KR20180017228A - Pm 모터의 직접 전력 제어에 의한 일정한 공기 볼륨 제어를 위한 방법 및 상기 방법을 적용하는 hvac 시스템 - Google Patents
Pm 모터의 직접 전력 제어에 의한 일정한 공기 볼륨 제어를 위한 방법 및 상기 방법을 적용하는 hvac 시스템 Download PDFInfo
- Publication number
- KR20180017228A KR20180017228A KR1020187003539A KR20187003539A KR20180017228A KR 20180017228 A KR20180017228 A KR 20180017228A KR 1020187003539 A KR1020187003539 A KR 1020187003539A KR 20187003539 A KR20187003539 A KR 20187003539A KR 20180017228 A KR20180017228 A KR 20180017228A
- Authority
- KR
- South Korea
- Prior art keywords
- motor
- air flow
- operating point
- constant
- hvac system
- Prior art date
Links
Images












Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/004—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids by varying driving speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F11/00—Control or safety arrangements
- F24F11/70—Control systems characterised by their outputs; Constructional details thereof
- F24F11/72—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure
- F24F11/74—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure for controlling air flow rate or air velocity
- F24F11/75—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure for controlling air flow rate or air velocity for maintaining constant air flow rate or air velocity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D19/00—Axial-flow pumps
- F04D19/002—Axial flow fans
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D25/00—Pumping installations or systems
- F04D25/02—Units comprising pumps and their driving means
- F04D25/06—Units comprising pumps and their driving means the pump being electrically driven
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/26—Rotors specially for elastic fluids
- F04D29/32—Rotors specially for elastic fluids for axial flow pumps
- F04D29/325—Rotors specially for elastic fluids for axial flow pumps for axial flow fans
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F11/00—Control or safety arrangements
- F24F11/70—Control systems characterised by their outputs; Constructional details thereof
- F24F11/72—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure
- F24F11/74—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure for controlling air flow rate or air velocity
- F24F11/77—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure for controlling air flow rate or air velocity by controlling the speed of ventilators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/06—Arrangements for speed regulation of a single motor wherein the motor speed is measured and compared with a given physical value so as to adjust the motor speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/28—Arrangements for controlling current
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2270/00—Control
- F05D2270/30—Control parameters, e.g. input parameters
- F05D2270/304—Spool rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2270/00—Control
- F05D2270/30—Control parameters, e.g. input parameters
- F05D2270/335—Output power or torque
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2205/00—Indexing scheme relating to controlling arrangements characterised by the control loops
- H02P2205/03—Power loop, i.e. comparison of the motor power with a power reference
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/05—Synchronous machines, e.g. with permanent magnets or DC excitation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B30/00—Energy efficient heating, ventilation or air conditioning [HVAC]
- Y02B30/70—Efficient control or regulation technologies, e.g. for control of refrigerant flow, motor or heating
-
- Y02B30/746—
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Ac Motors In General (AREA)
- Ventilation (AREA)
- Air Conditioning Control Device (AREA)
- Inverter Devices (AREA)
Abstract
본 발명은 직접 전력-제언된 PM 모터에 의해 제어되는 일정한 공기 흐름을 위한 제어 방법에 관한 것이고, PM 모터는 팬 휠의 회전을 구동하기 위하여 HVAC 시스템에 설치되고, 그리고 PM 모터는 고정자 컴포넌트, 영구 자석 회전자 컴포넌트들, 및 모터 제어기를 가진다. 몇몇 실시예들에서, 모터 제어기는 동작 파라미터들 감지 회로 및 마이크로프로세서를 포함한다.
Description
본 발명은 가변 속도 모터를 위한 일정한 공기 흐름 제어 방법에 관한 것이고, 특히 PM 모터 직접 전력 제어의 일정한 공기 흐름 제어 방법 및 동일한 방법을 사용하는 HVAC 시스템 및 다른 가변 속도 모터 시스템들에 관한 것이다.
DC 무브러쉬(brushless) 영구 자석 동기 모터들의 단축형인 PM 모터들은 또한 ECM 모터들로서 지칭될 수 있다. 상이한 서비스 환경들로 인해, PM 모터는 일반적으로 일정한 회전 속도 제어, 일정한 토크 제어, 일정한 공기 흐름 제어 등을 포함하는 상이한 제어 모드들을 가진다. 일정한 공기 흐름 제어는 HVAC(heating ventilation system)들에서 공통 모드이다.
가정용 공기 컨디셔너(conditioner)의 실내 통풍 파이프에서, 정압(static pressure)은 종종 시간이 진행함에 따라 변화하는데, 예컨대 파이프 또는 필터 내 먼지 증착으로 인해 방해된다. 파이프의 상이한 설비들로 인해, 정압은 종종 제조자의 실험실의 공칭 시스템의 표준 정압보다 높다. 일정한 공기 흐름 제어는 이들 조건들에서 사용자들에게 일정한 공기 흐름을 제공할 수 있고, 이에 의해 다양한 정압 하에서 통풍, 냉각 또는 가열의 편안한 효과가 유지되고, 시스템 동작이 효율적이고 에너지가 절약되게 한다.
일반적인 일정한 공기 흐름 제어 방법은 공기 흐름 미터(meter)를 직접 장착하는 것이다. 이것은 비용을 증가시킬 뿐 아니라, 공기 흐름 실패로 인한 잠재적 제어 실패를 초래한다. 현재 공기 컨디셔너 제조자들은 일반적으로 공기 흐름 미터들 없이 일정한 공기 흐름 제어 방법을 사용한다. 때때로, 속도를 조절하기 위하여 정압의 변화를 모니터하는 것이 요구된다. 몇몇 컴퓨테이션(computation) 공식들은 대수 계산 또는 고차 다항식들을 수반하고, 따라서 모터 제어기의 MCU는 강력한 컴퓨팅(computing) 능력을 가지는 것이 요구되고, 따라서 비용이 추가로 증가된다.
미국 특허 번호 US4806833은, 모터의 회전 속도가 일정한 공기 흐름을 획득하기 위하여 외부 정압에 관하여 변경되는 것을 개시한다. 외부 정압의 변경은 모터의 빌드-인(build-in) 회전 속도 미터에 의해 감지되는 회전 속도의 변화에 따라 계산된다. 공기 흐름 계산은 토크와 회전 속도의 함수에 의해 제어된다. 미국 특허 번호 US5736823a는 또한 일정한 공기 흐름 제어 방법을 개시하였고, 상기 공기 흐름 제어 방법은 또한 토크와 회전 속도의 함수에 의해 제어된다.
상기 일정한 공기 흐름 제어 방법들은 핵심 제어 변수로서 토크를 사용하고 다음 기술적 문제들을 가진다:
1) 토크는 기계적 변수이고, 이는 결정 및 계산되는 것이 어렵고 따라서 제어 정확성에 영향을 줄 것임;
2) 토크 제어는 주로 동적 제어의 애플리케이션들에 사용되지만, 일정한 공기 흐름 제어는 통상적으로 정상 상태 제어이고, 따라서 토크 제어는 매우 적용 가능하지 않음;
3) 토크 제어는 모터 제어에서 비교적 복잡해지고, 가장 우수한 예는 더 나은 토크 제어를 실현하기 위한 벡터 제어이지만; 시스템 토크 제어의 정확성은 시스템 하드웨어와 소프트웨어의 비용에 의해 제약됨; 및
4) 토크는 컨슈머(consumer)들 및 정부(government)가 시스템의 동작을 관리 및 이해하게 하는 특성 파라미터가 아님.
다른 말로: 토크는 직접 결정되기 어려운 기계적 변수이고 일정한 공기 흐름 제어를 실현하기 위한 변수 제어로서 토크를 활용하는 것은 복잡한 동작 및 높은 비용을 초래하고; 게다가, 토크는 정부에 의해 옹호되는 에너지-절약 및 환경 관리 및 표준들과 간신히 연관되고 직관적이지 않다.
본 발명의 목적은 PM 모터 직접 전력 제어된 일정한 공기 흐름 제어 방법 및 상기 방법을 사용하는 HVAC 시스템 및 다른 가변 속도 모터 시스템들을 제공하는 것이다. 본 발명은 특히 정상 상태에서 공기 흐름 제어에 적당하고, 간단한 알고리즘, CPU 동작을 위한 낮은 요건들, 작은 비용 및 높은 제어 정확성을 가지며, 그리고 에너지 보존 및 방출 감소의 제어에 유리하다.
본 발명의 목적은 다음 기술적 해결책들에 의해 달성된다.
PM 모터 직접 전력 제어의 일정한 공기 흐름 제어 방법이 제공되고, PM 모터는 회전하도록 윈드 휠(wind wheel)을 구동하기 위하여 HVAC 시스템에 장착되고 고정자 어셈블리, 영구 자석 어셈블리 및 모터 제어기를 가지며, 모터 제어기는 모터 동작 파라미터 검출 회로 및 마이크로프로세서를 포함하고, 상기 방법은 다음 단계들:
단계 A) 타겟 공기 흐름(IN-CFM)을 수신하거나 미리 설정하기 위하여 모터 제어기를 시작하는 단계;
단계 B) 타겟 공기 흐름(IN-CFM)에 따라 대응하는 함수(P=f(n))를 획득하는 단계 ― n은 회전 속도를 나타내고, P는 모터의 입력 전력을 나타냄 ―;
단계 C) 직접 전력 제어된 일정한 공기 흐름 제어 모드에 진입하는 단계: 상기 진입하는 단계는, 모터가 함수(P=f(n))의 제어 트랙(track)을 따라 안정된 작동 포인트(pt, nt)에 도달하게 하도록, 모터의 속도가 영(zero)일 때 모터를 제어하거나 모터를 시작하는 단계를 포함하고, 여기서  는 일정한 공기 흐름을 충족하는 제어 함수(P=f(n))의 트랙 상에서 한 쌍의 입력 전력 및 회전 속도임;
는 일정한 공기 흐름을 충족하는 제어 함수(P=f(n))의 트랙 상에서 한 쌍의 입력 전력 및 회전 속도임;
단계 D) 직접 전력 제어된 일정한 공기 흐름 제어 모드를 유지하는 단계: 상기 유지하는 단계는 모터의 동작 파라미터들에 따라 모터의 실시간 입력 전력(Pi)을 계산하는 단계, 및 전력 증분 값( )을 계산하는 단계를 포함함;
)을 계산하는 단계를 포함함;
단계 E) 전력 증분 값( )이 설정 값(
)이 설정 값( )보다 작으면, 현재 작동 포인트를 유지하는 단계;
)보다 작으면, 현재 작동 포인트를 유지하는 단계;
단계 F) 전력/회전 속도 제어 로직에 의해, 전력 증분 값( )이 설정 값()보다 크거나 같으면, 속도 루프의 동작 시간에 도달되었는지를 계산하는 단계, 및 속도 루프의 동작 시간에 아직 도달되지 않으면 현재 작동 포인트를 유지하는 단계; 및
)이 설정 값()보다 크거나 같으면, 속도 루프의 동작 시간에 도달되었는지를 계산하는 단계, 및 속도 루프의 동작 시간에 아직 도달되지 않으면 현재 작동 포인트를 유지하는 단계; 및
단계 G) 트랙 상에서 새로운 작동 포인트(Pi, ni))를 실현하기 위하여, 속도 루프의 동작 시간에 이미 도달되었다면  에 따라 속도를 조절하기 위하여 속도 제어 회로에 진입하는 단계, 즉 pt=Pi 및 nt=ni를 허용하는 단계, 및 단계 C로 되돌아가는 단계를 포함하는 것을 특징으로 하고, 여기서 ni는 실시간 회전 속도를 나타낸다.
에 따라 속도를 조절하기 위하여 속도 제어 회로에 진입하는 단계, 즉 pt=Pi 및 nt=ni를 허용하는 단계, 및 단계 C로 되돌아가는 단계를 포함하는 것을 특징으로 하고, 여기서 ni는 실시간 회전 속도를 나타낸다.
모터 동작 파라미터 검출 회로는 버스 전류 검출 회로 및 버스 전압 검출 회로를 포함하고, 버스 전류 검출 회로 및 버스 전압 검출 회로는 실시간 버스 전류( ) 및 실시간 버스 전압(
) 및 실시간 버스 전압( )을 검출하고, 모터의 실시간 입력 전력은
)을 검출하고, 모터의 실시간 입력 전력은  이다.
이다.
모터 동작 파라미터 검출 회로는 위상 선전류 검출 회로 및 버스 전압 검출 회로를 포함하고, 위상 선전류 검출 회로 및 버스 전압 검출 회로는 마이크로프로세서 쪽으로의 입력에 대한 위상 전류 및 버스 전압 데이터를 검출하고, 실시간 위상 전류 및 실시간 버스 전압( )은
)은  좌표들에서 전류들(
좌표들에서 전류들( 및
및  ) 및 전압들(
) 및 전압들( 및
및  )로 변환되고, 모터의 실시간 입력 전력은
)로 변환되고, 모터의 실시간 입력 전력은  (
( )이다.
)이다.
함수(P=f(n))는: 처음에는 본래의 데이터를 수집하고, 자주 몇몇 타겟 공기 흐름들에 관하여 낮은 정압으로부터 높은 정압으로 조절하고 ― 여기서 정압은 실제로 적용된 정압 범위를 커버할 수 있음 ―; 정압을 조절하는 프로세스에서 모터가 회전 속도 제어된 상태에 있게 하고, 모터의 회전 속도(n) 및 실시간 입력 전력(Pi)을 조절함으로써 공기 흐름이 타겟 공기 흐름이게 유지하고, 그리고 이 순간에 모터의 안정된 회전 속도(n) 및 대응하는 실시간 입력 전력(Pi)을 레코딩하고, 이에 따라 모터의 회전 속도(n) 및 실시간 입력 전력(Pi)의 그룹이 몇몇 타겟 공기 흐름들 각각에 관하여 생성되고; 그리고 그 다음, 곡선 피팅(fitting) 방법에 의해 몇몇 타겟 공기 흐름들의 각각에 대응하는 함수(P=f(n))를 생성하는 방식으로 획득된다.
외부 입력 타겟 공기 흐름 값(IN-CFM)이 결정된 몇몇 타겟 공기 흐름들 중 하나와 동일하지 않으면, 임의의 외부 입력 타겟 공기 흐름 값(IN-CFM)에 대응하는 함수(P=f(n))는, 전체 과정 중에 임의의 타겟 공기 흐름의 일정한 공기 흐름 제어를 실현하기 위하여, 보간 방법에 의해 피팅 및 계산될 수 있다.
모터의 실시간 입력 전력(Pi)은 로우-패스(low-pass) 디지털 필터에 의해 프로세스되고, 실시간 버스 전류( ) 및 실시간 버스 전압(
) 및 실시간 버스 전압( )의 데이터는 수집되는 동안 로우-패스 디지털 필터에 의해 프로세스된다.
)의 데이터는 수집되는 동안 로우-패스 디지털 필터에 의해 프로세스된다.
함수 관계(P=f(n))는 다항식 함수( )이고, 여기서
)이고, 여기서  는 모든 계수들이고, n은 모터의 회전 속도 값을 나타내고, 타겟 공기 흐름들의 각각은 계수들(
는 모든 계수들이고, n은 모터의 회전 속도 값을 나타내고, 타겟 공기 흐름들의 각각은 계수들( )의 그룹에 대응하고, 그리고 계수들은 저장되고; 그리고 마이크로프로세서는 함수 관계(P=f(n))를 획득하기 위하여 입력 타겟 공기 흐름 값(IN-CFM)에 따라 테이블 룩업 방법 또는 보간 방법에 의해 계수들(
)의 그룹에 대응하고, 그리고 계수들은 저장되고; 그리고 마이크로프로세서는 함수 관계(P=f(n))를 획득하기 위하여 입력 타겟 공기 흐름 값(IN-CFM)에 따라 테이블 룩업 방법 또는 보간 방법에 의해 계수들( )의 대응하는 그룹을 획득한다.
)의 대응하는 그룹을 획득한다.
함수 관계(P=f(n))는 2차 함수( )이다.
)이다.
제 1 항 내지 제 8 항 중 어느 한 항에 따른 PM 모터 직접 전력 제어의 일정한 공기 흐름 제어 방법을 사용하는 HVAC 시스템이 제공되고, PM 모터 및 윈드 휠을 포함하고, PM 모터는 회전하도록 윈드 휠을 구동하고 고정자 어셈블리, 영구 자석 회전자 어셈블리 및 모터 제어기를 가지며, PM 모터는 직접 전력 제어에 의해 일정한 공기 흐름 제어를 실현한다.
제 1 항 내지 제 8 항 중 어느 한 항에 따른 PM 모터 직접 전력 제어의 일정한 공기 흐름 제어 방법을 사용하는 가변 속도 모터 시스템이 제공되고, 가변 속도 모터 및 윈드 휠을 포함하고, 가변 속도 모터는 회전하도록 윈드 휠을 구동하고 고정자 어셈블리, 회전자 어셈블리 및 모터 제어기를 가지며, 가변 속도 모터는 직접 전력 제어에 의해 일정한 공기 흐름 제어를 실현한다.
종래 기술과 비교될 때, 본 발명은 다음 효과들을 가진다: 1) 실험들에 의해 몇몇 입력 타겟 공기 흐름 값들(CFMset)에 대응하는 함수(P=f(n))를 획득하고, 모터의 회전 속도(n)에 따른 함수(P=f(n))를 통해 대응하는 모터 입력 전력의 계산된 값(Pt)을 계산하고, 실시간 버스 전류( ) 또는 위상 전류 및 실시간 버스 전압(
) 또는 위상 전류 및 실시간 버스 전압( )을 검출하고, 벡터
)을 검출하고, 벡터  좌표들 상에서 전류들(
좌표들 상에서 전류들( 및
및  ) 및 전압들(
) 및 전압들( 및
및  )을 계산하고, 모터의 실시간 입력 전력(Pi)을 계산하고, 그리고 폐루프 제어를 수행하기 위하여, 모터 입력 전력의 계산된 값(Pt)을 모터의 실시간 입력 전력(Pi)과 비교함으로써, 정상 상태에서 일정한 공기 흐름 제어에 특히 적당하고 높은 정확성 및 낮은 비용을 가지며; 2) 본 발명의 일정한 공기 흐름은 모터의 입력 전력을 직접 제어하는 것이고, 모터 입력 전력은 전기 변수이고 쉽고 정확하게 결정될 수 있고; 모터 입력 전력은 더 높은 정확성을 가진 DC 버스 전압, DC 버스 전류 또는 위상 전류로부터 획득될 수 있고; 직접 전력 제어는 시스템의 정상 상태 제어에 적당하고; 그리고 공기 흐름 제어 자체는 통상적인 정상 상태 제어 문제이고, 그리고 이에 따라서 시스템은 직접 전력 제어를 공기 흐름 제어와 매칭함으로써 더 정확하고 안정되고; 직접 전력 제어는 모터 속도 제어에 의해 실현되고, 그리고 이에 따라서 높은 정확성 및 낮은 비용을 가지며; 그리고 3) 모터의 실시간 입력 전력(Pi)은 로우-패스 디지털 필터에 의해 프로세스되고, 그리고 이에 따라서 계산 정확성은 더 높고 비용은 더 낮다.
)을 계산하고, 모터의 실시간 입력 전력(Pi)을 계산하고, 그리고 폐루프 제어를 수행하기 위하여, 모터 입력 전력의 계산된 값(Pt)을 모터의 실시간 입력 전력(Pi)과 비교함으로써, 정상 상태에서 일정한 공기 흐름 제어에 특히 적당하고 높은 정확성 및 낮은 비용을 가지며; 2) 본 발명의 일정한 공기 흐름은 모터의 입력 전력을 직접 제어하는 것이고, 모터 입력 전력은 전기 변수이고 쉽고 정확하게 결정될 수 있고; 모터 입력 전력은 더 높은 정확성을 가진 DC 버스 전압, DC 버스 전류 또는 위상 전류로부터 획득될 수 있고; 직접 전력 제어는 시스템의 정상 상태 제어에 적당하고; 그리고 공기 흐름 제어 자체는 통상적인 정상 상태 제어 문제이고, 그리고 이에 따라서 시스템은 직접 전력 제어를 공기 흐름 제어와 매칭함으로써 더 정확하고 안정되고; 직접 전력 제어는 모터 속도 제어에 의해 실현되고, 그리고 이에 따라서 높은 정확성 및 낮은 비용을 가지며; 그리고 3) 모터의 실시간 입력 전력(Pi)은 로우-패스 디지털 필터에 의해 프로세스되고, 그리고 이에 따라서 계산 정확성은 더 높고 비용은 더 낮다.
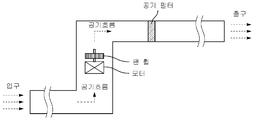
도 1은 종래의 공기-컨디셔닝 팬 시스템의 구조적 개략도이다.
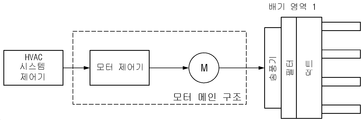
도 2는 본 발명에 따른 PM 모터의 설비 계략도이다.
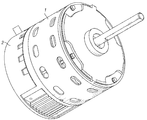
도 3은 본 발명에 따른 PM 모터의 3D 다이어그램이다.
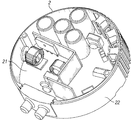
도 4는 본 발명에 따른 PM 모터의 모터 제어기의 3D 다이어그램이다.
도 5는 본 발명에 따른 PM 모터의 단면도이다.
도 6은 본 발명의 실시예 1에 따른 PM 모터의 모터 제어기의 구현 회로의 블록도이다.
도 7은 도 6의 대응하는 회로도이다.
도 8은 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 흐름도이다.
도 9는 본 발명에 따른 실험들에 의해 결정된 일정한 공기 흐름 피팅 곡선들의 그룹이다.
도 10은 본 발명에 따른 1/3HP PM 모터의 직접 전력 제어된 일정한 공기 흐름의 실험 데이터의 피팅 곡선이다.
도 11은 본 발명에 따른 보간 방법에 의해 해결되는 임의의 입력 공기 흐름 실험 데이터의 피팅 곡선이다.
도 12는 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 제어 로직도이다.
도 13은 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 제어 프로세스의 개략도이다.
도 14는 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 다른 제어 프로세스의 개략도이다.
도 15는 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 실험적으로 검증된 테스트 결과들을 도시하는 다이어그램이다.
도 16은 본 발명의 실시예 2에 따른 PM 모터의 모터 제어기의 구현 회로의 블록도이다.
도 17은 도 12의 대응하는 회로도이다.
도 18은 종래에 통상적인 PM 모터 벡터 제어의 개략도이다.
도 19는 종래에 통상적인 PM 모터 벡터 제어의 개별 좌표 시스템의 관계 그래프이다.
도 20은 본 발명의 실시예 2에 따른 일정한 공기 흐름 제어 방법의 제어 로직도이다.
도 2는 본 발명에 따른 PM 모터의 설비 계략도이다.
도 3은 본 발명에 따른 PM 모터의 3D 다이어그램이다.
도 4는 본 발명에 따른 PM 모터의 모터 제어기의 3D 다이어그램이다.
도 5는 본 발명에 따른 PM 모터의 단면도이다.
도 6은 본 발명의 실시예 1에 따른 PM 모터의 모터 제어기의 구현 회로의 블록도이다.
도 7은 도 6의 대응하는 회로도이다.
도 8은 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 흐름도이다.
도 9는 본 발명에 따른 실험들에 의해 결정된 일정한 공기 흐름 피팅 곡선들의 그룹이다.
도 10은 본 발명에 따른 1/3HP PM 모터의 직접 전력 제어된 일정한 공기 흐름의 실험 데이터의 피팅 곡선이다.
도 11은 본 발명에 따른 보간 방법에 의해 해결되는 임의의 입력 공기 흐름 실험 데이터의 피팅 곡선이다.
도 12는 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 제어 로직도이다.
도 13은 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 제어 프로세스의 개략도이다.
도 14는 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 다른 제어 프로세스의 개략도이다.
도 15는 본 발명의 실시예 1에 따른 일정한 공기 흐름 제어 방법의 실험적으로 검증된 테스트 결과들을 도시하는 다이어그램이다.
도 16은 본 발명의 실시예 2에 따른 PM 모터의 모터 제어기의 구현 회로의 블록도이다.
도 17은 도 12의 대응하는 회로도이다.
도 18은 종래에 통상적인 PM 모터 벡터 제어의 개략도이다.
도 19는 종래에 통상적인 PM 모터 벡터 제어의 개별 좌표 시스템의 관계 그래프이다.
도 20은 본 발명의 실시예 2에 따른 일정한 공기 흐름 제어 방법의 제어 로직도이다.
본 발명은 특정 실시예들 및 첨부 도면들을 참조하여 하기에 상세히 설명될 것이다.
본 발명에서, 도 1에 도시된 바와 같이, 송풍기 시스템(가스로(gas furnace) 또는 공기 핸들러(handler) 같은)은 통상적인 공기-컨디셔닝 통풍 파이프에 장착된다. 송풍기 시스템은 도면에서 "모터+윈드 휠"로 대체된다. 파이프는 또한 공기 필터와 함께 그 안에 제공된다. 모터가 시작될 때, 송풍기 시스템은 공기를 송풍하기 시작한다. 다수의 공기 출구들 및 다수의 공기 입구들이 다수의 방들에 관련됨에 따라, 파이프에 설계에 대한 일반적 표준은 없다. 한편, 필터는 또한 상이한 압력 강하들을 가질 수 있고, 따라서 상이한 파이프들 내의 종래의 단상 AC 모터(PSC 모터)로 운반되는 송풍기 시스템의 실제 공기 흐름은 상이할 것이다. 도 2에 도시된 바와 같이, 1) 프러덕트(product)의 제어부는 HVAC 제어기이고, 상기 HVAC 제어기는 모든 프러덕트 동작 디바이스들 및 맞춤화된 인터페이스 및 프로토콜의 주변 회로에 의해 PM 모터 제어기에 전송할 셋 업 정보를 제어한다. 2) 모터 제어기는 모터 제어를 위해 마이크로프로세서(단일 칩 또는 DSP 전자 플레이트)를 포함한다. 모터 제어기는 전력을 제어기의 각각의 회로에 제공하기 위한 전원 부분을 가진다. 전원은 DC 버스 전압 및 전류를 가진다. 그러므로, 모터의 제어는 전력 송신을 수행할 것이다. 낮은-비용 및 대량 생산 모터 제어기들은 보통 모터 제어, 예컨대 벡터 제어, 직접 토크 제어, 및 다른 타입들의 센서 제어 또는 비-센서 제어를 실행하기 위하여 제어 모터 구동기들에 대한 시스템 피드백으로서 그리고 전류와 전압 감지 하드웨어로서 병렬 저항 회로들을 사용한다. 임의의 전자 컴포넌트의 동작 기간의 변화가 검출 정확성 및 지속성에 영향을 미치는 이유라는 것이 잘 알려져 있다. 3) PM 모터의 회전자는 자석들 및 구조들과 함께 상기 모터 위에 제공되고 고정자 측 또는 슬롯에 다상 권선이 있다. 온도가 가변할 때, 영구 자석 및 권선 저항들은 변할 것이고 따라서 이에 의해 모터 제어의 다른 변화들을 초래하는 것이 가능하다. 보통, 모터들을 제조하는 동안, 특정 정도의 변화들은 또한 생성될 것이다. 모터의 노화, 새로운 모터 및 이전 모터는 제어 정확성 및 지속성의 요소들이다. 수명 시간 내에서, 모터 자석의 자속은 온도 변화로 인해 소자될 것이다. 게다가, 모터 샤프트 실패 및 시스템의 안전성의 잠재적 위험들은 실시간으로 검출되거나 모니터되어야 한다. 4) 공기 송풍기: 공기 송풍기는 모터 샤프트 상에 장착되고, 회전에 의해 생성된 공기 흐름은 특정 속도이다. 장착 포지션은 동작에 영향을 줘서, 마찰 증가, 낮은 흐름 볼륨 및 심지어 잘못된 회전 방향을 초래한다. 5) 필터: 필터는 교체되어야 하고 정규 간격들에 유지되어야 한다. 그러나, 오랜 시간 동안 추적을 실패하는 것이 가능하다. 이것은 마찰을 증가시킬 것이고 추가로 공기 흐름 압력에 영향을 줄 것이다. 6) 파이프 제어: 파이프 시스템은 변화할 것 같다. 먼지, 파이프 파열, 구역 제어 및 스위칭 온/오프 공기 포트들은 시스템 압력 변화이다. 상기 실제 조건들에 따라, 일정한 공기 흐름 제어가 수행되는 경우 많은 불안정한 요소들이 유발될 것이다.
도 3, 도 4 및 도 5에 도시된 바와 같이, PM 모터는 통상적으로 모터 제어기(2) 및 단일 모터 바디(1)로 이루어진다. 단일 모터 바디(1)는 고정자 어셈블리(12), 회전자 어셈블리(13) 및 인클로저(enclosure) 어셈블리(11)를 포함한다. 회전자 어셈블리(13)는 인클로저 어셈블리(11) 상에 장착된다. 단일 모터 바디(1)는 회전자의 포지션을 검출하기 위한 홀 센서(14)를 가진다. 회전자 어셈블리(13)는 고정자 어셈블리(12) 내측에 또는 외측에 싸여진다. 모터 제어기(2)는 제어 박스(22) 및 제어 박스(22) 내에 장착된 제어 회로 기판(21)을 포함한다. 제어 회로 기판(21)은 일반적으로 전원 회로, 마이크로프로세서, 버스 전류 검출 회로, 인버터 회로 및 회전자 포지션 측정 회로(14)(즉, 홀 센서)를 포함한다. 전원 회로는 각각의 회로 부분에 전력을 제공한다. 회전자 포지션 측정 회로는 회전자 포지션 신호를 검출하고 회전자 포지션 신호를 마이크로프로세서에 입력한다. 버스 전류 검출 회로는 검출된 버스 전류를 마이크로프로세서에 입력한다. 버스 전압 검출 회로는 DC 버스 전압을 프로세서에 입력한다. 마이크로프로세서는 인버터 회로를 제어하고, 인버터 회로는 고정자 어셈블리(12)의 각각의 위상 코일 권선이 스위칭 온되거나 오프되게 제어한다.
실시예 1
도 6 및 도 7에 도시된 바와 같이, PM 모터가 3상 무브러쉬 DC 영구 자석 동기 모터인 것이 가정된다. 회전자 포지션 측정 회로(14)는 일반적으로 3개의 홀 센서들을 이용한다. 3개의 홀 센서들은 각각 360°전기 각 사이클에서 회전자의 포지션을 검출한다. 고정자 어셈블리(12)의 각각의 위상 코일 권선의 전력-온(power-on)은, 3상 6단계 제어 모드를 형성하기 위하여 일단 모든 각각의 120°전기 각에서 변경된다. AC 입력은 다이오드들(D7, D8, D9 및 D10)로 이루어진 전-파 정류 회로를 통해 통과하고, 그 다음 DC 버스 전압(Vbus)은 캐패시터(C1)의 하나의 단자로부터 출력된다. DC 버스 전압(Vbus)은 입력 AC 전압에 관련된다. AC 입력의 전압이 결정된 후, 3상 권선의 선전압(UP)은 PWM 쵸핑 출력 전압이다.  이고, 여기서 w는 마이크로프로세서에 의해 인버터 회로에 입력되는 PWM 신호의 듀티 비율이다. 선전압(UP)을 변경하는 것은 DC 버스 전류(Ibus)를 변경할 수 있다. 인버터 회로는 전자 스위처(switcher)들(Q1, Q2, Q3, Q4, Q5 및 Q6)로 이루어진다. 전자 스위처들(Q1, Q2, Q3, Q4, Q5 및 Q6)의 제어 단자들은 마이크로프로세서에 의해 출력된 6개의 PWM 신호들(P1, P2, P3, P4, P5 및 P6)에 의해 제어된다. 인버터 회로는 또한 버스 전류(Ibus)를 검출하기 위하여 저항기(R1)에 연결된다. 버스 전류 검출 회로는 저항기(R1)의 검출된 버스 전류(Ibus)를 변환하고 그 다음 이를 마이크로프로세서에 송신한다. 모터 입력 전력 제어는 전자 스위처(Q7)에 의해 제어된다. 마이크로프로세서에 의해 출력된 PWM 신호(즉, P0)는 모터 입력 전력을 제어하기 위하여 전자 스위처(Q7)의 스위치 온 시간을 제어한다.
이고, 여기서 w는 마이크로프로세서에 의해 인버터 회로에 입력되는 PWM 신호의 듀티 비율이다. 선전압(UP)을 변경하는 것은 DC 버스 전류(Ibus)를 변경할 수 있다. 인버터 회로는 전자 스위처(switcher)들(Q1, Q2, Q3, Q4, Q5 및 Q6)로 이루어진다. 전자 스위처들(Q1, Q2, Q3, Q4, Q5 및 Q6)의 제어 단자들은 마이크로프로세서에 의해 출력된 6개의 PWM 신호들(P1, P2, P3, P4, P5 및 P6)에 의해 제어된다. 인버터 회로는 또한 버스 전류(Ibus)를 검출하기 위하여 저항기(R1)에 연결된다. 버스 전류 검출 회로는 저항기(R1)의 검출된 버스 전류(Ibus)를 변환하고 그 다음 이를 마이크로프로세서에 송신한다. 모터 입력 전력 제어는 전자 스위처(Q7)에 의해 제어된다. 마이크로프로세서에 의해 출력된 PWM 신호(즉, P0)는 모터 입력 전력을 제어하기 위하여 전자 스위처(Q7)의 스위치 온 시간을 제어한다.
도 8에 도시된 바와 같이, HVAC 시스템의 PM 모터 직접 전력 제어의 일정한 공기 흐름 제어 방법이 도시된다. PM 모터는 윈드 휠을 구동하고 고정자 어셈블리, 영구 자석 회전자 어셈블리 및 모터 제어기를 가진다. 모터 제어기는 마이크로프로세서, 인버터 회로, 회전자 포지션 측정 회로, 버스 전류 검출 회로, 버스 전압 검출 회로 및 모터 입력 전력 제어 회로(도시되지 않음)를 포함하고; 회전자 포지션 측정 회로는 회전자 포지션 신호를 검출하고 회전자 포지션 신호를 마이크로프로세서에 입력하고; 마이크로프로세서는 모터의 실시간 회전 속도(n)를 계산하고; 버스 전류 검출 회로는 버스 전류를 마이크로프로세서에 입력하고; 버스 전압 검출 회로는 DC 버스 전압을 프로세서에 입력하고; 마이크로프로세서는 인버터 회로를 제어하고; 인버터 회로는 고정자 어셈블리의 각각의 위상 코일 권선이 전력 온 또는 오프되게 제어하고; 그리고 마이크로프로세서는 모터 입력 전력 제어 회로를 제어하고, PM 모터 직접 전력 제어의 일정한 공기 흐름 제어 방법은 다음 단계들:
단계 A) 타겟 공기 흐름(IN-CFM)을 수신하거나 미리 설정하기 위하여 모터 제어기를 시작하는 단계;
단계 B) 타겟 공기 흐름(IN-CFM)에 따라 대응하는 함수(P=f(n))를 획득하는 단계 ― n은 회전 속도를 나타내고, P는 모터의 입력 전력을 나타냄 ―;
단계 C) 직접 전력 제어된 일정한 공기 흐름 제어 모드에 진입하는 단계: 상기 진입하는 단계는, 모터가 함수(P=f(n))의 제어 트랙(track)을 따라 안정된 작동 포인트(pt, nt)에 도달하게 하도록, 모터의 속도가 영(zero)일 때 모터를 제어하거나 모터를 시작하는 단계를 포함하고, 여기서  는 일정한 공기 흐름을 충족하는 제어 함수(P=f(n))의 트랙 상에서 한 쌍의 입력 전력 및 회전 속도임;
는 일정한 공기 흐름을 충족하는 제어 함수(P=f(n))의 트랙 상에서 한 쌍의 입력 전력 및 회전 속도임;
단계 D) 직접 전력 제어된 일정한 공기 흐름 제어 모드를 유지하는 단계: 상기 유지하는 단계는 모터의 동작 파라미터들에 따라 모터의 실시간 입력 전력(Pi)을 계산하는 단계, 및  를 계산하는 단계를 포함함;
를 계산하는 단계를 포함함;
단계 E) 전력 증분 값( )이 설정 값(
)이 설정 값( )보다 작으면, 현재 작동 포인트를 유지하는 단계;
)보다 작으면, 현재 작동 포인트를 유지하는 단계;
단계 F) 전력/회전 속도 제어 로직에 의해, 전력 증분 값( )이 설정 값(
)이 설정 값( )보다 크거나 같으면, 속도 루프의 동작 시간에 도달되었는지를 계산하는 단계, 및 속도 루프의 동작 시간에 아직 도달되지 않으면 현재 작동 포인트를 유지하는 단계; 및
)보다 크거나 같으면, 속도 루프의 동작 시간에 도달되었는지를 계산하는 단계, 및 속도 루프의 동작 시간에 아직 도달되지 않으면 현재 작동 포인트를 유지하는 단계; 및
단계 G) 트랙 상에서 새로운 작동 포인트(Pi, ni))를 실현하기 위하여, 속도 루프의 동작 시간에 이미 도달되었다면  에 따라 속도를 조절하기 위하여 속도 제어 회로에 진입하는 단계, 즉 pt=Pi 및 nt=ni를 가정하는 단계, 및 단계 C로 되돌아가는 단계를 포함하는 것을 특징으로 하고, 여기서 ni는 실시간 회전 속도이다.
에 따라 속도를 조절하기 위하여 속도 제어 회로에 진입하는 단계, 즉 pt=Pi 및 nt=ni를 가정하는 단계, 및 단계 C로 되돌아가는 단계를 포함하는 것을 특징으로 하고, 여기서 ni는 실시간 회전 속도이다.
상기 함수(P=f(n))는: 처음에는 본래의 데이터를 수집하고, 자주 몇몇 타겟 공기 흐름들에 관하여 낮은 정압으로부터 높은 정압으로 조절하고 ― 여기서 정압은 실제로 적용된 정압 범위를 커버할 수 있음 ―; 정압을 조절하는 프로세스에서 모터가 일정한 회전 속도 제어되게 하고, 모터의 회전 속도(n) 및 실시간 입력 전력(Pi)을 조절함으로써 공기 흐름이 타겟 공기 흐름이게 유지하고, 그리고 이 순간에 모터의 안정된 회전 속도(n) 및 대응하는 실시간 입력 전력(Pi)을 레코딩하고, 이에 따라 회전 속도(n) 및 실시간 입력 전력(Pi)의 그룹이 몇몇 타겟 공기 흐름들 각각에 관하여 생성되고; 그리고 그 다음, 곡선 피팅(fitting) 방법에 의해 몇몇 타겟 공기 흐름들의 각각에 대응하는 함수(P=f(n))를 생성하는 방식으로 획득된다.
외부 입력 타겟 공기 흐름 값(IN-CFM)이 상기 결정된 몇몇 타겟 공기 흐름들 중 하나와 동일하지 않으면, 임의의 외부 입력 타겟 공기 흐름 값(IN-CFM)에 대응하는 함수(P=f(n))는, 전체 과정 중에 임의의 타겟 공기 흐름의 일정한 공기 흐름 제어를 실현하기 위하여, 보간 방법에 의해 피팅 및 계산될 수 있다.
함수 관계(P=f(n))는 다항식 함수( )이고, 여기서
)이고, 여기서  는 모든 계수들이고, n은 모터의 회전 속도 값을 나타내고, 타겟 공기 흐름들의 각각은 계수들(
는 모든 계수들이고, n은 모터의 회전 속도 값을 나타내고, 타겟 공기 흐름들의 각각은 계수들( )의 그룹에 대응하고, 그리고 계수들은 저장되고; 그리고 마이크로프로세서는 함수 관계(P=f(n))를 획득하기 위하여 입력 타겟 공기 흐름 값(IN-CFM)에 따라 테이블 룩업 방법 또는 보간 방법에 의해 계수들(
)의 그룹에 대응하고, 그리고 계수들은 저장되고; 그리고 마이크로프로세서는 함수 관계(P=f(n))를 획득하기 위하여 입력 타겟 공기 흐름 값(IN-CFM)에 따라 테이블 룩업 방법 또는 보간 방법에 의해 계수들( )의 대응하는 그룹을 획득한다.
)의 대응하는 그룹을 획득한다.
함수 관계(P=f(n))는 2차 함수( )이다.
)이다.
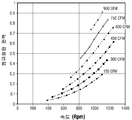
본 발명에 의해 제공되는 직접 전력 제어되는 일정한 공기 흐름 제어 방법(일정한 공기 흐름 제어 장치 방법을 위한 직접 P 제어)의 전개 및 수학 모델은: 일반적으로, 통풍 시스템에서, 팬이 정상 상태에서 공기 흐름을 생성하기 위하여 PM 모터 구동기에 의해 구동되는 방식으로 수립된다. 일정한 공기 흐름 제어는 관계식(CFM=F(P, 속도, 압력))을 참조하여, 정적 압력하에서 속도 및 전력을 제어함으로써 실현되고, 여기서 CFM은 공기 흐름을 나타내고, P는 전력을 나타내고, 속도는 속도를 나타내고, 그리고 압력은 정압을 나타낸다. 정압이 변화될 때, 일정한 공기 흐름은 전력 및 속도를 제어하는 것을 통하여 유지된다. 정압의 증가로 인해, 전력 및 속도는 또한 정압에 따라 변화한다. 일정한 공기 흐름(CFM) 곡선들의 클러스터는 도 9에 도시된 바와 같이 결정될 수 있다. 이들 일정한 공기 흐름(CFM) 곡선들에 기초하여, 제어 모델이 개발된다. 프러덕트 제어가 공기 흐름 요건들을 결정할 때, 일정한 공기 흐름(CFM)은 특정 정압 하에서 전력 및 속도를 제어함으로써 제공된다. 도 9에서, 특성 곡선들은 전력 및 속도의 제어를 유지하는 일정한 공기 흐름 물리적 특성들을 표현한다. 모든 모터들의 정격 전력 범위 내에서, 임의의 설계의 공기 흐름 시스템들의 공기 컨디셔너 제조자들을 위하여, 전력 및 속도 곡선들의 테스트 결과들에 기초하여, 통상적인 이차 함수가 모델( )을 개발 및 수립하기 위한 통상적인 함수로서 더 우수하게 사용될 수 있다는 것이 결론 내려질 수 있다. 곡선들 상에서 3개의 결정되지 않은 포인트들(A, B 및 C), 즉 대응하는 좌표들에서 데이터(p1, n1), (p2, n2) 및 (p3, n3)를 선택함으로써, 계수들(C1, C2 및 C3)은, 다음 식을 참조하여 획득된다:
)을 개발 및 수립하기 위한 통상적인 함수로서 더 우수하게 사용될 수 있다는 것이 결론 내려질 수 있다. 곡선들 상에서 3개의 결정되지 않은 포인트들(A, B 및 C), 즉 대응하는 좌표들에서 데이터(p1, n1), (p2, n2) 및 (p3, n3)를 선택함으로써, 계수들(C1, C2 및 C3)은, 다음 식을 참조하여 획득된다:  ; 상기 방정식은
; 상기 방정식은  ,
,  및
및 
 , 및 그 다음 m=3에 의해 해결된다.
, 및 그 다음 m=3에 의해 해결된다.
곡선 피팅 프로세스는: 곡선을 설명하기 위하여 다항식을 선택하는 것이고; 다항식의 계수들은 최소 제곱 방법에 의해 획득될 수 있다. 이론적으로,  이 사용될 수 있지만, 실제로, 선택된 2항식은 일반 요건들을 충족할 수 있다. 함수 관계(P=f(n))는 2차 함수(
이 사용될 수 있지만, 실제로, 선택된 2항식은 일반 요건들을 충족할 수 있다. 함수 관계(P=f(n))는 2차 함수( )이고, 여기서
)이고, 여기서  ,
,  및
및  는 모두 계수들이고, n은 모터의 회전 속도 값을 나타내고, 몇몇 결정된 타겟 공기 흐름들 중 임의의 하나는 계수들(
는 모두 계수들이고, n은 모터의 회전 속도 값을 나타내고, 몇몇 결정된 타겟 공기 흐름들 중 임의의 하나는 계수들( ,
,  및
및  )의 그룹에 대응하고, 그리고 계수들은 저장되고; 그리고 마이크로프로세서는 함수 관계(P=f(n))를 획득하기 위하여 입력 타겟 공기 흐름 값(IN-CFM)에 따른 테이블을 찾음으로써 계수들(
)의 그룹에 대응하고, 그리고 계수들은 저장되고; 그리고 마이크로프로세서는 함수 관계(P=f(n))를 획득하기 위하여 입력 타겟 공기 흐름 값(IN-CFM)에 따른 테이블을 찾음으로써 계수들( ,
,  및
및  )의 대응하는 그룹을 획득한다. 특정 로드에서, 각각의 타겟 공기 흐름은 계수들(
)의 대응하는 그룹을 획득한다. 특정 로드에서, 각각의 타겟 공기 흐름은 계수들( ,
,  및
및  )의 그룹에 대응하고, 상기 그룹은 다음 표 1로서 구체적으로 도시된다.
)의 그룹에 대응하고, 상기 그룹은 다음 표 1로서 구체적으로 도시된다.
| CFM |
|
|
|
| 150 | 0.338 | -0.151 | 0.0458 |
| 300 | 0.4423 | -0.2113 | 0.0765 |
| 450 | … | … | … |
| 600 | … | … | … |
| 750 | … | … | … |
| 900 | … | … | … |
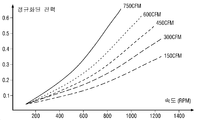
도 10은 작은 파이프를 가진 HVAC 시스템에서 1/3HP PM 모터의 직접 전력 제어된 일정한 공기 흐름의 실험 데이터의 피팅 곡선이다. 주어진 타겟 공기 흐름에 관하여, 시스템은 수학적 모델링을 위한 데이터베이스를 수립하기 위하여 테스트 포인트들로서 몇몇 통상적인 공기 흐름들(CFM)을 선택한다. 이들 통상적인 포인트들은 프러덕트 사양에 따라 첨부된 몇몇 중간 포인트들을 가진 최소 및 최대 공기 흐름 값들을 포함한다. 테스트 포인트들로서 5개의 통상적인 공기 흐름들(CFM), 즉 각각 150/300/450/600 및 750CFM이 있다.
표 2는 테스트 데이터의 결과의 예를 도시한다. 모터의 회전 속도 범위는 200 내지 1400rpm이고, 시스템의 정압은 0.1 내지 1  이다. 미리 설정된 일정한 공기 흐름(CCFM) 출력을 유지함으로써, 도 10의 모터 입력 전력에 대응하는 단위 값은 데이터베이스를 형성하기 위하여 획득된다.
이다. 미리 설정된 일정한 공기 흐름(CCFM) 출력을 유지함으로써, 도 10의 모터 입력 전력에 대응하는 단위 값은 데이터베이스를 형성하기 위하여 획득된다.
| 150CFM 공기 흐름 | 300CFM 공기 흐름 | 450CFM 공기 흐름 | 600CFM 공기 흐름 | 750CFM 공기 흐름 | |||||
| 회전 속도 | 전력 | 회전 속도 | 전력 | 회전 속도 | 전력 | 회전 속도 | 전력 | 회전 속도 | 전력 |
| 385.3 | 3.6% | 452.2 | 6.9% | 590.1 | 14.8% | 693.6 | 26.6% | 822.9 | 45.6% |
| 385.9 | 3.6% | 577.7 | 10.6% | 680.6 | 19.6% | 763.9 | 31.6% | 878.1 | 50.4% |
| 531 | 6.0% | 700.3 | 14.6% | 778.5 | 24.7% | 839.3 | 37.2% | 936 | 56.4% |
| 637.3 | 8.6% | 787.5 | 18.4% | 858.4 | 29.8% | 905 | 43.2% | 997.9 | 63.9% |
| 737.4 | 11.6% | 861.2 | 22.2% | 940.5 | 35.2% | 987.8 | 50.6% | 1056 | 70.5% |
| 818.4 | 14.4% | 932.6 | 26.2% | 1015 | 41.0% | 1051 | 57.0% | 1115 | 77.1% |
| 891 | 17.4% | 997.9 | 30.5% | 1078 | 45.6% | 1127 | 64.1% | 1176 | 83.3% |
| 970.3 | 21.5% | 1053 | 34.2% | 1146 | 51.6% | 1184 | 70.2% | 1173 | 83.2% |
| 1029 | 24.8% | 1119 | 39.7% | 1197 | 56.6% | 1245 | 75.0% | ||
| 1100 | 28.3% | 1165 | 43.1% | 1252 | 61.6% | ||||
| 1163 | 32.4% | ||||||||
최소 제곱 방법에 의해, 미리 결정된 CFM 공기 흐름의 각각에 대응하는 전력 및 회전 속도의 2차 함수는 표준 계산 방법에 의해 획득된다: 이들 방정식들에 의해 정의된 전력 및 특정 정압 하에서 임의의 시스템의 작동 포인트의 속도. 입력 공기 흐름(IN-CFM)이 미리 설정될 때, 모터 시스템은 IN-CFM에 대응하는 함수를 정의하고, 이의 작동 포인트들의 트랙은 함수 정의를 따른다. 방정식들 (3)-(7)은 표준 방정식들을 표현할 수 있고, 여기서  ,
,  및
및  는 모두 정수들이다:
는 모두 정수들이다:

따라서,  이 획득된다. 방정식들 (3)-(7)의 곡선들을 모델링하는 것은 몇몇 일정한 공기 흐름들(CFM)에 대해 요구된 5개의 선택된 작동 포인트들의 트랙들을 제공하고, 여기서 전력은 전력을 나타내고, n은 회전 속도를 나타낸다.
이 획득된다. 방정식들 (3)-(7)의 곡선들을 모델링하는 것은 몇몇 일정한 공기 흐름들(CFM)에 대해 요구된 5개의 선택된 작동 포인트들의 트랙들을 제공하고, 여기서 전력은 전력을 나타내고, n은 회전 속도를 나타낸다.
도 11에 도시된 바와 같이, 요청된 일정한 공기 흐름(IN-CFM)이 모델링 곡선들 중 하나가 아니면, 요청된 일정한 공기 흐름(IN-CFM)을 피팅하기 위한 새로운 특성 방정식은 보간 방법에 의해 획득된다. 예컨대, 요청된 일정한 공기 흐름(IN-CFM) 요청이 수신될 때, 2개의 인접한 모델링 곡선들(CFM1-600cfm 및 CFM2-450cfm)은 식별될 수 있다. 그 다음, 2개의 대응하는 방정식들은 IN-CFM=625cfm 곡선의 새로운 방정식을 계산하기 위해 사용될 수 있다. 요청된 IN-CFM=525cfm에 기초하여, 3개의 선택된 속도들( )은 계산되고, 그 다음 P 값은 선형 가중 보간을 통하여 선택된 속도에서 2개의 전력포인트들에 관하여 2개의 모델 곡선들의 방정식들을 사용함으로써 계산될 수 있다. 첫째, 매트릭스 데이터는 하기와 같이 리스팅(list)된다:
)은 계산되고, 그 다음 P 값은 선형 가중 보간을 통하여 선택된 속도에서 2개의 전력포인트들에 관하여 2개의 모델 곡선들의 방정식들을 사용함으로써 계산될 수 있다. 첫째, 매트릭스 데이터는 하기와 같이 리스팅(list)된다:

선택된 속도( )에 대응하는 한 쌍의 전력 포인트들(p1i, p2i), 및 3쌍의 전력 포인트들(p1i, p2i)에 대응하는 선택된 속도(
)에 대응하는 한 쌍의 전력 포인트들(p1i, p2i), 및 3쌍의 전력 포인트들(p1i, p2i)에 대응하는 선택된 속도( )에 대해, Pi 값은 선형 가중 보간에 의해 계산될 수 있다:
)에 대해, Pi 값은 선형 가중 보간에 의해 계산될 수 있다:
가중 값(W)은  방식으로 계산된다.
방식으로 계산된다.


따라서, IN-CFM=525cfm에 대응하는 함수( )가 획득될 수 있다. 매트릭스 방정식을 풀기 위하여, 계수들(C1, C2 및 C3)이 계산될 수 있다. 그러므로, 임의의 입력 공기 흐름(IN-CFM)에 대해, 전력 방정식이 획득될 수 있다. 이 프로세스는 모터 제어기의 마이크로프로세서(즉, 단일 칩)의 초기화 동안 끝날 수 있고, 따라서 전력의 계산은 더 많은 실시간 CPU 자원을 소비하도록 요구받지 않는다.
)가 획득될 수 있다. 매트릭스 방정식을 풀기 위하여, 계수들(C1, C2 및 C3)이 계산될 수 있다. 그러므로, 임의의 입력 공기 흐름(IN-CFM)에 대해, 전력 방정식이 획득될 수 있다. 이 프로세스는 모터 제어기의 마이크로프로세서(즉, 단일 칩)의 초기화 동안 끝날 수 있고, 따라서 전력의 계산은 더 많은 실시간 CPU 자원을 소비하도록 요구받지 않는다.
모터의 실시간 입력 전력(Pi)은 로우-패스 디지털 필터에 의해 프로세스되고: 무한 펄스 응답 필터의 필터 기술이 적용되고, 입력 및 출력이 샘플링 기간 내에서(PWM 스위치 주파수) 샘플링되는 것이 가정된다. 전력 입력의 시퀀스는 ( )으로서 표현되고, 전력 출력의 시퀀스는 (
)으로서 표현되고, 전력 출력의 시퀀스는 (
 )으로서 표현된다. 동일한 시간 포인트에 대응하여, 로우-패스 필터는
)으로서 표현된다. 동일한 시간 포인트에 대응하여, 로우-패스 필터는  로서 고려될 수 있고, 여기서, T는 시간 상수를 나타낸다.
로서 고려될 수 있고, 여기서, T는 시간 상수를 나타낸다.
상기 아이템들 이후, 반복 관계 및 이산 시간이 다시 주어지고, 로우-패스 필터는 지수적으로 가중된 이동 평균으로서 표현될 수 있다:


정의에 따라, 평활화 팩터는  이다. 만약
이다. 만약  이면, 시간 상수는 샘플링 기간과 동일하다. 만약
이면, 시간 상수는 샘플링 기간과 동일하다. 만약  이면, 시간 상수는 확실히 샘플링 간격보다 크다.
이면, 시간 상수는 확실히 샘플링 간격보다 크다.

전력 필터는 DPC에 의해 제어되고,  이다. 그러므로
이다. 그러므로  이다.
이다.
필터 출력으로부터 다음 필터 출력으로의 변화는 이전 출력과 입력 사이의 차이에 비례한다. 이런 평활화 지수적 디케이(decay) 비율은 연속적인 시간 시스템에 도시된다. 예상된 바와 같이, 시간의 증가에 따라, 이산 시간의 평활화 팩터(α)는 감소하고, 전력 출력의 시퀀스는 (
 )으로서 표현되고, 반응은 비교적 느리고, 그리고 전력 입력의 시퀀스는 (
)으로서 표현되고, 반응은 비교적 느리고, 그리고 전력 입력의 시퀀스는 ( )으로서 표현된다. 그러므로, 시스템은 더 높은 관성을 가진다.
)으로서 표현된다. 그러므로, 시스템은 더 높은 관성을 가진다.
이 필터 기술은 또한 DC 버스 전압 및 DC 버스 전류의 2개의 신호들을 프로세스 및 계산하기 위하여 적용될 수 있다.
DPC(직접 전력 제어)가 회전 속도 제어를 사용함으로써 전력 제어를 실현하는 것이 보여질 수 있다. 전력/회전 속도 제어 로직은 시스템의 안정성을 보장하기 위하여 전력/회전 속도 회로 시간 상수를 조정함으로써 기능한다. 제어는 제어 모터의 정확한 제어 및 토크 제어를 통해 비교될 수 있다. 스칼라 제어이든 벡터 제어이든, 속도 제어는 토크 제어보다 훨씬 효과적이고, 따라서 제어 정확성이 개선된다.
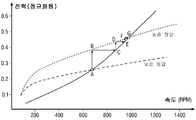
DPC 제어는 고유 전력 및 팬 로드 속도 특성을 통해 속도 제어를 실현한다. 모터가 영의 회전 속도로부터 높은 회전 속도로 동작될 때, 전력은 또한 영으로부터 증가한다. 모터의 회전 속도는 도 13에 도시된 바와 같이, 최대 한 쌍의 작동 포인트 A(전력, 속도), 즉 정압 포인트까지 상승할 것이다. 정압이 갑자기 증가할 때, 모터는 속도 제어 모드 하에서 속도를 유지하기 위하여 더 많은 전력(또는 더 큰 토크)을 제공한다. 더 높은 정압이 더 큰 전력을 요구함에 따라, 전력은 더 높은 전력까지 갑자기 상승할 것이다. 모터 시스템이 동일한 속도에서 새로운 작동 포인트 "B"에 도달할 때, 알고리즘은, 한 쌍의 전력/속도 포인트 "C"를 결정하기 위하여, 새로운 작동 포인트 "B"가 일정한 CFM 트랙 곡선 작동 포인트인지를 인식할 것이다. 그러나, C 포인트는 안정된 작동 포인트가 아니다. 높은 전력에 대한 요건으로 인해, "D" 포인트는, 새로운 안정된 작동 포인트 "G"가 그런 반복으로 수렴될 때까지 제거되고, 프로세스는 종료된다.
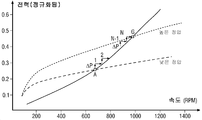
구현 동안, 전력의 변동 및 갑작스러운 변화는 제한된 전력 증가 제어를 사용함으로써 감소될 수 있다. 도 14에 도시된 바와 같이, 전력 증분은  로서 표기된다. 속도 제어는, 전력 변화가 전력 증분(
로서 표기된다. 속도 제어는, 전력 변화가 전력 증분( )을 초과하는 한 수행될 수 있다. 이런 방식으로, 모든 작동 포인트들은 대응하는 일정한 공기 흐름(CFM)의 트랙 곡선들의 포지티브/네거티브 대역폭 하에서 작동한다. 공기 흐름 제어 시스템은 정압 변화의 전이(transient) 프로세스에서 안정하다.
)을 초과하는 한 수행될 수 있다. 이런 방식으로, 모든 작동 포인트들은 대응하는 일정한 공기 흐름(CFM)의 트랙 곡선들의 포지티브/네거티브 대역폭 하에서 작동한다. 공기 흐름 제어 시스템은 정압 변화의 전이(transient) 프로세스에서 안정하다.
도 15에 도시된 바와 같이, 모터에 대한 상기 직접 전력 제어된 일정한 공기 흐름 제어 방법 및 알고리즘은 우리의 PM 모터 제어기에서 테스트되었다. 모든 시스템 성능들은 도 15에 도시된 요건들을 충족한다.
도 12는 PM 모터 스칼라 제어 애플리케이션에서 이 알고리즘의 로직도이다. 입력 전력은 DC 버스 전압 및 전류로부터 계산된다. 전력 및 회전 속도는 최대 전력( ) 및 최대 회전 속도(
) 및 최대 회전 속도( ) 내로 제한된다.
) 내로 제한된다.
피드백 DC 버스 전류/전압에 따라 모터의 실시간 입력 전력(Pi)을 계산함으로써, 모터 입력 전력의 계산된 값(Pt)은 외부 입력 공기 흐름(IN-CFM) 및 전력/속도 데이터 매칭에 따라 획득된다. 그 다음, 전력 차이( )는 모터 입력 전력의 계산된 값(Pt)을 모터의 실시간 입력 전력(Pi)과 비교함으로써 얻어진다. 전력 차이(
)는 모터 입력 전력의 계산된 값(Pt)을 모터의 실시간 입력 전력(Pi)과 비교함으로써 얻어진다. 전력 차이( )는 제한되고, 이에 의해 너무 큰 전력 차이(
)는 제한되고, 이에 의해 너무 큰 전력 차이( )로 인한 전력 조절의 너무 큰 변동이 회피된다. 전력 차이(
)로 인한 전력 조절의 너무 큰 변동이 회피된다. 전력 차이( )는 속도 제어를 수행하기 위하여 전력/속도 제어 로직에 의해 출력되고, PWM 주파수 컨버터는 회전 속도 제어를 수행한다.
)는 속도 제어를 수행하기 위하여 전력/속도 제어 로직에 의해 출력되고, PWM 주파수 컨버터는 회전 속도 제어를 수행한다.
실시예 2: 이 실시예와 실시예 1 사이의 가장 큰 차이는 모터의 실시간 입력 전력(Pi)의 계산에 있다. 실시예 1에서, 스칼라 제어가 이용되고, 즉 모터의 실시간 입력 전력은 수집된 실시간 버스 전류( )와 실시간 버스 전압으로부터 계산된다:
)와 실시간 버스 전압으로부터 계산된다:  . 그러나, 이 실시예에서 PM 모터는 센서들 없이 벡터 제어를 이용하고, 따라서 모터의 실시간 입력 전력(Pi)의 계산은 비교적 복잡해진다.
. 그러나, 이 실시예에서 PM 모터는 센서들 없이 벡터 제어를 이용하고, 따라서 모터의 실시간 입력 전력(Pi)의 계산은 비교적 복잡해진다.
도 16 및 도 17에 도시된 바와 같이, PM 모터가 회전자 포지션 센서들 없이 벡터 제어에 기초하는 3상 무브러쉬 DC 영구 자석 동기 모터인 것이 가정된다. 위상 전력 검출 회로는 고정자 권선의 위상 전류를 검출하고 그 다음 위상 전류를 마이크로프로세서에 입력한다. 마이크로프로세서에서 흐름 관찰자는 위상 전류 및 DC 버스 전압에 따라 회전자의 회전 속도(n) 및 포지션을 계산한다. AC 입력은 다이오드들(D7, D7, D9 및 D10)로 이루어진 전-파 정류 회로를 통해 통과하고 그 다음 DC 버스 전압( )은 캐패시터(C1)의 하나의 단자로부터 출력된다. DC 버스 전압(
)은 캐패시터(C1)의 하나의 단자로부터 출력된다. DC 버스 전압( )은 입력 AC 전압에 관련된다. 도 18은 통상적인 벡터 제어의 블록도이다.
)은 입력 AC 전압에 관련된다. 도 18은 통상적인 벡터 제어의 블록도이다.
도 19에 도시된 바와 같이, 통상적인 벡터 제어의 좌표 시스템들의 다이어그램이 도시된다. 벡터 제어는 텍스트북(textbook)들 및 특허 문헌들에 상세히 기록되어 있고, 따라서 여기서 반복되지 않을 것이다. 제어될 타겟 회전 속도가 알려지면, 폐루프 제어는 벡터 제어에 의해 실현될 수 있다. 도면에 3개의 좌표 시스템들, 즉 고정된 데카르트 좌표 시스템( 좌표), 회전자 회전 좌표(d-q 축 좌표) 및 고정자 자속 회전 좌표 시스템(ds-qs 축 좌표)이 있다. 도면에서,
좌표), 회전자 회전 좌표(d-q 축 좌표) 및 고정자 자속 회전 좌표 시스템(ds-qs 축 좌표)이 있다. 도면에서,  는 회전자의 속도를 나타내고,
는 회전자의 속도를 나타내고,  는 d-q 축 좌표와 ds-qs 축 좌표 사이의 회전 각을 나타내고,
는 d-q 축 좌표와 ds-qs 축 좌표 사이의 회전 각을 나타내고,  는 d-q 축 좌표와 ds-qs 축 좌표의 회전 로드 각을 나타낸다. 그러므로, d-q 축 좌표 시스템의 벡터 전류 및 벡터 전압은
는 d-q 축 좌표와 ds-qs 축 좌표의 회전 로드 각을 나타낸다. 그러므로, d-q 축 좌표 시스템의 벡터 전류 및 벡터 전압은  좌표 시스템의 전류 및 전압으로 변환된다.
좌표 시스템의 전류 및 전압으로 변환된다.
도 16 및 도 17에 도시된 벡터 제어 동안, 모터 동작 파라미터 검출 회로는 위상 전류 검출 회로 및 버스 전압 검출 회로를 포함한다. 위상 전류 검출 회로 및 버스 전압 검출 회로는 위상 전류 및 버스 전압 데이터를 검출하고 그 다음 이들을 마이크로프로세서에 입력한다. 실시간 위상 전류 및 실시간 버스 전압( )은
)은  및
및  좌표들에서 전류들(
좌표들에서 전류들( 및
및  ) 및 전압들(
) 및 전압들( 및
및  )로 변환된다. 모터의 실시간 전력 입력은
)로 변환된다. 모터의 실시간 전력 입력은  (
( )이다.
)이다.
도 20에 도시된 바와 같이, 센서들 없이 벡터 제어 PM 모터 시스템에서 DPC 일정한 공기 흐름 제어 방법의 로직도가 도시된다. 입력 전력은 벡터 제어에 의해 계산된다. 전력은 필터링되고 그 다음 전력 제어에 사용된다. 자속 관찰자는 회전자의 회전 속도 및 포지션을 추정한다. 외부 입력 공기 흐름(IN-CFM) 및 전력/속도 데이터 매칭에 따라, 모터 입력 전력의 대응하는 계산된 값(Pt)은 함수(P=f(n))에 의해 계산된다. 그 다음, 전력 차이( )는 모터 입력 전력의 계산된 값(Pt)을 모터의 실시간 출력 전력(Pi)과 비교함으로써 획득된다. 전력 차이(
)는 모터 입력 전력의 계산된 값(Pt)을 모터의 실시간 출력 전력(Pi)과 비교함으로써 획득된다. 전력 차이( )가 제한되면, 이에 의해 너무 큰 전력 차이(
)가 제한되면, 이에 의해 너무 큰 전력 차이( )로 인한 전력 조절의 너무 큰 변동이 회피된다. 전력 차이(
)로 인한 전력 조절의 너무 큰 변동이 회피된다. 전력 차이( )는 속도 제어를 수행하기 위하여 전력/속도 제어 로직에 의해 출력되고, 속도 루프 제어는 벡터 제어에 의해 실현된다.
)는 속도 제어를 수행하기 위하여 전력/속도 제어 로직에 의해 출력되고, 속도 루프 제어는 벡터 제어에 의해 실현된다.
Claims (20)
- HVAC(Heating, Ventilation, and Air Conditioning) 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법으로서,
(a) 상기 모터의 모터 제어 작동 포인트를 획득하기 위하여 상기 모터의 전력 및 속도를 결정하는 단계 ― 상기 모터 제어 작동 포인트는 상기 모터의 전력 및 속도를 지정함 ―;
(b) 상기 HVAC 시스템에 대한 타겟 공기 흐름 레이트(rate)를 획득하는 단계;
(c) 상기 HVAC 시스템에서 상기 타겟 공기 흐름 레이트를 생성하는 상기 모터의 타겟 공기 흐름 작동 포인트를 결정하는 단계 ― 상기 타겟 공기 흐름 작동 포인트는, 적어도 부분적으로, 상기 HVAC 시스템에 대해 획득된 타겟 공기 흐름 레이트에 기초하여 결정되고, 상기 타겟 공기 흐름 작동 포인트는 상기 HVAC 시스템에서 상기 타겟 공기 흐름 레이트를 생성하는 상기 모터의 상기 전력 및 속도를 지정함 ―;
(d) 상기 모터 제어 작동 포인트가 상기 모터의 상기 타겟 공기 흐름 작동 포인트에 동일한지를 결정하는 단계; 및
(e) 상기 모터 제어 작동 포인트가 상기 타겟 공기 흐름 작동 포인트에 동일하지 않을 때 상기 모터의 전력과 속도를 연속적으로 조절하는 단계 ― 상기 모터의 전력과 속도를 연속적으로 조절하는 단계는 모터 전력을 조절하고 후속하여 모터 속도를 조절하는 단계를 포함하고, 상기 모터 전력 및 속도는, 상기 모터의 전력과 속도를 연속적으로 조절하는 단계 전후에 상기 HVAC 시스템에 의해 제공되는 공기 흐름이 상기 타겟 공기 흐름 레이트로 일정하게 유지되도록 상기 모터의 상기 모터 제어 작동 포인트가 상기 타겟 공기 흐름 작동 포인트와 동일할 때까지 연속적으로 조절됨 ―
를 포함하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 1 항에 있어서,
상기 HVAC 시스템에서 상기 타겟 공기 흐름 레이트를 생성하는 상기 모터의 상기 타겟 공기 흐름 작동 포인트를 결정하는 단계는 일정한 공기 흐름 모델 상에서 상기 타겟 공기 흐름 작동 포인트를 식별하는 단계를 포함하고, 상기 일정한 공기 흐름 모델은 상기 HVAC 시스템에서 상기 타겟 공기 흐름 레이트를 생성하는 복수의 모터 제어 작동 포인트들을 지정하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 2 항에 있어서,
상기 모터 제어 작동 포인트가 상기 모터의 상기 타겟 공기 흐름 작동 포인트에 동일한지를 결정하는 단계는, 상기 모터 제어 작동 포인트가 상기 일정한 공기 흐름 모델 상에서 식별된 상기 타겟 공기 흐름 작동 포인트에 동일한지를 결정하는 단계를 포함하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 3 항에 있어서,
상기 전력을 조절하는 단계는, 상기 모터 제어 작동 포인트가 상기 일정한 공기 흐름 모델 상의 상기 타겟 공기 흐름 작동 포인트에 동일하지 않을 때, 상기 모터의 상기 모터 제어 작동 포인트가 상기 일정한 공기 흐름 모델 상의 상기 타겟 공기 흐름 작동 포인트에 동일할 때까지 상기 모터의 속도를 조절하는 단계를 포함하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 2 항에 있어서,
상기 타겟 공기 흐름 레이트보다 높은 상기 HVAC 시스템에서 일정한 공기 흐름 레이트를 생성하는 제 1 일정한 공기 흐름 모델 상의 상기 모터 제어 작동 포인트들과, 상기 타겟 공기 흐름 레이트보다 낮은 상기 HVAC 시스템에서 일정한 공기 흐름 레이트를 생성하는 제 2 일정한 공기 흐름 모델 상의 상기 모터 제어 작동 포인트들 사이를 보간함으로써 상기 일정한 공기 흐름 모델을 결정하는 단계를 더 포함하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 1 항에 있어서,
적어도 부분적으로, 상기 모터에 커플링된 인버터 상의 직류(DC) 버스 전압 및 DC 버스 전류의 순시 값들에 기초하여 상기 전력을 결정하는 단계를 더 포함하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 1 항에 있어서,
적어도 부분적으로, 상기 모터에 커플링된 인버터 상의 직류(DC) 버스 전압 및 상기 모터의 위상 전류들에 기초하여 상기 전력을 결정하는 단계를 더 포함하고, 상기 위상 전류들은 상기 모터의 고정자의 복수의 위상 권선들 상의 전류들에 대응하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 1 항에 있어서,
상기 모터 제어 작동 포인트가 상기 타겟 공기 흐름 작동 포인트에 동일할 때 상기 모터의 상기 모터 제어 작동 포인트를 일정하게 유지하는 단계를 더 포함하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 1 항에 있어서,
상기 모터가 상기 HVAC 시스템에서 일정한 공기 흐름을 제공하도록 단계들 (a)-(e)를 반복하는 단계를 더 포함하는,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - 제 1 항에 있어서,
상기 모터는 영구 자석 모터인,
HVAC 시스템에서 가변 속도 모터로 일정한 공기 흐름을 제공하기 위한 방법. - HVAC(Heating, Ventilation, and Air Conditioning) 시스템에서 일정한 공기 흐름을 제공하기 위한 장치로서,
가변 속도 모터; 및
상기 가변 속도 모터에 커플링되고 상기 가변 속도 모터의 동작을 제어하도록 구성된 모터 제어기
를 포함하고, 상기 모터 제어기는:
(a) 상기 모터의 모터 제어 작동 포인트를 획득하기 위하여 상기 모터의 전력 및 속도를 결정하는 단계 ― 상기 모터 제어 작동 포인트는 상기 모터의 전력 및 속도를 지정함 ―;
(b) 상기 HVAC 시스템에 대한 타겟 공기 흐름 레이트(rate)를 획득하는 단계;
(c) 상기 HVAC 시스템에서 상기 타겟 공기 흐름 레이트를 생성하는 상기 모터의 타겟 공기 흐름 작동 포인트를 결정하는 단계 ― 상기 타겟 공기 흐름 작동 포인트는, 적어도 부분적으로, 상기 HVAC 시스템에 대해 획득된 타겟 공기 흐름 레이트에 기초하여 결정되고, 상기 타겟 공기 흐름 작동 포인트는 상기 HVAC 시스템에서 상기 타겟 공기 흐름 레이트를 생성하는 상기 모터의 상기 전력 및 속도를 지정함 ―;
(d) 상기 모터 제어 작동 포인트가 상기 모터의 상기 타겟 공기 흐름 작동 포인트에 동일한지를 결정하는 단계; 및
(e) 상기 모터 제어 작동 포인트가 상기 타겟 공기 흐름 작동 포인트에 동일하지 않을 때 상기 모터의 전력과 속도를 연속적으로 조절하는 단계 ― 상기 모터의 전력과 속도를 연속적으로 조절하는 단계는 모터 전력을 조절하고 후속하여 모터 속도를 조절하는 단계를 포함하고, 상기 모터 전력 및 속도는, 상기 모터의 전력과 속도를 연속적으로 조절하는 단계 전후에 상기 HVAC 시스템에 의해 제공되는 공기 흐름이 상기 타겟 공기 흐름 레이트로 일정하게 유지되도록 상기 모터의 상기 모터 제어 작동 포인트가 상기 타겟 공기 흐름 작동 포인트와 동일할 때까지 연속적으로 조절됨 ―
를 수행하도록 구성된 프로세서를 포함하는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 11 항에 있어서,
상기 HVAC 시스템에서 상기 타겟 공기 흐름 레이트를 생성하는 상기 모터의 상기 타겟 공기 흐름 작동 포인트를 결정하는 단계를 수행하도록 구성된 프로세서는 일정한 공기 흐름 모델 상에서 상기 타겟 공기 흐름 작동 포인트를 식별하는 단계를 수행하도록 구성된 프로세서를 포함하고, 상기 일정한 공기 흐름 모델은 상기 HVAC 시스템에서 상기 타겟 공기 흐름 레이트를 생성하는 복수의 모터 제어 작동 포인트들을 지정하는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 12 항에 있어서,
상기 모터 제어 작동 포인트가 상기 모터의 상기 타겟 공기 흐름 작동 포인트에 동일한지를 결정하는 단계를 수행하도록 구성된 프로세서는, 상기 모터 제어 작동 포인트가 상기 일정한 공기 흐름 모델 상에서 식별된 상기 타겟 공기 흐름 작동 포인트에 동일한지를 결정하는 단계를 수행하도록 구성된 프로세서를 포함하는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 13 항에 있어서,
상기 전력을 조절하는 단계를 수행하도록 구성된 프로세서는, 상기 모터 제어 작동 포인트가 상기 일정한 공기 흐름 모델 상의 상기 타겟 공기 흐름 작동 포인트에 동일하지 않을 때, 상기 모터의 상기 모터 제어 작동 포인트가 상기 일정한 공기 흐름 모델 상의 상기 타겟 공기 흐름 작동 포인트에 동일할 때까지 상기 모터의 속도를 조절하는 단계를 수행하도록 구성된 프로세서를 포함하는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 12 항에 있어서,
상기 프로세서는 상기 타겟 공기 흐름 레이트보다 높은 상기 HVAC 시스템에서 일정한 공기 흐름 레이트를 생성하는 제 1 일정한 공기 흐름 모델 상의 상기 모터 제어 작동 포인트들과, 상기 타겟 공기 흐름 레이트보다 낮은 상기 HVAC 시스템에서 일정한 공기 흐름 레이트를 생성하는 제 2 일정한 공기 흐름 모델 상의 상기 모터 제어 작동 포인트들 사이를 보간함으로써 상기 일정한 공기 흐름 모델을 결정하는 단계를 수행하도록 추가로 구성되는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 11 항에 있어서,
상기 프로세서는, 적어도 부분적으로, 상기 모터에 커플링된 인버터 상의 직류(DC) 버스 전압 및 DC 버스 전류의 순시 값들에 기초하여 상기 전력을 결정하는 단계를 수행하도록 추가로 구성되는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 11 항에 있어서,
상기 프로세서는, 적어도 부분적으로, 상기 모터에 커플링된 인버터 상의 직류(DC) 버스 전압 및 상기 모터의 위상 전류들에 기초하여 상기 전력을 결정하는 단계를 수행하도록 추가로 구성되고, 상기 위상 전류들은 상기 모터의 고정자의 복수의 위상 권선들 상의 전류들에 대응하는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 11 항에 있어서,
상기 프로세서는, 상기 모터 제어 작동 포인트가 상기 타겟 공기 흐름 작동 포인트에 동일할 때 상기 모터의 상기 모터 제어 작동 포인트를 일정하게 유지하는 단계를 수행하도록 추가로 구성되는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 11 항에 있어서,
상기 프로세서는, 상기 모터가 상기 HVAC 시스템에서 일정한 공기 흐름을 제공하도록 단계들 (a)-(e)를 반복하는 단계를 수행하도록 추가로 구성되는,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치. - 제 11 항에 있어서,
상기 모터는 영구 자석 모터인,
HVAC 시스템에서 일정한 공기 흐름을 제공하기 위한 장치.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2014/071723 WO2015113237A1 (zh) | 2014-01-28 | 2014-01-28 | Pm电机直接功率控制的恒风量控制方法及其应用的hvac系统 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167023352A Division KR102009450B1 (ko) | 2014-01-28 | 2014-01-28 | Pm 모터의 직접 전력 제어에 의한 일정한 공기 볼륨 제어를 위한 방법 및 상기 방법을 적용하는 hvac 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180017228A true KR20180017228A (ko) | 2018-02-20 |
Family
ID=53756131
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187003539A KR20180017228A (ko) | 2014-01-28 | 2014-01-28 | Pm 모터의 직접 전력 제어에 의한 일정한 공기 볼륨 제어를 위한 방법 및 상기 방법을 적용하는 hvac 시스템 |
| KR1020167023352A KR102009450B1 (ko) | 2014-01-28 | 2014-01-28 | Pm 모터의 직접 전력 제어에 의한 일정한 공기 볼륨 제어를 위한 방법 및 상기 방법을 적용하는 hvac 시스템 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167023352A KR102009450B1 (ko) | 2014-01-28 | 2014-01-28 | Pm 모터의 직접 전력 제어에 의한 일정한 공기 볼륨 제어를 위한 방법 및 상기 방법을 적용하는 hvac 시스템 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US10066631B2 (ko) |
| EP (1) | EP3104094B1 (ko) |
| JP (1) | JP6340434B2 (ko) |
| KR (2) | KR20180017228A (ko) |
| BR (1) | BR112016017031B1 (ko) |
| CA (1) | CA2859557C (ko) |
| DK (1) | DK3104094T3 (ko) |
| ES (1) | ES2847417T3 (ko) |
| MX (1) | MX345746B (ko) |
| PT (1) | PT3104094T (ko) |
| WO (1) | WO2015113237A1 (ko) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105629814B (zh) * | 2014-10-29 | 2018-03-02 | 中山大洋电机股份有限公司 | 一种具有抽风或者送风功能的电器设备的恒风量控制方法 |
| US10145576B2 (en) * | 2015-03-06 | 2018-12-04 | Mitsubishi Electric Research Laboratories, Inc. | System and method for controlling operations of air-conditioning system |
| CN105136380B (zh) * | 2015-08-19 | 2017-12-26 | 珠海格力电器股份有限公司 | 管网静压值的测量方法、装置和系统 |
| US10653990B2 (en) * | 2016-10-24 | 2020-05-19 | Automatic Air, Llc | Airflow controller for ducting |
| US11867417B2 (en) | 2017-02-09 | 2024-01-09 | James Eric Taylor | On-site controller for an HVAC system |
| CN106907346B (zh) * | 2017-02-27 | 2018-05-25 | 杭州志驱传动技术有限公司 | 一种控制方法 |
| US11101759B2 (en) | 2017-05-15 | 2021-08-24 | Regal Beloit America, Inc. | Motor controller for electric blower motors |
| US10294950B2 (en) | 2017-05-15 | 2019-05-21 | Regal Beloit America, Inc. | Motor controller for electric blower motors |
| DE102018104396A1 (de) | 2018-02-27 | 2019-08-29 | Ebm-Papst Mulfingen Gmbh & Co. Kg | Parameterkonstanz |
| US10619879B2 (en) * | 2018-03-21 | 2020-04-14 | Mitsubishi Electric Research Laboratories, Inc. | System and method for controlling operations of air-conditioning system |
| US11209298B2 (en) * | 2018-04-27 | 2021-12-28 | Hitachi Metals, Ltd. | Thermal mass flow sensor with improved accuracy |
| WO2019241272A1 (en) | 2018-06-11 | 2019-12-19 | Broan-Nutone Llc | Ventilation system with automatic flow balancing derived from neural network and methods of use |
| DE102019101022A1 (de) * | 2019-01-16 | 2020-07-16 | Ebm-Papst Mulfingen Gmbh & Co. Kg | Volumenstrombestimmung |
| KR102229871B1 (ko) * | 2019-01-25 | 2021-03-19 | 엘지전자 주식회사 | 공기조화기 및 그의 제어방법 |
| JP7312065B2 (ja) * | 2019-09-11 | 2023-07-20 | 日立Astemo株式会社 | モータ制御装置、機電一体ユニット、発電機システム、モータ駆動装置および電動車両システム |
| US11499372B2 (en) | 2019-10-28 | 2022-11-15 | Halliburton Energy Services, Inc. | Downhole tractor control systems and methods to adjust a load of a downhole motor |
| US11146195B2 (en) * | 2019-11-27 | 2021-10-12 | Infineon Technologies Austria Ag | Fail-safe function for a permanent magnet synchronous motor |
| CN111854070B (zh) * | 2020-06-09 | 2022-03-08 | 海信(山东)空调有限公司 | 一种空调及风量控制方法 |
| CN113266927B (zh) * | 2021-05-20 | 2022-04-15 | 四川长虹空调有限公司 | 新风系统保障风量的方法 |
| CN113266935B (zh) * | 2021-05-20 | 2022-04-08 | 四川长虹空调有限公司 | 新风设备安装后风机转速调整方法 |
| US11708986B1 (en) * | 2022-07-12 | 2023-07-25 | Intellytic Ventures Ltd | Smart IoT energy saving sound wave air filter system and use for air purifiers and a method of air filtration thereof |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4806833A (en) | 1986-09-22 | 1989-02-21 | General Electric Company | System for conditioning air, method of operating such, and circuit |
| US5197667A (en) | 1991-01-18 | 1993-03-30 | Emerson Electric Co. | Hvac low power usage circulation blower |
| US5736823A (en) | 1994-05-27 | 1998-04-07 | Emerson Electric Co. | Constant air flow control apparatus and method |
| US5447414A (en) | 1994-05-27 | 1995-09-05 | Emerson Electric Co. | Constant air flow control apparatus and method |
| JP2004177063A (ja) * | 2002-11-29 | 2004-06-24 | Hitachi Home & Life Solutions Inc | 空気調和機 |
| JP2006003015A (ja) * | 2004-06-18 | 2006-01-05 | Fujitsu General Ltd | 空気調和機の制御方法 |
| US7216049B2 (en) | 2004-06-23 | 2007-05-08 | Whirlpool Corporation | Method for calibrating current offset and filtering bad data in a system that detects power output |
| US8702482B2 (en) * | 2004-12-07 | 2014-04-22 | Trane International Inc. | Ventilation controller |
| EP2128977A4 (en) * | 2007-03-27 | 2018-01-24 | Panasonic Corporation | Motor control device, its control method, and motor device |
| JP2009195065A (ja) | 2008-02-15 | 2009-08-27 | Daikin Ind Ltd | 電力算出装置、空気調和装置ならびに電力算出方法 |
| ES2683235T3 (es) * | 2008-05-27 | 2018-09-25 | Fisher & Paykel Healthcare Limited | Control de temperatura de cámara humidificadora para un control preciso de la humedad |
| US20100256821A1 (en) | 2009-04-01 | 2010-10-07 | Sntech Inc. | Constant airflow control of a ventilation system |
| JP5373863B2 (ja) | 2011-08-04 | 2013-12-18 | シャープ株式会社 | 同期モータ駆動装置およびそれを備えた冷凍サイクルを有する機器 |
| JP5494620B2 (ja) * | 2011-11-10 | 2014-05-21 | ダイキン工業株式会社 | Vav式空調システム |
| CN202550949U (zh) * | 2012-04-16 | 2012-11-21 | 杭州锐方科技有限公司 | 一种基于转矩补偿的直流无刷电机恒风量控制装置 |
| CN102748843B (zh) | 2012-07-24 | 2014-07-23 | 海信(山东)空调有限公司 | 风管式空调室内机恒风量控制系统及方法 |
| CN202889281U (zh) * | 2012-10-10 | 2013-04-17 | 中山大洋电机股份有限公司 | 一种变速风机电机 |
-
2014
- 2014-01-28 JP JP2016565531A patent/JP6340434B2/ja active Active
- 2014-01-28 DK DK14881059.1T patent/DK3104094T3/da active
- 2014-01-28 CA CA2859557A patent/CA2859557C/en active Active
- 2014-01-28 US US14/375,889 patent/US10066631B2/en active Active
- 2014-01-28 KR KR1020187003539A patent/KR20180017228A/ko not_active Application Discontinuation
- 2014-01-28 ES ES14881059T patent/ES2847417T3/es active Active
- 2014-01-28 WO PCT/CN2014/071723 patent/WO2015113237A1/zh active Application Filing
- 2014-01-28 MX MX2014016103A patent/MX345746B/es active IP Right Grant
- 2014-01-28 PT PT148810591T patent/PT3104094T/pt unknown
- 2014-01-28 EP EP14881059.1A patent/EP3104094B1/en active Active
- 2014-01-28 BR BR112016017031-8A patent/BR112016017031B1/pt active IP Right Grant
- 2014-01-28 KR KR1020167023352A patent/KR102009450B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| KR102009450B1 (ko) | 2019-08-09 |
| KR20160113678A (ko) | 2016-09-30 |
| MX345746B (es) | 2017-02-14 |
| JP2017505894A (ja) | 2017-02-23 |
| ES2847417T3 (es) | 2021-08-03 |
| EP3104094B1 (en) | 2020-12-16 |
| EP3104094A1 (en) | 2016-12-14 |
| PT3104094T (pt) | 2020-12-28 |
| CA2859557A1 (en) | 2015-07-28 |
| WO2015113237A1 (zh) | 2015-08-06 |
| EP3104094A4 (en) | 2017-10-18 |
| US20160281723A1 (en) | 2016-09-29 |
| JP6340434B2 (ja) | 2018-06-06 |
| DK3104094T3 (da) | 2021-01-25 |
| US10066631B2 (en) | 2018-09-04 |
| BR112016017031A2 (ko) | 2017-08-08 |
| CA2859557C (en) | 2020-12-22 |
| BR112016017031B1 (pt) | 2022-08-02 |
| MX2014016103A (es) | 2016-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102009450B1 (ko) | Pm 모터의 직접 전력 제어에 의한 일정한 공기 볼륨 제어를 위한 방법 및 상기 방법을 적용하는 hvac 시스템 | |
| KR101815408B1 (ko) | 팬 모터의 풍량 측정 방법 | |
| US9547974B2 (en) | Device for detecting blockage of air filter mesh | |
| US9903380B2 (en) | Fan | |
| US9732976B2 (en) | Direct power control for constant airflow control with advanced motor system modeling | |
| CN104807152B (zh) | Pm电机直接功率控制的恒风量控制方法及其应用的hvac系统 | |
| CA2950794C (en) | Method for controlling constant air volume of electrical device with air exhaust or air supply function | |
| JP2017500470A5 (ko) | ||
| CN103954023A (zh) | 空调器的压缩机的控制方法、控制装置以及空调器 | |
| CN106154871B (zh) | 一种电器设备的通风管道堵塞程度实时显示控制方法 | |
| WO2016127650A1 (zh) | 一种电子换相电机的恒力矩控制方法 | |
| WO2013159458A1 (zh) | 一种电机及空调风机系统的恒风量控制方法 | |
| WO2016011617A1 (zh) | 一种送风设备的滤网堵塞检测方法及其应用的送风设备 | |
| CN106152385B (zh) | 一种风机电机的控制方法及一种空调的控制方法 | |
| US20230015685A1 (en) | Electronically commutated motor zero-watt standby power consumption | |
| WO2021147321A1 (zh) | 一种恒风量引风机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |