KR20170063586A - Movement Control Device, Moving Body, Moving Body System, Movement Control Method, and Program - Google Patents
Movement Control Device, Moving Body, Moving Body System, Movement Control Method, and Program Download PDFInfo
- Publication number
- KR20170063586A KR20170063586A KR1020177007588A KR20177007588A KR20170063586A KR 20170063586 A KR20170063586 A KR 20170063586A KR 1020177007588 A KR1020177007588 A KR 1020177007588A KR 20177007588 A KR20177007588 A KR 20177007588A KR 20170063586 A KR20170063586 A KR 20170063586A
- Authority
- KR
- South Korea
- Prior art keywords
- guide
- moving
- distance
- distance information
- movement control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000000034 method Methods 0.000 title claims description 37
- 238000013459 approach Methods 0.000 claims abstract description 10
- 238000001514 detection method Methods 0.000 description 14
- 230000008859 change Effects 0.000 description 13
- 230000007246 mechanism Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 7
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 6
- 239000000463 material Substances 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 239000000725 suspension Substances 0.000 description 4
- 239000000428 dust Substances 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 229910052742 iron Inorganic materials 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/22—Control systems or devices for electric drives
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C19/00—Cranes comprising trolleys or crabs running on fixed or movable bridges or gantries
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Control And Safety Of Cranes (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
이 이동제어장치는, 거리센서를 구비한 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득부와, 상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득부가 취득한 거리정보에 근거하여 특정하는 가이드위치특정부와, 상기 가이드위치특정부가 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어부를 구비한다.The movement control apparatus includes a distance information acquisition unit that acquires distance information indicating a distance between each of a plurality of positions in a direction intersecting with a direction in which a moving path of a moving object with a distance sensor extends, And a guide position specifying unit for specifying a position of a guide provided along a direction in which the movement path extends in a height different from the road surface of the moving path of the moving object based on the distance information acquired by the distance information obtaining unit, And a movement controller for controlling a moving direction of the moving body so that the position of the specific guide approaches the predetermined position.
Description
본 발명은, 이동제어장치, 이동체, 이동체시스템, 이동제어방법 및 프로그램에 관한 것이다.The present invention relates to a mobile control device, a mobile object, a mobile object system, a movement control method, and a program.
타이어식 문형 크레인(Rubber Tired Gantry Crane; RTG)의 주행방향을 제어하는 방법으로서, 가이드라인을 이용하는 방법이 있다. 여기에서 말하는 가이드라인은, 선형상의 가이드이다.As a method of controlling the running direction of a rubber tired gantry crane (RTG), there is a method using a guideline. The guidelines here are linear guides.
예를 들면, 특허문헌 1에는, 좌주행용차륜 및 우주행용차륜의 속도를 각각 제어함으로써, 주행경로에 부설된 가이드라인에 따라 크레인을 주행시키는, 크레인의 주행제어장치가 기재되어 있다. 당해 크레인제어장치는, 가이드라인에 평행한 방향을 따르는 좌주행용차륜과 우주행용차륜의 어긋남량인 차륜어긋남량을 추정하는 차륜어긋남량 추정부와, 차륜어긋남량 추정부에 의하여 추정된 추정차륜어긋남량과, 좌주행용차륜과 상기 우주행용차륜의 좌우차륜간격에 근거하여, 가이드라인과 크레인의 주행방향의 어긋남각도에 대한 정현값인 어긋남각도 정현값을 추정하는 어긋남각도 정현값 추정부를 구비한다.For example, Patent Document 1 discloses a traveling control apparatus for a crane that controls a speed of a left traveling wheel and a space traveling wheel, respectively, so as to run the crane according to a guide line attached to the traveling route. The crane control device includes a wheel slip amount estimating portion for estimating a wheel slip amount which is a shift amount between a wheel for left traveling and a wheel for space running along a direction parallel to a guide line, And a shift angle sine value estimating unit for estimating a shift angle sine value as a sine value with respect to a shift angle of the guide line and the crane in the running direction based on the shift amount and the left and right wheel distances of the left- do.
특허문헌 1에 기재된 크레인의 제어장치에 의하면, 고가의 센서를 이용하지 않고 어긋남각도 정현값을 얻을 수 있다.According to the control apparatus for a crane described in Patent Document 1, a deviation angle sine value can be obtained without using an expensive sensor.
타이어식 문형 크레인 등 이동체의 주행방향을, 가이드라인을 이용하여 제어하는 방식으로서, 백선(白線)방식과 자석방식이 알려져 있다. 백선방식에서는, 노면에 그어진 백선을 가이드라인으로서 이용한다. 한편, 자석방식에서는, 노면에 매립된 자석을 가이드라인으로서 이용한다.As a method of controlling the traveling direction of a moving body such as a tire-type door type crane using a guide line, a white line method and a magnet method are known. In the white line method, a white line drawn on the road surface is used as a guide line. On the other hand, in the magnet system, a magnet embedded in the road surface is used as a guide line.
그러나, 백선방식에서는, 백선이 오염된 경우나 백선 상에 먼지 등이 묻은 경우에, 이동체의 주행을 제어하는 제어장치가, 백선을 검출할 수 없게 될 가능성이 있다. 또한, 백선방식에서는, 비나 눈 등 날씨에 따라서도, 이동체의 주행을 제어하는 제어장치가, 백선을 검출할 수 없게 될 가능성이나, 백선의 위치를 오검출할 가능성이 있다.However, in the white line method, when the white line is contaminated or dust or the like is stained on the white line, the control device that controls the traveling of the mobile may be unable to detect white line. Further, in the white line method, there is a possibility that the control device that controls the traveling of the moving object may erroneously detect the white line or the position of the white line depending on weather such as rain and snow.
또, 자석방식에서는, 자석으로부터의 자력을 자석검출센서로 검출하는 구조로 인하여, 가이드라인의 위치검출의 분해능이 낮아, 이동체의 직진주행성의 저하로 이어진다.Further, in the magnet system, since the magnetic force from the magnet is detected by the magnet detection sensor, the resolution of the position detection of the guideline is low, leading to a decrease in straight running characteristics of the moving body.
도 15는, 자석방식에 있어서의 자석검출센서의 배치예를 나타내는 설명도이다. 동 도면에 있어서, 크레인이 구비하는 복수의 자석검출센서(1011~1021)와, 크레인의 주행경로의 노면(RS)에 매립되어 설치되어 있는 자석(1030)이 나타나 있다.15 is an explanatory view showing an example of the arrangement of the magnet detection sensor in the magnet system. In the drawing, a plurality of
자석검출센서(1011~1021) 중, 자석검출센서(1015~1017)가, 자석(1030)에 의한 자력을 검출하고 있다. 크레인은, 자력을 검출하고 있는 자석검출센서의 위치에 근거하여, 자석의 위치를 추정한다.Among the
이 경우, 자석의 위치검출의 분해능은, 자석검출센서의 설치간격(D1001)의 제약을 받는다. 또, 자석검출센서의 설치간격을 좁게 해도, 자석검출센서 자체의 분해능이나, 복수의 자석검출센서의 감도의 차이에 따라, 자석의 위치검출의 분해능이 올라가질 않을 가능성이 있다.In this case, the resolution of the position detection of the magnet is limited by the installation interval D1001 of the magnet detection sensor. In addition, even if the installation interval of the magnet detection sensor is narrowed, there is a possibility that the resolution of detecting the position of the magnet may not increase depending on the resolution of the magnet detection sensor itself or the difference in sensitivity of the plurality of magnet detection sensors.
본 발명은, 가이드를 검출할 수 없게 될 가능성이나, 가이드의 위치를 오검출할 가능성을 저감시키고, 또한 자석방식의 경우보다 높은 분해능으로 가이드의 위치를 검출할 수 있는, 이동제어장치, 이동체, 이동체시스템, 이동제어방법 및 프로그램을 제공한다.The present invention relates to a movement control device capable of detecting a guide in a non-detectable manner, a possibility of erroneously detecting a position of a guide, and detecting a position of the guide with a resolution higher than that of the magnet type, A mobile system, a movement control method, and a program.
본 발명의 제1 양태에 의하면, 이동제어장치는, 거리센서를 구비한 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득부와, 상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득부가 취득한 거리정보에 근거하여 특정하는 가이드위치특정부와, 상기 가이드위치특정부가 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어부를 구비한다.According to a first aspect of the present invention, there is provided a movement control apparatus comprising a distance sensor for detecting a distance between each of a plurality of positions in a direction intersecting with a direction in which a moving path of a moving object having a distance sensor extends, A guide for specifying a position of a guide provided along a direction in which the moving path extends in a direction different from a road surface of the moving path of the moving object based on the distance information obtained by the distance information obtaining unit, And a movement control unit for controlling the movement direction of the moving body such that the position of the guide is close to a predetermined position.
상기 이동제어부는, 상기 가이드의 높이, 폭, 및 개수 중 적어도 어느 하나에 근거하여, 상기 이동체의 이동속도를 제어하도록 해도 된다.The movement control unit may control the moving speed of the moving body based on at least one of the height, the width, and the number of the guides.
상기 이동제어부는, 상기 가이드의 개수에 근거하여 상기 이동체의 위치를 특정하고, 특정한 위치에 근거하여, 상기 이동체의 이동속도를 제어하도록 해도 된다.The movement control unit may specify the position of the moving object based on the number of the guides and control the moving speed of the moving object based on the specified position.
본 발명의 제2 양태에 의하면, 이동체는, 거리센서와, 이동체 자체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득부와, 상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득부가 취득한 거리정보에 근거하여 특정하는 가이드위치특정부와, 상기 가이드위치특정부가 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어부를 구비한다.According to the second aspect of the present invention, the moving object has distance information indicating a distance between each of the distance sensors and a plurality of positions in the direction intersecting the direction in which the moving path of the moving object itself extends, A guide position specifying unit for specifying a position of a guide provided along a direction in which the moving path extends in a direction different from the road surface of the moving path of the moving object based on the distance information obtained by the distance information obtaining unit, And a movement control unit for controlling the moving direction of the moving body such that the position of the specific guide approaches the predetermined position.
본 발명의 제3 양태에 의하면, 이동체시스템은, 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드와, 거리센서와, 상기 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득부와, 상기 가이드의 위치를, 상기 거리정보취득부가 취득한 거리정보에 근거하여 특정하는 가이드위치특정부와, 상기 가이드위치특정부가 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어부를 구비한다.According to a third aspect of the present invention, a moving object system includes a guide provided along a direction in which the moving path extends in a height different from the road surface of the moving path of the moving object, a distance sensor, a direction in which the moving path of the moving object extends A distance information acquiring unit that acquires distance information indicating a distance between each of the plurality of positions in the direction of intersection and the distance sensor, and a distance information acquiring unit that acquires the position of the guide based on the distance information acquired by the distance information acquiring unit And a movement control unit for controlling the moving direction of the moving body so that the position of the guide, which is specified by the guide position specifying unit, approaches a predetermined position.
상기 가이드는, 상기 이동체의 이동경로가 뻗어 있는 방향을 따라, 노면으로부터 돌출되게 마련되도록 해도 된다.The guide may be provided so as to protrude from the road surface along a direction in which the moving path of the moving body extends.
상기 가이드는, 상기 이동체의 이동경로가 뻗어 있는 방향을 따라, 노면으로부터 오목하게 마련되도록 해도 된다.The guide may be recessed from the road surface along a direction in which the moving path of the moving object extends.
본 발명의 제4 양태에 의하면, 이동제어방법은, 이동제어장치의 이동제어방법으로서, 거리센서를 구비한 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득스텝과, 상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득스텝에서 취득한 거리정보에 근거하여 특정하는 가이드위치특정스텝과, 상기 가이드위치특정스텝에서 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어스텝을 포함한다.According to a fourth aspect of the present invention, there is provided a movement control method of a movement control apparatus, comprising: a movement control method of a movement control apparatus which includes a plurality of positions in a direction intersecting a direction in which a moving path of a moving body, A distance information acquiring step of acquiring distance information indicating a distance between the distance sensors and a position of a guide provided along a direction in which the travel path extends at a height different from the road surface of the travel path of the moving object, And a movement control step of controlling the moving direction of the moving body so that the position of the guide specified in the guide position specifying step is close to a predetermined position.
본 발명의 제5 양태에 의하면, 프로그램은, 컴퓨터에, 거리센서를 구비한 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득스텝과, 상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득스텝에서 취득한 거리정보에 근거하여 특정하는 가이드위치특정스텝과, 상기 가이드위치특정스텝에서 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어스텝을 실행시키기 위한 프로그램이다.According to a fifth aspect of the present invention, there is provided a computer-readable storage medium storing a program that causes a computer to execute a program that causes a computer to display a distance between each of a plurality of positions in a direction intersecting with a direction in which a moving path of a moving object including a distance sensor extends, Based on the distance information acquired in the distance information acquiring step, a position of a guide provided along a direction in which the moving path extends in a height different from the road surface of the moving path of the moving object And a movement control step of controlling the moving direction of the moving body so that the position of the guide specified by the guide position specifying step is close to a predetermined position.
상기한 이동제어장치, 이동체, 이동체시스템, 이동제어방법 및 프로그램에 의하면, 가이드를 검출할 수 없게 될 가능성이나, 가이드의 위치를 오검출할 가능성을 저감시키고, 또한 자석방식의 경우보다 높은 분해능으로 가이드의 위치를 검출할 수 있다.According to the above-described motion control apparatus, moving body, moving body system, motion control method, and program, it is possible to reduce the possibility that the guide can not be detected or the position of the guide is erroneously detected, The position of the guide can be detected.
도 1은 본 발명의 일 실시형태에 있어서의 크레인시스템의 예를 나타내는 사시도이다.
도 2는 동 실시형태에 있어서의 가이드의 예를 나타내는 사시도이다.
도 3은 동 실시형태에 있어서의 거리센서의 주사범위의 예를 나타내는 설명도이다.
도 4는 동 실시형태에 있어서의 이동제어장치의 기능구성의 예를 나타내는 개략블록도이다.
도 5는 동 실시형태에 있어서의 이동제어부가 산출하는, 가이드의 위치의 기준위치로부터의 어긋남의 예를 나타내는 설명도이다.
도 6은 동 실시형태에 있어서, 이동제어장치가 타이어식 문형 크레인의 주행방향을 제어하는 처리순서의 예를 나타내는 플로차트이다.
도 7은 동 실시형태에 있어서, 노면(RS)으로부터 오목하게 마련된 가이드의 예를 나타내는 사시도이다.
도 8은 동 실시형태에 있어서의, 높이가 다른 영역을 갖는 가이드의 예를 나타내는 설명도이다.
도 9는 동 실시형태의 거리센서의 주사범위에 있어서의 가이드의 높이의 예를 나타내는 그래프이다.
도 10은 동 실시형태에 있어서, 타이어식 문형 크레인을 자동정지시키는 경우의, 이동제어장치가 타이어식 문형 크레인의 주행방향을 제어하는 처리순서의 예를 나타내는 플로차트이다.
도 11은 동 실시형태에 있어서의, 높이가 완만하게 변화하는 영역을 갖는 가이드의 예를 나타내는 설명도이다.
도 12는 동 실시형태에 있어서의, 폭이 다른 영역을 갖는 가이드의 예를 나타내는 설명도이다.
도 13은 동 실시형태에 있어서의, 폭이 완만하게 변화하는 영역을 갖는 가이드의 예를 나타내는 설명도이다.
도 14는 동 실시형태에 있어서의, 복수의 가이드가 배치된 예를 나타내는 설명도이다.
도 15는 자석방식에 있어서의 자석검출센서의 배치예를 나타내는 설명도이다.1 is a perspective view showing an example of a crane system according to an embodiment of the present invention.
2 is a perspective view showing an example of a guide in this embodiment.
3 is an explanatory view showing an example of the scanning range of the distance sensor in the embodiment.
4 is a schematic block diagram showing an example of the functional configuration of the movement control apparatus in the embodiment.
Fig. 5 is an explanatory diagram showing an example of shift of the position of the guide from the reference position, which is calculated by the movement control unit in the embodiment; Fig.
6 is a flowchart showing an example of a processing procedure in which the movement control device controls the running direction of a tire-type door-type crane in the embodiment.
Fig. 7 is a perspective view showing an example of a guide recessed from the road surface RS in this embodiment. Fig.
Fig. 8 is an explanatory view showing an example of a guide having regions having different heights in this embodiment. Fig.
9 is a graph showing an example of the height of the guide in the scanning range of the distance sensor of the embodiment.
10 is a flowchart showing an example of a process procedure in which the movement control device controls the running direction of a tire-type door-type crane in the case of automatically stopping a tire-type door-type crane in the embodiment.
Fig. 11 is an explanatory view showing an example of a guide having a region where the height is moderately changed in the embodiment. Fig.
Fig. 12 is an explanatory view showing an example of a guide having regions having different widths in the embodiment. Fig.
Fig. 13 is an explanatory view showing an example of a guide having a region in which the width gradually changes in the present embodiment. Fig.
Fig. 14 is an explanatory view showing an example in which a plurality of guides are arranged in this embodiment. Fig.
15 is an explanatory view showing an example of the arrangement of the magnet detection sensor in the magnet system.
이하, 본 발명의 실시형태를 설명하지만, 이하의 실시형태는 청구범위에 관한 발명을 한정하는 것은 아니다. 또, 실시형태 중에서 설명되고 있는 특징의 조합 모두가 발명의 해결 수단에 필수라고는 한정되지 않는다.Hereinafter, embodiments of the present invention will be described, but the following embodiments do not limit the invention according to the claims. It should be noted that not all combinations of features described in the embodiments are essential to the solution of the invention.
도 1은, 본 발명의 일 실시형태에 있어서의 크레인시스템의 예를 나타내는 사시도이다. 동 도면에 있어서, 크레인시스템(1)은, 타이어식 문형 크레인(100)과, 가이드(200)를 구비한다. 타이어식 문형 크레인(100)은, 크레인본체(110)와, 현수기구(160)를 구비한다. 크레인본체(110)는, 빔(beam)부(111)와, 다리부(121)와, 다리부(122)와, 타이어(131)를 포함하는 주행기구(133)와, 타이어(132)를 포함하는 주행기구(134)와, 전기기기함(140)과, 거리센서(150)를 구비한다. 현수기구(160)는, 트롤리(161)와, 스프레더(162)와, 현수로프(163)와, 권상기(164)를 구비한다.1 is a perspective view showing an example of a crane system according to an embodiment of the present invention. In the figure, the crane system 1 is provided with a tire-type door-
또, 선(L11, L12)은, 각각, 타이어식 문형 크레인(100)의 주행레인의 경계를 나타내고 있다. 선(L11 및 L12)에 끼인 영역(A11)이, 타이어식 문형 크레인(100)의 주행레인으로서 설정되어 있다. 당해 주행레인은, 타이어식 문형 크레인(100)의 주행경로의 예에 해당한다.Lines L11 and L12 indicate the boundaries of the running lane of the tire-type door-
가이드(200)는, 타이어식 문형 크레인(100)의 주행레인의 노면과 다른 높이로, 주행레인이 뻗어 있는 방향을 따라 마련되어 있다.The
도 2는, 가이드(200)의 예를 나타내는 사시도이다. 동 도면에 있어서, 가이드(200)와, 선(L11)이 나타나 있고, 가이드(200)는 선(L11)을 따라 마련되어 있다. 상기와 같이, 선(L11)은 타이어식 문형 크레인(100)의 주행레인의 경계를 나타내고 있고, 가이드(200)는, 타이어식 문형 크레인(100)의 주행레인의 노면(RS) 상에, 주행레인이 뻗어 있는 방향을 따라 마련되어 있다.Fig. 2 is a perspective view showing an example of the
다만, 선(L21)은, 노면(RS)의 높이를 나타내기 위하여 도면 중에 나타나 있다. 타이어식 문형 크레인(100)의 주행레인에 있어서 실제로 선(L21)이 명시되어 있을 필요는 없다.However, the line L21 is shown in the figure to indicate the height of the road surface RS. The line L21 does not need to be actually specified in the running lane of the tire-type door-
도 2에 나타나는 바와 같이, 가이드(200)는 노면(RS)보다 높게 되어 있다. 이로써, 타이어식 문형 크레인(100)은, 노면(RS)과 높이가 다른 위치를 검출함으로써, 가이드(200)의 위치를 검출할 수 있다.As shown in Fig. 2, the
선(L22)은, 타이어식 문형 크레인(100)의 주행방향을 나타내고 있다. 타이어식 문형 크레인(100)은, 가이드(200)의 위치를 검출하고, 가이드(200)를 따라 주행함으로써, 주행레인을 주행할 수 있다. 타이어식 문형 크레인(100)은, 주행레인이 뻗어 있는 방향과 대략 동일한 방향으로 주행한다.Line L22 shows the traveling direction of the tire-type door-
철 등 단단한 소재의 가이드(200)를 이용함으로써, 가이드(200)의 변형이나, 시간이 지남에 따른 가이드(200)의 소실의 가능성을 저감시킬 수 있다. 단, 가이드(200)의 소재는, 가이드(200)의 높이가 노면(RS)의 높이와 다른 것을 검출 가능한 소재이면 되고, 다양한 소재로 할 수 있다.By using the
또, 가이드(200)의 형상은, 도 2에 나타내는 네모난 봉형상에 한정되지 않는다. 가이드(200)의 형상은, 노면(RS)과의 높이의 차이에 의하여 타이어식 문형 크레인(100)의 주행경로의 방향을 나타낼 수 있는 형상이면 되고, 예를 들면, 단면이 둥근 봉형상이어도 된다.The shape of the
또, 가이드(200)의 높이는, 가이드(200)가 노면(RS)과 다른 높이로 되어 있는 것을 검출 가능한 높이면 된다. 예를 들면, 가이드(200)의 높이가 5밀리미터(mm)여도 되고, 10밀리미터여도 된다.The height of the
가이드(200)가 어느 정도의 높이를 갖고 있음으로써, 타이어식 문형 크레인(100)이 가이드(200)를 검출할 수 없을 가능성, 및 타이어식 문형 크레인(100)이 가이드(200)를 오검출할 가능성을 저감시킬 수 있다. 한편, 가이드(200)가 너무 높지 않은 점에서, 타이어식 문형 크레인(100), 다른 차량 또는 사람이, 주행레인에 진입할 때 혹은 주행레인으로부터 퇴출할 때에, 방해가 되기 어렵다. 특히, 가이드(200)의 높이가 낮음으로써, 사람이 가이드(200)에 걸려 넘어질 가능성을 저감시킬 수 있다.It is possible to prevent the tire-type door-
가이드(200)의 폭도, 가이드(200)가 노면(RS)과 다른 높이로 되어 있는 것을 검출 가능한 폭이면 된다. 예를 들면, 가이드(200)의 폭이 5밀리미터여도 되고, 10밀리미터여도 된다.It is sufficient that the width of the
가이드(200)가 어느 정도의 폭을 갖고 있음으로써, 타이어식 문형 크레인(100)이 가이드(200)를 검출할 수 없을 가능성, 및 타이어식 문형 크레인(100)이 가이드(200)를 오검출할 가능성을 저감시킬 수 있다. 한편, 가이드(200)의 폭이 작을수록, 가이드(200)에 필요한 재료의 양을 적게 할 수 있다. 이로써, 가이드(200)의 제조 비용을 저감시킬 수 있다. 또, 가이드(200)의 폭이 작을수록, 가이드(200)를 가볍게 할 수 있어, 가이드(200)의 설치가 비교적 용이해진다.It is possible to prevent the tire-type door-
다만, 도 1 및 도 2에서는, 가이드(200)가 타이어식 문형 크레인(100)의 주행레인 내에 설치되어 있는 경우의 예를 나타내고 있지만, 가이드(200)가 주행레인의 밖에 설치되어 있어도 된다. 혹은, 주행레인의 경계가 명확히 정해져 있지 않아도 된다.1 and 2 show an example in which the
타이어식 문형 크레인(100)은, 가이드(200)에 근거하여 주행방향을 결정하고, 자주(自走)한다.The tire-type door-
타이어식 문형 크레인(100)은, 이동체의 예에 해당한다. 또, 타이어식 문형 크레인(100)의 주행은, 이동체의 이동의 예에 해당하고, 타이어식 문형 크레인(100)의 주행경로는, 이동체의 이동경로의 예에 해당한다. 단, 본 실시형태에 있어서의 이동체는 타이어식 문형 크레인에 한정되지 않고, 이동방향을 제어 가능한, 다양한 기기 또는 운송수단으로 할 수 있다. 예를 들면, 자주하는 자동차나 로봇을, 이동체의 예로서 들 수 있다.The tire-type door-
크레인본체(110)에 있어서, 다리부(121, 122)의 각각이, 대략 연직으로 배치되고, 다리부(121과 122)의 상단 간에 빔부(111)가 마련되어 문형의 프레임을 형성하고 있다. 또, 다리부(121, 122)의 하부에는, 각각, 주행기구(133, 134)가 마련되어 있다. 주행기구(133 및 134)의 타이어(131 및 132)가 회전함으로써, 타이어식 문형 크레인(100)이 주행한다. 타이어식 문형 크레인(100)이 주행할 때, 타이어(131과 132)가 다른 속도로 회전함으로써, 타이어식 문형 크레인(100)의 주행방향이 변화한다.In the crane
단, 본 실시형태에 있어서의 이동체의 이동방향을 변화시키는 방법은, 복수의 타이어의 회전속도를 조정하는 방법에 한정되지 않는다. 예를 들면, 타이어를 구비한 이동체가, 타이어의 방향을 변경함으로써 이동방향을 변화시키도록 해도 된다. 혹은, 이족보행하는 이동체가, 발을 뻗는 방향을 변경함으로써 이동방향을 변화시키도록 해도 된다.However, the method of changing the moving direction of the moving body in the present embodiment is not limited to the method of adjusting the rotational speed of a plurality of tires. For example, the moving body having the tire may change the moving direction by changing the direction of the tire. Alternatively, the moving body that barywalks may change the moving direction by changing the direction in which the feet extend.
또, 다리부(121 및 122)에는, 전기기기함(140)이 설치되어 있다. 전기기기함(140)은, 타이어식 문형 크레인(100)의 주행을 제어하는 이동제어장치, 전기품, 및 발전기 등을 격납하고 있다.The
단, 전기기기함(140)의 설치위치는, 다리부(121이나 122)에 한정되지 않는다. 예를 들면, 전기기기함(140)이, 다리부(121 및 122)에 더하여, 혹은 적어도 어느 한 쪽 대신에, 빔부(111)에 설치되어 있어도 된다.However, the mounting position of the
또, 전기기기함(140)의 수는, 도 1에 나타내는 2개에 한정되지 않으며 1개여도 되고, 3개 이상이어도 된다. 혹은, 타이어식 문형 크레인(100)이 전기기기함(140) 대신에 기기설치용받침을 구비하는 등, 타이어식 문형 크레인(100)이 전기기기함(140)을 구비하고 있지 않아도 된다.The number of
또, 이동제어장치가, 타이어식 문형 크레인(100)의 외부에 마련되어, 타이어식 문형 크레인(100)과 통신을 행하도록 해도 된다.Further, the movement control device may be provided outside the tire-type frame-
또, 주행기구(134)의 옆에, 거리센서(150)가 설치되어 있다. 거리센서(150)는, 하향(즉, 노면측)으로 거리를 측정한다. 이로써, 거리센서(150)는, 노면(RS)의 높이나 가이드(200)의 높이를 측정한다.A
도 3은, 거리센서(150)의 주사범위의 예를 나타내는 설명도이다. 동 도면은, 타이어식 문형 크레인(100)의 주행방향으로부터 거리센서(150)측을 본 모습을 나타내고 있고, 거리센서(150)는, 선(L31)으로 나타나는 레이저광을 출력하는 방향을 변경하여, 타이어식 문형 크레인(100)의 주행방향에 대하여 가로방향으로, 영역(A21)의 범위를 주사한다.3 is an explanatory view showing an example of a scanning range of the
이러한 주사에 의하여, 거리센서(150)는, 주사범위의 각 위치에 대하여, 레이저광을 반사하는 측정대상물까지의 거리를 측정한다. 거리센서(150)가 레이저광을 출력하는 방향에는 노면(RS)이나 가이드(200)가 있고, 거리센서(150)는, 거리센서(150) 자체와 노면(RS)의 거리나, 거리센서(150) 자체와 가이드(200)의 거리를 측정한다.With this scanning, the
그리고, 거리센서(150)는, 거리의 측정결과를 나타내는 거리정보를, 전기기기함(140)에 격납되어 있는 이동제어장치에 출력한다. 거리센서(150)가 출력하는 거리정보는, 타이어식 문형 크레인(100)의 주행경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 거리센서(150)의 사이의 거리를 나타내는 정보이다.Then, the
단, 거리센서(150)는, 레이저광을 이용하는 방식의 센서에 한정되지 않고, 거리센서(150) 자체와 복수의 위치의 각각의 거리를 측정가능한 센서이면 된다. 예를 들면, 거리센서(150)가, 레이저광 대신에 초음파를 출력하여 거리를 측정하도록 해도 된다. 혹은, 거리센서(150)가 하향으로 3차원 화상을 촬상하여 화상해석을 행하는 등, 화상 처리에 의하여 피사체까지의 거리를 측정하도록 해도 된다.However, the
또, 거리센서(150)가 거리의 측정을 행하는 주사방향은, 타이어식 문형 크레인(100)의 주행방향에 대하여 바로 옆에 한정되지 않고, 거리센서(150)에 의한 거리의 측정결과에 근거하여, 가이드(200)와 타이어식 문형 크레인(100)의 상대적인 위치 관계를 검출 가능한 방향이면 된다. 구체적으로는, 거리센서(150)가 거리의 측정을 행하는 주사방향은, 타이어식 문형 크레인(100)의 주행경로가 뻗어 있는 방향과 교차하는 방향이면 된다.The scanning direction in which the
또, 거리센서(150)가 레이저광을 출력하는 경우, 거리센서(150)가 출력하는 레이저광은, 타이어식 문형 크레인(100)의 주행경로가 뻗어 있는 방향과 교차하는 방향으로 주사 가능한 것이면 된다. 예를 들면, 거리센서(150)는 슬릿식의 광학거리계이며, 슬릿으로 좁혀진 레이저광을 출력하도록 해도 된다. 혹은, 거리센서(150)가 점광원으로부터 레이저광을 출력하도록 해도 된다.In the case where the
또, 거리센서(150)에 의한 주사방법은, 레이저광 또는 초음파 등을 출력하는 방향을 변경하는 방법에 한정되지 않는다. 예를 들면, 거리센서(150)가 레이저광을 출력하는 경우, 레이저광을 출력하는 방향을 고정한 채 광원을 수평방향으로 이동시킴으로써 주사를 행하도록 해도 된다.The scanning method by the
또, 거리센서(150)의 설치위치는, 도 1에 나타내는 주행기구(134)의 옆에 한정되지 않고, 가이드(200)를 포함하는 범위를 주사 가능한 위치이면 된다. 예를 들면, 거리센서(150)가, 다리부(122)의 옆에 설치되어 있어도 된다.The mounting position of the
현수기구(160)는, 컨테이너(C)를 현수하여 파지한다. 현수기구(160)가 컨테이너(C)를 현수한 상태에서 타이어식 문형 크레인(100)이 주행함으로써, 타이어식 문형 크레인(100)은 컨테이너(C)를 운반한다.The suspending
트롤리(161)는, 빔부(111)에, 당해 빔부(111)를 따라 이동 가능하게 마련되어 있다. 스프레더(162)는, 컨테이너(C)를 파지한다. 현수로프(163)는, 트롤리(161)로부터 스프레더(162)를 현수한다. 권상기(164)는, 트롤리(161)에 마련되어, 현수로프(163)의 권상 및 권출을 행한다. 권상기(164)가 현수로프(163)를 권상함으로써, 스프레더(162)가 상승한다. 또, 권상기(164)가 현수로프(163)를 권출함으로써, 스프레더(162)가 하강한다.The
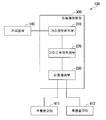
도 4는, 이동제어장치(300)의 기능구성의 예를 나타내는 개략블록도이다. 상기와 같이, 이동제어장치(300)는, 전기기기함(140)에 격납되어 있다. 도 4에 있어서, 이동제어장치(300)는, 거리정보취득부(310)와, 가이드위치특정부(320)와, 이동제어부(330)를 구비한다.4 is a schematic block diagram showing an example of the functional configuration of the
또, 도 4에는, 거리정보취득부(310)에 거리정보를 출력하는 거리센서(150)와, 이동제어부(330)가 회전속도를 제어하는 주행용모터(411 및 412)가 도시되어 있다. 주행용모터(411)는, 타이어(131)를 회전시킨다. 주행용모터(412)는, 타이어(132)를 회전시킨다.4 shows a
상기와 같이, 거리센서(150)는, 주행기구(134)의 옆에 설치되어 있다. 또, 이동제어장치(300)는, 전기기기함(140)에 격납되어 있다. 주행용모터(411, 412)는, 각각, 타이어(131, 132)의 근처에 설치되어 있다.As described above, the
거리정보취득부(310)는, 거리센서(150)가 출력하는 거리정보를 취득한다.The distance information acquisition unit 310 acquires the distance information outputted by the
가이드위치특정부(320)는, 거리정보취득부(310)가 취득한 거리정보에 근거하여, 거리센서(150)의 주사범위에 있어서의 가이드(200)의 위치를 특정한다. 예를 들면, 가이드위치특정부(320)는, 거리센서(150)로부터의 거리의 변화가 소정의 임곗값보다 큰 위치를, 가이드(200)의 모서리부분(edge)의 위치로서 검출하고, 2개의 모서리부분의 중앙을 가이드(200)의 위치로서 특정한다.The guide
이동제어부(330)는, 가이드위치특정부(320)가 특정한 가이드(200)의 위치가 소정의 위치에 가까워지도록, 타이어식 문형 크레인(100)의 주행방향을 제어한다.The
도 5는, 이동제어부(330)가, 타이어식 문형 크레인(100)의 주행방향의 제어를 위하여 산출하는, 가이드(200)의 위치의 기준위치로부터의 어긋남의 예를 나타내는 설명도이다. 동 도면은, 타이어식 문형 크레인(100)의 주행방향으로부터 거리센서(150)의 주사범위에 있어서의 가이드(200)를 본 모습을 나타내고 있고, 가이드(200)와 노면(RS)이 도시되어 있다.5 is an explanatory diagram showing an example of shift of the position of the
도 5의 가로축은 타이어식 문형 크레인(100)의 진행방향에 대하여 가로방향에 있어서의 위치를 나타낸다. 도 5를 마주보고 좌측이 타이어식 문형 크레인(100)에 가까운 측으로 되어 있고, 우측이 타이어식 문형 크레인(100)으로부터 먼 측으로 되어 있다. 따라서, 타이어식 문형 크레인(100)으로부터 멀어질수록, 가로축으로 나타나는 좌푯값(위치의 값)이 커진다.The horizontal axis in FIG. 5 indicates the position in the transverse direction with respect to the traveling direction of the tire-type door-
도 5의 세로축은, 노면(RS)으로부터의 높이를 나타내고 있다. 이 높이는, 거리센서(150)가 출력하는 거리정보로부터 얻어진다.The vertical axis in Fig. 5 indicates the height from the road surface RS. This height is obtained from the distance information outputted by the
또, 범위(A21)는, 거리센서(150)의 주사범위를 나타낸다. 범위(A22)는, 가이드(200)가 위치하는 범위를 나타낸다.The range A21 indicates the scanning range of the
위치(P11)는, 거리센서(150)의 주사범위에 있어서 미리 설정되어 있는 기준위치의 예를 나타낸다. 도 5의 예에서는, 거리센서(150)의 주사범위(범위(A21))의 중앙이 기준위치(위치(P11))로서 설정되어 있다. 이 기준위치는, 이동제어부(330)의 제어에 있어서의 소정의 위치의 예에 해당한다.The position P11 shows an example of a reference position set in advance in the scanning range of the
위치(P12)는, 가이드위치특정부(320)가 특정하는 가이드(200)의 위치의 예를 나타낸다. 도 5의 예에서는, 가이드위치특정부(320)는, 가이드(200)의 중앙(가이드(200)의 상면의 2개의 모서리부분의 중앙)을 가이드(200)의 위치로서 특정하고 있다.The position P12 shows an example of the position of the
편차(D11)는, 위치(P12)의 좌푯값으로부터 위치(P11)의 좌푯값을 뺀 값이다. 편차(D11)는, 기준위치(위치(P11))에 대한 가이드(200)의 위치(위치(P12))의 어긋남의 방향 및 크기를 나타내고 있다.The deviation D11 is a value obtained by subtracting the left turn indicator of the position P11 from the left turn indicator of the position P12. The deviation D11 indicates the direction and magnitude of the deviation of the position of the guide 200 (position P12) with respect to the reference position (position P11).
이동제어부(330)는, 편차(D11)에 근거하여, 가이드(200)의 위치(위치(P12))가 기준위치(위치(P11))에 근접하도록 제어한다. 구체적으로는, 편차(D11)의 값이 0보다 큰 경우, 가이드(200)는, 타이어식 문형 크레인(100)에서 보아 기준위치보다 먼 위치에 있다. 따라서, 이동제어부(330)는, 타이어식 문형 크레인(100)이 가이드(200)에 가까워지도록 타이어식 문형 크레인(100)의 주행방향을 제어한다. 한편, 편차(D11)의 값이 0보다 작은 경우, 가이드(200)는, 타이어식 문형 크레인(100)에서 보아 기준위치보다 가까운 위치에 있다. 따라서, 이동제어부(330)는, 타이어식 문형 크레인(100)이 가이드(200)로부터 멀어지도록 타이어식 문형 크레인(100)의 주행방향을 제어한다.The
이동제어부(330)는, 주행용모터(411 및 412)의 회전속도의 제어에 의하여, 타이어(131 및 132)의 회전속도를 제어함으로써, 타이어식 문형 크레인(100)의 주행방향을 제어한다. 구체적으로는, 이동제어부(330)는, 가이드(200)로부터 먼 측의 타이어(131)의 회전속도를, 가이드(200)에 가까운 측의 타이어(132)의 회전속도보다 빠르게 함으로써, 타이어식 문형 크레인(100)을 가이드(200)에 가까워지게 한다. 또, 이동제어부(330)는, 가이드(200)로부터 먼 측의 타이어(131)의 회전속도를, 가이드(200)에 가까운 측의 타이어(132)의 회전속도보다 느리게 함으로써, 타이어식 문형 크레인(100)을 가이드(200)로부터 멀어지게 한다.The
다만, 거리센서(150)의 주사범위에 있어서의 기준위치는, 도 5에 나타나는 주사범위의 중앙에 한정되지 않고, 거리센서(150)의 주사범위 내에 있어서의 다양한 위치로 할 수 있다. 또, 가이드위치특정부(320)가 특정하는 가이드(200)의 위치는, 도 5에 나타나는 가이드(200)의 중앙에 한정되지 않는다. 예를 들면, 가이드위치특정부(320)가, 가이드(200)의 타이어식 문형 크레인(100)에 가까운 측의 모서리부분의 위치를, 가이드(200)의 위치로서 특정하도록 해도 된다. 혹은, 가이드위치특정부(320)가, 가이드(200)의 타이어식 문형 크레인(100)으로부터 먼 측의 모서리부분의 위치를, 가이드(200)의 위치로서 특정하도록 해도 된다.However, the reference position in the scanning range of the
혹은, 가이드(200)의 형상이, 단면이 둥근 봉형상인 경우, 가이드위치특정부(320)가, 높이가 가장 높은 위치를 가이드(200)의 위치로서 특정하도록 해도 된다. 높이가 가장 높은 위치는, 거리센서(150)로부터의 거리가 가장 짧은 위치로서 검출할 수 있다.Alternatively, when the shape of the
다음으로, 도 6을 참조하여, 이동제어장치(300)의 동작에 대하여 설명한다.Next, the operation of the
도 6은, 이동제어장치(300)가 타이어식 문형 크레인(100)의 주행방향을 제어하는 처리순서의 예를 나타내는 플로차트이다. 이동제어장치(300)는, 타이어식 문형 크레인(100)이 주행하는 동안, 도 6의 처리를 반복하여 실행한다.6 is a flowchart showing an example of a processing procedure in which the
동 도면의 처리에 있어서, 거리정보취득부(310)는, 거리센서(150)가 출력하는 거리정보를 취득한다(스텝 S101).In the process of this figure, the distance information acquisition section 310 acquires distance information outputted by the distance sensor 150 (step S101).
다음으로, 가이드위치특정부(320)는, 거리정보취득부(310)가 취득한 거리정보에 근거하여, 거리센서(150)의 주사범위에 있어서의 가이드(200)의 위치를 특정한다(스텝 S102).Next, the guide
그리고, 이동제어부(330)는, 가이드위치특정부(320)가 특정한 가이드(200)의 위치에 근거하여, 기준위치에 대한 가이드(200)의 위치 어긋남을 산출한다(스텝 S103).The
다음으로, 이동제어부(330)는, 스텝 S103에서 얻어진 어긋남을 타이어(131과 132)의 회전속도의 차에 반영시키도록, 주행용모터(411, 412) 각각의 회전속도를 설정한다(스텝 S104).Next, the
그리고, 이동제어부(330)는, 스텝 S104에서 설정한 회전속도에 근거하여, 주행용모터(411, 412) 각각의 회전속도를 제어한다(스텝 S105).Then, the
스텝 S105 이후, 도 6의 처리를 종료한다.After step S105, the processing of Fig. 6 is terminated.
이상과 같이, 가이드(200)는, 타이어식 문형 크레인(100)의 주행경로의 노면(RS)과 다른 높이로, 타이어식 문형 크레인(100)의 주행경로가 뻗어 있는 방향을 따라 마련되어 있다. 또, 거리센서(150)는, 타이어식 문형 크레인(100)의 주행경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 거리센서(150) 자체의 사이의 거리를 나타내는 거리정보를 생성하여, 이동제어장치(300)에 출력한다. 이동제어장치(300)에서는, 가이드위치특정부(320)가, 거리센서(150)로부터의 거리정보에 근거하여, 가이드(200)의 위치를 특정한다. 그리고, 이동제어부(330)는, 가이드위치특정부(320)가 특정한 가이드(200)의 위치가 기준위치에 가까워지도록, 타이어식 문형 크레인(100)의 주행방향을 제어한다.As described above, the
이로써, 크레인시스템(1)에서는, 가이드(200)를 검출할 수 없게 될 가능성이나, 가이드(200)의 위치를 오검출할 가능성을 저감시키고, 또한 자석방식의 경우보다 높은 분해능으로 가이드(200)의 위치를 검출할 수 있다.This reduces the likelihood that the
구체적으로는, 가이드위치특정부(320)는, 거리센서(150)로부터 노면(RS), 가이드(200) 각각까지의 거리에 근거하여(즉, 가이드(200)의 높이에 근거하여) 가이드(200)의 위치를 특정한다. 가이드(200)가 오염된 경우, 가이드(200) 상에 먼지 등이 묻은 경우, 및 비나 눈 등의 경우여도, 거리센서(150)로부터 노면(RS)까지의 거리, 거리센서(150)로부터 가이드(200)까지의 거리를 검출 가능할 것으로 생각된다. 이 점에 있어서, 가이드위치특정부(320)가, 가이드(200)를 검출할 수 없게 될 가능성이나, 가이드(200)의 위치를 오검출할 가능성을 저감시킬 수 있다.Specifically, the guide
또, 레이저광을 이용하거나, 혹은 촬상 화상을 해석하는 등, 광학적인 방법으로 거리를 측정하는 방식이나, 초음파를 이용하여 거리를 측정하는 방식의 편이, 자석으로부터의 자력을 자석검출센서로 검출하는 방식보다, 분해능을 높이기 쉽다. 이 점에 있어서, 크레인시스템(1)에서는, 자석방식에 의한 경우보다, 높은 분해능으로 가이드(200)의 위치를 검출할 수 있다. 높은 분해능으로 가이드(200)의 위치를 검출함으로써, 크레인시스템(1)에서는, 타이어식 문형 크레인(100)의 직진성을 높일 수 있다(즉, 타이어식 문형 크레인(100)의 사행(蛇行)을 저감시킬 수 있다).In addition, a method of measuring a distance by an optical method such as using a laser beam or an image of a sensed image, or a method of measuring a distance by using an ultrasonic wave is a method of detecting the magnetic force from the magnet by the magnet detection sensor It is easier to increase the resolution than the method. In this respect, in the crane system 1, the position of the
또, 철 등 단단한 소재의 가이드(200)를 이용함으로써, 가이드(200)의 변형이나, 시간이 지남에 따른 가이드(200)의 소실의 가능성을 저감시킬 수 있다.Further, by using the
다만, 가이드(200)는, 그 높이가 노면(RS)의 높이와 다르면 된다. 특히, 가이드(200)는, 도 1에 나타나는 바와 같이 노면(RS)으로부터 돌출되어 마련되는 것에 한정되지 않고, 노면(RS)으로부터 오목하게 마련되어 있어도 된다.However, the height of the
도 7은, 노면(RS)으로부터 오목하게 마련된 가이드(200)의 예를 나타내는 사시도이다. 동 도면에 있어서, 가이드(200)와, 선(L11)이 나타나 있고, 가이드(200)는 선(L11)을 따라 마련되어 있다. 선(L11)은 타이어식 문형 크레인(100)의 주행레인의 경계를 나타내고 있고, 가이드(200)는, 타이어식 문형 크레인(100)의 주행레인의 노면(RS)으로부터 오목하며, 주행레인이 뻗어 있는 방향을 따라 마련되어 있다.7 is a perspective view showing an example of a
다만, 선(L41)은, 노면(RS)의 높이를 나타내기 위하여 도면 중에 나타나 있다. 타이어식 문형 크레인(100)의 주행레인에 있어서 실제로 선(L41)이 명시되어 있을 필요는 없다.However, the line L41 is shown in the figure to indicate the height of the road surface RS. The line L41 does not need to be actually specified in the running lanes of the tire-type door-
도 7에 나타나는 바와 같이, 가이드(200)는 노면(RS)보다 낮게 되어 있다. 이로써, 타이어식 문형 크레인(100)은, 노면(RS)과 높이가 다른 위치를 검출함으로써, 가이드(200)의 위치를 검출할 수 있다.As shown in Fig. 7, the
또, 가이드(200)가 노면(RS)보다 낮게 되어 있음으로써, 사람이 가이드(200)에 걸려 넘어질 가능성을 저감시킬 수 있는 등, 가이드(200)가 방해가 될 가능성을 저감시킬 수 있다.In addition, since the
선(L22)은, 타이어식 문형 크레인(100)의 주행방향을 나타내고 있다. 도 2의 경우와 마찬가지로, 타이어식 문형 크레인(100)은, 가이드(200)의 위치를 검출하고, 가이드(200)를 따라 주행함으로써, 주행레인을 주행할 수 있다.Line L22 shows the traveling direction of the tire-type door-
다만, 가이드(200)의 형상은, 도 7에 나타내는 네모난 형상에 한정되지 않는다. 가이드(200)의 형상은, 노면(RS)과의 높이의 차이에 의하여 타이어식 문형 크레인(100)의 주행경로의 방향을 나타낼 수 있는 형상이면 되고, 예를 들면, 가이드(200)의 바닥부(홈의 바닥부)가 둥글게 되어 있어도 된다.However, the shape of the
또, 가이드(200)의 깊이는, 가이드(200)가 노면(RS)과 다른 높이로 되어 있는 것을 검출 가능한 깊이면 된다. 예를 들면, 가이드(200)의 깊이가 5밀리미터(mm)여도 되고, 10밀리미터여도 된다.The depth of the
가이드(200)의 폭도, 가이드(200)가 노면(RS)과 다른 높이로 되어 있는 것을 검출 가능한 폭이면 된다. 예를 들면, 가이드(200)의 폭이 5밀리미터여도 되고, 10밀리미터여도 된다.It is sufficient that the width of the
다만, 가이드(200)에 먼지 등의 이물이 들어가는 것을 방지하기 위하여, 가이드(200)에 예를 들면 유리 등 레이저광을 투과시키는 부재를 삽입해 두어도 된다.However, in order to prevent foreign matter such as dust from entering the
다만, 가이드(200)의 강성을 확보하기 위하여, 노면(RS)에 약간 큰 홈을 마련하여, 가이드(200)의 형상의 오목부를 갖는 철판을 끼워 넣도록 해도 된다.However, in order to secure the rigidity of the
다만, 가이드(200)가, 노면(RS)으로부터의 높이가 가이드(200)의 다른 영역과 상이한 영역을 갖고 있어도 된다.However, the height of the
도 8은, 높이가 다른 영역을 갖는 가이드(200)의 예를 나타내는 설명도이다. 동 도면은, 가이드(200)를 가로측에서 본 예를 나타내고 있고, 선(L22)은, 타이어식 문형 크레인(100)의 주행방향을 나타내고 있다.Fig. 8 is an explanatory diagram showing an example of a
또, 가이드(200)의 영역(A201)에서는, 노면(RS)으로부터의 높이가 계단형상으로 변화하고 있으며, 영역(A202)이 가장 높게 되어 있다. 타이어식 문형 크레인(100)은, 가이드(200)의 높이의 변화를 검출함으로써, 주행레인에 있어서의 위치를 검출할 수 있다. 예를 들면, 타이어식 문형 크레인(100)의 주행정지위치에 있어서 가이드(200)의 높이가 변화함으로써, 타이어식 문형 크레인(100)은, 가장 높은 영역(A202)의 위치에서 정지하는 등, 주행정지위치에 도달한 것을 검지하여 자동정지할 수 있다.In the area A201 of the
다만, 가이드(200)가 단계적으로 변화하는 경우의 단수는, 도 8에 나타내는 4단에 한정되지 않고, 1단 이상이면 된다. 즉, 가이드(200)의 높이가 변화하고 있으면, 타이어식 문형 크레인(100)은, 주행레인에 있어서의 위치를 검출할 수 있다.However, the number of stages in the case where the
도 9는, 거리센서(150)의 주사범위에 있어서의 가이드(200)의 높이의 예를 나타내는 그래프이다. 동 도면은, 가이드(200)가 도 8에 나타내는 형상을 갖고, 타이어식 문형 크레인(100)이 일정 속도로 주행하는 경우의 예를 나타내고 있다. 도 9의 가로축은 시각을 나타내고, 세로축은 높이를 나타낸다.9 is a graph showing an example of the height of the
타이어식 문형 크레인(100)은, 시각 T11부터 T14의 사이에, 도 8의 영역(A201)에 대응하는 위치를 통과하고 있다. 이로 인하여, 시각 T11부터 T14의 사이, 가이드(200)의 높이가 단계적으로 변화하고 있다. 또, 타이어식 문형 크레인(100)은, 시각 T12부터 T13의 사이에, 도 8의 영역(A202)에 대응하는 위치를 통과하고 있다. 이로 인하여, 시각 T12부터 T13의 사이, 가이드(200)의 높이가 가장 높게 되어 있다.The tire-type door-
여기에서 말하는 가이드(200)의 영역에 대응하는 위치란, 거리센서(150)의 주사범위에 당해 영역이 포함되는, 타이어식 문형 크레인(100)의 위치이다. 예를 들면, 영역(A201)에 대응하는 위치란, 거리센서(150)의 주사범위에 영역(A201)이 포함되는, 타이어식 문형 크레인(100)의 위치이다. 마찬가지로, 영역(A202)에 대응하는 위치란, 거리센서(150)의 주사범위에 영역(A202)이 포함되는, 타이어식 문형 크레인(100)의 위치이다.Here, the position corresponding to the area of the
예를 들면, 영역(A202)에 대응하는 위치에 컨테이너를 적하하는 경우 등, 영역(A202)에 대응하는 위치에서 정지하도록 지령을 받은 경우, 이동제어부(330)가, 거리센서(150)로부터의 거리정보에 근거하여, 영역(A202)에 대응하는 위치에 도달한 것을 검출하여, 타이어식 문형 크레인(100)을 정지시킬 수 있다.For example, when a command is given to stop at a position corresponding to the area A202, such as when a container is dropped at a position corresponding to the area A202, the
또, 주행레인의 단부에 있어서 가이드(200)의 높이가 다른 영역의 높이와 상이해도 된다. 이로써, 이동제어부(330)는, 주행레인의 단부에 도달한 것을 검출할 수 있어, 타이어식 문형 크레인(100)이 주행레인의 단부로부터 벗어나 주행레인의 밖을 주행하는 것을 방지할 수 있다.The height of the
이동제어부(330)는, 예를 들면, 가이드(200)의 높이가 높아진 후에 낮아진 것을 검출하여, 가이드(200)의 높이가 낮아지기 직전의 위치로 되돌아가 정지시킴으로써, 가장 높은 영역인 영역(A202)에 대응하는 위치에서, 타이어식 문형 크레인(100)을 정지시킨다. 구체적으로는, 이동제어부(330)는, 가이드위치특정부(320)가 특정하는 가이드(200)의 위치에 대하여, 거리정보가 나타내는 거리를 독출하여, 당해 거리의 이력을 기억해 둔다. 그리고, 이동제어부(330)는, 독출한 거리가 작아진(가까워진) 후에 커진(멀어진) 것을 검출하여, 타이어식 문형 크레인(100)을, 거리가 커지기 직전의 위치로 되돌아가 정지시킨다.The
혹은, 이동제어부(330)가 거리의 임곗값을 미리 기억해 두고, 거리정보로부터 독출한 거리가, 임곗값보다 작아진 경우에, 정지위치에 도달했다고 판정하도록 해도 된다.Alternatively, the
혹은, 이동제어부(330)가 거리의 임곗값과 타이어식 문형 크레인(100)의 속도를 대응시켜 미리 기억해 두고, 거리정보로부터 독출한 거리에 따라 타이어식 문형 크레인(100)의 속도를 설정하도록 해도 된다. 이 경우, 도 8의 예와 같이 가이드(200)의 높이가 단계적으로 변화함으로써, 이동제어부(330)는, 타이어식 문형 크레인(100)의 속도를 서서히 저하시켜 정지시킬 수 있다.Alternatively, the
도 10은, 타이어식 문형 크레인(100)을 자동정지시키는 경우의, 이동제어장치(300)가 타이어식 문형 크레인(100)의 주행방향을 제어하는 처리순서의 예를 나타내는 플로차트이다. 이동제어장치(300)는, 타이어식 문형 크레인(100)을 정지시키도록 지시를 받고 있는 경우, 도 6의 처리 대신에 도 10의 처리를 반복해서 행한다. 타이어식 문형 크레인(100)을 정지시키는 지시는, 예를 들면, 사람 또는 프로그램이 행한다.10 is a flowchart showing an example of a process sequence in which the
도 10의 스텝 S201, S202는, 각각, 도 6의 스텝 S101, S102와 동일하다.Steps S201 and S202 in Fig. 10 are the same as steps S101 and S102 in Fig. 6, respectively.
스텝 S202 이후, 이동제어부(330)는, 거리정보취득부(310)가 취득한 거리정보로부터, 가이드위치특정부(320)가 특정한 가이드(200)의 위치에 대응하는 거리를 독출한다(스텝 S203).After step S202, the
그리고, 이동제어부(330)는, 스텝 S203에서 얻어진 거리에 근거하여, 타이어식 문형 크레인(100)의 주행속도를 설정한다(스텝 S204). 스텝 S204에 있어서, 이동제어부(330)가, 스텝 S203에서 얻어진 거리에 근거하여, 타이어식 문형 크레인(100)이 정지위치에 도달했는지 여부를 판정하고, 정지위치에 도달했다고 판정한 경우에 타이어식 문형 크레인(100)을 정지시키도록 해도 된다. 혹은, 이동제어부(330)가, 거리와 주행속도를 대응시켜 미리 기억해 두고, 스텝 S203에서 얻어진 거리에 대응하고 있는 속도를 설정하도록 해도 된다.Then, the
스텝 S205부터 S207까지는, 도 6의 스텝 S103부터 S105까지와 동일하다. 스텝 S207 이후, 도 10의 처리를 종료한다.Steps S205 to S207 are the same as steps S103 to S105 in Fig. After step S207, the processing of Fig. 10 is terminated.
다만, 가이드(200)의 높이의 변화는, 도 8의 예와 같은 단계적인 변화에 한정되지 않는다.However, the change in the height of the
도 11은, 높이가 완만하게 변화하는 영역을 갖는 가이드(200)의 예를 나타내는 설명도이다. 동 도면은, 가이드(200)를 가로측에서 본 예를 나타내고 있고, 선(L22)은, 타이어식 문형 크레인(100)의 주행방향을 나타내고 있다.11 is an explanatory view showing an example of a
또, 가이드(200)의 영역(A211)에서는, 노면(RS)으로부터의 높이가 완만하게 변화하고 있고, 위치(P212)에 있어서 가장 높게 되어 있다. 타이어식 문형 크레인(100)은, 가이드(200)의 높이의 변화를 검출함으로써, 주행레인에 있어서의 위치를 검출할 수 있다. 예를 들면, 타이어식 문형 크레인(100)의 주행정지위치에 있어서 가이드(200)의 높이가 변화함으로써, 타이어식 문형 크레인(100)은, 가장 높은 위치(P212)에서 정지하는 등, 주행정지위치에 도달한 것을 검지하여 자동정지할 수 있다.In the area A211 of the
가이드(200)의 높이가 완만하게 변화하는 경우도, 가이드(200)의 높이가 단계적으로 변화하는 경우와 마찬가지로, 이동제어부(330)가, 가이드(200)가 가장 높아지는 위치를 검출하고, 검출한 위치에서 타이어식 문형 크레인(100)을 정지시키도록 해도 된다. 구체적으로는, 이동제어부(330)는, 거리가 작아진 후에 커진 것을 검출하여, 타이어식 문형 크레인(100)을, 거리가 커지기 직전의 위치로 되돌아가 정지시키도록 해도 된다.The
혹은, 이동제어부(330)가 거리의 임곗값을 미리 기억해 두고, 거리정보로부터 독출한 거리가, 임곗값보다 작아진 경우에, 정지위치에 도달했다고 판정하도록 해도 된다.Alternatively, the
혹은, 이동제어부(330)가, 거리의 임곗값과 타이어식 문형 크레인(100)의 속도를 대응시켜 미리 기억해 두고, 거리정보로부터 독출한 거리에 따라 타이어식 문형 크레인(100)의 속도를 설정하도록 해도 된다.Alternatively, the
혹은, 이동제어부(330)가, 거리와 속도의 관계를 나타내는 함수를 미리 기억해 두고, 당해 함수에 근거하여, 거리정보로부터 독출한 거리에 따라 타이어식 문형 크레인(100)의 속도를 설정하도록 해도 된다.Alternatively, the
다만, 가이드(200)가, 높이가 다른 영역 대신에, 혹은 이에 더하여, 폭이 다른 영역을 갖고 있어도 된다.However, the
도 12는, 폭이 다른 영역을 갖는 가이드(200)의 예를 나타내는 설명도이다. 동 도면은, 가이드(200)를 상측에서 본 예를 나타내고 있고, 선(L22)은, 타이어식 문형 크레인(100)의 주행방향을 나타내고 있다.12 is an explanatory diagram showing an example of a
또, 가이드(200)의 영역(A221)에서는, 폭이 계단형상으로 변화하고 있으며, 영역(A222)에 있어서 폭이 가장 넓게 되어 있다. 가이드(200)의 높이가 변화하는 경우와 마찬가지로, 타이어식 문형 크레인(100)은, 가이드(200)의 폭 변화를 검출함으로써, 주행레인에 있어서의 위치를 검출할 수 있다.In the region A221 of the
가이드(200)의 폭으로 주행레인에 있어서의 위치를 나타냄으로써, 가이드(200)의 높이를 높게 할 필요가 없다. 이로써, 가이드(200)가 방해가 될 가능성을 저감시킬 수 있다.It is not necessary to increase the height of the
다만, 가이드위치특정부(320)가, 가이드(200)의 모서리부분의 위치를 가이드(200)의 위치로서 특정하는 경우, 가이드(200)의 폭이 편측만 변화하도록 해도 된다. 구체적으로는, 가이드위치특정부(320)가 위치를 특정하는 모서리부분과 반대측만, 폭이 변화하도록 해도 된다.However, when the guide
다만, 가이드(200)의 폭 변화는, 도 12의 예와 같은 단계적인 변화에 한정되지 않는다.However, the width change of the
도 13은, 폭이 완만하게 변화하는 영역을 갖는 가이드(200)의 예를 나타내는 설명도이다. 동 도면은, 가이드(200)를 상측에서 본 예를 나타내고 있고, 선(L22)은, 타이어식 문형 크레인(100)의 주행방향을 나타내고 있다.Fig. 13 is an explanatory diagram showing an example of a
또, 가이드(200)의 영역(A231)에서는, 폭이 완만하게 변화하고 있고, 위치(P232)에 있어서 가장 넓게 되어 있다. 가이드(200)의 높이의 변화를 검출하는 경우와 마찬가지로, 타이어식 문형 크레인(100)은, 가이드(200)의 폭 변화를 검출함으로써, 주행레인에 있어서의 위치를 검출할 수 있다.In the region A231 of the
다만, 가이드(200)의 개수로, 주행레인에 있어서의 위치를 나타내도록 해도 된다.However, the number of
도 14는, 복수의 가이드(200)가 배치된 예를 나타내는 설명도이다. 동 도면은, 가이드(200)를 상측에서 본 예를 나타내고 있고, 선(L22)은, 타이어식 문형 크레인(100)의 주행방향을 나타내고 있다.14 is an explanatory view showing an example in which a plurality of
동 도면의 예에서는, 주행레인이 복수의 번지로 구획되어 있고, 영역 A31, A32, A33이, 각각, 1번지, 2번지, 3번지에 대응하고 있다. 이와 같이, 주행레인의 위치에 따라 가이드(200)의 개수가 다른 것으로, 이동제어부(330)는, 주행레인에 있어서의 위치를 검출할 수 있다.In the example shown in the figure, the travel lane is divided into a plurality of addresses, and areas A31, A32, and A33 correspond to addresses 1, 2, and 3, respectively. As described above, the number of the
예를 들면 상기와 같이, 이동제어부(330)는, 주행레인에 있어서의 번지를 검출할 수 있다. 이로써, 이동제어부(330)는, 복수의 정지위치 중 특정한 번지의 정지위치에서 타이어식 문형 크레인(100)을 정지시킬 수 있다.For example, as described above, the
또, 컨테이너의 적하장소 등의 정지위치를 가이드(200)의 개수의 변화로 나타내도록 해도 된다. 이로써, 이동제어부(330)는, 정지위치에 도달한 것을 검출할 수 있어, 타이어식 문형 크레인(100)을 정지위치에서 정지시킬 수 있다.The stop position of the dropping place or the like of the container may be indicated by a change in the number of
또, 주행레인의 단부에 있어서 가이드(200)의 개수가 변화하도록 해도 된다. 이로써, 이동제어부(330)는, 주행레인의 단부에 도달한 것을 검출할 수 있어, 타이어식 문형 크레인(100)이 주행레인의 단부로부터 벗어나 주행레인의 밖을 주행하는 것을 방지할 수 있다.The number of
이상과 같이, 이동제어부(330)는, 가이드(200)의 높이, 폭, 및 개수 중 적어도 어느 하나에 근거하여, 타이어식 문형 크레인(100)의 주행속도를 제어한다.As described above, the
이로써, 이동제어부(330)는, 주행레인이 뻗어 있는 방향에 있어서의 타이어식 문형 크레인(100)의 위치에 근거하여 타이어식 문형 크레인(100)의 속도를 제어할 수 있다. 예를 들면, 이동제어부(330)는, 타이어식 문형 크레인(100)을 정지위치에서 정지시킬 수 있다. 또, 이동제어부(330)는, 타이어식 문형 크레인(100)이 주행레인의 단부로부터 벗어나 주행레인의 밖을 주행하는 것을 방지할 수 있다.Thus, the
또, 이동제어부(330)는, 가이드(200)의 개수에 근거하여, 타이어식 문형 크레인(100)의 주행방향에 있어서의 타이어식 문형 크레인(100)의 위치를 특정하고, 특정한 위치에 근거하여, 타이어식 문형 크레인(100)의 주행속도를 제어한다.The
이로써, 이동제어부(330)는, 주행레인이 뻗어 있는 방향에 있어서의 타이어식 문형 크레인(100)의 위치를 특정하고, 특정한 위치에 근거하여 타이어식 문형 크레인(100)의 속도를 제어할 수 있다. 예를 들면, 이동제어부(330)는, 복수의 정지위치 중 특정한 번지의 정지위치에서 타이어식 문형 크레인(100)을 정지시킬 수 있다.Thereby, the
다만, 이동제어장치(300)의 전부 또는 일부의 기능을 실현하기 위한 프로그램을 컴퓨터독취 가능한 기록매체에 기록하고, 이 기록매체에 기록된 프로그램을 컴퓨터시스템에 읽어 들여, 실행함으로써 각부의 처리를 행해도 된다. 다만, 여기에서 말하는 “컴퓨터시스템”이란, OS나 주변기기 등의 하드웨어를 포함하는 것으로 한다.However, a program for realizing all or part of the functions of the
또, “컴퓨터시스템”은, WWW시스템을 이용하고 있는 경우이면, 홈페이지 제공환경(혹은 표시환경)도 포함하는 것으로 한다.The " computer system " includes a homepage providing environment (or a display environment) if the WWW system is used.
또, “컴퓨터독취 가능한 기록매체”란, 플렉시블디스크, 광자기디스크, ROM, CD-ROM 등의 휴대용매체, 컴퓨터시스템에 내장되는 하드디스크 등의 기억장치를 말한다. 또한 “컴퓨터독취 가능한 기록매체”란, 인터넷 등의 네트워크나 전화회선 등의 통신회선을 통하여 프로그램을 송신하는 경우의 통신선과 같이, 단시간 동안, 동적으로 프로그램을 유지하는 것, 그 경우의 서버나 클라이언트가 되는 컴퓨터시스템 내부의 휘발성메모리와 같이, 일정 시간 프로그램을 유지하고 있는 것도 포함하는 것으로 한다. 또 상기 프로그램은, 상술한 기능의 일부를 실현하기 위한 것이어도 되고, 또한 상술한 기능을 컴퓨터시스템에 이미 기록되어 있는 프로그램과의 조합으로 실현할 수 있는 것이어도 된다.The "computer-readable recording medium" refers to a storage medium such as a flexible disk, a magneto-optical disk, a portable medium such as a ROM and a CD-ROM, or a hard disk built in a computer system. The term " computer-readable recording medium " refers to a medium in which a program is dynamically maintained for a short period of time, such as a communication line when a program is transmitted through a communication line such as a network such as the Internet or a telephone line, Such as a volatile memory in a computer system which is a computer system for storing a program for a predetermined period of time. The program may be one for realizing a part of the functions described above, or may be realized by a combination with the program already recorded in the computer system.
이상, 본 발명의 실시형태에 대하여 도면을 참조하여 상세하게 설명해 왔지만, 구체적인 구성은 이 실시형태에 한정되는 것은 아니고, 이 발명의 요지를 일탈하지 않는 범위의 설계변경 등도 포함된다.Although the embodiments of the present invention have been described in detail with reference to the drawings, the specific structure is not limited to these embodiments, and design modifications and the like that do not depart from the gist of the present invention are also included.
산업상 이용가능성Industrial availability
본 발명은, 거리센서를 구비한 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득부와, 상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득부가 취득한 거리정보에 근거하여 특정하는 가이드위치특정부와, 상기 가이드위치특정부가 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어부를 구비하는 이동제어장치에 관한 것이다.A distance information acquisition unit that acquires distance information indicating a distance between each of the plurality of positions in the direction intersecting with the direction in which the moving path of the moving object having the distance sensor extends and the distance sensor; A guide position specifying unit that specifies a position of a guide provided along a direction in which the moving path extends in a height different from the road surface of the moving path of the moving object based on the distance information acquired by the distance information obtaining unit; And a movement control unit for controlling the moving direction of the moving body so that the position of the specific guide approaches the predetermined position.
상기한 이동제어장치에 의하면, 가이드를 검출할 수 없게 될 가능성이나, 가이드의 위치를 오검출할 가능성을 저감시키고, 또한 자석방식의 경우보다 높은 분해능으로 가이드의 위치를 검출할 수 있다.According to the above-described movement control apparatus, it is possible to reduce the possibility that the guide can not be detected, the possibility of erroneously detecting the position of the guide, and the position of the guide can be detected with higher resolution than in the case of the magnet system.
1 크레인시스템
100 타이어식 문형 크레인
110 크레인본체
111 빔부
121, 122 다리부
131, 132 타이어
140 전기기기함
150 거리센서
160 현수기구
161 트롤리
162 스프레더
163 현수로프
164 권상기
200 가이드
300 이동제어장치
310 거리정보취득부
320 가이드위치특정부
330 이동제어부
411, 412 주행용모터1 Crane system
100 Tire-style crane
110 Crane body
111 beam part
121, 122 legs
131, 132 tires
140 Electric appliance box
150 Distance sensor
160 Suspension mechanism
161 Trolleys
162 spreader
163 suspension rope
164 Traction Machine
200 guides
300 movement control device
310 Distance information acquisition unit
320 guide position specifying part
330 movement control unit
411, 412 Driving motor
Claims (9)
상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득부가 취득한 거리정보에 근거하여 특정하는 가이드위치특정부와,
상기 가이드위치특정부가 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어부를 구비하는 이동제어장치.A distance information acquiring section that acquires distance information indicating a distance between each of the plurality of positions in the direction intersecting the direction in which the moving path of the moving object having the distance sensor extends and the distance sensor,
A guide position specifying unit that specifies a position of a guide provided along a direction in which the movement path extends in a height different from the road surface of the moving path of the moving object based on the distance information obtained by the distance information obtaining unit;
And a movement control unit for controlling the moving direction of the moving body such that the position of the guide is closer to a predetermined position.
상기 이동제어부는, 상기 가이드의 높이, 폭, 및 개수 중 적어도 어느 하나에 근거하여, 상기 이동체의 이동속도를 제어하는, 이동제어장치.The method according to claim 1,
Wherein the movement control unit controls the moving speed of the moving body based on at least one of a height, a width, and a number of the guide.
상기 이동제어부는, 상기 가이드의 개수에 근거하여 상기 이동체의 위치를 특정하고, 특정한 위치에 근거하여, 상기 이동체의 이동속도를 제어하는, 이동제어장치.The method according to claim 1,
Wherein the movement control unit specifies the position of the moving object based on the number of the guides and controls the moving speed of the moving object based on the specified position.
이동체 자체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득부와,
상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득부가 취득한 거리정보에 근거하여 특정하는 가이드위치특정부와,
상기 가이드위치특정부가 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어부를 구비하는 이동체.A distance sensor,
A distance information acquiring unit that acquires distance information indicating a distance between each of the plurality of positions in the direction intersecting the direction in which the moving object itself travels and the distance sensor;
A guide position specifying unit that specifies a position of a guide provided along a direction in which the movement path extends in a height different from the road surface of the moving path of the moving object based on the distance information obtained by the distance information obtaining unit;
And a movement control unit for controlling the moving direction of the moving body such that the position of the specific guide approaches the predetermined position.
거리센서와,
상기 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득부와,
상기 가이드의 위치를, 상기 거리정보취득부가 취득한 거리정보에 근거하여 특정하는 가이드위치특정부와,
상기 가이드위치특정부가 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어부를 구비하는 이동체시스템.A guide provided along a direction in which the moving path extends in a height different from the road surface of the moving path of the moving object,
A distance sensor,
A distance information acquisition unit that acquires distance information indicating a distance between each of the plurality of positions in the direction intersecting the direction in which the moving path of the moving object extends and the distance sensor,
A guide position specifying unit for specifying the position of the guide based on the distance information obtained by the distance information obtaining unit,
And a movement control unit for controlling a moving direction of the moving body such that the position of the guide is closer to a predetermined position.
상기 가이드는, 상기 이동체의 이동경로가 뻗어 있는 방향을 따라, 노면으로부터 돌출되어 마련되는, 이동체시스템.6. The method of claim 5,
Wherein the guide protrudes from the road surface along a direction in which the moving path of the moving object extends.
상기 가이드는, 상기 이동체의 이동경로가 뻗어 있는 방향을 따라, 노면으로부터 오목하게 마련되는, 이동체시스템.6. The method of claim 5,
Wherein the guide is recessed from the road surface along a direction in which the moving path of the moving object extends.
거리센서를 구비한 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득스텝과,
상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득스텝에서 취득한 거리정보에 근거하여 특정하는 가이드위치특정스텝과,
상기 가이드위치특정스텝에서 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어스텝을 포함하는 이동제어방법.A movement control method for a movement control apparatus,
A distance information acquiring step of acquiring distance information indicating a distance between each of the plurality of positions in the direction intersecting with the direction in which the moving path of the moving object having the distance sensor extends,
A guide position specifying step of specifying, based on the distance information acquired in the distance information acquiring step, a position of a guide provided along a direction in which the movement path extends in a height different from the road surface of the moving path of the moving body;
And a movement control step of controlling the moving direction of the moving body so that the position of the specific guide approaches the predetermined position in the guide position specifying step.
거리센서를 구비한 이동체의 이동경로가 뻗어 있는 방향과 교차하는 방향에 있어서의 복수의 위치의 각각과 상기 거리센서의 사이의 거리를 나타내는 거리정보를 취득하는 거리정보취득스텝과,
상기 이동체의 이동경로의 노면과 다른 높이로 상기 이동경로가 뻗어 있는 방향을 따라 마련된 가이드의 위치를, 상기 거리정보취득스텝에서 취득한 거리정보에 근거하여 특정하는 가이드위치특정스텝과,
상기 가이드위치특정스텝에서 특정한 상기 가이드의 위치가 소정의 위치에 가까워지도록, 상기 이동체의 이동방향을 제어하는 이동제어스텝을 실행시키기 위한 프로그램.On the computer,
A distance information acquiring step of acquiring distance information indicating a distance between each of the plurality of positions in the direction intersecting with the direction in which the moving path of the moving object having the distance sensor extends,
A guide position specifying step of specifying, based on the distance information acquired in the distance information acquiring step, a position of a guide provided along a direction in which the movement path extends in a height different from the road surface of the moving path of the moving body;
And a movement control step of controlling the moving direction of the moving body so that the position of the specific guide approaches the predetermined position in the guide position specifying step.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2014/075946 WO2016051476A1 (en) | 2014-09-29 | 2014-09-29 | Movement control device, moving body, moving body system, movement control method, and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170063586A true KR20170063586A (en) | 2017-06-08 |
Family
ID=55629575
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177007588A Ceased KR20170063586A (en) | 2014-09-29 | 2014-09-29 | Movement Control Device, Moving Body, Moving Body System, Movement Control Method, and Program |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JPWO2016051476A1 (en) |
| KR (1) | KR20170063586A (en) |
| CN (1) | CN106794970B (en) |
| WO (1) | WO2016051476A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018207860A1 (en) | 2017-05-23 | 2018-11-29 | Mando Corporation | Intelligent parking assistance system and method for controlling the same |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6864098B2 (en) * | 2017-08-01 | 2021-04-21 | ヤマハ発動機株式会社 | Manned default route self-driving vehicle |
| CN113860181A (en) * | 2021-10-09 | 2021-12-31 | 国网河南省电力公司新安县供电公司 | An electric pipeline laying device |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS527116B2 (en) * | 1972-02-18 | 1977-02-28 | ||
| JPS5245567B2 (en) * | 1974-03-27 | 1977-11-17 | ||
| JPS61118814A (en) * | 1984-11-15 | 1986-06-06 | Daifuku Co Ltd | Optical guiding truck control equipment |
| US5202742A (en) * | 1990-10-03 | 1993-04-13 | Aisin Seiki Kabushiki Kaisha | Laser radar for a vehicle lateral guidance system |
| JPH06348336A (en) * | 1993-06-03 | 1994-12-22 | Toyota Motor Corp | Guide controller for automated guided vehicle |
| JPH07110710A (en) * | 1993-10-13 | 1995-04-25 | Hazama Gumi Ltd | Position and direction detector for running body |
| JPH07223783A (en) * | 1994-02-10 | 1995-08-22 | Hitachi Ltd | Elevator end floor safety device |
| JPH08305439A (en) * | 1995-05-09 | 1996-11-22 | Meidensha Corp | Guiding method for unmanned vehicle |
| JP2895000B2 (en) * | 1996-09-03 | 1999-05-24 | 山口日本電気株式会社 | Guidance control device for automatic guided vehicles |
| JP3262734B2 (en) * | 1997-03-14 | 2002-03-04 | 俊弘 津村 | Cargo handling equipment |
| JPH10283030A (en) * | 1997-03-31 | 1998-10-23 | Hitachi Kiden Kogyo Ltd | Travel equipment for automated guided vehicles |
| JP3295028B2 (en) * | 1997-11-17 | 2002-06-24 | ティー・シー・エム株式会社 | Cargo handling equipment |
| JP2001316052A (en) * | 2000-05-02 | 2001-11-13 | Mitsubishi Electric Corp | Position detecting device for elevator |
| CN101246133B (en) * | 2007-02-16 | 2011-07-20 | 同方威视技术股份有限公司 | Direction correcting device and method, and mobile radiation checkout system |
| CN100497152C (en) * | 2007-04-24 | 2009-06-10 | 青岛港(集团)有限公司 | Deviation rectifying method of tyre type container gantry crane |
| CN201031111Y (en) * | 2007-04-24 | 2008-03-05 | 青岛港(集团)有限公司 | Deviation rectifying equipment of tyre type container gantry crane |
| CN201280386Y (en) * | 2008-09-12 | 2009-07-29 | 天津港联盟国际集装箱码头有限公司 | Automatic deviation correction system of tire crane |
-
2014
- 2014-09-29 WO PCT/JP2014/075946 patent/WO2016051476A1/en active Application Filing
- 2014-09-29 CN CN201480082149.7A patent/CN106794970B/en active Active
- 2014-09-29 KR KR1020177007588A patent/KR20170063586A/en not_active Ceased
- 2014-09-29 JP JP2016551363A patent/JPWO2016051476A1/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018207860A1 (en) | 2017-05-23 | 2018-11-29 | Mando Corporation | Intelligent parking assistance system and method for controlling the same |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106794970B (en) | 2022-09-13 |
| CN106794970A (en) | 2017-05-31 |
| JPWO2016051476A1 (en) | 2017-07-13 |
| WO2016051476A1 (en) | 2016-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9164512B2 (en) | Autonomous moving body and control method thereof | |
| KR101505129B1 (en) | Method for location recognization using system for location recognization and mapping using laser scanner | |
| KR20170063586A (en) | Movement Control Device, Moving Body, Moving Body System, Movement Control Method, and Program | |
| CN110015304A (en) | For seeking and providing the method and system of ground characteristics | |
| WO2014005504A1 (en) | Vehicle-mounted radiation inspection system | |
| US20180229965A1 (en) | Method, a safety control unit and an elevator system for defining absolute position information of an elevator car | |
| CN104634328A (en) | Spatial measurement robot and spatial measurement method thereof | |
| WO2016051861A1 (en) | Obstacle determination device and obstacle determination method | |
| JP5314788B2 (en) | Autonomous mobile device | |
| JP6605691B2 (en) | Tire type portal crane | |
| CN208647730U (en) | Mobile dustbin and navigation system | |
| KR102063841B1 (en) | Apparatus and Method for recognizing to approach tunnel through analysis of sound | |
| KR101237038B1 (en) | Crane control | |
| JP3222663U (en) | Robot sensor placement system | |
| KR20090126570A (en) | Crane control system and method | |
| JP5980709B2 (en) | Suspension detection device and control method thereof | |
| KR101820894B1 (en) | Crane System and Processing Method | |
| CN114347064B (en) | Robot collision detection method and device based on optical flow, computer equipment and storage medium | |
| US12228783B1 (en) | Robotic system obstacle recognition | |
| US20250136149A1 (en) | Systems and methods for enhancing sensing capabilities of an autonomous vehicle | |
| CN205120067U (en) | Driving system and driving position detecting device thereof | |
| KR101568556B1 (en) | Apparatus for automatizing material flow and Method for the same | |
| CN107514974A (en) | A kind of method and system of lathe detection workpiece | |
| KR100935090B1 (en) | Crane vibration displacement measuring device | |
| JPH1149479A (en) | Runout angle detector |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20170320 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20190308 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200617 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20201201 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20200617 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |