KR101961663B1 - 플랫폼 운용시스템 및 그의 표적 포착 방법 - Google Patents
플랫폼 운용시스템 및 그의 표적 포착 방법 Download PDFInfo
- Publication number
- KR101961663B1 KR101961663B1 KR1020170066357A KR20170066357A KR101961663B1 KR 101961663 B1 KR101961663 B1 KR 101961663B1 KR 1020170066357 A KR1020170066357 A KR 1020170066357A KR 20170066357 A KR20170066357 A KR 20170066357A KR 101961663 B1 KR101961663 B1 KR 101961663B1
- Authority
- KR
- South Korea
- Prior art keywords
- target
- image
- image frame
- platform
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G3/00—Aiming or laying means
- F41G3/14—Indirect aiming means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G11/00—Details of sighting or aiming apparatus; Accessories
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Geometry (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
- Image Analysis (AREA)
Abstract
Description
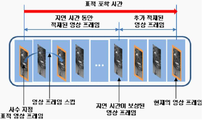
도 2는 사수 지정 표적에 따른 지연 시간동안 적재된 영상 프레임과 표적 포착 알고리즘 동작 시간동안 추가로 적재된 영상 프레임을 나타낸 도면.
도 3은 본 발명에서 플랫폼과 표적과의 거리에 따른 표적 크기 변화율을 도시화한 그래프.
도 4는 본 발명의 실시예에 따른 플랫폼 운용시스템에서 표적 지정 지연시간을 보상하여 표적을 포착하는 동작을 나타낸 순서도.

120 : 구동부
Claims (9)
- 표적 포착시간내에서 표적을 탐지하여 표적으로 진입하는 플랫폼 운용 시스템에 있어서,
사수가 표적을 지정할 수 있도록 표적의 영상 프레임을 주기적으로 생성하여 사수에게 제공하는 영상 센서; 및
제1영상 프레임에서 사수가 표적을 지정한 경우 해당 표적의 위치정보가 수신되기까지의 표적 지정 지연시간동안 상기 영상 센서에서 생성되어 버퍼에 적재되는 제1영상 프레임 이후의 영상 프레임과 표적 포착시간동안 추가로 적재되는 영상 프레임을 일정한 영상 프레임 수만큼 스킵하면서 상기 지정 표적에 대한 크기 변화율을 추정하고 표적점을 추적하여 표적을 포착하는 영상 추적기;를 포함하고,
상기 영상 추적기는,
표적 포착 시간() 대비 지연 시간동안 적재된 전체 영상 프레임(BN)의 추적 처리시간의 비율과 하나의 영상 프레임에 대한 획득시간( ) 대비 처리시간(
) 대비 처리시간( )의 비율을 가산하여 스킵해야 할 영상 프레임의 수(
)의 비율을 가산하여 스킵해야 할 영상 프레임의 수( )를
)를 에 의해 결정하는 것을 특징으로 하는 플랫폼 운용 시스템.
에 의해 결정하는 것을 특징으로 하는 플랫폼 운용 시스템.
- 제1항에 있어서, 상기 표적 포착시간은
표적 지정 지연시간 동안 적재된 영상 프레임과 표적 포착 시간동안 추가로 적재된 영상 프레임을 일정한 영상 프레임 수만큼 건너뛰면서 처리한 시간과 동일한 것을 특징으로 하는 플랫폼 운용 시스템. - 삭제
- 제1항에 있어서, 상기 영상 추적기는
아래의 수학식에 의해 결정되는 표적 크기 변화율 범위 내에서, 플랫폼 이동 속도와 사수의 최종 표적 지정을 위한 플랫폼과 표적과의 거리를 이용하여 표적에 대한 크기 변화율()을 추정하여 표적을 포착하는 것을 특징으로 하는 플랫폼 운용 시스템.

여기서, 상기는 표적을 최종으로 지정할 수 있는 표적과 플랫폼간의 거리이고, 는 플랫폼의 이동 속도를 나타낸다.
는 플랫폼의 이동 속도를 나타낸다.
- 제1항에 있어서, 상기 영상 추적기는
상기 표적 지정 지연시간 동안 영상 센서에서 생성되어 적재되는 복수의 영상 프레임에서 스킵할 프레임 수를 결정하여, 상기 표적 지정 지연시간동안 적재된 영상 프레임과 상기 표적 포착 시간동안 추가로 적재되는 영상 프레임을 상기 결정된 영상 프레임 수만큼 스킵하여 지연 시간을 보상하는 것을 특징으로 하는 플랫폼 운용 시스템. - 표적 포착시간내에서 표적을 탐지하여 표적으로 진입하는 플랫폼 운용 시스템의 표적 탐지 방법에 있어서,
영상 센서를 통해 표적의 영상 프레임을 주기적으로 생성하는 단계;
상기 생성된 영상 프레임을 사수로 전송하고 버퍼에 적재하는 단계;
제1영상 프레임에서 사수가 표적을 지정한 경우 해당 표적의 위치정보가 수신되기까지의 표적 지정 지연시간동안 상기 영상 센서에서 생성되어 버퍼에 적재되는 제1영상 프레임 이후의 영상 프레임과 상기 표적 포착 시간동안 추가로 적재되는 영상 프레임에서 스킵할 프레임 수를 결정하는 단계;
상기 결정된 프레임 수에 따라 표적 지정 지연시간 동안 적재된 영상 프레임과 상기 표적 포착시간동안 추가로 적재되는 영상 프레임을 스킵하는 단계; 및
상기 영상 프레임 스킵 중에 상기 지정 표적에 대한 크기 변화율을 추정하고 표적점을 추적하여 표적을 포착하는 단계;를 포함하고,
상기 스킵할 프레임 수를 결정하는 단계는
표적 포착 시간() 대비 표적 지정 지연시간동안 적재된 전체 영상 프레임(BN)의 추적 처리시간의 비율과 하나의 영상 프레임에 대한 획득시간( ) 대비 처리시간(
) 대비 처리시간( )의 비율을 가산하여 스킵해야 할 영상 프레임의 수(
)의 비율을 가산하여 스킵해야 할 영상 프레임의 수( )를
)를 로 결정하는 것을 특징으로 하는 플랫폼 운용 시스템의 표적 포착방법.
로 결정하는 것을 특징으로 하는 플랫폼 운용 시스템의 표적 포착방법.
- 제6항에 있어서, 상기 표적 포착시간은
표적 지정 지연시간 동안 적재된 영상 프레임과 표적 포착 시간동안 추가로 적재된 영상 프레임을 일정한 영상 프레임 수만큼 건너뛰면서 처리한 시간과 동일한 것을 특징으로 하는 플랫폼 운용 시스템의 표적 포착방법. - 삭제
- 제6항에 있어서, 상기 표적을 포착하는 단계는
아래의 수학식에 의해 정되는 표적 크기 변화율 범위 내에서, 플랫폼 이동 속도와 사수의 최종 표적 지정을 위한 플랫폼과 표적과의 거리를 이용하여 표적에 대한 크기 변화율()을 추정하여 표적을 포착하는 것을 특징으로 하는 플랫폼 운용 시스템의 표적 포착방법.

여기서, 상기는 표적을 최종으로 지정할 수 있는 표적과 플렛폼간의 거리이고, 는 플랫폼의 이동 속도를 나타낸다.
는 플랫폼의 이동 속도를 나타낸다.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170066357A KR101961663B1 (ko) | 2017-05-29 | 2017-05-29 | 플랫폼 운용시스템 및 그의 표적 포착 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170066357A KR101961663B1 (ko) | 2017-05-29 | 2017-05-29 | 플랫폼 운용시스템 및 그의 표적 포착 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180130643A KR20180130643A (ko) | 2018-12-10 |
| KR101961663B1 true KR101961663B1 (ko) | 2019-03-27 |
Family
ID=64670413
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170066357A Active KR101961663B1 (ko) | 2017-05-29 | 2017-05-29 | 플랫폼 운용시스템 및 그의 표적 포착 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101961663B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102032960B1 (ko) * | 2019-04-22 | 2019-11-08 | 국방과학연구소 | 영상 추적 레이저 제어장치 및 제어방법 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102068800B1 (ko) * | 2019-08-09 | 2020-01-22 | 국방과학연구소 | 원격구동 카메라 및 그 제어 방법 |
| CN115767028A (zh) * | 2022-11-14 | 2023-03-07 | 航天时代飞鸿技术有限公司 | 一种提高视频目标跟踪锁定精度的方法和系统 |
| KR102752837B1 (ko) * | 2024-02-05 | 2025-01-10 | 주식회사 비에이솔루션즈 | 팬/틸트/줌 기반의 자동 영상 추적 시스템 및 방법 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009212637A (ja) * | 2008-03-03 | 2009-09-17 | Sanyo Electric Co Ltd | 撮像装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0720383B1 (en) * | 1994-12-30 | 2000-09-13 | Daewoo Electronics Co., Ltd | Method and apparatus for detecting motion vectors in a frame decimating video encoder |
-
2017
- 2017-05-29 KR KR1020170066357A patent/KR101961663B1/ko active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009212637A (ja) * | 2008-03-03 | 2009-09-17 | Sanyo Electric Co Ltd | 撮像装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102032960B1 (ko) * | 2019-04-22 | 2019-11-08 | 국방과학연구소 | 영상 추적 레이저 제어장치 및 제어방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20180130643A (ko) | 2018-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11483521B2 (en) | Information processing system, information processing method, and program | |
| EP2862146B1 (en) | Adaptive switching between a vision aided intertial camera pose estimation and a vision based only camera pose estimation. | |
| KR101961663B1 (ko) | 플랫폼 운용시스템 및 그의 표적 포착 방법 | |
| CN110163909A (zh) | 用于获得设备位姿的方法、装置和存储介质 | |
| JPWO2010097943A1 (ja) | 車両相対位置推定装置及び車両相対位置推定方法 | |
| KR20150110697A (ko) | 타깃 오브젝트를 추적 및 검출하기 위한 시스템들 및 방법들 | |
| CN108027230B (zh) | 信息处理设备、信息处理方法和程序 | |
| CN106998425B (zh) | 振动检测设备、振动检测方法和摄像设备 | |
| JP2009074859A (ja) | 運動計測装置及び位置計測装置 | |
| US11430204B2 (en) | Information processing device, information processing method, and program | |
| US10575717B2 (en) | Capsule endoscope, capsule endoscope system, and method for controlling capsule endoscope | |
| US12437440B2 (en) | Positioning device | |
| US8730333B2 (en) | Image stabilization system | |
| KR101877232B1 (ko) | 영상 유사도 및 추적 지점 변화량 기반의 영상 추적기 시스템 및 그의 추적 안정도 판별 방법 | |
| JP4558696B2 (ja) | 動物体自動追尾装置 | |
| CN107920200A (zh) | 图像模糊校正装置及其控制方法和摄像装置 | |
| CN114070954A (zh) | 视频数据与遥测数据同步方法、装置、电子设备及介质 | |
| US7800653B2 (en) | Systems and methods for compensating signal drift according to a calculated absolute difference value | |
| KR102037877B1 (ko) | 운용자 개입 운용 유도무기의 표적 추적 장치 | |
| KR102037881B1 (ko) | 운용자 개입 운용 유도무기의 표적 추적 방법 | |
| KR102394189B1 (ko) | 하우징에 장착된 이기종 카메라의 영상 동기화 방법 및 그 장치 | |
| JP6602089B2 (ja) | 画像処理装置及びその制御方法 | |
| KR101199940B1 (ko) | 이동체 탑재형 영상 추적 장치 | |
| KR101362761B1 (ko) | 카메라 패닝 상황에서 안정적인 손떨림 보정 방법 및 장치 | |
| JP2011166426A (ja) | 追尾カメラ雲台装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20170529 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20180806 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20190313 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20190319 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20190320 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20220221 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20230223 Start annual number: 5 End annual number: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240221 Start annual number: 6 End annual number: 6 |
|
| PR1001 | Payment of annual fee |
Payment date: 20250226 Start annual number: 7 End annual number: 7 |