KR20140116632A - 사용자의 모션을 감지하는 웨어러블 장치 및 방법 - Google Patents
사용자의 모션을 감지하는 웨어러블 장치 및 방법 Download PDFInfo
- Publication number
- KR20140116632A KR20140116632A KR1020130031422A KR20130031422A KR20140116632A KR 20140116632 A KR20140116632 A KR 20140116632A KR 1020130031422 A KR1020130031422 A KR 1020130031422A KR 20130031422 A KR20130031422 A KR 20130031422A KR 20140116632 A KR20140116632 A KR 20140116632A
- Authority
- KR
- South Korea
- Prior art keywords
- wearable device
- motion
- user
- related information
- detecting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P13/00—Indicating or recording presence, absence, or direction, of movement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0015—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system
- A61B5/0024—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system for multiple sensor units attached to the patient, e.g. using a body or personal area network
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1113—Local tracking of patients, e.g. in a hospital or private home
- A61B5/1114—Tracking parts of the body
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/16—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring distance of clearance between spaced objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/014—Hand-worn input/output arrangements, e.g. data gloves
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/04—Arrangements of multiple sensors of the same type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6813—Specially adapted to be attached to a specific body part
- A61B5/6825—Hand
- A61B5/6826—Finger
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physiology (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- User Interface Of Digital Computer (AREA)
- Position Input By Displaying (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
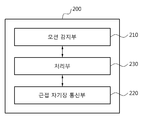
도 2는 일 실시예에 따른 사용자의 모션을 감지하는 웨어러블 장치의 세부적인 구성을 도시한 블럭도이다.
도 3은 일 실시예에 따른 사용자의 모션을 감지하는 웨어러블 장치의 모습을 도시한 도면이다.
도 4는 다른 일 실시예에 따른 사용자의 모션을 감지하는 웨어러블 장치의 모습을 도시한 도면이다.
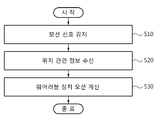
도 5는 일 실시예에 따른 웨어러블 장치에서 사용자의 모션을 감지하는 방법을 도시한 흐름도이다.
도 6은 다른 일 실시예에 따른 웨어러블 장치에서 사용자의 모션을 감지하는 방법을 도시한 흐름도이다.
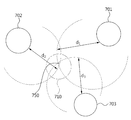
도 7은 일 실시예에 따른 웨어러블 장치가 위치를 추정하는 과정을 도시한 도면이다.
101: 제1 주변장치
102: 제2 주변장치
103: 제n 주변장치
Claims (18)
- 사용자의 제스쳐(gesture)에 따른 모션 신호를 감지하는 모션감지부;
주변 웨어러블 장치로부터 위치관련정보를 수신하는 근접자기장통신부; 및
상기 모션 신호 및 상기 위치관련정보에 기초하여 웨어러블 장치의 모션을 계산하는 처리부
를 포함하는 사용자의 모션을 감지하는 웨어러블 장치. - 제1항에 있어서,
상기 처리부는,
상기 모션 신호를 이용하여 상기 웨어러블 장치의 위치를 추정하는
사용자의 모션을 감지하는 웨어러블 장치. - 제2항에 있어서,
상기 처리부는,
추정된 상기 위치의 오차범위가 임계값 이하가 되도록 상기 위치관련정보에 기초하여 상기 위치를 보정하는,
사용자의 모션을 감지하는 웨어러블 장치. - 제3항에 있어서,
상기 오차범위는,
상기 위치관련정보로부터 계산된 적어도 둘 이상의 주변 웨어러블 장치와의 이격 거리에 따라 추정된 상기 웨어러블 장치의 위치가 중첩되는 공간인,
사용자의 모션을 감지하는 웨어러블 장치. - 제1항에 있어서,
상기 처리부는,
상기 위치관련정보에 포함되는 기준신호의 세기(power level)에 따라 상기 주변 웨어러블 장치와의 이격 거리를 추정하고, 상기 이격 거리 및 상기 위치관련정보에 기초하여 상기 웨어러블 장치의 위치를 계산하는,
사용자의 모션을 감지하는 웨어러블 장치. - 제1항에 있어서,
상기 처리부는,
상기 웨어러블 장치의 위치를 상기 모션 신호 및 상기 위치관련정보에 따라 시계열적으로 추적하여 상기 모션을 감지하는,
사용자의 모션을 감지하는 웨어러블 장치. - 제1항에 있어서,
상기 위치관련정보는,
상기 주변 웨어러블 장치가 추정한 상기 웨어러블 장치와의 이격 거리, 상기 주변 웨어러블 장치의 모션 신호, 상기 주변 웨어러블 장치의 위치 중 적어도 하나
를 포함하는 사용자의 모션을 감지하는 웨어러블 장치. - 제1항에 있어서,
상기 모션감지부는,
가속도 센서, 근전도(EMG) 센서 중 적어도 하나
를 포함하는 사용자의 모션을 감지하는 웨어러블 장치. - 제1항에 있어서,
상기 웨어러블 장치를 사용자의 신체에 적용시킬 수 있는 신체적용부
를 포함하는 사용자의 모션을 감지하는 웨어러블 장치. - 사용자의 제스쳐에 따른 모션 신호를 감지하는 단계;
주변 웨어러블 장치로부터 위치관련정보를 수신하는 단계;
상기 모션 신호 및 상기 위치관련정보에 기초하여 웨어러블 장치의 모션을 계산하는 단계
를 포함하는 웨어러블 장치에서 사용자의 모션을 감지하는 방법. - 제10항에 있어서,
사용자의 제스쳐에 따른 모션 신호를 감지하는 단계는,
상기 모션 신호에 따라 상기 웨어러블 장치의 위치를 추정하는 단계
를 포함하는 웨어러블 장치에서 사용자의 모션을 감지하는 방법. - 제11항에 있어서,
상기 모션 신호 및 상기 위치관련정보에 기초하여 웨어러블 장치의 모션을 계산하는 단계는,
추정된 상기 위치의 오차범위가 임계값 이하가 되도록 상기 위치관련정보에 기초하여 상기 위치를 보정하는 단계
를 포함하는 웨어러블 장치에서 사용자의 모션을 감지하는 방법. - 제12항에 있어서,
상기 추정된 상기 위치의 오차범위가 임계값 이하가 되도록 상기 위치관련정보에 기초하여 상기 위치를 보정하는 단계는,
상기 위치관련정보에 포함된 기준신호의 세기를 검출하는 단계;
상기 세기로부터 상기 주변 웨어러블 장치와의 이격 거리를 추정하는 단계; 및
상기 모션 신호 및 상기 이격 거리에 따라 상기 오차범위를 결정하는 단계
를 포함하는 웨어러블 장치에서 사용자의 모션을 감지하는 방법. - 제10항에 있어서,
상기 모션 신호 및 상기 위치관련정보에 기초하여 웨어러블 장치의 모션을 계산하는 단계는,
상기 위치관련정보에 포함되는 기준신호의 세기를 분석하여 상기 주변 웨어러블 장치와의 이격 거리를 추정하는 단계; 및
상기 이격 거리 및 상기 위치관련정보에 포함된 상기 주변 웨어러블 장치의 위치에 기초하여 상기 웨어러블 장치의 위치를 계산하는 단계
를 포함하는 웨어러블 장치에서 사용자의 모션을 감지하는 방법. - 사용자의 제스쳐에 따라 감지되는 모션 신호로부터 웨어러블 장치의 위치를 추정하는 단계;
적어도 둘 이상의 주변 웨어러블 장치로부터 위치관련정보를 수신하는 단계; 및
추정된 상기 위치 및 상기 위치관련정보에 기초하여 상기 웨어러블 장치의 모션을 계산하는 단계
를 포함하는 웨어러블 장치에서 사용자의 모션을 감지하는 방법. - 제15항에 있어서,
상기 모션 신호 및 상기 위치관련정보에 기초하여 웨어러블 장치의 모션을 계산하는 단계는,
상기 위치관련정보로부터 상기 적어도 둘 이상의 주변 웨어러블 장치와의 이격 거리를 추정하는 단계; 및
추정된 상기 위치로부터, 상기 이격 거리에 따라 추정된 상기 웨어러블 장치의 위치가 중첩되는 공간을 오차범위로 보정하는 단계
를 포함하는 웨어러블 장치에서 사용자의 모션을 감지하는 방법. - 제16항에 있어서,
상기 모션 신호 및 상기 위치관련정보에 기초하여 웨어러블 장치의 모션을 계산하는 단계는,
상기 오차범위가 임계값 이하이면 상기 보정된 위치를 상기 웨어러블 장치의 최종 추정 위치로 결정하는 단계
를 포함하는 웨어러블 장치에서 사용자의 모션을 감지하는 방법. - 제10항 내지 제17항 중 어느 한 항의 방법을 수행하도록 하는 명령어들을 포함하는 하나 이상의 프로그램을 저장한 컴퓨터 판독 가능 저장매체.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130031422A KR20140116632A (ko) | 2013-03-25 | 2013-03-25 | 사용자의 모션을 감지하는 웨어러블 장치 및 방법 |
| US14/198,529 US20140283599A1 (en) | 2013-03-25 | 2014-03-05 | Method and wearable device to sense motion of user |
| EP14160396.9A EP2784631B1 (en) | 2013-03-25 | 2014-03-18 | Method and wearable device to sense motion of user |
| JP2014056441A JP2014186731A (ja) | 2013-03-25 | 2014-03-19 | ユーザのモーションを検出するウェアラブル装置及びその処理方法 |
| CN201410114925.9A CN104076922A (zh) | 2013-03-25 | 2014-03-25 | 感测用户的运动的方法和可穿戴式装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130031422A KR20140116632A (ko) | 2013-03-25 | 2013-03-25 | 사용자의 모션을 감지하는 웨어러블 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20140116632A true KR20140116632A (ko) | 2014-10-06 |
Family
ID=50513664
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020130031422A Ceased KR20140116632A (ko) | 2013-03-25 | 2013-03-25 | 사용자의 모션을 감지하는 웨어러블 장치 및 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20140283599A1 (ko) |
| EP (1) | EP2784631B1 (ko) |
| JP (1) | JP2014186731A (ko) |
| KR (1) | KR20140116632A (ko) |
| CN (1) | CN104076922A (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016093463A1 (ko) * | 2014-12-10 | 2016-06-16 | 주식회사 퓨쳐플레이 | 사용자 인터페이스를 제공하기 위한 방법, 디바이스, 시스템 및 비일시성의 컴퓨터 판독 가능한 기록 매체 |
| US10481698B2 (en) | 2016-06-08 | 2019-11-19 | Samsung Electronics Co., Ltd. | Electronic device and method for activating applications therefor |
| KR102303494B1 (ko) * | 2020-04-06 | 2021-09-16 | 한양대학교 산학협력단 | 웨어러블 자세 측정 장치 및 시스템 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10468528B2 (en) | 2014-04-16 | 2019-11-05 | Taiwan Semiconductor Manufacturing Company, Ltd. | FinFET device with high-k metal gate stack |
| US9178067B1 (en) | 2014-04-25 | 2015-11-03 | Taiwan Semiconductor Manufacturing Company, Ltd. | Structure and method for FinFET device |
| US9721955B2 (en) | 2014-04-25 | 2017-08-01 | Taiwan Semiconductor Manufacturing Company, Ltd. | Structure and method for SRAM FinFET device having an oxide feature |
| US9224736B1 (en) | 2014-06-27 | 2015-12-29 | Taiwan Semicondcutor Manufacturing Company, Ltd. | Structure and method for SRAM FinFET device |
| US9808185B2 (en) * | 2014-09-23 | 2017-11-07 | Fitbit, Inc. | Movement measure generation in a wearable electronic device |
| US10356160B2 (en) | 2014-10-20 | 2019-07-16 | Xiaomi Inc. | Methods and devices for acquiring user information |
| CN104539639A (zh) * | 2014-10-20 | 2015-04-22 | 小米科技有限责任公司 | 用户信息采集方法和装置 |
| US10133900B2 (en) | 2014-10-30 | 2018-11-20 | Philips Lighting Holding B.V. | Controlling the output of contextual information using a computing device |
| KR102463383B1 (ko) * | 2015-02-27 | 2022-11-04 | 삼성전자주식회사 | 생체 신호 측정을 위한 방법 및 이를 위한 착용형 전자 장치 |
| US10359843B2 (en) | 2015-04-01 | 2019-07-23 | Htc Corporation | Electronic apparatus and display control method thereof |
| US20160316263A1 (en) * | 2015-04-21 | 2016-10-27 | Samsung Electronics Co., Ltd. | Display apparatus, and method of operating the display apparatus |
| JP2017049916A (ja) * | 2015-09-04 | 2017-03-09 | 株式会社東芝 | 眼鏡型電子機器、作業管理システムおよび情報管理サーバ |
| US10151606B1 (en) | 2016-02-24 | 2018-12-11 | Ommo Technologies, Inc. | Tracking position and movement using a magnetic field |
| CN106388018A (zh) * | 2016-09-20 | 2017-02-15 | 宏杰内衣股份有限公司 | 一种带人体躯干运动姿态识别和评价功能的运动内衣 |
| CN107997766A (zh) * | 2016-10-31 | 2018-05-08 | 上海芝麻开花医疗科技有限公司 | 步态测试仪 |
| FR3061569A1 (fr) * | 2017-01-04 | 2018-07-06 | Axel Gallian | Procede de pilotage d'aeronef |
| US10276289B1 (en) | 2018-06-01 | 2019-04-30 | Ommo Technologies, Inc. | Rotating a permanent magnet in a position detection system |
| CN113391304B (zh) * | 2021-05-11 | 2023-09-12 | 雷远信息技术有限公司 | 雷达定位方法、定位雷达和定位系统 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4142460B2 (ja) * | 2003-01-31 | 2008-09-03 | オリンパス株式会社 | 運動検出装置 |
| US8684839B2 (en) * | 2004-06-18 | 2014-04-01 | Igt | Control of wager-based game using gesture recognition |
| JP4689480B2 (ja) * | 2006-01-27 | 2011-05-25 | 三菱電機株式会社 | 測位端末及び測位システム |
| US20070249288A1 (en) * | 2006-04-14 | 2007-10-25 | Kamran Moallemi | Distance-based security |
| US8428098B2 (en) * | 2006-07-06 | 2013-04-23 | Qualcomm Incorporated | Geo-locating end-user devices on a communication network |
| US7628074B2 (en) * | 2007-03-15 | 2009-12-08 | Mitsubishi Electric Research Laboratories, Inc. | System and method for motion capture in natural environments |
| US9317110B2 (en) * | 2007-05-29 | 2016-04-19 | Cfph, Llc | Game with hand motion control |
| JP5339304B2 (ja) * | 2008-07-02 | 2013-11-13 | 独立行政法人産業技術総合研究所 | 移動体の測位装置 |
| FR2965060B1 (fr) * | 2010-09-16 | 2012-10-05 | Commissariat Energie Atomique | Procede et dispositif de localisation cooperative d'emetteurs et/ou recepteurs compris par un corps mobile |
| US20120220233A1 (en) * | 2011-02-28 | 2012-08-30 | Qualcomm Incorporated | Ranging with body motion capture |
| KR20130026234A (ko) * | 2011-09-05 | 2013-03-13 | 엘지전자 주식회사 | 영상표시장치와 원격제어장치 및 그 동작 방법 |
-
2013
- 2013-03-25 KR KR1020130031422A patent/KR20140116632A/ko not_active Ceased
-
2014
- 2014-03-05 US US14/198,529 patent/US20140283599A1/en not_active Abandoned
- 2014-03-18 EP EP14160396.9A patent/EP2784631B1/en not_active Not-in-force
- 2014-03-19 JP JP2014056441A patent/JP2014186731A/ja active Pending
- 2014-03-25 CN CN201410114925.9A patent/CN104076922A/zh active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016093463A1 (ko) * | 2014-12-10 | 2016-06-16 | 주식회사 퓨쳐플레이 | 사용자 인터페이스를 제공하기 위한 방법, 디바이스, 시스템 및 비일시성의 컴퓨터 판독 가능한 기록 매체 |
| US10481698B2 (en) | 2016-06-08 | 2019-11-19 | Samsung Electronics Co., Ltd. | Electronic device and method for activating applications therefor |
| KR102303494B1 (ko) * | 2020-04-06 | 2021-09-16 | 한양대학교 산학협력단 | 웨어러블 자세 측정 장치 및 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104076922A (zh) | 2014-10-01 |
| JP2014186731A (ja) | 2014-10-02 |
| EP2784631A1 (en) | 2014-10-01 |
| EP2784631B1 (en) | 2016-05-18 |
| US20140283599A1 (en) | 2014-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20140116632A (ko) | 사용자의 모션을 감지하는 웨어러블 장치 및 방법 | |
| US10572012B2 (en) | Electronic device for performing gestures and methods for determining orientation thereof | |
| CN109891491B (zh) | 控制交互式显示器的方法和装置 | |
| US9529434B2 (en) | Presentation device and method for operating the device | |
| EP2856278B1 (en) | Hardware attitude detection implementation of mobile devices with mems motion sensors | |
| US11237632B2 (en) | Ring device having an antenna, a touch pad, and/or a charging pad to control a computing device based on user motions | |
| CN102262476B (zh) | 传输触觉信息的系统和方法 | |
| US10067610B2 (en) | Method and apparatus for recognizing touch gesture | |
| KR101398946B1 (ko) | 스마트 시계 제어 장치, 방법 및 기록매체 | |
| KR102248404B1 (ko) | 움직임 분석 방법 및 움직임 분석 장치 | |
| US20160162176A1 (en) | Method, Device, System and Non-transitory Computer-readable Recording Medium for Providing User Interface | |
| CA2931364A1 (en) | Computing interface system | |
| KR20100047793A (ko) | 착용형 컴퓨팅 환경 기반의 사용자 인터페이스 장치 및 그 방법 | |
| KR20180127705A (ko) | 전자 장치 및 입력 장치의 입력 처리 방법 | |
| US20160227509A1 (en) | Wideband receiver for position tracking system in combined virutal and physical environment | |
| KR20170033656A (ko) | 전자 장치 및 그의 터치 입력 처리 방법 | |
| US20210318759A1 (en) | Input device to control a computing device with a touch pad having a curved surface configured to sense touch input | |
| US9244567B2 (en) | Electronic apparatus, calibration method and storage medium | |
| KR102400089B1 (ko) | 통신을 제어하는 전자장치 및 동작 방법 | |
| CN110427104A (zh) | 一种手指运动轨迹校准系统及方法 | |
| KR102595257B1 (ko) | 제스처 인식에 기반한 모바일 로봇의 인간추종 및 상호작용 시스템 및 방법 | |
| US10261590B2 (en) | Apparatus and method for recognizing a moving direction of gesture based on differences between sensor output values | |
| KR20170032620A (ko) | 검출 시점 간 시간 차 측정 방법 및 이를 수행하는 장치 | |
| US10551195B2 (en) | Portable device with improved sensor position change detection | |
| KR102448926B1 (ko) | 핑거 프린팅을 이용한 실내 위치 측정 방법 및 이를 이용한 전자 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20130325 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20170111 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20130325 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20171121 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20180130 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20171121 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |