以下、本開示の実施の形態について、図面を参照しながら詳細に説明する。なお、図中の同一または相当部分には同一符号を付してその説明は繰り返さない。
図1は、本開示の実施の形態に従う清掃管理装置が適用される清掃システムの全体構成図である。清掃システムは、建物100内のフロア20(床面)を清掃するためのシステムである。
図1を参照して、清掃システムは、清掃ロボット10と、複数の無線通信機30-1,30-2,30-3・・・と、カメラ32と、サーバ40と、端末60とを備える。サーバ40は「清掃管理装置」の一実施例に対応する。サーバ40は、清掃ロボット10による清掃対象エリアの清掃作業を管理する装置である。
清掃ロボット10は、自律移動型の掃除機である。清掃ロボット10は、バッテリを搭載しており、バッテリに蓄えられた電力を用いて清掃対象のフロア20を走行することができる。清掃ロボット10は、自律的に移動しながら清掃部材を用いてフロア20の清掃を行うことができる。
清掃ロボット10には、無線通信機11が設けられている。無線通信機11は、たとえばBLE(Bluetooth Low Energy、「Bluetooth」は登録商標)通信規格に従う通信方式を用いて、清掃ロボット10の位置を検出するための信号を発信する。BLE通信規格に代えて、UWB(Ultra Wide Band)通信規格等に従う通信方式を用いてもよい。また、無線通信機11は、たとえばLTE(Long Term Evolution)等の無線通信規格に従う通信方式を用いて、清掃ロボット10を識別するためのIDや、清掃ロボット10の清掃の開始/終了を示す信号等をサーバ40へ送信する。
無線通信機30-1,30-2,30-3・・・(以下、包括的に「無線通信機30」と称する場合がある。)は、たとえば建物100の天井35に適当な距離をおいて配置され、清掃ロボット10の無線通信機11と同じ通信規格に従う通信方式を用いて、清掃ロボット10から発信される信号を受信するとともにその受信強度を検知する。各無線通信機30における受信強度から、フロア20における清掃ロボット10の位置を測定することができる。無線通信機30は、清掃ロボット10から受信した信号の受信強度をサーバ40へ出力する。無線通信機30は、壁に設置されてもよい。
カメラ32は、たとえば天井35に配置され、フロア20を含む建物100内を撮像する。カメラ32は、撮像画像を示すデータをサーバ40へ出力する。カメラ32の台数は限定されない。また、カメラ32は、壁に設置されてもよい。
無線通信機30は、建物100内で使用される移動体22に搭載される無線通信機24と同じ通信規格に従う通信方式を用いて、移動体22から発信される信号を受信するとともにその受信強度を検知する。移動体22は、荷物を運搬するために使用されるいわゆる手押し車であり、荷物を積載するための籠、車輪およびハンドル等で構成されている。本例では、人25が移動体22を使用している。
無線通信機24は、たとえば、籠またはハンドルに取り付けられている。無線通信機24は、たとえばBLE通信規格に従う通信方式を用いて、移動体22の位置を検出するための信号を発信する。BLE通信規格に代えて、UWB通信規格等に従う通信方式を用いてもよい。無線通信機30は、無線通信機24から受信した信号の受信強度をサーバ40へ出力する。
カメラ32は、フロア20を含む建物100内を撮像する。カメラ32による撮像画像には、建物100内を通行する人26の画像が含まれている。カメラ32は、撮像画像を示すデータをサーバ40へ出力する。
後述するように、本例においては、無線通信機30を用いて移動体22を使用する人25(移動体22)の移動軌跡を検出するとともに、カメラ32を用いて人26の移動軌跡を検出している。なお、カメラ32を用いて人25および人26の移動軌跡を検出するようにしてもよい。また、人25,26の移動軌跡を特定できるものであればどのような装置を用いてもよい。
サーバ40(CPU41)は、フロア20における清掃範囲を特定する。サーバ40は、後述する手順に従って、フロア20において清掃優先度の高いエリアを決定し、指定期間(指定時間)内に清掃が完了する清掃優先度の高いエリアを、清掃ロボット10に清掃指示を与える指示エリア(清掃範囲)として決定するように構成される。そして、サーバ40は、決定した指示エリア(清掃範囲)を示すデータを清掃ロボット10へ送信する。
端末60は、管理者27が使用する端末である。管理者27は、清掃ロボット10を含む建物100を管理する。端末60は、たとえば、スマートフォン、タブレット端末、ノートパソコン等である。サーバ40は、端末60からログイン可能であり、端末60とはネットワークを介して無線で接続する。
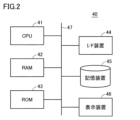
図2は、サーバ40のハードウェア構成を示す図である。図2を参照して、サーバ40は、CPU(Central Processing Unit)41と、RAM(Random Access Memory)42と、ROM(Read Only Memory)43と、I/F(Interface)装置44と、記憶装置45と、表示部として表示装置46とを含んで構成される。CPU41、RAM42、ROM43、I/F装置44、記憶装置45、および表示装置46は、通信バス47を通じて各種データをやり取りする。本実施の形態において、RAM42、ROM43および記憶装置45は、「メモリ」とも総称する。
CPU41は、ROM43に格納されているプログラムをRAM42に展開して実行する。ROM43に格納されているプログラムには、サーバ40によって実行される処理が記述されている。
I/F装置44は、無線通信機30、カメラ32および清掃ロボット10と信号やデータをやり取りするための入出力装置である。I/F装置44は、無線通信機30において受信される信号の受信強度を各無線通信機30から受信する。また、I/F装置44は、カメラ32から撮像画像を示すデータを受信する。さらに、I/F装置44は、LTE等の無線通信規格に従う通信方式を用いて、清掃ロボット10を識別するためのIDや、清掃ロボット10の清掃の開始/終了を示す信号等を清掃ロボット10から受信する。
記憶装置45は、各種情報を記憶するストレージであって、清掃ロボット10の情報、フロア20の情報(床材情報等)、清掃ロボット10の位置情報および移動履歴(軌跡)等を記憶する。記憶装置45は、たとえば、ハードディスクドライブ(HDD:Hard Disk Drive)やソリッドステートドライブ(SSD:Solid State Drive)等である。表示装置46は、各種情報の表示を行う。表示装置46は、たとえば、液晶表示器、ディスプレイである。
端末60は、サーバ40と同様に、CPUと、ROMと、RAMと、記憶部と、通信I/Fとを備え、通信I/Fを介してサーバ40と接続する。また、端末60は、ユーザ(管理者27)からの入力を受け付ける入力部と、各種情報の表示を行う表示部とを備える。入力部は、たとえば、キーボード、マウス、タッチパネルである。表示部は、たとえば、液晶表示器、ディスプレイである。
図3は、清掃システムの構成例を示す図である。図3を参照して、清掃ロボット10は、無線通信機11と、カメラ12と、制御部13と、駆動部14と、バッテリ15と、清掃部材16とを含む。
無線通信機11は、図1で説明したように、たとえばBLE通信規格に従う通信方式を用いて、清掃ロボット10の位置を検出するための信号を発信する。また、無線通信機11は、たとえば、LTE等の無線通信規格に従う通信方式を用いて、清掃ロボット10を識別するためのID、清掃ロボット10による清掃の開始を示す清掃開始信号、および清掃の終了を示す清掃終了信号等の各種情報をサーバ40へ送信する。
カメラ12は、清掃ロボット10の周囲を撮像し、撮像画像を制御部13へ出力する。カメラ12に代えて、清掃ロボット10の周辺に存在する物体と清掃ロボット10との距離を測定するレーザ距離計等が設けられてもよい。
制御部13は、清掃ロボット10による清掃の開始および終了を制御する。そして、制御部13は、カメラ12からの撮像画像および指示エリア(清掃範囲)に基づいて、清掃ロボット10が自律的に移動しながら清掃を行うように駆動部14および清掃部材16を制御する。
駆動部14は、清掃ロボット10が走行するための駆動力を発生する。駆動部14は、たとえば、清掃ロボット10が移動するための車輪と、車輪を駆動するためのモータとを含む。駆動部14(モータ)は、バッテリ15から電力の供給を受けて作動することができる。バッテリ15は、駆動部14その他清掃ロボット10の各機器が作動するための電力を供給する。
清掃部材16は、清掃ロボット10の底面に設けられ、フロア20(床面)の塵埃を吸引するための部材である。清掃部材16は、たとえば、吸込口と、吸込口から塵埃を吸引するための送風機と、吸込口に設けられる回転ブラシと、回転ブラシを駆動するモータとを含んで構成される。
図3を参照して、サーバ40は、入力部52と、制御部50と、記憶装置45と、出力部54と、表示装置46とを含む。
入力部52は、無線通信機30およびカメラ32(これらを「特定部」とも称する)に接続されている。特定部は、清掃対象エリアにおける人の移動を特定する。上述のように、無線通信機30は、建物100内で使用される移動体22に搭載される無線通信機24から受信した信号の受信強度をサーバ40へ出力する。また、カメラ32は、建物100内を通行する人26の画像を含む撮像画像を示すデータをサーバ40へ出力する。入力部52は、無線通信機30により検知された受信強度を示す信号、および、カメラ32による撮像画像を示すデータを受け付け、受け付けた信号を制御部50へ転送する。
制御部50は、これらの情報から後述する人流マップ130を生成し、最終的には指示エリアマップ160を生成する。記憶装置45には、これらのマップの他に、後述する床面基本図110、清掃エリアマップ120等が記憶される。表示装置46は、これらを表示可能である。
制御部50は、作成された指示エリアマップ160を座標データに変換し、生成された座標データを、出力部54を介して清掃ロボット10へ送信する。
清掃ロボット10において、無線通信機11は、サーバ40から受信した座標データを制御部13へ転送する。制御部13は、座標データに示される清掃範囲(指示エリア)に従って清掃ロボット10が自律的に移動しながら清掃を行うように駆動部14および清掃部材16を制御する。
以下、図4以降を用いて各種マップの生成について詳細に説明する。図4は、指示エリアマップ160の生成手順を説明する図である。記憶装置45は、床面基本図110、清掃エリアマップ120、人流情報101、人流マップ130、優先エリアマップ140、優先エリア表210、清掃スピード表211、エリアテーブル220、指示エリアマップ160等を記憶する。
サーバ40(制御部50)は、床面基本図110から清掃エリアマップ120を生成する。図5は、床面基本図110を示す図である。床面基本図110は、予め記憶装置45に記憶されている。
図5に示すように、床面基本図110には、建物100(本実施の形態においては、ショッピングモール等の商業施設)内のフロア20を天井から見た平面図が模式的に示されている。フロア20は、清掃ロボット10の清掃対象となり得る清掃対象エリアである。
建物100には、人26または移動体22(人25が利用)が建物内に出入りするための複数の出入口、および、人26または移動体22が階上または階下に移動するためのエレベータが設けられている。また、フロア20には、複数の店舗310が設置されている。なお、建物100は、商業施設に限らず、工場あるいはオフィス等であってもよい。店舗310も、作業場、会議室あるいは何らかの設備であってもよい。
記憶装置45は、フロアごとの床材に関する情報(床材情報)を記憶している。床材には、たとえば、フロアタイル、クッションフロア、フローリング、カーペット等がある。フロアタイルは、ポリ塩化ビニルまたはセラミック等で作られている。クッションフロアは、塩化ビニル樹脂で作られたシート状の床材である。フローリングは、木材を用いた床材である。カーペットは、表面が繊維の束であるパイルで形成された床材である。また、記憶装置45は、併せて床の色(たとえば、白色)を記憶している。
サーバ40は、取得した床材情報を用いて、フロア20の床材が起毛材料(「起毛素材」とも称する)で形成されているか否かを判定する。たとえば、床材がカーペットである場合、サーバ40は、床材が起毛材料で形成されていると判定する。一方、床材がタイル、クッションフロアまたはフローリングで形成されている場合には、サーバ40は、床材が起毛材料で形成されていない(「非起毛素材である」とも称する)と判定する。
サーバ40は、床面基本図110において、床材が起毛素材である領域(起毛素材330の領域)と、床材が非起毛素材である領域(起毛素材330以外の領域)とを区別して表示する。また、床面基本図110は、床の材質以外にも床の色の情報も内部情報として保持している。本例では、ユーザの指示により、床面基本図110において床の色も確認可能であるものとする。
図6は、清掃エリアマップ120を示す図である。清掃エリアマップ120には、複数のエリアが示される。この複数のエリアは、清掃ロボット10により清掃が実行される単位に清掃対象エリアが区分けされたものである。
この複数のエリアは、屋外に通じる出入口からの距離と、清掃する床の材質と、清掃ロボット10の移動経路と、清掃所要時間とに基づき、区分けされている。この区分けは、管理者27が、清掃ロボット10が清掃作業をしやすいように行えばよい。そして、区分けされた複数のエリアに基づいて、清掃エリアマップ120が作成される。
具体的には、出入口に近いか遠いか、および、床の材質が起毛素材であるか非起毛素材であるかに応じて清掃対象エリアを区分けする。さらに、床色に応じて清掃対象エリアを区分けしてもよい。その際、極力、清掃ロボット10の動作が直線かつ直角となるように、清掃ロボット10の移動経路を考慮して清掃対象エリアを区分けする(たとえば、楕円形ではなく長方形となるように区分け)。清掃ロボット10は、直進が得意であるものの、曲線進行させると清掃ロボット10の位置制御において誤差が出やすくなるためである。
また、各エリアの清掃時間(「清掃所要時間」とも称する)が数分程度(たとえば、5分)となるように清掃対象エリアを区分けする。清掃時間が長くなると、故障や事故、停電などにより途中で清掃ロボット10の清掃が停止した場合に、清掃中のエリアにおいてどこまでが清掃を完了したエリアであるかを特定すること(清掃完了エリアの管理)が難しくなるためである。
図6の清掃エリアマップ120においては、清掃対象エリアが複数のエリアa~z,aaに区分けされている。ここで、出入口に近いエリアとして、エリアc,o,g,wが設定されている。また、床の材質が起毛素材であるエリアとして、エリアh,i,l~n,q,tが設定されている。
また、清掃エリアマップ120は、床の材質以外にも床の色の情報も内部情報として保持しており、ユーザの指示により、清掃エリアマップ120において床の色が確認可能であるものとする。各エリアは、数分程度(たとえば、5分)で清掃が完了し、清掃ロボット10の動作が直線かつ直角となるように区分けされている。
管理者27は、サーバ40の表示装置46あるいは端末60の画面に床面基本図110を表示させ、清掃対象エリアを複数のエリアに区分けしてそれを登録する。サーバ40は、複数のエリアに区分けされたマップを清掃エリアマップ120として生成する。
図4に戻り、サーバ40(制御部50)は、カメラ32および無線通信機24からの情報に基づき、人流情報101を生成する。さらに、サーバ40は、人流情報101に基づき、人流マップ130を生成する。人流マップ130には、清掃対象エリアにおける人流情報101が示される。
サーバ40は、無線通信機24における受信強度から、フロア20における移動体22(人25が使用)の位置を測定する。また、サーバ40は、公知の画像解析技術を用いて、撮像画像からフロア20における人26の位置を測定する。
サーバ40は、移動体22および人26の位置の測定結果に基づいて、移動体22および人26の移動軌跡を検出し、これを人流情報101として記憶装置45に記憶する。サーバ40は、検出された移動体22および人26の移動軌跡(人流情報101)を用いて、フロア20における人の流れ(人流)を表した人流マップ130を生成する。
具体的には、サーバ40は、公知の画像解析技術を用いて、撮像画像から人26を抽出し、抽出した人26の位置の時系列変化を測定することにより、フロア20において人26が移動する流れを検出する。また、サーバ40は、移動体22の無線通信機24から受信した信号の受信強度に基づいて移動体22の位置を測定し、測定した移動体22の位置の時系列変化を測定することにより、フロア20において移動体22が移動する流れを検出する。そして、サーバ40は、検出された人26および移動体22が移動する流れを人流情報101として記憶する。そして、人流情報101を用いて人流マップ130を生成する。サーバ40は、生成した人流マップ130を記憶装置45に格納する。
図7は、人流マップ130を示す図である。図7には、図5と同様に、建物100内のフロア20を天井から見た平面図が模式的に示されている。図7中に太線で示されたライン(「人流」とも称する)320は、人26または移動体22の移動軌跡(動線)を示している。ライン(人流)320は、人26または移動体22が出入口、エレベータおよび店舗310の間を移動する様子を表している。
図4に戻り、サーバ40は、清掃エリアマップ120と人流マップ130とに基づき、優先エリアマップ140を生成する。優先エリアマップ140は、清掃エリアマップ120に人流マップ130を重ね合わせたマップである。サーバ40は、生成した優先エリアマップ140を記憶装置45に格納する。
図8は、優先エリアマップ140を示す図である。複数のエリアに区分けされた清掃エリアマップ120に、人流マップ130のライン(人流)320が重ね合わされて、優先エリアマップ140が生成される。
図4に戻り、サーバ40は、優先エリアマップ140と優先エリア表210と清掃スピード表211とに基づき、エリアテーブル220を生成する。サーバ40は、生成したエリアテーブル220を記憶装置45に格納する。
図9は、優先エリア表210を示す図である。優先エリア表210は、清掃優先度(単に「優先度」とも称する)を決定するための表である。清掃優先度は数値で示され、数値が小さいほど清掃優先度が高い。
ショッピングモール等の建物において、上記のような自律移動型の清掃ロボット10による自動清掃を実施する場合には、指定された時間内で清掃を完了可能な清掃範囲(「指示エリア」とも称する)を特定する必要がある。特に、人の往来がない時間帯(たとえば、夜間)等の限られた時間内で効率よく清掃作業を実施する必要があるため、建物利用者にとって重要な部分を重点的に清掃するように清掃範囲(指示エリア)を決定することが求められる。建物利用者にとって重要な部分とは、たとえば、塵埃等の汚れが溜まりやすい場所あるいは塵埃等の汚れが目立ちやすい場所等の、建物利用者からのクレームが多発しそうな場所である。
人が歩くと、屋外から靴に付着した土や衣服に付着した埃など床に落ちて、床が汚れやすくなる。つまり、人流が多い場所は汚れが溜まりやすくなるという特徴がある。また、出入口に近い場所ほど、床に粉塵が落ちやすく、汚れが溜まりやすい。床材がカーペットのような起毛素材である場合には汚れが目立ちにくいが、床材が非起毛素材(石材など)である場合には汚れが目立ちやすくなる。また、床色が白色である場合には汚れが目立ちやすいが、白色以外の色(白と黒の中間色である灰色等)である場合は汚れが目立ちにくい。なお、本実施の形態では、汚れが目立ちやすい色として「白色」を例示したが、これに限らず、建物利用者にとって汚れが目立ちやすいと感じる色(たとえば、白色に近い淡い色等)であればどのような色であってもよい。
本実施の形態においては、上述のように建物利用者にとって重要な部分(塵埃等の汚れが溜まりやすい場所あるいは塵埃等の汚れが目立ちやすい場所等)について、清掃優先度が高くなるように構成される。
サーバ40は、優先エリアマップ140に設定された情報に基づき、複数のエリアにおける清掃優先度を決定する。サーバ40は、清掃優先度に応じて、複数のエリアのうち指定時間内に清掃が完了するエリアを、清掃ロボット10に清掃指示を与える指示エリア(清掃範囲)として決定する。出力部54は、清掃ロボット10に対して清掃指示を送信する。サーバ40の表示装置46あるいは端末60の画面において、清掃エリアマップ120に指示エリアを反映させた指示エリアマップ160を表示可能である。
サーバ40は、出入口からの距離と、床の色と、床の材質と、人流情報101とに基づき、清掃優先度を決定する。具体的には、出入口に近い場合、床色が白い場合、床材が非起毛素材である場合、人流が多い場合に清掃優先度が高くなるように、優先エリア表210が規定されている。優先エリア表210の値は、管理者27が建物の特徴により適宜変更するようにしてもよい。
優先エリア表210において、床色による汚れの目立ちやすさに応じた値が規定されている。床色が「白」である場合は、1が設定される。床色が「白以外」である場合(たとえば、灰色等)は、1.5が設定される。床色が「白」である場合は、床色が「白以外」である場合よりも汚れが目立ちやすいと認識され、小さい値が設定される(優先度が高くなる)。
優先エリア表210において、床材による汚れの目立ちやすさに応じた値が規定されている。床材が「非起毛(非起毛素材)」である場合は、1が設定される。床材が「起毛(起毛素材)」である場合は、2が設定される。床材が「非起毛」である場合は、床材が「起毛」である場合よりも汚れが目立ちやすいと認識され、小さい値が設定される(優先度が高くなる)。
優先エリア表210において、出入口からの近さに応じた値が規定されている。出入口から近い場合は1が設定され、出入口から遠い場合は3が設定され、中程度である場合は2が設定される。つまり、出入口から近いほど小さい値が設定される(優先度が高くなる)。
優先エリア表210において、人流量に応じた値が規定されている。人流量が多い場合は1が設定され、人流量が少ない場合は3が設定され、中程度である場合は2が設定される。つまり、人流量が多いほど小さい値が設定される(優先度が高くなる)。
なお、上述の優先エリア表210の設定は、あくまで一例である。建物利用者から見て、汚れが目立つと想定される場合に優先度が高くなるようになればどのようなものであってもよい。床色については、汚れが目立つものを複数色用意し、色ごとに数値を設定するようにしてもよい。また、床材についても、「起毛」、「非起毛」以外の分類方法(たとえば、表面の光沢等)で数値を設定するようにしてもよい。
図10は、エリアテーブル220を示す図である。エリアテーブル220には、各エリアに対応した面積(m2)、床色による汚れの目立ちやすさ、床材による汚れの目立ちやすさ、出入口からの近さ、人流量、清掃優先度(優先度)が規定される。
エリアテーブル220における各値(優先度等)は、優先エリアマップ140(図8参照)から読み取った各エリアの情報に、事前に設定登録された優先エリア表210(図9参照)の情報を当てはめることで算出される。
たとえば、優先エリアマップ140における各エリアの広さから、エリアaの面積=20.00m2、エリアbの面積=45.48m2、エリアcの面積=42.36m2とそれぞれ算出される。各面積は、複数のエリアに区分けする際に管理者27が設定登録してもよいし、清掃エリアマップ120の図面情報から自動的に算出するようにしてもよい。
優先エリアマップ140において設定されている各エリアの床色の設定および優先エリア表210から、エリアテーブル220において、床色による汚れの目立ちやすさが設定される。優先エリアマップ140において、エリアa~eの床色は白色に設定されているため、優先エリア表210に基づき、床色による汚れの目立ちやすさ=1.0に設定される。優先エリアマップ140において、エリアf~iの床色は白以外の色に設定されているため、優先エリア表210に基づき、床色による汚れの目立ちやすさ=1.5に設定される。
優先エリアマップ140において設定されている各エリアの床材の設定および優先エリア表210からから、エリアテーブル220において、床材による汚れの目立ちやすさが算出される。優先エリアマップ140において、エリアa~gの床材は非起毛素材に設定されているため、優先エリア表210に基づき、床材による汚れの目立ちやすさ=1に設定される。優先エリアマップ140において、エリアh,iの床材は起毛素材に設定されているため、優先エリア表210に基づき、床材による汚れの目立ちやすさ=2に設定される。
優先エリアマップ140における各エリアの出入口からの近さおよび優先エリア表210から、エリアテーブル220において、出入口からの近さが設定される。たとえば、優先エリアマップ140において、エリアcは出入口から近いため、1が設定され、エリアaは出入口から遠いため、3が設定され、エリアbはその中間程度であるため、2が設定される。
優先エリアマップ140における各エリアの人流量および優先エリア表210から、エリアテーブル220において、人流量が設定される。たとえば、優先エリアマップ140において、エリアaは人流が全くないため、3が設定され、エリアcは出入口での人の出入りが頻繁にあるため(ライン(人流)320による軌跡が多いため)、1が設定され、エリアbは中程度であるため、2が設定される。
以上のように算出あるいは設定された、各エリアに対応した面積(m2)、床色による汚れの目立ちやすさ、床材による汚れの目立ちやすさ、出入口からの近さ、および人流量は、エリアテーブル220に設定される。
さらに、各エリアに対応した床色による汚れの目立ちやすさ、床材による汚れの目立ちやすさ、出入口からの近さ、および人流量から、清掃優先度(優先度)が算出される。具体的には、優先度=床色による汚れの目立ちやすさ×床材による汚れの目立ちやすさ×出入口からの近さ×人流量により算出される。
たとえば、エリアaにおいて、床色による汚れの目立ちやすさ=1.0、床材による汚れの目立ちやすさ=1、出入口からの近さ=3、人流量=3である。このため、エリアaの優先度=1×1×3×3=9と算出される。同様に、エリアbの優先度=1×1×2×2=4と算出される。同様に、エリアcの優先度=1×1×1×1=1と算出される。以上のように算出された優先度は、エリアテーブル220に設定される。
なお、上記の清掃優先度の算出方法はあくまで一例である。上記のように各値を掛け合わせて清掃優先度を算出してもよいし、各値を足し合わせて清掃優先度を算出してもよいし、それ以外の方法で清掃優先度を算出してもよい。
図11は、清掃スピード表211を示す図である。清掃スピード表211には、床材に対応した清掃ロボット10の清掃スピード(分/m2)が設定されている。清掃スピード表211は、記憶装置45に予め記憶されている。図11に示すように、床材が非起毛素材である場合は、清掃ロボット10の清掃スピードは0.10分/m2である。床材が起毛素材である場合は、清掃ロボット10の清掃スピードは0.14分/m2である。
図12は、エリアテーブル220aにおける清掃時間(清掃所要時間)を説明する図である。サーバ40は、複数のエリアの各々の清掃所要時間を、床の材質と床の面積とを用いて算出する。サーバ40は、清掃優先度が高い順に清掃ロボット10が清掃を実行した場合に、エリア間の移動時間を加味した清掃所要時間の累積値が指定時間内になるように指示エリアを決定する。
ここでは、まず、エリアテーブル220(図10参照)を優先度の高い順に並べ替えて、エリアテーブル220aのようにする。ここで、「優先度が高い」とは、優先度の値が小さいことを意味する。
たとえば、エリアcの優先度=1であり、優先度が最も高いため、1番目をエリアcのデータとする。エリアgの優先度=3であり、優先度が2番目に高いため、2番目をエリアcのデータとする。このようにして、エリアテーブル220aにおいて、エリアc,g,b,d,f,a,e,h,iの順にデータが並べ替えられている。
次に、エリアテーブル220(220a)の面積および清掃スピード表211を用いて、清掃時間(分)を求める。たとえば、エリアcの面積=42.36m2であり、床材は非起毛素材であるため、エリアcの清掃時間=4.24(分)(=42.36(面積)×0.10(非起毛素材での清掃スピード))が算出される。同様に、エリアgの清掃時間=2.12分(=21.22×0.10)、エリアbの清掃時間=4.55分(=45.48×0.10)等が算出される。算出された清掃時間は、エリアテーブル220に設定される。なお、累積時間については、図14を用いて後述する。
図4に戻り、サーバ40は、エリアテーブル220において管理者27によってエリアが選択された場合、指示エリアマップ160を生成する。サーバ40は、生成した指示エリアマップ160を記憶装置45に格納する。
管理者27は、サーバ40の表示装置46あるいは端末60の画面に、清掃エリアマップ120(図6参照)を表示させることができる。そして、表示された複数のエリアa~z,aaのうち、エリアを選択して清掃対象とするエリアを絞りこむことができる。なお、優先エリアマップ140(図8参照)を表示してエリアを選択するようにしてもよい。
図13は、エリア選択がされた状態を示す図である。たとえば、管理者27は、エリアa~iを清掃対象として選択したとする。図13に示すように、清掃エリアマップ120aには、選択されたエリアa~iのみが表示されている。選択されたエリアa~iおよび清掃エリアマップ120は、記憶装置45に登録される。なお、管理者27によるエリアの絞り混み作業を行うことなく、全てのエリアを清掃対象とする場合は、エリア選択の手順を実行する必要はない。
図14は、エリアテーブル220bにおける指示エリアの決定を説明する図である。エリアテーブル220bには、上記において選択されたエリアa~iが列挙される。
そして、優先度が高いエリアから順に清掃を行っていった場合の清掃の累積時間が算出される。エリアcを清掃した場合の累積時間=4.24分、エリアc,gを清掃した場合の累積時間=6.36分(=4.24+2.12)、エリアc,g,bを清掃した場合の累積時間=10.91(=4.24+2.12+4.55)等が算出される。算出された清掃時間および累積時間は、エリアテーブル220bに設定される。
さらに、これら複数のエリアのうち指定時間内に清掃が完了するエリアを、清掃ロボット10に清掃指示を与える指示エリアとして決定する。ここで、指定時間は、管理者27が指定した時間である。
本例では、2:40~3:00を指定時間として設定されたとする。この場合、2:40~3:00の20分が清掃許容時間として設定される。
具体的には、エリアテーブル220bにおいて、累積時間が20分(清掃許容時間)以内となるエリアを指示エリアとして決定する。本例では、エリアaの清掃が完了した時点での清掃時間は19.49分であり、エリアeの清掃が完了した時点での清掃時間は22.97分である。このため、清掃許容時間(20分)内に清掃が完了するエリアc,g,b,d,f,aが指示エリアとして決定される。
指示エリアを決定する際、清掃対象となるエリア同士が隣接していない(飛び石である)場合は、清掃ロボット10の移動時間を加味して清掃許容時間を決定する。たとえば、図13に示したように、選択されたエリアa~iは、飛び石のエリアになっておらず、エリア同士は隣接している。このような場合には、清掃許容時間の決定において、清掃ロボット10の移動時間を考慮する必要はない(清掃許容時間は、20分で設定される)。
一方で、たとえば、図13において、エリアdが選択されておらず、エリアcとエリアeが隣接していない(飛び石である)状態になっていたとする。この場合、エリアcの清掃後にエリアeを清掃しようとしたとき、エリアcからエリアeへの移動時間が余分にかかることになる。
このため、エリアcからエリアeへの移動において、エリアdを通過する時間を清掃許容時間から減算し、これを新たな清掃許容時間として設定する。清掃ロボット10が清掃を行わない場合の移動スピードは、0.3m/秒である。エリアcからエリアeへの移動距離は6mであるとする。この場合、エリアdを通過する時間は、0.3m/秒×6m=1.8秒である。この場合、清掃許容時間20分から1.8秒減算した19分58.2秒が新たな清掃許容時間となる。なお、清掃作業は、指示エリアを端から順に清掃するようにしてもよいし、優先度が高いエリア順に実行するようにしてもよい。
図15は、指示エリアマップ160を示す図である。サーバ40は、決定された指示エリアが反映された指示エリアマップ160を生成する。図15に示すように、上記例では、指示エリアとして決定されたエリアa~d,f,gが指示エリアマップ160上に反映されている(エリアe,h,iは表示されない)。
サーバ40は、生成した指示エリアマップ160を記憶装置45に格納する。また、サーバ40は、生成した指示エリアマップ160を出力する。具体的には、指示エリアマップ160をサーバ40の表示装置46あるいは端末60の画面に表示させることができる。これにより、管理者27は、指示エリアマップ160を確認することができる。
また、サーバ40は、清掃ロボット10に対して、決定された指示エリアを送信する。上記例では、決定された指示エリアa~d,f,gの情報が清掃ロボット10に通知される。これにより、清掃ロボット10は、指定時間において指示エリアを清掃する。本例では、指定時間2:40~3:00において、指示エリアa~d,f,gを清掃する。
次に、サーバ40にて実行される処理についてフローチャートを用いて説明する。図16は、サーバ40により実行される処理の手順の一例を説明するフローチャートである。このフローチャートに示される一連の処理は、フロアごとに実行される。本処理は、上記図4~図15を用いて説明した処理に相当する。
まず、サーバ40は、S101において、床面基本図110(図5参照)を取得する。サーバ40は、S102において、床面基本図110に基づき清掃エリアマップ120(図6参照)を生成する。
サーバ40は、S103において、カメラ32および無線通信機30からの情報を取得する。サーバ40は、S104において、カメラ32および無線通信機30からの情報に基づき人流情報101を生成する。サーバ40は、S105において、人流情報101に基づき人流マップ130(図7参照)を生成する。
サーバ40は、S106において、清掃エリアマップ120および人流マップ130から優先エリアマップ140(図8参照)を生成する。
サーバ40は、S107において、優先エリア表210(図9参照)および清掃スピード表211(図11参照)を取得する。サーバ40は、S108において、優先エリアマップ140と優先エリア表210と清掃スピード表211とに基づき、エリアテーブル220,220a,220b(図10,図12,図14参照)を生成する。これにより、清掃優先度、清掃時間および累積時間が決定される。
サーバ40は、S109において、管理者27が選択したエリア(図13参照)およびエリアテーブル220,220a,220bに基づき、指示エリアを決定した上で、指示エリアマップ160(図15参照)を生成する。本実施の形態の例においては、指定時間(2:40~3:00の20分)内に清掃完了可能な、エリアa~d,f,gが指示エリアとして決定され、この情報が指示エリアマップ160に反映されている。
サーバ40は、S110において、指示エリアマップ160を出力する。これにより、指示エリアマップ160をサーバ40の表示装置46あるいは端末60の画面に表示させることができる。サーバ40は、S111において、清掃ロボット10に対する清掃指示を出力する。これにより、清掃ロボット10は、指定時間において指示エリアを清掃する。
以上説明したように、サーバ40は、出入口からの距離と、床の材質と、人流情報とに基づき清掃優先度の高いエリアを決定し、指定時間内に清掃が完了する清掃優先度の高いエリアを、清掃ロボット10に清掃指示を与える指示エリア(清掃範囲)として決定する。
多数の清掃ロボットを配置できない建物においては、夜間等の限られた期間内では清掃対象エリアの清掃が完了しない場合がある。この場合、建物利用者の目につきやすい場所等において清掃が完了していない場合、建物利用者からのクレームに繋がりやすくなる。このため、汚れが溜まりやすい出入口に近い場所、人流が多い場所(汚れが溜まりやすく人目にもつきやすい)、あるいは、床材が非起毛素材であったり床色が白色であるような汚れが目立ちやすい場所など、建物利用者からのクレームが多発しそうな場所の清掃優先度を高くしている。清掃ロボット10は、建物利用者にとって優先度が高いエリアを指定時間内に清掃することができるため、指定時間内において最大の清掃効果を挙げることができる。これにより、清掃対象エリアにおいて清掃不足による建物利用者の不満を低減することができる。
なお、上述した実施の形態では、自律移動型の清掃ロボットによる清掃作業を行う清掃システムにおける清掃範囲の特定方法について説明したが、本開示に係る清掃範囲特定方法は、作業者による清掃作業を行うために清掃範囲を特定する構成においても適用することが可能である。この場合、作業時間が限定されている場合であっても、優先度が高いエリアの清掃を完了させることができる。
[変形例]
本実施の形態においては、夜間の人の往来がない時間帯(たとえば、2:40~3:00)を指定時間として、指示エリアが決定されるようにした。清掃ロボット10は人を避けながら清掃を行うことができないため、人の往来がある時間帯において清掃ロボット10による清掃作業を実施することは適切ではない。
たとえば、商業ビルでは、閉館後の時間帯(たとえば、営業時間外の22時~翌10時)において、工事業者が改修工事を行っていない時間帯や、警備員が警備を行っていない時間帯や、商品の搬入等を行っていない時間帯を指定時間として設定すればよい。ただし、このようにした場合でも、閉館後の工事等のスケジュールの都合で、十分に清掃時間を確保できない可能性もある。一方で、商業ビルの営業時間内であっても、時間帯や場所によっては人の流れがほぼ発生しない場合もある。このため、本変型例においては、以下のように構成する。
サーバ40は、清掃対象エリアの利用情報および人流情報101に基づき、清掃対象エリアのうち清掃ロボット10が清掃可能な時間帯およびエリアを示す清掃可能情報を抽出する。そして、サーバ40は、営業時間外における指定時間および営業時間内における清掃可能情報を用いて指示エリアを決定する。以下、具体的に説明する。
本変形例に係る指示エリアの決定処理は、図16のS109における指示エリアを決定する処理に相当する。図17は、変形例に係る、サーバ40により実行される指示エリアの決定処理の手順の一例を説明するフローチャートである。
本処理が開始すると、サーバ40は、S201において、営業時間外における指定時間を取得する。本変形例においては、原則、図5~図14を用いて説明した状況と同じであり、以下、異なる点についてのみ説明する。本変形例においては、図13のようなエリア選択が行われ、かつ、営業時間外における指定時間として、2:45~3:00の15分が設定されているとする。
サーバ40は、S202において、清掃対象エリアの利用情報および人流情報101を取得する。利用情報は、管理者27によって設定された情報であって、営業時間内における店舗や店舗を含むエリアの営業情報等を含む。たとえば、フロア20の西側エリアの店舗が全て非営業状態である場合、西側エリアにおいて利用客がいないため、この期間、西側エリアが清掃可能であると判定される。あるいは、店舗の特性から利用客の数を推定してもよい。たとえば、店舗がスーツ売り場であって、平日の昼過ぎはほぼ利用客がいないといった傾向がある場合、この時間帯の周辺エリアを清掃可能と判断するようにしてもよい。
人流情報101は、人流マップ生成のために用いた情報と同じものである。たとえば、図8に表示された人流情報においては、エリアa,e,fにおいてほぼ人流が発生していない。人流情報101は、営業時間内の全ての時間から取得したものであってもよいし、営業時間内の特定の時間帯から取得したものであってもよい。
たとえば、この人流情報101が、14時~16時に取得されたものであった場合、清掃可能な時間帯が14時~16時に設定され、清掃可能なエリアとしてエリアa,e,fが決定される。また、たとえば、人流データにおいて閾値を設け、1分あたりの歩行者が0.3人未満であるエリアを清掃可能なエリアとして決定するようにしてもよい。
サーバ40は、S203において、営業時間内で清掃可能な時間帯およびエリアを清掃可能情報として抽出する。上記例では、14時~16時におけるエリアa,e,fが清掃可能情報として抽出される。
サーバ40は、S204において、営業時間外における指示エリアを決定する。ここでは、上述の図14を用いて説明する。まず、図14のエリアテーブルにおいて、清掃可能情報として抽出されたエリア(上記例では、エリアa,e,f)が除外される。本変形例では、営業時間外における指定時間=15分が設定されているため、エリアa,e,fが除外された上で、15分以内に清掃が完了するエリアc,g,b,d(累計時間14.73分)が営業時間外における指示エリアとして決定される。
サーバ40は、S205において、営業時間内における指示エリアを決定し、本処理を終了する。本変形例では、エリアa,e,fが営業時間外における指示エリアとして決定される。その後の処理は、図16を用いて説明したフローチャートと同様である。
その結果、清掃ロボット10は、たとえば、営業時間外の2:45~3:00においてエリアc,g,b,dの清掃を行い、営業時間内の14時からエリアa,e,fの清掃を行う。
以上のように構成することで、優先度が高いエリアを指定時間内に清掃しつつ、さらに、清掃可能な細切れ時間を自動的に検出して、より広範囲に優先度の高いエリアを清掃することができる。これにより、清掃対象エリアにおいて清掃不足による建物利用者の不満をさらに低減することができる。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明は上記した説明ではなくて請求の範囲によって示され、請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。