KR20180123049A - 의료 기기용 제어 유닛 - Google Patents
의료 기기용 제어 유닛 Download PDFInfo
- Publication number
- KR20180123049A KR20180123049A KR1020187027198A KR20187027198A KR20180123049A KR 20180123049 A KR20180123049 A KR 20180123049A KR 1020187027198 A KR1020187027198 A KR 1020187027198A KR 20187027198 A KR20187027198 A KR 20187027198A KR 20180123049 A KR20180123049 A KR 20180123049A
- Authority
- KR
- South Korea
- Prior art keywords
- interface
- control unit
- housing
- hand
- drive unit
- Prior art date
Links
Images

































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0042—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping
- A61B2017/00424—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping ergonomic, e.g. fitting in fist
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00734—Aspects not otherwise provided for battery operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2902—Details of shaft characterized by features of the actuating rod
- A61B2017/2903—Details of shaft characterized by features of the actuating rod transferring rotary motion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2905—Details of shaft flexible
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/291—Handles the position of the handle being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2912—Handles transmission of forces to actuating rod or piston
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
- A61B2017/2925—Pistol grips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
Abstract
의료 기구용 제어 유닛을 제공한다. 제어 유닛은 사용자의 손을 수용할 수 있는 만곡된 상부면을 갖는 하우징을 포함하며, 하우징은 의료 기구에 부착 가능하다. 제어 유닛은 의료 기구의 제 1 기능을 제어하기 위한 손의 엄지와 검지 사이 부분에 의해 맞물릴 수 있는 제 1 인터페이스와 의료 기구의 적어도 제 2 기능을 구동하기 위한 손의 하나 또는 그 이상의 손가락에 맞물릴 수 있는 제 2 인터페이스를 추가로 포함한다.
Description
본 발명은 의료 기기용 제어 유닛에 관한 것으로서, 보다 상세하게는, 자연스러운 손 동작을 전달하여, 복강경 도구와 같은 부착된 의료 기구를 구동하여, 의료 기기의 위치선정과 기능을 정밀하고 세밀하게 제어할 수 있는 제어 유닛 및 통합 사용자 인터페이스에 관한 것이다.
내시경(endoscope) 및 카테터(catheter)와 같은 의료 기기는 기관, 강(cavity), 통로 및 조직을 관찰하거나 치료하기 위하여, 최소 절개 수술에서 광범위하게 사용된다. 일반적으로, 이러한 기기는 체강, 혈관 또는 조직 내 말단에 장착되는 도구(예를 들면, 메스, 그라스퍼 또는 카메라/카메라 렌즈)를 전달하고 위치시키도록 디자인되는 가늘고 긴 기기 바디를 포함한다.
이러한 기기는 조직 벽(예를 들면, 복벽(abdominal wall))에 생성된 작은 절개를 통하여 위치되는 전달 포트를 통하여 전달되고, 해부학적으로 제한적인 공간에서 활용되기 때문에, 상기 의료 기기 또는 그것의 적어도 일부는 신체 외부(의료 기기의 근위 단부(proximal end)에서)에 위치되는 제어부를 사용하여 신체 내부에서 조향 가능하거나(steerable) 조종 가능한(maneuverable) 것이 바람직하다. 그러한 조향은 작동자가 기기를 신체 내로 가이드하고, 해부학적 기준점(anatomical landmark)에서 말단에 장착된 기구를 정확하게 위치시키는 것을 가능하게 한다.
내시경 기구를 위한 다양한 인터페이스는 종래 기술, 예를 들면 미국특허출원 제 2008/0255420 및 제 2012/0041450호와 미국특허 제 7,572,253호에서 설명된다.
그러나, 외과 의사가 부착된 수술 도구를 쉽고 직관적으로 조종하고 제어할 수 있게 하는 인터페이스를 갖는 제어 유닛은 여전히 필요하다.
본 발명의 일 측면에 따르면, 의료 기구용 제어 유닛으로서, (a) 사용자의 손을 수용할 수 있는 만곡된 상부면을 갖는 하우징을 포함하며, 상기 하우징은 상기 의료 기구에 부착가능하며, (b) 상기 하우징의 단부에 회전식으로 부착된 제 1 인터페이스를 포함하며, 상기 제 1 인터페이스는 상기 손의 엄지와 검지 사이의 부분에 맞물릴 수 있으며, 상기 의료 기구의 제 1 기능을 제어하기 위한 것이며, (c) 상기 제 1 인터페이스에 부착되어 함께 회전될 수 있는 구속 장치를 포함하며, 상기 구속 장치는 상기 만곡된 상부면 위에 위치될 때, 상기 손의 뒷쪽에 힘을 인가하며, (d) 상기 제 1 인터페이스에 부착되어, 상기 손의 하나 또는 그 이상의 손가락에 의하여 맞물릴 수 있는 제 2 인터페이스를 포함하며, 상기 제 2 인터페이스는 상기 의료 기구의 적어도 제 2 기능을 구동하기 위한 것인 제어 유닛을 제공한다.
후술하는 본 발명의 바람직한 실시예에 추가된 특징에 따르면, 상기 제어 유닛은 드라이브 유닛을 추가로 포함한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 드라이브 유닛은 상기 하우징으로부터 분리 가능하다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 드라이브 유닛은 상기 제 1 인터페이스 및 제 2 인터페이스를 작동하기 위한 적어도 하나의 모터 및 전원을 포함하여, 상기 의료 기구를 개별적으로 구동시킨다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 제 2 인터페이스는 상기 손의 엄지와 검지를 통하여 동시에 구동가능한 레버를 포함한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 의료 기구는 그라스퍼를 포함하는 관절형 복강경이며, 추가로, 상기 제 1 인터페이스는 상기 복강경의 관절을 제어한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 제 2 인터페이스는 상기 그라스퍼를 제어한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 제 2 인터페이스는 상기 그라스퍼의 개/폐 및 회전을 제어한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 제 1 인터페이스 및/또는 제 2 인터페이스의 활성화/비활성화를 위한 사용자-맞물림 가능한 스위치를 추가로 포함한다.
본 발명의 다른 측면에 따르면, (a) 제어 유닛을 포함하며, 상기 제어 유닛은: (a) (i)사용자의 손을 수용할 수 있는 만곡된 상부면을 갖는 하우징을 포함하며, (ii) 상기 하우징의 단부에 회전식으로 부착된 제 1 인터페이스를 포함하며, 상기 제 1 인터페이스는 상기 손의 엄지와 검지 사이의 부분에 맞물릴 수 있으며, (iii) 상기 제 1 인터페이스에 부착되어 함께 회전될 수 있는 구속 장치를 포함하며, 상기 구속 장치는 상기 만곡된 상부면 위에 위치될 때, 상기 손의 뒷쪽에 힘을 인가하며, (iv) 상기 제 1 인터페이스에 부착되어, 상기 손의 하나 또는 그 이상의 손가락에 의하여 맞물릴 수 있는 제 2 인터페이스를 포함하며, (b) 상기 하우징에 부착되며, 상기 제 1 인터페이스 및 제 2 인터페이스를 통하여 구동될 수 있는 의료 기구를 포함한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 의료 기기는 드라이브 유닛을 포함한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 드라이브 유닛은 상기 하우징으로부터 분리가능하다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 드라이브 유닛은 적어도 하나의 모터 및 전원을 포함한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 드라이브 유닛이 상기 하우징에 부착될 때, 상기 적어도 하나의 모터는 상기 의료 기구를 위한 드라이브 유닛과 맞물린다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 드라이브 유닛은 상기 하우징에 부착될 때, 상기 제 1 인터페이스 및 제 2 인터페이스와 전기적으로 연결된다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 제 2 인터페이스는 상기 손의 엄지와 검지를 통하여 동시에 구동가능한 레버를 포함한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 의료 기구는 그라스퍼를 포함하는 관절형 복강경이며, 추가로, 상기 제 1 인터페이스는 상기 복강경의 관절을 제어한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 제 2 인터페이스는 상기 그라스퍼를 제어한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 제 2 인터페이스는 상기 그라스퍼의 개/폐 및 회전을 제어한다.
후술하는 본 발명의 바람직한 실시예에 추가된 다른 특징에 따르면, 상기 제 1 인터페이스 및/또는 제 2 인터페이스의 활성화/비활성화를 위한 사용자-맞물림 가능한 스위치를 추가로 포함한다.
본 발명은 의료 기구용 제어 유닛을 제공하여, 현재 공지된 구성의 단점을 성공적으로 해결한다. 상기 제어 유닛은, 사용자가 한 손을 이용하여, 예를 들어, 복강경의 이동 및 작동을 동시에 제어할 수 있도록 하는 사용자 인터페이스를 포함한다.
다르게 정의하지 않은 한, 본 발명에서 사용된 모든 기술적 및/또는 과학적 용어는 본 발명이 속한 분야에서 당업자에게 공통적으로 이해되는 것과 동일한 의미를 갖는다. 본 발명에서 설명되는 것과 유사하거나 또는 동등한 방법과 물질이 본 발명의 실시예들의 실행 또는 검사에 사용될 수 있더라도, 바람직한 방법 및/또는 재료는 아래에서 설명된다 상충되는 경우, 정의를 포함하는, 본 발명의 명세서가 우선할 것이다. 더불어, 물질, 방법 및 예시는 단지 설명을 위한 것이며, 필수적으로 한정하는 것으로 의도되지 않는다.
본 발명은 첨부된 도면들을 참조하여, 단지 예시로서 여기에서 설명된다. 이제 도면을 상세히 참조하면, 도시된 특징은 예시이고, 단지 본 발명의 바람직한 실시예를 설명적으로 논의하기 위한 목적이며, 본 발명의 원리와 개념적 측면을 가장 유용하고 쉽게 이해되는 설명으로 고려되는 내용이 제시된다. 이와 관련하여, 본 발명의 기본적인 이해를 위하여 요구되는 것보다 더 상세히 본 발명의 구조적 상세내용을 도시한 어떠한 것도 시도되지 않으며, 통상의 지식을 가진 자에게 자명한 도면이 첨부된 설명은 실제로 구현될 수 있다.
도면에서:
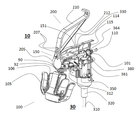
도 1a 내지 1d는 의료 기구(복강경으로 도시된)에 부착된 본 발명의 제어 유닛의 일 실시예를 도시한다. 도 1a는 제어 유닛의 일반적인 도면이고, 도 1b는 상기 제어 유닛을 방해는 외과 의사의 손(손바닥 면)의 영역을 도시한다. 도 1c 내지 1d는 분리된 드라이브 유닛 및 살균 커버(도 1c는 드라이브 유닛으로부터 분리된 것을 도시하고, 도 1d는 드라이브 유닛 상에 부착된 것을 도시한다)를 갖는 제어 유닛을 도시한다.
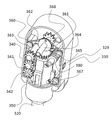
도 2a 내지 2b는 본 발명의 제어 유닛의 내부 구동 메카니즘을 도시한다.
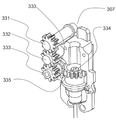
도 3a 내지 3c는 의료 기구의 회전 이팩터 단부(도 3c)에 대한 제어 유닛 메카니즘(도 3a 내지 3b)을 도시한다.
도 4a 내지 4e는 그라스퍼 이팩터 단부(도 4e)의 개폐에 대한 제어 유닛 메카니즘(도 4a 내지 4c)을 도시한다.
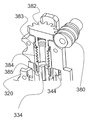
도 5a 내지 5c는 의료 기구의 샤프트의 관절이음(도 5b)에 대한 제어 유닛 메카니즘(도 5a 내지 5c)을 도시한다.
도 6a 내지 6d는 본 발명의 제어 유닛의 분리 가능한 드라이브 유닛을 도시한다.
도 7a 내지 7b는 본 발명의 제어 유닛의 드라이브 유닛, 의료 기구 및 인터페이스 사이의 기계적 연결을 도시한다.
도 8a 내지 8d는 본 제어 유닛의 엄지와 검지 사이 부분의 인터페이스의 관절이음 메카니즘을 도시한다.
도 9a 내지 9d는 본 제어 유닛의 손가락 인터페이스를 도시한다.
도 10a 내지 10e는 드라이브 유닛의 손가락의 작동가능한 메카니즘을 상세히 도시한다.
도 11a 내지 11c는 본 발명의 교시에 따라 구성된 프로토 타입을 도시한다.
도면에서:
도 1a 내지 1d는 의료 기구(복강경으로 도시된)에 부착된 본 발명의 제어 유닛의 일 실시예를 도시한다. 도 1a는 제어 유닛의 일반적인 도면이고, 도 1b는 상기 제어 유닛을 방해는 외과 의사의 손(손바닥 면)의 영역을 도시한다. 도 1c 내지 1d는 분리된 드라이브 유닛 및 살균 커버(도 1c는 드라이브 유닛으로부터 분리된 것을 도시하고, 도 1d는 드라이브 유닛 상에 부착된 것을 도시한다)를 갖는 제어 유닛을 도시한다.
도 2a 내지 2b는 본 발명의 제어 유닛의 내부 구동 메카니즘을 도시한다.
도 3a 내지 3c는 의료 기구의 회전 이팩터 단부(도 3c)에 대한 제어 유닛 메카니즘(도 3a 내지 3b)을 도시한다.
도 4a 내지 4e는 그라스퍼 이팩터 단부(도 4e)의 개폐에 대한 제어 유닛 메카니즘(도 4a 내지 4c)을 도시한다.
도 5a 내지 5c는 의료 기구의 샤프트의 관절이음(도 5b)에 대한 제어 유닛 메카니즘(도 5a 내지 5c)을 도시한다.
도 6a 내지 6d는 본 발명의 제어 유닛의 분리 가능한 드라이브 유닛을 도시한다.
도 7a 내지 7b는 본 발명의 제어 유닛의 드라이브 유닛, 의료 기구 및 인터페이스 사이의 기계적 연결을 도시한다.
도 8a 내지 8d는 본 제어 유닛의 엄지와 검지 사이 부분의 인터페이스의 관절이음 메카니즘을 도시한다.
도 9a 내지 9d는 본 제어 유닛의 손가락 인터페이스를 도시한다.
도 10a 내지 10e는 드라이브 유닛의 손가락의 작동가능한 메카니즘을 상세히 도시한다.
도 11a 내지 11c는 본 발명의 교시에 따라 구성된 프로토 타입을 도시한다.
본 발명은 부착된 의료 기구를 조종하고 구동하기 위하여 사용될 수 있는 제어 유닛이다. 제어 유닛은 복강경과 같은 부착된 의료 기구의 이동, 위치 및 기능을 제어하기 위하여 사용될 수 있는 인터페이스를 포함한다.
도면 및 첨부된 설명을 참조하면, 본 발명의 원리 및 구동은 보다 이해가 잘 될 수 있다.
본 발명의 적어도 하나의 실시예를 상세히 설명하기 전에, 본 발명은 이의 적용에서 하기의 설명에 제시되거나 도면에 설명되는 부품의 구성 및 배치의 상세내용에 한정되지 않는다는 것에 이해하여야 한다. 본 발명은 다른 실시예 또는 다양한 방법으로 실행되거나 또는 실시될 수 있다. 또한, 여기서 적용되는 어법 또는 용어는 설명을 위한 것이며, 이를 한정하는 것으로 간주하여서는 안 된다는 것을 이해하여야 한다.복강경 수술에서, 외과의사는 복강경과 같은 의료 기기의 원위 단부 부분(조직 조종 단부, 예를 들면, 그라스퍼를 포함하는)을 체강(예를 들면, 복강)내에 그리고 치료 조직과 인접하게 위치시켜야 한다. 복강경을 정확하게 위치시키기 위하여, 외과의사는, 조향 가능한 위치의 편향을 제어하고 조직 조종 단부를 활성화하는 동안에, 전체 복강경을 공간적으로 지향하도록 하여야 한다.외과의사는 일반적으로 관심있는 조직 부위에서 기기 및 이펙터(effector) 단부의 위치, 조종, 유지 및 작동을 위하여, 수술 도구의 인터페이스(잡을 수 있는 핸들 및 레버)를 사용한다. 현재 사용되는 기기 인터페이스는 이러한 기능성을 제공할 수 있으나, 이는 전체 기기 및 이의 이펙터 단부(복강경 샤프트의 윈위 단부 상에 장착되는 기구)의 조종 능력과 구동 능력 사이의 균형에 의해 제한될 수 있거나, 가파른 학습 곡선에 의해 제한될 수 있기 때문에, 최소 절개 수술 절차를 완료하기 위하여, 외과의사의 입장에서 상당한 시간과 노력이 필요하다.본 발명자들이 실행한 실험은, 복강경과 같은 의료 기구의 모든 기능에 대하여 한 손으로 제어하도록 제공하는 인터페이스는 일반적으로 이동의 복잡성과 인터페이스의 수 때문에 숙달하기가 어렵다. 본 발명자들은 숙달하기 쉽고 외과의사에게 가장 필요한 기능을 제공하는 한 손 제어 유닛의 설계를 착수하였다. 본 발명자들은, 이하에서 더 설명하는 바와 같이, 외과의사가 한 손을 사용하여 복강경과 같은 부착된 의료 기구를 쉽게 조종하고 구동할 수 있게 하는 직관적인 인터페이스를 갖는 소형 경량의 모터화 제어 유닛을 고안하였다.
그래서, 본 발명의 일 측면에 따르며, 의료 기구용 제어 유닛을 제공한다.
본 발명에서 사용된 바와 같이, 구절 “의료 기구”는 체내 또는 체외 수술(예를 들면, 외과수술)에서 사용되는 임의의 기구를 의미한다. 의료 기구는 파지 도구, 절삭 공구 등이 장착된 복강경, 카메라 및/또는 전달/흡입 채널 또는 카테터, 캐뉼라 등이 장착된 내시경일 수 있다.
본 발명의 사용자 인터페이스는 조향 가능한(편향 가능한) 원위 부분 및 그라스퍼 또는 커터와 같은 원위 장착 기구를 갖는 복강경과 함께 사용하기에 특히 적합하다.
복강경은 기관, 강, 통로 및 조직을 관찰하거나 치료하기 위한 최소 절개 수술에 널리 사용된다. 일반적으로, 이러한 기기는 체강, 혈관 또는 조직 내 말단에 장착되는 도구(예를 들면, 메스, 그라스퍼 또는 카메라/카메라 렌즈)를 전달하고 위치시키도록 디자인되는 가늘고 긴 기기 바디를 포함한다.
이러한 기기는 조직 벽(예를 들면, 복벽)에 생성된 작은 절개를 통하여 위치되는 전달 포트를 통하여 전달되고, 해부학적으로 제한적인 공간(예를 들면, 복강)에서 활용되기 때문에, 의료 기기 또는 그것의 적어도 일부는 신체 외부(의료 기기의 근위 단부에서)에 위치되는 제어부를 사용하여 신체 내부에서 조향 가능하거나 조종 가능한 것이 바람직하다. 그러한 조향은 작동자가 기기를 신체 내로 가이드하고, 해부학적 기준점에서 말단에 장착된 기구를 정확하게 위치시키는 것을 가능하게 한다.
조향 가능한 기기에 대한 다양한 예들이 종래에 알려져 있는데, 예를 들어, 미국 특허 2,498,692, 4,753,223, 6,126,649, 5,873,842, 7,481,793, 6,817,974 및 7,682,307호와 미국 특허 출원 공개 20090259141호가 참조된다.
조향 가능한 부분의 편향은 일반적으로 기기의 샤프트를 따라 조향 가능한 부분의 원위 단부로 작동하는 하나 또는 그 이상의 제어 와이어를 통하여 영향을 받는다.
각각의 제어 와이어의 근위 단부는 제어 유닛에 연결될 수 있어서, 와이어를 당겨, 기기 샤프트를 구부리고, 당겨진 와이어에 대하여, 조향 가능한 부분을 편향시킨다.
기기 이펙터 단부(윈위에 장착된 기구)는 사용자 인터페이스에 의하여 작동되고 제어 유닛에 유사하게 연결된 하나 또는 그 이상의 부가적인 와이어에 의하여 제어된다. 그래서, 조향 가능한 복강경과 같은 조향 가능한 기기의 제어 유닛은 세 가지 개별 기능, 조직 액세스 부위와 관련하여 기기 샤프트의 위치선정(위/아래 좌/우 내/외, 각도), 조향 가능한 부분의 편향 및 원위에 장착되는 기구의 작동, 그라스퍼의 경우 죠(jaws)의 개/폐 및 회전을 제공한다.본 발명의 제어 유닛은 사용자의 손 바닥의 일 부분을 수용하기 위한 만곡된 상부면을 갖는 하우징을 포함한다. 하우징은 사용자의 제어 액션을 드라이브 유닛에 전달하고, 드라이브 유닛으로부터 구동력(driving force)를 부착된 의료 기구에 전달하기 위한 전기 회로를 포함한다.
전기 회로는 외과의사의 손/손가락 움직임을 실시간으로 변환하여, 드라이브 유닛의 모터/액츄에이터에 명령한다. 그래서, 모터/액츄에이터는 구동 메카니즘을 통해서 부착된 의료 기구를 구동한다.
제어 유닛은 하우징의 단부(또한, 여기에서 “제 1 단부” 지칭됨)에 회전식으로 부착된 제 1 인터페이스를 포함한다. 제 1 인터페이스는 손의 엄지와 검지 사이의 부분(엄지와 검지 사이의 손바닥-면의 옴폭 들어간 부분)에 맞물리고, 의료 기구의 제 1 기능을 제어하도록 설계된다.
제어 유닛은 제 1 인터페이스에 부착되어 함께 회전하는 구속 장치를 선택적으로 추가로 포함한다. 구속 장치는, 손이 하우징의 만곡된 상부면 상에 위치될 때, 손의 뒤쪽에 힘을 인가하도록 설계된다.
제어 유닛은 제 1 인터페이스에 부착된 제 2 인터페이스를 추가로 포함한다. 제 2 인터페이스는 손의 하나 또는 그 이상의 손가락(예를 들면, 엄지와 검지)에 맞물리고, 의료 기구의 적어도 제 2 기능을 작동하도록 설계된다.
본 제어 유닛의 사용자 인터페이스는 하기 방법으로 부착된 의료 기구에 대한 한 손 제어를 제공한다:
(i) 의료 기기의 샤프트는, 예를 들어, 손 및 팔의 움직임(주로 손목 관절과 팔꿈치 관절의 굴곡/연장 및 어깨 관절의 회전)을 통해 조직 액세스 부위에 대해서, 안 및 밖, 위 및 아래 그리고 옆으로 이동될 수 있으며,
(ii) 샤프트의 조향 가능한 부분은 제 1 인터페이스의 기울임(옆으로 회전)(주로 손목 관절의 회전)에 의하여 편향될 수 있고,
(iii) 원위에 장착된 조직 조절 단부는 손가락의 움직임(주로 지골 간 관절 및 중수골-지골 관절)을 통해 작동(개/폐 및 회전)될 수 있다.
본 제어 유닛은 조향 가능한 복강경과 같은 의료 기구를 위치시키고 구동하도록 사용될 때, 여러 장점을 제공한다:
(i) 점점 더 자연스러운 조정성 - 복강경은 적은 노력으로 그리고 몸과 팔다리의 극한 조정을 요구하지 않으며 구동될 수 있으며,
(ii) 3가지 기능의 제어 - 복강경의 공간적 위치설정, 샤프트 조향 및 이팩터의 단부 작동,
(iii) 한 손 수술 - 모든 움직임은 손바닥/손등, 엄지와 검지 사이의 부분 및 손가락의 세 가지 인터페이스 영역을 사용하여 한 손으로 제어되며,
(iv) 쉽게 숙달할 수 있는 본능적인 구동 제어를 갖춘 작고 직관적 인 인터페이스 및
(v) 부착된/일체형 의료 기구를 제어하는 데 사용할 수 있다.
이제 도면을 참조하면, 도 1a는 여기서 제어 유닛(10)으로 지칭된 본 제어 유닛을 도시한다.
도 1a는 손의 바닥 부분(도 1b에 도시)을 수용하도록 설계된 만곡된 상부면(331)을 갖는 하우징(330)을 포함하는 제어 유닛(10)을 도시한다. 의료 기구(30)는 하우징(330)의 바닥면에 위치한 커플러(320)를 통하여, 하우징(330)에 부착되는 것을 보여준다. 의료 기구(30)는 전기 플러그(318)로부터 제공된 투열(diathermia) 기능을 포함할 수 있다.
하우징(330)(및 후술하는 인터페이스(100, 150))은 가공(machining), 3D 프린팅 및/또는 주조/성형 제조 접근법을 사용하여 폴리머 및/또는 합금으로부터 제조될 수 있다. 하우징(330)은 10 내지 40 mm 너비, 10 내지 40 mm 깊이 및 약 60 내지 100 mm 높이일 수 있다. 만곡된 상부면(331)은 10 내지 60 mm의 곡률 반경을 가질 수 있다.
제 1 인터페이스(150)(또한, 여기서 인터페이스(150)라고도 지칭됨)는 하우징(330)의 전방 단부에 회전식으로 부착되며 좌우로 기울어 질 수 있다. 인터페이스(150)는 손의 엄지와 검지 사이 부분(도 1b에 도시)에 맞물리도록 설계되어, 손목 관절이 옆으로 회전하여 제 1 인터페이스가 60 내지 120 도의 아크로 기울어진다. 배면 유지 장치(200)는 제 1 인터페이스(150)에 부착되어 함께 회전하고, 손바닥 부분을 하우징(330)의 만곡된 상부면(331)에 대해 구속하도록 설계된다.
인터페이스(150)가 일 측면으로 기울어지면, 의료 기구(30)의 관절(308)(그라스퍼(302)와 함께 나타낸 복강경 샤프트(310))이 대향되어 편향된다. 관절(308)의 편향 각도가 제 1 인터페이스(150)의 기울어짐 각도에 직접적으로 대응하거나, 기울어짐 각도에 대하여, 편향 각도가 증가/감소되어 대응할 수 있도록 제어 유닛(10)은 설계된다.
제어 유닛(10)은 사용자의 엄지와 검지 부분(도 1b에 도시)에 맞물릴 수 있는 제 2 인터페이스(100)(여기서, 인터페이스(100)라고도 지칭됨)를 추가로 포함한다. 인터페이스(100)는 인터페이스(150)에 부착되어 함께 회전한다. 인터페이스(100)는 엄지와 검지의 개방 및 폐쇄애 의하여, 그라스퍼(302)와 같은 조직 이팩터 단부가 개방되거나 폐쇄되도록 작동할 수 있다.
제어 유닛(10)은 의료 기구(30)의 샤프트(310)의 길이를 따라 연장된 제어 와이어에 부착 가능한 드라이브 메카니즘을 포함한다. 드라이브 메카니즘은 차례로 샤프트 편향 및 그라스퍼 개폐 및 회전하도록 작동하는 와이어를 작동한다.
드라이브 메카니즘은 수동으로 구동(예를 들면, 레버를 통해서 인터페이스(100 및 150)에 직접적으로 연결됨)될 수 있거나, 하우징(330)에 제거될 수 있도록 부착 가능한 드라이브 유닛(500)에 의하여 구동된다. 드라이브 유닛(500)은 모터/액츄에이터 및 전원(배터리)을 포함하고, 이를 둘러싼 살균 가능한 커버(600)를 설치함으로써 재사용될 수 있다. 부착된 의료 기구(30) 뿐만 아니라 하우징(330), 인터페이스(100, 150)는 일회용(disposable)일 수 있다.
커버(600)(도 1c)는 PC, ABS, PC/ABS 및/또는 서모세트 포토 폴리머(Thermost photo polymer)와 같은 살균 가능한 탄성 재료로 제조된다. 살균된 커버(600)는 드라이브 유닛(500)이 커버(600)의 외부 표면에 닿지 않도록 조심스럽게 장착된다. 커버된 드라이브 유닛(500)은 이후 제어 유닛(10)의 하우징(330)에 결합되고, 커버(600)는 스냅(snap), 버튼(button), 후크(hook) 등과 같은 분리 가능한 커넥터를 통해 하우징(300)에 고정된다. 커버(600)는 드라이브 유닛(500)의 노출된 부분을 그 환경으로부터 분리시켜, 오염의 우려 없이 수술실에서 안전하게 사용할 수 있도록 한다.
제어 유닛(10)을 분해하기 위해, 사용자는 커버(600) 및 드라이브 유닛(500)이 하우징(330)으로부터 제거되도록 커넥터를 간단히 해제한다. 드라이브 유닛(500)은 이후 커버(600)로부터 제거될 수 있고, 다른 수술에서 다른 살균 커버와 함께 재사용될 수 있다.
도 1c는 하우징(330), 인터페이스(100 및 150) 및 분리된 드라이브 유닛(500) 및 살균 커버(600)를 도시한다.
드라이브 유닛(500)은 모터 팩, 주로 전기 회로, 배터리 팩 및 선택적으로 사용자 제어 및 피드백을 위한 스크린, 스피커 및 버튼으로 구성된 제어 유닛을 포함할 수 있다. 모터 팩의 샤프트(들)는 하우징(530)으로부터 돌출된 드라이브 단부(505, 506 및 507)에 맞물린다.
도 1d는 하우징(330)과 드라이브 유닛(500) 사이의 기계적 인터페이스를 도시한다. 하우징(330)의 드라이브 메카니즘의 일 부분을 형성하는 소켓(305, 306 및 307)은 하우징(330) 후방 면에 도시된다. 드라이브 유닛(500)과 하우징(330)이 결합될 때, 드라이브 유닛(500)의 하우징(530)으로부터 돌출된 드라이브 샤프트 단부(505, 506 및 507)는 드라이브 메카니즘의 소켓(305, 306 및 307)과 맞물린다.
손가락 인터페이스 메카니즘의 가요성 드라이브 샤프트의 샤프트(110)는 드라이브 유닛(500)의 소켓(510)과 맞물린다. 샤프트(110)는 손가락 인터페이스(100)에 연결되고, 모터 팩을 구동하기 위하여, 손가락 인터페이스(100)에서의 움직임(즉, 개/폐 및 회전)을 드라이브 유닛(500)의 제어 유닛의 센서에 전달한다. 드라이브 유닛(500)이 하우징(330)에 연결되면, 드라이브 유닛(500)의 전기 접촉부(115 및 515)는 모드 버튼(312) (도 1c에 도시됨)으로부터 드라이브 유닛(500)으로 신호를 전송한다.
도 2a는 하우징(330)의 루멘(350) 내의 드라이브 메카니즘을 도시한다. 인터페이스(100)는 튜브(92) 및 너트(90)를 통하여 인터페이스(150)의 전방 단부와 연결된다. 가요성 샤프트(101)는 이의 전방 단부에서 인터페이스(100)와 연결되고, 드라이브 메카니즘의 후방 측면에서 튜브(92) 및 너트(90)를 통해서 동작한다. 샤프트 헤드(110)는 가요성 샤프트(101)와 연결된다. 케이블(361 및 362) 및 풀리(260)는 샤프트(364)와 함께 회전하여, 부착된 의료 기기의 샤프트의 조향 가능한 부분의 편향을 야기한다.
구속 장치(200)는 피봇 커넥터(205)를 통해 인터페이스(150)의 전방에 연결된다. 인터페이스(150)는 회전 표면(151)을 통해 하우징(330)에 연결된다. 전기 모드 버튼(312)은 접촉부(115)에 버튼(312)을 연결하는 와이어링(114)과 함께 인터페이스(150)의 하부에 위치된다.
도 2b는 조향 가능한 샤프트를 작동시키고 그라스퍼를 작동시키기 위한 드라이브 메카니즘을 도시한다.
하우징(330)의 상부에, 중공 샤프트(364)는 풀리(360) 및 기어(368)에 고정되고, 케이블(361)은 풀리(365 및 367)에 라우팅된다. 커플러(320)은 하우징(330)을 의료 기구(30)의 샤프트(310)에 연결한다(미도시). 기어(340 내지 342)는 드라이브 유닛(500)의 하나의 모터 소켓으로부터 조(jaw) 회전 메카니즘으로 회전을 전달하는 반면, 웜 기어(380)는 회전 운동을 다른 모터 소켓으로부터 죠의 개/폐 메카니즘으로 전달한다. 드라이브 유닛(500)이 하우징 (330)에 결합될 때, 레버(329)는 살균 커버(600)를 고정시킨다.
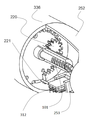
도 3a 내지 3c는 죠의 회전 메카니즘을 상세히 도시한다. 육각-형 너트(334)는 샤프트(303)에 고정된다. 6각-형 너트(334)는 하우징(350)의 하부 단부에 위치한 기어(335)의 개구부(323)를 통해 상하로 자유롭게 슬라이딩하며, 기어(335)의 회전은 육각-형 너트(334)를 회전시킨다.
기어(335)는 차례로 스퍼 기어(331, 332 및 333)에 의하여 회전되는 웜 기어(333)에 의해 회전된다. 스퍼 기어(333)와 웜 기어(335)는 동축에 고정되어 함게 회전하고, 도 3c에 도시한 바와 같이, 샤프트(303)가 회전하면, 죠가 회전한다.
도 4a 내지 4e는 의료 기기(30) 그라스퍼(302)의 조의 개방 및 폐쇄를 작동하기 위한 메카니즘을 상세히 도시한다. 육각 클램프(390)는 상부 부품(384)와 하부 부품(385) 사이에 6각 너트 (334)를 유지한다. 부품(384)과 부품(385) 사이의 클램핑 영역에서, 클램프(390)는 너트 (334)를 전후로 이동시킬 수 있으면서, 너트(334)는 둥글고. 6각 클램프 (390)에 대해 회전할 수 있다. 부품(384)은 기어(382)에 고정된 나사(383)를 수용하기 위한 내부 나사선을 가지며, 기어(382)의 회전은 나사 (383)를 회전시킨다. 부품 (384 및 385)은 평탄면(표면(387)과 동일)을 갖는다. 하우징(330)의 부분 (350)은 클램프(390)의 평탄면과 일치하는 내부 평탄면(353)(도 3b에 도시 됨)을 갖는다. 하우징(35)의 이러한 슬라이딩 평탄면(353)과 클램프(390)의 387은 클램프(390)가 회전하지 못하도록 한다. 그래서, 나사(384)가 회전될 때, 클램프(390)는 그 회전 방향을 따라 전후로 움직인다. 클램프(390)가 전후로 움직할 때, 샤프트(303)를 움직여(도 4e), 조의 개방/폐쇄 움직임을 야기한다.
도 5a 내지 5b는 샤프트(310)의 부위(308)의 관절 이어진 풀리 메카니즘을 상세히 설명한다.
기어(369)는 샤프트(364)에 고정된 기어(368)를 회전시킨다. 풀리(360)는 또한 샤프트(364)에 고정되어, 기어(368)가 회전할 때, 샤프트(364)는 풀리(360)를 따라 회전되도록 한다. 케이블(361 및 362)은 풀리(360)와 연결되서, 풀리(360)가 일 방향으로 회전되면, 하나의 케이블은 당겨지고 다른 케이블은 풀려져, 부품(308)의 편향을 야기한다(도 5b).
도 5c는 관절 풀리(360)로부터, 라우팅(routing) 풀리(363 및 367) 및 풀리(372)를 통해, 케이블 (361 및 362)을 샤프트 (310)의 개구부(326)내로 라우팅하는 것을 도시한다.
도 6a 내지 6d는 제어 유닛(10)의 드라이브 유닛(500)를 상세히 도시한다. 도 6a는 드라이브 유닛(500)의 하우징(530)으로부터 돌출된 드라이브 샤프트 단부(505, 506 및 507) 및 회전 센서 헤드(508)를 도시하는 드라이브 유닛(500)의 정면도이다. 회전 센서 헤드(508)는 인터페이스(150)에 위치된 기어 헤드(308)에 맞물려서 인터페이스(150)의 회전(기울어짐 각도)을 측정한다. 센서(590)의 소켓(591)은 인터페이스(100)에 맞물려서, 손가락의 움직임을 측정할 수 있도록 한다. 드라이브 유닛(500)의 터치 스크린(560)(하우징(530)의 측면에 위치함)은 사용자가 드라이브 유닛(500) 구동 모드 및 배터리 상태에 대한 정보를 습득하도록 하고, 사용자에 의하여 입력된 드라이브 세팅(속도 등)을 확인하도록 한다.
도 6b는 온/오프 스위치(561)를 포함한 드라이브 유닛(500)의 후방 측면을 도시한다. 도 6c 내지 6d는 드라이브 유닛(500)의 내부 구성요소에 대한 정면도 및 후면도이다. 배터리 팩(552)은 드라이브 유닛 하우징(530)의 하부에 위치된다. 배터리 팩(552)은 배터리 팩 하우징(550)에 이중층으로 배열된, 예를 들어 4 CR 123 형 배터리를 포함할 수 있다. 모터(525, 526 및 527)(DC, 브러시리스 또는 스텝형)는 배터리 팩(552)의 상부에 위치하며, 드라이버 회로(PCB) (522)에 연결된다. 제어 유닛(570)은 모터 유닛 위에 위치하고, 센서 유닛(590)은 모터 명령 신호를 생성하기 위해, 센서 신호 (인터페이스 및 모터로부터)를 수신 및 처리하기 위한 전기 회로를 포함하는 PCB(532 및 533) 사이에 위치한다. PCB(532 및 533)는 또한 터치 스크린과 무선 통신 구성요소를 포함한다. PCB(517)는 인터페이스의 접촉부(115)와 맞물리는 2 개의 아크 형태의 접촉부를 포함한다.
도 7a 내지 7b는 제어 유닛(10), 의료 기구(30) 및 드라이브 유닛(500) 사이의 인터페이스를 도시한다. 의료 기구(30)의 일 부분, 외과용 공구의 하우징(330) 및 인터페이스(150) 및 하우징(530)의 일부는 명확성을 위해 이들 도면에서 배제한다. 인터페이스(100)는 가요성 샤프트(101)를 통해 손가락의 개방/폐쇄 움직임을 전달하고, 인터페이스(150)는 엄지와 검지 사이 부분에서 작동하는 회전(옆으로 기울어짐) 움직임이다. 기어(220)는 인터페이스(150)에 고정된 기어(221)에 결합되고, 그래서 인터페이스(150)의 회전은 기어(221)를 회전시킨다. 기어(220)는 샤프트(222)에 고정되어 기어(222)와 함께 회전한다. 샤프트(222)의 원위 단부에 위치한 소켓(308)은 샤프트(222)와 함께 회전 센서(518)의 센서 헤드(508)가 회전하도록 맞물릴 수 있다.
사용자가 인터페이스(150)를 (엄지와 검지 사이 부분의 움직임으로) 기울이면, 스케일된 회전 움직임이 회전 센서(518)로 전달된다. 회전 센서(518)로부터의 신호는 모터 구동으로 드라이브 유닛(500)의 제어 유닛에 의해 처리된다.
도 8a 내지 8c는 인터페이스(150)의 측정 메카니즘을 상세히 도시한다. 기어(220)는 유지 표면(252)의 내부 부분을 통해 인터페이스(150)에 고정된 기어 (221)에 결합된다. 사용자의 손의 엄지와 검지 사이 부분에 의한 인터페이스(150)의 기울어짐은 기어(221)를 회전시키고, 기어(220)(하우징(330)에 회전식으로 연결됨)에 회전을 전달하여, 샤프트(222)가 회전하도록 한다 (도 8a 내지 8b에 도시). 인터페이스(150)는 또한 하우징(530)에 위치한 제어 유닛(570)에 인터페이스(100)의 움직임을 전달하는 가요성 샤프트(101)의 중앙 튜브(253)를 포함한다.
도 8d는 기어(221)(인터페이스(150)와 함께 회전하는)를 통해 인터페이스(150)의 회전을 제어 유닛(570)의 회전 센서 (518)로 전달하는 메커니즘을 보여주는 인터페이스(150)의 단면도이다. 사용자가 인터페이스(150)를 기울이면, 스케일된 회전 움직임은 회전 센서(518)로 전달되고, 회전 센서(518)로부터의 신호는 드라이브 유닛(500)의 모터의 구동으로 제어 유닛에 의하여 처리된다.
도 9a 내지 9d는 제어 유닛(10)의 손가락 인터페이스(100)를 도시한다. 도 9A 내지 9b는 인터페이스(100)을 인터페이스(150)에 연결하는 너트(92)와 샤프트(90)를 도시한다. 인터페이스(100)와 인터페이스(150)를 동시에 사용하기 위하여, 사용자는 인터페이스(150)에 손의 엄지 및 검지 사이 부분을 위치시키고, 레버(161)에 엄지 및 검지를 위치시킨다. 선택적인 외부 날개(162)는 레버(161) 내에서 엄지와 검지를 고정하는데 사용될 수 있다. 레버(161)와 날개(162) 사이의 각도는 힌지(164)를 통해 조절될 수 있다.
공구(302)의 죠를 폐쇄하기 위해서, 사용자는 레버(161)를 폐쇄하여, 레버(161)를 해제하고, 스프링(19)이 레버(161)를 개방하도록 하여, 죠(302)를 개방하고, 하우징(163)이 죠(302)를 회전하는 샤프트(90)를 회전한다.
도 9c 내지 9d는 인터페이스(100)의 내부 메카니즘을 도시한다. 내부 레버(161)는 힌지(165) 주변을 회전하는 브라켓(166)에 고정된다. 중앙 샤프트(101)의 핀(169)은 브라켓(166)의 단부에서 신장 홀(167)을 통해 위치된다. 내부 레버(161)에 의한 브라켓(166)의 회전은 샤프트(101)의 선형 움직임(핀(167)을 통해)을 야기한다. 사용자가 레버(161)에 폐쇄 동력을 인가하면, 샤프트(90)의 원위 부분과 샤프트(10)의 원위 단부(181) 사이에서 샤프트(101)의 직선 부분에 위치된 스프링(91)이 신장된다. 이 폐쇄 동력이 해제되면, 스프링(91)은 선형으로 수축하고, 샤프트(101)는 원래 위치로 복귀한다.
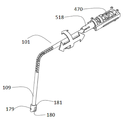
도 10a 내지 10e는 인터페이스(100)에 의해서 구동되는 가요성 샤프트(101)와 드라이브 유닛(500)의 제어 유닛(592)의 움직임 센서 사이의 연결을 도시한다. 자석(470)은 가요성 샤프트(101)의 단부에 고정된다 (도 10a 내지 10b에 도시). 커넥터(518) 및 자성 센서(471)(도 10e)는 샤프트(469)의 주 평면과 평행하게 위치된다(도 10d 내지 10e에 도시). 자석(470)의 선형 움직임을 측정하는 센서(471)는, 모터를 통해 죠의 개-방 움직임 및 위치선정을 제어하기 위하여 사용된 드라이브 유닛(500)의 제어 유닛에 의하여 샘플링된다.
본 발명에서 사용된 용어 "약"은 ±10 %를 의미한다.
본 발명의 추가적인 목적, 이점 및 신규한 특징은 하기 예시를 검토함으로써 당업자에게 명백해질 것이며, 이는 제한하려는 것은 아니다.
예시
이제, 위의 설명들과 함께, 비-제한적 방식으로 본 발명을 설명하는 아래의 예시들이 참조된다.
수동 목적-
피킹
패턴에
기반한
인터페이스 디자인
이전에 출원된 특허 출원(WO2015029041)에서, 출원인은 인터페이스 하우징에 대하여 3 축으로 사용자의 손바닥의 방향을 측정할 수 있는 사용자 인터페이스를 갖는 모터식 관절형 수술 도구를 개시하였다. 오리엔테이션 측정은 전기 신호로 변환되고, 의료 기기 샤프트의 관절 운동 및 이의 이펙터 단부의 구동을 작동하기 위한 명령 신호로 처리된다.
전술한 사용자 인터페이스에 대한 수많은 연구의 결과, 본 발명자는 WO2015029041의 인터페이스가 부착된 의료 기기를 제어하는 데 매우 효율적이지만, 경험이 없는 사용자에게는 이러한 인터페이스를 숙달하는 데 필요한 학습 기간이 상대적으로 길다는 것을 관찰하였다.
수술 기기용 인터페이스를 숙달하는 데 필요한 시간을 실질적으로 감소시키기 위해, 본 발명자들은 그러한 활동에 사용되는 동작 패턴을 해독하기 위한 노력하에, 표면으로부터 물체를 집어드는 임무를 받은 사용자를 연구하였다. 연필을 탁자 위에 놓고, 연구의 각 피실험자는 연필에 손을 올리고, 오디오 신호를 들으면 가능한 한 빨리 연필을 집어들도록 지시 받았다. 15명의 피실험자 모두는 도 11a에 도시된 연필을 집어드는 패턴을 보여주었다.
연필을 집어들기 위해, 피실험자는 탁자 표면과 평행한 방향으로 그들의 손바닥을 회전시켜(왼쪽 이미지), 그들의 엄지와 검지가 연필을 신속히 꽉 잡도록 할 수 있다(오른쪽 이미지).
이러한 연구 결과 의료 기기를 제어하는 것을 숙달하는데 필요한 시간을 단축시키기 위해, 기기의 사용자 인터페이스는 사용자의 손을 지향하게 하여, 손의 평면과 사용자 인터페이스에 부착된 의료 기구의 축을 수직이고, 손바닥이 인터페이스 하우징에 대해서 감거나(roll) 곤두박쳐지지(pitch) 않도록 한다.
이 연구에서 얻은 교훈은 인터페이스 하우징에 대해 사용자의 손바닥이 움직이는 것을 제한하면서, 엄지와 검지 사이 부분과 손가락의 움직임을 측정하는 사용자 인터페이스를 개발하기 위하여 사용되었다.
의료 기기의 프로토 타입(도 11b 내지 11c)을 개발하고, 탁자 표면으로부터 물건을 집어들기 위해서, 인터페이스 제어(전술한 제 1 인터페이스 및 제 2 인터페이스)를 사용하도록 지시받은 사용자 그룹에 대해 테스트를 실시하였다.
이러한 테스트는, 인터페이스 하우징에 대해 손바닥의 움직임을 제거하면 기기 샤프트 관절과 이팩터 단부 구동에 대해 완전히 제어하는 것을 달성하는데 필요한 시간을 단축시켰음을 보여주었다. 흥미롭게도, 이러한 새로운 인터페이스를 사용하는 기간 후, 사용자는 WO2015029041에 기술된 것과 같은 보다 복잡한 인터페이스를 더 빨리 조작할 수 있도록 적응하였다.
명확성을 위하여 개별 실시예의 맥락에서 설명된, 본 발명의 어떤 특징은 또한 단일 실시예에서 조합되어 제공될 수 있다는 것은 자명하다. 명확성을 위하여 개별 실시예의 맥락에서 설명된, 본 발명의 어떤 특징은 또한 단일 실시예에서 조합되어 제공될 수 있다는 것은 자명하다.
본 발명이 특정 실시예와 함께 설명되었으나, 이들의 많은 대안, 변형 및 변경은 통상의 지식을 가진 자에게 자명할 것이라는 것은 분명하다. 따라서, 첨부된 청구항의 의미 및 광범위한 범위에 속하는 그러한 대안, 변형 및 변경 모두를 포함하는 것으로 의도된다. 본 명세서에서 언급된 모든 문헌, 특허 및 특허출원은 각각의 개별 문헌, 특허 또는 특허출원이 특별하고, 개별적으로 여기에 참조로써 통합되는 것으로 나타낸 것과 같은 정도로, 여기에 참조로써 전체가 본 명세서에 통합된다. 더불어, 본 발명서 내의 어떠한 참고문헌의 인용 또는 확인은 그러한 참고문헌이 본 발명에 대한 종래 기술로서 이용가능하다는 인정하는 것으로서 해석되어서는 안 된다.
Claims (21)
- 의료 기구용 제어 유닛으로서,
(a) 사용자의 손을 수용할 수 있는 만곡된 상부면을 갖는 하우징을 포함하며, 상기 하우징은 상기 의료 기구에 부착 가능하며;
(b) 상기 하우징의 단부에 회전식으로 부착된 제 1 인터페이스를 포함하며, 상기 제 1 인터페이스는 상기 손의 엄지와 검지 사이의 부분에 맞물릴 수 있고, 상기 의료 기구의 제 1 기능을 제어하기 위한 것이며;
(c) 상기 제 1 인터페이스에 부착되고 함께 회전될 수 있는 구속 장치를 포함하며, 상기 구속 장치는 상기 만곡된 상부면 위에 위치될 때, 상기 손의 뒷쪽에 힘을 인가하고; 및
(d) 상기 제 1 인터페이스에 부착되어, 상기 손의 하나 또는 그 이상의 손가락에 의하여 맞물릴 수 있는 제 2 인터페이스를 포함하며, 상기 제 2 인터페이스는 상기 의료 기구의 적어도 제 2 기능을 구동하기 위한 것인 제어 유닛. - 제 1 항에 있어서, 드라이브 유닛을 추가로 포함하는 제어 유닛.
- 제 2 항에 있어서, 상기 드라이브 유닛은 상기 하우징으로부터 분리 가능한 제어 유닛.
- 제 3 항에 있어서, 상기 드라이브 유닛은 상기 제 1 인터페이스 및 제 2 인터페이스를 작동하기 위한 적어도 하나의 모터 및 전원을 포함하여, 상기 의료 기구를 개별적으로 구동시키는 제어 유닛.
- 제 1 항에 있어서, 상기 제 2 인터페이스는 상기 손의 엄지와 검지를 통하여 동시에 구동가능한 레버를 포함하는 제어 유닛.
- 제 1 항에 있어서, 상기 제 2 인터페이스는 제 1 인터페이스에 대해서 기울어질 수 있는 제어 유닛.
- 제 1 항에 있어서, 상기 의료 기구는 그라스퍼(grasper)를 포함하는 관절형 복강경(articulating laparoscope)이며, 추가로, 상기 제 1 인터페이스는 상기 복강경의 관절을 제어하는 제어 유닛.
- 제 7 항에 있어서, 상기 제 2 인터페이스는 상기 그라스퍼를 제어하는 제어 유닛.
- 제 7 항에 있어서, 상기 제 2 인터페이스는 상기 그라스퍼의 개방과 폐쇄 및 회전을 제어하는 제어 유닛.
- 제 1 항에 있어서, 상기 제 1 인터페이스 및/또는 제 2 인터페이스의 활성화/비활성화를 위한 사용자-맞물림 가능한 스위치를 추가로 포함하는 제어 유닛.
- (a) 제어 유닛을 포함하며, 상기 제어 유닛은:
(i) 사용자의 손을 수용할 수 있는 만곡된 상부면을 갖는 하우징을 포함하고;
(ii) 상기 하우징의 단부에 회전식으로 부착된 제 1 인터페이스를 포함하며 상기 제 1 인터페이스는 상기 손의 엄지와 검지 사이의 부분에 맞물릴 수 있으며;
(iii) 상기 제 1 인터페이스에 부착되어 함께 회전될 수 있는 구속 장치를 포함하며, 상기 구속 장치는 상기 만곡된 상부면 위에 위치될 때, 상기 손의 뒷쪽에 힘을 인가하고;
(iv) 상기 제 1 인터페이스에 부착되어, 상기 손의 하나 또는 그 이상의 손가락에 의하여 맞물릴 수 있는 제 2 인터페이스를 포함하며; 및
(b) 상기 하우징에 부착되며, 상기 제 1 인터페이스 및 제 2 인터페이스를 통하여 구동될 수 있는 의료 기구를 포함하는 의료 기기. - 제 11 항에 있어서, 드라이브 유닛을 추가로 포함하는 의료 기기.
- 제 12 항에 있어서, 상기 드라이브 유닛은 상기 하우징으로부터 분리 가능한 의료 기기.
- 제 13 항에 있어서, 상기 드라이브 유닛은 적어도 하나의 모터 및 전원을 포함하는 의료 기기.
- 제 14 항에 있어서, 상기 드라이브 유닛이 상기 하우징에 부착될 때, 상기 적어도 하나의 모터는 상기 의료 기구를 위한 드라이브 유닛과 맞물리는 의료 기기.
- 제 14 항에 있어서, 상기 드라이브 유닛이 상기 하우징에 부착될 때, 상기 제 1 인터페이스 및 제 2 인터페이스와 전기적으로 연결되는 의료 기기.
- 제 11 항에 있어서, 상기 제 2 인터페이스는 상기 손의 엄지 및 검지를 통하여 동시에 구동가능한 레버를 포함하는 의료 기기.
- 제 11 항에 있어서, 상기 의료 기구는 그라스퍼를 포함하는 관절형 복강경이며, 추가로, 상기 제 1 인터페이스는 상기 복강경의 관절을 제어하는 제어 유닛.
- 제 18 항에 있어서, 상기 제 2 인터페이스는 상기 그라스퍼를 제어하는 의료 기기.
- 제 18 항에 있어서, 상기 제 2 인터페이스는 상기 그라스퍼의 개방 및 폐쇄와 회전을 제어하는 의료 기기.
- 제 11 항에 있어서, 상기 제 1 인터페이스 및/또는 제 2 인터페이스의 활성화/비활성화를 위한 사용자-맞물림 가능한 스위치를 추가로 포함하는 의료 기기.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662306118P | 2016-03-10 | 2016-03-10 | |
| US62/306,118 | 2016-03-10 | ||
| PCT/IL2017/050307 WO2017154007A1 (en) | 2016-03-10 | 2017-03-09 | Control unit for a medical device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180123049A true KR20180123049A (ko) | 2018-11-14 |
Family
ID=59789039
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187027198A KR20180123049A (ko) | 2016-03-10 | 2017-03-09 | 의료 기기용 제어 유닛 |
Country Status (12)
| Country | Link |
|---|---|
| US (2) | US10993734B2 (ko) |
| EP (1) | EP3426171B1 (ko) |
| JP (1) | JP6995055B2 (ko) |
| KR (1) | KR20180123049A (ko) |
| CN (1) | CN108778163B (ko) |
| AU (1) | AU2017231052A1 (ko) |
| BR (1) | BR112018068122A2 (ko) |
| CA (1) | CA3016514A1 (ko) |
| ES (1) | ES2933123T3 (ko) |
| IL (1) | IL261593A (ko) |
| MX (1) | MX2018010821A (ko) |
| WO (1) | WO2017154007A1 (ko) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3426171B1 (en) | 2016-03-10 | 2022-09-28 | Human Extensions Ltd. | Control unit for a medical device |
| US10799239B2 (en) * | 2016-05-09 | 2020-10-13 | Covidien Lp | Adapter assembly with pulley system and worm gear drive for interconnecting electromechanical surgical devices and surgical end effectors |
| US10695060B2 (en) | 2017-09-01 | 2020-06-30 | RevMedica, Inc. | Loadable power pack for surgical instruments |
| US10966720B2 (en) | 2017-09-01 | 2021-04-06 | RevMedica, Inc. | Surgical stapler with removable power pack |
| US11331099B2 (en) | 2017-09-01 | 2022-05-17 | Rev Medica, Inc. | Surgical stapler with removable power pack and interchangeable battery pack |
| WO2020180488A1 (en) * | 2019-03-01 | 2020-09-10 | RevMedica, Inc. | Surgical stapler with removable power pack and interchangeable battery pack |
| EP3998960A4 (en) | 2019-07-19 | 2022-12-14 | Revmedica, Inc. | SURGICAL STAPLER WITH REMOVABLE POWER SUPPLY |
| CN110974319B (zh) * | 2019-12-24 | 2022-03-11 | 锐志微创医疗科技(常州)有限公司 | 一种基于仿生原理的微创手术器械结构及控制方法 |
| CN113440242A (zh) * | 2021-06-29 | 2021-09-28 | 深圳市玮琦实业有限公司 | 微创手术机器手 |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4306786C1 (de) * | 1993-03-04 | 1994-02-10 | Wolfgang Daum | Chirurgischer Manipulator |
| US5827323A (en) * | 1993-07-21 | 1998-10-27 | Charles H. Klieman | Surgical instrument for endoscopic and general surgery |
| US5556416A (en) * | 1993-10-12 | 1996-09-17 | Valleylab, Inc. | Endoscopic instrument |
| JP2001276091A (ja) * | 2000-03-29 | 2001-10-09 | Toshiba Corp | 医療用マニピュレータ |
| US6902560B1 (en) | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| US6676684B1 (en) | 2001-09-04 | 2004-01-13 | Intuitive Surgical, Inc. | Roll-pitch-roll-yaw surgical tool |
| US6793653B2 (en) | 2001-12-08 | 2004-09-21 | Computer Motion, Inc. | Multifunctional handle for a medical robotic system |
| EP2901959B1 (en) | 2002-12-06 | 2019-02-06 | Intuitive Surgical Operations, Inc. | Flexible wrist for surgical tool |
| US7470276B2 (en) * | 2003-08-19 | 2008-12-30 | Fung-Chao Tu | Multifunctional forceps set and loop ligature co-used therewith |
| US7338513B2 (en) | 2003-10-30 | 2008-03-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| CN101296660A (zh) * | 2004-02-12 | 2008-10-29 | 内布拉斯加大学董事会 | 人体工程学手柄及有节腹腔镜器械 |
| EP1584300A3 (en) | 2004-03-30 | 2006-07-05 | Kabushiki Kaisha Toshiba | Manipulator apparatus |
| US20070208375A1 (en) | 2006-02-23 | 2007-09-06 | Kouji Nishizawa | Surgical device |
| US8721630B2 (en) * | 2006-03-23 | 2014-05-13 | Ethicon Endo-Surgery, Inc. | Methods and devices for controlling articulation |
| US7648519B2 (en) * | 2006-09-13 | 2010-01-19 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| US9421071B2 (en) | 2006-12-01 | 2016-08-23 | Boston Scientific Scimed, Inc. | Direct drive methods |
| US20080255420A1 (en) | 2007-04-10 | 2008-10-16 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| EP3375479B1 (en) | 2007-05-18 | 2023-03-22 | Boston Scientific Scimed, Inc. | Medical drive systems |
| US9050120B2 (en) | 2007-09-30 | 2015-06-09 | Intuitive Surgical Operations, Inc. | Apparatus and method of user interface with alternate tool mode for robotic surgical tools |
| US8338726B2 (en) * | 2009-08-26 | 2012-12-25 | Covidien Ag | Two-stage switch for cordless hand-held ultrasonic cautery cutting device |
| US20090171147A1 (en) * | 2007-12-31 | 2009-07-02 | Woojin Lee | Surgical instrument |
| US8821480B2 (en) | 2008-07-16 | 2014-09-02 | Intuitive Surgical Operations, Inc. | Four-cable wrist with solid surface cable channels |
| FR2948595B1 (fr) * | 2009-07-31 | 2012-07-20 | Dexterite Surgical | Manipulateur a tenue manuelle et articulation de confort |
| FR2948594B1 (fr) * | 2009-07-31 | 2012-07-20 | Dexterite Surgical | Manipulateur ergonomique et semi-automatique et applications aux instruments pour chirurgie mini-invasive |
| US8733612B2 (en) | 2009-08-17 | 2014-05-27 | Covidien Lp | Safety method for powered surgical instruments |
| US20110112517A1 (en) * | 2009-11-06 | 2011-05-12 | Peine Willliam J | Surgical instrument |
| US8521331B2 (en) * | 2009-11-13 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Patient-side surgeon interface for a minimally invasive, teleoperated surgical instrument |
| JP2011147758A (ja) * | 2010-01-22 | 2011-08-04 | Olympus Corp | 処置具 |
| JP2011200593A (ja) * | 2010-03-26 | 2011-10-13 | Terumo Corp | 医療器具 |
| EP2600788B1 (en) * | 2010-08-02 | 2023-07-26 | The Johns Hopkins University | Tool exchange interface and control algorithm for cooperative surgical robots |
| US8828046B2 (en) * | 2010-10-14 | 2014-09-09 | Ethicon Endo-Surgery, Inc. | Laparoscopic device with distal handle |
| EP2645943A1 (en) * | 2010-12-02 | 2013-10-09 | Agile Endosurgery, Inc. | Surgical tool |
| US20120253326A1 (en) * | 2011-03-29 | 2012-10-04 | Tyco Healthcare Group Lp | Articulation of Laparoscopic Instrument |
| US9901412B2 (en) * | 2011-04-29 | 2018-02-27 | Vanderbilt University | Dexterous surgical manipulator and method of use |
| US9017314B2 (en) | 2011-06-01 | 2015-04-28 | Covidien Lp | Surgical articulation assembly |
| US8968312B2 (en) | 2011-11-16 | 2015-03-03 | Covidien Lp | Surgical device with powered articulation wrist rotation |
| US9241731B2 (en) * | 2012-04-09 | 2016-01-26 | Ethicon Endo-Surgery, Inc. | Rotatable electrical connection for ultrasonic surgical instruments |
| GB2509523A (en) * | 2013-01-07 | 2014-07-09 | Anish Kumar Mampetta | Surgical instrument with flexible members and a motor |
| ES2715393T3 (es) * | 2013-09-01 | 2019-06-04 | Human Extensions Ltd | Unidad de control para un dispositivo médico |
| US10149694B2 (en) * | 2013-09-13 | 2018-12-11 | Vanderbilt University | Energy balance mechanism for flexure joint |
| EP3426171B1 (en) | 2016-03-10 | 2022-09-28 | Human Extensions Ltd. | Control unit for a medical device |
-
2017
- 2017-03-09 EP EP17762651.2A patent/EP3426171B1/en active Active
- 2017-03-09 KR KR1020187027198A patent/KR20180123049A/ko not_active Application Discontinuation
- 2017-03-09 AU AU2017231052A patent/AU2017231052A1/en not_active Abandoned
- 2017-03-09 CN CN201780015984.2A patent/CN108778163B/zh active Active
- 2017-03-09 JP JP2018548025A patent/JP6995055B2/ja active Active
- 2017-03-09 ES ES17762651T patent/ES2933123T3/es active Active
- 2017-03-09 WO PCT/IL2017/050307 patent/WO2017154007A1/en active Application Filing
- 2017-03-09 MX MX2018010821A patent/MX2018010821A/es unknown
- 2017-03-09 CA CA3016514A patent/CA3016514A1/en active Pending
- 2017-03-09 BR BR112018068122A patent/BR112018068122A2/pt not_active IP Right Cessation
- 2017-03-09 US US16/081,044 patent/US10993734B2/en active Active
-
2018
- 2018-09-04 IL IL261593A patent/IL261593A/en unknown
-
2021
- 2021-03-30 US US17/216,732 patent/US20210212710A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20190069917A1 (en) | 2019-03-07 |
| CN108778163B (zh) | 2021-05-11 |
| JP6995055B2 (ja) | 2022-01-14 |
| MX2018010821A (es) | 2019-02-07 |
| IL261593A (en) | 2018-10-31 |
| WO2017154007A1 (en) | 2017-09-14 |
| JP2019509806A (ja) | 2019-04-11 |
| CA3016514A1 (en) | 2017-09-14 |
| EP3426171B1 (en) | 2022-09-28 |
| EP3426171A4 (en) | 2019-10-09 |
| CN108778163A (zh) | 2018-11-09 |
| US20210212710A1 (en) | 2021-07-15 |
| AU2017231052A1 (en) | 2018-10-11 |
| US10993734B2 (en) | 2021-05-04 |
| EP3426171A1 (en) | 2019-01-16 |
| ES2933123T3 (es) | 2023-02-01 |
| BR112018068122A2 (pt) | 2019-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210212710A1 (en) | Control unit for a medical device | |
| US11020197B2 (en) | Control unit for a medical device | |
| US9649096B2 (en) | Motorized surgical instruments | |
| JP5859650B2 (ja) | 係合解除可能なハンドル付きの手術器具 | |
| US8231610B2 (en) | Robotic surgical system for laparoscopic surgery | |
| JP2009528150A (ja) | 内視鏡手術のための手術器具 | |
| KR20190113988A (ko) | 수술 도구용 컨트롤러 | |
| JP6824958B2 (ja) | 制御アセンブリを含む医療装置 | |
| JP7372934B2 (ja) | 医療装置のための制御ユニット | |
| KR102202030B1 (ko) | 수술용 로봇 시스템의 조작 장치 | |
| JP2023515085A (ja) | 大腸鏡用制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |