JP6880992B2 - Evaluation method, evaluation device and evaluation program - Google Patents
Evaluation method, evaluation device and evaluation program Download PDFInfo
- Publication number
- JP6880992B2 JP6880992B2 JP2017088087A JP2017088087A JP6880992B2 JP 6880992 B2 JP6880992 B2 JP 6880992B2 JP 2017088087 A JP2017088087 A JP 2017088087A JP 2017088087 A JP2017088087 A JP 2017088087A JP 6880992 B2 JP6880992 B2 JP 6880992B2
- Authority
- JP
- Japan
- Prior art keywords
- cluster
- clusters
- data
- feature amount
- transition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




























Landscapes
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
Description
本発明は、音データの処理技術に関する。 The present invention relates to a sound data processing technique.
生産設備やインフラ設備等の設備の状態を診断する技術として振動法が知られている。しかし、振動法の実施には各設備に対する振動センサの装着が必要であり、この振動センサが高価であるため、投資と回収のコストバランスの問題から普及していない。 The vibration method is known as a technique for diagnosing the state of equipment such as production equipment and infrastructure equipment. However, in order to implement the vibration method, it is necessary to attach a vibration sensor to each equipment, and since this vibration sensor is expensive, it is not widely used due to the problem of cost balance between investment and recovery.
この問題を解決する技術として音響診断が知られている。音響診断は、音データに対する音響分析により設備の異音を検知する技術である。例えば或る音響診断においては、音データからスペクトル分解により抽出された特徴量の各クラスタに対して設備の運転モードが対応付けられ、対象の音データから抽出された特徴量と各クラスタとの比較により、異音が発生したか判定される。 Acoustic diagnosis is known as a technique for solving this problem. Acoustic diagnosis is a technology for detecting abnormal noise in equipment by acoustic analysis of sound data. For example, in a certain acoustic diagnosis, the operation mode of the equipment is associated with each cluster of the feature amount extracted from the sound data by spectral decomposition, and the feature amount extracted from the target sound data is compared with each cluster. Therefore, it is determined whether or not an abnormal noise has occurred.
従って、特徴量の各クラスタに対する運転モードの対応付けが適切であれば異音を検知できるが、音響診断に関する従来の技術によっては、対応付けを適切に実行できない場合がある。 Therefore, abnormal noise can be detected if the operation mode is appropriately associated with each cluster of features, but the association may not be properly executed depending on the conventional technique for acoustic diagnosis.
本発明の目的は、1つの側面では、音データから抽出された特徴量の各クラスタに対する運転モードの対応付けを正しく行うための技術を提供することである。 An object of the present invention is, in one aspect, to provide a technique for correctly associating an operation mode with each cluster of features extracted from sound data.
一態様に係る評価方法は、音データから各時刻における特徴量を抽出し、抽出された特徴量に対するクラスタリングにより特徴量のクラスタを複数生成し、各時刻において特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、対象が非定常運転中であることを示す第2のデータ、または対象が停止中であることを示す第3のデータを対応付ける処理を含む。 In the evaluation method according to one aspect, the feature amount at each time is extracted from the sound data, a plurality of feature amount clusters are generated by clustering the extracted feature amount, and the feature amount is based on the change of the cluster to which the feature amount belongs at each time. The probability of transition from each of the multiple clusters to another cluster is calculated, and based on the probability of transition from each of the multiple clusters to another cluster, the target is in steady operation for each of the multiple clusters. The process includes associating the first data indicating that the target is present, the second data indicating that the target is in non-constant operation, or the third data indicating that the target is stopped.
1つの側面では、音データから抽出された特徴量の各クラスタに対する運転モードの対応付けを正しく行えるようになる。 On one aspect, it becomes possible to correctly associate the operation mode with each cluster of the feature amount extracted from the sound data.
本実施の形態における運転モードは、定常運転モードと、非定常運転モードと、停止モードとに分けられる。定常運転モードにおいて計測される音には、設備の回転体(例えばモータやエンジンなど)あるいは圧縮機等の機器が安定稼働している場合に発せられる音が含まれる。停止モードにおいては設備が停止しているため設備からは音は発せられず、周囲の環境音(例えば天候音、作業音、近隣生活音等)のみが含まれる。非定常モードとは、停止モードから定常運転モードへの遷移および定常運転モードから停止モードへの遷移の際に経由するモードであり、例えば、設備の起動処理中の状態あるいは設備の停止処理中の状態のことである。そのため、非定常モードにおいて計測される音には、設備の機器が安定稼働していない場合に発せられる音が含まれる。 The operation mode in the present embodiment is divided into a steady operation mode, a non-steady operation mode, and a stop mode. The sound measured in the steady operation mode includes a sound emitted when a rotating body of equipment (for example, a motor, an engine, etc.) or a device such as a compressor is operating stably. In the stop mode, since the equipment is stopped, no sound is emitted from the equipment, and only surrounding environmental sounds (for example, weather sounds, work sounds, neighborhood living sounds, etc.) are included. The unsteady mode is a mode through which the transition from the stop mode to the steady operation mode and the transition from the steady operation mode to the stop mode are performed. For example, the state during the start processing of the equipment or the stop processing of the equipment is in progress. It is a state. Therefore, the sound measured in the unsteady mode includes the sound emitted when the equipment of the equipment is not operating stably.
図1は、計測された音データから抽出した特徴量の3つのクラスタの例を示す図である。図1の例において横軸および縦軸は各次元の特徴量の値を表しており、2次元の特徴ベクトルに対するクラスタリングが実行されている。 FIG. 1 is a diagram showing an example of three clusters of features extracted from the measured sound data. In the example of FIG. 1, the horizontal axis and the vertical axis represent the values of the feature quantities in each dimension, and clustering for the two-dimensional feature vectors is executed.
このように、通常、クラスタリングの対象となる「特徴量」は1次元の値ではなく2次元以上のベクトルで表されるが、説明を簡単にするため以下では単に「特徴量」と呼ぶ。 As described above, the "feature amount" to be clustered is usually represented not by a one-dimensional value but by a vector having two or more dimensions, but for the sake of simplicity, it is simply referred to as a "feature amount" below.
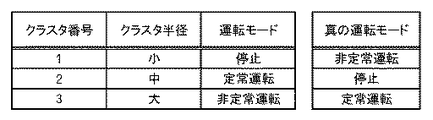
各クラスタに対して運転モードを対応付ける一つの方法として、クラスタのサイズに基づき運転モードの対応付けを実行する方法が考えられる。非定常運転モードにおいてはスペクトル分布が変動するためクラスタ半径が大きくなるという特徴を考慮すると、図1の例の場合、クラスタ1が非定常運転モードに対応付けられる。また、停止モードにおいては音源が存在しないため停止モードの音波形の実効値は定常運転モードの音波形の実効値より小さくなるという特徴を考慮すると、図1の例の場合、クラスタ2が停止モードに対応付けられ、クラスタ3が定常運転モードに対応付けられる。すなわち、図2に示すように運転モードの対応付けが行われる。ここでは、真の運転モードを対応付けることができたとする。
As one method of associating the operation mode with each cluster, a method of associating the operation mode based on the size of the cluster can be considered. Considering the feature that the cluster radius becomes large because the spectrum distribution fluctuates in the unsteady operation mode, in the case of the example of FIG. 1, the
但し、音データには、周囲の環境音によるノイズ要素が混入され、その影響によりクラスタ半径やクラスタ中心が変化する。図3は、計測された音データから抽出した特徴量の3つのクラスタの他の例を示す図である。図3の例は、図1の例と比較すると、ノイズ要素の混入によりクラスタ半径及びクラスタ中心が変化しており、この場合、クラスタ半径が最も大きいクラスタ3が非定常運転モードに対応付けられる。また、クラスタ1およびクラスタ2のうち、音波形の実効値がより大きいクラスタ2が定常運転モードに割り当てられ、クラスタ1が停止モードに割り当てられる。すなわち、図4に示すように運転モードの対応付けが行われる。ここでは、真の運転モードを対応付けることができなかったため、異音を適切に検知することができなくなる。
However, noise elements due to surrounding environmental sounds are mixed in the sound data, and the cluster radius and cluster center change due to the influence. FIG. 3 is a diagram showing another example of three clusters of features extracted from the measured sound data. Compared with the example of FIG. 1, the example of FIG. 3 changes the cluster radius and the cluster center due to the mixing of noise elements. In this case, the
このように、クラスタ半径を利用して運転モードの対応付けを行うと、対応付けの誤りが発生する可能性がある。そこで、以下では、運転モードの対応付けを正しく行う方法について説明する。 In this way, if the operation modes are associated using the cluster radius, an error in the association may occur. Therefore, a method of correctly associating the operation modes will be described below.
図5は、本実施の形態のシステムの概要を示す図である。例えば生産設備あるいはインフラ設備等である設備5には、設備5から発せられる音および環境音の音データを取得する音データ取得装置3が装着されている。音データ取得装置3はネットワークを介して分析装置1と接続され、取得した音データを分析装置1に送信する。分析装置1は、音データ取得装置3から受信した音データに基づき処理を実行する。なお、図5の例においては音データ取得装置3は設備5に装着されているが、設備5の周囲に設置されていてもよい。
FIG. 5 is a diagram showing an outline of the system of the present embodiment. For example, the equipment 5 such as a production facility or an infrastructure facility is equipped with a sound
図6は、分析装置1の機能ブロック図である。分析装置1は、受信部101と、クラスタリング部103と、算出部105と、対応付け部107と、評価部109と、音データ格納部111と、クラスタデータ格納部113と、確率データ格納部115と、対応関係データ格納部117と、評価結果格納部119とを含む。
FIG. 6 is a functional block diagram of the
受信部101、クラスタリング部103、算出部105、対応付け部107および評価部109は、例えば、図30におけるメモリ2501にロードされたプログラムが図30におけるCPU(Central Processing Unit)2503により実行されることで実現される。音データ格納部111、クラスタデータ格納部113、確率データ格納部115、対応関係データ格納部117および評価結果格納部119は、例えば、メモリ2501または図30におけるHDD(Hard Disk Drive)2505に設けられる。
In the receiving
受信部101は、音データ取得装置3から音データを受信し、受信した音データを音データ格納部111に格納する。クラスタリング部103は、音データ格納部111に格納されている音データに基づき処理を実行し、処理結果をクラスタデータ格納部113に格納する。算出部105は、クラスタデータ格納部113に格納されているデータに基づき処理を実行し、処理結果を確率データ格納部115に格納する。対応付け部107は、音データ格納部111に格納されているデータ、クラスタデータ格納部113に格納されているデータ及び確率データ格納部115に格納されているデータに基づき処理を実行し、処理結果を対応関係データ格納部117に格納する。評価部109は、クラスタデータ格納部113に格納されているデータ及び対応関係データ格納部117に格納されているデータに基づき処理を実行し、処理結果を評価結果格納部119に格納する。
The receiving
次に、図7乃至図26を用いて、本実施の形態の分析装置1が実行する処理の詳細を説明する。
Next, the details of the process executed by the
図7は、各クラスタに対して運転モードを対応付ける処理の処理フローを示す図である。本処理は、設備5から異音が発せられているか判定する処理に先立って実行される。 FIG. 7 is a diagram showing a processing flow of processing for associating an operation mode with each cluster. This process is executed prior to the process of determining whether or not an abnormal noise is being emitted from the equipment 5.
分析装置1のクラスタリング部103は、音データ取得装置3から受信した音データを音データ格納部111から読み出す(図7:ステップS1)。ステップS1において読み出される音データは、例えば図8に示すような音波形のデータである。
The
クラスタリング部103は、ステップS1において読み出された音データに対するスペクトル分解により各時刻の特徴量を抽出する(ステップS3)。特徴量が多次元のベクトルとして表される場合、ステップS3においては各次元について特徴量の時系列データが得られる。図9の例では、特徴量A、特徴量B、・・・の時系列データが得られている。なお、スペクトル分解の方法は周知であるので、ここではこれ以上詳しく説明しない。
The
クラスタリング部103は、抽出した特徴量をクラスタデータ格納部113に格納する。図10は、クラスタデータ格納部113に格納されるデータの一例を示す図である。図10の例では、各時刻について特徴量が格納されている。ステップS3の時点においてはクラスタリングが行われていないので、クラスタ番号は格納されていない。
The
クラスタリング部103は、ステップS3において抽出した特徴量に対するクラスタリングを実行して3つのクラスタを生成する(ステップS5)。クラスタリングは、例えば、k−meansクラスタリング或いは混合正規分布によるクラスタリング等である。
The
図11は、特徴量に対応する点の分布の一例を示す図である。各点は、時刻t(i)(i=1,2,...,N)の特徴量に対応している。このような例において、3つのクラスタを生成するようにクラスタリングを実行した場合、例えば図12に示すようにクラスタ1乃至3が生成される。
FIG. 11 is a diagram showing an example of the distribution of points corresponding to the feature amount. Each point corresponds to a feature amount at time t (i) (i = 1, 2, ..., N). In such an example, when clustering is executed so as to generate three clusters,
クラスタリング部103は、ステップS5において実行したクラスタリングの結果をクラスタデータ格納部113に格納する。図13は、クラスタデータ格納部113に格納されるデータの一例を示す図である。図13の例では、各時刻について、特徴量とクラスタ番号とが格納されている。クラスタ番号は、時刻t(i)における特徴量に対応する点が属するクラスタの番号である。
The
算出部105は、クラスタデータ格納部113に格納されているデータを用いて、各クラスタから他のクラスタへの遷移回数を算出する(ステップS9)。例えば図14に示すようにクラスタが遷移する場合、クラスタ1からクラスタ2への遷移回数は2であり、クラスタ1からクラスタ3への遷移回数は4である。クラスタ2からクラスタ1への遷移回数は3であり、クラスタ2からクラスタ3への遷移回数は1である。クラスタ3からクラスタ1への遷移回数は4であり、クラスタ3からクラスタ2への遷移回数は1である。
The
算出部105は、ステップS9の算出結果を用いて、各クラスタから他のクラスタへの遷移の確率を算出する(ステップS11)。例えば図14の例の場合、クラスタ1からクラスタ2への遷移確率は2/(2+4)≒0.33であり、クラスタ1からクラスタ3への遷移確率は4/(2+4)≒0.67である。クラスタ2からクラスタ1への遷移確率は3/(3+1)=0.75であり、クラスタ2からクラスタ3への遷移確率は1/(3+1)=0.25である。クラスタ3からクラスタ1への遷移確率は4/(4+1)=0.8であり、クラスタ3からクラスタ2への遷移確率は1/(4+1)=0.2である。
The
算出部105は、ステップS11において算出した遷移確率を確率データ格納部115に格納する。図15は、確率データ格納部115に格納されるデータの一例を示す図である。図15の例では、各クラスタについて、他のクラスタへの遷移確率が格納される。ステップS11の時点においては、遷移確率差の欄に値は格納されない。
The
算出部105は、確率データ格納部115に格納された遷移確率を用いて、各クラスタについて遷移確率差を算出し(ステップS13)、算出した遷移確率差を確率データ格納部115に格納する。そして処理は端子Aを介して図17のステップS15に移行する。
The
図16は、確率データ格納部115に格納されるデータの一例を示す図である。図16の例では、各クラスタについて、他のクラスタへの遷移確率と、遷移確率差とが格納される。
FIG. 16 is a diagram showing an example of data stored in the probability
図17の説明に移行し、対応付け部107は、3つの遷移確率差のうち最小の遷移確率差を有するクラスタを特定する(図17:ステップS15)。
Moving on to the description of FIG. 17, the
対応付け部107は、ステップS15において特定したクラスタの番号に対応付けて、非定常運転モードであることを示すデータを対応関係データ格納部117に格納する(ステップS17)。
The
ステップS15及びS17の処理は、クラスタの遷移の特徴に基づいている。図18は、クラスタの遷移を示す図である。上で述べたように、停止モードから定常運転モードへの遷移および定常運転モードから停止モードへの遷移の際には非定常運転モードを経由するので、停止モードから定常運転モードへの直接の遷移および定常運転モードから停止モードへの直接の遷移は理論上は発生し得ない。そのため、停止モードから定常運転モードへの遷移確率および定常運転モードから停止モードへの遷移確率は、その他の遷移確率よりも低くなると考えられる。このことから、停止モードについての遷移確率差および定常運転モードについての遷移確率差は、非定常運転モードについての遷移確率差より大きくなると考えられる。よって、ステップS15の処理によって非定常運転モードであるクラスタを特定することができる。 The processing of steps S15 and S17 is based on the characteristics of the cluster transition. FIG. 18 is a diagram showing the transition of clusters. As described above, the transition from the stop mode to the steady operation mode and the transition from the steady operation mode to the stop mode go through the unsteady operation mode, so that the direct transition from the stop mode to the steady operation mode is performed. And in theory, a direct transition from steady-state mode to stop mode cannot occur. Therefore, it is considered that the transition probability from the stop mode to the steady operation mode and the transition probability from the steady operation mode to the stop mode are lower than the other transition probabilities. From this, it is considered that the transition probability difference for the stop mode and the transition probability difference for the steady operation mode are larger than the transition probability difference for the unsteady operation mode. Therefore, the cluster in the unsteady operation mode can be specified by the process of step S15.
図19は、対応関係データ格納部117に格納されるデータの一例を示す図である。図19の例では、クラスタ番号と、運転モードを示す情報とが格納される。ステップS17の時点においては、定常運転モードを示す情報及び停止モードを示す情報は格納されない。
FIG. 19 is a diagram showing an example of data stored in the correspondence
対応付け部107は、ステップS15において特定されたクラスタ以外の2つのクラスタについて、実効値を算出する(ステップS19)。実効値は、例えば以下の式に従って算出される。
The

図20は、実効値について説明するための図である。上で述べたように、停止モードにおいては設備5から音は発せられないため、停止モードの音波形の実効値は定常運転モードの音波形の実効値より小さいと考えられる。従って、例えば図20の例の場合、図20(a)に対応するクラスタは停止モードのクラスタであり、図20(b)に対応するクラスタは定常運転モードのクラスタである。 FIG. 20 is a diagram for explaining an effective value. As described above, since no sound is emitted from the equipment 5 in the stop mode, it is considered that the effective value of the sound wave type in the stop mode is smaller than the effective value of the sound wave type in the steady operation mode. Therefore, for example, in the case of FIG. 20, the cluster corresponding to FIG. 20A is a cluster in stop mode, and the cluster corresponding to FIG. 20B is a cluster in steady operation mode.
対応付け部107は、ステップS19において算出された実効値がより大きい方のクラスタの番号に対応付けて、定常運転モードであることを示すデータを対応関係データ格納部117に格納する(ステップS21)。
The
対応付け部107は、ステップS19において算出された実効値がより小さい方のクラスタの番号に対応付けて、停止モードであることを示すデータを対応関係データ格納部117に格納する(ステップS23)。そして処理は終了する。ここまでの処理によって、対応関係データ格納部117には、例えば図21に示すようなデータが格納される。
The
ここで、以上の処理の効果について説明する。 Here, the effect of the above processing will be described.
図22は、環境音が無い場合の特徴量の3つのクラスタを示す図であり、図23は、環境音が有る場合の特徴量の3つのクラスタを示す図である。そして、図24に示すように、「〇」に対応するクラスタの真の運転モードは停止モードであり、「△」に対応するクラスタの真の運転モードは定常運転モードであり、「+」に対応するクラスタの真の運転モードは非定常運転モードである。「〇」に対応するクラスタの番号は1であり、「△」に対応するクラスタの番号は2であり、「+」に対応するクラスタの番号は3である。 FIG. 22 is a diagram showing three clusters of features when there is no environmental sound, and FIG. 23 is a diagram showing three clusters of features when there is environmental sound. Then, as shown in FIG. 24, the true operation mode of the cluster corresponding to “◯” is the stop mode, and the true operation mode of the cluster corresponding to “Δ” is the steady operation mode, which is set to “+”. The true mode of operation of the corresponding cluster is the transient mode of operation. The cluster number corresponding to "○" is 1, the cluster number corresponding to "Δ" is 2, and the cluster number corresponding to "+" is 3.
クラスタ半径に基づいて対応付けを実行した場合、環境音が無い図22の例であれば正しく対応付けを行うことができる。しかしながら、環境音が有る図23の例の場合、「△」に対応するクラスタのクラスタ半径が大きくなっているため、「△」に対応するクラスタに対して誤って非定常運転モードを対応付けてしまう可能性がある。 When the association is executed based on the cluster radius, the association can be correctly performed in the example of FIG. 22 where there is no environmental sound. However, in the case of the example of FIG. 23 where there is an environmental sound, since the cluster radius of the cluster corresponding to “Δ” is large, the unsteady operation mode is erroneously associated with the cluster corresponding to “Δ”. There is a possibility that it will end up.
これに対し、本実施の形態の処理によれば、例えば図25に示すように遷移確率差が算出される。図24の例の場合、番号が3であるクラスタ(すなわち、「+」に対応するクラスタ)の遷移確率差が最小であるので、「+」に対応するクラスタに対して非定常運転モードを対応付けることができる。また、実効値の大きさに基づき、番号が2であるクラスタ(すなわち、「△」に対応するクラスタ)に対して定常運転モードを対応付け、番号が1であるクラスタ(すなわち、「〇」に対応するクラスタ)に対して停止モードを対応付けることができる。すなわち、図26に示すように対応付けが行われ、この対応付けは、図24に示した真の運転モードに一致する。 On the other hand, according to the process of the present embodiment, the transition probability difference is calculated as shown in FIG. 25, for example. In the case of the example of FIG. 24, since the transition probability difference of the cluster having the number 3 (that is, the cluster corresponding to “+”) is the smallest, the unsteady operation mode is associated with the cluster corresponding to “+”. be able to. Further, based on the magnitude of the effective value, the steady operation mode is associated with the cluster having the number 2 (that is, the cluster corresponding to "Δ"), and the cluster having the number 1 (that is, "○") is associated with the steady operation mode. The stop mode can be associated with the corresponding cluster). That is, the association is performed as shown in FIG. 26, and this association corresponds to the true operation mode shown in FIG. 24.
次に、図27乃至図29を用いて、設備5から異音が発せられているか判定する処理について説明する。 Next, a process of determining whether or not an abnormal noise is being emitted from the equipment 5 will be described with reference to FIGS. 27 to 29.
図27は、設備5から異音が発せられているか判定する処理の処理フローを示す図である。本処理は、図7乃至図26を用いて説明した処理が実行された後に実行される。 FIG. 27 is a diagram showing a processing flow of a process of determining whether or not an abnormal noise is emitted from the equipment 5. This process is executed after the process described with reference to FIGS. 7 to 26 is executed.
まず、クラスタリング部103は、音データ格納部111に格納されており且つ新たに音データ取得装置3から受信した音データを読み出す(図27:ステップS31)。ステップS31において読み出される音データは、図7乃至図26を用いて説明した処理が実行された音データとは別の音データである。
First, the
クラスタリング部103は、ステップS31において読み出された音データに対するスペクトル分解により各時刻の特徴量を抽出する(ステップS33)。クラスタリング部103は、抽出した特徴量を評価部109に渡す。
The
評価部109は、対応関係データ格納部117において定常運転モードを示すデータに対応付けられているクラスタ番号を特定し、特定したクラスタ番号の特徴量を、クラスタデータ格納部113から読み出す(ステップS35)。
The
なお、ステップS33において抽出された特徴量に対応する点が複数である場合には、以下のステップS37乃至S43の処理は各点について実行される。 When there are a plurality of points corresponding to the feature amounts extracted in step S33, the following processes in steps S37 to S43 are executed for each point.
評価部109は、ステップS33において抽出された特徴量とステップS35において読み出された特徴量とを用いて、ステップS33において抽出された特徴量の異常度を算出する(ステップS37)。
The
図28を用いて、異常度について説明する。図28は、3つのクラスタと評価対象の点との位置関係を示す図である。図28においては、クラスタ1は非定常運転モードのクラスタであり、クラスタ2は停止モードのクラスタであり、クラスタ3は定常運転モードのクラスタであるとする。点2801は定常運転モードのクラスタからは離れた位置に存在し、点2802は定常運転モードのクラスタの中に存在する。
The degree of abnormality will be described with reference to FIG. 28. FIG. 28 is a diagram showing the positional relationship between the three clusters and the points to be evaluated. In FIG. 28, it is assumed that
本実施の形態においては、定常運転モードのクラスタに属する点が密に存在する空間に存在する点は異常度が低く、且つ、定常運転モードのクラスタに属する点が疎である空間に存在する点は異常度が高くなるように算出される。従って、図28の例であれば点2801の異常度は点2802の異常度よりも高くなる。なお、このような異常度の算出方法は周知であるので、ここではこれ以上詳しく説明しない。
In the present embodiment, the points belonging to the clusters in the steady operation mode are present in the space where the points are densely present, and the points belonging to the clusters in the steady operation mode are sparsely present. Is calculated so that the degree of abnormality is high. Therefore, in the example of FIG. 28, the degree of abnormality at
評価部109は、ステップS37において算出した異常度が閾値以上であるか判定する(ステップS39)。ステップS37において算出した異常度が閾値以上である場合(ステップS39:Yesルート)、評価部109は、以下の処理を実行する。具体的には、評価部109は、評価対象の点の識別情報に対応付けて、異音であることを示すデータを評価結果格納部119に格納する(ステップS41)。
The
一方、ステップS37において算出した異常度が閾値以上ではない場合(ステップS39:Noルート)、評価部109は、以下の処理を実行する。具体的には、評価部109は、評価対象の点の識別情報に対応付けて、正常音であることを示すデータを評価結果格納部119に格納する(ステップS43)。そして処理は終了する。
On the other hand, when the degree of abnormality calculated in step S37 is not equal to or greater than the threshold value (step S39: No route), the
図29は、評価結果格納部119に格納されるデータの一例を示す図である。図29の例では、評価対象の点の識別情報と、異常度と、異音であることを示すデータ又は正常音であることを示すデータとが格納される。
FIG. 29 is a diagram showing an example of data stored in the evaluation
以上のように、運転モードの切り替わりの順序特性を利用することで、各クラスタに対する運転モードの対応付けを正しく行えるようになり、結果として、音響診断を高精度で実施することができるようになる。特に、環境音が有る場合には従来技術によっては適切に対応付けを行うことができなかったが、本実施の形態の方法によれば可能である。 As described above, by using the order characteristic of switching operation modes, it becomes possible to correctly associate the operation modes with each cluster, and as a result, it becomes possible to carry out acoustic diagnosis with high accuracy. .. In particular, when there is an environmental sound, it has not been possible to appropriately associate it with the prior art, but it is possible by the method of the present embodiment.
以上本発明の一実施の形態を説明したが、本発明はこれに限定されるものではない。例えば、上で説明した分析装置1の機能ブロック構成は実際のプログラムモジュール構成に一致しない場合もある。
Although one embodiment of the present invention has been described above, the present invention is not limited thereto. For example, the functional block configuration of the
また、上で説明した各テーブルの構成は一例であって、上記のような構成でなければならないわけではない。さらに、処理フローにおいても、処理結果が変わらなければ処理の順番を入れ替えることも可能である。さらに、並列に実行させるようにしても良い。 Further, the configuration of each table described above is an example, and does not have to be the configuration as described above. Further, in the processing flow, the order of processing can be changed as long as the processing result does not change. Further, it may be executed in parallel.
また、運転モードを適切に特定することが可能な本実施形態の方法は、異音検知にのみ適用可能な方法ではなく、運転モニタリング全般に適用可能である。 Further, the method of the present embodiment capable of appropriately specifying the operation mode is not a method applicable only to abnormal noise detection, but is applicable to general operation monitoring.
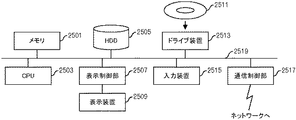
なお、上で述べた分析装置1は、コンピュータ装置であって、図30に示すように、メモリ2501とCPU2503とHDD2505と表示装置2509に接続される表示制御部2507とリムーバブル・ディスク2511用のドライブ装置2513と入力装置2515とネットワークに接続するための通信制御部2517とがバス2519で接続されている。オペレーティング・システム(OS:Operating System)及び本実施例における処理を実施するためのアプリケーション・プログラムは、HDD2505に格納されており、CPU2503により実行される際にはHDD2505からメモリ2501に読み出される。CPU2503は、アプリケーション・プログラムの処理内容に応じて表示制御部2507、通信制御部2517、ドライブ装置2513を制御して、所定の動作を行わせる。また、処理途中のデータについては、主としてメモリ2501に格納されるが、HDD2505に格納されるようにしてもよい。本発明の実施例では、上で述べた処理を実施するためのアプリケーション・プログラムはコンピュータ読み取り可能なリムーバブル・ディスク2511に格納されて頒布され、ドライブ装置2513からHDD2505にインストールされる。インターネットなどのネットワーク及び通信制御部2517を経由して、HDD2505にインストールされる場合もある。このようなコンピュータ装置は、上で述べたCPU2503、メモリ2501などのハードウエアとOS及びアプリケーション・プログラムなどのプログラムとが有機的に協働することにより、上で述べたような各種機能を実現する。
The
以上述べた本発明の実施の形態をまとめると、以下のようになる。 The embodiments of the present invention described above can be summarized as follows.
本実施の形態の第1の態様に係る評価方法は、(A)音データから各時刻における特徴量を抽出し、抽出された特徴量に対するクラスタリングにより特徴量のクラスタを複数生成し、(B)各時刻において特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、(C)複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、対象が非定常運転中であることを示す第2のデータ、または対象が停止中であることを示す第3のデータを対応付ける処理を含む。 In the evaluation method according to the first aspect of the present embodiment, (A) the feature amount at each time is extracted from the sound data, and a plurality of feature amount clusters are generated by clustering the extracted feature amount, and (B). Based on the change of the cluster to which the feature belongs at each time, the probability of transition from each of the plurality of clusters to another cluster is calculated, and (C) based on the probability of transition from each of the plurality of clusters to another cluster. For each of the plurality of clusters, the first data indicating that the target is in steady operation, the second data indicating that the target is in non-steady operation, or that the target is stopped. The process of associating the third data to be shown is included.
定常運転中から停止中への遷移および停止中から定常運転中への遷移は理論上は発生しないという特徴が有る。そこで、クラスタ間の遷移の確率を利用することで、音データから抽出した特徴量の各クラスタに対する運転モードの対応付けを正しく行えるようになる。 The characteristic is that the transition from steady operation to stop and the transition from stop to steady operation do not theoretically occur. Therefore, by using the probability of transition between clusters, it becomes possible to correctly associate the operation mode with each cluster of the feature amount extracted from the sound data.
また、複数のクラスタの各々に対して対応付ける処理において、(c1)複数のクラスタの各々について、当該クラスタから他のクラスタへの遷移の確率の差を算出し、算出された差が最小である第1のクラスタに対して、第2のデータを対応付けてもよい。 Further, in the process of associating each of the plurality of clusters, (c1) for each of the plurality of clusters, the difference in the probability of transition from the cluster to another cluster is calculated, and the calculated difference is the smallest. The second data may be associated with one cluster.
非定常運転についてのクラスタは、定常運転についてのクラスタおよび停止についてのクラスタと比較して、遷移の確率の差が小さくなりやすいという特徴が有る。従って、上記の処理を実行すれば、非定常運転についての対応付けを正しく行えるようになる。 The cluster for unsteady operation is characterized in that the difference in the probability of transition tends to be smaller than that for the cluster for steady operation and the cluster for stoppage. Therefore, if the above processing is executed, the association for the unsteady operation can be correctly performed.
また、複数のクラスタの各々に対して対応付ける処理において、(c2)第1のクラスタ以外のクラスタの各々について、当該クラスタに属する特徴量についての音データの実効値を算出し、算出された実効値がより大きい方のクラスタである第2のクラスタに対して第1のデータを対応付け、算出された実効値がより小さい方のクラスタである第3のクラスタに対して第3のデータを対応付けてもよい。 Further, in the process of associating each of the plurality of clusters, (c2) for each of the clusters other than the first cluster, the effective value of the sound data for the feature amount belonging to the cluster is calculated, and the calculated effective value is calculated. The first data is associated with the second cluster, which is the larger cluster, and the third data is associated with the third cluster, which is the cluster with the smaller effective value. You may.
定常運転についての実効値は停止についての実効値より大きくなりやすいという特徴が有る。従って、上記の処理を実行すれば、定常運転および停止についての対応付けを正しく行えるようになる。 The effective value for steady operation tends to be larger than the effective value for stoppage. Therefore, if the above processing is executed, the correspondence between the steady operation and the stop can be correctly performed.
また、複数のクラスタの各々から他のクラスタへの遷移の確率を算出する処理において、(b1)各時刻において特徴量が属するクラスタの識別情報を含む第4のデータを生成し、(b2)第4のデータに基づき、複数のクラスタの各々について、当該クラスタから他の各クラスタへ遷移した回数を当該クラスタについての全遷移回数で除することで、複数のクラスタの各々から他のクラスタへの遷移の確率を算出してもよい。 Further, in the process of calculating the probability of transition from each of the plurality of clusters to another cluster, (b1) the fourth data including the identification information of the cluster to which the feature amount belongs at each time is generated, and (b2) the second. Transition from each of the plurality of clusters to another cluster by dividing the number of transitions from the cluster to each other cluster by the total number of transitions for the cluster for each of the plurality of clusters based on the data of 4. You may calculate the probability of.
各クラスタから他のクラスタへの遷移の確率を適切に算出できるようになる。 The probability of transition from each cluster to another cluster can be calculated appropriately.
また、本評価方法は、(D)音データとは異なる他の音データを取得した場合、他の音データから特徴量を抽出し、(E)他の音データから抽出した特徴量と、第1のデータが対応付けられたクラスタに属する特徴量とに基づき算出した異常度により、対象について異音が発生したか判定してもよい。 Further, in this evaluation method, when (D) other sound data different from the sound data is acquired, the feature amount is extracted from the other sound data, and (E) the feature amount extracted from the other sound data and the first It may be determined whether or not an abnormal noise has occurred in the target based on the degree of abnormality calculated based on the feature amount belonging to the cluster to which the data of 1 is associated.
対象について異音が発生したか否かを高精度で判定できるようになる。 It becomes possible to determine with high accuracy whether or not an abnormal noise has occurred in the target.
本実施の形態の第2の態様に係る評価装置は、(E)音データから各時刻における特徴量を抽出し、抽出された特徴量に対するクラスタリングにより特徴量のクラスタを複数生成する生成部(実施の形態におけるクラスタリング部103は生成部の一例である)と、(F)各時刻において特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出する算出部(実施の形態における算出部105は算出部の一例である)と、(G)複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、対象が非定常運転中であることを示す第2のデータ、または対象が停止中であることを示す第3のデータを対応付ける対応付け部(実施の形態における対応付け部107は対応付け部の一例である)とを有する。
The evaluation device according to the second aspect of the present embodiment is (E) a generation unit that extracts the feature amount at each time from the sound data and generates a plurality of feature amount clusters by clustering the extracted feature amount (implementation). The
なお、上記方法による処理をコンピュータに実行させるためのプログラムを作成することができ、当該プログラムは、例えばフレキシブルディスク、CD−ROM、光磁気ディスク、半導体メモリ、ハードディスク等のコンピュータ読み取り可能な記憶媒体又は記憶装置に格納される。尚、中間的な処理結果はメインメモリ等の記憶装置に一時保管される。 A program for causing a computer to execute the processing by the above method can be created, and the program can be a computer-readable storage medium such as a flexible disk, a CD-ROM, a magneto-optical disk, a semiconductor memory, or a hard disk. Stored in storage. The intermediate processing result is temporarily stored in a storage device such as a main memory.
以上の実施例を含む実施形態に関し、さらに以下の付記を開示する。 The following additional notes will be further disclosed with respect to the embodiments including the above embodiments.
(付記1)
コンピュータに、
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成し、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、前記対象が非定常運転中であることを示す第2のデータ、または前記対象が停止中であることを示す第3のデータを対応付ける、
処理を実行させる評価プログラム。
(Appendix 1)
On the computer
The feature amount at each time is extracted from the sound data, and a plurality of clusters of the feature amount are generated by clustering the extracted feature amount.
Based on the change of the cluster to which the feature quantity belongs at each time, the probability of transition from each of the plurality of clusters to another cluster is calculated.
First data indicating that the target is in steady operation for each of the plurality of clusters based on the probability of transition from each of the plurality of clusters to another cluster, the target is in non-steady operation. The second data indicating that the object is stopped, or the third data indicating that the target is stopped is associated with the data.
An evaluation program that executes processing.
(付記2)
前記複数のクラスタの各々に対して対応付ける処理において、
前記複数のクラスタの各々について、当該クラスタから他のクラスタへの遷移の確率の差を算出し、算出された前記差が最小である第1のクラスタに対して、前記第2のデータを対応付ける、
付記1記載の評価プログラム。
(Appendix 2)
In the process of associating with each of the plurality of clusters
For each of the plurality of clusters, the difference in the probability of transition from the cluster to another cluster is calculated, and the second data is associated with the first cluster having the smallest calculated difference.
The evaluation program described in
(付記3)
前記複数のクラスタの各々に対して対応付ける処理において、
前記第1のクラスタ以外のクラスタの各々について、当該クラスタに属する前記特徴量についての音データの実効値を算出し、算出された前記実効値がより大きい方のクラスタである第2のクラスタに対して前記第1のデータを対応付け、算出された前記実効値がより小さい方のクラスタである第3のクラスタに対して前記第3のデータを対応付ける、
付記2記載の評価プログラム。
(Appendix 3)
In the process of associating with each of the plurality of clusters
For each of the clusters other than the first cluster, the effective value of the sound data for the feature amount belonging to the cluster is calculated, and the calculated effective value is larger than that of the second cluster. The first data is associated with each other, and the third data is associated with the third cluster, which is the cluster having the smaller effective value calculated.
The evaluation program described in
(付記4)
前記複数のクラスタの各々から他のクラスタへの遷移の確率を算出する処理において、
各時刻において前記特徴量が属するクラスタの識別情報を含む第4のデータを生成し、
前記第4のデータに基づき、前記複数のクラスタの各々について、当該クラスタから他の各クラスタへ遷移した回数を当該クラスタについての全遷移回数で除することで、前記複数のクラスタの各々から他のクラスタへの遷移の確率を算出する、
付記1乃至3のいずれか1つ記載の評価プログラム。
(Appendix 4)
In the process of calculating the probability of transition from each of the plurality of clusters to another cluster.
At each time, a fourth data including the identification information of the cluster to which the feature amount belongs is generated.
Based on the fourth data, for each of the plurality of clusters, the number of transitions from the cluster to each of the other clusters is divided by the total number of transitions for the cluster, so that each of the plurality of clusters can be replaced with another. Calculate the probability of transition to a cluster,
The evaluation program according to any one of
(付記5)
前記音データとは異なる他の音データを取得した場合、前記他の音データから前記特徴量を抽出し、
前記他の音データから抽出した前記特徴量と、前記第1のデータが対応付けられたクラスタに属する前記特徴量とに基づき算出した異常度により、前記対象について異音が発生したか判定する、
付記1記載の評価プログラム。
(Appendix 5)
When other sound data different from the sound data is acquired, the feature amount is extracted from the other sound data, and the feature amount is extracted.
It is determined whether or not an abnormal sound has occurred in the target based on the degree of abnormality calculated based on the feature amount extracted from the other sound data and the feature amount belonging to the cluster to which the first data is associated.
The evaluation program described in
(付記6)
コンピュータが、
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成し、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、前記対象が非定常運転中であることを示す第2のデータ、または前記対象が停止中であることを示す第3のデータを対応付ける、
処理を実行する評価方法。
(Appendix 6)
The computer
The feature amount at each time is extracted from the sound data, and a plurality of clusters of the feature amount are generated by clustering the extracted feature amount.
Based on the change of the cluster to which the feature quantity belongs at each time, the probability of transition from each of the plurality of clusters to another cluster is calculated.
First data indicating that the target is in steady operation for each of the plurality of clusters based on the probability of transition from each of the plurality of clusters to another cluster, the target is in non-steady operation. The second data indicating that the object is stopped, or the third data indicating that the target is stopped is associated with the data.
Evaluation method to execute the process.
(付記7)
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成する生成部と、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出する算出部と、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、前記対象が非定常運転中であることを示す第2のデータ、または前記対象が停止中であることを示す第3のデータを対応付ける対応付け部と、
を有する評価装置。
(Appendix 7)
A generation unit that extracts features at each time from sound data and generates a plurality of clusters of the features by clustering the extracted features.
A calculation unit that calculates the probability of transition from each of a plurality of clusters to another cluster based on the change in the cluster to which the feature quantity belongs at each time.
First data indicating that the target is in steady operation for each of the plurality of clusters, based on the probability of transition from each of the plurality of clusters to another cluster, the target is in non-steady operation. The associating unit that associates the second data indicating that the target is, or the third data indicating that the target is stopped.
Evaluation device with.
1 分析装置 101 受信部
103 クラスタリング部 105 算出部
107 対応付け部 109 評価部
111 音データ格納部 113 クラスタデータ格納部
115 確率データ格納部 117 対応関係データ格納部
119 評価結果格納部
1
Claims (7)
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成し、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタのうち、対象が非定常運転中であるクラスタを特定し、特定した前記クラスタに対して、前記対象が非定常運転中であることを示す第1のデータを対応付ける、
処理を実行させる評価プログラム。 On the computer
The feature amount at each time is extracted from the sound data, and a plurality of clusters of the feature amount are generated by clustering the extracted feature amount.
Based on the change of the cluster to which the feature quantity belongs at each time, the probability of transition from each of the plurality of clusters to another cluster is calculated.
Based on the probability of transition from each of the plurality of clusters to another cluster, the cluster in which the target is in non-steady operation is identified among the plurality of clusters, and the target is not related to the specified cluster. Correspond with the first data indicating that it is in steady operation,
An evaluation program that executes processing.
前記複数のクラスタの各々について、当該クラスタから他のクラスタへの遷移の確率の差を算出し、
算出された前記差が最小である第1のクラスタを特定し、特定された前記第1のクラスタに対して、前記第1のデータを対応付ける、
請求項1記載の評価プログラム。 In the process of associating the first data
For each of the plurality of clusters, the difference in the probability of transition from the cluster to another cluster is calculated.
The first cluster with the smallest calculated difference is identified, and the first data is associated with the identified first cluster.
The evaluation program according to claim 1.
前記第1のクラスタ以外のクラスタの各々について、当該クラスタに属する前記特徴量についての音データの実効値を算出し、
算出された前記実効値がより大きい方のクラスタである第2のクラスタに対して、
前記対象が定常運転中であることを示す第2のデータを対応付け、算出された前記実効値がより小さい方のクラスタである第3のクラスタに対して、前記対象が停止中であることを示す第3のデータを対応付ける、
処理をさらに実行させる請求項2記載の評価プログラム。 On the computer
For each of the clusters other than the first cluster, the effective value of the sound data for the feature amount belonging to the cluster was calculated.
For the second cluster, which is the cluster with the larger calculated effective value ,
The target is stopped with respect to the third cluster, which is the cluster having the smaller effective value calculated by associating the second data indicating that the target is in steady operation. Associate the third data shown,
The evaluation program according to claim 2, wherein the processing is further executed.
各時刻において前記特徴量が属するクラスタの識別情報を含む第4のデータを生成し、
前記第4のデータに基づき、前記複数のクラスタの各々について、当該クラスタから他の各クラスタへ遷移した回数を当該クラスタについての全遷移回数で除することで、前記複数のクラスタの各々から他のクラスタへの遷移の確率を算出する、
請求項1乃至3のいずれか1つ記載の評価プログラム。 In the process of calculating the probability of transition from each of the plurality of clusters to another cluster.
At each time, a fourth data including the identification information of the cluster to which the feature amount belongs is generated.
Based on the fourth data, for each of the plurality of clusters, the number of transitions from the cluster to each of the other clusters is divided by the total number of transitions for the cluster, so that each of the plurality of clusters can be replaced with another. Calculate the probability of transition to a cluster,
The evaluation program according to any one of claims 1 to 3.
前記他の音データから抽出した前記特徴量と、前記第2のデータが対応付けられたクラスタに属する前記特徴量とに基づき算出した異常度により、前記対象について異音が発生したか判定する、
処理を前記コンピュータにさらに実行させる請求項3記載の評価プログラム。 When other sound data different from the sound data is acquired, the feature amount is extracted from the other sound data, and the feature amount is extracted.
It is determined whether or not an abnormal sound has occurred in the target based on the degree of abnormality calculated based on the feature amount extracted from the other sound data and the feature amount belonging to the cluster to which the second data is associated.
The evaluation program according to claim 3, wherein the computer further executes the process.
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成し、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタのうち、対象が非定常運転中であるクラスタを特定し、特定した前記クラスタに対して、前記対象が非定常運転中であることを示す第1のデータを対応付ける、
処理を実行する評価方法。 The computer
The feature amount at each time is extracted from the sound data, and a plurality of clusters of the feature amount are generated by clustering the extracted feature amount.
Based on the change of the cluster to which the feature quantity belongs at each time, the probability of transition from each of the plurality of clusters to another cluster is calculated.
Based on the probability of transition from each of the plurality of clusters to another cluster, the cluster in which the target is in non-steady operation is identified among the plurality of clusters, and the target is not related to the specified cluster. Correspond with the first data indicating that it is in steady operation,
Evaluation method to execute the process.
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出する算出部と、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタのうち、対象が非定常運転中であるクラスタを特定し、特定した前記クラスタに対して、前記対象が非定常運転中であることを示す第1のデータを対応付ける対応付け部と、
を有する評価装置。 A generator that extracts features at each time from sound data and generates a plurality of clusters of the features by clustering the extracted features.
A calculation unit that calculates the probability of transition from each of a plurality of clusters to another cluster based on the change in the cluster to which the feature quantity belongs at each time.
Based on the probability of transition from each of the plurality of clusters to another cluster, the cluster in which the target is in non-steady operation is identified among the plurality of clusters, and the target is not related to the specified cluster. An associating unit that associates the first data indicating that steady operation is in progress,
Evaluation device with.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017088087A JP6880992B2 (en) | 2017-04-27 | 2017-04-27 | Evaluation method, evaluation device and evaluation program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017088087A JP6880992B2 (en) | 2017-04-27 | 2017-04-27 | Evaluation method, evaluation device and evaluation program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018185711A JP2018185711A (en) | 2018-11-22 |
| JP6880992B2 true JP6880992B2 (en) | 2021-06-02 |
Family
ID=64355958
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017088087A Active JP6880992B2 (en) | 2017-04-27 | 2017-04-27 | Evaluation method, evaluation device and evaluation program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6880992B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4322396A4 (en) * | 2021-04-08 | 2024-05-08 | Mitsubishi Electric Corporation | Abnormality diagnosis device and abnormality diagnosis method |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5085577B2 (en) * | 2009-01-16 | 2012-11-28 | Kddi株式会社 | Playlist creation device, music playback device, playlist creation method, and playlist creation program |
| JP4876136B2 (en) * | 2009-02-17 | 2012-02-15 | 株式会社日立製作所 | Abnormality diagnosis apparatus and abnormality diagnosis method |
| JP5499900B2 (en) * | 2010-05-25 | 2014-05-21 | Jfeスチール株式会社 | Pattern automatic extraction method and pattern automatic extraction system |
| JP2012177748A (en) * | 2011-02-25 | 2012-09-13 | Oki Data Corp | Image forming apparatus |
| US9557698B2 (en) * | 2014-11-20 | 2017-01-31 | Ricoh Company, Limited | Information processing apparatus, information processing method, and computer-readable storage medium for detecting an abnormity from sound data |
| JP6448477B2 (en) * | 2015-06-19 | 2019-01-09 | 株式会社東芝 | Action determination device and action determination method |
-
2017
- 2017-04-27 JP JP2017088087A patent/JP6880992B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018185711A (en) | 2018-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11782430B2 (en) | Abnormality diagnosis method, abnormality diagnosis device and non-transitory computer readable storage medium | |
| JP5858839B2 (en) | Work machine abnormality diagnosis device | |
| JP6141235B2 (en) | How to detect anomalies in time series data | |
| EP3859472A1 (en) | Monitoring system and monitoring method | |
| US20120296605A1 (en) | Method, computer program, and system for performing interpolation on sensor data for high system availability | |
| CN109583470A (en) | A kind of explanation feature of abnormality detection determines method and apparatus | |
| WO2019098226A1 (en) | Damage diagnosing device, damage diagnosing method, and recording medium having damage diagnosing program stored thereon | |
| US8621305B2 (en) | Methods systems and apparatus for determining whether built-in-test fault codes are indicative of an actual fault condition or a false alarm | |
| CN112449696A (en) | Time series data diagnosis device, additional learning method, and program | |
| CN111027531A (en) | Pointer instrument information identification method and device and electronic equipment | |
| CN109556895A (en) | The failure analysis methods and device of rotating machinery | |
| US20190064789A1 (en) | System analyzing device, system analyzing method, and computer-readable recording medium | |
| JP6880992B2 (en) | Evaluation method, evaluation device and evaluation program | |
| US20220147034A1 (en) | Automated refinement of a labeled window of time series data | |
| JP7026012B2 (en) | Equipment status monitoring system and equipment status monitoring method | |
| KR101977214B1 (en) | Outlier detecting method, device and system using the method | |
| US11585732B2 (en) | Apparatus and method for diagnosing failure of plant | |
| CN111693726A (en) | Ventilation system fault diagnosis wind speed sensor arrangement method based on neighborhood rough set | |
| JP2019148199A (en) | Performance evaluation method, performance evaluation device and performance evaluation system | |
| JP6471035B2 (en) | Leakage occurrence position estimation device, system and method | |
| US10845792B2 (en) | Failure diagnosis apparatus, monitoring apparatus, failure diagnosis method and recording medium | |
| KR101882384B1 (en) | Apparatus and method for integrated cross calibration in redundant sensors | |
| US11463032B2 (en) | Detecting rotor anomalies by determining vibration trends during transient speed operation | |
| US9092315B2 (en) | Method and software program product for determining the quality of an information technology system | |
| JP2007164346A (en) | Decision tree changing method, abnormality determination method, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210406 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210419 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6880992 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |