JP7616601B2 - Exercise training device and program - Google Patents
Exercise training device and program Download PDFInfo
- Publication number
- JP7616601B2 JP7616601B2 JP2021059732A JP2021059732A JP7616601B2 JP 7616601 B2 JP7616601 B2 JP 7616601B2 JP 2021059732 A JP2021059732 A JP 2021059732A JP 2021059732 A JP2021059732 A JP 2021059732A JP 7616601 B2 JP7616601 B2 JP 7616601B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- operation unit
- axis
- parameter
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Landscapes
- Rehabilitation Tools (AREA)
Description
本発明は運動訓練装置に係り、特に、使用者の平面運動を支援可能な運動訓練装置、及び、運動訓練装置に用いられるプログラムに関する。 The present invention relates to an exercise training device, and in particular to an exercise training device capable of assisting a user in performing planar exercise, and a program used with the exercise training device.
従来、運動機能を向上させるために様々な運動訓練が行われている。例えば、机上を拭くような動作で肩や肘を屈伸させるワイピング訓練や傾斜したボード上で手を上下方向に滑動させるサンディング訓練が広く行われている。そして、これらの運動訓練を支援するために種々の運動訓練装置が提案されている。 Conventionally, various types of exercise training have been performed to improve motor function. For example, wiping training, in which the shoulders and elbows are flexed and extended as if wiping the surface of a desk, and sanding training, in which the hands are slid up and down on an inclined board, are widely used. In order to support these exercise training methods, various exercise training devices have been proposed.
例えば、特許文献1には、XY平面で移動可能な操作部と、X軸およびY軸方向駆動モータを有し操作部をXY平面で駆動する駆動部と、操作部に作用するX軸およびY軸方向の力Fx,Fyを検出する力センサと、力センサで検出されたX軸およびY軸方向の力Fx,Fyに基づいてX軸およびY軸方向駆動モータを制御する制御部とを備えた運動訓練装置が開示されている。また、特許文献1には、操作部の移動方向に対し摩擦力が生じるようにモータを制御する構成が開示されている。
For example,
しかしながら、運動訓練装置において、更なる訓練効果が得られる装置が求められている。 However, there is a demand for exercise training devices that can provide even greater training benefits.
本発明の一態様は、XY平面で移動可能な操作部と、X軸およびY軸方向駆動モータを有し、前記操作部をXY平面で駆動する駆動部と、前記操作部を操作する使用者から前記操作部に作用するX軸およびY軸方向の力Fx,Fyを検出する力センサと、前記力センサの出力と、設定されたパラメータに応じて、前記X軸およびY軸方向駆動モータを制御する制御部と、を備え、前記制御部は、前記操作部が一定の方向に一定速度で移動している場合において、前記パラメータが第1の値に設定された場合には、前記操作部が前記一定の方向に前記一定速度で移動することを維持するために必要な前記力センサに入力される前記X軸およびY軸方向の力Fx,Fyの入力合成力F I が第1の力になるように、前記X軸およびY軸方向駆動モータを制御し、前記パラメータが前記第1の値よりも小さい第2の値に設定された場合には、前記入力合成力F I が前記第1の力よりも大きい第2の力になるように、前記X軸およびY軸方向駆動モータを制御する、ことを特徴とする運動訓練装置である。 One aspect of the present invention is an exercise training device comprising: an operation unit movable in an XY plane; a drive unit having X-axis and Y-axis drive motors and driving the operation unit in the XY plane; a force sensor that detects X-axis and Y-axis forces Fx, Fy acting on the operation unit from a user operating the operation unit; and a control unit that controls the X-axis and Y-axis drive motors in accordance with an output of the force sensor and a set parameter, wherein when the operation unit is moving in a constant direction at a constant speed , if the parameter is set to a first value, the control unit controls the X-axis and Y-axis drive motors so that an input resultant force F I of the X-axis and Y-axis forces Fx, Fy input to the force sensor necessary to maintain the operation unit moving in the constant direction at the constant speed becomes a first force, and when the parameter is set to a second value smaller than the first value , the control unit controls the X-axis and Y-axis drive motors so that the input resultant force F I becomes a second force larger than the first force .
本発明の一態様は、XY平面で移動可能な操作部と、X軸およびY軸方向駆動モータを有し、前記操作部をXY平面で駆動する駆動部と、前記操作部を操作する使用者から前記操作部に作用するX軸およびY軸方向の力Fx,Fyを検出する力センサと、前記力センサの出力と、設定されたパラメータに応じて、前記X軸およびY軸方向駆動モータを制御する制御部と、を備えた運動訓練装置に用いられるプログラムであって、前記パラメータを第1の値と前記第1の値よりも小さい第2の値との何れかに設定する第1工程と、前記操作部が一定の方向に一定速度で移動している場合において、前記パラメータが前記第1の値に設定された場合には、前記操作部が前記一定の方向に前記一定速度で移動することを維持するために必要な前記力センサに入力される前記X軸およびY軸方向の力Fx,Fyの入力合成力F I が第1の力になるように、前記制御部に前記X軸およびY軸方向駆動モータを制御させ、前記パラメータが前記第2の値に設定された場合には、前記入力合成力F I が前記第1の力よりも大きい第2の力になるように、前記制御部に前記X軸およびY軸方向駆動モータを制御させる第2工程と、をコンピュータにより実行させる、ことを特徴とするプログラムである。 One aspect of the present invention is a program for use in an exercise training device including an operation unit movable in an XY plane, a drive unit having X-axis and Y-axis drive motors and driving the operation unit in the XY plane, a force sensor that detects forces Fx and Fy in the X-axis and Y-axis directions acting on the operation unit from a user operating the operation unit, and a control unit that controls the X-axis and Y-axis drive motors in accordance with an output of the force sensor and a set parameter, the program including a first step of setting the parameter to either a first value or a second value smaller than the first value, and when the operation unit is moving at a constant speed in a constant direction, when the parameter is set to the first value, causing the control unit to control the X-axis and Y-axis drive motors so that an input resultant force F I of the X-axis and Y-axis forces Fx and Fy input to the force sensor necessary to maintain the operation unit moving at the constant speed in the constant direction becomes a first force, and when the parameter is set to the second value, causing the control unit to control the X-axis and Y-axis drive motors so that an input resultant force F I of the X-axis and Y-axis forces Fx and Fy input to the force sensor necessary to maintain the operation unit moving at the constant speed in the constant direction becomes a first force, and a second step of causing the control unit to control the X-axis and Y-axis direction drive motors so that I becomes a second force greater than the first force .
本発明によれば、更なる訓練効果が得られる。 The present invention provides even greater training benefits.
以下、図面を参照して本発明が適用可能な実施形態の運動訓練装置について説明する。なお、本実施形態の運動訓練装置は略水平な載置面に載置され、例えば、使用者(運動訓練者)の上肢の運動機能向上を目的として行われる運動訓練に使用される(図1参照)。運動訓練装置1は、図1に示すように、操作部3を有し、使用者Uは運動訓練装置1の前側に位置し、例えば上肢運動訓練を行うために、右腕ULを前方に伸ばして操作部3を右手で把持している。尚、本明細書中では、図1の運動訓練装置1における使用者Uの手前側を前側、奥側を後側と称することとする。
Below, an embodiment of an exercise training device to which the present invention can be applied will be described with reference to the drawings. The exercise training device of this embodiment is placed on a substantially horizontal support surface and is used, for example, for exercise training performed to improve the motor function of the upper limbs of a user (trainee) (see FIG. 1). As shown in FIG. 1, the
運動訓練装置1は、装置本体100と、PC(パーソナルコンピューター)70とを有する。また、本実施形態では、これら装置本体100及びPC70に加えて、運動訓練装置1の情報を表示するモニター76を含めて運動訓練システム1000を構成している。なお、PC70は、運動訓練システム1000全体を制御する制御部であり、制御プログラムがインストールされた汎用性のあるPCでも良いし、運動訓練装置1専用のものであっても良い。いずれにしても、制御部は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)を有している。CPUは、ROMに格納された制御手順に対応するプログラムを読み出しながら各部の制御を行う。また、RAMには、作業用データや入力データが格納されており、CPUは、前述のプログラム等に基づいてRAMに収納されたデータを参照して制御を行う。
The
装置本体100は、XY平面(載置面および基台2と平行な水平面)で移動可能な操作部3、操作部3をXY平面で駆動する駆動部200などを有する。これら操作部3や駆動部200は、基台2上に配置されている。駆動部200は、X軸およびY軸方向駆動モータとしての第1モータ6及び第2モータ30を有する。具体的には、駆動部200は、第1モータ6を有し、操作部3をX軸方向(図2の矢印Xの方向)に移動させる第1アクチュエータ機構AXと、第2モータ30を有し、操作部3及び第1アクチュエータ機構AXをY軸方向(図2の矢印Yの方向)に移動させる第2アクチュエータ機構AYとを備えている。
The device
操作部3は、ハンドル部材62に作用するX軸およびY軸方向の力を検出する力センサ60(図5参照)を備えている。PC70は、力センサ60、モータ制御部27,31及びモニター76に接続されている。X軸およびY軸方向駆動モータ6,30は、XY平面での操作部3の位置を検出する位置検出手段としてのエンコーダ6a、30a(図6)と一体に構成されている。
The
これらの構成により、制御部としてのPC70は、力センサ60やエンコーダ6a、30aからの入力値に基づいて、モータ制御部27,31を介して第1モータ6及び第2モータ30の駆動を制御し、操作部3をXY平面上で移動させ、訓練情報や操作部3の移動軌跡等をモニター76に表示する。
With this configuration, the PC 70 as a control unit controls the driving of the
以下、図2~図5に基づいて各構成について詳細に説明する。操作部3は、第1スライダーブロック4(第1保持部材)に取付プレート5を介して取り付けられており、第1スライダーブロック4と一体となって移動するように構成されている。第1スライダーブロック4は、XY平面上のX軸方向に延設した第1ガイドロッド9aおよび9bに沿ってスライド可能に設けられている。そして、第1ベルト10の一部は、ベルト固定プレート28とビス29によって第1スライダーブロック4に固定されている。これにより、第1ベルト10が第1モータ(X軸方向駆動モータ)6によって回転駆動すると、第1スライダーブロック4は第1ガイドロッド9a,9bに沿ってX軸方向にスライド移動する。
Each component will be described in detail below with reference to Figs. 2 to 5. The
図3に示す通り、第1アクチュエータ機構AXの第1モータ6の駆動は、軸13、プーリー14、ベルト15、プーリー17および軸16を介してプーリー18に伝達される。第1モータ6は支持板21に設けられており、支持板21は支持板11に固定されている。支持板11は、軸16を回転可能に支持し、第2スライダーブロック7とモータ制御部27を固定支持している。なお、支持板11及び第2スライダーブロック7を併せて第1ガイドロッド9a,9bの一端およびプーリー18を保持する第2保持部材という。
As shown in FIG. 3, the drive of the
X軸方向において第1モータ6の反対側には、支持板12,24が設けられている。支持板12,24は、軸19を回転可能に支持し、第3スライダーブロック8を固定支持している。軸19にはプーリー20が設けられており、プーリー18とプーリー19との間に第1ベルト10が架け渡されている。また、第1ガイドロッド9a,9bの一端は第2スライダーブロック7に固定支持され、第1ガイドロッド9a,9bの他端は第3スライダーブロック8に固定支持されている。なお、支持板12,24及び第3スライダーブロック8を併せて第1ガイドロッド9a,9bの他端およびプーリー20を保持する第3保持部材という。
上述した通り、第1スライダーブロック4は、第1ベルト10の一部が固定されており、第1モータ6を駆動するとプーリー18が回転してプーリー19と共に第1ベルト10が回転する。このため、第1スライダーブロック4は、第1ガイドロッド9a,9bに沿ってX軸方向にスライド移動する。なお、第1ベルト10と第1ガイドロッド9a,9bは、それぞれX軸方向に平行で且つ第1ベルト10の両側に第1ガイドロッド9aと9bが配置され、基台2からの高さ位置は略同一となっている。
As described above, a portion of the
図2に示す様に、第1アクチュエータ機構AXが有する第2スライダーブロック7と第3スライダーブロック8は、第2ガイドロッド55と第3ガイドロッド48に対してY軸方向にスライド移動可能に支持されている。そして、第2ベルト53と第3ベルト46が回転することで、第1アクチュエータ機構AX全体がY軸方向に移動可能となっている。図3に示す通り、第2ベルト53の一部は、第2スライダーブロック7に固定された支持板21に設けられたベルト固定プレートにビス23によって固定されている。また、第3ベルト46の一部は、第3スライダーブロック8に固定された支持板24に設けられたベルト固定プレート25にビス26によって固定されている。そして、第2アクチュエータ機構AYの第2モータ(Y軸方向駆動モータ)30が回転駆動することによって第3ベルト46および第2ベルト53が回転し、それにより第1アクチュエータ機構AXはY軸方向にスライド移動する。
2, the
次に、図2と図4を用いて第2アクチュエータ機構AYについて説明する。第2アクチュエータ機構AYは、第1アクチュエータ機構AXをY軸方向に移動させるための機構である。第2モータ30およびモータ制御部31は、基台2に設けられた支持板34,支柱33および支持板32からなる支持フレームの上部に設けられている。この支持フレームは使用者Uと反対の装置奥側(基台2のモニター76側)の中央部に固定されている。
Next, the second actuator mechanism AY will be described with reference to Figures 2 and 4. The second actuator mechanism AY is a mechanism for moving the first actuator mechanism AX in the Y-axis direction. The
第2モータ30には不図示の軸およびプーリーが設けられており、プーリー36との間でベルト37が架け渡されている。支持板32と34との間には軸35が回転可能に支持され、この軸35にはプーリー37,38および39が設けられており、プーリー36の回転力が軸35を通じてプーリー38および39に伝達される。
The
支持フレーム32~34のX軸方向の両側には、コの字に形成された支持板45a,52aが設けられている。支持板45aは、軸43を回転可能に支持しており、軸43にプーリー42と44aが設けられている。プーリー38とプーリー42にはベルト40が架け渡されており、第2モータ30の回転駆動をベルト37,プーリー36,軸35,プーリー38,ベルト40,プーリー42および軸43を介してプーリー44aに伝達する。つまり、ベルト40は、第2モータ30の駆動を第3ベルト46に伝達するための第5ベルトである。
支持板45a近傍にはガイド支持部47aが設けられており、第3ガイドロッド48の一端を支持している。また、基台2上で支持板45aのY軸方向における反対側(装置右手前側)には、支持板45aの対となる支持板45bとガイド支持部47aの対となるガイド支持部47bとが配置されている。
A
支持板45bは、軸43bを回転可能に支持し、軸43bにはプーリー44aの対となるプーリー44bが設けられている。第3ベルト46はプーリー44aと44bとの間で架け渡されており、上述した通りその一部が第3スライダーブロック8と一体に移動するベルト固定プレート25に固定されている。また、ガイド支持部47bは、第3ガイドロッド48の他端を支持し、ガイド支持部47aと共に第3ガイドロッド48を固定支持している。第3ベルト46と第3ガイドロッド48とはそれぞれY軸方向に平行に延設され、基台2からの高さ位置は略同一となっている。
The
X軸方向において支持フレームに対して支持板45aの反対側(基台2の左奥側)には、支持板52aが配置されている。支持板52aは、軸49を回転可能に支持しており、軸49にプーリー50と51aが設けられている。プーリー39とプーリー50には、ベルト41が架け渡されており、第2モータ30の回転駆動をベルト37,プーリー36,軸35,プーリー39,ベルト41,プーリー50および軸49を介してプーリー51aに伝達する。つまり、ベルト41は、第2モータ30の駆動を第2ベルト53に伝達するための第4ベルトである。
A
支持板52a近傍にはガイド支持部54aが設けられており、第2ガイドロッド55の一端を支持している。また、基台2上で支持板52aのY軸方向における反対側(装置左手前側)には支持板52aの対となる支持板52bとガイド支持部54aの対となるガイド支持部54bとが配置されている。
A
支持板52bは軸49bを回転可能に支持し、軸49bにはプーリー51aの対となるプーリー51bが設けられている。第2ベルト53は、プーリー51aと51bとの間で架け渡されており、上述した通りその一部が第2スライダーブロック7と一体に移動するベルト固定プレート22に固定されている。また、ガイド支持部54bは、第2ガイドロッド55の他端を支持し、ガイド支持部54aと共に第2ガイドロッド55を固定支持している。第3ベルト46と第3ガイドロッド48とは、それぞれY軸方向に平行に延設され、基台2からの高さ位置は略同一となっている。
The
上述した通り、第2モータ30の回転駆動はプーリー44aとプーリー51aに伝達され、第3ベルト46と第2ベルト53が回転する。これにより、第3ベルト46と第2ベルト53にそれぞれ固定された第3スライダーブロック8と第2スライダーブロック7(つまり第1アクチュエータ機構AX全体)が第2ガイドロッド8と第2ガイドロッド55に沿ってY軸方向にスライド移動する。
As described above, the rotational drive of the
ここで、図4を参照するとベルト40とベルト41とは、X軸方向に平行に延設しているが、高さ方向の位置(基台2からの距離)が異なっている。具体的には、ベルト40の下方にベルト41が配置されている。そして、この高さ方向において、第3ベルト46、第3ガイドロッド48、第2ベルト53および第2ガイドロッド55は、ベルト40とベルト41との間で略同一高さに配置されている。
Now, referring to FIG. 4,
また、図2及び図3を参照すると、操作部3をX軸方向に移動させるための第1ガイドロッド9a,9bおよび第1ベルト10は、操作部3および第1アクチュエータ機構AXをY軸方向に移動させるための第3ガイドロッド48と第2ガイドロッド55との間で、且つ、Y軸方向に平行に配置された第3ガイドロッド48,第3ベルト46,第2ガイドロッド55および第2ベルト53に対して直交するX軸方向に延設するように配置されている。そして、これらの第1ベルト10,第1ガイドロッド9a・9b,第3ベルト46,第3ガイドロッド48,第2ベルト53および第2ガイドロッド55は、高さ方向においてベルト40とベルト41との間に配置されている。これにより、運動訓練装置の高さ方向の寸法を薄く構成することができる。
2 and 3, the
言い換えると、図4において基台2からプーリー44a,51aの上端までの距離(XY平面と直交する方向、つまり高さ)をL1、基台2からプーリー44a,51aの下端までの距離をL2、基台2からプーリー38,42の下端までの距離をL3、基台2からプーリー39,50までの距離をL4としたときに、以下の関係が成り立つように各部材が配置されている。「L1>L2」「L3>L1」「L2>L4」。よって、「L3>L1>L2>L4」となり、プーリー44aとプーリー51aとはL3とL4との間に配置されている。そして、ベルトはそれぞれプーリーの上端と下端との間で架け渡されており、第3ベルト46,第2ベルト53の高さ方向における中央と第3ガイドロッド48,第2ガイドロッド55の高さ方向の中央とが略同一で、第3ガイドロッド48の上端がベルト40に干渉せず、第2ガイドロッド55の下端がベルト41に干渉しないように配置されている。
In other words, in Figure 4, when the distance from the
また、図3において基台2とプーリー18,19の上端までの距離がL1、基台2とプーリー18,19の下端までの距離がL2となるように配置されている。以上から、第1ベルト10、第1ガイドロッド9a,9b、第3ベルト46、第3ガイドロッド48、第2ベルト53および第2ガイドロッド55は、高さ方向においてL3とL4との間、すなわちプーリー38,42の下端とプーリー39,50の上端との間で重複して配置されている。
3, the distance between the
また、第1ベルト10は第1ガイドロッド9a,9bに挟まれるように配置されている。よって、使用者Uが操作部3に力を加えた際に第1ガイドロッド9aまたは9bを中心に回転する力を受けることができ、回転方向の移動を抑えることができる。
The
操作部3は、図1に示すように第1スライダーブロック4の前方向に配置され、図5に示すように、比較的短い垂直な操作ロッド61と、その上端に設けられたハンドル部材62とからなる。本実施形態のハンドル部材62は、使用者Uの上肢ULの運動機能を訓練するために片手で掴むことができるように、比較的厚い小型の円形ディスク状に形成されている。ハンドル部材62は、使用者Uが掴んだ手で回すことができるように、操作ロッド61を中心に回動可能に取り付けられる。
The
また、操作部3は、操作ロッド61に一体に設けられた力センサ60を有する。力センサ60は、取付プレート5を介して、第1アクチュエータ機構AXのスライダーブロック4に一体に固定されている。力センサ60は、使用者Uが自力で操作部3を動かす能動訓練モード及び操作部3の力で上肢又は下肢を動かす受動訓練モードのいずれにおいても、ハンドル部材62から操作ロッド61に作用する使用者Uの力を検出する。本実施形態では、力センサ60として、歪みゲージを用いた6軸力覚センサが採用されている。
The
一般に、6軸力覚センサは、直交する3軸方向x,y,zの力(Fx,Fy,Fz)とx,y,z3軸周りのモーメント(Mx,My,Mz)とを検出することができる。本実施形態では、6軸力覚センサを、そのX軸及びY軸が、第1アクチュエータ機構AXの左右方向(第1ガイドロッド9a,9bと平行な方向)及び前後方向(第3ガイドロッド48および第3ガイドロッド53と平行な方向)とそれぞれ一致するように配向する。
In general, a six-axis force sensor can detect forces (Fx, Fy, Fz) in three orthogonal axial directions x, y, and z, and moments (Mx, My, Mz) about the three axes x, y, and z. In this embodiment, the six-axis force sensor is oriented so that its X-axis and Y-axis coincide with the left-right direction (direction parallel to the
これにより、力センサ60は、使用者Uの上肢又は下肢が操作部3を動かし又は該操作部により動かされるとき、操作ロッド61が使用者Uの上肢又は下肢から直接受ける力を、前後方向の力成分と左右方向の力成分とそれらに直交する垂直方向の力成分とに分けて、更に前後方向、左右方向及び垂直方向の各軸周りにそれぞれ作用するモーメントとして、検出することができる。
As a result, when the upper or lower limbs of the user U move the
実際の運動訓練装置1の使用において、力センサ60が検出する前後方向(Y軸方向)、左右方向(X軸方向)及び垂直方向(XY平面と直交する高さ方向)の力成分は、第1及び/又は第2駆動モータ6、30の回転力と使用者Uが操作部3に及ぼす力との差分、即ち操作部3が使用者Uの上肢又は下肢から受ける抗力として検出される。
When the
上述のように、運動訓練装置1は、第1モータ6及び第2モータ30を制御するための制御部としてのPC70を備える。PC70は、図6に示すように、駆動制御部71と、信号制御部72と、表示制御部73と、メモリ74と、それらを制御管理するための制御CPU75とを備える。
As described above, the
駆動制御部71は、モータ制御部27,31を介して第1モータ6及び第2モータ30に接続され、それらの駆動を制御する。モータ制御部27,30は、PC70の中に組み込んでもよい。信号制御部72は、力センサ60及びエンコーダ6a、30aに接続され、力センサ60及びエンコーダ6a、30aから出力される信号を受信する。表示制御部73は、モニター76に接続され、該モニター76の表示を制御する。メモリ74は、運動訓練装置1を動作させるためのプログラムに加えて、例えば使用者Uの個人データや訓練履歴等の訓練に関するデータを保存する。
The drive control unit 71 is connected to the
制御CPU75は、力センサ60、エンコーダ6a,30a、および不揮発性のメモリ74から入力される情報に基づいて操作部3の速度を求め、駆動制御部71に電流値(出力電流Ii、デューティ)を出力して、第1モータ6及び第2モータ30への電力供給を制御する。
The
なお、本実施形態では、操作部3を取付プレート5を介して第1スライダーブロック4と高さ方向において重複する位置に設け、操作部3の下端が基台2から浮いている状態で固定する態様を示したが、取付プレート5の下面に自由回転するコロなどの摺動部材を設けて基台2上で滑らかに動くようにした上で取付プレート5の下面と基台2とが接触するように構成してもよい。これにより、使用者Uによる下方にかかる力を基台2で受けることができる。また、操作部3を第1スライダーブロック4の上部に取り付けるようにしてもよい。そうすることで操作部3の可動領域がより装置奥側に広げることができる。
In this embodiment, the
次に、本実施形態の運動訓練装置1を含む運動訓練システム1000の動作について説明する。運動訓練装置1により使用者Uが運動訓練を行う際には、例えば、使用者Uが操作部3を掴みその上から訓練指導者が使用者Uの手をとって使用者Uの上肢状況に応じた動作範囲で操作部3を移動させることで、操作部3が辿る軌跡を設定するための軌跡設定モードと、使用者Uのみが操作部3を掴み軌跡設定モードで設定された軌跡を辿ることで、使用者Uによる操作部3の位置(軌跡)とそのときに操作部3が受ける負荷とを検出するための負荷検出モードと経て、運動訓練モードで行われる。
Next, the operation of the
[運動訓練モード]
まず、運動訓練モードには、使用者Uが自ら軌跡設定モードで設定された軌跡をなぞるように操作部3を移動させる能動訓練モード(アシストモード、トレーニングモード)と、自動的に軌跡を辿る操作部3に引っ張られて運動する受動訓練モード(自動モード)とがある。受動訓練モードは主としてリハビリ中の人を対象とする運動訓練モード、能動訓練モードはリハビリ最終段階の人や健常者を対象とする運動訓練モードとして想定されている。なお、アシストモードは、訓練中に操作部3に適宜アシスト力を作用させて行う能動訓練モードであり、トレーニングモードは、アシストモードのようなアシスト力がない能動訓練モードである。
[Exercise training mode]
First, the exercise training modes include an active training mode (assist mode, training mode) in which the user U moves the
運動訓練システム1000では、これらの各モードの何れかを選択して実行可能である。また、各モードにおいて、それぞれパラメータを設定可能であり、使用者Uに応じて適切な負荷などを設定して運動訓練モードを行うことができる。例えば、前述の特許文献1では、能動訓練モードにおいて、平面運動における静止摩擦を模擬した仮想モデルを介して操作部に発生させるべきX軸方向の速度およびY軸方向の速度を算出してX軸方とY軸方向の駆動モータを制御するようにしている。そして、この仮想モデルのパラメータを変更することで、様々な負荷で能動訓練モードを行えるようにしている。
In the
特許文献1においては、モニターに、例えば運動量や静止摩擦力の大きさに応じて予め定めた幾とおりかの選択子にその説明(例えば、運動量:大、静止摩擦力:中)を加えた画面を表示したり、運動量や静止摩擦力の大きさを調整可能に表したレベルメータを表示したりすることでパラメータの入力を容易にしている。
In
ここで、特許文献1では、静止摩擦を模擬した仮想モデルを使用することで運動訓練を行っているが、運動訓練装置では、更なる訓練効果が得られる装置が求められている。そこで、本実施形態では、運動訓練モードにおいて、操作部3を次のように制御するようにしている。
In
本実施形態の場合も、特許文献1における制御と同様に、PC70の制御CPU75は、信号制御部72により力センサ60及びエンコーダ6a、30aから出力される信号を受信し、駆動制御部71により第1モータ6及び第2モータ30を制御することで、各種運動訓練モードを実行可能である。この際、本実施形態では、静止摩擦力と動摩擦力を模擬したパラメータに加えて、その運動が維持されるような力(例えば、慣性力)を模擬したパラメータを設定可能としている。本実施形態では、その運動が維持されるような力を模擬したパラメータを第1のパラメータ、静止摩擦力と動摩擦力を模擬したパラメータを第2のパラメータとする。このような第1のパラメータ及び第2のパラメータは、トレーニングモードやアシストモードなどの能動訓練モードにおいて好ましく使用できる。なお、第2のパラメータについては、上述の特許文献1に記載の内容と同様であるので、第1のパラメータについて説明する。
In the present embodiment, similar to the control in
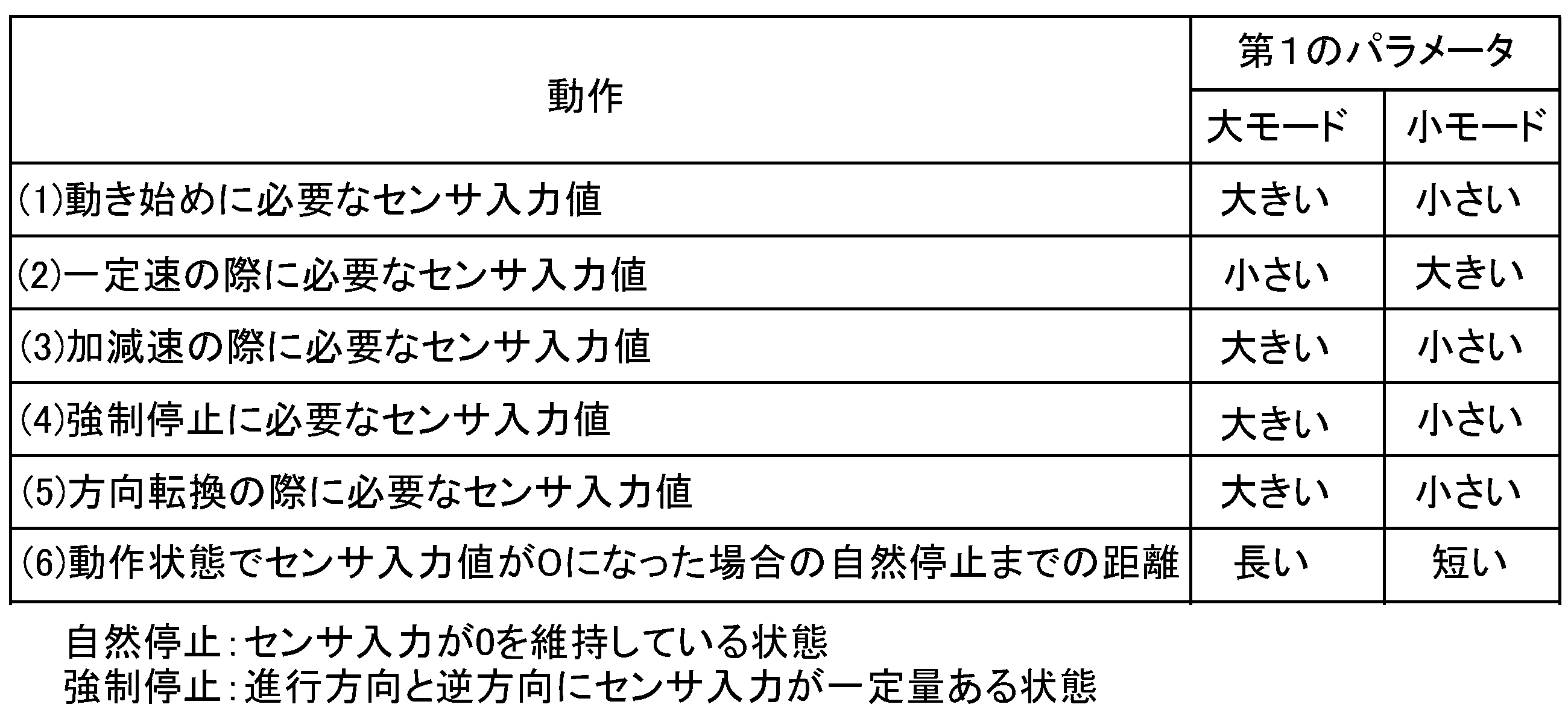
第1のパラメータを説明するために、次の(1)~(6)の動作で、第1モータ6及び第2モータ30がどのように制御されるかを説明する。なお、制御CPU75は、設定される第1パラメータに応じて、第1モータ6及び第2モータ30を制御することで操作部3に発生させる力を変更可能である。
To explain the first parameter, the following operations (1) to (6) will be described to explain how the
(1)操作部3の動き始め
まず、使用者Uが操作部3を動かし始める場合について説明する。即ち、操作部3が静止している状態で、力センサ60が力を検出した場合である。PC70の制御CPU75は、操作部3が停止している状態で、力センサ60がX軸およびY軸方向の力Fx,Fyの合成力FОを検出した場合に、合成力FОと反対方向に合成力F0以下の力が発生するように第1モータ6及び第2モータ30を制御する。
(1) Starting to Move
この制御について、第2のパラメータが固定状態で、第1のパラメータを大きさが異なる2つの値に設定した場合に、操作部3を動かすために必要な力(力センサ60に入力される入力合成力FI)を比較して説明する。なお、以下では、第1のパラメータを2つの値に設定した場合を比較しているが、第1のパラメータは、2つ以上の複数の異なる値に設定可能としても良い。 This control will be described by comparing the force required to move the operation unit 3 (the combined input force F I input to the force sensor 60) when the second parameter is fixed and the first parameter is set to two values of different magnitudes. Note that, although a comparison is made below between the cases where the first parameter is set to two values, the first parameter may be set to two or more different values.
制御CPU75は、第1のパラメータが第1の値に設定された場合(大モード)において、操作部3を動かすために必要な力センサ60に入力されるX軸およびY軸方向の力Fx,Fyの入力合成力FIが第1の力になるように、第1モータ6及び第2モータ30を制御する。一方、制御CPU75は、第1パラメータが第1の値よりも小さい第2の値に設定された場合(小モード)、入力合成力FIが第1の力よりも小さい第2の力になるように、第1モータ6及び第2モータ30を制御する。即ち、制御CPU75は、操作部3を動かし始める場合、第1のパラメータが大きい程、使用者Uが操作部3を動かすために必要な力が大きくなるように、第1モータ6及び第2モータ30を制御する。
When the first parameter is set to a first value (large mode), the
(2)操作部3を一定速度で維持
次に、使用者Uが操作部3を一定速度で動かす場合について説明する。まず、操作部3が入力される合成力F0の方向が変わらずに移動している場合、PC70の制御CPU75は、力センサ60により検出されるX軸およびY軸方向の力Fx,Fyの合成力F0の方向に、合成力F0以下の力が操作部3に発生するように第1モータ6及び第2モータ30を制御する。また、制御CPU75は、操作部3の移動中に、力センサ60により検出されるX軸およびY軸方向の力Fx,Fyの合成力F0がF1からF2に低下した場合には、合成力F0の方向に、F2よりも大きくF1以下の力が操作部3に発生するように第1モータ6及び第2モータ30を制御する。
(2) Maintaining the
このように操作部3が入力される合成力F0の方向が変わらずに、即ち、一定の方向に移動している場合で、操作部3の速度を一定速度に維持する制御について、第2のパラメータが固定状態で、第1のパラメータを大きさが異なる2つの値に設定した場合に、操作部3が一定速度で移動するために必要な力(力センサ60に入力される入力合成力FI)を比較して説明する。
In this manner, when the direction of the composite force F0 input to the
制御CPU75は、第1のパラメータが第1の値に設定された場合(大モード)、操作部3が一定速度で移動するために必要な力センサ60に入力されるX軸およびY軸方向の力Fx,Fyの入力合成力FIが第1の力になるように、第1モータ6及び第2モータ30を制御する。一方、制御CPU75は、第1のパラメータが第1の値よりも小さい第2の値に設定された場合(小モード)、入力合成力FIが第1の力よりも大きい第2の力になるように、第1モータ6及び第2モータ30を制御する。即ち、制御CPU75は、操作部3を一定速度で動かす場合、第1のパラメータが大きい程、使用者Uが操作部3の速度を維持するために必要な力が小さくなるように、第1モータ6及び第2モータ30を制御する。
When the first parameter is set to a first value (large mode), the
(3)操作部3の移動中に加減速
次に、使用者Uが操作部3を加速又は減速する場合について説明する。まず、使用者Uが操作部3を移動中に加速させる場合について説明する。制御CPU75は、操作部3の移動中に、力センサ60により検出されるX軸およびY軸方向の力Fx,Fyの合成力F0がF3からF4に増加した場合には、合成力F0の方向とは反対方向にF4以下の力が操作部3に発生するように第1モータ6及び第2モータ30を制御する。
(3) Acceleration/Deceleration During Movement of
この操作部3の加速時の制御について、第2のパラメータが固定状態で、第1のパラメータを大きさが異なる2つの値に設定した場合に、操作部3の速度を増加させるために必要な力(力センサ60に入力される入力合成力FI)を比較して説明する。
Regarding the control during acceleration of the
制御CPU75は、第1のパラメータが第1の値に設定された場合(大モード)、操作部3の速度を増加させるために必要な力センサ60に入力されるX軸およびY軸方向の力Fx,Fyの入力合成力FIが第1の力になるように、第1モータ6及び第2モータ30を制御する。一方、制御CPU75は、第1のパラメータが第1の値よりも小さい第2の値に設定された場合(小モード)、入力合成力FIが第1の力よりも小さい第2の力になるように、第1モータ6及び第2モータ30を制御する。即ち、制御CPU75は、操作部3を加速させる場合、第1のパラメータが大きい程、使用者Uが操作部3を加速させるために必要な力が大きくなるように、第1モータ6及び第2モータ30を制御する。
When the first parameter is set to a first value (large mode), the
次に、使用者Uが操作部3を移動中に減速させる場合について説明する。制御CPU75は、操作部3の移動中に、力センサ60により検出されるX軸およびY軸方向の力Fx,Fyの合成力F0の方向が第1方向から第2方向に変更された場合には、操作部3に対して第1方向に力が発生するように第1モータ6及び第2モータ30を制御する。ここで、操作部3を減速させる場合とは、第2方向が第1方向と逆方向になる場合である。
Next, a case will be described in which the user U decelerates the
この操作部3の減速時の制御について、第2のパラメータが固定状態で、第1のパラメータを大きさが異なる2つの値に設定した場合に、操作部3の速度を低下させるために必要な力(力センサ60に入力される入力合成力FI)を比較して説明する。
Regarding the control during deceleration of the
制御CPU75は、第1のパラメータが第1の値に設定された場合(大モード)、操作部3の速度を低下させるために必要な力センサ60に入力されるX軸およびY軸方向の力Fx,Fyの入力合成力FIが第1の力になるように、第1モータ6及び第2モータ30を制御する。一方、制御CPU75は、第1のパラメータが第1の値よりも小さい第2の値に設定された場合(小モード)、入力合成力FIが第1の力よりも小さい第2の力になるように、第1モータ6及び第2モータ30を制御する。即ち、制御CPU75は、操作部3を減速させる場合、第1のパラメータが大きい程、使用者Uが操作部3を減速させるために必要な力が大きくなるように、第1モータ6及び第2モータ30を制御する。
When the first parameter is set to a first value (large mode), the
このように、操作部3を加速又は減速させる場合、制御CPU75は、第1のパラメータが大きい程、使用者Uが操作部3を加速又は減速させるために必要な力が大きくなるように、第1モータ6及び第2モータ30を制御する。
In this way, when accelerating or decelerating the
(4)操作部3の強制停止
次に、使用者Uが操作部3の移動を強制的に停止させる場合について説明する。この場合は、上述の操作部3の減速時と同様であり、制御CPU75は、第1のパラメータが大きい程、使用者Uが操作部3を停止させるために必要な力が大きくなるように、第1モータ6及び第2モータ30を制御する。
(4) Forced Stop of
(5)操作部3の方向転換
次に、使用者Uが操作部3の移動中に移動方向を変える場合について説明する。この場合、上述の減速時の動作において説明したように、操作部3の移動中に、力センサ60により検出される合成力F0の方向が第1方向から第2方向に変更された場合であり、制御CPU75は、操作部3に対して第1方向に力が発生するように第1モータ6及び第2モータ30を制御する。
(5) Changing Direction of
この操作部3の方向転換の制御について、第2のパラメータが固定状態で、第1のパラメータを大きさが異なる2つの値に設定した場合に、操作部3の移動方向を変更させるために必要な力(力センサ60に入力される入力合成力FI)を比較して説明する。
Regarding the control of changing the direction of the
制御CPU75は、第1のパラメータが第1の値に設定された場合(大モード)、操作部3の移動方向を変更させるために必要な力センサ60に入力されるX軸およびY軸方向の力Fx,Fyの入力合成力FIが第1の力になるように、第1モータ6及び第2モータ30を制御する。一方、制御CPU75は、第1のパラメータが第1の値よりも小さい第2の値に設定された場合(小モード)、入力合成力FIが第1の力よりも小さい第2の力になるように、第1モータ6及び第2モータ30を制御する。即ち、制御CPU75は、操作部3を方向転換させる場合、第1のパラメータが大きい程、使用者Uが操作部3を方向転換させるために必要な力が大きくなるように、第1モータ6及び第2モータ30を制御する。
When the first parameter is set to a first value (large mode), the
(6)操作部3の移動中に力センサ60への入力が0
次に、使用者Uが操作部3の移動中に力センサ60に入力される力が0になった場合(例えば、手を離した場合)について説明する。制御CPU75は、操作部3の移動中に、力センサ60により検出されるX軸およびY軸方向の力Fx,Fyの合成力F0が0になっても、操作部3の移動が維持される力が操作部3に対して発生するように第1モータ6及び第2モータ30を制御する。
(6) When the input to the
Next, a case will be described where the force input to the
この操作部3の移動中に力センサ60に入力される力が0になった場合の制御について、第2のパラメータが固定状態で、第1のパラメータを大きさが異なる2つの値に設定した場合に、操作部3が停止するまでの移動距離を比較して説明する。
Regarding the control when the force input to the
制御CPU75は、第1のパラメータが第1の値に設定された場合(大モード)、合成力F0が0になってから操作部3が停止するまで合成力F0が0のままである場合の操作部3の移動距離(自然停止するまでの距離)が第1の距離になるように、第1モータ6及び第2モータ30を制御する。一方、制御CPU75は、第1のパラメータが第1の値よりも小さい第2の値に設定された場合(小モード)、合成力F0が0になってから操作部3が自然停止するまでの移動距離が第1の距離よりも短い第2の距離になるように、第1モータ6及び第2モータ30を制御する。即ち、制御CPU75は、操作部3の移動中に力センサ60に入力される力が0になった場合、第1のパラメータが大きい程、操作部3が自然停止するまでの移動距離が長くなるように、第1モータ6及び第2モータ30を制御する。
When the first parameter is set to a first value (large mode), the
上述の(1)~(6)の各動作条件における、第1のパラメータが大きい場合(大モード)と、小さい場合(小モード)とで、その動作を達成するために必要なセンサ入力値(力センサ60に入力される入力合成力FI)の大きさや操作部3の移動距離をまとめたものを、表1に示す。
なお、第1のパラメータと第2のパラメータの両方を設定すると、例えば、操作部3が移動している場合には、次のような制御となる。即ち、制御CPU75は、操作部3が移動している場合に、その移動方向に移動する方向に作用する第1方向の力と、移動方向と逆方向に作用する第2方向の力の合力が操作部3に発生するように、第1モータ6及び第2モータ30を制御する。ここで、第1方向の力は、主として第1のパラメータによる影響が大きく、第2方向の力は、主として第2のパラメータによる影響が大きい。
When both the first parameter and the second parameter are set, for example, when the
[具体例]
次に、第1のパラメータが第1の値と、第1の値よりも小さい第2の値の何れかに設定し、更に第2のパラメータを第3の値と、第3の値よりも小さい第4の値の何れかに設定した場合に、力センサ60が検出する合成力の大きさ及び方向、更には操作部3の軌跡がどのようになるかを具体的に説明する。
[Specific examples]
Next, a specific explanation will be given of the magnitude and direction of the resultant force detected by the
まず、本実施形態では、図7に示すように、モニター76に、力センサ60により検出される合成力の大きさや方向を示す第1チャートと、位置検出手段としてのエンコーダ6a、30aにより検出された操作部3の位置を軌跡と共に示す第2チャートとを、同じ時系列で表示可能である。
First, in this embodiment, as shown in FIG. 7, a first chart showing the magnitude and direction of the resultant force detected by the
第1チャートは、同一の中心を有し半径が異なる複数の円からなるチャートであり、中心からの周方向の位置が合成力の方向を示し、中心からの距離が合成力の大きさを示すように、力センサ60の検出結果がプロットされる。図7に示す第2チャートは、使用者Uが操作部3を移動させる目標軌跡が円で、この目標軌跡と共に操作部3の位置をその移動軌跡と共に表示するチャートである。この第1チャート及び第2チャートを用いて、上述のように第1のパラメータ及び第2のパラメータを変化させた場合の具体例について説明する。
The first chart is a chart consisting of multiple circles with the same center and different radii, and the detection results of the
[第1のパラメータが大、第2のパラメータが小]
まず、図8(a)、(b)及び図9(a)、(b)を用いて、第1のパラメータが大きく(第1の値)、且つ、第2のパラメータが小さい(第4の値)状態で、使用者Uが操作部3をコントロールできていない場合と、使用者Uが操作部3をコントロールできている場合とを比較して説明する。即ち、第1のパラメータの影響を第2のパラメータに対して大きくした場合の例である。
[First parameter is large, second parameter is small]
8(a), (b) and 9(a), (b) will be used to compare and explain a case where the user U cannot control the
図8(a)、(b)は、使用者Uが操作部3をコントロールできていない場合を示しており、図8(b)に太線で示すように、操作部3が実際に移動した軌跡は、目標軌跡に対してずれている。また、この動作において力センサ60に入力された合成力の大きさ及び方向は、図8(a)に太線で示すような状態となっている。即ち、第1のパラメータを大きくすることで、使用者Uが目標軌跡通りに操作部3をコントロールしにくくなっている状態である。
Figures 8(a) and (b) show a case where the user U is unable to control the
そして、この状態から同じ条件で運動訓練を行い、使用者Uが目標軌跡通りに操作部3をほぼコントロールできた状態が、図9(a)、(b)に示すチャートである。図9(b)に太線で示すように、操作部3の移動した軌跡がほぼ目標軌跡と重なっている。また、この動作において力センサ60に入力された合成力の大きさ及び方向は、図9(a)に太線で示すような状態となっている。
Then, from this state, exercise training is performed under the same conditions, and the state in which the user U is able to control the
[第1のパラメータが小、第2のパラメータが大]
次に、図10(a)、(b)を用いて、第1のパラメータが小さく(第2の値)、且つ、第2のパラメータが大きい(第3の値)状態で、使用者Uが操作部3をコントロールできていない場合と、使用者Uが操作部3をコントロールできている場合とを比較して説明する。即ち、第2のパラメータの影響を第1のパラメータに対して大きくした場合の例である。図10(a)、(b)では、使用者Uが操作部3をコントロールできていない場合を太線で、使用者Uが操作部3をコントロールできている場合を破線で、それぞれ示している。
[First parameter is small, second parameter is large]
Next, with reference to Figures 10(a) and (b), a comparison will be made between a case where the user U cannot control the
第2のパラメータの影響が大きい場合、使用者Uは操作部3に加える力に応じて操作部3を動かすことができるので、第1のパラメータの影響を大きくした場合と比較して操作部3をコントロールし易い。このため、図10(a)、(b)に示すように、破線と実線で大きな差が生じていない。
When the influence of the second parameter is large, the user U can move the
[第1のパラメータが小、第2のパラメータが小]
次に、図11(a)、(b)を用いて、第1のパラメータが小さく(第2の値)、且つ、第2のパラメータも小さい(第4の値)状態について説明する。この場合、使用者Uが操作部3を最もコントロールし易い状態であり、図11(a)、(b)に太線で示すように、使用者Uが操作部3をほぼ目標軌跡通りに移動させることができ、操作部3に加える力の大きさの変化も少ない。
[First parameter is small, second parameter is small]
11A and 11B, a state in which the first parameter is small (second value) and the second parameter is also small (fourth value) will be described. In this state, the user U can most easily control the
[第1のパラメータの影響]
ここで、図8(a)及び図9(a)と図10(a)を比較して、第1のパラメータの影響について説明する。上述のように、第2のパラメータの影響が大きく、第1のパラメータの影響が小さい場合、図10(a)に示すように、使用者Uが操作部3に加える力は大きくなるが、力の大きさに応じて操作部3を移動させることができるため、操作部3のコントロールは比較的容易である。これに対して、第1のパラメータの影響が大きく、第2のパラメータの影響が小さい場合、図8(a)及び図9(a)に示すように、使用者Uが操作部3に加える力の大きさ及び方向は、図10(a)に対して複雑になっている。即ち、第1のパラメータの影響を大きくすることで、使用者Uが操作部3をコントロールしにくくなっていることが分かる。
[Effect of the first parameter]
Here, the influence of the first parameter will be described by comparing FIG. 8(a), FIG. 9(a) and FIG. 10(a). As described above, when the influence of the second parameter is large and the influence of the first parameter is small, as shown in FIG. 10(a), the force applied by the user U to the
以上より、操作部3のコントロール性は、図11(a)、(b)、図10(a)、(b)、図8(a)、(b)及び図9(a)、(b)の順番で低下する。このため、訓練の順番として、例えば、図11(a)、(b)に示した条件から始め、この条件で使用者Uが目標軌跡通りに操作部3をコントロールできたら、次に、図10(a)、(b)の条件で訓練を行う。そして、この条件で使用者Uが目標軌跡通りに操作部3をコントロールできたら、図8(a)、(b)及び図9(a)、(b)の条件で訓練を行うようにすれば、徐々に訓練の難易度を上げることができ、効果的な訓練を行うことができる。
As a result, the controllability of the
[アシストモード]
次に、アシストモードにおいて、第1のパラメータが大きい場合と小さい場合との制御の一例について説明する。アシストモードとは、使用者Uが操作部3を操作している際に、操作部3の位置が所定の領域から外れた場合に、操作部3を所定の領域に戻すアシスト力FAを発生させるように、第1モータ6及び第2モータ30を制御する能動訓練モードの1つである。
[Assist Mode]
Next, an example of control in the assist mode when the first parameter is large and when it is small will be described. The assist mode is one of the active training modes in which, when the user U is operating the
即ち、本実施形態において、PC70の制御CPU75は、使用者Uにより操作される操作部3の位置が、予め設定した所定の領域内にある場合と、所定の領域から外れた場合とで、操作部3の駆動制御を切り替えて行う。所定の領域は、予め設定した目標軌跡上の各点から一定の距離の範囲であり、この一定の距離は、運動訓練の観点から操作部3が実質的に目標軌跡をなぞるように操作されていると見なすことができる大きさに設定される。本実施形態では、PC70は、このようなアシストモードを実行可能である。
That is, in this embodiment, the
具体的には、アシストモードでは、PC70の制御CPU75は、使用者Uにより操作されてXY平面を移動する操作部3の位置が所定の領域内にあることをエンコーダ6a、30aが検出するとき、力センサ60により検出されるX軸およびY軸方向の力Fx,Fyの合成力F0の大きさに基づいた第1速度ベクトルに応じて第1モータ6及び第2モータ30を制御する。即ち、操作部3の位置が所定の領域内にある場合には、アシスト力FAを発生させない。
Specifically, in the assist mode, when the
一方、制御CPU75は、使用者Uにより操作されてXY平面を移動する操作部3の位置が所定の領域から外れていることをエンコーダ6a、30aが検出するとき、第1速度ベクトルと、操作部3を所定の領域内に戻すように作用する第2速度ベクトルとに応じたアシスト方向に操作部3を移動させるアシスト力FAを発生させるように、第1モータ6及び第2モータ30を制御する。
On the other hand, when the
[第1パラメータが小さい場合]
まず、アシストモードにおいて、第1のパラメータが小さい場合の制御について、図12~図15を用いて説明する。ここでは、第2のパラメータの方が第1のパラメータよりも影響が大きいとする。
[When the first parameter is small]
First, the control in the assist mode when the first parameter is small will be described with reference to Figures 12 to 15. Here, it is assumed that the second parameter has a larger effect than the first parameter.
図12は、アシストモードの運動訓練開始時において、操作部3の中心Oが目標軌跡TL上の開始位置TP0に一致するように配置されている場合を示している。所定の領域は、その外郭を目標軌跡TL上の点(図12では、開始位置TP0)を中心とする円TRで表している。操作部3の中心Oから延びる太い矢印FAは、使用者Uから操作部3に加えられる操作力の向きおよび大きさを表しており、その大きさ|FA|と、その向きを表す操作力FAのX軸方向およびY軸方向成分は、力センサ60への入力値として検出される。操作力FAは、同図に示すように、操作部3に発生する速度ベクトルNで表すことができる。
Figure 12 shows a case where, at the start of exercise training in the assisted mode, the center O of the
図12の運動訓練開始時には、操作部3の中心Oが目標軌跡TL上に位置して、目標領域(所定の領域)TR内にあるので、制御CPU75は、使用者Uからの操作力FAに対応する力センサ60への入力値に基づいて、速度ベクトルNに等しい速度ベクトルQを操作部3に発生させるように、第1モータ6及び第2モータ30を制御する。別言すれば、使用者Uの操作を妨げたり操作力FA以外の余計な力を発揮させることなく、操作部3を動かすことができるように、第1モータ6及び第2モータ30を駆動する。
At the start of the exercise training in FIG. 12, the center O of the
図13は、使用者Uの操作により図12の開始位置TP0から移動した操作部3の現在位置LPにおいて、その中心Oが目標軌跡TL上の目標位置TPから逸れているが、目標領域TR内にある場合を示している。この場合、制御CPU75は、図12の場合と同様に、使用者Uからの操作力FAに対応する力センサ60への入力値に基づいて、速度ベクトルNに等しい速度ベクトルQを操作部3に発生させるように、第1モータ6及び第2モータ30を制御する。従って、操作部3は、使用者Uからの操作力FAに対応する力センサ60への入力値に基づいて、使用者Uが動かす向きに移動する。
Figure 13 shows a case where the center O of the current position LP of the
図14は、使用者Uの操作により図13の位置から移動した操作部3の現在位置LPにおいて、その中心Oが目標領域TRから外れた場合を示している。この場合、制御CPU75は、使用者Uからの操作力FAに対応する力センサ60への入力値に基づく速度ベクトルNに加えて、操作部3を目標領域TRに戻す向きに働く速度ベクトルWを発生させるように、第1モータ6及び第2モータ30を制御する。それにより、操作部3には、速度ベクトルNと速度ベクトルWとの合成ベクトルである速度ベクトルQが発生する。従って、操作部3は、使用者Uからの操作力FAに速度ベクトルWを加えて補助することにより、使用者Uが動かす向きを目標領域TRに戻すように調節して移動させることができる。
Figure 14 shows a case where the center O of the
制御CPU75は、操作部3の中心Oが、図14のように目標領域TRから外れた位置から目標領域TRに戻ると、操作力FAを補助する速度ベクトルWを0または小さくして、操作部3の移動速度を遅らせる。それにより、操作部3が目標領域TRを通り過ぎて、反対側の外れた位置まで移動することを未然に回避することができる。
When the center O of the
図15は、操作部3の中心Oが目標領域TR内に戻ったとき、速度ベクトルWを0にした場合を示している。速度ベクトルWによる補助が無くなることにより、操作部3に作用する力及び速度ベクトルは、上述した図13の状態と同じになる。即ち、制御CPU75は、使用者Uからの操作力FAに対応する力センサ60への入力値に基づいて、速度ベクトルNに等しい速度ベクトルQを操作部3に発生させるように、第1モータ6及び第2モータ30を制御し、操作部3は、使用者Uからの操作力FAに対応して、使用者Uが動かす向きに移動する。
Figure 15 shows the case where the velocity vector W is set to 0 when the center O of the
[第1パラメータが大きい場合]
次に、アシストモードにおいて、第1のパラメータが大きい場合の制御について、図12~図14及び図16を用いて説明する。ここでは、第1のパラメータの方が第2のパラメータよりも影響が大きいとする。
[When the first parameter is large]
Next, control in the assist mode when the first parameter is large will be described with reference to Figures 12 to 14 and 16. Here, it is assumed that the first parameter has a greater influence than the second parameter.
第1のパラメータの影響が大きい場合でも、操作部3の現在位置LPにおいて、その中心Oが目標領域TR内にある場合には、基本的な動作は図12~図14と同じである。但し、操作部3の位置が図14の位置から図16に示す位置に戻った場合であっても、図15に示した場合と異なり、速度ベクトルWが残った状態となる。したがって、図14で説明した場合と同様に、操作部3には、速度ベクトルNと速度ベクトルWとの合成ベクトルである速度ベクトルQが発生する。
Even when the influence of the first parameter is large, if the center O of the current position LP of the
即ち、制御CPU75は、アシストモードの実行時に、エンコーダ6a、30aにより検出される操作部3の位置が、アシスト方向にアシスト力FAによって目標領域TRから外れた位置から目標領域TR内に進入した場合に、アシスト方向にアシスト力FA以下の力が操作部に発生するように第1モータ6及び第2モータ30を制御する。したがって、第1のパラメータの影響が大きい場合、使用者Uが操作部3を目標領域TR外から目標領域TR内に戻した場合でも、目標領域TR内に戻す方向に操作部3に作用しているアシスト力FA又はこれよりも小さい力がまだ続いている。このため、使用者Uは、操作部3の位置が目標領域TR内に戻っても、このアシスト力FA又はこれよりも小さい力に抗して操作部3をコントロールする必要があり、上述の図15の場合よりも使用者Uが操作部3を操作しにくい。
That is, when the position of the
また、この目標領域TR内に戻っても続くアシスト力FA又はこれよりも小さい力は、操作部3の位置が目標領域TR内に戻ったら徐々に小さくなるようにする。即ち、速度ベクトルWを徐々に小さくするようにする。この際、設定される第1のパラメータに応じて、この速度ベクトルWが小さくなっていく割合を変えるようにしても良い。
In addition, the assist force F A or a force smaller than this that continues even after returning to the target region TR is gradually reduced when the position of the
ここで、アシストモードにおいて、第2のパラメータが固定状態で、第1のパラメータを大きさが異なる2つの値に設定した場合に、目標領域TR内に戻っても続くアシスト力FA又はこれよりも小さい力が0になるまでの移動距離を比較して説明する。 Here, in the assist mode, when the second parameter is fixed and the first parameter is set to two values of different magnitudes, a comparison will be given of the travel distance until the assist force F A, which continues even after returning to the target region TR, or a force smaller than this becomes 0.
制御CPU75は、第1のパラメータが第1の値に設定された場合(大モード)、操作部3の位置が目標領域TR内に進入してからアシスト力FA以下の力が0になるまでの操作部3の移動距離が第1の距離になるように、第1モータ6及び第2モータ30を制御する。一方、制御CPU75は、第1のパラメータが第1の値よりも小さい第2の値に設定された場合(小モード)、上述の移動距離が第1の距離よりも短い第2の距離になるように、第1モータ6及び第2モータ30を制御する。即ち、制御CPU75は、操作部3の位置が目標領域TR内に戻った場合、第1のパラメータが大きい程、アシスト力FA以下の力が0になるまでの移動距離が長くなるように、第1モータ6及び第2モータ30を制御する。
When the first parameter is set to a first value (large mode), the
本実施形態では、このように第2のパラメータに加えて第1のパラメータを設定して、第1モータ6及び第2モータ30を制御するようにすることで、使用者Uが操作部3を操作しにくい状況を作り出し、訓練の効果を高めることができる。即ち、第2のパラメータの設定だけである場合、第2のパラメータを大きくしても操作部3が動きにくくなる、言い換えれば、重くなるだけであり、使用者Uが力を入れれば動くことになる。このような構成であっても訓練の効果はあるが、更なる訓練効果を得るためには、第2のパラメータだけでは難しい。
In this embodiment, by setting the first parameter in addition to the second parameter in this way and controlling the
そこで、本実施形態では、第1のパラメータを導入することで、第2のパラメータだけでの場合よりも操作部3を操作しにくい状態を作り出し、訓練効果を高めるようにしている。例えば、前述の表1を参照して、第1のパラメータの影響が大きい場合に、操作部3の動き始めから停止までに使用者Uがどのような力を操作部3に加える必要があるかを説明する。
In this embodiment, the first parameter is introduced to create a state in which it is more difficult to operate the
まず、「(1)操作部3の動き始め」で説明したように、操作部3を動かす際には力が必要となる。一方、「(2)操作部3を一定速度で維持」で説明したように、動き始めた操作部3を一定速度で移動させようとした場合、操作部3に加える力を弱める必要がある。即ち、動き出しは力が必要で、動き始めたら力を抜く必要がある。これを第2のパラメータのみの設定で行った場合、動き出しに力は必要であることは同じだが、操作部3を一定速度で動かす場合には、そのまま力を入れ続けて一定速度を維持するようにすればよく、第1のパラメータで実現できるような、力を抜く動作が必要となる状況を作りにくい。
First, as explained in "(1) Starting to move the
また、「(3)操作部3の移動中に加減速」及び「(5)操作部3の方向転換」で説明したように、操作部3を加速又は減速させる場合や操作部3の方向を転換するときは力を入れる必要がある。特に、操作部3を減速させる場合、移動方向と逆方向に力を加える必要がある。これを第2のパラメータのみの設定で行った場合、操作部3に加える力を抜くだけで操作部3が減速することになる。したがって、第1のパラメータを加えることで、減速時の動作についても操作をしにくい状況を作り出すことができる。これは、「(4)操作部3の強制停止」の場合も同様である。
As explained in "(3) Acceleration and deceleration while the
また、操作部3の方向転換を行う場合、第1のパラメータが大きいと、操作部3が方向転換する前の方向に進もうとする力に抗して操作部3の移動方向を変える必要がある。これを第2のパラメータのみの設定で行った場合、操作部3が方向転換する前の方向に進もうとする力は生じない。したがって、第1のパラメータを加えることで、方向転換の動作についても操作をしにくい状況を作り出すことができる。
Furthermore, when changing the direction of the
更に、「(6)操作部3の移動中に手を放す」で説明したように、使用者Uが移動中に操作部3に加える力を0にしても、操作部3がそのまま移動し続けようとするため、使用者Uは、操作部3の移動を停止させようとした場合、単に力を抜くだけではなく、「(4)操作部3の強制停止」で説明したように、移動方向と逆方向に力を入れる必要がある。これを第2のパラメータのみの設定で行った場合、使用者Uが力を抜けば、何れは操作部3の移動が停止することになり、強制停止させる場合にも第1のパラメータを設定した場合よりも停止させるために必要な力は小さくなる。
Furthermore, as explained in "(6) Releasing the hand while the
このように第1のパラメータを設定することで、操作部3の動きだしから停止までの間に様々な力の加減が必要になり、筋肉のコントロールが難しくなる。したがって、このように第1のパラメータを設定することで、敢えて操作しにくい状況を作り出すことができ、それをコントロールできるように訓練することで、更なる訓練効果を得ることができる。
By setting the first parameters in this way, various amounts of force must be applied from the time the
[他の実施形態]
上述の運動訓練装置1は、例えば、予めPC70に、上述の制御が可能なプログラムがインストールされているが、既に設置されている運動訓練装置や運動訓練システムが備えるコンピュータにこのプログラムをインストールするようにしても良い。即ち、本発明は、上述の運動訓練装置1に用いられるプログラムであっても良い。
[Other embodiments]
In the above-mentioned
例えば、前述の「(2)操作部3を一定速度で維持」の動作に対応するプログラムは、次の2つの工程をコンピュータにより実行させるものである。まず、第1工程では、力センサ60によりX軸およびY軸方向の力Fx,Fyの合成力F0を検出する。第2工程では、操作部3が移動している場合に、第1工程で力センサ60により検出された合成力F0の方向に、合成力F0以下の力が操作部3に発生するように、制御CPU75に第1モータ6及び第2モータ30を制御させる。また、このプログラムに、「(2)操作部3を一定速度で維持」で述べたような第1パラメータを複数に設定した場合の制御をこのプログラムに組み込んでも良い。
For example, a program corresponding to the above-mentioned operation of "(2) Maintaining the
また、「(3)操作部3の移動中に加減速」のうちの減速動作、「(4)操作部3の強制停止」及び「(5)操作部3の方向転換」の動作に対応するプログラムは、次の2つの工程をコンピュータにより実行させるものである。まず、第1工程では、力センサ60によりX軸およびY軸方向の力Fx,Fyの合成力F0を検出する。第2工程では、操作部3の移動中に、第1工程で力センサ60により検出された合成力F0の方向が第1方向から第2方向に変更された場合には、操作部3に対して第1方向に力が発生するように、制御CPU75に第1モータ6及び第2モータ30を制御させる。また、このプログラムに、上述の各動作で述べたような第1パラメータを複数に設定した場合の制御をこのプログラムに組み込んでも良い。
In addition, the program corresponding to the deceleration operation of "(3) accelerating and decelerating while the
また、「(6)操作部3の移動中に力センサ60への入力が0」の動作に対応するプログラムは、次の2つの工程をコンピュータにより実行させるものである。まず、第1工程では、力センサ60によりX軸およびY軸方向の力Fx,Fyの合成力F0を検出する。第2工程では、操作部3の移動中に、第1工程で力センサ60により検出された合成力F0が0になった場合には、合成力F0の方向に操作部3が移動するように、制御CPU75に第1モータ6及び第2モータ30を制御させる。また、このプログラムに、上述の動作で述べたような第1パラメータを複数に設定した場合の制御をこのプログラムに組み込んでも良い。
Also, the program corresponding to the operation of "(6) The input to the
更に、「アシストモード」の動作に対応するプログラムは、次の2つの工程をコンピュータにより実行させるものである。まず、第1工程では、エンコーダ6a、30aにより操作部3の位置を検出する。第2工程では、アシストモードの実行時に、第1工程でエンコーダ6a、30aにより検出された操作部3の位置が、アシスト方向にアシスト力FAによって目標領域TRから外れた位置から目標領域TR内に進入した場合に、アシスト方向にアシスト力FA以下の力が操作部3に発生するように、制御CPU75に第1モータ6及び第2モータ30を制御させる。また、このプログラムに、上述の動作で述べたような第1パラメータを複数に設定した場合の制御をこのプログラムに組み込んでも良い。
Furthermore, a program corresponding to the operation of the "assist mode" causes a computer to execute the following two steps. First, in the first step, the position of the
1・・・運動訓練装置
3・・・操作部
6・・・第1モータ(X軸方向駆動モータ)
6a・・・エンコーダ(位置検出手段)
30・・・第2モータ(Y軸方向駆動モータ)
30a・・・エンコーダ(位置検出手段)
60・・・力センサ
70・・・PC(制御部)
200・・・駆動部
1: Exercise training device 3: Operation unit 6: First motor (X-axis direction drive motor)
6a...Encoder (position detection means)
30: Second motor (Y-axis direction drive motor)
30a...Encoder (position detection means)
60: Force sensor 70: PC (control unit)
200...Drive unit
Claims (3)
X軸およびY軸方向駆動モータを有し、前記操作部をXY平面で駆動する駆動部と、
前記操作部を操作する使用者から前記操作部に作用するX軸およびY軸方向の力Fx,Fyを検出する力センサと、
前記力センサの出力と、設定されたパラメータに応じて、前記X軸およびY軸方向駆動モータを制御する制御部と、
を備え、
前記制御部は、前記操作部が一定の方向に一定速度で移動している場合において、
前記パラメータが第1の値に設定された場合には、前記操作部が前記一定の方向に前記一定速度で移動することを維持するために必要な前記力センサに入力される前記X軸およびY軸方向の力Fx,Fyの入力合成力F I が第1の力になるように、前記X軸およびY軸方向駆動モータを制御し、
前記パラメータが前記第1の値よりも小さい第2の値に設定された場合には、前記入力合成力F I が前記第1の力よりも大きい第2の力になるように、前記X軸およびY軸方向駆動モータを制御する、
ことを特徴とする運動訓練装置。 An operation unit that is movable on the XY plane;
A drive unit having X-axis and Y-axis direction drive motors for driving the operation unit on an XY plane;
a force sensor for detecting forces Fx and Fy in the X-axis and Y-axis directions acting on the operation unit from a user operating the operation unit;
A control unit that controls the X-axis and Y-axis direction drive motors in accordance with an output of the force sensor and set parameters ;
Equipped with
When the operation unit is moving in a constant direction at a constant speed , the control unit
When the parameter is set to a first value, the X-axis and Y-axis direction drive motors are controlled so that a composite input force F I of the X-axis and Y-axis direction forces Fx, Fy, which is input to the force sensor and is necessary to keep the operation unit moving at the constant speed in the constant direction, becomes a first force;
when the parameter is set to a second value smaller than the first value, the X-axis and Y-axis direction drive motors are controlled so that the input resultant force F I becomes a second force larger than the first force.
An exercise training device characterized by:
ことを特徴とする、請求項1に記載の運動訓練装置。 when a resultant force F0 of the forces Fx and Fy in the X-axis and Y-axis directions detected by the force sensor decreases from F1 to F2 during movement of the operation unit, the control unit controls the X-axis and Y-axis direction drive motors so that a force greater than F2 and equal to or less than F1 is generated in the direction of the resultant force F0 on the operation unit.
2. The exercise training device according to claim 1 .
X軸およびY軸方向駆動モータを有し、前記操作部をXY平面で駆動する駆動部と、
前記操作部を操作する使用者から前記操作部に作用するX軸およびY軸方向の力Fx,Fyを検出する力センサと、
前記力センサの出力と、設定されたパラメータに応じて、前記X軸およびY軸方向駆動モータを制御する制御部と、を備えた運動訓練装置に用いられるプログラムであって、
前記パラメータを第1の値と前記第1の値よりも小さい第2の値との何れかに設定する第1工程と、
前記操作部が一定の方向に一定速度で移動している場合において、
前記パラメータが前記第1の値に設定された場合には、前記操作部が前記一定の方向に前記一定速度で移動することを維持するために必要な前記力センサに入力される前記X軸およびY軸方向の力Fx,Fyの入力合成力F I が第1の力になるように、前記制御部に前記X軸およびY軸方向駆動モータを制御させ、
前記パラメータが前記第2の値に設定された場合には、前記入力合成力F I が前記第1の力よりも大きい第2の力になるように、前記制御部に前記X軸およびY軸方向駆動モータを制御させる第2工程と、をコンピュータにより実行させる、
ことを特徴とするプログラム。 An operation unit that is movable on the XY plane;
A drive unit having X-axis and Y-axis direction drive motors for driving the operation unit on an XY plane;
a force sensor for detecting forces Fx and Fy in the X-axis and Y-axis directions acting on the operation unit from a user operating the operation unit;
A program for use in an exercise training device including a control unit that controls the X-axis and Y-axis direction drive motors in accordance with an output of the force sensor and set parameters ,
a first step of setting the parameter to either a first value or a second value smaller than the first value ;
When the operation unit is moving in a constant direction at a constant speed ,
When the parameter is set to the first value, the control unit controls the X-axis and Y-axis direction drive motors so that a resultant input force F I of the X-axis and Y-axis direction forces Fx, Fy, which is input to the force sensor and is necessary to keep the operation unit moving at the constant speed in the constant direction, becomes a first force;
and a second step of causing the control unit to control the X-axis and Y-axis direction drive motors so that the input resultant force F I becomes a second force greater than the first force when the parameter is set to the second value .
A program characterized by:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021059732A JP7616601B2 (en) | 2021-03-31 | 2021-03-31 | Exercise training device and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021059732A JP7616601B2 (en) | 2021-03-31 | 2021-03-31 | Exercise training device and program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022156174A JP2022156174A (en) | 2022-10-14 |
| JP7616601B2 true JP7616601B2 (en) | 2025-01-17 |
Family
ID=83559966
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021059732A Active JP7616601B2 (en) | 2021-03-31 | 2021-03-31 | Exercise training device and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7616601B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102794574B1 (en) * | 2022-11-23 | 2025-04-15 | 울산과학기술원 | Rehabilitation robot system method for controlling rehabilitation robot |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN205459686U (en) | 2016-01-14 | 2016-08-17 | 清华大学 | Rehabilitation training device |
| WO2017213202A1 (en) | 2016-06-08 | 2017-12-14 | 株式会社国際電気通信基礎技術研究所 | Motion teaching system and motion teaching method |
| JP2019097578A (en) | 2017-11-28 | 2019-06-24 | キヤノンファインテックニスカ株式会社 | Motion training device |
| JP2020089623A (en) | 2018-12-07 | 2020-06-11 | キヤノンファインテックニスカ株式会社 | Exercise training equipment |
-
2021
- 2021-03-31 JP JP2021059732A patent/JP7616601B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN205459686U (en) | 2016-01-14 | 2016-08-17 | 清华大学 | Rehabilitation training device |
| WO2017213202A1 (en) | 2016-06-08 | 2017-12-14 | 株式会社国際電気通信基礎技術研究所 | Motion teaching system and motion teaching method |
| JP2019097578A (en) | 2017-11-28 | 2019-06-24 | キヤノンファインテックニスカ株式会社 | Motion training device |
| JP2020089623A (en) | 2018-12-07 | 2020-06-11 | キヤノンファインテックニスカ株式会社 | Exercise training equipment |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022156174A (en) | 2022-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Winfree et al. | A high fidelity ungrounded torque feedback device: The iTorqU 2.0 | |
| US8485996B2 (en) | Method and system for motion improvement | |
| WO1999023399A2 (en) | Improvements for force feedback transmission mechanisms | |
| EP3818513B1 (en) | Motion generator | |
| JP7616601B2 (en) | Exercise training device and program | |
| JP2011059862A (en) | Non-grounded inner force sense presentation device | |
| JP7157980B2 (en) | exercise training device | |
| JP7004549B2 (en) | Exercise training device | |
| JP2022083593A (en) | Exercise training device | |
| JP5238626B2 (en) | Sensory presentation device | |
| US20220175606A1 (en) | Motion training apparatus | |
| JP7610456B2 (en) | Exercise training system, exercise training device, display method and program | |
| JP2022175860A (en) | Motion training device and program | |
| JP7209282B2 (en) | exercise training device | |
| JP7071820B2 (en) | Exercise training device | |
| JP7209281B2 (en) | exercise training device | |
| JP2022175861A (en) | Motion training device and program | |
| JP6723380B2 (en) | System and method for simulating reaction forces from virtual objects | |
| JP2022175862A (en) | Motion training system and program | |
| JP4376712B2 (en) | Operating device | |
| JPH08215429A (en) | Acceleration sensor | |
| JP7157979B2 (en) | exercise training device | |
| JP2022175863A (en) | Motion training system and program | |
| US20220175607A1 (en) | Motion training apparatus | |
| Reed | Specialization in Dyadic Shared Manual Tasks |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240329 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240813 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241011 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7616601 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |