KR20170112391A - 무가선 노면전차 시스템 - Google Patents
무가선 노면전차 시스템 Download PDFInfo
- Publication number
- KR20170112391A KR20170112391A KR1020160039399A KR20160039399A KR20170112391A KR 20170112391 A KR20170112391 A KR 20170112391A KR 1020160039399 A KR1020160039399 A KR 1020160039399A KR 20160039399 A KR20160039399 A KR 20160039399A KR 20170112391 A KR20170112391 A KR 20170112391A
- Authority
- KR
- South Korea
- Prior art keywords
- battery
- vehicle
- driven vehicle
- streetcars
- battery replacement
- Prior art date
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61B—RAILWAY SYSTEMS; EQUIPMENT THEREFOR NOT OTHERWISE PROVIDED FOR
- B61B1/00—General arrangement of stations, platforms, or sidings; Railway networks; Rail vehicle marshalling systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/02—Manipulators mounted on wheels or on carriages travelling along a guideway
-
- B60L11/1822—
-
- B60L11/1851—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/80—Exchanging energy storage elements, e.g. removable batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61C—LOCOMOTIVES; MOTOR RAILCARS
- B61C17/00—Arrangement or disposition of parts; Details or accessories not otherwise provided for; Use of control gear and control systems
- B61C17/06—Power storing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61C—LOCOMOTIVES; MOTOR RAILCARS
- B61C17/00—Arrangement or disposition of parts; Details or accessories not otherwise provided for; Use of control gear and control systems
- B61C17/12—Control gear; Arrangements for controlling locomotives from remote points in the train or when operating in multiple units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61C—LOCOMOTIVES; MOTOR RAILCARS
- B61C3/00—Electric locomotives or railcars
- B61C3/02—Electric locomotives or railcars with electric accumulators
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T30/00—Transportation of goods or passengers via railways, e.g. energy recovery or reducing air resistance
Abstract
본 발명은 상부에 착탈하여 교체 가능한 배터리를 구동차량 및 종동차량에 내장한 노면전차와 노면전차의 배터리를 교체하는 배터리교체스테이션을 구비하여 가선에 의한 전력 공급 없이도 장거리 운행이 가능한 무가선 노면전차 시스템에 관한 것이다.
Description
본 발명은 배터리 교체식 노면전차 시스템에 관한 것으로, 보다 상세하게는 상부에 착탈하여 교체 가능한 배터리를 내장한 전차와 전차의 배터리를 교체하는 교체 스테이션을 구비하여 가선에 의한 전력 공급 없이도 장거리 운행이 가능하여 최소의 시설 비용으로 배기가스의 배출이 없는 친환경 교통수단을 제공하는 무가선 노면전차 시스템에 관한 것이다.
최근 몇 년간 환경오염 등 문제가 대두되어 사람들은 에너지 절감 및 환경보호 등을 실현할 수 있는 새로운 교통수단들을 연구개발하고 새로운 교통수단으로 천연가스 차량, 수소연료 차량, 메탄올연료 차량, 연료전지 차량, 태양에너지 차량, 복합연료(multi-fuel) 차량 및 전기 자동차 등이 개발되고 있다. 그 중에서도 성능 및 종합 데이터로부터 볼 경우 전기 자동차는 가장 뛰어난 성능을 구비하여 신규 교통수단으로 될 가능성이 가장 크다.
대중 교통에서도 배기가스가 없는 교통수단으로 전기버스, 가선형 노면전차, 하이브리드 노면전차의 사용 가능성이 대두되어 있다. 그러나, 전기버스의 경우 운행 노선의 자유로움 등의 장점은 있으나 운행 가능 거리가 짧아, 도시에 적용되기 어려우며, 노면전차의 경우 가선의 설치에 따른 설치 비용의 부담 및 미관 상의 문제가 있다.
이에 본 발명은 상기와 같은 문제점들을 해결하기 위하여, 노면전차의 상부에 착탈식으로 교체가 용이한 배터리를 수납하고, 운행 중 노면전차의 배터리를 교체할 수 있는 교체 스테이션을 구비하며, 복수의 노면전차 간에 설치된 배터리들에 저장된 전력을 통합하여 제어하는 것을 통해 전력 효율을 향상하여 장거리 운행이 가능한 무가선 노면전차 시스템을 제공함에 있다.
본 발명의 일 실시예에 따른 노면에 설치된 레일을 따라 운행하는 무가선 노면전차 시스템은 착탈 가능한 배터리, 배터리가 장착되는 배터리장착모듈 및 배터리관리부를 포함하는 구동차량과, 구동차량에 연결되어 견인되고 착탈 가능한 배터리, 배터리장착모듈 및 배터리 전력을 상기 구동차량으로 전송할 수 있는 전력전송단자를 포함하는 종동차량으로 구성된 무가선 노면전차 및 무가선 노면전차의 레일 설치 경로에 위치하고, 구동차량 또는 종동차량 중 적어도 어느 한 차량에서 배터리를 분리하고, 충전된 배터리를 차량에 장착하는 배터리 교체로봇을 포함하는 배터리교체스테이션으로 구성된다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 배터리관리부는 구동차량 또는 종동차량에 설치된 배터리의 출력전압, 출력전류, 온도, 충전횟수 중 적어도 하나의 정보를 포함하는 배터리 상태 정보를 제어기로 전송하고, 제어기는 배터리 상태 정보에 따라 상기 노면전차의 운행가능 거리를 산출한다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 제어기는 노면전차의 현재 위치로부터 운행가능 거리 안에 내에 위치하는 배터리교체스테이션에 배터리 교체를 요청한다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 구동차량은 회생 제동 장치를 포함하고, 회생 제동 장치의 회생 전력은 종동차량의 배터리를 충전한다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 구동차량 및 종동차량은 프레임의 상부에 상기 배터리를 고정하는 배터리장착모듈을 포함하고, 배터리를 커버하는 개폐 가능한 개폐도어를 더 포함한다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 배터리관리부는 노면전차의 운행가능거리와 배터리교체스테이션의 이격 거리를 참조하여 구동차량 및 종동차량의 배터리 출력을 제어한다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 배터리교체스테이션은 무가선 노면전차의 배터리 교체 요청에 따라 사전에 충전된 배터리를 교체 대기위치로 이송한다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 배터리교체스테이션은 배터리 교체로봇은 가일드 레일을 따라 수평이동을 하고, 견인 와이어에 의해 수직이동하여 노면전차로부터 배터리를 탈거하고 장착한다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 배터리교체스테이션은 노면전차의 배터리 위치와 배터리 교체로봇의 위치를 정렬하는 정렬센싱부를 구비한다.
본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 배터리교체스테이션의 정렬센싱부는 광학식 또는 전파 송수신 방식 중 어느 하나를 사용한다.
본 발명의 무가선 노면전차 시스템은 배터리 상부장착식 노면전차 및 배터리교체스테이션을 통해 무가선노면전차의 운행거리를 증가하여, 환경 친화적이고 시설 비용이 저렴한 대중 교통을 제공할 수 있다.
도 1은 무가선 노면전차 시스템을 나타낸 개요도이다.
도 2는 무가선 노면전차 시스템의 기능 블럭도이다.
도 3은 노면전차의 배터리관리부의 구성 예시도이다.
도 4는 배터리교체스테이션의 구성 및 작동관계를 나타낸 동작 구성도이다.
도 5는 배터리 교체로봇의 측면도이다.
도 6은 배터리 교체로봇의 배터리 탈거 동작 순서도이다.
도 7은 배터리 교체로봇의 배터리 장착 동작 순서도이다.
도 2는 무가선 노면전차 시스템의 기능 블럭도이다.
도 3은 노면전차의 배터리관리부의 구성 예시도이다.
도 4는 배터리교체스테이션의 구성 및 작동관계를 나타낸 동작 구성도이다.
도 5는 배터리 교체로봇의 측면도이다.
도 6은 배터리 교체로봇의 배터리 탈거 동작 순서도이다.
도 7은 배터리 교체로봇의 배터리 장착 동작 순서도이다.
본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 것이며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하며, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다. 명세서 전체에 걸쳐 동일 참조 부호는 동일 구성 요소를 지칭한다.
공간적으로 상대적인 용어인 "아래(below)", "아래(beneath)", "하부(lower)", "위(above)", "상부(upper)" 등은 도면에 도시되어 있는 바와 같이 하나의 구성 요소들과 다른 소자 또는 구성 요소들과의 상관관계를 용이하게 기술하기 위해 사용될 수 있다. 공간적으로 상대적인 용어는 도면에 도시되어 있는 방향에 더하여 사용시 또는 동작시 소자의 서로 다른 방향을 포함하는 용어로 이해되어야 한다.
본 명세서에서 어떤 부분이 다른 부분과 연결되어 있다고 할 때, 이는 직접적으로 연결되어있는 경우뿐 아니라, 그 중간에 다른 소자를 사이에 두고 전기적으로 연결되어 있는 경우도 포함한다. 또한, 어떤 부분이 어떤 구성 요소를 포함한다고 할 때, 이는 특별히 그에 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있는 것을 의미한다.
본 명세서에서 제 1, 제 2, 제 3 등의 용어는 다양한 구성 요소들을 설명하는데 사용될 수 있지만, 이러한 구성 요소들은 상기 용어들에 의해 한정되는 것은 아니다. 상기 용어들은 하나의 구성 요소를 다른 구성 요소들로부터 구별하는 목적으로 사용된다. 예를 들어, 본 발명의 권리 범위로부터 벗어나지 않고, 제 1 구성 요소가 제 2 또는 제 3 구성 요소 등으로 명명될 수 있으며, 유사하게 제 2 또는 제 3 구성 요소도 교호적으로 명명될 수 있다.
다른 정의가 없다면, 본 명세서에서 사용되는 모든 용어(기술 및 과학적 용어를 포함)는 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 공통적으로 이해될 수 있는 의미로 사용될 수 있을 것이다. 또 일반적으로 사용되는 사전에 정의되어 있는 용어들은 명백하게 특별히 정의되어 있지 않은 한 이상적으로 또는 과도하게 해석되지 않는다.
도 1은 본 발명의 일 실시예에 따른 무가선 노면전차 시스템을 나타낸 개요도이다.
도 2는 본 발명의 일 실시예에 따른 무가선 노면전차 시스템의 기능 블럭도이다.
도 3은 노면전차의 배터리관리부의 구성예시도이다.
도 1 내지 도 3을 참조하면 본 발명의 일 실시예에 따른 무가선 노면전차 시스템은 노면전차(100)의 상부 영역에 설치되는 충전식 배터리(230,330), 충전식 배터리를 노면전차(100)와 연결하는 배터리장착모듈(30), 서로 연결된 차량(200,300) 간의 전력을 교체하고 관리하는 배터리관리부(220,320), 배터리를 충전하고 배터리 교체작업이 이루어지는 배터리교체스테이션(10) 본체, 배터리 교체로봇 및 배터리교체스테이션(10) 제어부를 구비한 것으로, 각 배터리(230,330)를 포함하는 차량(200,300) 간에 전력을 교체하고 제어하는 배터리 관리 시스템을 운영하고, 노면전차(100)의 상부에 위치하는 배터리(230)를 로봇 기술을 통해 빠르고 정확하게 교체하여 무가선 노면전차(100)의 운행 거리를 확장하도록 구현한 것이다.
즉, 본 발명에 따른 무가선 노면전차(100) 시스템은 리튬 이온 배터리와 같은 2차 전지를 이용하여 노면에 설치된 레일(50) 위를 운행하는 전차를 의미한다. 본 발명에서는 배터리(230) 및 구동 모터(240)를 포함하는 구동차량(200)과 구동 모터를 포함하지 않고 승객 탑승을 목적으로 하는 종동차량(300)이 서로 연결된 2량 구성을 기준으로 설명하기로 한다. 노면전차(100)의 구성은 노선에 따른 승객수 및 운행 간격에 따라 구동차량(200)과 종동차량(300)을 다양하게 구성할 수 있다.
구동차량(200)은 에너지원인 배터리(230), 레일 상에 위치한 바퀴를 구동하는 구동 모터(240) 및 노면전차(100)의 주행을 제어하는 제어부(210)를 포함한다. 구동차량(200)에는 승객이 탑승하는 승차 공간이 구비되는 경우도 있지만, 운전 장치 및 구동 장치의 설치로 인해 승객이 탑승할 공간은 종동차량(300)에 비해 협소하다.
종동차량(300)은 구동차량(200)과 연결 고리로 연결되어 견인되는 차량이며, 승객 수송을 목적으로 하여 승객의 탑승 면적이 넓고, 내부에 좌석 및 손잡이를 구비하고 있다. 본 발명의 실시예에 따른 종동차량(300)은 승차 공간의 상부에 배터리장착모듈(30) 및 배터리(330)를 구비한다. 종동차량(300)은 배터리(330)의 입출력단자와 연결되고 차량의 외부로 노출되는 전력전송단자(350)를 구비한다.
구동차량(200)은 제어부(210), 구동모터(240), 배터리(230), 배터리관리부(220) 및 전력전송단자(250)로 구성되고, 종동차량(300)은 배터리(330), 배터리관리부(320) 및 전력전송단자로 구성된다. 구동차량(200)과 종동차량(300)은 전력전송단자(250,350)와 연결된 전력전송케이블(260)을 통해 연결된다.
구동차량(200)의 제어부(210)는 배터리관리부(220)로부터 구동차량(200) 및 종동차량(300)에 설치된 배터리(230,330)의 충전상태 정보를 수신하고, GPS 정보를 통해 노면전차(100)의 위치, 배터리교체스테이션(10)의 위치, 운행 중 소모 전력량 등을 분석하여 노면전차(100)의 운행 가능거리 등의 운행 정보를 제공한다. 노면전차(100)가 운전자에 의해 제어되는 경우 운행 정보에 따라서 구동차량(200) 및 종동차량(300)의 배터리(230,330) 상태를 배터리 교체 시기 및 잔여 배터리 용량을 고려하여 최적화함으로써 노면전차(100)의 운행 거리를 늘릴 수 있다.
예를 들어, 구동차량(200)의 배터리(230) 충전전력은 낮고, 종동차량(300)의 배터리(330) 충전전력은 높은 상태에서, 근거리에 배터리교체스테이션(10)이 위치한다면, 제어부(210)는 구동차량(200)의 배터리(230)를 우선적으로 소모하여 배터리교체스테이션(10)에서 구동차량(200)의 배터리(230)만을 교체하게 요청하도록 할 수 있다. 반면 구동차량(200)의 배터리(230) 충전전력은 낮고, 종동차량(300)의 배터리(330) 충전전력은 높은 상태에서, 원거리에 배터리교체스테이션(10)이 위치한다면, 제어부(210)는 종동차량(300)의 배터리(330)를 우선적으로 소모하여 구동차량(200) 및 종동차량(300)의 배터리(330) 충전전력의 비율이 맞도록 배터리 사용 조건을 제어한다. 이후 배터리교체스테이션(10)에서 구동차량(200) 및 종동차량(300)의 배터리(230,330)를 모두 교체하는 것을 요청할 수 있다.
노면전차(100)에 사용되는 배터리(230,330)는 단위 전지셀이 직렬 및 병렬로 연결된 리튬 이온 배터리로서, 내부를 복수의 세트로 구성하여 어느 한 배터리 모듈에서 고장이 발생하더라도 차량에 전력을 공급할 수 있도록 구성되는 것이 바람직하다.
또한, 본 발명의 실시예와 같이 종동차량(300)에 배터리(330)를 추가적으로 구비함으로써, 무가선 노면전차(100)의 운행거리를 확장하는 것이 가능하다.
노면전차(100)의 배터리(230,330)는 교체가 가능한 위치라면 차량의 어느 곳에 두어도 가능하나, 승객의 탑승 위치를 기준으로 상부에 배터리(230,330)를 구비하는 것이 바람직하다. 리튬 이온 배터리의 특성상 사용에 따른 발열을 냉각해주어야 하는데, 차량의 하부에 위치하는 경우 배터리를 냉각하기 어려우며, 특히 여름철에 노면으로부터의 복사열로 인해 배터리의 온도가 급격하게 올라가는 문제가 있다. 또한, 노면전차(100)는 다수가 이용하는 대중 교통의 특성으로 인해 사고 및 충격에 따른 화재 발생에 따른 인명 피해가 발생하지 않도록 배터리의 상부에 위치하는 것이 가장 바람직하다.
도 3을 참조하면 배터리관리부(220,320)는 배터리(230,330)의 출력 전압, 출력 전류, 온도를 검출하는 전압 센싱부(221,321), 전류 센싱부(222,322), 온도 센싱부(223,323)를 각각 구비하고, 검출된 배터리(230,330)의 정보를 바탕으로 배터리(230,330)의 충전 상태(SOC, State Of Charge) 및 잔여수명을 산출한다. 상기 배터리(230,330)의 충전상태 산출은, 기본적으로는 출력전압과 충전상태의 상관관계를 나타내는 수식이나 맵핑된 데이터(특정 전압 값에 대응되는 SOC가 나타나 있는 데이터)를 이용하여 계산 또는 결정할 수 있다. 이러한 충전상태의 산출에 있어서 배터리(230,330)의 온도 정보를 추가하여 보다 정밀한 충전상태를 산출할 수 있다.
배터리(230,330)의 잔여 수명의 산출은, 예를 들어 주기적으로 센싱된 배터리(230,330)의 전압 값을 바탕으로 시간에 따른 전압 변화율을 계산하여, 계산된 결과를 저장된 기준 데이터(특정한 전압 변화율에 따른 잔여 수명 값 표)와 비교함으로써 결정될 수 있다.
산출부로부터 출력된 배터리(230,330)의 충전 상태 및 잔여수명 정보는 제어부(210)에 전송된다. 제어부(210)는 구동차량(200) 및 종동차량(300)의 배터리(230,330) 정보를 취합하여 노면전차(100)의 주행에 필요한 구동전력량과 냉난방 및 조명 등 부가적인 전기 설비에 사용되는 부가 전력량을 추산하여 노면전차(100)의 운행 가능 거리를 판단한다.
제어부(210)는 노면전차(100)의 운행 중에 충전된 배터리(230,330) 전력 부족이 발생하지 않도록 사용전력이 급격하게 증가하는 경우에는 과방전 상태를 운전자에게 경고하여 불필요 전력의 차단 또는 배터리(230,330)의 교체 등의 조치가 이루어질 수 있도록 한다.
제어부(210)는 구동전차(200)의 구동모터(240)를 가동하고, 구동전차(200)에 회생 제동기능을 적용하여 구동모터(240)로부터 전력을 회수한다. 회생 제동이란 전동차의 제동 시에 구동모터를 전동기 역할로 전환하여 제동 주행에 따른 움직임을 통해 전기 에너지를 발전하고, 발생된 전기 에너지를 회수하는 기술이다. 회생 제동 시에 발생된 전기 에너지는 주파수가 일정하지 않는 교류형태를 가지므로 컨버터를 통해서 저장 가능한 직류 전기의 변환하여 배터리(230,330)에 저장한다. 회생 제동을 통해 노면전차(100)의 소비전력을 감소시킬 수 있어 주행거리를 증가시키는 효과가 있다. 제어부(210)는 구동차량(200)의 배터리(230)에 회생 전력을 충전할 수도 있고, 각 배터리 교체 스케줄 및 배터리의 충전 상태에 따라서 종동차량(300)의 배터리(330)에 저장하는 것도 가능하다.
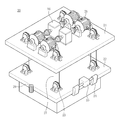
도 4는 배터리교체스테이션의 구성 및 작동관계를 나타낸 동작 구성도이다.
도 4를 참조하면 노면전차(100)의 상부 프레임에 배터리(230)가 탈착 가능하게 장착되어 있다. 구체적으로는 노면전차(100)의 상부 프레임에 배터리장착모듈(30)이 위치하고, 배터리장착모듈(30)에 의해 배터리(230)가 고정되어 있다. 노면전차(100)의 상부 구조는 개폐가능한 도어를 구비하여 배터리(230)가 개방될 수 있는 구조로 이루어져 있다. 본 실시예에서는 노면전차(100)의 상부를 분할하여 좌우로 개방되는 윙 방식의 개폐도어(235)를 도시하고 있으나, 슬라이딩 방식으로 개폐되는 도어를 설치하여도 가능하다.
한편, 배터리교체스테이션(10)은 수평 프레임과 수직 프레임이 대략 ㄱ자 형상으로 이루어진 승강장의 형태로 설치되어 있다. 여기서, 수직 프레임은 바닥면으로부터 상부의 수평프레임을 지지하는 지지대 기능을 담당하고, 수평 프레임은 배터리(230) 충전 및 배터리 교체로봇(20)의 이동장치 등을 포함한다.
수평 프레임의 저면에는 복수의 배터리장착모듈(30)가 설치되어 있고, 배터리장착모듈(30)들은 배터리(230)를 충전할 수 있고, 충전이 완료된 배터리(230)를 거치하는 기능도 갖는다. 배터리장착모듈(30) 중 적어도 하나의 배터리장착모듈(30)에는 배터리가 장착되지 않은 상태를 유지하여 노면전차(100)의 방전된 배터리(230)를 거치할 수 있는 공간을 제공한다.
노면전차(100)의 방전된 배터리(230)를 제거한 후 배터리교체스테이션(10)에 보관된 충전 완료된 배터리(230)를 노면전차(100)의 배터리장착모듈(30)에 안착하는 방식으로 배터리(230)가 교체될 수 있다.
배터리(230)를 탈착하는 동작은 배터리 교체로봇(20)이 수행한다. 배터리 교체로봇(20)은 수평 프레임 내에 설치된 가이드 레일(40)을 따라 이동한다. 가이드 레일(40)은 교차하는 형태로 배치되어 있는 배터리장착모듈(30)에 배터리를 선택적으로 이송할 수 있게 한다.
도 5는 배터리교체로봇의 측면도이다.
배터리 교체로봇(20)은 상부 프레임(21), 하부 프레임(22), 견인휠(23), 파지수단(24), 파지구동부(25)를 포함한다.
상부 프레임(21)은 플레이트 형상을 가질 수 있다. 견인구동부(26)는 상부 프레임(21)에 배치된다. 상부 프레임(21)의 가장자리에는 슬라이더(미도시)가 배치되며, 상부 프레임의 일측에 이송 모터(미도시)가 배치된다. 슬라이더는 가이드 레일(40)과 접촉하며, 상부 프레임은 이송 모터에 의해 가이드 레일(40)을 따라 이동할 수 있다.
복수개의 견인 와이어(27)는 상부 프레임(21)과 하부 프레임(22)을 연결한다. 견인 와이어(27)의 일부는 권상드럼(28)에 감기고, 견인구동부(26)에 의해 풀림과 감김 동작을 하여 하부 프레임(22)의 수직 위치를 조정한다.
하부 프레임(22)은 플레이트 형상을 가지며, 상부 프레임(21)의 하부에 배치된다. 견인휠(23)은 하부 프레임(22) 상에 이격되어 배치될 수 있다. 파지수단(24)은 하부 프레임(22)의 일측에 배치된다. 다른 한 쌍의 파지수단(24)은 하부 프레임(22)의 타측에 배치된다. 파지수단(24)은 파지구동부(25)에 연결된다. 예컨대, 파지구동부(25)는 모터를 포함할 수 있다. 파지수단(24)는 파지구동부(25)에 의해 파지수단(24)의 회동축을 기준으로 회동된다. 파지수(24)단은 배터리(230)를 잠금 또는 잠금해제 할 수 있다.
또한 하부 프레임(22)은 정렬센싱부(29)를 가질 수 있다. 정렬센싱부(29)는 배터리 교체로봇의 이동, 특히 하부 프레임이 수직하강하여 배터리(230)와 결합되도록 하부 프레임(22)의 위치를 정밀하게 제어한다. 정렬센싱부(29)는 일반적으로 CCD 카메라를 장착하여 촬상된 광원 또는 영상을 분석하는 광학식과 초음파나 레이더와 같이 특정 전파를 송수신하는 방식 등을 적용할 수 있다.
도 6은 배터리 교체로봇의 배터리 탈거 동작 순서도이다.
노면전차(100)가 배터리교체스테이션(10)에 진입하여 지정된 배터리 교체위치에 정차한다(S1001). 이어 노면전차(100)는 배터리교체요청을 배터리교체스테이션(10)에 전송한다(S1002).
배터리교체요청을 전송한 후 노면전차(100)는 배터리(230) 상부의 개폐도어(235)를 개방하여 배터리 교체로봇(20)이 교체 대상 배터리(230)를 인식할 수 있도록 한다(S1003).
배터리교체스테이션(10)은 노면전차(100)로부터 배터리교체요청을 수신한 후 노면전차(10)의 상부로 이동하여 교체대상 배터리(230)의 위치를 파악한다(S2001).
배터리 교체로봇(20)은 수평이동을 통해 노면전차(100)의 상부로 위치를 이동하고(S2002), 견인 와이어(27)를 풀어 하부 프레임(22)을 교체대상 배터리(230)도 접근시키면서 정렬센싱부(29)를 통해 위치를 정밀하게 제어한다(S2003).
이때, 노면전차(100)의 배터리장착모듈(30)은 파지수단을 잠금해제하여 배터리(230)가 탈거될 수 있도록 한 상태로 대기한다(S1004).
배터리 교체로봇(20)의 하부 파지수단(24)이 배터리(230)를 잠금하기 전에 배터리장착모듈(30)의 파지수단이 잠금해제 상태인 것을 재확인한다(S2004).
배터리 교체로봇(20)은 파지수단(24)을 통해 방전된 배터리(230)를 잠금한 후(S2005), 견인 와이어(27)를 감아 하부 프레임(22)을 수직 상승시켜 노면전차(100)의 배터리장착모듈(30)과 방전된 배터리(230)를 분리한다(S2006).
배터리 교체로봇(20)은 수직 및 수평이동하여 방전된 배터리(230)를 재충전할 수 있는 배터리 충전모듈로 이동하고(S2007), 배터리 충전모듈에 장착시킨다(S2008).
배터리교체스테이션(10)은 상기의 프로세스를 통해 노면전차(100)의 상부에 장착된 배터리(230)를 탈거하여 충전할 수 있다.
도 7은 배터리 교체로봇의 배터리 장착 동작 순서도이다.
도 7을 참조하면, 배터리교체스테이션(10)은 노면전차(100)의 방전된 배터리(230)를 탈거한 뒤 배터리교체스테이션(10)의 배터리충전모듈에 대기 중인 완충된 배터리(230)를 노면전차(100)에 장착한다.
배터리교체스테이션(10)의 배터리 교체로봇(20)은 배터리충전모듈의 완충된 배터리(230)의 상부로 이동하여 파지수단(24)을 통해 배터리(230)를 잠금한다(S2009).
배터리 교체로봇(20)은 정차되어 있는 노면전차(100)의 상부까지 수평이동하고, 견인 와이어(27)를 풀어 하부 프레임(22)을 수직하강한다(S2010).
배터리 교체로봇(20)은 하부 프레임(22)에 장착된 정렬센싱부(29)를 통해 배터리장착모듈의 배터리 장착 여부 및 위치를 확인하고(S2011), 완충된 배터리(230)가 배터리장착모듈에 장착될 때까지 하강한다(S2012).
배터리교체스테이션(10)은 배터리 교체로봇(20)의 파지수단(24)을 잠금해제하고(S2013), 하부 프레임(22)을 수직 상승하여 배터리교체스테이션(10)으로 복귀한다(S2014)
또한, 배터리 교체로봇(20)의 잠금해제 상태를 노면전차(100)에 전송한다.
배터리 교체로봇(20)의 잠금해제 상태를 수신한 노면전차(100)는 배터리장착모듈(30)의 파지수단을 작동하여 배터리(230)를 잠금하고(S1005), 노면전차(100)의 상부도어(235)를 닫는다(S1006). 노면전차(100)의 상부도어와 배터리 교체로봇(20)의 충돌이 발생하지 않도록 노면전차(100)와 배터리교체스테이션(10)은 상호 교신을 통해 현재의 상태를 공유하는 것이 바람직하다.
노면전차(100)의 상부도어가 닫힌 후 노면전차(100)의 배터리 장착 상태 점검 및 상부도어 상태를 점검하고(S1007), 이상이 없는 것으로 판단되면 운행을 재개한다(S1008).
배터리교체스테이션(10)은 승객의 승하차장의 기능도 겸하고 있어, 도 6 및 도 7에서 설명한 배터리 교체 동작은 승객의 승하차 동작과 동시에 수행된다. 배터리(230)가 노면전차(100)의 상부에 위치하므로 승객의 승하차 동선과 배터리 교체 동선이 차단되어 빠르고 안전하게 노면전차(100)의 배터리(230)를 교체할 수 있다. 배터리 교체를 통해 노면전차(100)의 운행 거리를 증가시키는 것이 가능하여, 무가선 노면전차(100)가 도심을 비롯하여 외곽지역까지 운행될 수 있게 된다.
100: 노면전차
200: 구동차량
300: 종동차량
10: 배터리교환스테이션
20: 배터리 교체로봇
210: 제어부
220,320: 배터리관리부
230,330: 배터리
240: 구동장치
200: 구동차량
300: 종동차량
10: 배터리교환스테이션
20: 배터리 교체로봇
210: 제어부
220,320: 배터리관리부
230,330: 배터리
240: 구동장치
Claims (10)
- 노면에 설치된 레일을 따라 운행하는 무가선 노면전차 시스템에 있어서,
착탈 가능한 배터리, 배터리가 장착되는 배터리장착모듈 및 배터리관리부를 포함하는 구동차량과,
상기 구동차량에 연결되어 견인되고, 착탈 가능한 배터리 및 배터리장착모듈 및 배터리 전력을 상기 구동차량으로 전송할 수 있는 전력전송단자를 포함하는 종동차량으로 구성된 무가선 노면전차; 및
상기 무가선 노면전차의 레일 설치 경로에 위치하고, 상기 구동차량 또는 종동차량 중 적어도 어느 한 차량에서 배터리를 분리하고, 충전된 배터리를 차량에 장착하는 배터리 교체로봇을 포함하는 배터리교체스테이션으로 구성된 무가선 노면전차 시스템. - 제 1 항에 있어서,
상기 배터리관리부는 구동차량 및 종동차량에 설치된 배터리 각각의 출력전압, 출력전류, 온도, 충전횟수 중 적어도 하나의 정보를 포함하는 배터리 상태 정보를 제어기로 전송하고,
상기 제어기는 상기 배터리 상태 정보에 따라 상기 노면전차의 운행가능 거리를 산출하는 무가선 노면전차 시스템. - 제 2 항에 있어서,
상기 제어기는 노면전차의 현재 위치로부터 운행가능 거리 안에 내에 위치하는 상기 배터리교체스테이션에 배터리 교체를 요청하는 무가선 노면전차 시스템. - 제 3 항에 있어서,
상기 구동차량은 회생 제동 장치를 포함하고,
상기 회생 제동 장치의 회생 전력은 상기 종동차량의 배터리를 충전하는 무가선 노면전차 시스템. - 제 1 항에 있어서,
구동차량 및 종동차량은 프레임의 상부에 상기 배터리를 고정하는 배터리장착모듈을 포함하고,
상기 배터리를 커버하는 개폐 가능한 개폐도어를 더 포함하는 무가선 노면전차 시스템. - 제 2 항에 있어서,
상기 배터리관리부는 노면전차의 운행가능거리와 배터리교체스테이션의 이격 거리를 참조하여 구동차량 및 종동차량의 배터리 출력을 제어한다. - 제 1 항에 있어서,
상기 배터리교체스테이션은 상기 무가선 노면전차의 배터리 교체 요청에 따라 사전에 충전된 배터리를 교체 대기위치로 이송한다. - 제 7 항에 있어서,
상기 배터리교체스테이션의 배터리 교체로봇은 가일드 레일을 따라 수평이동을 하고, 견인 와이어에 의해 수직이동하여 노면전차로부터 배터리를 탈착한다. - 제 8 항에 있어서,
상기 배터리교체스테이션은 노면전차의 배터리 위치와 배터리 교체로봇의 위치를 정렬하는 정렬센싱부를 더 구비한다. - 제 9 항에 있어서,
상기 정렬센싱부는 광학식 또는 전파 송수신 방식 중 적어도 어느 하나인 배터리교체스테이션.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160039399A KR20170112391A (ko) | 2016-03-31 | 2016-03-31 | 무가선 노면전차 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160039399A KR20170112391A (ko) | 2016-03-31 | 2016-03-31 | 무가선 노면전차 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170112391A true KR20170112391A (ko) | 2017-10-12 |
Family
ID=60141164
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160039399A KR20170112391A (ko) | 2016-03-31 | 2016-03-31 | 무가선 노면전차 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170112391A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102066511B1 (ko) * | 2019-07-18 | 2020-01-16 | 인천교통공사 | 기지 스테이션을 구비하는 궤도차량 시스템 |
-
2016
- 2016-03-31 KR KR1020160039399A patent/KR20170112391A/ko not_active Application Discontinuation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102066511B1 (ko) * | 2019-07-18 | 2020-01-16 | 인천교통공사 | 기지 스테이션을 구비하는 궤도차량 시스템 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11641128B2 (en) | Mobile charging stations with fuel-cell generators for electric-drive vehicles | |
| CN103228481B (zh) | 非接触受电装置、非接触输电装置以及非接触送受电系统 | |
| JP5665224B2 (ja) | 蓄電池システム | |
| CA2660509C (en) | Quick-recharging energy feeding system for means of transport with electric traction | |
| RU2660182C2 (ru) | Электрическое транспортное средство и соответствующая транспортная система | |
| US20160009255A1 (en) | System amd method for rapid battery exchange in electric vehicles | |
| JP6603335B2 (ja) | 電源内蔵式鉄道輸送システム | |
| US20160121735A1 (en) | Rapid charging power supply system | |
| MX2010014551A (es) | Estaciones de carga para vehiculos electricos. | |
| JP2012254012A (ja) | 電気自動車のバッテリー交換方法{BatteryExchangingMethodforElectricVehicle} | |
| JP2012080628A (ja) | 電気自動車の充電システム | |
| KR20190044522A (ko) | 전기 모터 구동식 차량 | |
| WO2011099193A1 (ja) | 車両システム、車両システムの制御方法及び交通システム | |
| CN103522992B (zh) | 用于电动车的电池更换式充电站系统 | |
| Bartłomiejczyk et al. | Trolleybus with traction batteries for autonomous running | |
| KR20170112391A (ko) | 무가선 노면전차 시스템 | |
| US20210178930A1 (en) | Combined Removable and Fixed Batteries in Powered Urban Mobility | |
| KR101828161B1 (ko) | 무가선 노면전차 제어시스템 | |
| Ogasa et al. | Development of contact-wire/battery hybrid LRV | |
| Barbosa | Battery electric rail technology review-a technical and operational assessment. Current status, challenges and perspectives | |
| KR20120016715A (ko) | 차상 전지가 구비된 무가선 주행 가능한 저상 노면전차 | |
| KR101475563B1 (ko) | 전력 관리 장치 및 이를 이용한 전력 관리 방법 | |
| CN210634398U (zh) | 一种应用于电动车道路救援的便携式充补电装置 | |
| BE1030772B1 (nl) | Mobiel laadstation en werkwijze om elektrische voertuigen mobiel op te laden | |
| WO2023033556A1 (ko) | 탈부착 보조배터리를 이용한 전기자동차용 주행거리 연장 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |