JP7164035B2 - 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム - Google Patents
動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム Download PDFInfo
- Publication number
- JP7164035B2 JP7164035B2 JP2021527712A JP2021527712A JP7164035B2 JP 7164035 B2 JP7164035 B2 JP 7164035B2 JP 2021527712 A JP2021527712 A JP 2021527712A JP 2021527712 A JP2021527712 A JP 2021527712A JP 7164035 B2 JP7164035 B2 JP 7164035B2
- Authority
- JP
- Japan
- Prior art keywords
- block
- prediction
- intra
- motion vector
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















































































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/85—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression
- H04N19/86—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression involving reduction of coding artifacts, e.g. of blockiness
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
実施の形態では、所定の大きさで符号化・復号処理対象画像を均等分割する。この単位をツリーブロックと定義する。図4では、ツリーブロックのサイズを128x128画素としているが、ツリーブロックのサイズはこれに限定されるものではなく、任意のサイズを設定してよい。処理対象(符号化処理においては符号化対象、復号処理においては復号対象に対応する。)のツリーブロックは、ラスタスキャン順、すなわち左から右、上から下の順序で切り替わる。各ツリーブロックの内部は、さらに再帰的な分割が可能である。ツリーブロックを再帰的に分割した後の、符号化・復号の対象となるブロックを符号化ブロックと定義する。また、ツリーブロック、符号化ブロックを総称してブロックと定義する。適切なブロック分割を行うことにより効率的な符号化が可能となる。ツリーブロックのサイズは、符号化装置と復号装置で予め取り決めた固定値とすることもできるし、符号化装置が決定したツリーブロックのサイズを復号装置に伝送するような構成をとることもできる。ここでは、ツリーブロックの最大サイズを128x128画素、ツリーブロックの最小サイズを16x16画素とする。また、符号化ブロックの最大サイズを64x64画素、符号化ブロックの最小サイズを4x4画素とする。
処理対象符号化ブロック単位で、処理対象画像の処理済み画像信号から予測を行うイントラ予測(MODE_INTRA)、及び処理済み画像の画像信号から予測を行うインター予測(MODE_INTER)を切り替える。
処理済み画像は、符号化処理においては符号化が完了した信号を復号した画像、画像信号、ツリーブロック、ブロック、符号化ブロック等に用いられ、復号処理においては復号が完了した画像、画像信号、ツリーブロック、ブロック、符号化ブロック等に用いられる。
このイントラ予測(MODE_INTRA)とインター予測(MODE_INTER)を識別するモードを予測モード(PredMode)と定義する。予測モード(PredMode)はイントラ予測(MODE_INTRA)、またはインター予測(MODE_INTER)を値として持つ。
イントラブロックコピー(Intra Block Copy)予測は、処理対象ピクチャにおける復号済みの画素を予測値として参照し、処理対象ブロックを符号化/復号する処理である。そして、処理対象ブロックから参照する画素までの距離は、ブロックベクトルで表す。ブロックベクトルは処理対象ピクチャを参照し、参照ピクチャは一意に定まるため、参照インデックスは不要である。ブロックベクトルと動きベクトルの違いは、参照するピクチャが処理対象ピクチャか処理済みピクチャかである。また、ブロックベクトルは、適応動きベクトル解像度(AMVR)を用いて、1画素精度または4画素精度を選択できる。
イントラブロックコピーでは、予測イントラブロックコピーモードと、マージイントラブロックコピーモードの2つのモードを選択可能である。
予測イントラブロックコピーモードは、処理済みの情報から導出する予測ブロックベクトルと、差分ブロックベクトルから、処理対象ブロックのブロックベクトルを決定するモードである。予測ブロックベクトルは、処理対象ブロックに隣接する処理済みブロックと、予測ブロックベクトルを特定するためのインデックスから導出する。予測ブロックベクトルを特定するためのインデックス、差分ブロックベクトルはビットストリームで伝送する。
マージイントラブロックコピーモードは、差分動きベクトルを伝送せずに、処理対象ブロックに隣接する処理済みブロックのイントラブロックコピー予測情報から、処理対象ブロックのイントラブロックコピー予測情報を導出するモードである。
処理済み画像の画像信号から予測を行うインター予測では、複数の処理済み画像を参照ピクチャとして用いることができる。複数の参照ピクチャを管理するため、L0(参照リスト0)とL1(参照リスト1)の2種類の参照リストを定義し、それぞれ参照インデックスを用いて参照ピクチャを特定する。PスライスではL0予測(Pred_L0)が利用可能である。BスライスではL0予測(Pred_L0)、L1予測(Pred_L1)、双予測(Pred_BI)が利用可能である。L0予測(Pred_L0)はL0で管理されている参照ピクチャを参照するインター予測であり、L1予測(Pred_L1)はL1で管理されている参照ピクチャを参照するインター予測である。双予測(Pred_BI)はL0予測とL1予測が共に行われ、L0とL1のそれぞれで管理されている1つずつの参照ピクチャを参照するインター予測である。L0予測、L1予測、双予測を特定する情報を、インター予測モードと定義する。以降の処理において出力に添え字LXが付いている定数、変数に関しては、L0、L1ごとに処理が行われることを前提とする。
予測動きベクトルモードは、予測動きベクトルを特定するためのインデックス、差分動きベクトル、インター予測モード、参照インデックスを伝送し、処理対象ブロックのインター予測情報を決定するモードである。予測動きベクトルは、処理対象ブロックに隣接する処理済みブロック、または処理済み画像に属するブロックで処理対象ブロックと同一位置またはその付近(近傍)に位置するブロックから導出した予測動きベクトル候補と、予測動きベクトルを特定するためのインデックスから導出する。
マージモードは、差分動きベクトル、参照インデックスを伝送せずに、処理対象ブロックに隣接する処理済みブロック、または処理済み画像に属するブロックで処理対象ブロックと同一位置またはその付近(近傍)に位置するブロックのインター予測情報から、処理対象ブロックのインター予測情報を導出するモードである。
図11は、予測動きベクトルモード、マージモードで、インター予測情報を導出するために参照する参照ブロックを説明する図である。A0,A1,A2,B0,B1,B2,B3は、処理対象ブロックに隣接する処理済みブロックである。T0は、処理済み画像に属するブロックで、処理対象画像における処理対象ブロックと同一位置またはその付近(近傍)に位置するブロックである。
アフィン変換動き補償は、符号化ブロックを所定単位のサブブロックに分割し、分割された各サブブロックに対して個別に動きベクトルを決定して動き補償を行うものである。各サブブロックの動きベクトルは、処理対象ブロックに隣接する処理済みブロック、または処理済み画像に属するブロックで処理対象ブロックと同一位置またはその付近(近傍)に位置するブロックのインター予測情報から導出する1つ以上の制御点に基づき導出する。本実施の形態では、サブブロックのサイズを4x4画素とするが、サブブロックのサイズはこれに限定されるものではないし、画素単位で動きベクトルを導出してもよい。
図15に、制御点が3つの場合のアフィン変換動き補償の例を示す。この場合、3つの制御点が水平方向成分、垂直方向成分の2つのパラメータを有する。このため、制御点が3つの場合のアフィン変換を、6パラメータアフィン変換と呼称する。図15のCP1、CP2、CP3が制御点である。
図12A、図12B、および図13を用いて、符号化ブロックの予測モードを表現するためのシンタックスを説明する。図12Aのpred_mode_flagは、インター予測か否かを示すフラグである。pred_mode_flagが0であればインター予測となり、pred_mode_flagが1であればイントラ予測となる。イントラ予測の場合には、イントラブロックコピー予測であるかを示すフラグであるpred_mode_ibc_flagを送る。イントラブロックコピー予測である場合(pred_mode_ibc_flag=1)は、merge_flagを送る。merge_flagは、マージイントラブロックコピーモードとするか、予測イントラブロックコピーモードとするかを示すフラグである。マージイントラブロックコピーモードである場合(merge_flag=1)は、マージインデックスmerge_idxを送る。イントラブロックコピー予測でない場合(pred_mode_ibc_flag=0)、通常イントラ予測とし、通常イントラ予測の情報intra_pred_modeを送る。
インター予測の場合にはmerge_flagを送る。merge_flagは、マージモードとするか、予測動きベクトルモードとするかを示すフラグである。予測動きベクトルモードの場合(merge_flag=0)、サブブロック予測動きベクトルモードを適用するか否かを示すフラグinter_affine_flagを送る。サブブロック予測動きベクトルモードを適用する場合(inter_affine_flag=1)、cu_affine_type_flagを送る。cu_affine_type_flagは、サブブロック予測動きベクトルモードにおいて、制御点の数を決定するためのフラグである。
一方、マージモードの場合(merge_flag=1)、図12Bのmerge_subblock_flagを送る。merge_subblock_flagは、サブブロックマージモードを適用するか否かを示すフラグである。サブブロックマージモードの場合(merge_subblock_flag=1)、マージインデックスmerge_subblock_idxを送る。一方、サブブロックマージモードでない場合(merge_subblock_flag=0)、三角マージモードを適用するか否かを示すフラグmerge_triangle_flagを送る。三角マージモードを適用する場合(merge_triangle_flag=1)、ブロックを分割する方向merge_triangle_split_dir、および分割された2つのパーティションごとにマージ三角インデックスmerge_triangle_idx0,merge_triangle_idx1を送る。一方、三角マージモードを適用しない場合(merge_triangle_flag=0)、マージインデックスmerge_idxを送る。
図13にインター予測の各シンタックスエレメントの値と、それに対応する予測モードを示す。merge_flag=0,inter_affine_flag=0は、通常予測動きベクトルモード(Inter Pred Mode)に対応する。merge_flag=0,inter_affine_flag=1は、サブブロック予測動きベクトルモード(Inter Affine Mode)に対応する。merge_flag=1,merge_subblock_flag=0,merge_trianlge_flag=0は、通常マージモード(Merge Mode)に対応する。merge_flag=1,merge_subblock_flag=0,merge_trianlge_flag=1は、三角マージモード(Triangle Merge Mode)に対応する。merge_flag=1,merge_subblock_flag=1は、サブブロックマージモード(Affine Merge Mode)に対応する。
POC(Picture Order Count)は符号化されるピクチャに関連付けられる変数であり、ピクチャの出力順序に応じた1ずつ増加する値が設定される。POCの値によって、同じピクチャであるかを判別したり、出力順序でのピクチャ間の前後関係を判別したり、ピクチャ間の距離を導出したりすることができる。例えば、2つのピクチャのPOCが同じ値を持つ場合、同一のピクチャであると判断できる。2つのピクチャのPOCが違う値を持つ場合、POCの値が小さいピクチャのほうが、先に出力されるピクチャであると判断でき、2つのピクチャのPOCの差が時間軸方向でのピクチャ間距離を示す。
本発明の第1の実施の形態に係る画像符号化装置100及び画像復号装置200について説明する。
実施の形態に係るイントラ予測方法は、図1の画像符号化装置100のイントラ予測部103および図2の画像復号装置200のイントラ予測部204において実施される。
実施の形態に係るイントラ予測方法について、図面を用いて説明する。イントラ予測方法は符号化ブロック単位で符号化及び復号の処理の何れでも実施される。
<符号化側のイントラ予測部103の説明>
図40は図1の画像符号化装置100のイントラ予測部103の詳細な構成を示す図である。通常イントラ予測部351は、処理対象の符号化ブロックに隣接する復号済み画素から、通常イントラ予測により予測画像信号を生成し、複数のイントラ予測モードの中から適したイントラ予測モードを選択し、選択されたイントラ予測モード、及び選択されたイントラ予測モードに応じた予測画像信号を予測方法決定部105に供給する。図10A及び図10Bにイントラ予測の例を示す。図10Aは、通常イントラ予測の予測方向とイントラ予測モード番号の対応を示したものである。例えば、イントラ予測モード50は、垂直方向に画素をコピーすることによりイントラ予測画像を生成する。イントラ予測モード1は、DCモードであり、処理対象ブロックのすべての画素値を参照画素の平均値とするモードである。イントラ予測モード0はPlanarモードであり、垂直方向・水平方向の参照画素から2次元的なイントラ予測画像を作成するモードである。図10Bは、イントラ予測モード40の場合のイントラ予測画像を生成する例である。処理対象ブロックの各画素に対し、イントラ予測モードの示す方向の参照画素の値をコピーする。イントラ予測モードの参照画素が整数位置でない場合には、周辺の整数位置の参照画素値から補間により参照画素値を決定する。
イントラブロックコピー予測部352は、復号画像メモリ104から処理対象の符号化ブロックと同一の画像信号の復号済み領域を取得し、イントラブロックコピー処理により、予測画像信号を生成し、予測方法決定部105に供給する。イントラブロックコピー予測部352の詳細な構成と処理については後述する。
<復号側のイントラ予測部204の説明>
図41は図2の画像復号装置200のイントラ予測部204の詳細な構成を示す図である。
通常イントラ予測部361は、処理対象の符号化ブロックに隣接する復号済み画素から、通常イントラ予測により予測画像信号を生成し、複数のイントラ予測モードの中から適したイントラ予測モードを選択し、選択されたイントラ予測モード、及び選択されたイントラ予測モードに応じた予測画像信号を得る。この予測画像信号がスイッチ364を経由して復号画像信号重畳部207に供給される。図41の通常イントラ予測部361の処理は、図40の通常イントラ予測部351に対応するものであるため、詳細の説明を省略する。
イントラブロックコピー予測部362は、復号画像メモリ208から処理対象の符号化ブロックと同一の画像信号の復号済み領域を取得し、イントラブロックコピー処理により、予測画像信号を得る。この予測画像信号がスイッチ364を経由して復号画像信号重畳部207に供給される。イントラブロックコピー予測部362の詳細な構成と処理については後述する。
実施の形態に係るインター予測方法は、図1の画像符号化装置のインター予測部102および図2の画像復号装置のインター予測部203において実施される。
図16は図1の画像符号化装置のインター予測部102の詳細な構成を示す図である。通常予測動きベクトルモード導出部301は、複数の通常予測動きベクトル候補を導出して予測動きベクトルを選択し、選択した予測動きベクトルと、検出された動きベクトルとの差分動きベクトルを算出する。検出されたインター予測モード、参照インデックス、動きベクトル、算出された差分動きベクトルが通常予測動きベクトルモードのインター予測情報となる。このインター予測情報がインター予測モード判定部305に供給される。通常予測動きベクトルモード導出部301の詳細な構成と処理については後述する。
図22は図2の画像復号装置のインター予測部203の詳細な構成を示す図である。
図17の通常予測動きベクトルモード導出部301は、空間予測動きベクトル候補導出部321、時間予測動きベクトル候補導出部322、履歴予測動きベクトル候補導出部323、予測動きベクトル候補補充部325、通常動きベクトル検出部326、予測動きベクトル候補選択部327、動きベクトル減算部328を含む。
図19を参照して符号化側の通常予測動きベクトルモード導出処理手順を説明する。図19の処理手順の説明において、図19に示した通常という言葉を省略することがある。
mvdLX = mvLX - mvpLX
としてLXの差分動きベクトルmvdLXを算出する(図19のステップS105)。
次に、図25を参照して復号側の通常予測動きベクトルモード処理手順を説明する。復号側では、空間予測動きベクトル候補導出部421、時間予測動きベクトル候補導出部422、履歴予測動きベクトル候補導出部423、予測動きベクトル候補補充部425で、通常予測動きベクトルモードのインター予測で用いる動きベクトルをL0,L1毎にそれぞれ算出する(図25のステップS201~S206)。具体的には処理対象ブロックの予測モードPredModeがインター予測(MODE_INTER)で、処理対象ブロックのインター予測モードがL0予測(Pred_L0)の場合、L0の予測動きベクトル候補リストmvpListL0を算出して、予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0を算出する。処理対象ブロックのインター予測モードがL1予測(Pred_L1)の場合、L1の予測動きベクトル候補リストmvpListL1を算出して、予測動きベクトルmvpL1を選択し、L1の動きベクトルmvL1を算出する。処理対象ブロックのインター予測モードが双予測(Pred_BI)の場合、L0予測とL1予測が共に行われ、L0の予測動きベクトル候補リストmvpListL0を算出して、L0の予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0を算出するとともに、L1の予測動きベクトル候補リストmvpListL1を算出して、L1の予測動きベクトルmvpL1を算出し、L1の動きベクトルmvL1をそれぞれ算出する。
mvLX = mvpLX + mvdLX
としてLXの動きベクトルmvLXを算出する(図25のステップS205)。
図20は本発明の実施の形態に係る画像符号化装置の通常予測動きベクトルモード導出部301及び画像復号装置の通常予測動きベクトルモード導出部401とで共通する機能を有する通常予測動きベクトルモード導出処理の処理手順を表すフローチャートである。
図18の通常マージモード導出部302は、空間マージ候補導出部341、時間マージ候補導出部342、平均マージ候補導出部344、履歴マージ候補導出部345、マージ候補補充部346、マージ候補選択部347を含む。
なお、マージ候補リストmergeCandList内に登録されているマージ候補数numCurrMergeCandが、最大マージ候補数MaxNumMergeCandより小さい場合、マージ候補リストmergeCandList内に登録されているマージ候補数numCurrMergeCandが最大マージ候補数MaxNumMergeCandを上限として履歴マージ候補は導出されて、マージ候補リストmergeCandListに登録される。
なお、マージ候補リストmergeCandList内に登録されているマージ候補数numCurrMergeCandが、最大マージ候補数MaxNumMergeCandより小さい場合、マージ候補リストmergeCandList内に登録されているマージ候補数numCurrMergeCandが最大マージ候補数MaxNumMergeCandを上限として平均マージ候補は導出されて、マージ候補リストmergeCandListに登録される。
ここで、平均マージ候補は、マージ候補リストmergeCandListに登録されている第1のマージ候補と第2のマージ候補の有する動きベクトルをL0予測及びL1予測毎に平均して得られる動きベクトルを有する新たなマージ候補である。
次に、符号化側の符号化情報格納メモリ111及び復号側の符号化情報格納メモリ205に備える履歴予測動きベクトル候補リストHmvpCandListの初期化方法および更新方法について詳細に説明する。図26は履歴予測動きベクトル候補リスト初期化・更新処理手順を説明するフローチャートである。
次に、符号化側の通常予測動きベクトルモード導出部301の履歴予測動きベクトル候補導出部323、復号側の通常予測動きベクトルモード導出部401の履歴予測動きベクトル候補導出部423で共通の処理である図20のステップS304の処理手順である履歴予測動きベクトル候補リストHmvpCandListからの履歴予測動きベクトル候補の導出方法について詳細に説明する。図29は履歴予測動きベクトル候補導出処理手順を説明するフローチャートである。
次に、符号化側の通常マージモード導出部302の履歴マージ候補導出部345、復号側の通常マージモード導出部402の履歴マージ候補導出部445で共通の処理である図21のステップS404の処理手順である履歴マージ候補リストHmvpCandListからの履歴マージ候補の導出方法について詳細に説明する。図30は履歴マージ候補導出処理手順を説明するフローチャートである。
履歴予測動きベクトル候補リストのすべての要素の確認が完了するか、マージ候補リストのすべての要素にマージ候補が追加されたら、本履歴マージ候補の導出処理を完了する。
次に、符号化側の通常マージモード導出部302の平均マージ候補導出部344、復号側の通常マージモード導出部402の平均マージ候補導出部444で共通の処理である図21のステップS403の処理手順である平均マージ候補の導出方法について詳細に説明する。図38は平均マージ候補導出処理手順を説明するフローチャートである。
動き補償予測部306は、符号化において現在予測処理の対象となっているブロックの位置およびサイズを取得する。また、動き補償予測部306は、インター予測情報をインター予測モード判定部305から取得する。取得したインター予測情報から参照インデックスおよび動きベクトルを導出し、復号画像メモリ104内の参照インデックスで特定される参照ピクチャを、動きベクトルの分だけ予測ブロックの画像信号と同一位置より移動させた位置の画像信号を取得した後に予測信号を生成する。
単一の参照ピクチャからの予測を行う処理を単予測と定義し、単予測の場合はL0予測またはL1予測という、参照リストL0、L1に登録された2つの参照ピクチャのいずれか一方を利用した予測を行う。
本発明の実施の形態では、動き補償予測の精度向上のために、動き補償予測において複数の参照ピクチャの中から最適な参照ピクチャを選択することを可能とする。そのため、動き補償予測で利用した参照ピクチャを参照インデックスとして利用するとともに、参照インデックスを差分動きベクトルとともにビットストリーム中に符号化する。
動き補償予測部306は、図16の符号化側におけるインター予測部102でも示されるように、インター予測モード判定部305において、通常予測動きベクトルモード導出部301によるインター予測情報が選択された場合には、このインター予測情報をインター予測モード判定部305から取得し、現在処理対象となっているブロックのインター予測モード、参照インデックス、動きベクトルを導出し、動き補償予測信号を生成する。生成された動き補償予測信号は、予測方法決定部105に供給される。
動き補償予測部306は、図16の符号化側におけるインター予測部102でも示されるように、インター予測モード判定部305において、通常マージモード導出部302によるインター予測情報が選択された場合には、このインター予測情報をインター予測モード判定部305から取得し、現在処理対象となっているブロックのインター予測モード、参照インデックス、動きベクトルを導出し、動き補償予測信号を生成する。生成された動き補償予測信号は、予測方法決定部105に供給される。
動き補償予測部306は、図16の符号化側におけるインター予測部102でも示されるように、インター予測モード判定部305において、サブブロック予測動きベクトルモード導出部303によるインター予測情報が選択された場合には、このインター予測情報をインター予測モード判定部305から取得し、現在処理対象となっているブロックのインター予測モード、参照インデックス、動きベクトルを導出し、動き補償予測信号を生成する。生成された動き補償予測信号は、予測方法決定部105に供給される。
動き補償予測部306は、図16の符号化側におけるインター予測部102でも示されるように、インター予測モード判定部305において、サブブロックマージモード導出部304によるインター予測情報が選択された場合には、このインター予測情報をインター予測モード判定部305から取得し、現在処理対象となっているブロックのインター予測モード、参照インデックス、動きベクトルを導出し、動き補償予測信号を生成する。生成された動き補償予測信号は、予測方法決定部105に供給される。
通常予測動きベクトルモード、および通常マージモードでは、以下のフラグに基づいてアフィンモデルによる動き補償が利用できる。以下のフラグは、符号化処理においてインター予測モード判定部305により決定されるインター予測の条件に基づいて以下のフラグに反映され、ビットストリーム中に符号化される。復号処理においては、ビットストリーム中の以下のフラグに基づいてアフィンモデルによる動き補償を行うか否かを特定する。
図39を参照してイントラブロックコピーの有効参照領域を説明する。図39Aは符号化ツリーブロック単位をイントラブロックコピー基準ブロックとして、有効参照領域を決定する場合の例である。図39Aの500、501、502、503、504は符号化ツリーブロックであり、504が処理対象の符号化ツリーブロックである。505は、処理対象符号化ブロックである。符号化ツリーブロックの処理順は、500、501、502、503、504の順とする。この場合、処理対象符号化ブロック505を含む符号化ツリーブロック504の直前に処理された3つの符号化ツリーブロック501、502、503を処理対象符号化ブロック505の有効参照領域とする。符号化ツリーブロック501より前に処理された符号化ツリーブロック、及び処理対象符号化ブロック505より前に処理が完了しているか否かに関わらず、処理対象符号化ブロック505を含む符号化ツリーブロック504に含まれる領域はすべて無効参照領域とする。
参照領域の処理済み画像を記憶するメモリ空間について説明する。図56は、符号化ツリーブロック単位をイントラブロックコピー基準ブロックとしたときの参照領域のメモリ空間を説明するための図である。図56Aの500,501,502,503,504,505は符号化ツリーブロックである。符号化ツリーブロック503は処理対象の符号化ツリーブロックである。符号化ツリーブロック500,符号化ツリーブロック501,符号化ツリーブロック502,処理済の符号化ツリーブロックであり、処理対象の符号化ツリーブロック503の参照領域に相当する。符号化ツリーブロック504,505は未処理の符号化ツリーブロックである。図56Aの600,601,602,603は、メモリ空間であり、メモリ空間600は符号化ツリーブロック500の処理済み画像を記憶している。同様に、メモリ空間601は符号化ツリーブロック501の処理済み画像を記憶し、メモリ空間602は符号化ツリーブロック502の処理済み画像を記憶している。メモリ空間603は処理対象の符号化ツリーブロック503の処理に従い、処理済み画像を順次記憶する。符号化ツリーブロック503の処理が完了すると、次に符号化ツリーブロック504の処理を開始する。
図44を参照して符号化側の予測イントラブロックコピー処理手順を説明する。
まず、ブロックベクトル検出部375でブロックベクトルmvLを検出する(図44のステップS4500)。 続いて、IBC空間ブロックベクトル候補導出部371、IBC履歴予測ブロックベクトル候補導出部372、IBC予測ブロックベクトル候補補充部373、IBC予測ブロックベクトル候補選択部376、ブロックベクトル減算部378で、予測ブロックベクトルモードで用いるブロックベクトルの差分ブロックベクトルを算出する(図44のステップS4501~S4503)。
mvdL = mvL - mvpL
として差分ブロックベクトルmvdLを算出する(図44のステップS4503)。
次に、図45を参照して復号側の予測ブロックベクトルモード処理手順を説明する。復号側では、IBC空間予測ブロックベクトル候補導出部471、IBC履歴ブロックベクトル候補導出部472、IBC予測ブロックベクトル補充部473で、予測ブロックベクトルモードで用いるブロックベクトルを算出する(図45のステップS4600~S4602)。具体的には予測ブロックベクトル候補リストmvpListLを算出して、予測ブロックベクトルmvpLを選択し、ブロックベクトルmvLを算出する。
mvL = mvpL + mvdL
としてブロックベクトルmvLを算出する(図45のステップS4602)。
図47は本発明の実施の形態に係る動画像符号化装置のイントラブロックコピー予測部352及び動画像復号装置のイントラブロックコピー予測部362とで共通する機能を有する予測イントラブロックコピーモード導出処理の処理手順を表すフローチャートである。
図42のイントラブロックコピー予測部352は、IBC空間ブロックベクトル候補導出部371、IBC履歴ブロックベクトル候補導出部372、IBCブロックベクトル補充部373、参照位置補正部380、参照領域境界補正部381、IBCマージ候補選択部374、IBC予測モード判定部377を含む。
mvC = ( ( mvL >> ( 3 + 2 ) ) * 32
となる。上式により、mvCのx,y成分それぞれが処理される。
図48は、参照位置補正部380及び参照位置補正部480の処理を説明するフローチャートである。いま、イントラブロックコピー基準ブロックの単位は符号化ツリーブロック(CTU)であり、その大きさは128x128画素でないものとする。
( xRefTL, yRefTL ) = ( xCb + ( mvL[ 0 ] >> 4 ), yCb + ( mvL[ 1 ] >> 4 ) )
( xRefBR, yRefBR ) = ( xRefTL + cbWidth - 1, yRefTL + cbHeight - 1 )
となる。ここで、処理対象符号化ブロックの位置を(xCb,yCb)、ブロックベクトルを(mvL[0],mvL[1])とし、処理対象符号化ブロックの幅はcbWidth、高さはcbHeightとする。
次に、CTUの大きさが128x128画素か否かを判定する(S6002)。いま、その大きさは128x128画素でないので(S6002:NO)、参照可能領域の左上および右下の位置を算出する(S6003)。参照可能領域の左上を( xAvlTL, yAvlTL )、右下を( xAvlBR, yAvlBR )とすると、
NL = Min( 1, 7 - CtbLog2SizeY ) - ( 1 << ((7 - CtbLog2SizeY) << 1) )
( xAvlTL, yAvlTL ) = ( ((xCb >> CtbLog2SizeY) + NL) << CtbLog2SizeY,
(yCb >> CtbLog2SizeY) << CtbLog2SizeY )
( xAvlBR, yAvlBR ) = ( ((xCb >> CtbLog2SizeY) << CtbLog2SizeY) - 1,
(((yCb >> CtbLog2SizeY) + 1) << CtbLog2SizeY) - 1 )
となる。ここで、CTUのサイズはCtbLog2SizeYとする。
mvL[0] = (xAvlTL - xCb) << 4
と補正する。これにより、xRefTL=xAvlTLとなるので、参照位置を補正できる。
mvL[1] = (yAvlTL - yCb) << 4
と補正する。これにより、yRefTL=yAvlTLとなるので、参照位置を補正できる。
mvL[0] = (xAvlBR - (xCb + cbWidth - 1)) << 4
と補正する。これにより、xRefBR=xAvlBRとなるので、参照位置を補正できる。
mvL[1] = (yAvlBR - (yCb + cbHeitght - 1)) << 4
と補正する。これにより、yRefBR=yAvlBRとなるので、参照位置を補正できる。
offset[4] = {0, 64, 128, 128}
NL = -offset[3 - blk_idx], NR = offset[blk_idx]
( xAvlTL, yAvlTL ) = ( (xCb >> CtbLog2SizeY) << CtbLog2SizeY + NL,
(yCb >> CtbLog2SizeY) << CtbLog2SizeY )
( xAvlBR, yAvlBR ) = ( ((xCb >> CtbLog2SizeY) << CtbLog2SizeY) - 1 + NR,
(((yCb >> CtbLog2SizeY) + 1) << CtbLog2SizeY) - 1 )
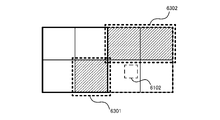
となる。ここで、blk_idxは、処理対象の符号化ブロックの位置を示すインデックスである。処理対象の符号化ツリーブロックを4分割したうち、処理対象の符号化ブロックが左上に位置している場合は、blk_idx=0とする。同様に、処理対象の符号化ブロックがそれぞれ右上、左下、右下に位置している場合は、blk_idxは1,2,3とする。図50Aはblk_idx=0の場合を示す図である。同様に、図50Bから図50Dは、それぞれblk_idx=1から3の場合を示す図である。
offset[4] = {64, 128, 64, 0}, NL = offset[blk_idx]
(X1, Y1) = (xAvlTL, yAvlTL + 64)
(X2, Y2) = (xAvlTL + NL, yAvlTL)
となる。
mvL[0] = (xAvlTL + NL - xCb) << 4
と補正する。これにより、xRefTL=xAvlTL+NLとなるので、参照位置を補正できる。
mvL[1] = (yAvlTL + 64 - yCb) << 4
と補正する。これにより、yRefTL=yAvlTL+64となるので、参照位置を補正できる。
offset[4] = {0, 64, 128, 64}, NR = offset[blk_idx]
(X3, Y3) = (xAvlBR, yAvlBR - 64)
(X4, Y4) = (xAvlBR - NR, yAvlBR)
となる。
mvL[0] = (xAvlBR - NR - (xCb + cbWitdh - 1)) << 4
と補正する。これにより、xRefBR=xAvlBRとなるので、参照位置を補正できる。
mvL[1] = (yAvlBR - 64 - (yCb + cbHeight - 1)) << 4
と補正する。これにより、yRefBR=yAvlBRとなるので、参照位置を補正できる。
xOffsetTL[4] = {-128, -128, -64, 0}, yOffsetTL[4] = {64, 64, 64, 0}
xOffsetBR[4] = {0, 0, 0, 128}, yOffsetBR[4] = {128, 128, 128, 64}
( xAvlTL, yAvlTL ) = ( (xCb >> CtbLog2SizeY) << CtbLog2SizeY
+ xOffsetTL[blk_idx],
(yCb >> CtbLog2SizeY) << CtbLog2SizeY + yOffsetTL[blk_idx])
( xAvlBR, yAvlBR ) = ( ((xCb >> CtbLog2SizeY) << CtbLog2SizeY) - 1
+ xOffsetBR[blk_idx],
(((yCb >> CtbLog2SizeY) + 1) << CtbLog2SizeY) - 1 + yOffsetBR[blk_idx] )となる。
out_xRefTL = xRefTL < xAvlTL
out_yRefTL = yRefTL < yAvlTL
out_xRefBR = xRefBR > xAvlBR
out_yRefBR = yRefBR > yAvlBR
として算出する(S6112)。
xOffsetTL[4] = {-64, 0, 0, 0}, yOffsetTL[4] = {0, 0, 0, 0}
xOffsetBR[4] = {0, 64, 128, 64}, yOffsetBR[4] = {128, 64, 64, 128}
( xAvlTL, yAvlTL ) = ( (xCb >> CtbLog2SizeY) << CtbLog2SizeY
+ xOffsetTL[blk_idx],
(yCb >> CtbLog2SizeY) << CtbLog2SizeY + yOffsetTL[blk_idx])
( xAvlBR, yAvlBR ) = ( ((xCb >> CtbLog2SizeY) << CtbLog2SizeY) - 1
+ xOffsetBR[blk_idx],
(((yCb >> CtbLog2SizeY) + 1) << CtbLog2SizeY) - 1 + yOffsetBR[blk_idx] )となる。
図58は、参照領域境界補正部381及び参照領域境界補正部481の処理を説明するためのフローチャートである。
( xRefTL, yRefTL ) = ( xCb + ( mvL[ 0 ] >> 4 ), yCb + ( mvL[ 1 ] >> 4 ) )
( xRefBR, yRefBR ) = ( xRefTL + cbWidth - 1, yRefTL + cbHeight - 1 )
により導出する(ステップS1401)。この手順は、図48のステップS6001と同様の手順となるため説明を省略する。
(xAvlATL, yAvlATL) = ( (xCb >> CtbLog2SizeY) << (CtbLog2SizeY) - (1 << CtbLog2SizeY),
(yCb >> CtbLog2SizeY) << (CtbLog2SizeY))
(xAvlABR, yAvlABR) = (xAvlATL + cbWidth - 1, yAvlATL + cbHeight - 1 )
(xAvlATL, yAvlATL) = ( (xCb >> CtbLog2SizeY) << (CtbLog2SizeY) - 2*(1 << CtbLog2SizeY)),
(yCb >> CtbLog2SizeY) << (CtbLog2SizeY))
(xAvlBBR, yAvlBBR) = (xAvlBTL + cbWidth -1, yAvlBTL + cbHeight - 1 )
(xAvlATL, yAvlATL) = ( (xCb >> CtbLog2SizeY) << (CtbLog2SizeY) - 3*(1 << CtbLog2SizeY),
(yCb >> CtbLog2SizeY) << (CtbLog2SizeY))
(xAvlCBR, yAvlCBR) = (xAvlCTL + cbWidth -1, yAvlCTL + cbHeight - 1 )
とする。符号化ツリーブロックを4分割した単位をイントラブロックコピー基準ブロックとしたときは、(xAvlATL, yAvlATL)、(xAvlBTL, yAvlBTL)、(xAvlCTL, yAvlCTL)をそれぞれ、
(xAvlATL, yAvlATL) = ( (xCb >> (CtbLog2SizeY-1)) << (CtbLog2SizeY-1) - (1 <<
(CtbLog2SizeY-1)),
(yCb >> (CtbLog2SizeY-1)) << ((CtbLog2SizeY-1))+ (1<<(CtbLog2SizeY-1)))
(xAvlABR, yAvlABR) = (xAvlATL + cbWidth - 1, yAvlATL + cbHeight - 1 )
(xAvlBTL, yAvlBTL) = ( (xCb >> (CtbLog2SizeY-1)) << (CtbLog2SizeY-1) - (1 <<
(CtbLog2SizeY)),
(yCb >> (CtbLog2SizeY-1)) << ((CtbLog2SizeY-1))+ (1<<(CtbLog2SizeY-1)))
(xAvlBBR, yAvlBBR) = (xAvlBTL + cbWidth -1, yAvlBTL + cbHeight - 1 )
(xAvlCTL, yAvlCTL) = ( (xCb >> (CtbLog2SizeY-1)) << (CtbLog2SizeY-1) - (1 <<
(CtbLog2SizeY-1)),
(yCb >> (CtbLog2SizeY-1)) << ((CtbLog2SizeY-1))+ (1<<(CtbLog2SizeY-1)))
(xAvlCBR, yAvlCBR) = (xAvlCTL + cbWidth -1, yAvlCTL + cbHeight - 1 )
とする。
Claims (8)
- 符号化ツリーブロックを一つ以上のイントラブロックコピー基準ブロックに分割する画 像符号化装置であって、
符号化情報格納メモリに格納された符号化情報から符号化対象ピクチャ内の符号化対象ブロックのブロックベクトル候補を導出するブロックベクトル候補導出部と、
前記ブロックベクトル候補から選択ブロックベクトルを選択する選択部と、
符号化対象イントラブロックコピー基準ブロックの直前の所定数の前記イントラブロックコピー基準ブロックの符号化済画像を記憶する記憶部と、
前記符号化対象ブロックを含む前記イントラブロックコピー基準ブロックの符号化済画像をすべて参照可能領域から除外し、
前記選択ブロックベクトルが示す参照ブロックの左上位置と右下位置がいずれも参照可能領域に含まれることを判定する参照領域境界補正部と、
を備えることを特徴とする画像符号化装置。 - 前記参照領域境界補正部は、
符号化対象イントラブロックコピー基準ブロックの直前の所定数の前記イントラブロックコピー基準ブロックより前に処理されたイントラブロックコピー基準ブロックの符号化済画像をすべて参照可能領域から除外することを特徴とする請求項1に記載の画像符号化装置。 - 符号化ツリーブロックを一つ以上のイントラブロックコピー基準ブロックに分割する画像符号化方法であって、
符号化情報格納メモリに格納された符号化情報から符号化対象ピクチャ内の符号化対象ブロックのブロックベクトル候補を導出するブロックベクトル候補導出ステップと、
前記ブロックベクトル候補から選択ブロックベクトルを選択する選択ステップと、
符号化対象イントラブロックコピー基準ブロックの直前の所定数の前記イントラブロックコピー基準ブロックの符号化済画像を記憶する記憶ステップと、
前記符号化対象ブロックを含む前記イントラブロックコピー基準ブロックの符号化済画像をすべて参照可能領域から除外し、
前記選択ブロックベクトルが示す参照ブロックの左上位置と右下位置がいずれも参照可能領域に含まれることを判定する参照領域境界補正ステップと、
を備えることを特徴とする画像符号化方法。 - 符号化ツリーブロックを一つ以上のイントラブロックコピー基準ブロックに分割する画像符号化プログラムであって、
符号化情報格納メモリに格納された符号化情報から符号化対象ピクチャ内の符号化対象ブロックのブロックベクトル候補を導出するブロックベクトル候補導出ステップと、
前記ブロックベクトル候補から選択ブロックベクトルを選択する選択ステップと、
符号化対象イントラブロックコピー基準ブロックの直前の所定数の前記イントラブロックコピー基準ブロックの符号化済画像を記憶する記憶ステップと、
前記符号化対象ブロックを含む前記イントラブロックコピー基準ブロックの符号化済画像をすべて参照可能領域から除外し、
前記選択ブロックベクトルが示す参照ブロックの左上位置と右下位置がいずれも参照可能領域に含まれることを判定する参照領域境界補正ステップと、
をコンピュータに実行させることを特徴とする画像符号化プログラム。 - 符号化ツリーブロックを一つ以上のイントラブロックコピー基準ブロックに分割する画像復号装置であって、
符号化情報格納メモリに格納された符号化情報から復号対象ピクチャ内の復号対象ブロックのブロックベクトル候補を導出するブロックベクトル候補導出部と、
前記ブロックベクトル候補から選択ブロックベクトルを選択する選択部と、
復号対象イントラブロックコピー基準ブロックの直前の所定数の前記イントラブロックコピー基準ブロックの復号済画像を記憶する記憶部と、
前記復号対象ブロックを含む前記イントラブロックコピー基準ブロックの復号済画像をすべて参照可能領域から除外し、
前記選択ブロックベクトルが示す参照ブロックの左上位置と右下位置がいずれも参照可能領域に含まれることを判定する参照領域境界補正部と、
を備えることを特徴とする画像復号装置。 - 前記参照領域境界補正部は、
符号化対象イントラブロックコピー基準ブロックの直前の所定数の前記イントラブロックコピー基準ブロックより前に処理されたイントラブロックコピー基準ブロックの復号済画像をすべて参照可能領域から除外することを特徴とする請求項5に記載の画像復号装置。 - 符号化ツリーブロックを一つ以上のイントラブロックコピー基準ブロックに分割する画像復号方法であって、
符号化情報格納メモリに格納された符号化情報から復号対象ピクチャ内の復号対象ブロックのブロックベクトル候補を導出するブロックベクトル候補導出ステップと、
前記ブロックベクトル候補から選択ブロックベクトルを選択する選択ステップと、
復号対象イントラブロックコピー基準ブロックの直前の所定数の前記イントラブロックコピー基準ブロックの復号済画像を記憶する記憶ステップと、
前記復号対象ブロックを含む前記イントラブロックコピー基準ブロックの復号済画像をすべて参照可能領域から除外し、
前記選択ブロックベクトルが示す参照ブロックの左上位置と右下位置がいずれも参照可能領域に含まれることを判定する参照領域境界補正ステップと、
を備えることを特徴とする画像復号方法。 - 符号化ツリーブロックを一つ以上のイントラブロックコピー基準ブロックに分割する画像復号プログラムであって、
符号化情報格納メモリに格納された符号化情報から復号対象ピクチャ内の復号対象ブロックのブロックベクトル候補を導出するブロックベクトル候補導出ステップと、
前記ブロックベクトル候補から選択ブロックベクトルを選択する選択ステップと、
復号対象イントラブロックコピー基準ブロックの直前の所定数の前記イントラブロックコピー基準ブロックの復号済画像を記憶する記憶ステップと、
前記復号対象ブロックを含む前記イントラブロックコピー基準ブロックの復号済画像をすべて参照可能領域から除外し、
前記選択ブロックベクトルが示す参照ブロックの左上位置と右下位置がいずれも参照可能領域に含まれることを判定する参照領域境界補正ステップと、
をコンピュータに実行させることを特徴とする画像復号プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022167467A JP7375890B2 (ja) | 2019-06-25 | 2022-10-19 | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2023167820A JP2023169406A (ja) | 2019-06-25 | 2023-09-28 | 画像復号装置、画像復号方法及び画像復号プログラム |
| JP2024035712A JP2024053075A (ja) | 2019-06-25 | 2024-03-08 | 画像復号装置、画像復号方法及び画像復号プログラム |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019117516 | 2019-06-25 | ||
| JP2019117516 | 2019-06-25 | ||
| PCT/JP2020/024926 WO2020262503A1 (ja) | 2019-06-25 | 2020-06-25 | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022167467A Division JP7375890B2 (ja) | 2019-06-25 | 2022-10-19 | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2020262503A1 JPWO2020262503A1 (ja) | 2020-12-30 |
| JPWO2020262503A5 JPWO2020262503A5 (ja) | 2022-05-27 |
| JP7164035B2 true JP7164035B2 (ja) | 2022-11-01 |
Family
ID=74061282
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021527712A Active JP7164035B2 (ja) | 2019-06-25 | 2020-06-25 | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2022167467A Active JP7375890B2 (ja) | 2019-06-25 | 2022-10-19 | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2023167820A Pending JP2023169406A (ja) | 2019-06-25 | 2023-09-28 | 画像復号装置、画像復号方法及び画像復号プログラム |
| JP2024035712A Pending JP2024053075A (ja) | 2019-06-25 | 2024-03-08 | 画像復号装置、画像復号方法及び画像復号プログラム |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022167467A Active JP7375890B2 (ja) | 2019-06-25 | 2022-10-19 | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| JP2023167820A Pending JP2023169406A (ja) | 2019-06-25 | 2023-09-28 | 画像復号装置、画像復号方法及び画像復号プログラム |
| JP2024035712A Pending JP2024053075A (ja) | 2019-06-25 | 2024-03-08 | 画像復号装置、画像復号方法及び画像復号プログラム |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20220109873A1 (ja) |
| EP (1) | EP3993421A4 (ja) |
| JP (4) | JP7164035B2 (ja) |
| KR (1) | KR20220003095A (ja) |
| CN (2) | CN113924782A (ja) |
| BR (1) | BR112021026156A2 (ja) |
| MX (1) | MX2021015005A (ja) |
| WO (1) | WO2020262503A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7063416B2 (ja) * | 2019-06-21 | 2022-05-09 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| US11659197B2 (en) * | 2020-04-07 | 2023-05-23 | Qualcomm Incorporated | Signaling number of subblock merge candidates in video coding |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020256102A1 (ja) | 2019-06-20 | 2020-12-24 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| WO2020256105A1 (ja) | 2019-06-21 | 2020-12-24 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090245371A1 (en) | 2008-03-28 | 2009-10-01 | Samsung Electronics Co., Ltd. | Method and apparatus for encoding/decoding information about intra-prediction mode of video |
| RU2658146C9 (ru) * | 2012-04-12 | 2018-12-12 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство декодирования движущегося изображения и способ декодирования движущегося изображения |
| KR102596735B1 (ko) * | 2019-05-16 | 2023-11-01 | 후아웨이 테크놀러지 컴퍼니 리미티드 | 루마 및 크로마 성분에 대한 ibc 전용 버퍼 및 디폴트 값 리프레싱을 사용하는 인코더, 디코더 및 대응하는 방법들 |
| US20230007273A1 (en) * | 2019-06-13 | 2023-01-05 | Huawei Technologies Co., Ltd. | Encoder, a decoder and corresponding methods using intra block copy (ibc) dedicated buffer and default value refreshing for luma and chroma component |
-
2020
- 2020-06-25 JP JP2021527712A patent/JP7164035B2/ja active Active
- 2020-06-25 EP EP20832279.2A patent/EP3993421A4/en active Pending
- 2020-06-25 CN CN202080041791.6A patent/CN113924782A/zh active Pending
- 2020-06-25 BR BR112021026156A patent/BR112021026156A2/pt unknown
- 2020-06-25 WO PCT/JP2020/024926 patent/WO2020262503A1/ja active Search and Examination
- 2020-06-25 CN CN202211353954.1A patent/CN115643413A/zh active Pending
- 2020-06-25 MX MX2021015005A patent/MX2021015005A/es unknown
- 2020-06-25 KR KR1020217039726A patent/KR20220003095A/ko unknown
-
2021
- 2021-12-16 US US17/552,397 patent/US20220109873A1/en active Pending
-
2022
- 2022-10-19 JP JP2022167467A patent/JP7375890B2/ja active Active
-
2023
- 2023-09-28 JP JP2023167820A patent/JP2023169406A/ja active Pending
-
2024
- 2024-03-08 JP JP2024035712A patent/JP2024053075A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020256102A1 (ja) | 2019-06-20 | 2020-12-24 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
| WO2020256105A1 (ja) | 2019-06-21 | 2020-12-24 | 株式会社Jvcケンウッド | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム |
Non-Patent Citations (7)
| Title |
|---|
| Benjamin Bross, Jianle Chen and Shan Liu,Versatile Video Coding (Draft 5),Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11,JVET-N1001 (version 7),14th Meeting: Geneva, CH,2019年05月29日,pp.52-59, 106-117, 233-242 |
| Han Gao et al.,Non-CE8: IBC Reference Area Rearrange,Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11,JVET-N0173-v2,14th Meeting: Geneva, CH,2019年03月,pp.1-5 |
| Han Gao et al.,Non-CE8: IBC Reference Memory for Arbitrary CTU Size,Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11,JVET-N0175-v2,14th Meeting: Geneva, CH,2019年03月,pp.1-7 |
| Han Gao, et al.,CE8-related: Dedicated IBC reference buffer without bitstream restrictions,Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11,JVET-O0248,15th Meeting: Gothenburg, SE,2019年06月,pp.1-7 |
| Jizheng Xu et al.,Non-CE8: intra block copy clean-up,Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11,JVET-N0251_v2,14th Meeting: Geneva, CH,2019年03月,pp.1-6 |
| Jizheng Xu et al.,Non-CE8: On IBC reference buffer design,Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11,JVET-N0472_v2,14th Meeting: Geneva, CH,2019年03月,pp.1-5 |
| Luong Pham Van et al.,CE8-related: Restrictions for the search area of the IBC blocks in CPR,Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 11,JVET-L0404-v2,12th Meeting: Macao, CN,2018年10月,pp.1-6 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115643413A (zh) | 2023-01-24 |
| EP3993421A1 (en) | 2022-05-04 |
| US20220109873A1 (en) | 2022-04-07 |
| JP7375890B2 (ja) | 2023-11-08 |
| EP3993421A4 (en) | 2022-08-31 |
| JP2024053075A (ja) | 2024-04-12 |
| KR20220003095A (ko) | 2022-01-07 |
| JPWO2020262503A1 (ja) | 2020-12-30 |
| MX2021015005A (es) | 2022-01-31 |
| JP2022191434A (ja) | 2022-12-27 |
| JP2023169406A (ja) | 2023-11-29 |
| WO2020262503A1 (ja) | 2020-12-30 |
| CN113924782A (zh) | 2022-01-11 |
| BR112021026156A2 (pt) | 2022-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7287433B2 (ja) | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム | |
| JP7209801B2 (ja) | 画像符号化装置、画像符号化方法、及び画像符号化プログラム、画像復号装置、画像復号方法及び画像復号プログラム | |
| JP7375890B2 (ja) | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム | |
| JP7318700B2 (ja) | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム | |
| JP7063416B2 (ja) | 動画像符号化装置、動画像符号化方法、及び動画像符号化プログラム、動画像復号装置、動画像復号方法及び動画像復号プログラム | |
| WO2020262506A1 (ja) | 画像符号化装置、画像符号化方法、及び画像符号化プログラム、画像復号装置、画像復号方法及び画像復号プログラム | |
| WO2020137882A1 (ja) | 画像復号装置、画像復号方法及び画像復号プログラム | |
| JP7338262B2 (ja) | 画像符号化装置、画像符号化方法及び画像符号化プログラム | |
| JP7354610B2 (ja) | 画像符号化装置、画像符号化方法及び画像符号化プログラム | |
| RU2781517C1 (ru) | Устройство кодирования динамического изображения, способ кодирования динамического изображения, программа кодирования динамического изображения, устройство декодирования динамического изображения, способ декодирования динамического изображения и программа декодирования динамического изображения | |
| WO2020262505A1 (ja) | 画像符号化装置、画像符号化方法、及び画像符号化プログラム、画像復号装置、画像復号方法及び画像復号プログラム | |
| RU2779635C1 (ru) | Устройство для кодирования видео, способ кодирования видео, программа кодирования видео, устройство для декодирования видео, способ декодирования видео и программа декодирования видео | |
| JP2021002752A (ja) | 画像復号装置、画像復号方法及び画像復号プログラム | |
| JP2021002751A (ja) | 画像符号化装置、画像符号化方法及び画像符号化プログラム | |
| JP2021002704A (ja) | 画像符号化装置、画像符号化方法及び画像符号化プログラム | |
| JP2021002748A (ja) | 画像符号化装置、画像符号化方法及び画像符号化プログラム | |
| JP2021002749A (ja) | 画像復号装置、画像復号方法及び画像復号プログラム | |
| JP2021005756A (ja) | 画像符号化装置、画像符号化方法及び画像符号化プログラム | |
| JP2021005757A (ja) | 画像符号化装置、画像符号化方法及び画像符号化プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A5211 Effective date: 20211216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220518 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220711 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20220826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220920 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221003 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7164035 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |