KR20130000278A - 로봇 청소기 및 이의 제어 방법 - Google Patents
로봇 청소기 및 이의 제어 방법 Download PDFInfo
- Publication number
- KR20130000278A KR20130000278A KR1020110060876A KR20110060876A KR20130000278A KR 20130000278 A KR20130000278 A KR 20130000278A KR 1020110060876 A KR1020110060876 A KR 1020110060876A KR 20110060876 A KR20110060876 A KR 20110060876A KR 20130000278 A KR20130000278 A KR 20130000278A
- Authority
- KR
- South Korea
- Prior art keywords
- images
- points
- feature
- feature points
- matching
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/009—Carrying-vehicles; Arrangements of trollies or wheels; Means for avoiding mechanical obstacles
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
Description
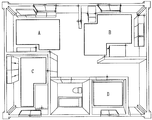
도 2는 본 발명의 실시 예들에 따라 특징점을 추출하는 동작을 설명하기 위한 도;
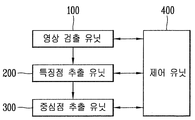
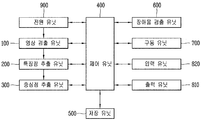
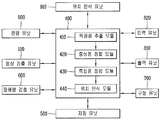
도 3 내지 도 5는 본 발명의 실시 예들에 따른 로봇 청소기의 구성을 개략적으로 보인 블록도;
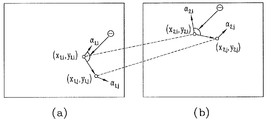
도 6a 및 도 6b는 본 발명의 실시 예들에 따라 특징점을 추출하는 동작을 설명하기 위한 도;
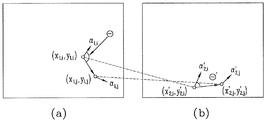
도 7a 및 도 7b는 본 발명의 실시 예들에 따라 특징점을 정합하는 동작을 설명하기 위한 도;
도 8 내지 도 11은 본 발명의 실시 예들에 따른 로봇 청소기의 제어 방법을 개략적으로 보인 흐름도;
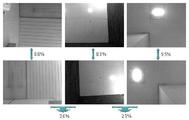
도 12 내지 도 16은 본 발명의 실시 예들에 따라 중심점 정합을 이용하여 영상의 유사도를 연산하는 동작을 설명하기 위한 도들이다.

300: 중심점 추출 유닛 400: 제어 유닛
500: 저장 유닛 600: 장애물 검출 유닛
700: 구동 유닛 810: 출력 유닛
820: 입력 유닛 900: 전원 유닛
910: 위치 인식 유닛 410: 특징점 추출 모듈
420: 중심점 정합 모듈 430: 특징점 정합 모듈
440: 위치 인식 모듈
Claims (18)
- 주변을 촬영하여 복수의 영상들을 검출하는 영상 검출 유닛;
상기 복수의 영상들 각각에 대하여 특징점 정보를 갖는 복수의 특징점들을 추출하는 특징점 추출 유닛;
상기 특징점 정보를 근거로 상기 복수의 특징점들로부터 일정 개수의 집합들로 구분하여 각 집합들에 대한 중심점을 추출하는 중심점 추출 유닛; 및
상기 중심점들을 이용하여 상기 복수의 영상들 사이의 유사도를 연산하고, 연산 결과를 근거로 로봇 청소기의 위치를 인식하는 제어 유닛;을 포함하는 로봇 청소기. - 제1 항에 있어서,
상기 복수의 영상들을 상기 중심점들로 표현하여 저장하는 저장 유닛;을 더 포함하는 로봇 청소기. - 제2 항에 있어서, 상기 제어 유닛은,
새로 검출한 영상에 대한 일정 개수의 중심점들과 상기 복수의 영상들에 대한 중심점들 사이의 유사도를 이용하여 중심점들을 정합하는 중심점 정합 모듈;을 포함하는 것을 특징으로 하는 로봇 청소기. - 제3 항에 있어서, 상기 제어 유닛은,
상기 특징점 정보를 비교하여 상기 복수의 특징점들을 정합하는 특징점 정합 모듈;을 더 포함하는 것을 특징으로 하는 로봇 청소기. - 제4 항에 있어서, 상기 특징점 정합 모듈은,
상기 연산한 유사도가 일정 기준 유사도 이상인 영상들 내의 특징점들과 상기 새로 검출한 영상들 내의 특징점들을 정합하는 것을 특징으로 하는 로봇 청소기. - 제4 항에 있어서, 상기 특징점 정합 모듈은,
상기 연산한 유사도가 큰 일정 개수의 영상들을 선별하고, 선별한 영상들 내의 특징점들과 상기 새로 검출한 영상들 내의 특징점들을 정합하는 것을 특징으로 하는 로봇 청소기. - 제1 항 내지 제6 항 중 어느 한 항에 있어서,
상기 특징점 정보는, 상기 영상에서의 위치, 방향, 및 기술자를 포함하고,
상기 기술자는, 상기 특징점의 추출 정보를 나타내는 것을 특징으로 하는 로봇 청소기. - 제7 항에 있어서,
주변의 장애물을 검출하는 장애물 검출 유닛;을 더 포함하고,
상기 제어 유닛은, 상기 장애물을 근거로 내부지도를 생성하고, 상기 내부지도를 근거로 청소경로 또는 주행경로를 설정하는 것을 특징으로 하는 로봇 청소기. - 제8 항에 있어서, 상기 제어 유닛은,
상기 위치를 근거로 상기 청소경로 또는 상기 주행경로를 수정하고, 수정된 청소경로 또는 수정된 주행경로를 근거로 청소를 수행하거나, 또는 주행하는 것을 특징으로 하는 로봇 청소기. - 제1 항에 있어서, 상기 영상 검출 유닛은,
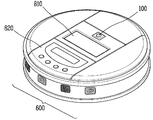
로봇 청소기의 상부에 설치되고, 상방을 촬영하여 상방 영상을 검출하는 상방 카메라;인 것을 특징으로 하는 로봇 청소기. - 복수의 영상들 각각에 대하여 특징점 정보를 갖는 복수의 특징점들을 추출하고, 상기 특징점 정보를 근거로 상기 복수의 특징점들로부터 일정 개수의 집합들로 구분하여 각 집합들에 대한 중심점을 추출한 다음, 상기 중심점들을 이용하여 로봇 청소기의 위치를 인식하는 로봇 청소기의 제어 방법.
- 제11 항에 있어서,
새로 검출한 영상에 대한 일정 개수의 중심점들과 상기 복수의 영상들에 대한 중심점들 이용하여 상기 복수의 영상들 사이의 유사도를 연산하고, 연산 결과를 근거로 로봇 청소기의 위치를 인식하는 로봇 청소기의 제어 방법. - 제11 항 또는 제12 항에 있어서,
주변을 촬영하여 상기 복수의 영상들을 검출하는 영상 검출 단계;
상기 복수의 영상들 각각에 대하여 상기 복수의 특징점들을 추출하는 특징점 추출 단계;
상기 특징점 정보를 근거로 상기 복수의 특징점들로부터 상기 중심점들을 추출하는 중심점 추출 단계;
상기 중심점들을 이용하여 상기 복수의 영상들 사이의 유사도를 이용하여 상기 중심점들을 정합하는 중심점 정합 단계; 및
상기 중심점들의 정합 결과를 이용하여 상기 위치를 인식하는 위치 인식 단계;를 포함하는 로봇 청소기의 제어 방법. - 제13 항에 있어서,
상기 복수의 영상들을 상기 중심점들로 표현하여 저장하는 영상 저장 단계;를 더 포함하는 로봇 청소기의 제어 방법. - 제14 항에 있어서,
상기 특징점 정보를 비교하여 상기 복수의 특징점들을 정합하는 특징점 정합 단계;를 더 포함하는 로봇 청소기의 제어 방법. - 제15 항에 있어서, 상기 특징점 정합 단계는,
상기 연산한 유사도가 일정 기준 유사도 이상인 영상들 내의 특징점들과 상기 새로 검출한 영상들 내의 특징점들을 정합하는 것을 특징으로 하는 로봇 청소기의 제어 방법. - 제15 항에 있어서, 상기 특징점 정합 단계는,
상기 연산한 유사도가 큰 일정 개수의 영상들을 선별하고, 선별한 영상들 내의 특징점들과 상기 새로 검출한 영상들 내의 특징점들을 정합하는 것을 특징으로 하는 로봇 청소기의 제어 방법. - 제15 항에 있어서,
주변의 장애물을 검출하는 장애물 검출 단계;
상기 장애물을 근거로 내부지도를 생성하는 지도 생성 단계;
상기 내부지도를 근거로 청소경로 또는 주행경로를 설정하는 단계;
상기 위치를 근거로 상기 청소경로 또는 상기 주행경로를 수정하는 단계; 및
상기 수정된 청소경로 또는 상기 수정된 주행경로를 근거로 청소를 수행하거나, 또는 주행하는 수행 단계;를 더 포함하는 로봇 청소기의 제어 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020110060876A KR101951414B1 (ko) | 2011-06-22 | 2011-06-22 | 로봇 청소기 및 이의 제어 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020110060876A KR101951414B1 (ko) | 2011-06-22 | 2011-06-22 | 로봇 청소기 및 이의 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20130000278A true KR20130000278A (ko) | 2013-01-02 |
| KR101951414B1 KR101951414B1 (ko) | 2019-02-22 |
Family
ID=47833898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020110060876A Expired - Fee Related KR101951414B1 (ko) | 2011-06-22 | 2011-06-22 | 로봇 청소기 및 이의 제어 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101951414B1 (ko) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015008874A1 (ko) * | 2013-07-15 | 2015-01-22 | 엘지전자 주식회사 | 로봇 청소기 및 그 로봇 청소기의 3d 센서 자가 교정 방법 |
| CN104793492A (zh) * | 2015-04-07 | 2015-07-22 | 中国科学技术大学 | 一种基于熵和灰关联度的室内环境特征提取方法 |
| CN105116886A (zh) * | 2015-08-11 | 2015-12-02 | 余路 | 一种机器人自主行走的方法 |
| KR20160038437A (ko) * | 2014-09-30 | 2016-04-07 | 엘지전자 주식회사 | 로봇 청소기 및 로봇 청소기의 제어방법 |
| KR20160048750A (ko) * | 2016-04-22 | 2016-05-04 | 엘지전자 주식회사 | 로봇 청소기 및 로봇 청소기의 제어방법 |
| WO2016182187A1 (en) * | 2015-05-12 | 2016-11-17 | Samsung Electronics Co., Ltd. | Robot and controlling method thereof |
| WO2017088511A1 (zh) * | 2015-11-25 | 2017-06-01 | 江苏美的清洁电器股份有限公司 | 智能吸尘器 |
| US10939791B2 (en) | 2016-04-25 | 2021-03-09 | Lg Electronics Inc. | Mobile robot and mobile robot control method |
| CN120182276A (zh) * | 2025-05-22 | 2025-06-20 | 南京易自助网络科技有限公司 | 自动化洗车设备用智能清洁剂投放控制方法及系统 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003064116A2 (en) * | 2002-01-31 | 2003-08-07 | Braintech Canada, Inc. | Method and apparatus for single camera 3d vision guided robotics |
| US20090024251A1 (en) * | 2007-07-18 | 2009-01-22 | Samsung Electronics Co., Ltd. | Method and apparatus for estimating pose of mobile robot using particle filter |
| US20090161968A1 (en) * | 2007-12-24 | 2009-06-25 | Microsoft Corporation | Invariant visual scene and object recognition |
| EP2078996A2 (en) * | 2008-01-11 | 2009-07-15 | Samsung Electronics Co., Ltd. | Method and apparatus for planning path of mobile robot |
| KR20110009547A (ko) * | 2009-07-22 | 2011-01-28 | 엘지전자 주식회사 | 이동 로봇의 위치추정을 위한 회전변화에 불변하는 특징점 검출 장치 및 방법 |
| KR20110011424A (ko) * | 2009-07-28 | 2011-02-08 | 주식회사 유진로봇 | 이동 로봇의 위치 인식 및 주행 제어 방법과 이를 이용한 이동 로봇 |
| US20120125363A1 (en) * | 2010-11-24 | 2012-05-24 | Samsung Electronics Co., Ltd. | Robot cleaner and control method thereof |
-
2011
- 2011-06-22 KR KR1020110060876A patent/KR101951414B1/ko not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003064116A2 (en) * | 2002-01-31 | 2003-08-07 | Braintech Canada, Inc. | Method and apparatus for single camera 3d vision guided robotics |
| US20090024251A1 (en) * | 2007-07-18 | 2009-01-22 | Samsung Electronics Co., Ltd. | Method and apparatus for estimating pose of mobile robot using particle filter |
| US20090161968A1 (en) * | 2007-12-24 | 2009-06-25 | Microsoft Corporation | Invariant visual scene and object recognition |
| EP2078996A2 (en) * | 2008-01-11 | 2009-07-15 | Samsung Electronics Co., Ltd. | Method and apparatus for planning path of mobile robot |
| KR20110009547A (ko) * | 2009-07-22 | 2011-01-28 | 엘지전자 주식회사 | 이동 로봇의 위치추정을 위한 회전변화에 불변하는 특징점 검출 장치 및 방법 |
| KR20110011424A (ko) * | 2009-07-28 | 2011-02-08 | 주식회사 유진로봇 | 이동 로봇의 위치 인식 및 주행 제어 방법과 이를 이용한 이동 로봇 |
| US20120125363A1 (en) * | 2010-11-24 | 2012-05-24 | Samsung Electronics Co., Ltd. | Robot cleaner and control method thereof |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015008874A1 (ko) * | 2013-07-15 | 2015-01-22 | 엘지전자 주식회사 | 로봇 청소기 및 그 로봇 청소기의 3d 센서 자가 교정 방법 |
| US10307912B2 (en) | 2013-07-15 | 2019-06-04 | Lg Electronics Inc. | Robot cleaner and method for auto-correcting 3D sensor of the robot cleaner |
| KR20160038437A (ko) * | 2014-09-30 | 2016-04-07 | 엘지전자 주식회사 | 로봇 청소기 및 로봇 청소기의 제어방법 |
| US9798957B2 (en) | 2014-09-30 | 2017-10-24 | Lg Electronics Inc. | Robot cleaner and control method thereof |
| CN104793492B (zh) * | 2015-04-07 | 2017-07-28 | 中国科学技术大学 | 一种基于熵和灰关联度的室内环境特征提取方法 |
| CN104793492A (zh) * | 2015-04-07 | 2015-07-22 | 中国科学技术大学 | 一种基于熵和灰关联度的室内环境特征提取方法 |
| WO2016182187A1 (en) * | 2015-05-12 | 2016-11-17 | Samsung Electronics Co., Ltd. | Robot and controlling method thereof |
| US10383497B2 (en) | 2015-05-12 | 2019-08-20 | Samsung Electronics Co., Ltd. | Robot and controlling method thereof |
| CN105116886A (zh) * | 2015-08-11 | 2015-12-02 | 余路 | 一种机器人自主行走的方法 |
| WO2017088511A1 (zh) * | 2015-11-25 | 2017-06-01 | 江苏美的清洁电器股份有限公司 | 智能吸尘器 |
| KR20160048750A (ko) * | 2016-04-22 | 2016-05-04 | 엘지전자 주식회사 | 로봇 청소기 및 로봇 청소기의 제어방법 |
| US10939791B2 (en) | 2016-04-25 | 2021-03-09 | Lg Electronics Inc. | Mobile robot and mobile robot control method |
| CN120182276A (zh) * | 2025-05-22 | 2025-06-20 | 南京易自助网络科技有限公司 | 自动化洗车设备用智能清洁剂投放控制方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101951414B1 (ko) | 2019-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101677634B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR101813922B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR101366860B1 (ko) | 이동 로봇 및 이의 제어 방법 | |
| KR101951414B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| US11674809B2 (en) | Moving robot and control method thereof | |
| KR20120044768A (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR101649645B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| US10213082B2 (en) | Robot cleaner | |
| KR101976462B1 (ko) | 로봇청소기 및 그 제어방법 | |
| KR20120021064A (ko) | 이동 로봇 및 이의 제어 방법 | |
| KR101842459B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| US10303179B2 (en) | Moving robot and method of recognizing location of a moving robot | |
| US11055341B2 (en) | Controlling method for artificial intelligence moving robot | |
| KR101303161B1 (ko) | 이동 로봇 및 이의 제어 방법 | |
| KR101943359B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR20110085500A (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR101895314B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| US20240335080A1 (en) | Mobile robot | |
| KR102620361B1 (ko) | 로봇 청소기 | |
| KR20160090278A (ko) | 이동 로봇 및 이의 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20240219 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20240219 |