JP7367140B2 - 走査ベースの位置付けを伴う遠隔操作手術システム - Google Patents
走査ベースの位置付けを伴う遠隔操作手術システム Download PDFInfo
- Publication number
- JP7367140B2 JP7367140B2 JP2022122444A JP2022122444A JP7367140B2 JP 7367140 B2 JP7367140 B2 JP 7367140B2 JP 2022122444 A JP2022122444 A JP 2022122444A JP 2022122444 A JP2022122444 A JP 2022122444A JP 7367140 B2 JP7367140 B2 JP 7367140B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- surgical
- operating room
- signature
- surgical system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001356 surgical procedure Methods 0.000 claims description 185
- 230000000694 effects Effects 0.000 claims description 67
- 238000000034 method Methods 0.000 claims description 64
- 230000009471 action Effects 0.000 claims description 2
- 230000000875 corresponding effect Effects 0.000 description 36
- 230000033001 locomotion Effects 0.000 description 30
- 238000010586 diagram Methods 0.000 description 20
- 210000003484 anatomy Anatomy 0.000 description 18
- 230000008569 process Effects 0.000 description 11
- 239000012636 effector Substances 0.000 description 10
- 238000003384 imaging method Methods 0.000 description 9
- 208000002847 Surgical Wound Diseases 0.000 description 7
- 230000003213 activating effect Effects 0.000 description 7
- 238000004458 analytical method Methods 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 230000004044 response Effects 0.000 description 7
- 238000002591 computed tomography Methods 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000002405 diagnostic procedure Methods 0.000 description 4
- 238000010801 machine learning Methods 0.000 description 4
- 238000013500 data storage Methods 0.000 description 3
- 230000036541 health Effects 0.000 description 3
- 238000002595 magnetic resonance imaging Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000011282 treatment Methods 0.000 description 3
- 210000000707 wrist Anatomy 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000003542 behavioural effect Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000008447 perception Effects 0.000 description 2
- 238000011471 prostatectomy Methods 0.000 description 2
- 102100035432 Complement factor H Human genes 0.000 description 1
- 101000737574 Homo sapiens Complement factor H Proteins 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000002068 genetic effect Effects 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 238000012634 optical imaging Methods 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images
























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/32—Surgical robots operating autonomously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/10—Surgical drapes specially adapted for instruments, e.g. microscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
- A61B50/13—Trolleys, e.g. carts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/30—Containers specially adapted for packaging, protecting, dispensing, collecting or disposing of surgical or diagnostic appliances or instruments
- A61B50/33—Trays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/108—Computer aided selection or customisation of medical implants or cutting guides
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
- A61B2034/256—User interfaces for surgical systems having a database of accessory information, e.g. including context sensitive help or scientific articles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
- A61B2034/306—Wrists with multiple vertebrae
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/061—Measuring instruments not otherwise provided for for measuring dimensions, e.g. length
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Human Computer Interaction (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description
本願は、2016年11月11日に出願された米国特許出願第62/421,089号について優先権の利益を主張するものであり、この文献はその全体が参照により本明細書に組み込まれる。
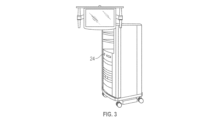
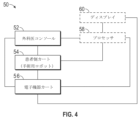
ここで図面を参照すると、いくつかの図を通して同様の参照符号が同様の部分を表している。図1は、低侵襲性遠隔操作手術システム10の平面図であり、このシステムは、典型的には、可動式手術台14に横たわっている患者12に対して低侵襲性の診断的又は外科的処置を行うために使用される。このシステムは、処置中に外科医18が使用するための可動式外科医コンソール16を含む。1人又は複数のアシスタント20も処置に参加することができる。低侵襲性遠隔操作手術システム10は、可動式患者側カート22及び可動式電子機器カート24をさらに含む。いくつかの実施形態では、テーブル14、外科医コンソール16、患者側カート22、及び電子機器カート24は、機動性を提供するホイールに取り付けられる。
図8は、例示的な手術計画ツール800の概略図を示す。一態様では、手術計画ツール800は、電子医療装置記録データベース830とデータ通信する遠隔操作手術システム850を含む。ここに示される遠隔操作手術システム850は、図4に示される遠隔操作手術システムと同様である。一態様では、電子医療記録データベース830は、特定の病院で治療を受けたことのある患者の医療記録を含む。データベース830は、病院の敷地内に配置されたサーバ上に実装することができる。データベース830に含まれる医療記録エントリは、病院のコンピュータからイントラネット・ネットワークを介してアクセスすることができる。あるいはまた、データベース830は、例えば多数のクラウドデータストレージサービスのうちの1つを使用して、病院から離れた場所に配置されたリモートサーバ上に実装することができる。この場合に、データベース830の医療記録エントリは、クラウドサーバに格納され、インターネットアクセスを有するコンピュータによってアクセスすることができる。
場合によっては、医療関係者が、所与の患者に対して行われた過去の外科的処置のビデオ記録を見ることができることが望ましい。一態様では、病状を治療するために以前に第1の外科的処置を受けた患者は、その後、同じ病状の再発を治療するため、又は第1の外科的処置の手術部位の近くに位置する解剖学的構造を治療するために第2の外科的処置を必要とする。一態様では、第1の外科的処置の手術部位のイベントは、手術部位のビデオ記録に取り込まれ、そのビデオ記録は、患者の電子医療記録の一部としてデータベース830に保管された。患者に対して第2の外科的処置を行う前に、医療関係者はデータベース830の検索を行って、患者の以前の外科的処置のビデオ記録を見つけることができる。
一態様では、データベース830は、クラウドデータストレージサービスを使用してリモートサーバ上に実装され、複数のヘルスケア・プロバイダによってアクセス可能である。図8を参照すると、破線で示されるように、手術計画ツール800は、オプションで(破線で示されるような)遠隔操作手術システム850と(破線で示されるような)パーソナルコンピュータ840とを含む。一態様では、遠隔操作手術システム850及びパーソナルコンピュータ820が第1のヘルスケア・プロバイダに位置しており、遠隔操作手術システム850及びパーソナルコンピュータ840が第2のヘルスケア・プロバイダに位置していることを除いて、遠隔操作手術システム850は遠隔操作手術システム850と同様であり、パーソナルコンピュータ840はパーソナルコンピュータ820と同様である。一態様では、第1の患者は、病状について外科的治療を必要とし、そして第1のヘルスケア・プロバイダで遠隔操作手術システム850を使用して外科的処置を受ける。外科的処置のビデオ記録はデータベース830に保管される。その後、第2の患者が、同じ病状についての外科的治療を必要とし、そして第2のヘルスケア・プロバイダで遠隔操作手術システム850を使用して外科的治療を受けることを計画する。第2の患者に対して外科的処置を行う前に、医療関係者は、安全なインターネット接続を介してデータベース830にアクセスし、同様の処置の手術部位のビデオ記録をデータベース830で検索する。一態様では、第2の患者を治療している医療関係者は、第1の患者の身元について知ることなく、データベース830から第1の患者の外科的処置のビデオ記録を検索することができる。このようにして、第1の患者のプライバシーが守られる。一態様では、第1の患者の外科的処置のビデオ記録は、第1の患者を治療した医療関係者によってなされた強調表示及び/又は注釈を含む。
手術計画ツール800は、コンピュータ実行可能コードの形で実装されるパターンマッチング及び解析アルゴリズムを含み得る。一態様では、パターンマッチング及び解析アルゴリズムは、手術計画ツール800の不揮発性メモリ装置に格納され、データベース830に保管されているビデオ記録を解析するように構成される。前述したように、データベース830に保管された各ビデオ記録は、特定のメタデータ情報でタグ付け及び/又は埋め込まれ得る。このメタデータ情報には、患者の年齢、性別等の患者情報、及び患者の健康状態又は病歴を記述する他の情報を含めることができる。さらに、前述したように、メタデータ情報は、医療関係者によってなされた強調表示又は注釈を含むことができる。一態様では、これらの強調表示及び注釈は、ビデオ記録に埋め込まれ、ビデオとともにデータベース830に保管される。
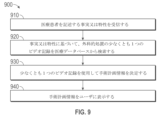
図9は、手術計画ツールを使用する方法900を示す。一態様では、手術計画ツールは、図8の手術計画ツール800と同様である。910において、医療患者を記述する事実又は特性、例えば患者が罹患している病状が医療装置によって受信される。医療装置は、遠隔操作手術システム(例えば、図1の遠隔操作手術システム10又は図4の遠隔操作手術システム50)に配置されたユーザインターフェイスを介して、或いは図2のパーソナルコンピュータ820と同様のパーソナルコンピュータを介してこの事実又は状況を受信することができる。920において、医療装置は、910で受信した事実又は特徴を使用して、外科的処置の少なくとも1つの関連するビデオ記録を医療装置データベースから検索する。930において、医療装置は、ビデオ記録を使用して手術計画情報を決定する。一態様では、手術計画情報は、記録された処置で使用された器具の種類を含む。940において、医療装置は、930で決定された手術計画情報をユーザに表示する。
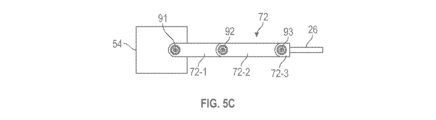
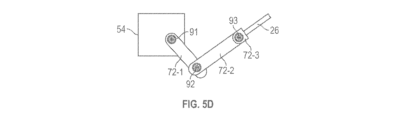
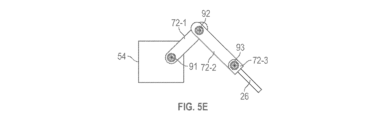
外科的処置中のそれらの複数のサブセグメント72-1、72-2、72-3の位置付けを含む機械的手術用アーム72の位置付けは、例えば外科的処置のタイプ、患者の解剖学的特徴、患者の体の位置、手術室のレイアウト等の様々な要因に依存し得ることが理解されよう。異なる手術は、異なる外科的切開パターンを伴うことがある。患者の解剖学的構造が異なると、外科的処置で使用される切開部同士の間の間隔が異なる可能性がある。異なる患者は、手術中に手術室のテーブルに対して異なる体の位置又は向きを必要とし得る。手術室のレイアウトが異なると、手術室のレイアウトによってもたらされる物理的な制限に対処するために、機械的手術用アームを再配置する必要があり得る。
[実施例1]
遠隔操作手術システムと共に使用するための方法であって、当該方法は、
前記手術システムのセットアップ中に外科的処置のための患者の位置情報を決定するステップと、
前記セットアップ中に前記決定した患者の位置情報とそれぞれの患者の位置シグネチャとの間の一致を判定するステップと、
前記セットアップ中に、前記手術システム内で、前記一致したそれぞれの患者の位置シグネチャに対応する支持アーム制御信号を起動するステップと、を含む、
方法。
[実施例2]
前記手術システムのセットアップ中に前記外科的処置のための患者の解剖学的特徴の位置情報を決定するステップと、
該決定した患者の解剖学的特徴の位置情報とそれぞれの解剖学的特徴の位置シグネチャとの間の一致を判定するステップと、をさらに含み、
前記起動するステップは、前記手術システム内で、前記一致したそれぞれの患者の位置シグネチャと前記一致したそれぞれの解剖学的特徴の位置シグネチャとの組合せに対応する支持アーム制御信号を起動するステップを含む、実施例1に記載の方法。
[実施例3]
起動された制御信号値に対応する位置に機械的支持アームを動かすステップをさらに含む、実施例1に記載の方法。
[実施例4]
起動された制御信号値に対応する、水平軸線の周りの回転位置に機械的支持アームセグメントを動かすステップをさらに含む、実施例1に記載の方法。
[実施例5]
起動された制御信号値に対応する、垂直軸線の周りの回転位置に機械的支持アームセグメントを動かすステップをさらに含む、実施例1に記載の方法。
[実施例6]
起動された制御信号値に対応する、垂直軸線の周りの回転位置に機械的支持アームセグメントを動かすステップと、
起動された制御信号値に対応する、垂直軸線の周りの回転位置に機械的支持アームセグメントを動かすステップと、をさらに含む、実施例1に記載の方法。
[実施例7]
患者の位置情報を決定するステップは、レーザ位置センサで走査するステップを含む、実施例1に記載の方法。
[実施例8]
患者の位置情報を決定するステップは、赤外線位置センサで走査するステップを含む、実施例1に記載の方法。
[実施例9]
外科的処置を行うための前記手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、前記セットアップ中に患者の位置情報を記録し、且つ前記セットアップ中に支持アームの位置情報を記録するステップと、
前記記録した患者の位置情報及び前記記録した支持アームの位置情報に少なくとも部分的に基づいて、それぞれの支持アーム位置に関連付けられるそれぞれの患者の位置シグネチャを決定するステップと、をさらに含む、実施例1に記載の方法。
[実施例10]
外科的処置を行うための前記手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、前記セットアップ中に患者の解剖学的特徴情報を記録し、前記セットアップ中に患者の位置情報を記録し、且つ前記セットアップ中に支持アームの位置情報を記録するステップと、
前記記録した患者の解剖学的特徴情報、前記記録した患者の位置情報、及び前記記録した支持アームの位置情報に少なくとも部分的に基づいて、それぞれの支持アーム位置と関連付けるための、それぞれの患者の解剖学的特徴シグネチャとそれぞれの患者の位置シグネチャとのそれぞれの組合せを決定するステップと、をさらに含む、実施例2に記載の方法。
[実施例11]
遠隔操作手術システムと共に使用するための方法であって、当該方法は、
前記手術システムのセットアップ中に外科的処置のための手術室のレイアウト情報を決定するステップと、
前記セットアップ中に前記決定された手術室のレイアウト情報とそれぞれの手術室のレイアウトシグネチャとの間の一致を判定するステップと、
該一致した手術室のレイアウトシグネチャに対応する手術システムモジュール位置を表す画像を生成するステップと、を含む、
方法。
[実施例12]
前記手術システムのセットアップ中に前記外科的処置のための要員の活動情報を決定するステップと、
該決定した要員の活動情報とそれぞれの要員の活動シグネチャとの間の一致を判定するステップと、をさらに含み、
画像を生成するステップは、前記一致したそれぞれの手術室のレイアウトシグネチャと前記一致したそれぞれの要員の活動シグネチャとの組合せに対応する手術システムモジュール位置を表す画像を生成するステップを含む、実施例11に記載の方法。
[実施例13]
手術室のレイアウト情報を決定するステップは、レーザ位置センサで走査するステップを含む、実施例11に記載の方法。
[実施例14]
手術室のレイアウト情報を決定するステップは、赤外線位置センサで走査するステップを含む、実施例11に記載の方法。
[実施例15]
外科的処置を行うための前記手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、前記セットアップ中に手術室のレイアウト情報を記録し、且つシステムモジュール位置を記録するステップと、
前記記録した手術室のレイアウト情報及び前記記録したシステムモジュールの位置情報に少なくとも部分的に基づいて、それぞれの手術室のレイアウトに関連付けられるそれぞれの手術室のレイアウトシグネチャを決定するステップと、をさらに含む、実施例11に記載の方法。
[実施例16]
外科的処置を行うための前記手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、前記セットアップ中に手術室のレイアウト情報を記録し、前記セットアップ中に要員の活動情報を記録し、且つ前記セットアップ中にシステムモジュールの位置情報を記録するステップと、
前記記録した手術室のレイアウト情報、前記記録した要員の活動情報、及び記録したシステムモジュールの位置情報に少なくとも部分的に基づいて、それぞれのシステムモジュールと関連付けるための、それぞれの手術室のレイアウトシグネチャとそれぞれの要員の活動シグネチャとのそれぞれの組合せを決定するステップと、をさらに含む、実施例12に記載の方法。
[実施例17]
手術用器具及び手術用器具アクチュエータを含む手術システムであって、当該手術システムは、
プロセッサと、
該プロセッサ上で実行可能な命令セットを保持するメモリ装置と、を有しており、
前記命令セットによって当該手術システムに、
当該手術システムのセットアップ中に外科的処置のための患者の位置情報を決定することと、
前記セットアップ中に前記決定した患者の位置情報とそれぞれの患者の位置シグネチャとの間の一致を判定することと、
前記セットアップ中に、当該手術システム内で、一致した患者の位置シグネチャに対応する支持アーム制御信号を起動することと、を含む動作を実行させる、
手術システム。
[実施例18]
前記動作には、
前記手術システムの前記セットアップ中に前記外科的処置のための患者の解剖学的特徴の位置情報を決定することと、
該決定した患者の解剖学的特徴の位置情報とそれぞれの解剖学的特徴の位置シグネチャとの間の一致を判定することとがさらに含まれ、
前記起動することは、当該手術システム内で、前記一致したそれぞれの患者の位置シグネチャと前記一致したそれぞれの解剖学的特徴の位置シグネチャとの組合せに対応する支持アーム制御信号を起動することを含む、実施例17に記載の手術システム。
[実施例19]
前記動作には、起動された制御信号値に対応する位置に機械的支持アームを動かすことがさらに含まれる、実施例17に記載の手術システム。
[実施例20]
前記動作には、起動された制御信号値に対応する、水平軸線の周りの回転位置に機械的支持アームセグメントを動かすことがさらに含まれる、実施例17に記載の手術システム。
[実施例21]
前記動作には、起動された制御信号値に対応する、垂直軸線の周りの回転位置に機械的支持アームセグメントを動かすことがさらに含まれる、実施例17に記載の手術システム。
[実施例22]
前記動作には、
起動された制御信号値に対応する、垂直軸線の周りの回転位置に機械的支持アームセグメントを動かすことと、
起動された制御信号値に対応する、垂直軸線の周りの回転位置に機械的支持アームセグメントを動かすこととがさらに含まれる、実施例17に記載の手術システム。
[実施例23]
患者の位置情報を決定することは、レーザ位置センサで走査することを含む、実施例17に記載の手術システム。
[実施例24]
患者の位置情報を決定することは、赤外線位置センサで走査することを含む、実施例17に記載の手術システム。
[実施例25]
前記動作には、
外科的処置を行うための当該手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、前記セットアップ中に患者の位置情報を記録し、且つ前記セットアップ中に支持アームの位置情報を記録することと、
前記記録した患者の位置情報、及び前記記録した支持アームの位置情報に少なくとも部分的に基づいて、それぞれの支持アーム位置に関連付けられるそれぞれの患者の位置シグネチャを決定することとがさらに含まれる、実施例17に記載の手術システム。
[実施例26]
外科的処置を行うための当該手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、前記セットアップ中に患者の解剖学的特徴情報を記録し、前記セットアップ中に患者の位置情報を記録し、且つ前記セットアップ中に支持アームの位置情報を記録することと、
前記記録した患者の解剖学的特徴情報、前記記録した患者の位置情報、及び前記記録した支持アームの位置情報に少なくとも部分的に基づいて、それぞれの支持アーム位置と関連付けるための、それぞれの患者の解剖学的特徴シグネチャとそれぞれの患者の位置シグネチャとのそれぞれの組合せを決定することと、をさらに含む、実施例18に記載の手術システム。
[実施例27]
手術用器具及び手術用器具アクチュエータを含む手術システムであって、当該手術システムは、
プロセッサと、
該プロセッサ上で実行可能な命令セットを保持するメモリ装置と、を有しており、
前記命令セットによって当該手術システムに、
当該手術システムのセットアップ中に外科的処置のための手術室のレイアウト情報を決定することと、
前記セットアップ中に前記決定した手術室のレイアウト情報とそれぞれの手術室のレイアウトシグネチャとの間の一致を判定することと、
該一致した手術室のレイアウトシグネチャに対応する手術システムモジュール位置を表す画像を生成することと、を含む動作を実行させる、
手術システム。
[実施例28]
当該手術システムのセットアップ中に前記外科的処置のための要員の活動情報を決定することと、
該決定した要員の活動情報とそれぞれの要員の活動シグネチャとの間の一致を判定することと、をさらに含み、
画像を生成することは、前記一致したそれぞれの手術室のレイアウトシグネチャと前記一致したそれぞれの要員の活動シグネチャとの組合せに対応する手術システムモジュール位置を表す画像を生成することを含む、実施例27に記載の手術システム。
[実施例29]
手術室のレイアウト情報を決定することは、レーザ位置センサで走査することを含む、実施例27に記載の手術システム。
[実施例30]
手術室のレイアウト情報を決定するステップは、赤外線位置センサで走査するステップを含む、実施例27に記載の手術システム。
[実施例31]
外科的処置を行うための当該手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、前記セットアップ中に手術室のレイアウト情報を記録し、且つシステムモジュール位置を記録することと、
前記記録した手術室のレイアウト情報、及び記録したシステムモジュールの位置情報に少なくとも部分的に基づいて、それぞれの手術室のレイアウトに関連付けられるそれぞれの手術室のレイアウトシグネチャを決定することと、をさらに含む、実施例27に記載の手術システム。
[実施例32]
外科的処置を行うための当該手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、前記セットアップ中に手術室のレイアウト情報を記録し、前記セットアップ中に要員の活動情報を記録し、且つ前記セットアップ中にシステムモジュールの位置情報を記録することと、
前記記録した手術室のレイアウト情報、前記記録した要員の活動情報、及び前記記録したシステムモジュールの位置情報に少なくとも部分的に基づいて、それぞれのシステムモジュールに関連付けるための、それぞれの手術室のレイアウトシグネチャとそれぞれの要員の活動シグネチャとのそれぞれの組合せを決定することと、をさらに含む、実施例28に記載の手術システム。
Claims (12)
- 方法であって、当該方法は、
手術システムのセットアップのための手術室のレイアウト情報を受信するステップと、
前記手術室のレイアウト情報と手術室のレイアウトシグネチャとの間の一致を判定するステップと、
該一致した手術室のレイアウトシグネチャに少なくとも部分的に基づいて、手術システムの位置付けを表す画像を生成するステップと、を含む、
方法。 - 要員の活動情報を受信するステップと、
該要員の活動情報と要員の活動シグネチャとの間の一致を判定するステップと、をさらに含み、
前記画像を生成するステップは、前記手術室のレイアウト情報と前記手術室のレイアウトシグネチャとの間の一致、及び前記要員の活動情報と前記要員の活動シグネチャとの間の一致の組合せに少なくとも部分的に基づいて、前記手術システムの位置付けを表す前記画像を生成するステップを含む、請求項1に記載の方法。 - 外科的処置情報を受信するステップと、
該外科的処置情報と外科的処置シグネチャとの間の一致を判定するステップと、をさらに含み、
前記画像を生成するステップは、前記手術室のレイアウト情報と前記手術室のレイアウトシグネチャとの間の一致、及び前記外科的処置情報と前記外科的処置シグネチャとの間の一致の組合せに少なくとも部分的に基づいて、前記手術システムの位置付けを表す前記画像を生成するステップを含む、請求項1に記載の方法。 - 要員の活動情報を受信するステップと、
該要員の活動情報と要員の活動シグネチャとの間の一致を判定するステップと、
外科的処置情報を受信するステップと、
該外科的処置情報と外科的処置シグネチャとの間の一致を判定するステップと、をさらに含み、
前記画像を生成するステップは、前記手術室のレイアウト情報と前記手術室のレイアウトシグネチャとの間の一致、前記要員の活動情報と前記要員の活動シグネチャとの間の一致、及び前記外科的処置情報と前記外科的処置シグネチャとの間の一致の組合せに少なくとも部分的に基づいて、前記手術システムの位置付けを表す前記画像を生成するステップを含む、請求項1に記載の方法。 - 前記手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、手術室のレイアウト情報を記録し、手術システムの位置付け情報を記録するステップと、
前記記録した手術室のレイアウト情報、及び前記記録した手術システムの位置付け情報に少なくとも部分的に基づいて、手術室のレイアウトシグネチャを手術室のレイアウト情報と一致させるための1つ又は複数の規則を決定するステップと、をさらに含む、請求項1に記載の方法。 - 前記手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、手術室のレイアウト情報を記録し、要員の活動情報を記録し、及び手術システムの位置付け情報を記録するステップと、
前記記録した手術室のレイアウト情報、前記記録した要員の活動情報、及び前記記録した手術システムの位置付け情報に少なくとも部分的に基づいて、手術室のレイアウトシグネチャを手術室のレイアウト情報と一致させ、且つ要員の活動シグネチャを要員の活動情報と一致させる1つ又は複数の規則を決定するステップと、をさらに含む、請求項2に記載の方法。 - 前記手術システムの1つ又は複数の例のセットアップの多様な発生のそれぞれについて、手術室のレイアウト情報を記録し、外科的処置情報を記録し、及び手術システムの位置付け情報を記録するステップと、
前記記録した手術室のレイアウト情報、前記記録した外科的処置情報、及び前記記録した手術システムの位置付け情報に少なくとも部分的に基づいて、手術室のレイアウトシグネチャを手術室のレイアウト情報と一致させ、且つ手術システムの外科的処置シグネチャを外科的処置情報と一致させる1つ又は複数の規則を決定するステップと、をさらに含む、請求項3に記載の方法。 - 手術用器具及び手術用器具アクチュエータを含む手術システムであって、当該手術システムは、
プロセッサと、
プロセッサ上で実行可能な命令セットを保持するメモリ装置と、を有しており、
前記命令セットを実行することで、当該手術システムに、
手術システムのセットアップのための手術室のレイアウト情報を受信すること、
前記手術室のレイアウト情報と手術室のレイアウトシグネチャとの間の一致を判定すること、及び
該一致した手術室のレイアウトシグネチャに少なくとも部分的に基づいて、手術システムの位置付けを表す画像を生成すること、を含む動作を実行させる、
手術システム。 - 前記動作には、
要員の活動情報を受信すること、及び
前記要員の活動情報と要員の活動シグネチャとの間の一致を判定すること、がさらに含まれ、
前記画像を生成することは、前記手術室のレイアウト情報と前記手術室のレイアウトシグネチャとの間の一致、及び前記要員の活動情報と前記要員の活動シグネチャとの間の一致の組合せに少なくとも部分的に基づいて、前記手術システムの位置付けを表す前記画像を生成することを含む、請求項8に記載の手術システム。 - 前記動作には、
外科的処置情報を受信すること、及び
該外科的処置情報と外科的処置シグネチャとの間の一致を判定すること、がさらに含まれ、
前記画像を生成することは、前記手術室のレイアウト情報と前記手術室のレイアウトシグネチャとの間の一致、及び前記外科的処置情報と前記外科的処置シグネチャとの間の一致の組合せに少なくとも部分的に基づいて、前記手術システムの位置付けを表す前記画像を生成することを含む、請求項8に記載の手術システム。 - 前記動作には、
要員の活動情報を受信すること、
該要員の活動情報と要員の活動シグネチャとの間の一致を判定すること、
外科的処置情報を受信すること、及び
該外科的処置情報と外科的処置シグネチャとの間の一致を判定すること、がさらに含まれ、
前記画像を生成することは、前記手術室のレイアウト情報と前記手術室のレイアウトシグネチャとの間の一致、前記要員の活動情報と前記要員の活動シグネチャとの間の一致、及び前記外科的処置情報と前記外科的処置シグネチャとの間の一致の組合せに少なくとも部分的に基づいて、前記手術システムの位置付けを表す前記画像を生成することを含む、請求項8に記載の手術システム。 - 前記動作には、
要員の活動情報を受信すること、
該要員の活動情報と要員の活動シグネチャとの間の一致を判定すること、
外科的処置情報を受信すること、及び
該外科的処置情報と外科的処置シグネチャとの間の一致を判定すること、がさらに含まれ、
前記画像を生成することは、前記手術室のレイアウト情報と前記手術室のレイアウトシグネチャとの間の一致、前記要員の活動情報と前記要員の活動シグネチャとの間の一致、及び前記外科的処置情報と前記外科的処置シグネチャとの間の一致の組合せに少なくとも部分的に基づいて、前記手術システムの位置付けを表す前記画像を生成することを含む、請求項8に記載の手術システム。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662421089P | 2016-11-11 | 2016-11-11 | |
| US62/421,089 | 2016-11-11 | ||
| JP2019524340A JP7481114B2 (ja) | 2016-11-11 | 2017-11-10 | 走査ベースの位置付けを伴う遠隔操作手術システム |
| PCT/US2017/061144 WO2018089823A2 (en) | 2016-11-11 | 2017-11-10 | Teleoperated surgical system with scan based positioning |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019524340A Division JP7481114B2 (ja) | 2016-11-11 | 2017-11-10 | 走査ベースの位置付けを伴う遠隔操作手術システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022141975A JP2022141975A (ja) | 2022-09-29 |
| JP7367140B2 true JP7367140B2 (ja) | 2023-10-23 |
Family
ID=62110323
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019524340A Active JP7481114B2 (ja) | 2016-11-11 | 2017-11-10 | 走査ベースの位置付けを伴う遠隔操作手術システム |
| JP2022122444A Active JP7367140B2 (ja) | 2016-11-11 | 2022-08-01 | 走査ベースの位置付けを伴う遠隔操作手術システム |
| JP2023187752A Pending JP2024014885A (ja) | 2016-11-11 | 2023-11-01 | 走査ベースの位置付けを伴う遠隔操作手術システム |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019524340A Active JP7481114B2 (ja) | 2016-11-11 | 2017-11-10 | 走査ベースの位置付けを伴う遠隔操作手術システム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023187752A Pending JP2024014885A (ja) | 2016-11-11 | 2023-11-01 | 走査ベースの位置付けを伴う遠隔操作手術システム |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11406462B2 (ja) |
| EP (1) | EP3538013A4 (ja) |
| JP (3) | JP7481114B2 (ja) |
| KR (2) | KR102515323B1 (ja) |
| CN (2) | CN110062608B (ja) |
| WO (1) | WO2018089823A2 (ja) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US9439668B2 (en) | 2012-04-09 | 2016-09-13 | Ethicon Endo-Surgery, Llc | Switch arrangements for ultrasonic surgical instruments |
| US20140005705A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulating shafts |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9737355B2 (en) | 2014-03-31 | 2017-08-22 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US10751108B2 (en) | 2015-09-30 | 2020-08-25 | Ethicon Llc | Protection techniques for generator for digitally generating electrosurgical and ultrasonic electrical signal waveforms |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US10828058B2 (en) | 2016-01-15 | 2020-11-10 | Ethicon Llc | Modular battery powered handheld surgical instrument with motor control limits based on tissue characterization |
| US12193698B2 (en) | 2016-01-15 | 2025-01-14 | Cilag Gmbh International | Method for self-diagnosing operation of a control switch in a surgical instrument system |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US12089902B2 (en) | 2019-07-30 | 2024-09-17 | Coviden Lp | Cone beam and 3D fluoroscope lung navigation |
| CN110916799A (zh) * | 2019-11-22 | 2020-03-27 | 江苏集萃智能制造技术研究所有限公司 | 基于5g网络的穿刺机器人导航系统 |
| US12064109B2 (en) | 2019-12-30 | 2024-08-20 | Cilag Gmbh International | Surgical instrument comprising a feedback control circuit |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US12023086B2 (en) | 2019-12-30 | 2024-07-02 | Cilag Gmbh International | Electrosurgical instrument for delivering blended energy modalities to tissue |
| US12076006B2 (en) | 2019-12-30 | 2024-09-03 | Cilag Gmbh International | Surgical instrument comprising an orientation detection system |
| US20210196357A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with asynchronous energizing electrodes |
| US12053224B2 (en) | 2019-12-30 | 2024-08-06 | Cilag Gmbh International | Variation in electrode parameters and deflectable electrode to modify energy density and tissue interaction |
| US12114912B2 (en) | 2019-12-30 | 2024-10-15 | Cilag Gmbh International | Non-biased deflectable electrode to minimize contact between ultrasonic blade and electrode |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US20210196361A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with monopolar and bipolar energy capabilities |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US12082808B2 (en) | 2019-12-30 | 2024-09-10 | Cilag Gmbh International | Surgical instrument comprising a control system responsive to software configurations |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| US11759251B2 (en) | 2019-12-30 | 2023-09-19 | Cilag Gmbh International | Control program adaptation based on device status and user input |
| US11707318B2 (en) | 2019-12-30 | 2023-07-25 | Cilag Gmbh International | Surgical instrument with jaw alignment features |
| EP3906882A1 (en) * | 2020-05-05 | 2021-11-10 | Ecential Robotics | Surgical robotic system |
| US12068068B2 (en) * | 2021-07-22 | 2024-08-20 | Cilag Gmbh International | Cooperative composite video streams layered onto the surgical site and instruments |
| EP4134966A1 (en) * | 2021-08-12 | 2023-02-15 | TRUMPF Medizin Systeme GmbH + Co. KG | Operating room video analytic systems and methods |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070268133A1 (en) | 2006-03-17 | 2007-11-22 | Med Wave, Llc | System for tracking surgical items in an operating room environment |
| JP2012005557A (ja) | 2010-06-23 | 2012-01-12 | Terumo Corp | 医療用ロボットシステム |
| US20140148816A1 (en) | 2012-11-26 | 2014-05-29 | Michael W. McDONALD | Surgery port placement system and related methods |
| JP2015019679A (ja) | 2013-07-16 | 2015-02-02 | セイコーエプソン株式会社 | 情報処理装置、情報処理方法、および、情報処理システム |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5603318A (en) * | 1992-04-21 | 1997-02-18 | University Of Utah Research Foundation | Apparatus and method for photogrammetric surgical localization |
| US5446548A (en) * | 1993-10-08 | 1995-08-29 | Siemens Medical Systems, Inc. | Patient positioning and monitoring system |
| AU6262698A (en) * | 1997-02-04 | 1998-08-25 | National Aeronautics And Space Administration - Nasa | Multimodality instrument for tissue characterization |
| US5919135A (en) | 1997-02-28 | 1999-07-06 | Lemelson; Jerome | System and method for treating cellular disorders in a living being |
| EP2023844B1 (en) * | 2006-05-19 | 2017-06-21 | Mako Surgical Corp. | Apparatus for controlling a haptic device |
| CN102933163A (zh) | 2010-04-14 | 2013-02-13 | 史密夫和内修有限公司 | 用于基于患者的计算机辅助手术程序的系统和方法 |
| US8837791B2 (en) * | 2010-12-22 | 2014-09-16 | Kabushiki Kaisha Toshiba | Feature location method and system |
| US10806325B2 (en) * | 2012-08-15 | 2020-10-20 | Intuitive Surgical Operations, Inc. | Methods and systems for optimizing video streaming |
| AU2014240998B2 (en) * | 2013-03-13 | 2018-09-20 | Stryker Corporation | System for arranging objects in an operating room in preparation for surgical procedures |
| WO2015003748A1 (en) * | 2013-07-11 | 2015-01-15 | Brainlab Ag | Generation of a patient-specific anatomical atlas |
| US9445713B2 (en) | 2013-09-05 | 2016-09-20 | Cellscope, Inc. | Apparatuses and methods for mobile imaging and analysis |
| CN110226967B (zh) * | 2014-03-17 | 2022-10-28 | 直观外科手术操作公司 | 用于远程操作医疗系统的结构调整系统和方法 |
| KR102450087B1 (ko) * | 2014-03-17 | 2022-10-06 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격 조종 의료 시스템에서 미리 설정된 암 위치를 가지는 자동화된 구조 |
| WO2016087539A2 (en) * | 2014-12-02 | 2016-06-09 | KB Medical SA | Robot assisted volume removal during surgery |
| WO2016187002A1 (en) * | 2015-05-15 | 2016-11-24 | Mako Surgical Corp. | Systems and methods for providing guidance for a robotic medical procedure |
| JP2017023339A (ja) * | 2015-07-21 | 2017-02-02 | 株式会社デンソー | 医療行為支援装置 |
| US10136949B2 (en) * | 2015-08-17 | 2018-11-27 | Ethicon Llc | Gathering and analyzing data for robotic surgical systems |
| US10695134B2 (en) * | 2016-08-25 | 2020-06-30 | Verily Life Sciences Llc | Motion execution of a robotic system |
| US11039893B2 (en) * | 2016-10-21 | 2021-06-22 | Globus Medical, Inc. | Robotic surgical systems |
-
2017
- 2017-11-10 KR KR1020197016280A patent/KR102515323B1/ko active IP Right Grant
- 2017-11-10 EP EP17870051.4A patent/EP3538013A4/en active Pending
- 2017-11-10 JP JP2019524340A patent/JP7481114B2/ja active Active
- 2017-11-10 WO PCT/US2017/061144 patent/WO2018089823A2/en unknown
- 2017-11-10 CN CN201780073378.6A patent/CN110062608B/zh active Active
- 2017-11-10 KR KR1020237009980A patent/KR102654065B1/ko active IP Right Grant
- 2017-11-10 US US16/349,214 patent/US11406462B2/en active Active
- 2017-11-10 CN CN202310370618.6A patent/CN116327376A/zh active Pending
-
2022
- 2022-07-12 US US17/863,361 patent/US20220387119A1/en active Pending
- 2022-08-01 JP JP2022122444A patent/JP7367140B2/ja active Active
-
2023
- 2023-11-01 JP JP2023187752A patent/JP2024014885A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070268133A1 (en) | 2006-03-17 | 2007-11-22 | Med Wave, Llc | System for tracking surgical items in an operating room environment |
| JP2012005557A (ja) | 2010-06-23 | 2012-01-12 | Terumo Corp | 医療用ロボットシステム |
| US20140148816A1 (en) | 2012-11-26 | 2014-05-29 | Michael W. McDONALD | Surgery port placement system and related methods |
| JP2015019679A (ja) | 2013-07-16 | 2015-02-02 | セイコーエプソン株式会社 | 情報処理装置、情報処理方法、および、情報処理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110062608A (zh) | 2019-07-26 |
| CN116327376A (zh) | 2023-06-27 |
| KR102515323B1 (ko) | 2023-03-30 |
| EP3538013A4 (en) | 2020-10-07 |
| WO2018089823A3 (en) | 2018-07-26 |
| US11406462B2 (en) | 2022-08-09 |
| EP3538013A2 (en) | 2019-09-18 |
| KR20190070360A (ko) | 2019-06-20 |
| KR20230044331A (ko) | 2023-04-03 |
| JP2019534098A (ja) | 2019-11-28 |
| CN110062608B (zh) | 2023-04-25 |
| JP2024014885A (ja) | 2024-02-01 |
| US20200188047A1 (en) | 2020-06-18 |
| US20220387119A1 (en) | 2022-12-08 |
| WO2018089823A2 (en) | 2018-05-17 |
| JP7481114B2 (ja) | 2024-05-10 |
| JP2022141975A (ja) | 2022-09-29 |
| KR102654065B1 (ko) | 2024-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7367140B2 (ja) | 走査ベースの位置付けを伴う遠隔操作手術システム | |
| US20250017673A1 (en) | Teleoperated surgical system with patient health records based instrument control | |
| US11737841B2 (en) | Configuring surgical system with surgical procedures atlas | |
| JP7504154B2 (ja) | 手術技能レベルベース器具制御を備える遠隔操作手術システム | |
| CN116035698A (zh) | 具有手术器械磨损跟踪的远程操作手术系统 | |
| KR20250024858A (ko) | 환자 건강 기록들 기반 기구 제어를 갖는 원격조작 수술 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230905 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230912 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231011 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7367140 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |