KR20170052509A - Method for prediction of a period between two signal edges of a rotational speed sensor signal - Google Patents
Method for prediction of a period between two signal edges of a rotational speed sensor signal Download PDFInfo
- Publication number
- KR20170052509A KR20170052509A KR1020160145850A KR20160145850A KR20170052509A KR 20170052509 A KR20170052509 A KR 20170052509A KR 1020160145850 A KR1020160145850 A KR 1020160145850A KR 20160145850 A KR20160145850 A KR 20160145850A KR 20170052509 A KR20170052509 A KR 20170052509A
- Authority
- KR
- South Korea
- Prior art keywords
- period
- rotational speed
- signal
- signal edges
- edges
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/4802—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage by using electronic circuits in general
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/009—Electrical control of supply of combustible mixture or its constituents using means for generating position or synchronisation signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/26—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using computer, e.g. microprocessor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0097—Electrical control of supply of combustible mixture or its constituents using means for generating speed signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1401—Introducing closed-loop corrections characterised by the control or regulation method
- F02D2041/1412—Introducing closed-loop corrections characterised by the control or regulation method using a predictive controller
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/10—Parameters related to the engine output, e.g. engine torque or engine speed
- F02D2200/101—Engine speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2250/00—Engine control related to specific problems or objectives
- F02D2250/14—Timing of measurement, e.g. synchronisation of measurements to the engine cycle
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
Description
본 발명은, 회전 속도 센서 신호의 2개 신호 에지 사이의 기간을 예측하기 위한 방법, 그리고 이와 같은 방법을 수행하기 위한 계산 유닛 및 컴퓨터 프로그램에 관한 것이다.The present invention relates to a method for predicting a time period between two signal edges of a rotational speed sensor signal, and to a computation unit and a computer program for performing such a method.
자동차 내 연소 엔진은 일반적으로 소위 인코더 휠을 구비하며, 이 인코더 휠에 의해 연소 엔진의 회전 속도 또는 크랭크 샤프트 각도가 검출될 수 있다. 이를 위해, 회전 속도 센서에 의해 인코더 휠이 스캐닝 된다. 인코더 휠이 상호 일정한 각도 간격을 갖는 톱니들을 갖기 때문에, 회전 속도 센서는 교대로 상승 및 하강하는 신호 에지를 갖는 신호를 제공한다. 이와 같은 두 종류의 신호 에지, 소위 능동 신호 에지를 평가함으로써, 회전 속도 정보 또는 크랭크 샤프트 각도 정보가 제공될 수 있다.An in-car combustion engine generally has a so-called encoder wheel, and the rotational speed or crankshaft angle of the combustion engine can be detected by the encoder wheel. To this end, the encoder wheel is scanned by the rotational speed sensor. Since the encoder wheels have toothed gears with a constant angular separation from each other, the rotational speed sensor provides a signal with alternating rising and falling signal edges. By evaluating these two types of signal edges, so-called active signal edges, rotational speed information or crankshaft angle information can be provided.
본 발명에 따라, 독립 특허 청구항들의 특징들을 갖는, 회전 속도 센서 신호의 두 신호 에지 사이의 기간을 예측하기 위한 방법, 그리고 이와 같은 방법을 수행하기 위한 계산 유닛 및 컴퓨터 프로그램이 제안된다. 바람직한 실시예들은 종속 청구항들 및 이하의 상세한 설명의 대상이다.In accordance with the present invention, a method for predicting a time period between two signal edges of a rotational speed sensor signal, having the features of the independent patent claims, and a computation unit and a computer program for performing such a method are proposed. The preferred embodiments are subject of the dependent claims and the following detailed description.
청구항 1에 따른 특징들을 갖는 본 발명에 따른 방법은, 회전 속도 센서의 일 신호의 2개의 연속하는 능동 신호 에지 중 적어도 하나가 아직 검출되지 않은 상태에서 이들 신호 에지 사이의 제1 기간을 추정하는 데 이용된다.The method according to the invention with the features according to
도입부에서 이미 언급한 바와 같이, 회전 속도 센서 및 인코더 휠에 의해 연소 엔진을 위한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보가 제공될 수 있다. 하지만, 이와 같은 정보는 일반적으로 가장 마지막에 수집된, 다시 말해 가장 마지막에 측정되었거나 평가된 신호 에지까지만 제공될 수 있다. 예를 들어 바로 연속하는 2개의 능동 신호 에지 사이에 특정 개수의 등거리 각도 체크 표시(tick marks)가 부가 삽입됨으로써, 회전 속도 또는 크랭크 샤프트 각도에 대해 능동 신호 에지에 의한 것보다 더 상세한 정보가 제공될 수 있다. 하지만, 가장 마지막에 수집된 능동 신호 에지 이후의 정보를 위해서는, 예를 들어 가장 마지막에 수집된 능동 신호 에지와 아직 검출되지 않은 그 다음 능동 신호 에지 사이의 기간을 알고 있어야 한다.As already mentioned at the introduction, rotational speed information and / or crankshaft angle information for the combustion engine may be provided by the rotational speed sensor and the encoder wheel. However, such information is generally only available to the last collected, ie, the last measured or evaluated signal edge. For example, a certain number of equidistant angular tick marks are inserted between two consecutive active signal edges to provide more detailed information about the rotational speed or crankshaft angle than by the active signal edge . However, for information after the last collected active signal edge, for example, it is necessary to know the period between the last active signal edge and the next active signal edge that has not yet been detected.
도입부에서 이미 언급한 바와 같이, 회전 속도 센서는, 연소 엔진의 크랭크 샤프트에 고정 장착될 수 있고, 연소 엔진의 회전 시 상기 회전 속도 센서 근처를 지나는 인코더 휠의 톱니들과 연관되는 일련의 상승 및 하강 신호 에지를 제공한다. 일반적으로는, 하강 에지만 또는 상승 에지만 관찰되며, 이 경우 이들 에지를 능동 신호 에지라고 한다. 이와 같은 에지의 발생은 관련 인코더 휠 톱니들의 위치와 연관된다. 또한, 에지들 사이에서도 세분화된 각도 정보 또는 회전 속도 정보를 얻기 위하여, 2개의 능동 신호 에지 사이에 미리 결정된 개수의 각도 체크 표시를 계속해서 계수하는 각도 계수기가 구현될 수 있다. 2개의 능동 신호 에지 사이의 간격은 이하에서 "증분" 또는 "기간"이라고도 지칭된다. 이때, 각도 체크 표시의 발생 빈도수는, 후속 능동 신호 에지의 시점에 비로소 정확하게 공지될 증분 지속 시간 또는 기간에 의해 분할된 각도 체크 표시의 개수에 상응한다. 상기 빈도수는 후속 증분을 위한 각각의 새로운 신호 에지로써 새로 세팅되기 때문에, 후속하는 신호 에지가 도달할 때까지의 시간이 가급적 정확하게 예측될 수 있다면 바람직할 것이다. 이 경우에는, 가장 오래된 값이 새로운 값으로 다시 덮어쓰기(overwrite)될 때까지, 과거에 수집된 기간들의 히스토리를 소정의 시간 간격에 걸쳐 저장하는 크랭크 샤프트 신호 메모리에 액세스할 수 있다. 상기 기록된 범위 내에는, 연소 주기별로 반복되는 특정의 특징적인 토크 변이(moment variation), 예를 들어 실린더 내에서 공기 또는 공기 연료 혼합물의 압축 시 압축 패턴이 포함되어 있으며, 이와 같은 토크 변이는 기간 예측의 품질 개선을 위해서 고려될 수 있다.As already mentioned in the introduction, the rotational speed sensor can be fixedly mounted on the crankshaft of the combustion engine and can include a series of upward and downward movements associated with the teeth of the encoder wheel passing near the rotational speed sensor upon rotation of the combustion engine Signal edge. In general, only a falling edge or a rising edge is observed, in which case these edges are referred to as active signal edges. The occurrence of such an edge is related to the position of the associated encoder wheel teeth. An angular counter can also be implemented that continuously counts a predetermined number of angular check indications between the two active signal edges to obtain subdivided angular information or rotational velocity information between the edges. The spacing between the two active signal edges is also referred to below as "incremental" or "duration ". At this time, the frequency of occurrence of the angle check marks corresponds to the number of angle check marks divided by the increment duration or duration to be accurately known only at the time of the next active signal edge. Since the frequency is newly set as each new signal edge for subsequent increments, it would be desirable if the time until the next signal edge arrives can be predicted as accurately as possible. In this case, a crankshaft signal memory may be accessed that stores a history of past collected periods over a predetermined time interval, until the oldest value is overwritten with the new value again. Within the recorded range there is included a specific characteristic torque variation repeated for each combustion cycle, for example, a compression pattern upon compression of air or air-fuel mixture in the cylinder, Can be considered for improving the quality of prediction.
상기와 같은 기간을 예측하는 의미에서의 추정을 위해, 이제 연소 엔진의 상이한 실린더들 또는 연소 주기들 사이의 일련의 톱니 시간(기간)이 높은 유사성을 갖는 상황이 유용하게 이용될 수 있음으로써, 이들 톱니 시간(기간)은 선형 리스케일링(linear rescaling)에 의해 상호 맵핑될 수 있다.For estimation in the sense of predicting such a period, it is now advantageous to use situations in which a series of sawtooth periods (periods) between different cylinders or combustion periods of the combustion engine have high similarities, The sawtooth period (period) can be mutually mapped by linear rescaling.
따라서, 다가올 기간(Δti)의 경우, 예를 들어 바로 이전의 기간(Δti -1), 및 하나의 실린더 간격 또는 하나의 연소 주기만큼 뒤에 있는 관련 기준 기간들(Δti -m 및 Δti -m- 1)을 토대로, 바로 후속하는 기준 기간들의 비를 이용하여, 추정값이 지시된다. 따라서, 하기의 식이 얻어진다.Thus, in the case of the upcoming period? T i , for example, the immediately preceding period? T i -1 , and the associated reference periods? T i -m and? T i -m- 1 ), an estimated value is indicated, using the ratio of immediately subsequent reference periods. Therefore, the following expression is obtained.

상기 식에서 m은 실린더들 사이의 톱니 간격 또는 일 연소 주기 동안의 톱니 간격에 상응한다. 여기서 실린더 간격은, 연소 엔진의 개별 실린더들의 점화 시점들의 각도 간격을 의미하며, 이 경우 일 연소 주기는 실린더 간격과 실린더 개수의 곱을 형성한다. 예를 들어 4기통 엔진에서, 일 연소 주기가 720°인 경우, 실린더 간격은 180°이며, 이는 다시 크랭크 샤프트의 2회의 완전 회전에 상응한다.Where m corresponds to the tooth spacing between the cylinders or the tooth spacing during one combustion period. Wherein the cylinder spacing means the angular spacing of the ignition points of the individual cylinders of the combustion engine, in which case one combustion period forms the product of the cylinder spacing and the number of cylinders. For example, in a four-cylinder engine, when one combustion period is 720 °, the cylinder spacing is 180 °, which again corresponds to two full rotations of the crankshaft.
하지만, 이 경우에는 과거의, 다시 말해 일 실린더 간격 또는 일 연소 주기만큼 뒤에 있는 기준 기간들에서의 기준 범위 이내의 회전 속도 변동이 항상 향후에 전용될 수는 없다는 문제가 제기된다. 우선적으로 크랭크 샤프트 각도에만 의존할 뿐 회전 속도에는 전혀 의존하지 않는 소위 압축 토크의 경우, 전술한 전용 가능성은 예측 범위와 기준 범위 간의 회전 속도차가 클수록 덜 보장된다.However, in this case, there arises a problem that the rotational speed fluctuation within the reference range in the past, that is, the one-cylinder interval or the reference periods subsequent to the one combustion period, can not always be devoted in the future. In the case of a so-called compression torque which depends only on the crankshaft angle, but not on the rotational speed at all, the above-mentioned possibility of exclusive is less guaranteed as the rotational speed difference between the predicted range and the reference range is larger.
더 나아가서는, 바로 이전의 기간 히스토리만 참조될 수도 있는데, 예를 들면 바로 이전의 2개 기간의 비만 참조될 수 있다. 따라서, 예를 들어 하기의 식이 얻어진다.Further, only the immediately preceding period history may be referred to, for example, only the obesity of the immediately preceding two periods can be referred to. Thus, for example, the following equation is obtained.

이 경우, 선행하는 기간 동안에 존재했던 회전 속도 경향(상승 또는 하강)이 향후에도 속행된다는 점이 전제되어야 한다. 그렇지 않은 경우(예컨대 방향 전환점 근방에서 또는 제1 연소 즈음에 크랭크 샤프트 상에서 진동이 발생하는 경우)에는, 그 다음 기간의 신뢰성 있는 추정이 불가능하다.In this case, it should be premised that the rotational speed tendency (rise or fall) that existed in the preceding period continues in the future. If not (for example, when vibration occurs on the crankshaft in the vicinity of the turning point or on the first combustion cycle), reliable estimation of the next period is impossible.
이제, 제안된 방법에서는, 기준 범위 내에서, 다시 말해 예측 범위 뒤에서는 실린더 간격의 수 배이고, 예측 범위 이내에서는 동일한 각도 의존적 토크[![]()
![]()

가 적용되고, 상기 식에서 J는 연소 엔진의 관성 모멘트이며, 변수 분리법에 따라,Where J is the moment of inertia of the combustion engine, and according to the variable separation method,

가 적용되고, 여기서 ω는 각속도이다. 상기 식을 적분함으로써 하기의 식,Is applied, where? Is the angular velocity. By integrating the above equations,

이 얻어진다..
상기 식을 능동 신호 에지들 또는 기준 신호 에지들에 상응하는 각도로서의 각도(![]()
![]()
![]()
![]()

이 적용되며, 상기 식에서 Δφ는 바로 연속하는 2개의 능동 신호 에지 간의 균일한 각도 간격 또는 인코더 휠의 2개 톱니의 간격이며, Δti는 제1 기간이고, Δti -1은 제2 기간이며, Δti -m은 1 기준 기간이고, Δti -m-1은 제2 기준 기간이다. 각도 간격(Δφ)이 일정하므로, 하기의 식,Where DELTA phi is the uniform angular spacing between two consecutive active signal edges or the spacing of two teeth of the encoder wheel, DELTA ti is the first period, DELTA ti- 1 is the second period, ? T i -m is one reference period, and? T i -m-1 is a second reference period. Since the angular interval DELTA phi is constant,

으로 간소화된다..
즉, 제1 기준 기간(Δti -m)과 제2 기준 기간(Δti -m-1) 간의 차에 상응하는 인코더 휠의 운동 변동을 야기하는 데 필요한 토크 작용이 제1 기간(Δti) 및 제2 기간(Δti-1)에 전용될 수 있다.That is, the first reference period (Δt i -m) with the second reference period torque action is the first time period (Δt i) is required to cause the movement of the encoder wheel variation corresponding to the difference between (Δt i -m-1) And the second period (? T i-1 ).
앞서 언급한 방법에 비해 제안된 방법의 장점은, 예를 들어 회전 속도 증가 또는 회전 속도 감소의 경우, 다시 말해 기준 범위와 예측 범위가 동일한 평균 회전 속도에 놓여 있지 않은 경우에 더 현실적인 예측이 구현될 수 있다는 데 있다.The advantage of the proposed method over the previously mentioned method is that a more realistic prediction can be realized, for example in the case of a rotational speed increase or a rotational speed reduction, that is, when the reference range and the prediction range do not lie at the same average rotational speed It can be.
제안된 방법에서는, 예를 들어 엔진 가속 시, 제시된 변환 시 제1 기준 기간(Δti-m)과 제2 기준 기간(Δti -m-1) 간의 차의 절대값이 감소하며, 다시 말해 하기의 식,In the proposed method, for example, during engine acceleration, the absolute value of the difference between the first reference period (Δt im ) and the second reference period (Δt i -m-1 ) decreases in the proposed transformation, ,
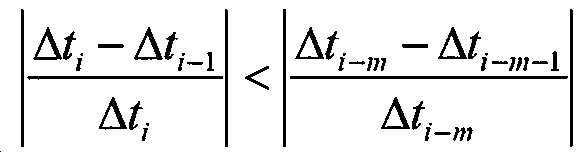
이 적용된다.Is applied.
제안된 방법에서 엔진 감속 시에는, 변환 시 제1 기준 기간(Δti -m)과 제2 기준 기간(Δti-m-1) 간의 차의 절대값이 증가하며, 다시 말해 하기의 식At the time of engine deceleration in the proposed method, the absolute value of the difference between the first reference period (? T i -m ) and the second reference period (? T im-1 ) at the time of conversion increases,
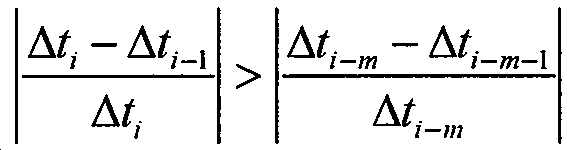
이 적용된다.Is applied.
그와 달리, 앞에서 언급한 방법의 경우에는, 기간들의 상대 비율이 동일하며, 다시 말해 하기의 식,On the other hand, in the case of the above-mentioned method, the relative proportions of the periods are the same, that is,
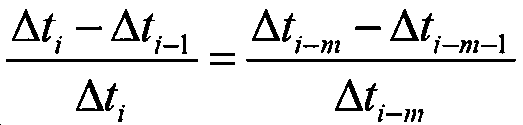
이 적용된다.Is applied.
다시 말해서, 제안된 방법은, 회전 속도 변동이 회전 속도와 무관한 주기적인 토크로 인해 회전 속도에 반비례해서 감소한다는 점을 고려한다. 그와 달리, 앞서 언급한 방법은 상반된 비례 원칙을 잘못 표현하고 있으며, 다시 말해 회전 속도 변동이 회전 속도에 직접 비례한다고 표현한다.In other words, the proposed method considers that the rotational speed variation decreases in inverse proportion to the rotational speed due to the periodic torque irrespective of the rotational speed. On the contrary, the above-mentioned method misrepresents the opposite proportional principle, that is, the rotation speed variation is directly proportional to the rotation speed.
바람직하게는, 제1 기간이 하기의 공식,Preferably, the first period is defined by the following formula:

에 따른 제2 기간으로부터 결정되거나, 상기 공식의 테일러 급수 전개(Taylor series expansion)로부터 산출됨으로써, 토크 작용이 제1 기간 및 제2 기간에 전용된다.Or is calculated from the Taylor series expansion of the formula, so that the torque action is devoted to the first period and the second period.
상기 식을 풀면 제1 기간에 대해 전술한 공식이 얻어진다. 이러한 방식으로, 매우 간단하게 제1 기간이 제2 기간의 함수로서 그리고 제1 및 제2 기준 기간의 함수로서 형성되고 결정된다.Solving this equation yields the formula described above for the first period. In this way, very simply the first period is formed and determined as a function of the second period and as a function of the first and second reference periods.
이 경우, 바람직하게는 테일러 급수 전개로서의 공식이 고려되며, 테일러 급수 전개는 적어도 1차까지, 특히 적어도 2차까지 사용된다. 상기 공식에서는, 예를 들어 제어 장치와 같은 계산 유닛에서 주로 매우 복잡한 계산을 통해서만 산출될 수 있는 근(root)이 발생하기 때문에, 상기 식은 더욱 간단하고 신속한 계산을 위한 테일러 급수 전개에 의해 간소화될 수 있다. 이와 관련하여, 하기의 식,In this case, the formula as Taylor series expansion is preferably considered, and the Taylor series expansion is used up to at least the first order, in particular at least the second order. In the above formula, the equation can be simplified by a Taylor series expansion for simpler and faster computation, because in the calculation unit, for example a control unit, a root can be generated, which can only be calculated by a very complicated calculation have. In this connection,

이 적용되는 것으로 가정되며, 이는 본원에서 매우 우수한 근사에서 충족되었다. 이 경우, 하기의 식,Is assumed to be applied, which has been met at a very good approximation here. In this case,

에 의해, 하기의 식,By the following equation,
으로서의 2차 테일러 급수 전개에서 제1 기간을 구할 수 있다.The first period can be obtained from the second Taylor series expansion as the second period.
대안적으로, 상기 공식에서의 제곱근을 특성 곡선 및/또는 룩업 테이블(look up table)를 고려해서 결정하는 것도 바람직하다. 이와 같은 방식으로도, 계산 유닛에서의 복잡한 근 계산이 회피될 수 있다.Alternatively, it is also desirable to determine the square root of the formula in consideration of the characteristic curve and / or the look-up table. In this way too, complicated calculations in the calculation unit can be avoided.
제1 기간이 아직 검출되지 않은 신호 에지 및 이미 검출되었거나 결정된 신호 에지에 의해 제한되거나, 대안적으로 제1 기간이 아직 검출되지 않은 2개의 신호 에지에 의해 제한되는 것이 바람직하다. 여기서, 검출된 신호 에지는 회전 속도 센서에 의해 검출된 신호 내에 이미 존재하는 신호 에지를 의미하는 한편, 결정된 신호 에지는 추정된, 특히 본원에서 제안된 방법에 따라 추정된 신호 에지를 의미할 수도 있다. 즉, 이미 검출된 신호 에지를 갖는 전술한 제1 대안에서는, 이미 검출된 제2 신호 에지에서부터 추가로 검출될 그 다음 신호 에지까지 경과하는 제1 기간이 추정될 수 있다. 따라서, 추가로 검출될 신호 에지가 놓일 짧은 시간 간격만으로도 매우 정확한 추정 또는 예측이 가능하다. 이 경우, 이미 결정된 신호 에지를 갖는 전술한 제1 대안에서는, 이미 결정된, 즉, 예를 들어 추정된 제2 신호 에지에서부터 추가로 검출될 그 다음 신호 에지까지 경과하는 제1 기간이 추정될 수 있다. 이러한 방식으로, 예를 들어 이 방법을 여러 번 적용함으로써, 훨씬 더 이전의 기간에 대한 예측이 가능해진다. 앞에서 언급한 제2 대안에서는, 예를 들어 훨씬 더 나중의 제1 기간이 직접 추정될 수 있다.It is preferred that the first period is limited by the signal edge which has not yet been detected and by the signal edge which has already been detected or determined, or alternatively by the two signal edges which have not yet detected the first period. Here, the detected signal edge means a signal edge that already exists in the signal detected by the rotational speed sensor, while the determined signal edge may mean an estimated signal edge, in particular according to the method proposed here . That is, in the above-described first alternative with the already detected signal edge, a first period elapsing from the already detected second signal edge to the next signal edge to be detected further can be estimated. Thus, very accurate estimation or prediction is possible with only a short time interval at which the signal edge to be detected is to be detected. In this case, in the above-described first alternative with the signal edge already determined, a first period which has already been determined, i.e. elapsing from the estimated second signal edge to the next signal edge to be detected further, can be estimated . In this way, for example, by applying this method several times, it becomes possible to predict a much earlier period. In the above-mentioned second alternative, for example, a much later later period of time can be directly estimated.
바람직하게, 상기 기간들은 각각 바로 연속하는 2개의 신호 에지에 의해 제한되고, 상기 기준 기간들은 각각 바로 연속하는 2개의 기준 신호 에지에 의해 제한된다. 이러한 방식으로, 2개의 기간 또는 기준 기간 간의 미세한 차이만으로도 매우 정확한 예측이 가능하다.Preferably, the periods are each limited by two successive signal edges, the reference periods being each limited by two successive reference signal edges. In this way, very accurate prediction is possible with only minor differences between the two periods or the reference period.
바람직하게는, 추정된 제1 기간을 고려해서, 제1 기간을 제한하는 2개의 신호 에지 간의 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보가 도출된다. 도입부에서 이미 언급한 바와 같이, 아직 검출되지 않은 신호 에지들의 범위에 대한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보에 대해서는 상응하는 기간의 추정 또는 예측이 필요하다. 제안된 방법으로 상기 기간의 매우 정확한 추정이 가능하기 때문에, 제안된 방법은 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보를 도출하는 데 매우 적합하다.Preferably, in consideration of the estimated first period, rotational speed information and / or crankshaft angle information between two signal edges that limit the first period is derived. As already mentioned in the introduction, estimating or predicting corresponding periods is required for rotational speed information and / or crankshaft angle information for a range of signal edges that have not yet been detected. The proposed method is well suited for deriving rotational speed information and / or crankshaft angle information, since the proposed method allows for very accurate estimation of the period.
각도 시계(angle clock), 각도-시간 환산, 회전 속도 예측을 위한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보가 스타터 제어 및/또는 분사 프로그래밍을 위해 사용되는 것이 바람직하다. 이와 같은 적용예는 특히, 제안된 방법에 의해 제공될 수 있는 매우 정확한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보를 필요로 하는 자동차에 적용되는 예이다. 따라서, 일반적으로 크랭크 샤프트의 정확한 정지 위치를 필요로 하는 스타터 제어를 위해, 전술한 복수의 미래 시점의 기간을 추정하기 위한 가능 방법으로써, 연소 엔진의 코스팅 시 크랭크 샤프트가 정지하게 되는 크랭크 샤프트 각도가 정확하게 결정될 수 있다. 분사 프로그래밍에서는 예를 들어, 특히 향후의 분사 과정들이 상호 매우 짧은 시간 간격을 두고 실시되는 경우에, 목표한 대로 이들 분사 과정의 매우 정밀한 시간적 조정이 수행될 수 있다.It is preferred that angle clock, angle-time conversion, rotational speed information for rotational speed prediction and / or crankshaft angle information are used for starter control and / or injection programming. Such an application is particularly an example applied to an automobile which requires very precise rotational speed information and / or crankshaft angle information which can be provided by the proposed method. Therefore, as a possible method for estimating the periods of the plurality of future time points described above for starter control, which generally requires accurate stopping positions of the crankshaft, a crankshaft angle at which the crankshaft is stopped at the time of costing of the combustion engine Can be accurately determined. In injection programming, for example, very precise temporal adjustment of these injection processes can be carried out as desired, especially if future injection processes are carried out at very short intervals of time.
본 발명에 따른 계산 유닛, 예컨대 자동차의 제어 장치는, 특히 프로그램 기술적으로, 본 발명에 따른 방법을 수행하도록 설계된다.A control unit of a calculation unit, for example an automobile, according to the present invention is designed to perform the method according to the invention, in particular programatically.
이 방법을 컴퓨터 프로그램 형태로 구현하는 것도 바람직한데, 그 이유는 특히 실행 측 제어 장치가 또 다른 작업들을 위해서도 이용됨에 따라 어차피 존재하는 경우에는, 상기 방식이 특히 적은 비용을 야기하기 때문이다. 컴퓨터 프로그램을 제공하기에 적합한 데이터 캐리어는 특히, 예컨대 하드 디스크, 플래시 메모리, EEPROM, DVD 등과 같은 자기 메모리, 광학 메모리 및 전기 메모리이다. 컴퓨터 네트워크(인터넷, 인트라넷 등)를 통한 프로그램의 다운로드도 가능하다.It is also desirable to implement this method in the form of a computer program, since this approach results in particularly low costs, especially if the running-side control device is used for other tasks anyway. Data carriers suitable for providing computer programs are, in particular, magnetic memories such as hard disks, flash memories, EEPROMs, DVDs, optical memories, and electrical memories. It is also possible to download programs via a computer network (Internet, intranet, etc.).
본 발명의 또 다른 장점들 및 실시예들은 상세한 설명 및 첨부된 도면을 참조한다.Further advantages and embodiments of the present invention refer to the detailed description and the attached drawings.
본 발명은, 일 실시예를 토대로 도면에 개략적으로 도시되어 있고, 이하에서 도면을 참조하여 기술된다.The present invention is schematically illustrated in the drawings based on one embodiment, and is described below with reference to the drawings.
도 1a 및 도 1b는 회전 속도 센서를 구비한 인코더 휠을 두 가지 상이한 모습으로 개략적으로 도시한 도면이다.
도 2는 회전 속도 센서의 신호 파형을 도시한 그래프이다.
도 3은 본 발명에 따른 방법의 한 바람직한 실시예에서 사용될 수 있는 것과 같은 기간 및 기준 기간을 도시한 그래프이다.
도 4a 및 도 4b는 본 발명에 따르지 않는 한 방법과 본 발명에 따른 한 방법의 바람직한 일 실시예에서, 추정된 기간 대 실제 기간의 비를 비교한 결과를 도시한 그래프이다.Figs. 1A and 1B schematically show two different views of an encoder wheel with a rotation speed sensor. Fig.
2 is a graph showing a signal waveform of the rotation speed sensor.
3 is a graph depicting a time period and a reference period as can be used in one preferred embodiment of the method according to the present invention.
FIGS. 4A and 4B are graphs showing the results of comparing the ratio of the estimated period to the actual period in a preferred embodiment of the method and the method according to the present invention, unless the present invention is applied.
도 1a에는, 크랭크 샤프트(110)를 구비한 연소 엔진(100)이 개략적으로 도시되어 있다. 크랭크 샤프트(110)에는, 크랭크 샤프트(110)와 일체로 회전하도록 고정 연결된 인코더 휠(120)이 배치되어 있다. 또한, 인코더 휠(120)의 스캐닝을 토대로 해서 신호를 발생시키는 관련 회전 속도 센서(130)도 도시되어 있다. 이 경우, 회전 속도 센서(130)는 예를 들어 적합한 위치에 고정 배치될 수 있다.Figure 1 a schematically shows a
또한, 연소 엔진(110)을 제어하도록 설계된 제어 장치로서 형성된 계산 유닛(140)도 도시되어 있다. 또한, 계산 유닛(140)은 회전 속도 센서(130)에 의해 발생한 신호를 수집할 수 있다.Also shown is a
도 1b에는, 인코더 휠(120) 및 회전 속도 센서(130)의 정면도가 도시되어 있다. 본 도면에는, 인코더 휠의 외측 에지에 형성된 톱니들(121)이 도시되어 있다. 일반적으로 톱니들은 ![]()
![]()
회전 속도 센서(130)는 예를 들어 코일을 가질 수 있는데, 다시 말해 유도 센서(inductive sensor)로서 형성될 수 있다. 이러한 방식으로, 회전 속도 센서(130)의 코일 내에서 신호가 유도되고, 이 신호는 톱니들(121)에 의해 또는 각각 2개의 톱니 사이에 놓인 갭(gap)에 의해 형성된다.The
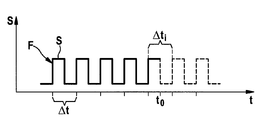
이제, 도 2에는, 인코더 휠을 스캐닝할 때 회전 속도 센서에 의해 제공되는 신호(S)가 도시되어 있다. 이와 관련하여 신호(S)가 시간(t)에 대해 도시되어 있다.Now, in Fig. 2, the signal S provided by the rotational speed sensor when scanning the encoder wheel is shown. In this regard, the signal S is shown for time t.
이때, 신호(S)는, 상승 및 하강하는 신호 에지를 갖는 사각형 파형을 보인다. 이와 같은 상승 및 하강 신호 에지는, 인코더 휠의 톱니들이 회전 속도 센서 근방을 통과하여 회전함으로써 발생한다. 연소 엔진의 회전 속도 또는 크랭크 샤프트 각도를 결정하기 위해, 일반적으로 2개의 연속하는 상승 신호 에지 또는 하강 신호 에지의 시간 간격이 검출된다. 이 경우, 불변의 각도(Δφ)에 의해 회전 속도를 매우 간단히 산출할 수 있다.At this time, the signal S shows a rectangular waveform with rising and falling signal edges. Such rising and falling signal edges are generated by the rotation of the teeth of the encoder wheel through the vicinity of the rotational speed sensor. To determine the rotational speed or crankshaft angle of the combustion engine, the time interval of two successive rising signal edges or falling signal edges is generally detected. In this case, the rotation speed can be calculated very simply by the constant angle DELTA phi.
본 경우, 예를 들어 상승 신호 에지는 능동 신호 에지(F)로서, 다시 말해 회전 속도를 결정하기 위해 사용되는 신호 에지로서 선택된다. 이때, 연속하는 2개의 능동 신호 에지(F)의 시간 간격이 기간 또는 증분 지속 시간(Δt)을 지시한다. 도시된 예에서는, 시점(t0)까지의 신호(S)가 이미 검출되었고, 이는 실선으로 표시되어 있다.In this case, for example, the rising signal edge is selected as the active signal edge (F), that is, the signal edge used to determine the rotational speed. At this time, the time interval of the two consecutive active signal edges F indicates the duration or the incremental duration? T. In the illustrated example, the signal S up to the time point t 0 has already been detected, which is indicated by a solid line.
이제, 도 3에는, 본 발명에 따른 방법의 한 바람직한 실시예에서 사용될 수 있는 바와 같은 기간 및 기준 기간이 도시되어 있다. 이와 관련하여 기간(Δt)이 시간(t)에 대해 도시되어 있다. 여기서 V는, 2개의 상이한 회전 속도 범위에 대해 시간(t)에 걸친 기간(Δt)의 파형을 나타낸다. 좌측 부분은 상응하게 더 짧은 기간을 갖는 더 높은 회전 속도에서의 파형을 보여주고, 우측 부분은 더 낮은 회전 속도 및 상응하게 더 긴 기간에서의 파형을 보여준다.3, there is shown a time period and a reference period as can be used in one preferred embodiment of the method according to the present invention. In this regard, the period? T is shown for time t. Where V represents the waveform of the period DELTA t over time t for two different rotational speed ranges. The left portion shows the waveform at the higher rotational speed correspondingly with the shorter period and the right portion shows the waveform at the lower rotational speed and correspondingly longer period.
또한, 파형(V)을 통해, 하나의 회전 속도 범위 내에서도 기간이 일정하지 않고 변동한다는 사실을 알 수 있다. 그 이유는, 연소 엔진의 일 연소 주기에 걸쳐 회전 속도가 평균적으로 일정해도, 오프셋 실린더가 크랭크 샤프트에 가하는 상이한 토크들로 인해 회전 속도가 변하기 때문이다.Further, it can be seen from the waveform (V) that the period is not constant but fluctuates even within one rotation speed range. The reason is that even if the rotational speed is constant on average over one combustion cycle of the combustion engine, the rotational speed changes due to the different torques that the offset cylinder applies to the crankshaft.
계속해서 파형(V)의 우측 부분에는 제1 기간(Δti) 및 제2 기간(Δti - 1)이 도시되어 있다. 파형(V)의 좌측 부분에는, 제1 기준 기간(Δti -m) 및 제2 기준 기간(Δti-m-1)이 도시되어 있다. 이때, 제1 기간은 예를 들어 도 2에 도시된 제1 기간(Δti), 다시 말해 선행하는 제한 능동 신호 에지가 아직 회전 속도 센서에 의해 검출되지 않은 제1 기간(Δti)일 수 있다.Subsequently, a first period (? T i ) and a second period (? T i - 1 ) are shown on the right side of the waveform (V). In the left part of the waveform V, a first reference period? T i -m and a second reference period? T im-1 are shown. At this time, the first period may be a first period of time (Δt i), in other words the prior limit the active edge of the signal a first time period has not yet been detected by the speed sensor (Δt i) in Fig. 2 e.g. .
이때, 기간 및 기준 기간은, 예를 들어 4기통 엔진에서 일반적으로 180°에 달하는 실린더 간격(![]()
![]()
![]()
![]()
![]()
![]()
따라서, 제1 기간은 전술한 공식들에 따라 제2 기간 그리고 제1 및 제2 기준 기간으로부터 산출되거나 계산된다.Thus, the first period is calculated or calculated from the second period and the first and second reference periods in accordance with the above-described formulas.
도 4a 및 도 4b에는, 본 발명에 따르지 않은 방법과 본 발명에 따른 방법의 한 바람직한 실시예에서, 시간(t)에 걸쳐 추정된 기간 대 실제 기간의 비(Δt/Δt')가 각각 도시되어 있다.4A and 4B, in a preferred embodiment of the method according to the invention and the method not according to the invention, the ratio of the estimated period to the actual period over time (t) is shown respectively have.
이상적인 경우, 상기 비는 일정하게 값 1을 취해야 한다. 이때, 기준 기간으로서는, 예를 들어 계산 유닛 내에 있을 수 있는 회전 속도 센서의 신호 메모리로부터 유래하는 기간들이 참조된다. 이 경우, 기준 기간은 예를 들어 과거의 일 연소 주기이다.In the ideal case, the ratio should take a value of 1 constantly. At this time, as the reference period, for example, the periods derived from the signal memory of the rotational speed sensor, which may be in the calculation unit, are referred to. In this case, the reference period is, for example, one past combustion period.
제안된 방법(도 4b 참조)은, 기준 기간들의 가용 시점에, 본 경우에는 시점(t1)부터 비로소 활성화된다. 도면을 통해 알 수 있는 사실은, 본 발명에 따르지 않은 방법(도 4a 참조)의 경우, 활성화 이후에, 본 경우에는 역시 시점(t1)에서, 이상값 1과의 편차가 본원에 제안된 방법의 경우보다 훨씬 더 크다는 것이다.The proposed method (see FIG. 4B) is activated only at the point of use of the reference periods, in this case from point of view t 1 . It can be seen from the figure that in the case of a method not according to the invention (see FIG. 4a), after activation, in this case again at time t 1 , Is much larger than the case of.
Claims (11)
상기 회전 속도 센서(130)는 연소 엔진(100)의 인코더 휠(120)을 스캐닝함으로써 상기 연소 엔진(100)의 회전 속도를 결정하기 위한 신호(S)를 제공하며,
상기 2개의 연속하는 능동 신호 에지(F) 사이의 제2 기간(Δti - 1)이 결정되고, 상기 두 신호 에지 중 적어도 하나는 제1 기간(Δti)을 제한하지 않으며,
2개의 연속하는 능동 기준 신호 에지 사이에서 제1 기준 기간(Δti -m) 및 제2 기준 기간(Δti-m-1)이 각각 결정되며,
각각의 기준 신호 에지와 상응하는 신호 에지는 각각 일 실린더 간격(
제1 기준 기간(Δti -m)과 제2 기준 기간(Δti -m-1) 간의 차에 상응하는 인코더 휠(120)의 동작 변동을 야기하는 데 필요한 토크 작용이 상기 제1 기간(Δti) 및 상기 제2 기간(Δti - 1)에 전용됨으로써, 상기 제1 기간(Δti)이 상기 제2 기간(Δti -1)을 고려해서 추정되는, 추정 방법.At least one of two consecutive active signal edges F of one signal S of the rotational speed sensor 130 has not yet been detected and a method for estimating a first period? T i between these signal edges As a result,
The rotational speed sensor 130 provides a signal S for determining the rotational speed of the combustion engine 100 by scanning the encoder wheel 120 of the combustion engine 100,
A second period (? T i - 1 ) between the two consecutive active signal edges (F) is determined, and at least one of the two signal edges does not limit the first period (? T i )
A first reference period (? T i -m ) and a second reference period (? T im-1 ) are determined between two successive active reference signal edges,
Each of the reference signal edges and the corresponding signal edge is spaced at one cylinder spacing
A first reference period of time (Δt i -m) with the second reference period (Δt i -m-1) a torque acts required to cause a change operation of the encoder wheel 120 corresponding to the difference of the first period (Δt between i ) and the second period (? t i - 1 ), whereby the first period (? t i ) is estimated taking into account the second period (? t i -1 ).

에 따라 또는 상기 공식의 테일러 급수 전개로부터 산출됨으로써, 토크 작용이 제1 기간(Δti) 및 제2 기간(Δti - 1)에 전용되며, 상기 공식에서 Δti는 제1 기간을 나타내고, Δti -1은 제2 기간을 나타내며, Δti -m은 제1 기준 기간을 나타내고, Δti-m-1은 제2 기준 기간을 나타내는, 추정 방법.The method of claim 1, wherein the first period (? T i ) is calculated from a second period (? T i - 1 )
, The torque action is dedicated to the first period (t i ) and the second period (t i - 1 ), wherein Δt i represents the first period and Δt i is the first period i -1 represents a second period,? t i -m represents a first reference period, and? t im-1 represents a second reference period.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015221634.9 | 2015-11-04 | ||
| DE102015221634.9A DE102015221634A1 (en) | 2015-11-04 | 2015-11-04 | A method of predicting a time duration between two signal edges of a speed sensor signal |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170052509A true KR20170052509A (en) | 2017-05-12 |
Family
ID=58545646
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160145850A KR20170052509A (en) | 2015-11-04 | 2016-11-03 | Method for prediction of a period between two signal edges of a rotational speed sensor signal |
Country Status (3)
| Country | Link |
|---|---|
| KR (1) | KR20170052509A (en) |
| CN (1) | CN107023414A (en) |
| DE (1) | DE102015221634A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200091392A (en) * | 2017-12-05 | 2020-07-30 | 젯트에프 프리드리히스하펜 아게 | Gradient determination for measuring rotation speed |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017222863A1 (en) * | 2017-12-15 | 2019-06-19 | Robert Bosch Gmbh | Method and device for determining a rotational angular position of a crankshaft of an internal combustion engine |
| CN109557332B (en) * | 2018-12-25 | 2020-10-30 | 西安翔迅科技有限责任公司 | Rotation speed signal conversion device based on Taylor algorithm |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004029065A1 (en) * | 2004-06-16 | 2006-01-26 | Siemens Ag | Crankshaft synchronous acquisition of analog signals |
| FR2950388B1 (en) * | 2009-09-23 | 2012-04-20 | Peugeot Citroen Automobiles Sa | METHOD FOR PREDICTING THE ROTATION RPM OF A ROTATION END PHASE ENGINE CRANKSHAFT AND APPLYING THE METHOD TO PREDICTING THE STOP CYLINDER |
| FR2964707B1 (en) * | 2010-09-14 | 2012-09-28 | Peugeot Citroen Automobiles Sa | METHOD OF AUTHORIZING ENGAGEMENT OF A STARTER WITH AN ENGINE AND VEHICLE COMPRISING A CALCULATOR FOR CARRYING OUT SAID METHOD |
| DE102012210301B3 (en) * | 2012-06-19 | 2013-09-05 | Continental Automotive Gmbh | Determining the amount of energy released in a cylinder of an internal combustion engine by means of an evaluation of tooth times of a sensor disc connected to a crankshaft |
-
2015
- 2015-11-04 DE DE102015221634.9A patent/DE102015221634A1/en not_active Withdrawn
-
2016
- 2016-11-03 CN CN201610953776.4A patent/CN107023414A/en active Pending
- 2016-11-03 KR KR1020160145850A patent/KR20170052509A/en unknown
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200091392A (en) * | 2017-12-05 | 2020-07-30 | 젯트에프 프리드리히스하펜 아게 | Gradient determination for measuring rotation speed |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102015221634A1 (en) | 2017-05-04 |
| CN107023414A (en) | 2017-08-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5699253A (en) | Nonlinear dynamic transform for correction of crankshaft acceleration having torsional oscillations | |
| KR102470322B1 (en) | Method and apparatus for detecting reverse rotation of an internal combustion engine | |
| EP1402165B1 (en) | Method to determine tdc in an internal combustion engine | |
| KR20170052509A (en) | Method for prediction of a period between two signal edges of a rotational speed sensor signal | |
| Lin et al. | A new method for measuring engine rotational speed based on the vibration and discrete spectrum correction technique | |
| US7415351B2 (en) | Method and device for detecting an angular position signal for an internal-combustion engine | |
| US8099998B2 (en) | Apparatus and method for estimating stopped engine crank angle | |
| JP2009508035A (en) | How to detect reversal of engine rotation direction | |
| US20060069523A1 (en) | Tire grip sensor and control system using the sensor | |
| US9658082B2 (en) | Method of determining the instantaneous angular position of a crankshaft target optimized for starting the engine | |
| US20070192019A1 (en) | Method for estimating quantity of fuel injected | |
| JP3380244B2 (en) | A device for determining the gradient of the rotational speed | |
| US7194899B1 (en) | Method of estimating crack angles and rotation speeds of engine | |
| JP4533430B2 (en) | Reference signal generating apparatus and method | |
| RU2015114707A (en) | METHOD FOR EVALUATING THE ROTATION SPEED OF THE ENGINE IN THE PRESET POSITION | |
| JP2017106393A (en) | Estimation device, estimation method, estimation program, engine system and moving device | |
| US5386810A (en) | System and method for controlling a solenoid-valve-controlled fuel-metering device, particularly for a diesel gasoline engine | |
| US9184679B2 (en) | Method for predicting the duration of a future time interval | |
| EP2530287A1 (en) | Apparatus and method for estimating a combustion torque of an internal combustion engine | |
| US10234262B2 (en) | Sensor for measuring angular position, and measurement compensation method | |
| Hamedović et al. | IMEP-estimation and in-cylinder pressure reconstruction for multicylinder SI-engine by combined processing of engine speed and one cylinder pressure | |
| US10969285B2 (en) | Engine torque estimating device, engine control system, and engine torque estimation method | |
| CN104481694A (en) | Self-diagnosis method for rotating speed of engine crankshaft | |
| US20060070430A1 (en) | Method for measuring the rotational speed of a crankshaft | |
| US7320308B1 (en) | Method of cylinder pressure sensor data/angle capture for low and high resolution |