KR20140008018A - 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법 - Google Patents
갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법 Download PDFInfo
- Publication number
- KR20140008018A KR20140008018A KR1020120074896A KR20120074896A KR20140008018A KR 20140008018 A KR20140008018 A KR 20140008018A KR 1020120074896 A KR1020120074896 A KR 1020120074896A KR 20120074896 A KR20120074896 A KR 20120074896A KR 20140008018 A KR20140008018 A KR 20140008018A
- Authority
- KR
- South Korea
- Prior art keywords
- main engine
- gap
- adjustment
- value
- measured value
- Prior art date
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B71/00—Designing vessels; Predicting their performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B85/00—Dismantling or scrapping vessels
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M7/00—Details of attaching or adjusting engine beds, frames, or supporting-legs on foundation or base; Attaching non-moving engine parts, e.g. cylinder blocks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/44—Arrangements for executing specific programs
Landscapes
- Engineering & Computer Science (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Theoretical Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
본 발명은 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법에 관한 것이다.
본 발명은 메인 엔진 사이의 조정은 플랜지 면 사이의 갭과 쌕을 측정하고 측정값을 입력하면 설계 값과 비교하여 메인 엔진의 조정 량을 계산하고 이동 량을 표시하여 메인 엔진을 조정할 수 있는 갭 및 쌕(Gap/Sag) 측정값을 이용한 메인 엔진 조정 방법을 제공한다.
본 발명은 메인 엔진 사이의 조정은 플랜지 면 사이의 갭과 쌕을 측정하고 측정값을 입력하면 설계 값과 비교하여 메인 엔진의 조정 량을 계산하고 이동 량을 표시하여 메인 엔진을 조정할 수 있는 갭 및 쌕(Gap/Sag) 측정값을 이용한 메인 엔진 조정 방법을 제공한다.
Description
본 발명은 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법에 관한 것으로, 특히 메인 엔진 사이의 조정은 플랜지 면 사이의 갭과 쌕을 측정하고 측정값을 입력하면 설계 값과 비교하여 메인 엔진의 조정 량을 계산하고 이동 량을 표시하여 메인 엔진을 조정할 수 있는 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법에 관한 것이다.
일반적으로, 선박의 엔진 구조물은 베드 플레이트, 실린더 프레임, 프레임 박스 등이 메인 스테이 볼트(stay bolt)에 의해 체결 구성되며, 이중 베드 플레이트는 다수의 수직 구조물과 수평판재로 이루어진 용접 일체의 구조물로서 엔진 구동부 및 상부프레임을 지탱하고, 엔진 전체 구조물을 선박의 기초 상에 고정하여 각 부분으로 떨어지는 윤활유를 모아 배출구인 집유공을 통해 배출시키도록 구성된다.
종래 선박의 메인 엔진의 조정은 플랜지면 사이의 갭과 쌕을 측정하고 측정값을 이용하여 작업자의 경험에 의해서 메인 엔진을 조정하였으므로 메인 엔진의 조정 량은 경험이 풍부한 작업자가 수행하여야 했다.
따라서 메인 엔진 조정 시간이 많이 소요되고, 메인 엔진의 조정은 숙련된 작업자가 해야만 되고 메인 엔진의 조정 이력에 대한 관리가 미흡한 문제점이 있었다.
본 발명은 상기와 같은 배경하에서 안출된 것으로, 메인 엔진 사이의 조정은 플랜지 면 사이의 갭과 쌕을 측정하고 측정값을 입력하면 설계 값과 비교하여 메인 엔진의 조정 량을 계산하고 이동 량을 표시하여 메인 엔진을 조정할 수 있는 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법을 제공하는데 그 목적이 있다.
상기 목적을 달성하기 위한 본 발명의 일 실시예에 따른 방법은, 메인 엔진의 플랜지 면 사이의 갭과 쌕(Gap/Sag) 을 측정하고 측정값을 입력하면 설계 값과 비교하여 메인 엔진의 조정 량을 계산하고 이동 량을 표시하여 메인 엔진을 조정할 수 있는 갭 및 쌕 측정값을 이용한 선박의 메인 엔진 조정 방법으로서,
컴퓨터를 통해 선박 메인 엔진 조정 량 계산 프로그램을 구동하고, 상기 프로그램에 메인 엔진의 플랜지면 사이의 설계 값 갭을 입력하고, 플랜지면 사이의 설계 값 쌕을 입력하고, 메인 엔진의 규격을 입력하여 저장하고 상기 측정장치에 의해 측정된 플랜지면 사이의 갭과 쌕의 측정값을 입력하는데, 상/하/좌/우 네 방향의 갭의 측정값을 입력하고 상/하/좌/우 네 방향의 쌕의 측정값을 입력하여 저장하는 단계; 및
상기 선박 메인 엔진 조정 량 계산 프로그램에 의해 메인 엔진의 상/하/좌/우 네 방향의 조정 량을 계산하여 저장하고 상기 설계 값들과 조정 량을 기초로 상기 메인 엔진을 이동하고 조정결과에 대해 이력 관리를 하는데 공사번호, 측정값 및 조정 값을 저장하고 데이터베이스화하여 후속 선에 반영하는 단계를 포함하는 것을 특징으로 하는 갭 및 쌕 측정값을 이용한 선박의 메인 엔진 조정 방법을 제공한다.
본 발명에 의하면 종래의 고 경력 작업자에 의존하던 작업방법을 메인 엔진 조정 량 계산 프로그램을 이용함으로써 메인 엔진의 갭 및 쌕의 설계 값과 실제 플랜지 값을 비교하여 최적의 조정 값을 도출하여 미 숙련자라 할 지라도 용이하게 갭 및 쌕을 조정하고 결과를 저장함으로써 이력 관리를 할 수 있는 효과를 제공할 수 있다.
도 1은 본 발명의 방법을 구현하기 위한 시스템의 구성도를 도시한다.
도 2는 메인 엔진의 플랜지 면 사이의 갭과 쌕의 측정을 위한 개념도를 도시한 도면이다.
도 3은 본 발명의 갭 및 쌕(Gap/Sag) 측정값을 이용한 메인 엔진 조정 방법의 흐름도를 도시한다.
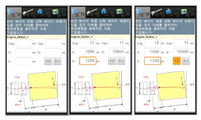
도 4는 본 발명의 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법에 의해 측정된 갭과 쌕을 기초로 메인 엔진 조정 량을 저장하는 과정을 도시한다.
도 2는 메인 엔진의 플랜지 면 사이의 갭과 쌕의 측정을 위한 개념도를 도시한 도면이다.
도 3은 본 발명의 갭 및 쌕(Gap/Sag) 측정값을 이용한 메인 엔진 조정 방법의 흐름도를 도시한다.
도 4는 본 발명의 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법에 의해 측정된 갭과 쌕을 기초로 메인 엔진 조정 량을 저장하는 과정을 도시한다.
이하 본 발명의 일 실시예에 따른 갭 및 쌕 측정값을 이용한 메인 엔진 조정 방법을 첨부 도면을 참조로 하여 상세히 설명하기로 한다. 도면에 있어서 동일 또는 유사의 부분에 대해서는 동일 또는 유사의 도면 부호를 부여하기로 한다.
도 1은 본 발명의 방법을 구현하기 위한 시스템의 구성도를 도시한다.
도면에 도시된 바와 같이 본 발명의 시스템은 설계 값, 플랜지간 갭과 쌕의 측정값 입력하고, 메인 엔진의 네 방향의 조정 량을 계산하고 또한 조정 결과의 이력관리를 위한 태블릿(tablet) PC(100), 및 갭과 쌕의 측정을 위한 측정장치(200)를 포함하고 있다. 상기 태블릿 PC(100)는 이에 한정되지 않으며 스마트 폰, PDA와 같은 같거나 동등의 기능을 발휘하는 것이라면 어느 것이라도 무방할 수 있다.
도 2는 메인 엔진의 플랜지 면 사이의 갭과 쌕의 측정을 위한 개념도를 도시한 도면이다.
a는 플랜지면(300a', 300a”) 사이의 갭(Gap)이고, b는 플랜지면(300ab’, 300b") 사이의 쌕(Sag)이다. 또한, A는 플랜지면(300b')에서 메인 엔진(300) 선미 엣지까지의 거리를 나타내고, B는 메인 엔진(300)의 선미 엣지와 선수 엣지 간의 거리를 나타낸다. 그리고 D는 플랜지(300a)의 직경을 나타낸다.
도면에서는 플랜지(300a)와 플랜지(300b)에서 갭의 설계 값은 상/하: 0, 좌우: 0이고, 쌕의 설계 값은 상/하: 0, 좌우: 0으로 설정된 것으로 가정한다.
위의 도면에서는 상부 쪽의 T에서 갭이 a 만큼 크고, 쌕이 b만큼 크게 측정된다. 따라서 측정된 측정값은 설계 값과 비교하여 메인 엔진의 조정 량을 결정하게 되는데, 설계 값은 갭과 쌕이 각각 0이므로 지지점(10)을 기준으로 하여 상기 갭 a의 값이 0이 되도록 지지점(11)의 회전 조정 값을 계산한다. 메인 엔진(300)의 상하 평행 이동 량은 쌕의 설계 값과 쌕의 측정 값 b 그리고 위에서 갭 조정에 따른 플랜지의 회전에 의한 이동 량을 계산하여 메인 엔진(300)의 평행 이동 량을 구한다.
위와 같은 과정에 의해 메인 엔진(300)의 지지점(10)과 지지점(11)에서의 메인 엔진의 이동 량을 구할 수 있다.
이동의 방향은 지지점(10)과 지지점(11)에서 이동 량이 계산된다.
이동의 방향은 선미 지지점(10)에서 상부방향을 +, 하부 방향을 -로 구분하고, 좌현 방향을 +, 우현 방향을 -로 구분하여 이동 량을 표시하고, 선수 지지점(11)에서 상부 방향을 +, 하부 방향을 -로 구분하고 좌현 방향을 +, 우현 방향을 -로 구분하여 이동 량을 표시한다.
예를 들면, 선수 상/하 이동 량을 -8mm, 좌/우 이동 량을 -5mm, 그리고 선미 상/하 이동 량을 15mm, 좌/우 이동 량을 3mm로 하면, 지지점(10)에서 8mm를 내리고, 우로 5mm 지지점(11)에서 15mm를 이동시키고 좌로 3mm를 이동시킴으로써 갭 및 쌕을 측정하여 조정할 수 있다.
도 3은 본 발명의 갭 및 쌕(Gap/Sag) 측정값을 이용한 메인 엔진 조정 방법의 흐름도를 도시한다.
먼저, 도 1의 태블릿 PC(100)를 통해 선박 메인 엔진 조정 량 계산 프로그램을 구동하고, 이 프로그램에 메인 엔진의 플랜지면 사이의 설계 값 갭을 입력하고, 플랜지면 사이의 설계 값 쌕을 입력하고 그리고 상기 도 2에 도시한 바와 같은 메인 엔진의 규격으로 A, B, 및 D를 입력하여 저장한다(S20). 이어 상기 측정장치(200)에 의해 측정된 플랜지면 사이의 갭과 쌕의 측정값을 입력하는데, 상/하/좌/우 네 방향의 갭의 측정값을 입력하고 상/하/좌/우 네 방향의 쌕의 측정값을 입력하여 저장한다(S40).
다음에, 상기 선박 메인 엔진 조정 량 계산 프로그램에 의해 메인 엔진(300)의 상/하/좌/우 네 방향의 조정 량을 계산하여 저장한다(S60). 조정 량의 계산은 예를 들어 메인 엔진의 상/하/좌/우 네 방향의 설계 값이 모두 10mm일 경우에, 상부 쪽의 측정된 값이 8mm이라면 2mm의 차가 생기므로 2mm만큼 메인 엔진을 상승시킨다. 그리고 조정결과에 대해 이력 관리를 하는데 공사번호, 측정값 및 조정 값 등을 저장하고 데이터베이스화하여 후속 선에 반영한다(S80).
도 4는 본 발명의 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법에 의해 측정된 갭과 쌕을 기초로 메인 엔진 조정 량을 저장하는 과정을 도시한다.
도면에서는 갭은 11mm이고, 쌕은 12mm이며, A는 1000mm이고, B는 1000mm이고, D는 120mm인 예를 도시하고 있다.
이상 설명한 바와 같은 본 발명에 의하면 종래의 고 경력 작업자에 의존하던 작업방법을 메인 엔진 조정 량 프로그램을 이용함으로써 메인 엔진의 갭 및 쌕의 설계 값과 실제 플랜지 값을 비교하여 최적의 조정 값을 도출하여 미숙련자라 할지라도 용이하게 갭 및 쌕을 조정하고 결과를 저장함으로써 이력 관리를 할 수 있는 효과를 제공할 수 있다.
지금까지 본 발명의 일 실시예에 따른 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법을 참조로 하여 설명하였으나 이와 같은 설명은 예시 목적이지 전술한 바로 본 발명을 한정하는 것이 아님을 이해해야 할 것이며, 본 발명의 범위는 전술한 상세한 설명이라기보다는 이하의 부속청구범위에 의해 특정되어 지며, 이러한 본 발명의 특허청구범위는 그 의미 및 범위 그리고 그 등가 개념으로부터 도출되는 모든 변경 또는 변형 형태 또한 본 발명의 범위에 포함되는 것으로 해석되어야 한다.
100: 태블릿 PC 200: 측정장치
Claims (2)
- 메인 엔진의 플랜지 면 사이의 갭과 쌕(Gap/Sag) 을 측정하고 측정값을 입력하면 설계 값과 비교하여 메인 엔진의 조정 량을 계산하고 이동 량을 표시하여 메인 엔진을 조정할 수 있는 갭 및 쌕 측정값을 이용한 메인 엔진 조정 방법으로서,
컴퓨터를 통해 선박 메인 엔진 조정 량 계산 프로그램을 구동하고, 상기 프로그램에 메인 엔진의 플랜지면 사이의 설계 값 갭을 입력하고, 플랜지면 사이의 설계 값 쌕을 입력하고, 메인 엔진의 규격을 입력하여 저장하고 상기 측정장치에 의해 측정된 플랜지면 사이의 갭과 쌕의 측정값을 입력하는데, 상/하/좌/우 네 방향의 갭의 측정값을 입력하고 상/하/좌/우 네 방향의 쌕의 측정값을 입력하여 저장하는 단계; 및
상기 선박 메인 엔진 조정 량 계산 프로그램에 의해 메인 엔진의 상/하/좌/우 네 방향의 조정 량을 계산하여 저장하고 상기 설계 값들과 조정 량을 기초로 상기 메인 엔진을 이동하고 조정결과에 대해 이력 관리를 하는데 공사번호, 측정값 및 조정 값을 저장하고 데이터베이스화하여 후속 선에 반영하는 단계를 포함하는 것을 특징으로 하는 갭 및 쌕 측정값을 이용한 선박의 메인 엔진 조정 방법.
- 청구항 1에 있어서,
상기 조정 량을 기초로 상기 메인 엔진을 선미 지지점에서 상부방향을 +, 하부 방향을 -로 구분하고 좌현 방향을 +, 우현 방향을 -로 구분하여 이동 량을 표시하고, 선수 지지점에서 상부 방향을 +, 하부 방향을 -로 구분하고 좌현 방향을 +, 우현 방향을 -로 구분하여 이동 량을 표시하는 것을 특징으로 하는 갭 및 쌕 측정값을 이용한 선박의 메인 엔진 조정 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120074896A KR20140008018A (ko) | 2012-07-10 | 2012-07-10 | 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120074896A KR20140008018A (ko) | 2012-07-10 | 2012-07-10 | 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20140008018A true KR20140008018A (ko) | 2014-01-21 |
Family
ID=50142041
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120074896A KR20140008018A (ko) | 2012-07-10 | 2012-07-10 | 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20140008018A (ko) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20030029692A (ko) * | 2001-10-08 | 2003-04-16 | 현대자동차주식회사 | 트럭의 프로펠라 샤프트 자동정렬장치 |
| KR20100138361A (ko) * | 2009-06-25 | 2010-12-31 | 한전케이피에스 주식회사 | 다축 연결형 수직펌프의 축 정렬상태 측정 시스템 |
| KR20110056687A (ko) * | 2009-11-23 | 2011-05-31 | 한전케이피에스 주식회사 | Lvdt를 이용한 무선방식의 축정렬 시스템 |
| KR20120045299A (ko) * | 2010-10-29 | 2012-05-09 | 두산엔진주식회사 | 양측 샤프트의 얼라이먼트 측정장치 |
-
2012
- 2012-07-10 KR KR1020120074896A patent/KR20140008018A/ko not_active Application Discontinuation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20030029692A (ko) * | 2001-10-08 | 2003-04-16 | 현대자동차주식회사 | 트럭의 프로펠라 샤프트 자동정렬장치 |
| KR20100138361A (ko) * | 2009-06-25 | 2010-12-31 | 한전케이피에스 주식회사 | 다축 연결형 수직펌프의 축 정렬상태 측정 시스템 |
| KR20110056687A (ko) * | 2009-11-23 | 2011-05-31 | 한전케이피에스 주식회사 | Lvdt를 이용한 무선방식의 축정렬 시스템 |
| KR20120045299A (ko) * | 2010-10-29 | 2012-05-09 | 두산엔진주식회사 | 양측 샤프트의 얼라이먼트 측정장치 |
Non-Patent Citations (2)
| Title |
|---|
| CATERPILLAR-Marine Engines Application and Installation Guide (2000.12.31.) 1부. * |
| Youtube 동영상 - Shaft Alignment with Fixturlaser XA instruction film (2012.01.25.) 1부. * |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110398231B (zh) | 墙面参数的获取方法、装置、计算机设备和存储介质 | |
| KR101408349B1 (ko) | 선박 리세팅 방법 및 리세팅 선박의 좌표 측정 시스템 | |
| CN103925881A (zh) | 板坯连铸机扇形段支撑座的调整就位方法 | |
| CN103195254A (zh) | 混凝土浇筑振捣坯层自动监控方法 | |
| WO2016050095A1 (zh) | 一种渣厚检测及加渣预测方法和系统 | |
| CN204154292U (zh) | 一种陶瓷砖超高精度平整度检测装置 | |
| CN102345390A (zh) | 一种混凝土泵车臂架变形量的补偿方法 | |
| JP6253898B2 (ja) | 注水制御装置及び注水制御方法 | |
| US8094191B2 (en) | System and method for correcting an image | |
| JP2013141709A (ja) | きさげ装置による加工方法 | |
| EP2631365A3 (en) | Debris barrier with function of controlling storage amount of dredge sediment, maintenance management system and method using the same | |
| CN206281459U (zh) | 一种非接触式激光测厚仪 | |
| KR20140008018A (ko) | 갭 및 쌕(Gap/Sag) 측정값을 이용한 선박의 메인 엔진 조정 방법 | |
| CN116989869B (zh) | 一种基于料仓参数分析的仓顶雷达扫描方法 | |
| RU2015106614A (ru) | Способ управления отображением, компьютерная программа, устройство для управления отображением и дисплейная система воспроизведения изображений | |
| WO2020255540A1 (ja) | 地面情報検知方法、地面情報検知システム、地面情報検知プログラム及びプロファイル | |
| CN116623659A (zh) | 一种打桩船打桩监控的方法、装置、电子设备及介质 | |
| CN203830423U (zh) | 一种轧制界面油膜厚度测量装置 | |
| KR101934319B1 (ko) | 측량 방법 및 측량 장치 | |
| CN203981263U (zh) | 高精度衡器载荷测量仪的自动定值系统 | |
| CN208937010U (zh) | 一种测量工具 | |
| CN203470867U (zh) | 钢水液面计离线校对装置 | |
| CN208476127U (zh) | 一种防抖动三坐标测量机 | |
| CN109308362B (zh) | 筏板后浇带的构建方法、系统及计算机装置 | |
| CN110941747B (zh) | 示功图处理方法、装置及设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |