JP7379391B2 - シグナリングサブ予測ユニット動きベクトル予測子 - Google Patents
シグナリングサブ予測ユニット動きベクトル予測子 Download PDFInfo
- Publication number
- JP7379391B2 JP7379391B2 JP2020570430A JP2020570430A JP7379391B2 JP 7379391 B2 JP7379391 B2 JP 7379391B2 JP 2020570430 A JP2020570430 A JP 2020570430A JP 2020570430 A JP2020570430 A JP 2020570430A JP 7379391 B2 JP7379391 B2 JP 7379391B2
- Authority
- JP
- Japan
- Prior art keywords
- prediction
- block
- motion
- sub
- prediction unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 515
- 239000013598 vector Substances 0.000 title claims description 250
- 230000011664 signaling Effects 0.000 title description 9
- 238000000034 method Methods 0.000 claims description 101
- 230000015654 memory Effects 0.000 claims description 54
- 230000002123 temporal effect Effects 0.000 claims description 39
- 238000009795 derivation Methods 0.000 claims description 30
- 230000004044 response Effects 0.000 claims description 25
- 238000003860 storage Methods 0.000 claims description 19
- 238000004891 communication Methods 0.000 claims description 17
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 39
- 238000012545 processing Methods 0.000 description 29
- 241000023320 Luma <angiosperm> Species 0.000 description 25
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 description 25
- 238000000638 solvent extraction Methods 0.000 description 25
- 238000013139 quantization Methods 0.000 description 23
- 208000037170 Delayed Emergence from Anesthesia Diseases 0.000 description 19
- 238000005192 partition Methods 0.000 description 19
- 230000006870 function Effects 0.000 description 16
- 238000010586 diagram Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 14
- 230000000007 visual effect Effects 0.000 description 11
- 230000005540 biological transmission Effects 0.000 description 8
- 238000013500 data storage Methods 0.000 description 8
- 230000002457 bidirectional effect Effects 0.000 description 6
- 230000002146 bilateral effect Effects 0.000 description 6
- 238000013138 pruning Methods 0.000 description 6
- 239000000872 buffer Substances 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 238000012935 Averaging Methods 0.000 description 3
- 238000003491 array Methods 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 230000003044 adaptive effect Effects 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000000844 transformation Methods 0.000 description 2
- 241000473391 Archosargus rhomboidalis Species 0.000 description 1
- 230000010267 cellular communication Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000012432 intermediate storage Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 230000006855 networking Effects 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/107—Selection of coding mode or of prediction mode between spatial and temporal predictive coding, e.g. picture refresh
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/527—Global motion vector estimation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
後述されるように、ビデオデコーダ300は、本開示の1つまたは複数の技法を実行するように構成され得る。例えば、ビデオデコーダ300は、受信された符号化されたビデオデータからサブ予測ユニット動きフラグをパースし、サブ予測ユニット動きフラグがアクティブである場合、サブ予測ユニットレベル動き予測候補のリストを導出し、サブ予測ユニット動きフラグがアクティブでない場合、予測ユニットレベル動き予測候補のリストを導出し、選択された動きベクトル予測子を使用して、符号化されたビデオデータを復号し得る。
[0072] 各ブロックについて、動き情報のセットが利用可能であり得る。動き情報のセットは、前方予測方向および後方予測方向についての動き情報を包含する。ここで、前方予測方向および後方予測方向は、現在ピクチャまたはスライスの参照ピクチャリスト0(RefPicList0)および参照ピクチャリスト1(RefPicList1)に対応する2つの予測方向である。「前方向」および「後方向」という用語は、必ずしも幾何学的な意味を有するわけではない。代わりに、それらは、どの参照ピクチャリストに動きベクトルが基づくかを区別するために使用される。前方向予測は、参照リスト0に基づいて形成された予測を意味し、後方向予測は、参照リスト1に基づいて形成された予測を意味する。参照リスト0と参照リスト1との両方が所与のブロックについての予測を形成するために使用されるケースでは、双方向予測と呼ばれる。
[0076] ピクチャ順序カウント(POC:picture order count)が、ピクチャの表示順序を識別するためにビデオコーディング規格で使用される。1つのコーディングされたビデオシーケンス内の2つのピクチャが同じPOC値を有し得るケースがあるが、典型的には、1つのコーディングされたビデオシーケンス内では起こらない。複数のコーディングされたビデオシーケンスが1つのビットストリーム中に存在するとき、POCの値が同じピクチャは、復号順序に関して互いにより近くてもよい。
[0079] 予測ユニット(PU)は、同じ予測情報を共有するサンプルの基本ユニットを指す。インター予測PUでは、予測情報は、動き情報の同じセット、またはPUについての動き情報を導出するための同じ方法であり得る。1つの例では、PUは、HEVCブロック構造におけるものと同じであり得、他のブロック分割構造、四分木+二分木分割、マルチタイプツリー分割などにおける基本ブロックでもあり得る。
[0089] 動き予測候補がサブPUレベルであるかどうかを示すために、シンタックス要素is_sub_pu_motion_flagが最初に使用される。is_sub_pu_motion_flagは、1つのビン(0/1)を使用して2値化され、コンテキストベースのバイナリ算術コーダによってコーディングされ得る。コンテキストは、ブロック分割ツリーにおけるPUサイズ/エリアまたはPU深度に依存し得る。より大きいPUは、より小さいPUよりもサブPUレベル動きベクトル予測を選択するのがより頻繁になる傾向があり得る。コンテキストはまた、空間/時間隣接ブロックからのsub_pu_motion_flagにも依存し得る。現在のPUがサブPU動きを使用する可能性は、隣接ブロックがサブPU動きを有する場合に高くなる。
[0093] PUレベル動き予測候補は、HEVCと同様に、空間または時間隣接コーディングブロックから導出されることができる。HEVCマージモードでは、
[0094] HEVCでは、MV候補リストは、マージモードについては最大で5つの候補を、AMVPモードについては2つの候補のみを包含する。マージ候補は、動き情報のセット、例えば、両方の参照ピクチャリスト(リスト0およびリスト1)に対応する動きベクトルと参照インデックスとを包含し得る。マージ候補がマージインデックスによって識別される場合、参照ピクチャは、現在ブロックの予測のために使用され、ならびに関連する動きベクトルが決定される。
[0099] サブPUレベル動き予測候補は、限定するものではないが、アフィン動き予測、代替時間動きベクトル予測(ATMVP)、空間時間動きベクトル予測(STMVP)、平面動きベクトル予測、パターンマッチ動きベクトル導出(PMVD)等を含むことができる。以下に、これらのサブPUレベル動き予測の例を例示する。しかしながら、いくつかの変形形態または他のサブPUレベル動き予測を追加することもできる。
[0101] 4パラメータアフィン動き予測方法では、ブロックの動きベクトルフィールドは、数式(1)によって記述される。
[0109] 代替時間動きベクトル予測(ATMVP)方法(または、高度時間動きベクトル予測と呼ばれるときもある)では、時間動きベクトル予測(TMVP)は、現在PUのサブPUから動き情報(動きベクトルおよび参照インデックスを含む)の複数のセットをフェッチすることによって修正される。
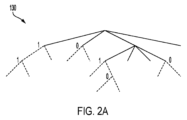
[0111] 空間時間動きベクトル予測方法では、サブPUの動きベクトルは、ラスタ走査順序にしたがって、再帰的に導出される。図7は、STMVPの概念を例示する。4つの4×4サブPU A、B、C、およびDを包含する8×8 PUを考える。現在フレーム中の隣接4×4ブロックは、a、b、c、およびdとラベル付けされる。サブCU Aのための動き導出は、その2つの空間隣接物を識別することによって開始する。第1の隣接物は、サブCU Aの上のN×Nブロックである(ブロックc)。このブロックcが利用可能でない、またはイントラコーディングされている場合、サブCU Aの上の他のN×Nブロックが(ブロックcから開始して左から右に)チェックされる。第2の隣接物は、サブCU Aの左のブロックである(ブロックb)。ブロックbが利用可能でない、またはイントラコーディングされている場合、サブCU Aの左の他のブロックが(ブロックbから開始して上から下に)チェックされる。各リストについての隣接ブロックから得られた動き情報は、所与のリストのための第1の参照フレームにスケーリングされる。次に、サブブロックAの時間動きベクトル予測子(TMVP)が、HEVCにおいて指定されたTMVP導出の同じ手順に従うことによって導出される。ロケーションDにおけるコロケートされたブロックの動き情報がフェッチされ、それに応じてスケーリングされる。最後に、動き情報を取り出してスケーリングした後、すべての利用可能な動きベクトル(最大3つまで)が、各参照リストについて別々に平均化される。平均化された動きベクトルは、現在のサブCUの動きベクトルとして割り当てられる。
[0113] パターンマッチ動きベクトル導出(PMMVD)方法は、フレームレートアップコンバージョン技法に基づく。動き導出プロセスは2つのステップを有する。PUレベルの動き探索が最初に実行され、次いでサブPUレベル動きリファインメントが続く。PUレベルでは、最初の動きベクトルが、バイラテラルマッチング(bilateral matching)またはテンプレートマッチング(template matching)に基づいてPU全体について導出される。最初に、MV候補のリストが生成され、最小のマッチングコストをもたらす候補が、さらなるPUレベルのリファインメントのための開始点として選択される。次いで開始点の周囲でのバイラテラルマッチングまたはテンプレートマッチングに基づく局所的探索が実行され、最小マッチングコストをもたらすMVが、CU全体についてのMVとして得られる。その後に、動き情報は、開始点として導出されたCU動きベクトルを用いてサブPUレベルでさらにリファインされる。
[0117] 平面動きベクトル予測は、以下のように4×4ブロックベースで水平および垂直線形補間を平均化することによって達成される。
1)右下の時間隣接4×4ブロックの動き情報を導出する。
2)右列の隣接4×4ブロックの動きベクトルを、右上の隣接4×4ブロックの動き情報と共に右下の隣接4×4ブロックの導出された動き情報を使用して、R(W,y)=((H-y-1)×AR+(y+1)×BR)/Hとして算出する。
3)下の行の隣接4×4ブロックの動きベクトルを、左下の隣接4×4ブロックの動き情報と共に右下の隣接4×4ブロックの導出された動き情報を使用して、B(x,H)=((W-x-1)×BL+(x+1)×BR)/Wとして算出する。
[0126] 利用可能な場合、サブPUレベル動き予測候補は、アフィン→ATMVP→STMVP→PMMVD→平面(Planar)、というデフォルト順序でリストに挿入される。デフォルト順序は、スライスタイプ、時間レイヤ、アフィン動きモデル、および/または時間動き予測子の利用可能性に基づいて事前定義またはシグナリングされ得る。デフォルト順序はまた、ブロックタイプ、ブロック形状、またはブロックサイズに基づいて異なり得る。サブPUレベル動き予測候補の最大数は、高レベルシンタックスによって示される、利用可能なサブPUレベル動き予測候補の総数および/または所定の数によって決定される。1つの例では、所定の数が3であり、かつアフィン、ATMVP、STMVP、PMMVD、および平面候補のすべてが利用可能である場合、最大数は3である。しかし、アフィンおよびATMVPのみが利用可能である場合、最大数は2である。最大数が0である場合、is_sub_pu_motion_flagは偽(「0」)であると推測され、ビットストリームにおいてシグナリングされない。
1つの例では、アフィン→PMMVD→ATMVP→STMVP→平面、である。
別の例では、PMMVD→アフィン→ATMVP→STMVP→平面、である。
別の例では、2つ以上のアフィン候補が使用され得る。アフィン1→アフィン2→PMMVD→ATMVP→STMVP→平面
または、アフィン1→ATMVP→アフィン2→平面
[0128] 優先的な候補再順序付け
[0129] デフォルトサブPUレベル動き予測候補リストは、隣接コーディングブロックにおけるそれらの発生に基づいて再順序付けされることができる。1つの例では、隣接コーディングブロックにおける発生をより多く有する候補は、リスト中のより低いインデックス位置に入れられる。
[0131] 候補の再順序付けの複雑さを低減するために、優先的な候補再順序付けは、1つまたは複数のサブリストにのみ適用される。例えば、デフォルト順序の候補1-2、3-4は、隣接コーディングブロックにおけるそれらの出現に基づいて別々に再順序付けられる。
[0133] 複雑さを低減するために、サブPU候補リストにプルーニングも部分プルーニングも適用されなくてよい。1つの例では、ATMVP、STMVP、および平面間のプルーニングが適用され得るが、アフィンとサブPU候補の残りとの間にプルーニングは適用されない。
[0136] サブPU動き予測候補の選択は、インデックスの代わりに候補挿入順序にしたがってフラグをイネーブルにすることによってシグナリングされることができる。1つの例では、挿入順序がアフィン→PMMVD→ATMVP→STMVP→平面である場合、シグナリングは表2に示す通りである。
[0157] 変換処理ユニット206は、残差ブロックに1つまたは複数の変換を適用して、変換係数のブロック(本明細書では「変換係数ブロック」と呼ばれる)を生成する。変換処理ユニット206は、残差ブロックに様々な変換を適用して、変換係数ブロックを形成し得る。例えば、変換処理ユニット206は、残差ブロックに、離散コサイン変換(DCT)、方向性変換、カルーネンレーベ変換(KLT)、または概念的に類似した変換を適用し得る。いくつかの例では、変換処理ユニット206は、残差ブロックへの複数の変換、例えば、一次変換と、回転変換などの二次変換とを実行し得る。いくつかの例では、変換処理ユニット206は、残差ブロックに変換を適用しない。
以下に本願の出願当初の特許請求の範囲に記載された発明を付記する。
[C1]
ビデオデータを復号する方法であって、
符号化されたビデオデータを受信することと、
前記符号化されたビデオデータからサブ予測ユニット動きフラグをパースすることと、 前記サブ予測ユニット動きフラグがアクティブであると決定したことに応答して、サブ予測ユニットレベル動き予測候補のリストを導出することと、
前記サブ予測ユニット動きフラグがアクティブでないと決定したことに応答して、予測ユニットレベル動き予測候補のリストを導出することと、
サブ予測ユニットレベル動き予測候補の前記リストまたは予測ユニットレベル動き予測候補の前記リストのいずれかから動きベクトル予測子を選択することと、
前記選択された動きベクトル予測子を使用して、前記符号化されたビデオデータを復号することと、
を備える、方法。
[C2]
前記符号化されたビデオデータは、現在ブロックを含み、サブ予測ユニットレベル動き予測候補の前記リストおよび予測ユニットレベル動き予測候補の前記リストは、前記現在ブロックの隣接ブロックから導出される、C1に記載の方法。
[C3]
前記隣接ブロックは、現在ピクチャ中の前記現在ブロックの空間隣接物、または前にコーディングされたピクチャ中の前記現在ブロックの時間隣接物である、C2に記載の方法。
[C4]
サブ予測ユニットレベル動き予測候補の前記リストまたは予測ユニットレベル動き予測候補の前記リストは、前記隣接ブロックにおける動き予測発生に基づいて少なくとも部分的に順序付けられる、C2に記載の方法。
[C5]
予測ユニット中のピクセルは、第1の動きベクトル情報を共有し、サブ予測ユニット中のピクセルは、第2の動きベクトル情報を共有し、前記第1の動きベクトル情報または前記第2のベクトル情報は、前記選択された動きベクトル予測子から決定される、C1に記載の方法。
[C6]
前記予測ユニットレベル動きベクトル候補リストは、空間隣接候補および時間隣接候補のうちの少なくとも1つを含む、C1に記載の方法。
[C7]
サブ予測ユニットレベル動き予測候補の前記リストは、アフィン動きベクトル予測、代替時間動きベクトル予測(ATMVP)、空間時間動きベクトル予測(STMVP)、平面動きベクトル予測、およびパターンマッチ動きベクトル導出(PMVD)のうちの少なくとも1つを含む、C1に記載の方法。
[C8]
前記サブ予測ユニット動きフラグがアクティブであると決定したことに応答して、マージング候補インデックスを導出することをさらに備え、ここにおいて、前記マージング候補インデックスは、選択されるべき前記動きベクトル予測子を指定する、
C1に記載の方法。
[C9]
ビデオデータを復号するための装置であって、
受信された符号化されたビデオデータを記憶するためのメモリと、
プロセッサと、
を備え、前記プロセッサは、
前記符号化されたビデオデータからサブ予測ユニット動きフラグをパースすることと、
前記サブ予測ユニット動きフラグがアクティブであると決定したことに応答して、サブ予測ユニットレベル動き予測候補のリストを導出することと、
前記サブ予測ユニット動きフラグがアクティブでないと決定したことに応答して、予測ユニットレベル動き予測候補のリストを導出することと、
サブ予測ユニットレベル動き予測候補の前記リストまたは予測ユニットレベル動き予測候補の前記リストのいずれかから動きベクトル予測子を選択することと、
前記選択された動きベクトル予測子を使用して、前記符号化されたビデオデータを復号することと、
を行うように構成されている、装置。
[C10]
前記符号化されたビデオデータは、現在ブロックを含み、サブ予測ユニットレベル動き予測候補の前記リストおよび予測ユニットレベル動き予測候補の前記リストは、前記現在ブロックの隣接ブロックから導出される、C9に記載の装置。
[C11]
前記隣接ブロックは、現在ピクチャ中の前記現在ブロックの空間隣接物、または前にコーディングされたピクチャ中の前記現在ブロックの時間隣接物である、C10に記載の装置。
[C12]
サブ予測ユニットレベル動き予測候補の前記リストまたは予測ユニットレベル動き予測候補の前記リストは、前記隣接ブロックにおける動き予測発生に基づいて少なくとも部分的に順序付けられる、C10に記載の装置。
[C13]
予測ユニット中のピクセルは、第1の動きベクトル情報を共有し、サブ予測ユニット中のピクセルは、第2の動きベクトル情報を共有し、前記第1の動きベクトル情報または前記第2のベクトル情報は、前記選択された動きベクトル予測子から決定される、C9に記載の装置。
[C14]
前記予測ユニットレベル動きベクトル候補リストは、空間隣接候補および時間隣接候補のうちの少なくとも1つを含む、C9に記載の装置。
[C15]
サブ予測ユニットレベル動き予測候補の前記リストは、アフィン動きベクトル予測、代替時間動きベクトル予測(ATMVP)、空間時間動きベクトル予測(STMVP)、平面動きベクトル予測、およびパターンマッチ動きベクトル導出(PMVD)のうちの少なくとも1つを含む、C9に記載の装置。
[C16]
前記プロセッサは、
前記サブ予測ユニット動きフラグがアクティブであると決定したことに応答して、マージング候補インデックスを導出するようにさらに構成され、ここにおいて、前記マージング候補インデックスは、選択されるべき前記動きベクトル予測子を指定する、
C9に記載の装置。
[C17]
ビデオデータを復号するための装置であって、
受信された符号化されたビデオデータを記憶するためのメモリ手段と、
プロセッサ手段と、
を備え、前記プロセッサ手段は、
前記符号化されたビデオデータからサブ予測ユニット動きフラグをパースすることと、
前記サブ予測ユニット動きフラグがアクティブであると決定したことに応答して、サブ予測ユニットレベル動き予測候補のリストを導出することと、
前記サブ予測ユニット動きフラグがアクティブでないと決定したことに応答して、予測ユニットレベル動き予測候補のリストを導出することと、
サブ予測ユニットレベル動き予測候補の前記リストまたは予測ユニットレベル動き予測候補の前記リストのいずれかから動きベクトル予測子を選択することと、
前記選択された動きベクトル予測子を使用して、前記符号化されたビデオデータを復号することと、
を行うように構成されている、装置。
[C18]
前記符号化されたビデオデータは、現在ブロックを含み、サブ予測ユニットレベル動き予測候補の前記リストおよび予測ユニットレベル動き予測候補の前記リストは、前記現在ブロックの隣接ブロックから導出される、C17に記載の装置。
[C19]
前記隣接ブロックは、現在ピクチャ中の前記現在ブロックの空間隣接物、または前にコーディングされたピクチャ中の前記現在ブロックの時間隣接物である、C18に記載の装置。
[C20]
サブ予測ユニットレベル動き予測候補の前記リストまたは予測ユニットレベル動き予測候補の前記リストは、前記隣接ブロックにおける動き予測発生に基づいて少なくとも部分的に順序付けられる、C18に記載の装置。
[C21]
予測ユニット中のピクセルは、第1の動きベクトル情報を共有し、サブ予測ユニット中のピクセルは、第2の動きベクトル情報を共有し、前記第1の動きベクトル情報または前記第2のベクトル情報は、前記選択された動きベクトル予測子から決定される、C17に記載の装置。
[C22]
前記予測ユニットレベル動きベクトル候補リストは、空間隣接候補および時間隣接候補のうちの少なくとも1つを含む、C17に記載の装置。
[C23]
サブ予測ユニットレベル動き予測候補の前記リストは、アフィン動きベクトル予測、代替時間動きベクトル予測(ATMVP)、空間時間動きベクトル予測(STMVP)、平面動きベクトル予測、およびパターンマッチ動きベクトル導出(PMVD)のうちの少なくとも1つを含む、C17に記載の装置。
[C24]
前記プロセッサ手段は、
前記サブ予測ユニット動きフラグがアクティブであると決定したことに応答して、マージング候補インデックスを導出するようにさらに構成され、ここにおいて、前記マージング候補インデックスは、選択されるべき前記動きベクトル予測子を指定する、
C17に記載の装置。
[C25]
実行されたときに、
符号化されたビデオデータを受信することと、
前記符号化されたビデオデータからサブ予測ユニット動きフラグをパースすることと、
前記サブ予測ユニット動きフラグがアクティブであると決定したことに応答して、サブ予測ユニットレベル動き予測候補のリストを導出することと、
前記サブ予測ユニット動きフラグがアクティブでないと決定したことに応答して、予測ユニットレベル動き予測候補のリストを導出することと、
サブ予測ユニットレベル動き予測候補の前記リストまたは予測ユニットレベル動き予測候補の前記リストのいずれかから動きベクトル予測子を選択することと、
前記選択された動きベクトル予測子を使用して、前記符号化されたビデオデータを復号することと、
を備える方法を、1つまたは複数のプロセッサに実行させる命令を記憶した、非一時的コンピュータ可読記憶媒体。
[C26]
前記符号化されたビデオデータは、現在ブロックを含み、サブ予測ユニットレベル動き予測候補の前記リストおよび予測ユニットレベル動き予測候補の前記リストは、前記現在ブロックの隣接ブロックから導出される、C25に記載の媒体。
[C27]
前記隣接ブロックは、現在ピクチャ中の前記現在ブロックの空間隣接物、または前にコーディングされたピクチャ中の前記現在ブロックの時間隣接物である、C26に記載の媒体。
[C28]
サブ予測ユニットレベル動き予測候補の前記リストまたは予測ユニットレベル動き予測候補の前記リストは、前記隣接ブロックにおける動き予測発生に基づいて少なくとも部分的に順序付けられる、C26に記載の媒体。
[C29]
予測ユニット中のピクセルは、第1の動きベクトル情報を共有し、サブ予測ユニット中のピクセルは、第2の動きベクトル情報を共有し、前記第1の動きベクトル情報または前記第2のベクトル情報は、前記選択された動きベクトル予測子から決定され、
前記予測ユニットレベル動きベクトル候補リストは、空間隣接候補および時間隣接候補のうちの少なくとも1つを含み、
サブ予測ユニットレベル動き予測候補の前記リストは、アフィン動きベクトル予測、代替時間動きベクトル予測(ATMVP)、空間時間動きベクトル予測(STMVP)、平面動きベクトル予測、およびパターンマッチ動きベクトル導出(PMVD)のうちの少なくとも1つを含む、C25に記載の媒体。
[C30]
前記方法は、
前記サブ予測ユニット動きフラグがアクティブであると決定したことに応答して、マージング候補インデックスを導出することをさらに備え、ここにおいて、前記マージング候補インデックスは、選択されるべき前記動きベクトル予測子を指定する、
C25に記載の媒体。
Claims (13)
- ビデオデータを復号する方法であって、
符号化されたビデオデータを受信することと、
第1のブロックが予め定められた値より大きいことに基づいて、前記符号化されたビデオデータから第1のサブ予測ユニット動きフラグをパースすることと、ここにおいて、前記第1のサブ予測ユニット動きフラグは、ブロックレベルにおいて受信され、前記第1のブロックに適用可能であり、
動き情報がサブ予測ユニット動きに基づき生成されることを示す前記第1のサブ予測ユニット動きフラグがアクティブであると決定したことに応答して、
サブ予測ユニットレベル動き予測候補の第1のリストを導出することと、前記サブ予測ユニットレベル動き予測候補は、前記第1のブロックの少なくとも1つのサブブロック内のサブ予測ユニットレベル動き推定に適用可能であり、
サブ予測ユニットレベル動き予測候補の前記第1のリストから、第1の動きベクトル予測子を示すサブブロックマージインデックスを復号することと、
前記第1の動きベクトル予測子を使用して、前記第1のブロックの前記少なくとも1つのサブブロックを復号することと、
第2のブロックが前記予め定められた値より大きいことに基づいて、前記符号化されたビデオデータから第2のサブ予測ユニット動きフラグをパースすることと、ここにおいて、前記第2のサブ予測ユニット動きフラグは、前記ブロックレベルにおいて受信され、前記第2のブロックに適用可能であり、
前記第2のサブ予測ユニット動きフラグがアクティブでないと決定したことに応答して、
予測ユニットレベル動き予測候補の第2のリストを導出することと、前記予測ユニットレベル動き予測候補は、前記第2のブロックの予測ユニットに適用可能であり、と、
予測ユニットレベル動き予測候補の前記第2のリストから、第2の動きベクトル予測子を示す予測ユニットマージインデックスを復号することと、ここにおいて、前記予測ユニットマージインデックスは、前記サブブロックマージインデックスとは異なるシンタックス要素であり、
前記第2の動きベクトル予測子を使用して、前記第2のブロックの前記予測ユニットを復号することと、
を備える、方法。 - 前記符号化されたビデオデータは、前記第1のブロックと前記第2のブロックとを含み、
サブ予測ユニットレベル動き予測候補の前記第1のリストは、前記第1のブロックの第1の隣接ブロックから導出され、
予測ユニットレベル動き予測候補の前記第2のリストは、前記第2のブロックの第2の隣接ブロックから導出される、
請求項1に記載の方法。 - 前記第1の隣接ブロックは、現在ピクチャ中の前記第1のブロックの空間隣接物、または前にコーディングされたピクチャ中の前記第1のブロックの時間隣接物である、請求項2に記載の方法。
- サブ予測ユニットレベル動き予測候補の前記第1のリストまたは予測ユニットレベル動き予測候補の前記第2のリストは、前記第1の隣接ブロックまたは前記第2の隣接ブロックにおける動き予測発生に基づいて少なくとも部分的に順序付けられる、請求項2に記載の方法。
- 前記予測ユニットレベル動き候補の前記第2のリストは、空間隣接候補および時間隣接候補のうちの少なくとも1つを含む、請求項1に記載の方法。
- サブ予測ユニットレベル動き予測候補の前記第1のリストは、、代替時間動きベクトル予測(ATMVP)、空間時間動きベクトル予測(STMVP)、平面動きベクトル予測、およびパターンマッチ動きベクトル導出(PMVD)のうちの少なくとも1つを含む、請求項1に記載の方法。
- ビデオデータを復号するための装置であって、
符号化されたビデオデータを記憶するためのメモリと、
前記メモリと通信するプロセッサと、
を備え、前記プロセッサは、
前記符号化されたビデオデータを受信することと、
第1のブロックが予め定められた値より大きいことに基づいて、前記符号化されたビデオデータから第1のサブ予測ユニット動きフラグをパースすることと、ここにおいて、前記第1のサブ予測ユニット動きフラグは、ブロックレベルにおいて受信され、前記第1のブロックに適用可能であり、
動き情報がサブ予測ユニット動きに基づき生成されることを示す前記第1のサブ予測ユニット動きフラグがアクティブであると決定したことに応答して、
サブ予測ユニットレベル動き予測候補の第1のリストを導出することと、前記サブ予測ユニットレベル動き予測候補は、前記第1のブロックの少なくとも1つのサブブロック内のサブ予測ユニットレベル動き推定に適用可能であり、
サブ予測ユニットレベル動き予測候補の前記第1のリストから、第1の動きベクトル予測子を示すサブブロックマージインデックスを復号することと、
前記第1の動きベクトル予測子を使用して、前記第1のブロックの前記少なくとも1つのサブブロックを復号することと、
第2のブロックが前記予め定められた値より大きいことに基づいて、前記符号化されたビデオデータから第2のサブ予測ユニット動きフラグをパースすることと、ここにおいて、前記第2のサブ予測ユニット動きフラグは、前記ブロックレベルにおいて受信され、前記第2のブロックに適用可能であり、
前記第2のサブ予測ユニット動きフラグがアクティブでないと決定したことに応答して、
予測ユニットレベル動き予測候補の第2のリストを導出することと、前記予測ユニットレベル動き予測候補は、前記第2のブロックの予測ユニットに適用可能であり、
予測ユニットレベル動き予測候補の前記第2のリストから、第2の動きベクトル予測子を示す予測ユニットマージインデックスを復号することと、ここにおいて、前記予測ユニットマージインデックスは、前記サブブロックマージインデックスとは異なるシンタックス要素であり、
前記第2の動きベクトル予測子を使用して、前記第2のブロックの前記予測ユニットを復号することと、
を行うように構成された、装置。 - 前記符号化されたビデオデータは、前記第1のブロックと前記第2のブロックとを含み、
サブ予測ユニットレベル動き予測候補の前記第1のリストは、前記第1のブロックの第1の隣接ブロックから導出され、
予測ユニットレベル動き予測候補の前記第2のリストは、前記第2のブロックの第2の隣接ブロックから導出される、
請求項7に記載の装置。 - 前記第1の隣接ブロックは、現在ピクチャ中の前記第1のブロックの空間隣接物、または前にコーディングされたピクチャ中の前記第1のブロックの時間隣接物である、請求項8に記載の装置。
- サブ予測ユニットレベル動き予測候補の前記第1のリストまたは予測ユニットレベル動き予測候補の前記第2のリストは、前記第1の隣接ブロックまたは前記第2の隣接ブロックにおける動き予測発生に基づいて少なくとも部分的に順序付けられる、請求項8に記載の装置。
- 前記予測ユニットレベル動き候補の前記第2のリストは、空間隣接候補および時間隣接候補のうちの少なくとも1つを含む、請求項7に記載の装置。
- サブ予測ユニットレベル動き予測候補の前記第1のリストは、代替時間動きベクトル予測(ATMVP)、空間時間動きベクトル予測(STMVP)、平面動きベクトル予測、およびパターンマッチ動きベクトル導出(PMVD)のうちの少なくとも1つを含む、請求項7に記載の装置。
- 1つまたは複数のプロセッサによって実行されたときに、請求項1~6のいずれか一項に記載の方法を、前記1つまたは複数のプロセッサに実行させる命令を記憶した、非一時的コンピュータ可読記憶媒体。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862687052P | 2018-06-19 | 2018-06-19 | |
| US62/687,052 | 2018-06-19 | ||
| US16/443,113 | 2019-06-17 | ||
| US16/443,113 US20190387247A1 (en) | 2018-06-19 | 2019-06-17 | Signaling sub-prediction unit motion vector predictor |
| PCT/US2019/037722 WO2019246092A1 (en) | 2018-06-19 | 2019-06-18 | Signaling sub-prediction unit motion vector predictor |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021527999A JP2021527999A (ja) | 2021-10-14 |
| JPWO2019246092A5 JPWO2019246092A5 (ja) | 2022-05-26 |
| JP7379391B2 true JP7379391B2 (ja) | 2023-11-14 |
Family
ID=68839373
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020570430A Active JP7379391B2 (ja) | 2018-06-19 | 2019-06-18 | シグナリングサブ予測ユニット動きベクトル予測子 |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US20190387247A1 (ja) |
| EP (1) | EP3811622A1 (ja) |
| JP (1) | JP7379391B2 (ja) |
| KR (1) | KR20210020908A (ja) |
| CN (1) | CN112534820B (ja) |
| AR (1) | AR115568A1 (ja) |
| AU (1) | AU2019288269B2 (ja) |
| BR (1) | BR112020025982A2 (ja) |
| MX (1) | MX2020013843A (ja) |
| PH (1) | PH12020551952A1 (ja) |
| SG (1) | SG11202011223WA (ja) |
| WO (1) | WO2019246092A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110620929B (zh) * | 2018-06-19 | 2023-04-18 | 北京字节跳动网络技术有限公司 | 没有运动矢量预测截断的选择的运动矢量差精度 |
| CN113163211B (zh) * | 2018-06-30 | 2023-01-03 | Oppo广东移动通信有限公司 | 基于合并模式的帧间预测方法及装置 |
| CN112866720B (zh) * | 2018-07-02 | 2022-02-18 | 华为技术有限公司 | 一种运动矢量预测方法、装置与编解码器 |
| KR20240005178A (ko) | 2018-09-19 | 2024-01-11 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 적응적 움직임 벡터 해상도를 가지는 어파인 모드에 대한 구문 재사용 |
| CN112889269B (zh) * | 2018-10-23 | 2023-10-27 | 腾讯美国有限责任公司 | 视频解码方法及装置 |
| CN113366851A (zh) | 2019-01-31 | 2021-09-07 | 北京字节跳动网络技术有限公司 | 对称运动矢量差编解码模式的快速算法 |
| EP3895429A4 (en) | 2019-01-31 | 2022-08-10 | Beijing Bytedance Network Technology Co., Ltd. | CONTEXT FOR CODE AN ADAPTIVE MOTION VECTOR RESOLUTION IN AFFINE MODE |
| US11375222B2 (en) * | 2019-09-22 | 2022-06-28 | Tencent America LLC | Method and device for video encoding and decoding with interpolation filter flag being consistent with MMVD distances |
| CN115004702A (zh) * | 2019-12-24 | 2022-09-02 | 北京达佳互联信息技术有限公司 | 关于合并候选的运动估计区域 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160227214A1 (en) | 2015-01-30 | 2016-08-04 | Qualcomm Incorporated | Flexible partitioning of prediction units |
| JP2017507543A (ja) | 2014-01-03 | 2017-03-16 | ユニバーシティ−インダストリー コーオペレイション グループ オブ キョンヒ ユニバーシティUniversity−Industry Cooperation Group Of Kyung Hee University | サブ予測ユニット単位の時間的な視点間動き情報の誘導方法及び装置 |
| WO2018061522A1 (ja) | 2016-09-27 | 2018-04-05 | シャープ株式会社 | 動きベクトル生成装置、予測画像生成装置、動画像復号装置、および動画像符号化装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3263960B2 (ja) * | 1991-10-22 | 2002-03-11 | ソニー株式会社 | 動きベクトル符号器および復号器 |
| ATE551036T1 (de) * | 2006-11-24 | 2012-04-15 | Gerold Achim Adamietz | Kondomverpackung |
| WO2013108616A1 (en) * | 2012-01-20 | 2013-07-25 | Panasonic Corporation | Methods and apparatuses for encoding and decoding video using temporal motion vector prediction |
| WO2016078511A1 (en) * | 2014-11-18 | 2016-05-26 | Mediatek Inc. | Method of bi-prediction video coding based on motion vectors from uni-prediction and merge candidate |
| US10560718B2 (en) * | 2016-05-13 | 2020-02-11 | Qualcomm Incorporated | Merge candidates for motion vector prediction for video coding |
-
2019
- 2019-06-17 US US16/443,113 patent/US20190387247A1/en active Pending
- 2019-06-18 MX MX2020013843A patent/MX2020013843A/es unknown
- 2019-06-18 BR BR112020025982-9A patent/BR112020025982A2/pt unknown
- 2019-06-18 CN CN201980040250.9A patent/CN112534820B/zh active Active
- 2019-06-18 AR ARP190101678A patent/AR115568A1/es active IP Right Grant
- 2019-06-18 KR KR1020207035950A patent/KR20210020908A/ko not_active Application Discontinuation
- 2019-06-18 WO PCT/US2019/037722 patent/WO2019246092A1/en active Application Filing
- 2019-06-18 EP EP19735106.7A patent/EP3811622A1/en active Pending
- 2019-06-18 AU AU2019288269A patent/AU2019288269B2/en active Active
- 2019-06-18 JP JP2020570430A patent/JP7379391B2/ja active Active
- 2019-06-18 SG SG11202011223WA patent/SG11202011223WA/en unknown
-
2020
- 2020-11-13 PH PH12020551952A patent/PH12020551952A1/en unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017507543A (ja) | 2014-01-03 | 2017-03-16 | ユニバーシティ−インダストリー コーオペレイション グループ オブ キョンヒ ユニバーシティUniversity−Industry Cooperation Group Of Kyung Hee University | サブ予測ユニット単位の時間的な視点間動き情報の誘導方法及び装置 |
| US20160227214A1 (en) | 2015-01-30 | 2016-08-04 | Qualcomm Incorporated | Flexible partitioning of prediction units |
| JP2018507616A (ja) | 2015-01-30 | 2018-03-15 | クアルコム,インコーポレイテッド | 予測ユニットの柔軟な区分化 |
| WO2018061522A1 (ja) | 2016-09-27 | 2018-04-05 | シャープ株式会社 | 動きベクトル生成装置、予測画像生成装置、動画像復号装置、および動画像符号化装置 |
Non-Patent Citations (1)
| Title |
|---|
| Jianle Chen, Elena Alshina, Gary J. Sullivan, Jens-Rainer Ohm, Jill Boyce,Algorithm Description of Joint Exploration Test Model 7 (JEM 7),JVET-G1001-v1 ,Joint Video Exploration Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11 7th Meeting: Torino,2017年08月19日,pp.i-iv,pp.1-44 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20210020908A (ko) | 2021-02-24 |
| CN112534820B (zh) | 2024-06-28 |
| EP3811622A1 (en) | 2021-04-28 |
| PH12020551952A1 (en) | 2021-08-16 |
| SG11202011223WA (en) | 2021-01-28 |
| AU2019288269B2 (en) | 2023-07-27 |
| US20190387247A1 (en) | 2019-12-19 |
| CN112534820A (zh) | 2021-03-19 |
| AU2019288269A1 (en) | 2020-12-10 |
| BR112020025982A2 (pt) | 2021-03-23 |
| AR115568A1 (es) | 2021-02-03 |
| WO2019246092A1 (en) | 2019-12-26 |
| MX2020013843A (es) | 2021-03-25 |
| JP2021527999A (ja) | 2021-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12052428B2 (en) | Combination of inter-prediction and intra-prediction in video coding | |
| US20220046273A1 (en) | Simplification of history-based motion vector prediction | |
| CN110024403B (zh) | 一种编解码视频数据的方法、装置和计算机可读存储媒体 | |
| US11025903B2 (en) | Coding video data using derived chroma mode | |
| JP7379391B2 (ja) | シグナリングサブ予測ユニット動きベクトル予測子 | |
| JP7474774B2 (ja) | ビデオコーディングにおけるイントラブロックコピーモードのための動きベクトル予測子リスト生成 | |
| CN113196749B (zh) | 用于译码视频数据的方法和设备 | |
| US20200112715A1 (en) | History-based motion vector prediction for inter prediction coding | |
| US20200344482A1 (en) | Simplified local illumination compensation | |
| US10958928B2 (en) | Decoder-side motion vector derivation for video coding | |
| CN112369031A (zh) | 对于视频编译码的波前处理的基于多个历史的非毗邻mvp | |
| US20180199055A1 (en) | Encoding optimization with illumination compensation and integer motion vector restriction | |
| JP2022533664A (ja) | ビデオコーディングのためのマージモードコーディング | |
| CN113170185B (zh) | 用于视频译码的空间-时间运动向量预测模式 | |
| US11064192B2 (en) | Simplification of spatial-temporal motion vector prediction | |
| JP2024508216A (ja) | ビデオコーディングのためのモデルベースの動きベクトル差分導出およびテンプレート照合予測 | |
| JP2024514113A (ja) | ビデオコーディングのためのテンプレートマッチングベースのアフィン予測 | |
| US11528504B2 (en) | Motion vector prediction with motion information collecting buffer | |
| JP2024501154A (ja) | ビデオコーディングのための複数仮説予測 | |
| RU2783333C2 (ru) | Передача в служебных сигналах предиктора вектора движения на основе субъединиц предсказания | |
| CN114009039A (zh) | 视频译码中的时间运动矢量预测候选的推导 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220518 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220518 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20230104 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230627 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230919 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231010 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231101 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7379391 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |