KR20180098260A - 구조형 광 깊이 맵들의 아웃라이어 검출 및 정정을 위한 방법들 및 장치들 - Google Patents
구조형 광 깊이 맵들의 아웃라이어 검출 및 정정을 위한 방법들 및 장치들 Download PDFInfo
- Publication number
- KR20180098260A KR20180098260A KR1020187017584A KR20187017584A KR20180098260A KR 20180098260 A KR20180098260 A KR 20180098260A KR 1020187017584 A KR1020187017584 A KR 1020187017584A KR 20187017584 A KR20187017584 A KR 20187017584A KR 20180098260 A KR20180098260 A KR 20180098260A
- Authority
- KR
- South Korea
- Prior art keywords
- depth
- depth value
- value
- values
- outlier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/521—Depth or shape recovery from laser ranging, e.g. using interferometry; from the projection of structured light
-
- G06K9/03—
-
- G06K9/38—
-
- G06T5/001—
-
- G06T5/007—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/40—Image enhancement or restoration using histogram techniques
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/77—Retouching; Inpainting; Scratch removal
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/90—Dynamic range modification of images or parts thereof
- G06T5/92—Dynamic range modification of images or parts thereof based on global image properties
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/90—Dynamic range modification of images or parts thereof
- G06T5/94—Dynamic range modification of images or parts thereof based on local image properties, e.g. for local contrast enhancement
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/28—Quantising the image, e.g. histogram thresholding for discrimination between background and foreground patterns
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/98—Detection or correction of errors, e.g. by rescanning the pattern or by human intervention; Evaluation of the quality of the acquired patterns
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20004—Adaptive image processing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20021—Dividing image into blocks, subimages or windows
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20182—Noise reduction or smoothing in the temporal domain; Spatio-temporal filtering
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Optics & Photonics (AREA)
- Multimedia (AREA)
- Quality & Reliability (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
Description
도 1 은 기지의 패턴이 장면을 조명하고 3차원 정보를 생성할 깊이 정보를 획득하기 위해 사용되는 감지 시스템의 예를 도시한다.
도 2 는 에러들을 포함하는 예시의 깊이 맵을 도시한다.
도 3 은 합성 코드 마스크를 생성하고 및/또는 그러한 코드 마스크를 투영하도록 구성될 수도 있는 예시의 송신기 디바이스의 블록도를 도시한다.
도 4 는 합성 코드 마스크로부터 깊이 정보를 획득하도록 구성될 수도 있는 예시의 수신기 디바이스의 블록도를 도시한다.
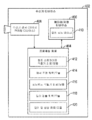
도 5 는 여기에 개시된 에러 정정 방법들 중 하나 이상을 수행하도록 구성된 장치의 하나의 실시형태의 블록도를 도시한다.
도 6 은 각 세그먼트에 대해 깊이의 유효한 범위를 결정하기 위해 생성되는 히스토그램을 갖는, 세그먼트들로 분할되는 예시의 깊이 맵을 도시한다.
도 7 은 글로벌 최소 및 글로벌 최대 깊이 값의 결정을 갖는 예시의 깊이 맵, 및 아웃라이어 깊이 값들이 정정된 후 결과의 깊이 맵을 도시한다.
도 8 은 깊이 맵에서 아웃라이어 깊이 값들을 식별 및 정정하기 위한 방법의 예를 도시하는 플로우챠트이다.
도 9 는 깊이 맵에서 적어도 하나의 아웃라이어 깊이 값을 식별 및 정정하기 위한 장치의 예를 도시하는 블록도이다.


Claims (30)
- 깊이 맵에서 에러들을 정정하기 위한 장치로서,
투영된 시야에서 복수의 코드워드들을 투영하도록 구성된 송신기;
상기 투영된 시야에서 표면으로부터 투영된 상기 코드워드들의 반사를 수신하도록 구성된 수신기; 및
에러 정정 회로를 포함하고,
상기 에러 정정 회로는,
상기 투영된 코드워드들의 수신된 상기 반사에 기초하여 상기 깊이 맵을 생성하고;
상기 깊이 맵을 복수의 세그먼트들로 분할하며;
상기 세그먼트들 각각에서의 하위 퀀타일 깊이 값 및 상위 퀀타일 깊이 값을 결정하고,
(i) 상기 세그먼트들의 하위 퀀타일 깊이 값의 최소값 및 (ii) 상기 세그먼트들의 상위 퀀타일 깊이 값의 최대값에 기초하여 글로벌 깊이 범위를 생성하며;
상기 깊이 맵에서 아웃라이어 깊이 값을 식별하고;
상기 깊이 맵에서의 정보에 기초하여 상기 아웃라이어 깊이 값을 정정하도록
구성된, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 1 항에 있어서,
상기 상위 퀀타일 깊이 값 및 상기 하위 퀀타일 깊이 값은 (i) 히스토그램 퀀타일 계산 및 (ii) 평균 및 분산 계산 중 적어도 하나에 기초하여 결정되며,
상기 계산들 각각은 각 세그먼트에서의 깊이 값들의 범위 및 깊이 값들의 상기 범위의 인접한 서브세트에 기초하며,
상기 인접한 서브세트는 상기 세그먼트에서의 깊이 값들의 밀도를 나타내는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 2 항에 있어서,
상기 깊이 값들의 상기 범위의 인접한 서브세트는 상기 하위 퀀타일 깊이 값 및 상기 상위 퀀타일 깊이 값을 포함하며,
상기 하위 퀀타일 깊이 값은 상기 인접한 서브세트 내에서 최저 깊이 값이고, 상기 상위 퀀타일 깊이 값은 상기 인접한 서브세트 내에서 최고 깊이 값인, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 1 항에 있어서,
상기 송신기는 코드마스크를 통해 광을 전파시키는 것을 통해 상기 복수의 코드워드들을 투영하며,
상기 코드마스크는 복수의 심볼들을 갖는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 1 항에 있어서,
상기 에러 정정 회로는 상기 글로벌 깊이 범위 밖에서 상기 깊이 맵에서 깊이 값을 검출하는 것을 통해 상기 깊이 맵에서 상기 아웃라이어 깊이 값을 식별하는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 1 항에 있어서,
상기 복수의 세그먼트들은 상기 깊이 맵의 중첩 영역들을 포함하는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 1 항에 있어서,
상기 에러 정정 회로는,
상기 아웃라이어 깊이 값에 이웃하는 복수의 깊이 값들을 결정하는 것으로서, 상기 복수의 깊이 값들은 상기 글로벌 깊이 범위 내에 있는, 상기 복수의 깊이 값들을 결정하는 것;
상기 복수의 깊이 값들에 기초하여 제 1 깊이 값을 계산하는 것; 및
상기 아웃라이어 깊이 값을 상기 제 1 깊이 값으로 대체하는 것
을 통해 상기 아웃라이어 깊이 값을 정정하는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 7 항에 있어서,
상기 제 1 깊이 값은 상기 복수의 깊이 값들의 평균인, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 1 항에 있어서,
상기 에러 정정 회로는,
상기 아웃라이어 깊이 값에 이웃하는 복수의 깊이 값들을 결정하는 것으로서, 상기 복수의 깊이 값들은 상기 글로벌 깊이 범위 내에 있는, 상기 복수의 깊이 값들을 결정하는 것;
상기 이웃하는 깊이 값들의 수평 그래디언트 및 수직 그래디언트 중 적어도 하나를 계산하는 것;
상기 수평 그래디언트 및 상기 수직 그래디언트 중 적어도 하나에 기초하여 제 1 깊이 값을 계산하는 것; 및
상기 아웃라이어 깊이 값을 상기 제 1 깊이 값으로 대체하는 것
을 통해 상기 아웃라이어 깊이 값을 정정하는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 1 항에 있어서,
상기 복수의 세그먼트들에서의 각 세그먼트의 사이즈는 사용자 구성가능한, 깊이 맵에서 에러들을 정정하기 위한 장치. - 깊이 맵핑 시스템에 의해 동작가능한, 깊이 맵에서 에러들을 정정하기 위한 방법으로서,
송신기를 통해, 투영된 시야에서 복수의 코드워드들을 투영하는 단계;
수신기에서, 상기 투영된 시야에서 표면으로부터 투영된 상기 코드워드들의 반사를 수신하는 단계;
에러 정정 회로를 통해, 상기 투영된 코드워드들의 수신된 상기 반사에 기초하여 상기 깊이 맵을 생성하는 단계;
상기 에러 정정 회로를 통해, 상기 깊이 맵을 복수의 세그먼트들로 분할하는 단계;
상기 에러 정정 회로를 통해, 상기 세그먼트들 각각에서의 하위 퀀타일 깊이 값 및 상위 퀀타일 깊이 값을 결정하는 단계;
상기 에러 정정 회로를 통해, (i) 상기 세그먼트들의 하위 퀀타일 깊이 값의 최소값 및 (ii) 상기 세그먼트들의 상위 퀀타일 깊이 값의 최대값에 기초하여 글로벌 깊이 범위를 생성하는 단계;
상기 에러 정정 회로를 통해, 상기 깊이 맵에서 아웃라이어 깊이 값을 식별하는 단계; 및
상기 에러 정정 회로를 통해, 상기 깊이 맵에서의 정보에 기초하여 상기 아웃라이어 깊이 값을 정정하는 단계를 포함하는, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 11 항에 있어서,
상기 상위 퀀타일 깊이 값 및 상기 하위 퀀타일 깊이 값은 (i) 히스토그램 퀀타일 계산 및 (ii) 평균 및 분산 계산 중 적어도 하나에 기초하여 결정되고,
상기 계산들 각각은 각 세그먼트에서의 깊이 값들의 범위 및 깊이 값들의 상기 범위의 인접한 서브세트에 기초하며,
상기 인접한 서브세트는 상기 세그먼트에서의 깊이 값들의 밀도를 나타내는, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 12 항에 있어서,
상기 깊이 값들의 범위의 인접한 서브세트는 상기 하위 퀀타일 깊이 값 및 상기 상위 퀀타일 깊이 값을 포함하며,
상기 하위 퀀타일 깊이 값은 상기 인접한 서브세트 내에서 최저 깊이 값이고, 상기 상위 퀀타일 깊이 값은 상기 인접한 서브세트 내에서 최고 깊이 값인, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 11 항에 있어서,
상기 복수의 코드워드들을 투영하는 단계는 코드마스크를 통해 광을 전파시키는 단계를 포함하며,
상기 코드마스크는 복수의 심볼들을 갖는, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 11 항에 있어서,
상기 깊이 맵에서 아웃라이어 깊이 값을 식별하는 단계는 상기 글로벌 깊이 범위 밖에서 상기 깊이 맵에서 깊이 값을 검출하는 단계를 포함하는, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 11 항에 있어서,
상기 복수의 세그먼트들은 상기 깊이 맵의 중첩 영역들을 포함하는, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 11 항에 있어서,
상기 아웃라이어 깊이 값을 정정하는 단계는,
상기 아웃라이어 깊이 값에 이웃하는 복수의 깊이 값들을 결정하는 단계로서, 상기 복수의 깊이 값들은 상기 글로벌 깊이 범위 내에 있는, 상기 복수의 깊이 값들을 결정하는 단계;
상기 복수의 깊이 값들에 기초하여 제 1 깊이 값을 계산하는 단계; 및
상기 아웃라이어 깊이 값을 상기 제 1 깊이 값으로 대체하는 단계를 포함하는, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 17 항에 있어서,
상기 제 1 깊이 값은 상기 복수의 깊이 값들의 평균인, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 11 항에 있어서,
상기 아웃라이어 깊이 값을 정정하는 단계는,
상기 아웃라이어 깊이 값에 이웃하는 복수의 깊이 값들을 결정하는 단계로서, 상기 복수의 깊이 값들은 상기 글로벌 깊이 범위 내에 있는, 상기 복수의 깊이 값들을 결정하는 단계;
상기 이웃하는 깊이 값들의 수평 그래디언트 및 수직 그래디언트 중 적어도 하나를 계산하는 단계;
상기 수평 그래디언트 및 상기 수직 그래디언트 중 상기 적어도 하나에 기초하여 제 1 깊이 값을 계산하는 단계; 및
상기 아웃라이어 깊이 값을 상기 제 1 깊이 값으로 대체하는 단계를 포함하는, 깊이 맵에서 에러들을 정정하기 위한 방법. - 제 11 항에 있어서,
상기 복수의 세그먼트들에서의 각 세그먼트의 사이즈는 사용자 구성가능한, 깊이 맵에서 에러들을 정정하기 위한 방법. - 깊이 맵에서 에러들을 정정하기 위한 장치로서,
투영된 시야에서 복수의 코드워드들을 투영하는 수단;
상기 투영된 시야에서 표면으로부터 투영된 상기 코드워드들의 반사를 수신하는 수단;
상기 투영된 코드워드들의 수신된 상기 반사에 기초하여 상기 깊이 맵을 생성하는 수단;
상기 깊이 맵을 복수의 세그먼트들로 분할하는 수단;
상기 세그먼트들 각각에서의 하위 퀀타일 깊이 값 및 상위 퀀타일 깊이 값을 결정하는 수단;
(i) 상기 세그먼트들의 하위 퀀타일 깊이 값의 최소값 및 (ii) 상기 세그먼트들의 상위 퀀타일 깊이 값의 최대값에 기초하여 글로벌 깊이 범위를 생성하는 수단;
상기 깊이 맵에서 아웃라이어 깊이 값을 식별하는 수단; 및
상기 깊이 맵에서의 정보에 기초하여 상기 아웃라이어 깊이 값을 정정하는 수단을 포함하는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 21 항에 있어서,
상기 상위 퀀타일 깊이 값 및 상기 하위 퀀타일 깊이 값은 (i) 히스토그램 퀀타일 계산 및 (ii) 평균 및 분산 계산 중 적어도 하나에 기초하여 결정되고,
상기 계산들 각각은 각 세그먼트에서의 깊이 값들의 범위 및 깊이 값들의 상기 범위의 인접한 서브세트에 기초하며,
상기 인접한 서브세트는 상기 세그먼트에서의 깊이 값들의 밀도를 나타내는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 22 항에 있어서,
상기 깊이 값들의 범위의 인접한 서브세트는 상기 하위 퀀타일 깊이 값 및 상기 상위 퀀타일 깊이 값을 포함하며,
상기 하위 퀀타일 깊이 값은 상기 인접한 서브세트 내에서 최저 깊이 값이고, 상기 상위 퀀타일 깊이 값은 상기 인접한 서브세트 내에서 최고 깊이 값인, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 21 항에 있어서,
상기 복수의 코드워드들을 투영하는 수단은 코드마스크를 통해 광을 전파시키는 수단을 포함하며,
상기 코드마스크는 복수의 심볼들을 갖는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 21 항에 있어서,
상기 깊이 맵에서 아웃라이어 깊이 값을 식별하는 수단은 상기 글로벌 깊이 범위 밖에서 상기 깊이 맵에서 깊이 값을 검출하는 수단을 포함하는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 21 항에 있어서,
상기 아웃라이어 깊이 값을 정정하는 수단은,
상기 아웃라이어 깊이 값에 이웃하는 복수의 깊이 값들을 결정하는 수단으로서, 상기 복수의 깊이 값들은 상기 글로벌 깊이 범위 내에 있는, 상기 복수의 깊이 값들을 결정하는 수단;
상기 복수의 깊이 값들에 기초하여 제 1 깊이 값을 계산하는 수단; 및
상기 아웃라이어 깊이 값을 상기 제 1 깊이 값으로 대체하는 수단을 포함하는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 제 21 항에 있어서,
상기 아웃라이어 깊이 값을 정정하는 수단은,
상기 아웃라이어 깊이 값에 이웃하는 복수의 깊이 값들을 결정하는 수단으로서, 상기 복수의 깊이 값들은 상기 글로벌 깊이 범위 내에 있는, 상기 복수의 깊이 값들을 결정하는 수단;
상기 이웃하는 깊이 값들의 수평 그래디언트 및 수직 그래디언트 중 적어도 하나를 계산하는 수단;
상기 수평 그래디언트 및 상기 수직 그래디언트 중 상기 적어도 하나에 기초하여 제 1 깊이 값을 계산하는 수단; 및
상기 아웃라이어 깊이 값을 상기 제 1 깊이 값으로 대체하는 수단을 포함하는, 깊이 맵에서 에러들을 정정하기 위한 장치. - 명령들을 포함하는 비일시적 컴퓨터 판독가능 저장 매체로서,
상기 명령들은, 디바이스에 의해 시행될 때, 상기 디바이스로 하여금,
송신기를 통해, 투영된 시야에서 복수의 코드워드들을 투영하게 하고;
수신기에서, 상기 투영된 시야에서 표면으로부터 투영된 상기 코드워드들의 반사를 수신하게 하며;
에러 정정 시스템을 통해, 상기 투영된 코드워드들의 수신된 상기 반사에 기초하여 깊이 맵을 생성하게 하고;
상기 에러 정정 시스템을 통해, 상기 깊이 맵을 복수의 세그먼트들로 분할하게 하며;
상기 에러 정정 시스템을 통해, 상기 세그먼트들 각각에서의 하위 퀀타일 깊이 값 및 상위 퀀타일 깊이 값을 결정하게 하고;
상기 에러 정정 시스템을 통해, (i) 상기 세그먼트들의 하위 퀀타일 깊이 값의 최소값 및 (ii) 상기 세그먼트들의 상위 퀀타일 깊이 값의 최대값에 기초하여 글로벌 깊이 범위를 생성하게 하며;
상기 에러 정정 시스템을 통해, 상기 깊이 맵에서 아웃라이어 깊이 값을 식별하게 하고; 및
상기 에러 정정 시스템을 통해, 상기 깊이 맵에서의 정보에 기초하여 상기 아웃라이어 깊이 값을 정정하게 하는, 비일시적 컴퓨터 판독가능 저장 매체. - 제 28 항에 있어서,
상기 상위 퀀타일 깊이 값 및 상기 하위 퀀타일 깊이 값은 (i) 히스토그램 퀀타일 계산 및 (ii) 평균 및 분산 계산 중 적어도 하나에 기초하여 결정되고,
상기 계산들 각각은 각 세그먼트에서의 깊이 값들의 범위 및 깊이 값들의 상기 범위의 인접한 서브세트에 기초하며,
상기 인접한 서브세트는 상기 세그먼트에서의 깊이 값들의 밀도를 나타내는, 비일시적 컴퓨터 판독가능 저장 매체. - 제 29 항에 있어서,
상기 깊이 값들의 범위의 인접한 서브세트는 상기 하위 퀀타일 깊이 값 및 상기 상위 퀀타일 깊이 값을 포함하며,
상기 하위 퀀타일 깊이 값은 상기 인접한 서브세트 내에서 최저 깊이 값이고, 상기 상위 퀀타일 깊이 값은 상기 인접한 서브세트 내에서 최고 깊이 값인, 비일시적 컴퓨터 판독가능 저장 매체.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562387377P | 2015-12-22 | 2015-12-22 | |
| US62/387,377 | 2015-12-22 | ||
| US15/069,751 | 2016-03-14 | ||
| US15/069,751 US9996933B2 (en) | 2015-12-22 | 2016-03-14 | Methods and apparatus for outlier detection and correction of structured light depth maps |
| PCT/US2016/064119 WO2017112375A1 (en) | 2015-12-22 | 2016-11-30 | Methods and apparatus for outlier detection and correction of structured light depth maps |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180098260A true KR20180098260A (ko) | 2018-09-03 |
| KR101950658B1 KR101950658B1 (ko) | 2019-02-20 |
Family
ID=59066269
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187017584A Active KR101950658B1 (ko) | 2015-12-22 | 2016-11-30 | 구조형 광 깊이 맵들의 아웃라이어 검출 및 정정을 위한 방법들 및 장치들 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9996933B2 (ko) |
| EP (1) | EP3394827A1 (ko) |
| JP (1) | JP6513887B2 (ko) |
| KR (1) | KR101950658B1 (ko) |
| CN (1) | CN108369729B (ko) |
| BR (1) | BR112018012574A2 (ko) |
| WO (1) | WO2017112375A1 (ko) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9069725B2 (en) | 2011-08-19 | 2015-06-30 | Hartford Steam Boiler Inspection & Insurance Company | Dynamic outlier bias reduction system and method |
| US10557840B2 (en) | 2011-08-19 | 2020-02-11 | Hartford Steam Boiler Inspection And Insurance Company | System and method for performing industrial processes across facilities |
| WO2015157745A2 (en) | 2014-04-11 | 2015-10-15 | Hartford Steam Boiler Inspection And Insurance Company | Improving future reliability prediction based on system operational and performance data modelling |
| US10445861B2 (en) * | 2017-02-14 | 2019-10-15 | Qualcomm Incorporated | Refinement of structured light depth maps using RGB color data |
| US10552970B2 (en) | 2018-01-12 | 2020-02-04 | Qualcomm Incorporated | Efficient guide filter for depth refinement |
| CN109118533B (zh) * | 2018-08-30 | 2021-03-02 | 歌尔光学科技有限公司 | 深度信息处理方法、装置和设备 |
| US11636292B2 (en) | 2018-09-28 | 2023-04-25 | Hartford Steam Boiler Inspection And Insurance Company | Dynamic outlier bias reduction system and method |
| CN109756662B (zh) * | 2018-11-14 | 2023-06-13 | 深圳大学 | 基于dll延迟锁相环的深度信息校正方法以及深度信息校正装置 |
| EP3746989A4 (en) | 2018-11-16 | 2021-03-17 | Beijing Didi Infinity Technology and Development Co., Ltd. | SYSTEMS AND METHODS FOR POSITIONING VEHICLES IN POOR LIGHT CONDITIONS |
| US10510155B1 (en) | 2019-06-11 | 2019-12-17 | Mujin, Inc. | Method and processing system for updating a first image generated by a first camera based on a second image generated by a second camera |
| US11416998B2 (en) | 2019-07-30 | 2022-08-16 | Microsoft Technology Licensing, Llc | Pixel classification to reduce depth-estimation error |
| CN114556382B (zh) | 2019-09-18 | 2026-04-07 | 哈佛蒸汽锅炉检验和保险公司 | 用于物理系统参数的偏倚减少的预测系统及实现方法 |
| US11615348B2 (en) | 2019-09-18 | 2023-03-28 | Hartford Steam Boiler Inspection And Insurance Company | Computer-based systems, computing components and computing objects configured to implement dynamic outlier bias reduction in machine learning models |
| GB2639108A (en) | 2019-09-18 | 2025-09-10 | The Hartford Steam Boiler Inspection And Insurance Company | Computer-based systems, computing components and computing objects configured to implement dynamic outlier bias reduction in machine learning models |
| CN113591872B (zh) | 2020-04-30 | 2025-01-14 | 华为技术有限公司 | 一种数据处理系统、物体检测方法及其装置 |
| US11999316B2 (en) * | 2022-01-19 | 2024-06-04 | Nio Technology (Anhui) Co., Ltd. | Systems and methods of vehicle surveillance |
| CN115115535B (zh) * | 2022-04-07 | 2025-08-22 | 腾讯科技(深圳)有限公司 | 深度图的去噪方法、装置、介质及设备 |
| CN115861129B (zh) * | 2022-12-30 | 2026-04-03 | 广东奥普特科技股份有限公司 | 一种深度图姿态校正方法、系统、计算机设备及存储介质 |
| EP4704419A1 (en) * | 2024-08-30 | 2026-03-04 | Beijing Xiaomi Mobile Software Co., Ltd. | Method and apparatus for processing an image |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130136338A1 (en) * | 2011-11-30 | 2013-05-30 | Adobe Systems Incorporated | Methods and Apparatus for Correcting Disparity Maps using Statistical Analysis on Local Neighborhoods |
| US20130314696A1 (en) * | 2012-05-24 | 2013-11-28 | Qualcomm Incorporated | Transmission of Affine-Invariant Spatial Mask for Active Depth Sensing |
| EP2860695A1 (en) * | 2013-10-14 | 2015-04-15 | Ricoh Company, Ltd. | Method and apparatus for identifying noise in disparity depth image |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2184713A1 (en) * | 2008-11-04 | 2010-05-12 | Koninklijke Philips Electronics N.V. | Method and device for generating a depth map |
| EP2293586A1 (en) * | 2009-08-04 | 2011-03-09 | Samsung Electronics Co., Ltd. | Method and system to transform stereo content |
| US8970672B2 (en) * | 2010-05-28 | 2015-03-03 | Qualcomm Incorporated | Three-dimensional image processing |
| US8933927B2 (en) * | 2010-09-02 | 2015-01-13 | Samsung Electronics Co., Ltd. | Display system with image conversion mechanism and method of operation thereof |
| US8711206B2 (en) | 2011-01-31 | 2014-04-29 | Microsoft Corporation | Mobile camera localization using depth maps |
| US20140340486A1 (en) * | 2011-09-16 | 2014-11-20 | Konica Minolta, Inc. | Image processing system, image processing method, and image processing program |
| US10368053B2 (en) * | 2012-11-14 | 2019-07-30 | Qualcomm Incorporated | Structured light active depth sensing systems combining multiple images to compensate for differences in reflectivity and/or absorption |
| US10230934B2 (en) | 2013-06-14 | 2019-03-12 | Microsoft Tehcnology Licensing, Llc | Depth map correction using lookup tables |
| WO2014209268A1 (en) | 2013-06-24 | 2014-12-31 | Intel Corporation | Error detecting and correcting structured light patterns |
| CN103400366B (zh) | 2013-07-03 | 2016-04-13 | 西安电子科技大学 | 基于条纹结构光的动态场景深度获取方法 |
| CN104424649B (zh) * | 2013-08-21 | 2017-09-26 | 株式会社理光 | 检测运动物体的方法和系统 |
| KR102130123B1 (ko) * | 2013-10-31 | 2020-07-03 | 삼성전자주식회사 | 다시점 영상 디스플레이 장치 및 그 제어 방법 |
| AU2015283079A1 (en) * | 2014-06-30 | 2016-11-24 | Ventana Medical Systems, Inc. | Detecting edges of a nucleus using image analysis |
| AU2014280872A1 (en) * | 2014-12-22 | 2016-07-07 | Canon Kabushiki Kaisha | Multiscale depth estimation using depth from defocus |
| KR101690645B1 (ko) * | 2015-09-21 | 2016-12-29 | 경북대학교 산학협력단 | 다단계 시차영상 분할이 적용된 시차탐색범위 추정 방법 및 이를 이용한 스테레오 영상 정합장치 |
| US10554956B2 (en) * | 2015-10-29 | 2020-02-04 | Dell Products, Lp | Depth masks for image segmentation for depth-based computational photography |
| US10659766B2 (en) * | 2015-10-30 | 2020-05-19 | Canon Kabushiki Kaisha | Confidence generation apparatus, confidence generation method, and imaging apparatus |
-
2016
- 2016-03-14 US US15/069,751 patent/US9996933B2/en active Active
- 2016-11-30 JP JP2018532358A patent/JP6513887B2/ja not_active Expired - Fee Related
- 2016-11-30 BR BR112018012574A patent/BR112018012574A2/pt not_active Application Discontinuation
- 2016-11-30 EP EP16819747.3A patent/EP3394827A1/en not_active Withdrawn
- 2016-11-30 CN CN201680072006.7A patent/CN108369729B/zh active Active
- 2016-11-30 WO PCT/US2016/064119 patent/WO2017112375A1/en not_active Ceased
- 2016-11-30 KR KR1020187017584A patent/KR101950658B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130136338A1 (en) * | 2011-11-30 | 2013-05-30 | Adobe Systems Incorporated | Methods and Apparatus for Correcting Disparity Maps using Statistical Analysis on Local Neighborhoods |
| US20130314696A1 (en) * | 2012-05-24 | 2013-11-28 | Qualcomm Incorporated | Transmission of Affine-Invariant Spatial Mask for Active Depth Sensing |
| EP2860695A1 (en) * | 2013-10-14 | 2015-04-15 | Ricoh Company, Ltd. | Method and apparatus for identifying noise in disparity depth image |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170178332A1 (en) | 2017-06-22 |
| JP6513887B2 (ja) | 2019-05-15 |
| US9996933B2 (en) | 2018-06-12 |
| CN108369729A (zh) | 2018-08-03 |
| CN108369729B (zh) | 2019-11-12 |
| KR101950658B1 (ko) | 2019-02-20 |
| EP3394827A1 (en) | 2018-10-31 |
| BR112018012574A2 (pt) | 2018-12-04 |
| WO2017112375A1 (en) | 2017-06-29 |
| JP2019501390A (ja) | 2019-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101950658B1 (ko) | 구조형 광 깊이 맵들의 아웃라이어 검출 및 정정을 위한 방법들 및 장치들 | |
| US10909707B2 (en) | System and methods for measuring depth using an array of independently controllable cameras | |
| US9948920B2 (en) | Systems and methods for error correction in structured light | |
| US9530215B2 (en) | Systems and methods for enhanced depth map retrieval for moving objects using active sensing technology | |
| CN107851310B (zh) | 节省存储器的经译码光错误校正 | |
| US10223801B2 (en) | Code domain power control for structured light | |
| EP3485460B1 (en) | Object reconstruction in disparity maps using displaced shadow outlines | |
| US10771768B2 (en) | Systems and methods for improved depth sensing | |
| CN103069250A (zh) | 三维测量设备、三维测量方法和计算机程序 | |
| CN107408306B (zh) | 一种产生对象的深度图信息的方法、设备及可读介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20180620 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20181019 Comment text: Request for Examination of Application |
|
| PA0302 | Request for accelerated examination |
Patent event date: 20181019 Patent event code: PA03022R01D Comment text: Request for Accelerated Examination |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20181120 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20190214 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20190214 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20211229 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20221221 Start annual number: 5 End annual number: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240102 Start annual number: 6 End annual number: 6 |
|
| PR1001 | Payment of annual fee |
Payment date: 20241223 Start annual number: 7 End annual number: 7 |