 알고리즘 또는 다른 유형의 세분화 알고리즘이 소정의 메시 디지털 모델에 대한 세분화 작업을 수행하는 데 더 성공적인 것으로 보이는지의 여부를 평가하는 기회를 제공한다. 조작자는 결과를 오리지널과 비교하고 파라미터를 조정하여 조작자 마크업을 갖는, 그리고 갖지 않는 연속적인 세분화 시도의 결과를 볼 수 있다.
도 9a는 또한 도 8a와 관련하여 이전에 도시된 바와 같이, 세분화 처리를 교정하거나 미세 조정하기 위한 조작자 시드 라인 명령으로서 입력되는 트레이스 패턴(96)을 도시한다. 본 개시의 실시예에 따르면, 트레이스 패턴(96) 또는 다른 임의의 마킹/기하학적 형태의 조작자 마크업은 종래의 세분화 루틴에 대해 처리하기가 어려울 수 있는 어금니 또는 다른 치아 특징과 같은, 세분화를 위한 특정 특징을 나타내는 시드 포인트(seed point)를 제공하는 데 사용될 수 있다. 시드 마크(Seed marks)는 그 후 이전에 설명한 바와 같은 빠른 마칭 분수계 알고리즘 또는 다른 알고리즘 유형에 대한 입력으로서 사용될 수 있다. 예를 들어, 일부의 경우, 인접한 치아는 서로에 대해 정확하게 세분화되지 않을 수 있으며; 조작자 마크업은 표준 세분화 논리가 잘 수행되지 않는 세분화 처리에 유용한 지침을 제공할 수 있다. 도 9a에 도시된 바와 같이, 조작자는 입력된 마크업이 클리어되거나 세분화 프로세서에 제공될 수 있게 하는 이용 가능한 컨트롤(90)을 가질 수 있다. 도 9b가 보여주는 바와 같이, 컬러 또는 음영은 세분화에 의해 식별된 다양한 치아 또는 다른 구조를 구별하는 데 사용될 수 있다. 추가적인 컨트롤(90)은 또한, 예를 들어, 개개의 치아와 같은 개개의 세분화된 요소를 디스플레이하는 데 사용될 수 있다. 도 9c가 강조 표시하는 바와 같이, 일부 예시적인 실시예에서, 개개의 컨트롤(90)은 개별적으로 또는 조합적으로 사용될 수 있다.
일 실시예에서, 서로로부터 개개의 치아의 세분화는 마진 및 경계 정점을 계산하기 위해 곡률 임계치를 사용할 수 있고, 그 후, 마진 검출과 관련하여 각 치아의 경계를 정의하기 위해 다양한 성장 기술을 사용할 수 있다.
일부 예시적인 실시예에서, 컨트롤(90)은 시드 또는 경계 기하학적 특징을 입력/조정하는 것, 선택된 세분화 절차를 입력/조정하는 것, 세분화하기 위한 객체의 수를 입력/조정하는 것, 선택된 객체를 다시 세분하는 것, 세분화된 객체 디스플레이를 수정하는 것 등을 포함할 수 있지만, 이에 국한되는 것은 아니다.
도 10의 논리 흐름도는 본 출원에 따라 치열 3D 메시로부터 브래킷을 제거하기 위한 작업 흐름의 예시적인 실시예를 도시한다. 도 10에 도시된 바와 같이, 가상 또는 디지털 3D 치열 메시 모델이 단계(1002)에서 획득된다. 예를 들어, 디지털 3D 치열 메시 모델은 구강내 스캐너를 사용하여 획득될 수 있다. 도 11은 단계(1002)에서 획득될 수 있는 예시적인 3D 치열 메시를 도시하는 도면이다. 도 11에 도시된 바와 같이, 3D 치열 메시(1100)는 브래킷(1102), 잇몸(1104) 및 치아(1106)를 포함할 수 있다. 바람직하게는, 도 10의 예시적인 작업 흐름으로부터의 결과는, 3D 치열 메시(1100)로부터의 치아(1106) 및 잇몸(1104)을 포함하지만 브래킷(1102) 및 브래킷(1102)에 의해 이전에 덮여 있던 치아 표면이 정확하게 재구성되지 않은, 3D 치열 메시일 것이다.
도 10에 도시된 바와 같이, 단계(1004 및 1006)는 획득된 치열 3D 메시를 위한 치아 세분화 방법/시스템을 구성한다. 본 명세서에 기술된 바와 같이, 일 실시예에서, 단계(1004 및 1006)는 도 6a에 도시된 치아 메시 세분화를 위한 하이브리드 시퀀스의 유사한 단계에 의해 구현될 수 있다. 대안으로 다른 실시예에서, 단계(1004 및 1006)는 도 6b에 도시된 하이브리드 치아 세분화 방법/시스템의 유사한 단계에 의해 구현될 수 있다.
도 10의 작업 흐름을 계속하면, 브래킷(1102)은 단계(1008)에서 3D 치열 메시(1100)(예를 들어, 치아 표면)로부터 자동적으로 제거된다. 하나의 예시적인 실시예에서, 단계(1006)로부터 생성된 분리된(또는 세분화된) 치아에 대해 이후에 설명되는 브래킷 제거 및 표면 재구성이 개별적으로 수행될 수 있다. 도 12는 3D 치열 메시(1100) 내에 포함된 예시적인 최종 분리된 치아(1202)를 도시하는 도면이다.
단계(1008)에서, 분리된 치아(1202)의 표면으로부터 브래킷을 자동으로 제거하기 위해, 각각의 개별적으로 세분화된 치아(또는 치관)가 검사되고 처리된다. 브래킷(1302)이 제거될 예시적인 세분화된 치아(1202)가 도 13a에 도시되어 있다. 일 예시적인 실시예에서, 자동 브래킷 제거 알고리즘은 먼저 브래킷(1302)의 경계를 검출한다. 이미징 분야의 당업자에게 알려진 다양한 접근법은 3D 치열 메시(1100)에서 브래킷 경계를 검출하는 데 사용될 수 있다. 일 예시적인 실시예에서, 브래킷 경계 검출은 자동화된 곡률 기반 알고리즘을 사용할 수 있으며, 이 알고리즘은 치아 표면의 메시의 정점의 곡률을 계산하고, 그 후 임계화 알고리즘을 사용하여 큰 네거티브 곡률을 갖는 마진 정점을 식별한다. 도 13a에 도시된 바와 같이, 이들 식별된 마진 정점은 브래킷(1302)을 둘러싸는 폐쇄된 3D 곡선 또는 브래킷 경계(1303)(또는 브래킷의 경계 정점)를 형성한다. 그 후, 폐쇄된 3D 경계 내의 메시 정점이 3D 치열 메시(1100)에서 제거되어, 치아 표면 상에 홀(1304)을 생성하게 된다. 도 13b는 브래킷(1302)이 제거된 예시적인 세분화된 치아(1202)를 도시하는 도면이다. 도 13b에 도시된 바와 같이, 브래킷 홀(1304)에는 작은 화이트 패치가 존재할 수 있으며, 이러한 화이트 패치는 브래킷(1302) 자체에 속하지 않지만 오리지널 브래킷 후방의 다른 인공물일 수 있다. 브래킷(1302)이 자동 브래킷 제거 알고리즘에 의해 3D 치열 메시(100)로부터 제거된 후에 이들 인공물이 보일 수 있다.
단계(1010)에서, 브래킷이 제거된 세분화된 치아(1202)의 치아 표면이 자동으로 재구성된다. 이미징 분야의 당업자에게 알려진 다양한 접근법은 3D 치열 메시(1100)에서 홀을 충전하는 데 사용될 수 있다. 자동으로 재구성된 치아 표면(1306)을 갖는 예시적인 세분화된 치아(1202)가 도 13c에 도시되어 있다. 예시적인 실시예에서, 홀 충전 절차(예를 들어, 치아 또는 치관 표면 재구성)는 홀을 충전하기 위한 초기 패치를 생성하는 제 1 단계 및 보다 양호한 품질의 다각형(예를 들어, 삼각형)을 얻기 위해 재구성된 메시를 평활화(smooth)하는 제 2 단계를 포함할 수 있다.
도 13d는 브래킷을 나타내는 메시 부분이 제거된 후에 3D 치관 메시 표면을 형성하는 3D 치열 메시(1100)의 일부를 도시한다. 폐쇄된 다각형(1303')은 (제거된) 브래킷의 경계를 나타낸다. 폐쇄된 다각형(1303')에 의해 둘러싸인 영역(1308)은 브래킷을 제거함으로써 남겨진 홀이다. 먼저, 단계(1010)에서, (예를 들어, 폐쇄된 다각형(1303') 내의) 치아 표면 또는 홀(1308)을 충전하기 위해 초기 패치가 생성된다. 일 실시예에서, 초기 패치는 도 13e에 도시된 패턴을 형성하기 위해 폐쇄된 다각형(1303')의 정점을 연결함으로써 형성된 것과 같은 예시적인 규정된 패턴으로 배열된 복수의 삼각형(1310)을 포함한다. 그 다음, 단계(1010)에서, 초기 패치의 삼각형/다각형(1310)은 추가로 수정되거나 최적화될 수 있다. 삼각형(1310)을 수정하거나 최적으로 배열하는 하나의 예시적인 절차가 도 13f에 도시되어 있으며, 여기서 4 개의 포인트(A, B, C 및 D)는 삼각형(1310)에서 두 개의 삼각형(ABD 및 CDB)을 형성하며, 이들 삼각형은 개선된 삼각형(1310')의 세트 내의 삼각형(ABC 및 CDA)이 되도록 재배열된다. 개선된 삼각형 배열은 길고 얇은 삼각형을 줄이거나 피할 수 있다.
단계(1010)의 제 2 부분에서, 초기 패치를 갖는 3D 메시는 더 나은 품질을 얻기 위해 평활화될 수 있다. 일 실시예에서, 단계(1010)의 제 2 부분은 로컬 정보를 전역적으로 사용하여 초기 패치에서 생성된 포인트의 포지션을 교정할 수 있다. 따라서, 초기 패치(예를 들어, 홀(1303') 내의 삼각형(1310, 1310') 및 도 13d의 홀(1308')을 둘러싸는(또는 인근의) 삼각형(1312)과 같은 주변 영역(surrounding regions)을 포함하는 3D 메시는 각 메시 정점의 위치를 그 인접 정점의 기하학적 중심으로 조정하는 라플라시안 평활화 방법을 사용하여 평활화될 수 있다.
예를 들어, 메시 평활화의 구현예는 Wei Zhao 등에 의한 "삼각형 메시를 위한 강력한 홀 충전 알고리즘(A robust hole-filling algorithm for triangular mesh)"에 기술되며, 이는 Dirichlet 경계 조건을 가진 Poisson 방정식을 사용하여 패치 미세 조정 알고리즘을 구현할 수 있다. Poisson 방정식은 다음과 같이,  로 공식화되며, 여기서, f 는 미지의 스칼라 함수이며,
로 공식화되며, 여기서, f 는 미지의 스칼라 함수이며,  는 라플라시안(Laplacian) 연산자이며, h는 유도 벡터 필드(guidance vector field)이며, div(h)는 h의 발산이며, f * 는 경계 조건을 제공하는 알려진 스칼라 함수이다. Wei Zhao의 논문에서 이산 삼각형 메시에 대한 유도 벡터 필드는 구분 상수 벡터 함수(piecewise constant vector function)로 정의되며, 그 함수의 도메인은 메시 표면 상의 모든 포인트의 세트이다. 상수 벡터는 각 삼각형에 대해 정의되며, 이 벡터는 삼각형과 동일 평면 상에 있다.
는 라플라시안(Laplacian) 연산자이며, h는 유도 벡터 필드(guidance vector field)이며, div(h)는 h의 발산이며, f * 는 경계 조건을 제공하는 알려진 스칼라 함수이다. Wei Zhao의 논문에서 이산 삼각형 메시에 대한 유도 벡터 필드는 구분 상수 벡터 함수(piecewise constant vector function)로 정의되며, 그 함수의 도메인은 메시 표면 상의 모든 포인트의 세트이다. 상수 벡터는 각 삼각형에 대해 정의되며, 이 벡터는 삼각형과 동일 평면 상에 있다.
단계(1012)에서, 자동으로 재구성된 치아 표면(1306)(도 13c 참조)을 갖는 예시적인 세분화된 치아(1202)가 디스플레이될 수 있다. 하나의 예시적인 세분화된 치아(1202)에 대해 기술되었지만, 모든 브래킷이 3D 치열 메시(1100)로부터 제거될 때까지 단계(1008, 1010 및 1012)가 반복적으로 수행될 수 있다. 이러한 방식으로, 최종 교정된 3D 치열 메시(1100)는 각 추가 세분화된 치아 표면이 교정된 후에 단계(1012)에서 디스플레이될 수 있다. 대안으로, 단계(1008 및 1010)는, 최종 교정된 3D 치열 메시(1100)가 단계(1012)에서 디스플레이되기 전에, 3D 치열 메시(1100)의 모든 치아에 대해 수행될 수 있다. 도 20은 예시의 전체적인 최종 교정된 3D 치열 메시를 도시한다.
특정의 예시적인 방법 및/또는 장치 실시예는 치아 표면을 재구성하기 위해 대안의 절차를 사용할 수 있다. 예를 들어, 일 예시적인 실시예에서, 브레이스가 부착되기 전에 치열의 구강내 스캔으로부터의 3D 치열 메시는 치아 표면 재구성에 사용될 수 있다. 다른 예시적인 실시예에서, 환자의 다양한 연령, 치열궁 크기, 민족성, 성별에 대한 풀 마우스 치아 모델 세트(sets of full mouth tooth models)로부터 선정된 특정 치아 모델이 치아 표면 재구성에 사용될 수 있다. 다른 예시적인 실시예에서, 환자로부터의 대응 "미러" 치아가 사용될 수 있다.
도 14는 3D 치열 메시 상에서 브래킷을 제거하는 본 발명의 다른 예시적인 실시예의 작업 흐름을 나타내는 도면이다. 도 10에 도시된 작업 흐름과 도 14에 도시된 작업 흐름 간의 주요 차이점은 도 14에 제시된 작업 흐름에서 치아 세분화가 필요하지 않다는 것이다. 다시, 치아, 브래킷 및 잇몸을 포함하는 3D 치열 메시가 단계(1402)에서 수신된다. 그 다음, 단계(1404)에서, 3D 치열 메시의 브래킷에 관한 명령이 조작자로부터 수신된다.
도 15는 사용자가 3D 치열 메시에서 브래킷을 식별하기 위한 정보를 입력할 수 있게 하는 예시적인 GUI 인터페이스를 디스플레이하는 도면이다. 도 15에 도시된 바와 같이, 하나의 예시적인 GUI 인터페이스(1500)는 노드가 '스네이크' 동작을 위해 사용자에 의해 배치될 수 있게 하며, 이 동작은 입력된 노드에 기초하여 브래킷(1502) 경계를 자동으로 둘러한다. '스네이크' 동작에 의해 생성된 예시적인 브래킷 경계(1503)가 도 15에 도시된다. '스네이크'는 이미지 처리에서, 예를 들어, 노이즈가 있는 2D 이미지에서 객체 윤곽선을 묘사함으로써, 자동 객체 세분화에 자주 사용되는 능동 형상 모델이다. 스네이크의 능동 형상 모델은 객체 추적, 형상 인식, 세분화, 에지 검출 및 스테레오 매칭과 같은 분야에서 사용된다. 스네이크의 능동 형상 모델 또는 능동 윤곽선 모델은 이미징 분야의 당업자에게 알려져 있다.
도 16은 사용자가 도 15의 '실행' 버튼(1504)을 누른 후 3D 치열 메시에서 강조 표시된 경계(1503)에 의해 둘러싸인 정점(1602)을 도시한다. 식별된 정점(1602)은 오리지널 3D 치열 메시로부터 제거되어야 한다. 일 예시적인 실시예에서, GUI 시스템(1500)은 사용자가 중간 결과(1602)를 검사하게 할 수 있고, 충족되면, 사용자는 '컷' 버튼(1506)을 누르고, 그 후, 정점(1602)은 그의 강조 표시(가령, 컬러, 텍스처 등)를 변경하여 이러한 정점이 오리지널 3D 치열 메시에서 제거되어야 함을 나타낸다. 일 예시적인 실시예에서, 단계(1406)에서 조작자 명령에 기초하여 치아 표면으로부터 브래킷을 자동으로 제거하는 것은 조작자가 '컷' 버튼(1506)을 누름으로써 수행될 수 있다.
그 다음, 치아 표면은 단계(1408)에서 충전되거나 재구성된다. 일 예시적인 실시예에서, 단계(1408)는 사용자가 도 15의 '충전' 버튼(1508)을 눌러서 치아 표면을 재구성할 때 수행된다. 단계(1408)는 도 10과 관련하여 본원에 기술된 것과 같은 공지된 알고리즘을 사용하여 수행될 수 있다. 그 후, 결과는 단계(1410)에서 검사를 위해 디스플레이될 수 있다. 도 17은 브래킷이 제거된 후의 재구성된 치아 표면(1702)의 예를 도시한다. 대안으로, 단계(1408)의 결과는 저장될 수 있거나 사용을 위해 네트워크를 통해 원격 컴퓨터에 송신될 수 있다.
다시, 도 14에서, 동작은 3D 치열 메시와 관련하여 복수의 치아에 대해 치아마다 또는 모든 치아에 대해 한번에 동시에 수행될 수 있다. 도 18 내지 도 20은 3D 턱 메시로부터 동시에 모든 브래킷을 완전히 제거한 것을 나타내는 도면이다. 도 18은 치아, 브래킷 및 잇몸을 갖는 3D 치열 메시(1800)를 나타내는 도면이다. 도 19는 제거될 정점(1803)이 강조 표시된 것과 함께 '스네이크' 컷 동작의 중간 결과를 나타내는 도면이다. 도 20은 모든 브래킷이 제거되고 모든 충전 작업이 완료된 후에 각각의 최종 재구성된 치아 표면(1806)을 나타내는 도면이다.
'컷' 버튼을 누르는 것, '충전' 버튼을 누르는 것 그리고 '실행' 버튼을 누르는 것과 같은 상술된 사용자 행위는 예시적인 것임에 주목해야 한다. 실제로, 이러한 행위는 필요하지 않으며 컴퓨터 소프트웨어에 의해 자동으로 수행될 수 있다.
일부 경우에 ,구강내 스캐너에 의해 생성된 3D 치열 모델은 인접한 두 개의 브래킷을 연결하는 와이어를 포함할 수 있다. 이러한 상황에서, 앞서 기술된 실시예는 브래킷 및 와이어를 제거하기에는 불충분하다. 도 21a는 또 다른 예시적인 치열 모델을 나타내는 도면이다. 도 21a에 도시된 바와 같이, 치열 모델(2100)은 브래킷(2102), 잇몸(2104), 치아(2106) 및, 브릿지형 브래킷을 포함하며, 이 브릿지형 브래킷에서 와이어(2108)는 적어도 브래킷(2110)과 브래킷(2112)을 연결한다. 일반적으로, 와이어(2108)는 모든 브래킷(2102)을 연결시킬 것이다. 도 21b에 도시된 바와 같이, 와이어(2108)는 본 출원의 소정의 예시적인 방법 및/또는 장치 실시예에 따라 자동적으로 또는 대화식으로 소거될 수 있다.
도 23은 본 출원의 일 실시예에 따른 치아 메시 표면으로부터 브릿지형 브래킷 제거를 위한 예시적인 시퀀스를 나타내는 논리 흐름도이다. 도 23에 도시된 바와 같이, 브릿지형 브래킷을 갖는 치열 모델은 단계(2302)에서 획득되며, 이 단계에 바로 이어서, "브릿지를 자동으로 단선(breaking)시키는 것"을 포함하는 단계(2304)가 후속된다. 브릿지(또는 와이어)를 자동으로 단선시키는 데 사용될 수 있는 하나의 예시적인 검출 실시예가 다음과 같이 설명된다.
치열 메시 모달(dentition mesh modal)에서 정점(V)이 주어지면, 예시적인 5mm 반경을 가진 가장 가까운 이웃 탐색을 수행하여 이웃 정점(VN)의 세트를 생성한다. VN의 각 정점의 법선을 체킹한다. VN에 적어도 하나의 정점이 존재하고, 그 정점의 법선이 V의 법선과 반대 방향을 가리킨다고 판명되면(예를 들어, 두 법선 벡터의 내적이 -0.9 미만인 경우), V는 와이어(또는 브릿지) 상의 후보 정점이 된다. 이 절차는 전체 메시에 적용되어 복수의 후보 정점을 생성하게 된다. 이러한 후보 정점은 복수의 연결된 영역을 계산하는 데 사용된다. 상기 연결된 영역의 각각은 형상(예를 들어, 와이어) 검출을 위한 분야의 당업자에 의해 일반적으로 사용되는 주성분 분석의 알고리즘을 사용하여 분석된다. 단계(2306)로부터 생성된 예시적인 브릿지(와이어) 검출 결과(2118)가 도 21c에 도시된다. 단계(2306)에서 검출된(예를 들어, 와이어(2108)와 연관된) 3D 치열 메시의 이들 정점은 후속 단계(2306 내지 2308)에서 3D 치열 메시로부터 배제되거나 제거된다.
단계(2306)는 연결 해제된 브래킷을 제거하기 위한 예시적인 자동 또는 대화식 방법을 사용한다. 브래킷이 제거된 치아 표면은 단계(2308)에서 자동으로 재구성되고 그 결과는 단계(2310)에서 검사를 위해 디스플레이된다. 예를 들어, 단계(2306 및 2308)는 각각 도 10 및 도 14에 대해 전술한 바와 같이 수행될 수 있다.
도 22에는 브릿지형 브래킷의 제거에 대한 실제 결과(2204)가 도시되어 있다. 도 22의 표면 재구성된 치아(2210 및 2212)는 브래킷 및 와이어(2108)가 제거되기 전의 도 21a의 브래킷(2110 및 2112)에 대응한다.
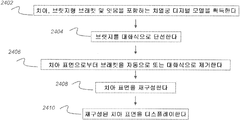
도 24는 브릿지형 브래킷 제거를 다루는 다른 예시적인 방법의 실시 예를 나타내는 논리 흐름도이다. 도 24에 도시된 바와 같이, 브릿지형 브래킷을 갖는 치열 모델은 단계(2402)에서 획득되며, 이 단계에 바로 이어서, "브릿지를 자동으로 단선(breaking)시키는 것" 단계(2404)가 후속된다. 일 실시예에서, 대화식 동작은 단계(2404)에서 얇은 와이어에 속하는 메시 정점을 선택 및 삭제함으로써 인간으로부터의 지원을 받아 얇은 와이어를 효과적으로 소거한다. 일 예시적인 실시예에서, 단계(2404)는 조작자 명령에 기반하여 3D 치열 메시에서 브릿지를 대화식으로 단선시키거나 와이어를 제거하기 위해 "소거", "페인팅"(예를 들어, 와이어를 나타내는 조작자 식별 픽셀), "자동 페인팅", "승인"(예를 들어, 페인팅 또는 자동 페인팅), 및 "소거"하는 선택가능한 조작자 행위를 갖는 GUI를 사용할 수 있다. 그 후, 단계(2406)는 전술한 연결 해제된 브래킷을 제거하기 위해 자동 또는 대화식 방법을 사용한다. 브래킷이 제거된 치아 표면은 전술한 바와 같이 단계(2408)에서 자동으로 재구성될 수 있다. 그 후, 결과는 단계(2410)에서 검사를 위해 디스플레이된다.
본원에 설명된 바와 같이, 3D 치열 모델에서 브릿지형 브래킷을 제거하고 치아 표면을 복원시키는 예시적인 방법 및/또는 장치 실시예는 예시적인 것으로 의도되며, 본 출원은 이에 국한되지 않는다. 예를 들어, 일 예시적인 실시예에서, 획득된 3D 치열 모델에서 인간의 개입 없이 브래킷 및/또는 와이어의 부분을 자동으로 식별하여 식별된 부분을, (예를 들어, 바람직하게는 브래킷 및/또는 와이어 경계를 약간 넘어서) 그 브래킷 및/또는 와이어를 완전히 덮는 영역 내에 성장시키고, 그 영역을 3D 치열 모델 표면에서 제거시키고, 홀 충전 기술을 사용하여 제거된 영역 표면을 복원시킴으로써, 브릿지형 브래킷이 제거될 수 있고 치아 표면이 복원될 수 있다. 일부 예시적인 실시예에서, 홀 충전물은 잇몸의 일부를 충전할 수 있다.
일 실시예와 일관되게, 본 개시는 전자 메모리로부터 저장되고 액세스되는 이미지 데이터에 대한 이미지 획득 및 이미지 데이터 프로세싱을 위한 시스템 기능을 제어하는 저장된 명령어를 갖는 컴퓨터 프로그램을 사용할 수 있다. 이미지 처리 기술 분야의 당업자에 의해 이해될 수 있는 바와 같이, 본 발명의 실시예의 컴퓨터 프로그램은 이미지 프로세서로서 동작하는 퍼스널 컴퓨터 또는 워크스테이션과 같은 적당한 범용 컴퓨터 시스템에 의해 이용될 수 있으며, 그에 따라, 적절한 소프트웨어 프로그램이 제공될 때 프로세서는 본원에서 기술된 바와 같은 데이터를 획득, 처리, 송신, 저장 및 디스플레이하도록 동작할 수 있다. 예를 들어, 네트워크화된 프로세서의 배치를 포함하여, 많은 다른 유형의 컴퓨터 시스템 아키텍처가 본 발명의 컴퓨터 프로그램을 실행하는 데 사용될 수 있다.
본 발명의 방법을 수행하기 위한 컴퓨터 프로그램은 컴퓨터 판독가능 저장 매체에 저장될 수 있다. 이 매체는, 예를 들어; 하드 드라이브와 같은 자기 디스크 또는 착탈식 디바이스 또는 자기 테이프와 같은 자기 저장 매체; 광학 디스크, 광학 테이프 또는 머신 판독 가능 광학 인코딩과 같은 광학 저장 매체; 랜덤 액세스 메모리(RAM) 또는 판독 전용 메모리(ROM)와 같은 고체 상태 전자 저장 디바이스; 또는 컴퓨터 프로그램을 저장하기 위해 사용되는 임의의 다른 물리적 디바이스 또는 매체를 포함할 수 있다. 본 발명의 방법을 수행하기 위한 컴퓨터 프로그램은 또한 인터넷 또는 다른 네트워크 또는 통신 매체를 통해 이미지 프로세서에 접속된 컴퓨터 판독가능 저장 매체 상에 저장될 수 있다. 이미지 데이터 처리 기술 분야의 당업자는 또한 그러한 컴퓨터 프로그램 제품의 등가물이 또한 하드웨어로 구성될 수 있음을 쉽게 인식할 것 이다.
본 개시의 문맥에서 "컴퓨터 액세스 가능 메모리"와 동등한 "메모리"라는 용어는, 이미지 데이터를 저장 및 조작하는 데 사용되며 데이터베이스를 포함한 컴퓨터 시스템에 액세스가능한 임의의 유형의 일시적 또는 보다 영구적인 데이터 저장 작업 공간을 지칭할 수 있다. 메모리는, 예를 들어, 자기 또는 광학 저장 장치와 같은 장기 저장 매체를 사용하는 비휘발성일 수 있다. 대안으로, 메모리는 마이크로프로세서 또는 다른 제어 논리 프로세서 디바이스에 의해 임시 버퍼 또는 작업 공간으로 사용되는 랜덤 액세스 메모리(RAM)와 같은 전자 회로를 사용하는 보다 휘발성의 특성일 수 있다. 예를 들어, 디스플레이 데이터는 일반적으로 디스플레이 디바이스와 직접 연관되는 임시 저장 버퍼에 저장되며 디스플레이된 데이터를 제공하기 위해 필요에 따라 주기적으로 리프레시된다. 이 임시 저장 버퍼는 또한 본 개시에서 사용되는 바와 같이 메모리로 간주될 수 있다. 메모리는 또한 계산 및 기타 처리의 중간 및 최종 결과를 실행 및 저장하기 위한 데이터 작업 공간으로서 사용된다. 컴퓨터 액세스 가능 메모리는 휘발성, 비휘발성, 또는 휘발성 및 비휘발성 유형의 혼합 하이브리드 조합일 수 있다.
본 개시의 컴퓨터 프로그램 제품은 잘 알려진 다양한 이미지 조작 알고리즘 및 프로세스를 이용할 수 있음이 이해된다. 본 발명의 컴퓨터 프로그램 제품 실시예는 구현에 유용한 본원에 구체적으로 도시 또는 설명되지 않은 알고리즘 및 프로세스를 구현할 수 있음이 또한 이해될 것이다. 이러한 알고리즘 및 프로세스는 이미지 처리 기술의 통상적인 기술 범위 내에 있는 종래의 유틸리티를 포함할 수 있다. 이미지를 생성 및 이와는 달리 처리하거나 본 발명의 컴퓨터 프로그램 제품과 함께 동작하는 그러한 알고리즘 및 시스템과 하드웨어 및/또는 소프트웨어의 추가적인 양태는 본원에 구체적으로 도시 또는 기술되지 않았으며, 본 기술 분야에서 알려진 그러한 알고리즘, 시스템, 하드웨어, 컴포넌트 및 요소로부터 선택될 수 있다.
본 명세서에서, 단수의 용어는 특허 문헌에서 일반적으로 사용되는 것으로, "적어도 하나" 또는 "하나 이상"의 임의의 다른 경우 또는 사용과는 독립적으로, 하나 또는 하나 초과를 포함하는 것으로 사용된다. 본 명세서에서, "또는"이라는 용어는, 달리 명시되지 않는 한, "A 또는 B"는 "A이지만 B가 아님", "B이지만 A가 아님" 및 "A 및 B"를 포함하도록, "비 배타적인 또는"을 지칭하는 데 사용된다. 본 명세서에서, "구비" 단어는 "포함" 단어와 동등한 것으로 사용된다. 또한, 이하의 청구항에서, “포함하는” 및 “구비하는”이라는 용어는 개방형이며, 즉 청구항에서 그러한 용어에 속하는 요소에 대해 추가되는 요소를 포함하는 시스템, 디바이스, 제조물 또는 프로세스는 여전히 그 청구항의 범위 내에 속하는 것으로 간주된다.
본 출원에 따른 예시적인 실시예는 본원에 기술된 다양한 특징을 (개별적으로 또는 조합적으로) 포함할 수 있다.
본 발명은 하나 이상의 구현예와 관련하여 설명되었지만, 첨부된 청구범위의 사상 및 범위를 벗어나지 않고 도시된 예에 대한 변경 및/또는 수정이 이루어질 수 있다. 따라서, 현재 개시된 실시예는 모든 면에서 예시적인 것이지 제한적이지 않은 것으로 간주된다. 또한, 발명의 특정의 특징은 몇몇 구현예 중 하나에 대해서만 개시될 수 있었지만, 그러한 특징은 임의의 주어진 또는 특정 기능에 대해 바람직하고 유리할 수 있는 다른 구현예의 하나 이상의 다른 특징과 결합될 수 있다. "적어도 하나"라는 용어는 나열된 항목 중 하나 이상을 선택할 수 있음을 의미하는 데 사용된다. 용어 "약"은, 변경이 예시된 실시예에 대한 프로세스 또는 구조의 부적합을 초래하지 않는 한, 열거된 값이 다소 변경될 수 있음을 나타낸다. 본 발명의 다른 실시예는 본원에 개시된 발명의 명세서 및 실시를 고려하여 당업자에게 명백할 것이다. 본 명세서 및 예는 단지 예시적인 것으로만 간주되어야하며, 본 발명의 진정한 범위 및 사상은 다음의 청구범위에 의해 표시되고, 그 등가물의 의미 및 범위 내에 있는 모든 변경은 그 청구범위에 포함되는 것으로 의도된다.
Claims (12)
- 환자의 치열의 디지털 모델로부터 재구성된 치열의 디지털 모델을 생성하는 방법으로서,
브레이스(brace), 치아 및 잇몸을 포함하는 환자의 치열의 3-D 디지털 메시 치열 모델을 획득하는 단계와,
상기 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 와이어 부분을 제거하여 상기 3-D 디지털 메시 치열 모델을 수정하는 단계와,
상기 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 브래킷 부분을 제거하여 상기 3-D 디지털 메시 치열 모델을 수정하는 단계와,
상기 수정된 3-D 디지털 메시 치열 모델의 치아 표면을 재구성하는 단계 - 상기 치아 표면은 이전에 상기 브레이스의 상기 와이어 부분 및 상기 브래킷 부분에 의해 덮여 있었음 - 와,
상기 재구성된 3-D 디지털 메시 치열 모델을 네트워크를 통해 다른 컴퓨터에 디스플레이, 저장 또는 송신하는 단계를 포함하는
방법.
- 환자의 치열의 디지털 모델로부터 재구성된 치열의 디지털 모델을 생성하는 컴퓨터 구현 방법으로서,
브레이스, 치아 및 잇몸을 포함하는 제 1 3-D 디지털 메시 치열 모델을 획득하는 단계와,
상기 제 1 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 와이어 부분을 제거하여 제 2 3-D 디지털 메시 치열 모델을 생성하는 단계와,
상기 제 2 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 브래킷 부분을 제거하여 제 3 3-D 디지털 메시 치열 모델을 생성하는 단계와,
상기 제 3 3-D 디지털 메시 치열 모델의 치아 표면을 재구성하는 단계 - 상기 치아 표면은 이전에 상기 브레이스의 상기 와이어 부분 및 상기 브래킷 부분에 의해 덮여 있었음 - 와,
상기 재구성된 3-D 디지털 메시 치열 모델을 디스플레이, 송신 또는 저장하는 단계를 포함하는
컴퓨터 구현 방법.
- 제 2 항에 있어서,
상기 브레이스의 와이어 부분을 제거하여 상기 3-D 디지털 메시 치열 모델을 수정하는 것은 상기 3-D 디지털 메시 치열 모델의 상기 브레이스를 복수의 브래킷 섹션으로 분리하는 것인
컴퓨터 구현 방법.
- 제 2 항에 있어서,
상기 치아 표면을 재구성하는 단계는 홀 충전 알고리즘을 사용하는 것이며,
상기 홀 충전 알고리즘은,
패치된 표면을 생성하기 위해 다각형 충전 프로세스를 사용하여 상기 수정된 3-D 디지털 메시 치열 모델의 복수의 홀의 각각을 먼저 충전하는 것과,
상기 재구성된 3-D 디지털 메시 치열 모델을 생성하기 위해 상기 3-D 디지털 메시 치열 모델에서 상기 패치된 표면을 평활화하는 것을 포함하는
컴퓨터 구현 방법.
- 제 2 항에 있어서,
상기 치아 표면을 재구성하는 단계는 상기 브레이스가 부착되기 전의 상기 환자의 이전의 3-D 디지털 메시 치열 모델로부터의 데이터를 사용하는 것인
컴퓨터 구현 방법.
- 제 2 항에 있어서,
상기 재구성된 3-D 디지털 메시 치열 모델은 상기 브레이스를 포함하고 있지 않는 것인
컴퓨터 구현 방법.
- 제 2 항에 있어서,
상기 획득된 메시 모델에 대해 자동 치아 요소 세분화를 수행하고 자동화된 세분화 결과를 디스플레이하는 단계를 더 포함하되, 상기 자동화된 세분화 결과는 환자의 잇몸 조직으로부터 하나 이상의 치아를 구별하는 것이고, 상기 자동화된 세분화 결과는 상기 하나 이상의 치아에서 개개의 치아를 서로로부터 구별하는 것인
컴퓨터 구현 방법.
- 제 7 항에 있어서,
조작자 명령에 따라 상기 자동화된 세분화 결과의 대화식 세분화를 수행하는 단계를 더 포함하되, 상기 자동화된 세분화 결과는 상기 개개의 치아를 서로로부터 구별하는 것인
컴퓨터 구현 방법.
- 제 1 항에 있어서,
상기 제 2 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 브래킷 부분을 제거하여 제 3 3-D 디지털 메시 치열 모델을 생성하는 단계는
상기 제 2 3-D 디지털 메시 치열 모델에 대한 조작자 명령에 따라 상기 브래킷 부분의 대화식 세분화를 수행하는 단계와,
제어 논리 프로세서를 사용하여, 상기 제 2 3-D 디지털 메시 치열 모델로부터 상기 세분화된 브래킷 부분을 제거하는 단계를 포함하는
컴퓨터 구현 방법.
- 제 9 항에 있어서,
상기 조작자 명령은 트레이스된 라인 세그먼트를 포함하는
컴퓨터 구현 방법.
- 제 2 항에 있어서,
상기 3-D 디지털 메시 치열 모델을 획득하는 단계는 핸드헬드 구강내 카메라로부터 다수의 구조화된 광 이미지를 획득하는 단계를 포함하는
컴퓨터 구현 방법.
- 디지털 치열 모델을 생성하도록 구성된 장치로서,
브레이스, 치아 및 잇몸을 포함하는 환자의 치열의 3-D 디지털 메시 치열 모델을 획득하는 수단과,
상기 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 와이어 부분을 제거하여 상기 3-D 디지털 메시 치열 모델을 수정하는 수단과,
상기 3-D 디지털 메시 치열 모델로부터 상기 브레이스의 브래킷 부분을 제거하여 상기 3-D 디지털 메시 치열 모델을 수정하는 수단과,
상기 수정된 3-D 디지털 메시 치열 모델의 치아 표면을 재구성하는 수단 - 상기 치아 표면은 이전에 상기 브레이스의 상기 와이어 부분 및 상기 브래킷 부분에 의해 덮여 있었음 - 과,
상기 재구성된 3-D 디지털 메시 치열 모델을 네트워크를 통해 다른 컴퓨터에 디스플레이, 저장 또는 송신하는 수단을 포함하는
장치.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/US2016/044399 WO2018022054A1 (en) | 2016-07-28 | 2016-07-28 | Method and system for dentition mesh braces removal |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20190037241A true KR20190037241A (ko) | 2019-04-05 |
Family
ID=56609997
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197002635A KR20190037241A (ko) | 2016-07-28 | 2016-07-28 | 치열 메시 브레이스 제거를 위한 방법 및 시스템 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11058514B2 (ko) |
| EP (1) | EP3490489B1 (ko) |
| JP (2) | JP2019521811A (ko) |
| KR (1) | KR20190037241A (ko) |
| DK (1) | DK3490489T3 (ko) |
| ES (1) | ES2864684T3 (ko) |
| WO (1) | WO2018022054A1 (ko) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11559378B2 (en) | 2016-11-17 | 2023-01-24 | James R. Glidewell Dental Ceramics, Inc. | Scanning dental impressions |
| US20200015936A1 (en) | 2016-11-30 | 2020-01-16 | Carestream Dental Technology Topco Limited | Method and system for braces removal from dentition mesh |
| US11896452B2 (en) | 2017-03-16 | 2024-02-13 | Carestream Health, Inc. | Method for virtual setup with mixed dentition |
| US10893299B2 (en) | 2018-07-31 | 2021-01-12 | Intel Corporation | Surface normal vector processing mechanism |
| US10762394B2 (en) | 2018-07-31 | 2020-09-01 | Intel Corporation | System and method for 3D blob classification and transmission |
| US11178373B2 (en) | 2018-07-31 | 2021-11-16 | Intel Corporation | Adaptive resolution of point cloud and viewpoint prediction for video streaming in computing environments |
| US10911799B2 (en) * | 2018-07-31 | 2021-02-02 | Intel Corporation | Video refinement mechanism |
| US11212506B2 (en) | 2018-07-31 | 2021-12-28 | Intel Corporation | Reduced rendering of six-degree of freedom video |
| US10887574B2 (en) | 2018-07-31 | 2021-01-05 | Intel Corporation | Selective packing of patches for immersive video |
| US11057631B2 (en) | 2018-10-10 | 2021-07-06 | Intel Corporation | Point cloud coding standard conformance definition in computing environments |
| CN110211170B (zh) * | 2019-05-23 | 2021-04-09 | 南京维拓科技股份有限公司 | 一种基于数字化模型壁厚分析方法 |
| CN114207731A (zh) * | 2019-06-13 | 2022-03-18 | 奥齿泰有限责任公司 | 用于在牙齿图像上累积显示诊查细目的诊查信息显示装置及方法 |
| US11540906B2 (en) | 2019-06-25 | 2023-01-03 | James R. Glidewell Dental Ceramics, Inc. | Processing digital dental impression |
| US11534271B2 (en) | 2019-06-25 | 2022-12-27 | James R. Glidewell Dental Ceramics, Inc. | Processing CT scan of dental impression |
| US11622843B2 (en) | 2019-06-25 | 2023-04-11 | James R. Glidewell Dental Ceramics, Inc. | Processing digital dental impression |
| US11760030B2 (en) * | 2020-06-23 | 2023-09-19 | Continuous Composites Inc. | Systems and methods for controlling additive manufacturing |
| US11544846B2 (en) | 2020-08-27 | 2023-01-03 | James R. Glidewell Dental Ceramics, Inc. | Out-of-view CT scan detection |
| US11475544B2 (en) * | 2020-10-16 | 2022-10-18 | Adobe Inc. | Automated braces removal from images |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000019929A1 (en) * | 1998-10-08 | 2000-04-13 | Align Technology, Inc. | Computer automated development of an orthodontic treatment plan and appliance |
| US7004754B2 (en) * | 2003-07-23 | 2006-02-28 | Orametrix, Inc. | Automatic crown and gingiva detection from three-dimensional virtual model of teeth |
| US7473097B2 (en) * | 2004-12-17 | 2009-01-06 | 3M Innovative Properties Company | RFID tracking of patient-specific orthodontic materials |
| US7372642B2 (en) * | 2006-02-13 | 2008-05-13 | 3M Innovative Properties Company | Three-channel camera systems with non-collinear apertures |
| WO2009085781A1 (en) * | 2007-12-21 | 2009-07-09 | 3M Innovative Properties Company | Methods of preparing a virtual dentition model and fabricating a dental retainer therefrom |
| US20140067334A1 (en) * | 2012-09-06 | 2014-03-06 | Align Technology Inc. | Method and a system usable in creating a subsequent dental appliance |
| EP2837356A1 (en) * | 2013-08-14 | 2015-02-18 | 3M Innovative Properties Company | An orthodontic bracket and a method of making an orthodontic bracket |
| KR101618233B1 (ko) * | 2014-05-22 | 2016-05-04 | 조선대학교산학협력단 | 맞춤형 치열 교정 장치의 제조방법 및 이에 의해 제조된 맞춤형 치열 교정 장치 |
| US9626462B2 (en) * | 2014-07-01 | 2017-04-18 | 3M Innovative Properties Company | Detecting tooth wear using intra-oral 3D scans |
-
2016
- 2016-07-28 JP JP2019504714A patent/JP2019521811A/ja active Pending
- 2016-07-28 WO PCT/US2016/044399 patent/WO2018022054A1/en unknown
- 2016-07-28 ES ES16747994T patent/ES2864684T3/es active Active
- 2016-07-28 US US16/321,370 patent/US11058514B2/en active Active
- 2016-07-28 EP EP16747994.8A patent/EP3490489B1/en active Active
- 2016-07-28 DK DK16747994.8T patent/DK3490489T3/da active
- 2016-07-28 KR KR1020197002635A patent/KR20190037241A/ko unknown
-
2021
- 2021-09-27 JP JP2021156322A patent/JP7386215B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3490489A1 (en) | 2019-06-05 |
| ES2864684T3 (es) | 2021-10-14 |
| US20190159868A1 (en) | 2019-05-30 |
| WO2018022054A1 (en) | 2018-02-01 |
| WO2018022054A8 (en) | 2019-01-31 |
| DK3490489T3 (da) | 2021-04-19 |
| JP2022000211A (ja) | 2022-01-04 |
| JP2019521811A (ja) | 2019-08-08 |
| JP7386215B2 (ja) | 2023-11-24 |
| US11058514B2 (en) | 2021-07-13 |
| EP3490489B1 (en) | 2021-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11896455B2 (en) | Method and system for braces removal from dentition mesh | |
| JP7386215B2 (ja) | 歯列メッシュ矯正具除去のための方法および装置 | |
| JP7289026B2 (ja) | ハイブリッドメッシュセグメンテーションのための方法及び装置 | |
| US11654003B2 (en) | Tooth scan model calibration | |
| US10204414B2 (en) | Integration of intra-oral imagery and volumetric imagery | |
| US10339649B2 (en) | Method and system for hybrid mesh segmentation | |
| CN114730466A (zh) | 数字模型中牙齿特征的自动检测、生成和/或校正 | |
| US20130329020A1 (en) | Hybrid stitching | |
| US20220012888A1 (en) | Methods and system for autonomous volumetric dental image segmentation | |
| Barone et al. | 3D reconstruction of individual tooth shapes by integrating dental cad templates and patient-specific anatomy |