JP6838918B2 - Image data processing device and method - Google Patents
Image data processing device and method Download PDFInfo
- Publication number
- JP6838918B2 JP6838918B2 JP2016195495A JP2016195495A JP6838918B2 JP 6838918 B2 JP6838918 B2 JP 6838918B2 JP 2016195495 A JP2016195495 A JP 2016195495A JP 2016195495 A JP2016195495 A JP 2016195495A JP 6838918 B2 JP6838918 B2 JP 6838918B2
- Authority
- JP
- Japan
- Prior art keywords
- image data
- reliability
- pixel
- resolution image
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 89
- 238000000034 method Methods 0.000 title claims description 84
- 238000011156 evaluation Methods 0.000 claims description 47
- 238000012937 correction Methods 0.000 claims description 41
- 238000003672 processing method Methods 0.000 claims description 16
- 238000003384 imaging method Methods 0.000 claims description 6
- 230000011218 segmentation Effects 0.000 claims description 5
- 230000002093 peripheral effect Effects 0.000 claims description 4
- 238000005070 sampling Methods 0.000 claims description 4
- 230000006870 function Effects 0.000 description 27
- 238000004364 calculation method Methods 0.000 description 15
- 238000000605 extraction Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 239000003086 colorant Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000003702 image correction Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000004075 alteration Effects 0.000 description 1
- 230000002146 bilateral effect Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 238000007429 general method Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 238000001454 recorded image Methods 0.000 description 1
- 239000010454 slate Substances 0.000 description 1
Images










Landscapes
- Image Processing (AREA)
- Television Systems (AREA)
- Editing Of Facsimile Originals (AREA)
Description
本発明は、画像データ処理装置及び方法に関する。 The present invention relates to an image data processing apparatus and method.
撮影画像を取得する際に同時に、撮像機器から被写体までの距離情報の分布を表す距離画像や撮像機器と被写体の相対的な動き情報の分布を表す動き画像を取得または算出する手法が提案されている。取得された情報は撮影画像と比較して空間分解能が低いことが多く、そのために撮影画像に合わせてアップサンプリング処理(拡大処理)を行って情報量を増やす必要がある。ただし、アップサンプリングを行うと、特に距離や動きの境界部での情報が正しく得られないという問題が生じる。この問題を解決する手法が提案されている。 At the same time as acquiring the captured image, a method of acquiring or calculating a distance image representing the distribution of distance information from the imaging device to the subject and a motion image representing the distribution of relative motion information between the imaging device and the subject has been proposed. There is. The acquired information often has a lower spatial resolution than the captured image, and therefore it is necessary to perform upsampling processing (enlargement processing) according to the captured image to increase the amount of information. However, upsampling causes a problem that information cannot be obtained correctly, especially at the boundary of distance and movement. A method to solve this problem has been proposed.
特許文献1ではジョイントバイラテラルフィルタを用いて、アップサンプリングと同時に距離情報の補正を行っている。非特許文献1では距離画像のエッジ強度にガウシアンフィルタを掛け、その値に応じて情報の信頼性を表す信頼度マップを生成している。距離情報・信頼度マップ・輝度情報を用いて、距離情報のアップサンプリングと補正を行っている。特許文献2では、互いに異なる複数の補間方法を用いて低解像度画像データをアップサンプリングすることにより高解像度画像データを生成している。
In
しかしながら、特許文献1では距離境界部がぼけてしまうという問題がある。これは、輝度画像中の類似色に対応した画素を用いて平均化処理を行う際に、境界部近傍の間違った距離(類似色を有する異なる物体の距離)を用いた平均化処理が行われてしまう事が主たる原因である。
However,
さらに非特許文献1では信頼度情報という形で特許文献1のようなエラーを回避しているものの、エッジ抽出手法やガウシアンフィルタ、閾値処理のパラメータ設定の影響を受け精度が低下するという問題がある。また、エッジ抽出やフィルタ処理など計算量が多くなってしまうという問題もある。
Further, although
本発明の目的は、拡大された画像データにおける各画素の情報の信頼度を高精度かつ少ない計算量で生成可能な画像データ処理装置を提供することである。 An object of the present invention is to provide an image data processing apparatus capable of generating the reliability of information of each pixel in enlarged image data with high accuracy and a small amount of calculation.
本発明の一態様に係る画像データ処理装置は、低解像度画像データと、当該低解像度画像データをアップサンプリングした画像データである高解像度画像データと、前記低解像
度画像データおよび前記高解像度画像データに対応する第3の画像データとを取得する画像データ取得手段と、前記高解像度画像データの画素値の信頼度を表す信頼度データを決定する信頼度データ決定手段と、前記高解像度画像データを補正する補正手段と、を備え、前記信頼度データ決定手段は、前記高解像度画像データの対象画素の画素位置に対応する前記低解像度画像データにおける画素位置の近傍画素の画素値に基づいて決定される第1の評価値と、前記第1の評価値とは異なる方法によって前記近傍画素の画素値に基づいて決定される第2の評価値と、の比較に基づいて、前記高解像度画像データの前記対象画素の画素値の信頼度を決定し、前記補正手段は、前記信頼度データおよび前記第3の画像データに基づいて、前記高解像度画像データを当該高解像度画像データの画素値を用いて補正する、ことを特徴とする。
Image data processing apparatus according to an embodiment of the present invention, a high-resolution image data which is a low-resolution image data, the image data obtained by up-sampling the low-resolution image data, the low-resolution
Reliability data determination for determining the reliability data representing the reliability of the pixel value of the high-resolution image data and the image data acquisition means for acquiring the degree image data and the third image data corresponding to the high-resolution image data. The reliability data determining means is provided with means and correction means for correcting the high-resolution image data, and the reliability data determining means is in the vicinity of the pixel position in the low-resolution image data corresponding to the pixel position of the target pixel of the high-resolution image data. For comparison between the first evaluation value determined based on the pixel value of the pixel and the second evaluation value determined based on the pixel value of the neighboring pixel by a method different from the first evaluation value. Based on this, the reliability of the pixel value of the target pixel of the high-resolution image data is determined, and the correction means obtains the high-resolution image data based on the reliability data and the third image data. It is characterized in that correction is performed using the pixel value of the resolution image data.
本発明の一態様に係る画像データ処理方法は、画像データ処理装置が行う画像データ処理方法であって、低解像度画像データと、当該低解像度画像データをアップサンプリングした画像データである高解像度画像データと、前記低解像度画像データおよび前記高解像度画像データに対応する第3の画像データとを取得する画像データ取得ステップと、前記高解像度画像データの画素値の信頼度を表す信頼度データを決定する信頼度データ決定ステップと、前記高解像度画像データを補正する補正ステップと、を含み、前記信頼度データ決定ステップでは、前記高解像度画像データの対象画素の画素位置に対応する前記低解像度画像データにおける画素の近傍画素から第1の評価値を決定し、前記高解像度画像データの対象画素の画素位置に対応する前記低解像度画像データにおける前記画素の前記近傍画素から、前記第1の評価値とは異なる方法により、第2の評価値を決定し、前記第1の評価値と前記第2の評価値の比較に基づいて、前記高解像度画像データの前記対象画素についての信頼度を決定し、前記補正ステップでは、前記信頼度データおよび前記第3の画像データに基づいて、前記高解像度画像データを当該高解像度画像データの画素値を用いて補正する、ことを特徴とする。
Image data processing method according to an embodiment of the present invention is an image data processing method by the image data processing apparatus performs the high resolution image data which is a low-resolution image data, the image data of the low-resolution image data up-sampling And the image data acquisition step of acquiring the low-resolution image data and the third image data corresponding to the high-resolution image data, and the reliability data representing the reliability of the pixel value of the high-resolution image data are determined. The reliability data determination step includes a reliability data determination step and a correction step for correcting the high-resolution image data. In the reliability data determination step, the low-resolution image data corresponding to the pixel position of the target pixel of the high-resolution image data. The first evaluation value is determined from the nearby pixels of the pixels, and the first evaluation value is obtained from the nearby pixels of the pixels in the low resolution image data corresponding to the pixel positions of the target pixels of the high resolution image data. the different methods to determine the second evaluation value, based on a comparison of the first evaluation value and the second evaluation value, to determine the reliability of the target pixel of the high resolution image data, the The correction step is characterized in that the high-resolution image data is corrected by using the pixel value of the high-resolution image data based on the reliability data and the third image data .
本発明によれば、拡大された画像データにおける各画素の情報の信頼度を高精度かつ少ない計算量で生成することが可能となる。 According to the present invention, it is possible to generate the reliability of the information of each pixel in the enlarged image data with high accuracy and a small amount of calculation.
本明細書において「画像データ」とは、数値データが論理的に2次元配列された2次元配列データを意味する。また、本明細書において「画像データ」は「マップ」とも称される。画像データの「画素」とは、画像データの2次元配列内での位置を意味する。画像データを構成する数値データは、特定の情報を表すデータに限定されず、例えば、輝度情報、距離情報、動き情報、信頼度情報を表すデータが含まれる。また、数値データの形式は、特定の形式に限られず、スカラー、ベクトル、行列などであってよい。取り扱う情報に応じて画像データは、輝度画像データ、距離画像データ、動き画像データ、信頼度画像データなどと称される。 In the present specification, the "image data" means two-dimensional array data in which numerical data is logically arranged two-dimensionally. Further, in the present specification, "image data" is also referred to as "map". The "pixel" of the image data means the position of the image data in the two-dimensional array. The numerical data constituting the image data is not limited to the data representing specific information, and includes, for example, data representing brightness information, distance information, motion information, and reliability information. The format of the numerical data is not limited to a specific format, and may be a scalar, a vector, a matrix, or the like. The image data is referred to as brightness image data, distance image data, motion image data, reliability image data, or the like, depending on the information to be handled.
本明細書における距離情報は、フォーカス位置から被写体までの相対的な距離、または撮影時の撮像装置から被写体までの絶対距離であってもよい。なお、絶対距離あるいは相対距離は、像面側での距離、物体側での距離のどちらであってもよい。また、距離は、実空間距離で表されてもよいし、デフォーカス量や視差量など実空間距離に換算できる量で表されていてもよい。 The distance information in the present specification may be a relative distance from the focus position to the subject, or an absolute distance from the image pickup apparatus at the time of shooting to the subject. The absolute distance or the relative distance may be either the distance on the image plane side or the distance on the object side. Further, the distance may be expressed as a real space distance, or may be expressed as an amount that can be converted into a real space distance, such as a defocus amount and a parallax amount.
本発明について、実施形態、図面を用いて詳細に説明するが、本発明は各実施形態の構成に限らない。また、各実施形態を適宜組み合わせてもよい。 The present invention will be described in detail with reference to embodiments and drawings, but the present invention is not limited to the configuration of each embodiment. Moreover, each embodiment may be combined appropriately.
(実施形態1)
<構成>
図1は、本発明の実施形態1に係る撮像装置1の構成を模式的に示している。撮像装置1は、撮像光学系10、撮像素子11、制御部12、画像データ処理装置13、記憶部14、入力部15、表示部16を有している。
(Embodiment 1)
<Composition>
FIG. 1 schematically shows the configuration of the
撮像光学系10は、複数のレンズから構成され、入射する光を撮像素子11の像面上に結像させる光学系である。撮像素子11は、CCDやCMOSなどのイメージセンサを有する撮像素子である。撮像素子11は、カラーフィルタを有する撮像素子でもよいし、モノクロの撮像素子でもよいし、三板式の撮像素子でもよい。
The image pickup
画像データ処理装置13は、信号処理部130、メモリ131、距離マップ生成部132、アップサンプリング部133、信頼度データ決定部134、距離マップ補正部135を有している。信号処理部130は、撮像素子11から出力されるアナログ信号のAD変換やノイズ除去、デモザイキング、輝度信号変換、収差補正、ホワイトバランス調整、色補正などの各種信号処理を行う機能部である。信号処理部130から出力されるデジタル画像データはメモリ131に蓄積され、表示部16への表示、記憶部14への記録(保存)、距離情報の算出、距離画像データの生成などに使用される。なお、距離画像データとは、距離情報の分布を表すものである。
The image
距離マップ生成部132は、信号処理部130から撮影画像データ(輝度画像データ)を取得し、その撮影画像データから被写体の距離情報、距離画像データを取得する。被写体の距離情報の取得方法は特に限定されない。距離情報を取得する方法の例として、撮影条件を変えて撮影したぼけ方の異なる撮影画像データを用いる方法(Depth From Defocus法:DFD法)や、視差の異なる撮影画像データを用いる方法(ステレオ法)が挙げられる。その他の例として、Time of Flight法やDepth From Focus方法(DFF法)が挙げられる。距離マップ生成部132で生成された距離画像データは、記憶部14に格納、またはメモリ131に一時的に格納され、後段の処理に利用される。また距離画像データはその取得方法に応じた補正処理が行われていてもよい。
The distance
本実施形態においては、距離マップ生成部132が生成する距離マップの解像度は、撮影画像データの解像度よりも低い(図3A、図3B)。すなわち、本実施形態における距離マップ生成部132は、撮影画像データの全ての画素について距離情報を求めるのではなく、所定間隔ごとの画素についてのみ距離情報を求める。
In the present embodiment, the resolution of the distance map generated by the distance
アップサンプリング部133は、距離マップ生成部132で生成された距離マップをアップサンプリングする機能を有する。アップサンプリングは、画像データを高解像度化する処理であり、アップスケーリング、アップコンバート、画像拡大処理とも称される。アップサンプリング部133は、アップサンプリングによって距離マップをどのようなサイズにしても構わない。ただし、アップサンプリング後のサイズが距離画像データの生成元の撮影画像データより大きいと、距離マップ補正時に補正効果が十分に得られない。アップサンプリング後のサイズが撮影画像データより小さいと、距離マップ補正時に撮影画像データをダウンサンプリングするなどの操作が必要となる。本実施形態では、アップサンプリング部133は、距離マップを、当該距離マップの生成元の撮影画像データと同じサイズに拡大するものとする。
The
本明細書では、アップサンプリング前の距離画像データを、低解像度距離画像データあるいは低解像度画像データとも称する。また、アップサンプリング後の距離画像データを、高解像度距離画像データ、高解像度画像データ、拡大距離画像データ、あるいは拡大画像データとも称する。 In the present specification, the distance image data before upsampling is also referred to as low resolution distance image data or low resolution image data. Further, the distance image data after upsampling is also referred to as high resolution distance image data, high resolution image data, enlarged distance image data, or enlarged image data.
アップサンプリング部133は、2つ以上の異なるアルゴリズムによってアップサンプリング処理を実行可能である。アップサンプリング(画像拡大)のアルゴリズムは、既存の任意のアルゴリズムであって良い。アップサンプリングのアルゴリズムの例として、ニアレストネイバー、バイニリア、バイキュービック、Lanczos−3などが挙げられる。なお、アルゴリズムとして、バイキュービックよりも高次の多項式近似を用いた補間や、Lanczos以外の非多項式近似を用いた補間を用いてもよい。
The
信頼度データ決定部134は、アップサンプリング部133で生成された距離マップの信頼度データ(信頼度マップ)を算出する機能を有する。信頼度データは、距離マップの各画素の信頼度からなるデータ(マップ)である。信頼度は、距離マップの各画素の距離情報の確からしさの指標となる情報である。信頼度は、多値であってもよいし、二値であってもよい。本実施形態では、信頼度は二値(信頼できるか信頼できないか)とする。
The reliability
距離マップをアップサンプリングすると、特に距離境界部の画素が信頼できない値を持つようになる。信頼度データ決定部134は、アップサンプリング後の距離マップの各画素についての信頼度を決定する。信頼度データ決定部134による、信頼度決定方法は後述する。
Upsampling a distance map causes pixels, especially at the distance boundaries, to have unreliable values. The reliability
距離マップ補正部135は、距離画像データの各画素の距離情報を補正する機能を有する。距離情報の補正は、取得された撮影画像データと、アップサンプリング部133で撮影画像データと同サイズにされた距離画像データと、信頼度データ決定部134で生成された信頼度データを用いて行われる。具体的な補正の方法は後述する。
The distance
記憶部14は、撮影画像データ、距離画像データ、信頼度データ、補正後距離画像データ、撮像装置1で利用されるパラメータデータなどが格納される不揮発性の記憶媒体である。記憶部14としては、高速に読み書きでき、且つ、大容量の記憶媒体であればどのようなものを利用してもよい。例えばフラッシュメモリなどが好ましい。
The
入力部15はユーザが操作し、撮像装置1に対して情報入力や設定変更を行うためのインターフェイスである。例えばダイヤル、ボタン、スイッチ、タッチパネルなどを入力部15として利用することができる。
The
表示部16は、液晶ディスプレイや有機ELディスプレイなどで構成される。表示部16は、撮影時の構図確認、撮影・記録した画像の閲覧、各種設定画面やメッセージ情報の表示などに利用される。
The
制御部12は、撮像装置1の各部を制御する機能である。制御部12の機能としては、例えば、オートフォーカス(AF)による自動焦点合わせ、フォーカス位置の変更、F値(絞り)の変更、画像の取り込み、シャッタやフラッシュ(いずれも不図示)の制御、記憶部14や入力部15や表示部16の制御などがある。
The
<方法>
図2は、本実施形態の画像処理の流れを示すフローチャートである。図3Aは処理対象の撮影画像データの例、図3Bは処理対象の距離画像データの例である。図4は、信頼度計算処理における、画素の一部におけるデータフローを示す図である。図5A〜5Cは、それぞれ、第1のアップサンプリング後の距離画像データ、第2のアップサンプリング後の距離画像データ、信頼度マップの例である。以下、これらの図面を参照しながら、本実施形態に係る画像データ処理装置13が行う画像処理を説明する。
<Method>
FIG. 2 is a flowchart showing the flow of image processing according to the present embodiment. FIG. 3A is an example of captured image data to be processed, and FIG. 3B is an example of distance image data to be processed. FIG. 4 is a diagram showing a data flow in a part of pixels in the reliability calculation process. 5A to 5C are examples of the distance image data after the first upsampling, the distance image data after the second upsampling, and the reliability map, respectively. Hereinafter, the image processing performed by the image
ステップS20において、アップサンプリング部133は、撮影画像データ301(図3A)と距離画像データ302(図3B)を取得する。具体的には、撮影画像データ301は信号処理部130から、距離画像データ302は距離マップ生成部132から取得できる。
In step S20, the
図3Aおよび図3Bにおいて、濃淡は画素値(輝度値または距離値)を表す。図3Bにおいては説明の簡略化のために、人物(前景)は全て同じ距離を持ち、背景は全て同じ距離を持つものとしている。ただし、距離画像データ302は実際には多値の距離情報を保持している。また、上述したように、距離マップ生成部132が生成する距離画像データ302は、元となる撮影画像データ301よりも解像度が低い。
In FIGS. 3A and 3B, shading represents a pixel value (luminance value or distance value). In FIG. 3B, for the sake of simplification of the explanation, it is assumed that all the people (foreground) have the same distance and all the backgrounds have the same distance. However, the
次にステップS21において、アップサンプリング部133が、距離画像データ302に対して第1のアップサンプリング処理を行う。本実施形態では、第1のアップサンプリング処理にニアレストネイバー補間を用いる。ニアレストネイバー補間では、アップサンプリング後に情報の無い画素に、情報を持った最近接画素の値を設定する。
Next, in step S21, the
図4における画像401は、距離画像データ302の一部の領域(4×4画素)を表している。第1のアップサンプリング処理において、ニアレストネイバー補間を用いて3×3倍のアップサンプリングを行うと、画像401は画像402のようになる。画像402中の太線で囲まれた画素411は、画像401の画素に対応する画素であり、対応画素と同じ画素値を有する。それ以外の画素には、画素411のうち最近接の画素と同じ画素値が設定される。
The
このように、画像402においては、画像401に対応しない画素が補間により生成・挿入される。特に距離境界部に着目した場合、前述したように最近接画素の値を選択しているため、アップサンプリング後の画像402における距離境界は、画素411の中間位置(等距離位置)となる。これは必ずしも正しくなく、画像402における距離境界の位置および距離境界付近の画素値は誤っている可能性が高い。
In this way, in the
図5Aは、距離画像データ302に第1のアップサンプリング処理(ニアレストネイバー補間)を施して得られる、アップサンプリング後の距離画像データ501を示す。
FIG. 5A shows the
次にステップS22において、アップサンプリング部133が、距離画像データ302に対して第2のアップサンプリング処理を行う。本実施形態では、第2のアップサンプリング処理にバイリニア補間を用いる。第2のアップサンプリング処理のアルゴリズムもどのような方法でも構わないが、第1のアップサンプリング処理のアルゴリズムとは異なる手法である必要がある。バイリニア補間では、アップサンプリング後に情報の無い画素に、情報を持った近傍画素の画素値の重み付き平均値が設定される。重み付き平均では、補間画素と近傍画素との距離が重みとして用いられる。
Next, in step S22, the
図4における画像403は、画像401にバイリニア補間を用いて3×3倍のアップサンプリングを行って得られる画像である。図4における濃淡は画素値(距離値)の大きさを表す。距離境界部に着目すると、直線的(線形的)に距離が変化する。アップサンプリング後の画像403には、距離値がぼかされて、明確な距離境界は存在しない。これは必ずしも正しくなく、画像403における上記領域の画素値は誤っている可能性が高い。
The
図5Bは、距離画像データ302に第2のアップサンプリング処理(バイリニア補間)を施して得られる、アップサンプリング後の距離画像データ502を示す。
FIG. 5B shows the
アップサンプリング手法は様々あるが、ステップS21およびS22で用いる手法はどのような手法でも構わない。採用するアップサンプリング手法において重要な点は、画素数を増やすことにより発生する情報の無い画素の補間方法である。補間方法には、一般的な手法としてニアレストネイバー補間、バイリニア補間、バイキュービック補間といった方法が挙げられる。 There are various upsampling methods, but any method may be used in steps S21 and S22. An important point in the upsampling method to be adopted is a pixel interpolation method without information generated by increasing the number of pixels. Examples of the interpolation method include near-rest neighbor interpolation, bilinear interpolation, and bicubic interpolation as general methods.
次にステップS23において、信頼度データ決定部134が、距離画像データの各画素について信頼度を求めて信頼度データを生成する。上述したように、本実施形態では、信頼度データは二値(信頼できるか信頼できないか)とする。信頼度データ決定部134は、第1および第2のアップサンプリング後の2つの距離画像データの同じ画素位置の距離値を比較し、差が閾値より大きければ距離値が信頼できないと判断し、閾値以下であれば距離値が信頼できると判断する。このような信頼度の決定方法が有効なのは、アップサンプリングの手法が異なると結果が異なる画素は、正しい距離値をアップサンプリングによって算出できていないと考えられるからである。なお、画素位置とは、画像における画素の座標を意味する。
Next, in step S23, the reliability
より具体的には、信頼度データ決定部134は、画素位置pの信頼度W(p)を次のようにして求める。

ここで、Du1は第1のアップサンプリング後の距離画像データ、Du2は第2のアップサンプリング後の距離画像データを表す。Du1(p)およびDu2(p)は、それぞれ画素位置pにおける画素値を表す。Eは、第1および第2のアップサンプリング後の2つの距離画像データの同じ画素位置の距離値の差を表す。Uは、信頼度の判定閾値である。 Here, Du1 represents the distance image data after the first upsampling, and Du2 represents the distance image data after the second upsampling. Du1 (p) and Du2 (p) each represent a pixel value at the pixel position p. E represents the difference between the distance values of the same pixel positions of the two distance image data after the first and second upsampling. U is a reliability determination threshold.
この場合、W=1は信頼できることを表し、W=0は信頼できないことを表す。判定閾値Uは距離画像データの距離分解能(データ分解能)等から決定することができる。例えば、距離値のばらつき精度がガウス分布として近似できる場合には3σ(標準偏差の3倍)、を判定閾値Uとすることができる。また許容する距離境界部のエラー量に基づいても判定閾値Uを決定することができる。例えば、距離境界部の許容エラー量を計測最大距離差の1%以内にしたい場合には閾値Uを計測最大距離差の1%の値に設定すればよい。 In this case, W = 1 indicates that it is reliable, and W = 0 indicates that it is unreliable. The determination threshold value U can be determined from the distance resolution (data resolution) of the distance image data and the like. For example, when the variation accuracy of the distance value can be approximated as a Gaussian distribution, 3σ (three times the standard deviation) can be set as the determination threshold value U. The determination threshold value U can also be determined based on the amount of error at the allowable distance boundary. For example, when it is desired to set the allowable error amount at the distance boundary portion within 1% of the maximum measurement distance difference, the threshold value U may be set to a value of 1% of the maximum measurement distance difference.
図5Cは、図5Aおよび図5Bのアップサンプリング後の距離画像データに基づいて求められる信頼度マップを示す。なお、図5Cでは、黒で描いた部分が信頼できない画素であり、白で描いた部分が信頼できる画素である。図4の画像404は、信頼度マップの一部分(画像401、402、403に対応する部分)を拡大した図である。図4の画像405は対応する撮影画像データを表す。距離画像データ405の輝度境界が正しい距離境界を表しているとすると、信頼度マップ404は距離境界付近を距離値が信頼できない領域であると正しく判別できている(信頼度マップ404中の点線412は実際の正しい距離境界を表す)。
FIG. 5C shows a reliability map obtained based on the distance image data after upsampling of FIGS. 5A and 5B. In FIG. 5C, the portion drawn in black is an unreliable pixel, and the portion drawn in white is a reliable pixel.
本実施形態では信頼度を二値で表しているが、信頼度は多値であってもよい。信頼度を多値とする場合には、差分量Eが大きいほど信頼度が低くなるように信頼度を決定するとよい。 In the present embodiment, the reliability is represented by a binary value, but the reliability may be a multi-value. When the reliability is set to multiple values, the reliability may be determined so that the larger the difference amount E, the lower the reliability.
ステップS24において、距離マップ補正部135が、ステップS23で算出された信頼度マップに少なくとも部分的に基づいて、アップサンプリング後の距離画像データを補正する。補正対象は、第1および第2のアップサンプリングのいずれが施された距離画像データであってもよいが、これらのうちより高精度な手法を用いてアップサンプリングされた距離画像データを補正対象とするとよい。本実施形態では、バイリニア補間を用いてアップサンプリングされた距離画像データ502に対して、補正処理が施される。
In step S24, the distance
補正処理は例えば一例として、以下のようなフィルタ処理が挙げられる。
式(3)において、Dは補正前の距離情報、D’は補正後の距離情報である。Iは撮影画像データ内の画素の輝度値または色情報である。pは距離画像データ内の補正対象画素の位置、qは補正対象画素pの周辺画素の位置である。Gはガウス関数(σは分散値)で、Gσs、Gσrは異なるガウス関数でもよいし、同じガウス関数でもよい。Qは計算範囲であり、アップサンプリングの割合に合わせて適宜設定される。 In the formula (3), D is the distance information before the correction, and D'is the distance information after the correction. I is the luminance value or color information of the pixels in the captured image data. p is the position of the correction target pixel in the distance image data, and q is the position of the peripheral pixels of the correction target pixel p. G is a Gaussian function (σ is a variance value), and G σs and G σr may be different Gaussian functions or the same Gaussian function. Q is a calculation range and is appropriately set according to the upsampling rate.
このフィルタ処理により、信頼できない距離情報を使わず信頼できる距離情報のみを用いて距離データが補正できる。また、撮影画像データにおける輝度情報または色情報が類似するほど重みが大きく設定されるので、撮影画像データにおける輝度境界または色境界に合わせて、距離データを精度良く補正することができる。またW(p)が1の場合、つまり信頼できる画素が補正対象画素である場合には、補正を行わなくてもよいので、W(p)が0となる画素pのみを補正することで計算量を削減することができる。 By this filtering process, the distance data can be corrected by using only the reliable distance information without using the unreliable distance information. Further, since the weight is set to be larger as the luminance information or color information in the captured image data is similar, the distance data can be accurately corrected according to the luminance boundary or the color boundary in the captured image data. Further, when W (p) is 1, that is, when the reliable pixel is the pixel to be corrected, the correction does not need to be performed. Therefore, the calculation is performed by correcting only the pixel p in which W (p) is 0. The amount can be reduced.
上記の式(3)によるフィルタ処理(補正処理)は、信頼度が多値である場合にも同様
に適用可能である。
The filter processing (correction processing) according to the above equation (3) can be similarly applied even when the reliability is multi-valued.
<本実施形態の有利な効果>
本実施形態によれば、異なるアップサンプリング手法を用いてアップサンプリングを行い、アップサンプリング後の画素値の差分を解析することで距離境界(画素値の信頼度が低い領域)を精度良く抽出できる。
<Advantageous effect of this embodiment>
According to this embodiment, upsampling is performed using different upsampling methods, and the distance boundary (region with low reliability of pixel values) can be extracted with high accuracy by analyzing the difference in pixel values after upsampling.
既存のエッジ抽出手法ではエッジ画素を抽出するが、図4に示す信頼度マップ404のようにエラーを含んでいる可能性のある画素をすべて抽出することはできない。またDifference of Gaussianのように分散値が異なるガウシアンフィルタの適用結果の差分を用いる場合は距離境界付近を抽出することができるが、正確な抽出のためには各分散値を適切に設定する必要がある。適切な分散値の設定は困難であり、不適切な分散値を用いると信頼度マップ404のような正しい距離境界は抽出されず、正解よりも広いまたは狭い範囲が距離境界付近として選択されてしまう。また、距離境界の抽出にフィルタ処理が必要とするため、計算量も多い。
Although the existing edge extraction method extracts edge pixels, it is not possible to extract all the pixels that may contain an error as in the
本実施形態によれば、アップサンプリングに対する距離境界部のエラーを補正する上で必要な信頼度を正しく決定することができるため、より高精度な距離画像データに補正することが可能となる。また、エッジ抽出処理やフィルタ処理が不要なため計算量を少なくすることができる。 According to the present embodiment, since the reliability required for correcting the error at the distance boundary portion due to upsampling can be correctly determined, it is possible to correct the distance image data with higher accuracy. Moreover, since edge extraction processing and filter processing are not required, the amount of calculation can be reduced.
(実施形態2)
実施形態1では異なるアップサンプリング手法を用いて信頼度を決定し、距離情報の補正を行っていた。それに対して、本実施形態ではアップサンプリング前の距離マップの近傍画素の関係を解析することで、信頼度データの生成を行う。画像データ処理装置の構成は実施形態1のデータ処理装置(図1)と同じで、アップサンプリング部133と信頼度データ決定部134の処理内容が異なる。その処理内容を、図6のフローチャートを用いて説明する。本実施形態の画像処理方法を、実施形態1と異なる点を中心に説明する。
(Embodiment 2)
In the first embodiment, the reliability is determined by using a different upsampling method, and the distance information is corrected. On the other hand, in the present embodiment, reliability data is generated by analyzing the relationship between neighboring pixels of the distance map before upsampling. The configuration of the image data processing device is the same as that of the data processing device (FIG. 1) of the first embodiment, and the processing contents of the
ステップS60において、アップサンプリング部133は、撮影画像データ301(図3A)、距離画像データ302(図3B)を取得する。この処理は実施形態1(図3のステップS20)と同様である。
In step S60, the
ステップS61では、アップサンプリング部133が、距離画像データ302に対してアップサンプリング処理を行う。実施形態1ではアップサンプリングと共に行う補間が重要であった。本実施形態では、信頼度データを求めるという観点からは、補間処理は必須ではない。本実施形態のアップサンプリング処理S61では、画像データのサイズ(全画素数)を増加するが、そのうち値を有する画素の数はアップサンプリング前の画像データの画素数と同じであり、その他の画素は値を持たない。なお、「画素が値を持たない」というのは、当該画素が「値無し」を意味する値を持つことも含む。もっとも、ステップS61において、アップサンプリング部133が補間(例えば、バイリニア補間)を伴うアップサンプリング処理を実行して、拡大距離画像データを生成してもよい。
In step S61, the
図7を参照してよりステップS61の処理を具体的に説明する。図7において、画像701は距離画像データ302の一部の領域(4×4画素)を表し、画像702はアップサンプリング処理後の距離画像データのうち画像701に対応する領域を表す。なお、ここではアップサンプリング処理により、3×3倍に拡大されたものとする。画像702において、画像701の画素と対応する16個の画素のみが値を持ち、その他の画素は値を持たない。値を持たない画素は画像702においてグレーで示されている。
The process of step S61 will be described in more detail with reference to FIG. 7. In FIG. 7, the
次にステップS62において、信頼度データ決定部134が、距離画像データの各画素について信頼度を求めて信頼度データを生成する。本実施形態では、アップサンプリング後の距離画像データの計算対象画素pに対して、その近傍の値を持つ画素を用いて、2通りの方法で評価値を求めて、この評価値を比較することにより画素pに対する信頼度を求める。
Next, in step S62, the reliability
画素pについての評価値H(p)は、以下のように、画素p近傍の値のある画素のみを使用して、画素間距離に応じた重み係数を用いた重み付け平均値とする。具体的には、評価値H(p)は以下のように定義できる。
式(4)において、Q’は画素pの近傍の画素であって値の持つ画素の集合を表す。集合Q’は適宜設定すればよく、画素pからの距離が所定値以内の画素とすることができる。例えば、画素pの左上、右上、左下、右下にある値を持つ画素からなる集合、または画素pが縦方向または横方向に隣接する2画素の間にある場合はこれら2画素からなる集合とすることができるが、より多数の画素を含むように設定してもよい。Fは画素間距離(|p−q|)に応じた重みを計算する関数を表す。Fは例えば、ガウス関数や、Q’の集合の中で最も距離の近い画素のみを1とするような関数が挙げられる。このような関数Fによって求められるF(|p−q|)は、画素qについての重み係数を計算していると捉えられる。 In the equation (4), Q'represents a set of pixels in the vicinity of the pixel p and having a value. The set Q'may be set as appropriate, and the distance from the pixel p can be a pixel within a predetermined value. For example, a set consisting of pixels having values at the upper left, upper right, lower left, and lower right of the pixel p, or a set consisting of these two pixels when the pixel p is between two adjacent pixels in the vertical or horizontal direction. However, it may be set to include a larger number of pixels. F represents a function for calculating the weight according to the inter-pixel distance (| p−q |). Examples of F include a Gaussian function and a function in which only the closest pixel in the set of Q'is set to 1. F (| p−q |) obtained by such a function F can be regarded as calculating the weighting coefficient for the pixel q.
信頼度データ決定部134は、各画素について、異なる2つの関数F(F1とF2とする)により求められる重み係数を用いて2つの評価値H(H1とH2とする)を決定する。信頼度データ決定部134は、2つの評価値H1およびH2の差分|H1−H2|が判定閾値より大きければ画素pの距離値が信頼できないと判断し、差分|H1−H2|が判定閾値以下であれば画素pの距離値が信頼できると判断する。
The reliability
例えば、一方の関数F1が分散σを有するガウス関数であり、他方の関数F2が画素集合Q’の中で最近接画素のみを1とする関数であるとする。また、集合Q’は、周囲の4つの値を持つ画素からなる集合とする。また簡単のため、図7の画像701,702に示すように、白で示す画素の画素値(距離値)を1,黒で示す画素の画素値(距離値)を0とする。
For example, suppose that one function F1 is a Gaussian function having a variance σ, and the other function F2 is a function in which only the closest pixel is 1 in the pixel set Q'. Further, the set Q'is a set composed of pixels having four surrounding values. For simplicity, as shown in the
図7の画像702内の画素p1に対応する集合Q’に含まれる近傍4点の画素値は全て1である。つまり、画素pに対する評価値は、ガウス関数F1に基づく重みを用いた評価値H1も、最近接画素のみを選択する関数F2に基づく重みを用いた評価値H2も、いずれも1となる(H1=H2=1)。したがって、評価値H1とH2の差は0なので、画素p1の画素値(距離値)は信頼できると判断される。
The pixel values of the four neighboring points included in the set Q'corresponding to the pixel p1 in the
一方、画素p2においては、対応する集合Q’に含まれる近傍4点は、2画素が画素値「1」を持ち、2画素が画素値「0」を有する。したがって、ガウス関数F1に基づく重みを用いた評価値H1は、0と1の中間値を取る。一方、画素pの最近接画素の画素値は0なので、最近接画素のみを選択する関数F2に基づく重みを用いた評価値H2は0となる。評価値H1とH2の差|H1−H2|が閾値より大きければ、画素p2の画素値(距離値)は信頼できないと判断される。 On the other hand, in the pixel p2, two nearby pixels included in the corresponding set Q'have a pixel value of "1" and two pixels have a pixel value of "0". Therefore, the evaluation value H1 using the weight based on the Gaussian function F1 takes an intermediate value between 0 and 1. On the other hand, since the pixel value of the closest pixel of pixel p is 0, the evaluation value H2 using the weight based on the function F2 that selects only the closest pixel is 0. If the difference between the evaluation values H1 and H2 | H1-H2 | is larger than the threshold value, it is determined that the pixel value (distance value) of the pixel p2 is unreliable.
上述の判定閾値は0とすることができる。この場合、集合Q’に含まれる近傍画素が有する値が異なる(全てが同一ではない)場合に、アップサンプリング後の距離画像データの画素は信頼できないと判断される。 The above-mentioned determination threshold value can be set to 0. In this case, if the values of the neighboring pixels included in the set Q'are different (not all are the same), it is determined that the pixels of the distance image data after upsampling are unreliable.
ただし、判定閾値は0よりは大きな、ある程度の大きさを有する値とすることが好ましい。判定閾値が小さすぎると、緩やかな距離変化を持つ領域が、距離境界すなわち信頼できない領域として判断されてしまうためである。したがって、許容する距離変化に合わせて閾値を設定することが望ましい。 However, the determination threshold value is preferably a value having a certain magnitude larger than 0. This is because if the determination threshold value is too small, the region having a gradual change in distance is determined as a distance boundary, that is, an unreliable region. Therefore, it is desirable to set the threshold value according to the allowable distance change.
図7における画像703は、補間を伴うアップサンプリング後の距離マップのうち画像701,702に対応する部分を示す。図7における画像704は、画像702(703)の全ての画素に対して上記のようにして信頼度を求めて得られる信頼度マップの例である。図から分かるように、距離値が信頼できない領域として、距離境界付近が適切に抽出されている。
ステップS63では、距離マップ補正部135が、ステップS62で求められた信頼度マップを用いて、拡大された距離画像データを補正する。距離マップ補正処理S63は、実施形態1(図2のステップS24)と同様であるため、繰り返しの説明は省略する。
In step S63, the distance
関数Fは、上述したようなガウス関数や最近接画素を選択する関数でなくてもよく、距離に反比例するような定められた重みを出力する関数であってもよい。また集合Q’も近傍4画素である必要はなく、近傍9画素や16画素など適宜設定することができる。 The function F does not have to be the Gaussian function described above or the function for selecting the closest pixel, but may be a function that outputs a predetermined weight that is inversely proportional to the distance. Further, the set Q'does not have to be 4 pixels in the vicinity, and 9 pixels or 16 pixels in the vicinity can be appropriately set.
また、本実施形態においては信頼度が二値であるものとして説明したが、実施形態1と同様に信頼度を多値としてもよい。この場合、2つの評価値の差(|H1−H2|)が大きいほど信頼度が低くなるように信頼度を決定するとよい。 Further, in the present embodiment, the reliability is assumed to be binary, but the reliability may be multi-valued as in the first embodiment. In this case, the reliability may be determined so that the larger the difference between the two evaluation values (| H1-H2 |), the lower the reliability.
また、実施形態1のように補間を用いてアップサンプリング後の画像データの画素値を求める場合、補間によって求められる値は本実施形態における評価値Hに相当すると捉えることができる。補間により求められる画素値は、補間手法がニアレストネイバー、バイリニア、バイキュービックなどどのような手法であっても、アップサンプリング前の近傍画素(値を持つ画素に相当)の重み付け平均値であるとみなせるためである。 Further, when the pixel value of the image data after upsampling is obtained by using interpolation as in the first embodiment, the value obtained by the interpolation can be regarded as corresponding to the evaluation value H in the present embodiment. The pixel value obtained by interpolation is the weighted average value of neighboring pixels (corresponding to pixels with values) before upsampling regardless of the interpolation method such as nearest neighbor, bilinear, or bicubic. This is because it can be regarded.
(実施形態3)
実施形態2は、信頼度算出対象画素の近傍に対応するアップサンプリング前の距離画像データの画素値(集合Q’)に基づいて、信頼度を求めている。本実施形態においても、同様に集合Q’に基づいて信頼度を求めるが、より単純に集合Q’内の画素値の同一性に基づいて、信頼度を求める。
(Embodiment 3)
In the second embodiment, the reliability is obtained based on the pixel value (set Q') of the distance image data before upsampling corresponding to the vicinity of the pixel for which the reliability is calculated. Similarly, in the present embodiment, the reliability is obtained based on the set Q', but the reliability is obtained more simply based on the identity of the pixel values in the set Q'.
画像データ処理装置の構成は実施形態2のデータ処理装置と同じであり、信頼度データ決定部134の処理内容が異なる。その処理内容を、図8Aのフローチャートを用いて説明する。本実施形態の画像処理方法を、実施形態2と異なる点を中心に説明する。
The configuration of the image data processing device is the same as that of the data processing device of the second embodiment, and the processing content of the reliability
ステップS80において、アップサンプリング部133は、撮影画像データ301(図3A)、距離画像データ302(図3B)を取得する。この処理は実施形態2(図6のステップS60)と同様である。
In step S80, the
ステップS81では、アップサンプリング部133が、距離画像データ302に対してアップサンプリング処理を行う。本実施形態では、信頼度データを求めるという観点から
は、アップサンプリング処理S81は不要である。画像データ処理装置は、例えば、ステップS80で取得した距離画像データをアップサンプリング(拡大)した距離画像データを、外部の装置から取得するようにしてもよい。
In step S81, the
ステップS82では、信頼度データ決定部134が、信頼度マップを用意する。信頼度マップは、アップサンプリング後の距離画像データと同じサイズを有する。本実施形態では信頼度は二値とし、ステップS82で用意される信頼度マップの各画素の信頼度の初期値は0(信頼できないことを表す)とする。
In step S82, the reliability
ステップS83では、信頼度データ決定部134が、アップサンプリング前の距離画像データの局所領域(例えば、4画素)ごとに、画素値の最大差分(局所領域内の画素値の最大値と最小値の差分)を求め、この最大差分に基づいて信頼度を決定する。より具体的には、信頼度データ決定部134は、局所領域内の画素値の最大差分が閾値以下であれば、当該局所領域に対応する信頼度マップ中の領域の信頼度を1(信頼できることを表す)に更新する。局所領域内の画素値の最大差分が閾値よりも大きければ、信頼度マップは更新されない。信頼度データ決定部134は、アップサンプリング前の距離画像データ内で局所領域をシフトさせつつ、上記の処理を距離画像データ全体に対して行う。信頼度データ決定部134は、局所領域をシフトさせる際には、重複を許可し、1画素単位でシフトさせるとよい。
In step S83, the reliability
図9A〜9Dを参照して、より具体的に説明する。図9A〜9Dにおいて、画像901は、アップサンプリング前の距離画像データ(距離マップ)の一部の領域(4×4画素)を表す。画像902〜905は、画像901に対応する部分の信頼度マップを表す。図中の信頼度マップにおいて、グレーの画素は信頼度0(信頼できない)、白色の画素は信頼度1(信頼できる)であることを表す。また、図中の距離マップにおいては、説明の簡略化のため、白色の画素の画素値(距離値)を1,黒色の画素の画素値(距離値)を0とする。
A more specific description will be given with reference to FIGS. 9A to 9D. In FIGS. 9A-9D, the
また、以下の説明では、簡単のため、判定閾値は0に近い十分小さい値とする。しかしながら実際には、被写体距離が徐々に変化している場合も考慮して、判定閾値はある程度の大きさを有する値とすることが好ましい。判定閾値を小さすぎる値に設定すると、緩やかな距離変化を持つ領域が、距離境界すなわち信頼できない領域として判断されてしまう。したがって、許容する距離変化に合わせて閾値を設定することが望ましい。 Further, in the following description, for the sake of simplicity, the determination threshold value is set to a sufficiently small value close to 0. However, in reality, it is preferable that the determination threshold value has a certain magnitude in consideration of the case where the subject distance is gradually changing. If the determination threshold is set to a value that is too small, a region having a gradual change in distance will be determined as a distance boundary, that is, an unreliable region. Therefore, it is desirable to set the threshold value according to the allowable distance change.
図9Aの距離マップ901中の局所領域p3内の4画素の画素値は全て1である。したがって、局所領域p3内での画素値の最大差分は0、すなわち判定閾値以下である。そこで、距離マップ902内の領域p4(局所領域p3に対応する領域)の信頼度が1に更新される。なお、領域p4は、局所領域p3(2×2画素)に含まれる4画素に対応するアップサンプリング後の4画素を頂点とする正方形領域(4×4画素)である。
The pixel values of the four pixels in the local region p3 in the
図9Bの距離マップ901中の局所領域p5内の4画素のうち、3画素が1であり1画素が0であり、したがって、局所領域p5内での画素値の最大差分は1、すなわち判定閾値より大きい。そこで、距離マップ903内の領域p6(局所領域p5に対応する領域)の信頼度は更新されない。
Of the 4 pixels in the local region p5 in the
図9Cの距離マップ901中の局所領域p7内の4画素の画素値は全て0である。したがって、局所領域p7内での画素値の最大差分は0、すなわち判定閾値以下である。そこで、距離マップ904内の領域p8(局所領域p7に対応する領域)の信頼度が1に更新される。
The pixel values of the four pixels in the local region p7 in the
図9Dは、上記の処理を距離マップ全体に対して行って最終的に得られる信頼度マップ905を示す。距離マップにおける距離境界が信頼できない領域として適切に抽出できていることが分かる。なお、図9A〜9Dに示す距離マップおよび信頼度マップは各々一部の領域を示したものであり、信頼度マップ905の周辺部の信頼度は、距離マップ901と図示しない距離マップにまたがる局所領域から決定される。
FIG. 9D shows the
ステップS84では、距離マップ補正部135が、ステップS83で求められた信頼度マップを用いて、拡大された距離画像データを補正する。距離マップ補正処理S84は、実施形態1(図2のステップS24)と同様であるため、繰り返しの説明は省略する。
In step S84, the distance
上記の説明では、距離マップの初期値を信頼度0とし、局所領域内の画素値の最大値が閾値以下の場合(すなわち、信頼できる場合)に、距離マップ内の対応する領域の信頼度を1に更新している。しかしながら、距離マップの初期値を信頼度1とし、局所領域内の画素値の最大値が閾値より大きい場合(すなわち、信頼できない場合)に、距離マップ内の対応する領域の信頼度を0に更新してもよい。
In the above description, the initial value of the distance map is set to 0, and when the maximum value of the pixel value in the local area is equal to or less than the threshold value (that is, reliable), the reliability of the corresponding area in the distance map is set. It has been updated to 1. However, when the initial value of the distance map is set to the
また、上記の説明では、局所領域が4画素からなる正方形としたが、局所領域の形状はこれに限られない。例えば、局所領域をより大きな正方形とすることもできる。また、局所領域は、正方形ではなくて長方形としてもよい。例えば、隣接する2画素からなる領域を局所領域としてもよい。この場合は、横方向に並ぶ2画素からなる局所領域と、縦方向に並ぶ2画素からなる局所領域を、それぞれシフトさせて信頼度マップを生成するとよい。また、信頼度を更新する領域(局所領域に対応する領域)は、上述のように局所領域をアップサンプリングして得られる領域の一部とする必要はなく、その他の形状としてもよい。 Further, in the above description, the local region is a square composed of 4 pixels, but the shape of the local region is not limited to this. For example, the local area can be a larger square. Further, the local region may be a rectangle instead of a square. For example, a region composed of two adjacent pixels may be used as a local region. In this case, it is preferable to shift the local region consisting of two pixels arranged in the horizontal direction and the local region composed of two pixels arranged in the vertical direction to generate the reliability map. Further, the region for updating the reliability (region corresponding to the local region) does not have to be a part of the region obtained by upsampling the local region as described above, and may have other shapes.
以下、図8Bおよび図10A〜10Fを参照して、局所領域が隣接する2画素からなる場合の動作例を説明する。図8Bは、本実施形態の変形例に係る画像処理方法のフローチャートである。図8Aのフローチャートとの違いは、ステップS85において初期値が1の信頼マップを用意し、ステップS86において最大差分が閾値よりも大きい場合に信頼度を0に更新する点である。 Hereinafter, an operation example in the case where the local region is composed of two adjacent pixels will be described with reference to FIGS. 8B and 10A to 10F. FIG. 8B is a flowchart of an image processing method according to a modified example of the present embodiment. The difference from the flowchart of FIG. 8A is that a reliability map having an initial value of 1 is prepared in step S85, and the reliability is updated to 0 when the maximum difference is larger than the threshold value in step S86.
図10A〜10Fにおいて、画像1001は、アップサンプリング前の距離画像データ(距離マップ)の一部の領域(4×4画素)を表す。画像1002〜1007は、画像1001に対応する部分の信頼度マップを表す。図中の信頼度マップにおいて、グレーの画素は信頼度0(信頼できない)、白色の画素は信頼度1(信頼できる)であることを表す。また、図中の距離マップにおいては、説明の簡略化のため、白色の画素の画素値(距離値)を1,黒色の画素の画素値(距離値)を0とする。また、簡単のため判定閾値は0に近い十分小さい値とする。
In FIGS. 10A to 10F, the
ここでは、まず横方向に並んだ2画素からなる局所領域を用いて判定を行い(図10A〜10C)、次に縦方向に並んだ2画素からなる局所領域を用いて判定を行っている(図10D〜10F)。ただし、この順序はどちらが先でもよく、また、横方向と縦方向の局所画素を交互に用いて判定を行ってもよい。 Here, the determination is first made using the local region consisting of two pixels arranged in the horizontal direction (FIGS. 10A to 10C), and then the determination is made using the local region consisting of two pixels arranged in the vertical direction (FIGS. 10A to 10C). 10D-10F). However, this order may be either first, and the determination may be made by alternately using the local pixels in the horizontal direction and the local pixels in the vertical direction.
図10Aにおいて、局所領域p9内の画素値はいずれも1であるので、信頼度マップ1002の更新は行われない。図10Bにおいて、局所領域p10内の画素値は異なるので、信頼度マップ1003を更新して、局所領域p10に対応する領域p11内の信頼度を0(信頼できない)とする。ここで領域p11は、局所領域p10の2つ画素に対応する2つの画素p10’に挟まれ、局所領域p10の2つの画素の上下の4つの隣接画素に対応する4画素を頂点とする長方形領域の内部に含まれる(周辺部分を除いた)領域(2×
5画素)とする。これは、横方向に並んだ局所領域を採用する場合、縦方向のエッジの有無を判定していることになるためである。図10Cに示す信頼度マップ1004は、上記の操作を距離画像データ全体に対して得られる信頼度マップを示す。
In FIG. 10A, since the pixel values in the local region p9 are all 1, the
5 pixels). This is because when the local regions arranged in the horizontal direction are adopted, the presence or absence of edges in the vertical direction is determined. The
次に、縦方向に並んだ局所領域を用いて同様の操作を行う。図10Dにおいて、局所領域p12内の画素値はいずれも1であるので、信頼度マップ1005の更新は行われない。図10Eにおいて、局所領域p13内の画素値は異なるので、信頼度マップ1006を更新して、局所領域p13に対応する領域p14内の信頼度を0(信頼できない)とする。個々で、局所領域p13に対応する領域p14は、局所領域p10に対応する領域p11と同様に定義される。図10Fに示す信頼度マップ1007は、上記の操作を距離画像データ全体に対して得られる最終的な信頼度マップである。
Next, the same operation is performed using the local regions arranged in the vertical direction. In FIG. 10D, since the pixel values in the local region p12 are all 1, the
本実施形態によれば、距離画像データにおける近傍画素の最大差分を求めるだけでアップサンプリング後の距離境界を抽出できる。すなわち、より少ない計算量で信頼度を決定することができる。 According to this embodiment, the distance boundary after upsampling can be extracted only by obtaining the maximum difference between neighboring pixels in the distance image data. That is, the reliability can be determined with a smaller amount of calculation.
本実施形態は、実施形態2における2つの評価値をそれぞれ次のように決定した実施形態と捉えることができる。すなわち、本実施形態では、信頼度算出対象画素に対応するアップサンプリング前の距離画像データの局所領域(近傍画素)内の画素値の最大差分を一方の評価値とし、信頼度算出対象画素にかかわらずに0を他方の評価値としていると捉えることができる。 This embodiment can be regarded as an embodiment in which the two evaluation values in the second embodiment are determined as follows. That is, in the present embodiment, the maximum difference between the pixel values in the local region (neighboring pixels) of the distance image data before upsampling corresponding to the reliability calculation target pixel is set as one evaluation value, regardless of the reliability calculation target pixel. It can be considered that 0 is set as the evaluation value of the other.
ただし、本実施形態では、アップサンプリング後の距離画像データの1つの画素(信頼度算出対象画素)に対して、対応するアップサンプリング前の距離画像データの局所領域(近傍領域)が複数存在することがある。したがって、本実施形態では、1つの信頼度算出対象画素について、複数の近傍領域(局所領域)の評価値差分に基づいて信頼度が決定される場合がある。なお、初期値として信頼度が0の信頼度マップを用意する場合(図8A)は、複数の近傍領域の評価値差分のうち、いずれか1つでも閾値以下のものがあれば、信頼度算出対象画素の信頼度が1として決定される。一方、初期値として信頼度が1の信頼度マップを用意する場合(図8B)は、複数の近傍領域の評価値差分のうち、いずれか1つでも閾値より大きいものがあれば、信頼度算出対象画素の信頼度が0として決定される。 However, in the present embodiment, for one pixel (reliability calculation target pixel) of the distance image data after upsampling, there are a plurality of corresponding local regions (near regions) of the distance image data before upsampling. There is. Therefore, in the present embodiment, the reliability of one reliability calculation target pixel may be determined based on the evaluation value difference of a plurality of neighboring regions (local regions). When a reliability map with a reliability of 0 is prepared as an initial value (FIG. 8A), the reliability is calculated if any one of the evaluation value differences in the plurality of neighboring regions is equal to or less than the threshold value. The reliability of the target pixel is determined as 1. On the other hand, when a reliability map having a reliability of 1 is prepared as an initial value (FIG. 8B), if any one of the evaluation value differences of the plurality of neighboring regions is larger than the threshold value, the reliability is calculated. The reliability of the target pixel is determined as 0.
(実施形態4)
実施形態1〜3では、撮影画像データと距離画像データを使用し、信頼度データの生成および距離情報の補正を行っている。それに対して、本実施形態では、撮影画像データと距離画像データ以外を用いて、信頼度データの生成及び補正処理が行えることを示す。図11は、本実施形態に係る画像データ処理装置111の機能ブロック図を表す。本実施形態に係る画像データ処理装置111が行う画像処理方法のフローチャートは、実施形態1〜3のフローチャートと同じである。本実施形態の画像処理方法を、実施形態1〜3と異なる点を中心に説明する。
(Embodiment 4)
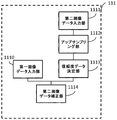
In the first to third embodiments, the captured image data and the distance image data are used to generate reliability data and correct the distance information. On the other hand, in the present embodiment, it is shown that the reliability data can be generated and the correction process can be performed by using other than the captured image data and the distance image data. FIG. 11 shows a functional block diagram of the image
画像データ処理装置111は、第1画像データ入力部1110、第2画像データ入力部1111、アップサンプリング部1112、信頼度データ決定部1113、第2画像データ補正部1114を有している。第1画像データ入力部1110には、基準となるべき画像データ(以下、第1画像データと称する)が入力される。第1画像データは、任意の画像データであってよい。第1画像データは、輝度画像データ以外に、例えば既にアップサンプリングおよび補正された距離画像データであってもよい。第1画像データのその他の例は、赤外光や偏光等の情報を持つ画像データである。輝度画像等を入力する場合には、図1のように撮像装置とすることもでき、距離画像データ等の場合にはデータ入力部には
データ生成部を含んでもよい。
The image
第2画像データ入力部1111には、第1画像データに対応し、第1画像データよりも低解像度な画像データ(以下、第2画像データと称する)が入力される。第2画像データは、上記の条件を満たせばどのような画像データであってもよく、例えば、距離画像データ、赤外光や偏光等の情報を持つ画像データ、動き画像(Optical Flow)、セグメンテーション画像が挙げられる。動き画像は被写体(時にはカメラの動きも含む)の動きを表すデータである。動き画像は、例えば、横方向(x方向)と縦方向(y方向)の速度を各画素で保持するデータ形式を有する。動き画像は、一般的に、ある時間間隔で輝度画像を二枚撮影し、その二枚の画像のテンプレートマッチングによって尤もらしい位置を計算することにより生成できる。
セグメンテーション画像は被写体のオブジェクト毎に分割されたデータである。例えば、被写体中の人と車とビルといったようなものが画素単位で分割され、それぞれにインデックスが付与されているような画像である。また、人や車といったオブジェクトの単位ではなく、似た色等の属性に従って分割されたデータもセグメンテーション画像である。また前景と背景、またはその中間層といったように距離値は用いないが、距離に応じて分割したデータもセグメンテーション画像と呼ぶ。
第2画像データは、画像データ処理装置111以外の装置から入力されてもよいし、画像データ処理装置111によって第1画像データを含むその他情報から算出されてもよい。
Image data (hereinafter, referred to as second image data) corresponding to the first image data and having a resolution lower than that of the first image data is input to the second image
The segmentation image is data divided for each object of the subject. For example, it is an image in which a person, a car, a building, etc. in the subject are divided in pixel units and an index is given to each. In addition, the segmentation image is not the unit of an object such as a person or a car, but the data divided according to the attributes such as similar colors. Further, although the distance value is not used such as the foreground and the background or the intermediate layer thereof, the data divided according to the distance is also called a segmentation image.
The second image data may be input from a device other than the image
以上のように、第2画像データが第1画像データに対して低解像度であり、第1画像データが補正に対する基準となるデータであれば、実施形態1〜3と同様にデータ処理を施すことができる。データに依っては、補正対象データが複数になることはあるがそれぞれ基本的な処理は変わらない。例えば、動き画像の場合には横方向の動き画像の補正処理と縦方向の画像の補正処理は独立に同様の手法を用いて行われる。 As described above, if the second image data has a lower resolution than the first image data and the first image data is the reference data for the correction, the data processing is performed in the same manner as in the first to third embodiments. Can be done. Depending on the data, there may be a plurality of data to be corrected, but the basic processing does not change for each. For example, in the case of a motion image, the horizontal motion image correction process and the vertical image correction process are independently performed by using the same method.
本実施形態によれば、距離画像データに依らずアップサンプリングによるエラーを持ったデータに適用することで、信頼度を設定することができ、それを基に補正処理を行うことにより、効率的にかつより高精度なデータに補正することが可能となる。 According to this embodiment, the reliability can be set by applying it to data having an error due to upsampling regardless of the distance image data, and by performing correction processing based on the reliability, it is efficient. Moreover, it is possible to correct the data with higher accuracy.
(実施形態5)
実施形態1〜4では、画像データ処理装置が、第1画像データ(例えば輝度画像データ)と、第1画像データよりも低解像度の第2画像データ(例えば距離画像データ)を取得または生成し、第2画像データに対してアップサンプリングを施していた。言い換えると、実施形態1〜4では、距離マップ生成部132とアップサンプリング部133が画像データ取得手段に相当し、高解像度の第2画像データを取得している。
(Embodiment 5)
In the first to fourth embodiments, the image data processing apparatus acquires or generates the first image data (for example, brightness image data) and the second image data (for example, distance image data) having a resolution lower than that of the first image data. Upsampling was performed on the second image data. In other words, in the first to fourth embodiments, the distance
しかしながら、拡大された高解像度の第2画像データが利用できればよく、その取得方法は特に限定されない。例えば、画像データ処理装置が、低解像度の第2画像データを取得してこれを拡大して高解像度の第2画像データを生成してもよい。また、画像データ処理装置が、拡大までされた第2画像データを外部装置から取得してもよい。この場合は、2種類の手法でアップサンプリングを行って信頼度を行う実施形態1,2においては、画像データ処理装置は、入力データとは異なる1つの手法のみによるアップサンプリング処理を行ってもよい。入力されたアップサンプリング後画像データと、生成したアップサンプリング後画像データを用いて、信頼度マップを生成できるためである。また、信頼度マップの生成にアップサンプリング後の画像データが必要ない実施形態3においては、画像データ処理装置はアップサンプリング部を有しなくてもよい。 However, it suffices if the enlarged high-resolution second image data can be used, and the acquisition method thereof is not particularly limited. For example, the image data processing device may acquire low-resolution second image data and enlarge it to generate high-resolution second image data. Further, the image data processing device may acquire the enlarged second image data from the external device. In this case, in the first and second embodiments in which upsampling is performed by two types of methods to perform reliability, the image data processing apparatus may perform upsampling processing by only one method different from the input data. .. This is because the reliability map can be generated by using the input post-upsampling image data and the generated post-upsampling image data. Further, in the third embodiment in which the image data after upsampling is not required for the generation of the reliability map, the image data processing apparatus does not have to have an upsampling unit.
また、信頼度マップを生成するだけでアップサンプリング後の第2画像データの補正処
理を施さない場合や、補正処理に第1画像データを用いない場合には、画像データ処理装置は必ずしも第1画像データを取得する必要はない。
Further, when the reliability map is only generated and the correction processing of the second image data after upsampling is not performed, or when the first image data is not used for the correction processing, the image data processing device does not necessarily use the first image. There is no need to get the data.
(実施形態6)
上述した本発明の画像処理方法は、例えば、デジタルカメラやカムコーダなどの撮像装置、或いは撮像装置で得られた画像データに対し画像処理を施す画像処理装置やコンピュータなどに好ましく適用できる。また、このような撮像装置或いは画像処理装置を内蔵する各種の電子機器(携帯電話、スマートフォン、スレート型端末、パーソナルコンピュータを含む)にも本発明の技術を適用可能である。上記実施形態では撮像装置の本体に画像処理装置の機能を組み込んだ構成を示したが、画像処理装置の機能はどのように構成してもよい。例えば、撮像装置を有するコンピュータに画像処理装置を組み込み、撮像装置で撮影した画像をコンピュータが取得して、それに基づいて上記画像処理方法を実行するようにしてもよい。また、有線あるいは無線によりネットワークアクセス可能なコンピュータに画像処理装置が組み込まれて、そのコンピュータがネットワークを介して複数枚の画像を取得し、それに基づいて上記画像処理方法を実行するようにしてもよい。得られた距離情報は、例えば、画像の領域分割、立体画像や奥行き画像の生成、ぼけ効果のエミュレーションなどの各種画像処理に利用することができる。
(Embodiment 6)
The image processing method of the present invention described above can be preferably applied to, for example, an image pickup device such as a digital camera or a camcorder, or an image processing device or a computer that performs image processing on image data obtained by the image pickup device. Further, the technique of the present invention can be applied to various electronic devices (including mobile phones, smartphones, slate terminals, personal computers) incorporating such an image pickup device or an image processing device. In the above embodiment, the configuration in which the function of the image processing device is incorporated in the main body of the image processing device is shown, but the function of the image processing device may be configured in any way. For example, an image processing device may be incorporated into a computer having an image pickup device, the computer may acquire an image captured by the image pickup device, and the image processing method may be executed based on the acquired image. Further, an image processing device may be incorporated into a computer that can access the network by wire or wirelessly, and the computer may acquire a plurality of images via the network and execute the above image processing method based on the acquisition of a plurality of images. .. The obtained distance information can be used for various image processing such as region division of an image, generation of a stereoscopic image or a depth image, and emulation of a blur effect.
なお、上記装置への具体的な実装は、ソフトウェア(プログラム)による実装とハードウェアによる実装のいずれも可能である。例えば、撮像装置などに内蔵されたコンピュータ(マイコン、FPGA等)のメモリにプログラムを格納し、当該プログラムをコンピュータに実行させることで、本発明の目的を達成するための各種処理を実現してもよい。また、本発明の全部又は一部の処理を論理回路により実現するASIC等の専用プロセッサを設けることも好ましい。 The specific mounting on the above device can be either software (program) mounting or hardware mounting. For example, even if a program is stored in the memory of a computer (microcomputer, FPGA, etc.) built in an imaging device or the like and the program is executed by the computer, various processes for achieving the object of the present invention can be realized. Good. It is also preferable to provide a dedicated processor such as an ASIC that realizes all or part of the processing of the present invention by a logic circuit.
13 画像データ処理装置
132 距離マップ生成部
134 信頼度データ決定部
13 Image
Claims (18)
前記高解像度画像データの画素値の信頼度を表す信頼度データを決定する信頼度データ決定手段と、
前記高解像度画像データを補正する補正手段と、
を備え、
前記信頼度データ決定手段は、
前記高解像度画像データの対象画素の画素位置に対応する前記低解像度画像データにおける画素位置の近傍画素の画素値に基づいて決定される第1の評価値と、前記第1の評価値とは異なる方法によって前記近傍画素の画素値に基づいて決定される第2の評価値と、の比較に基づいて、前記高解像度画像データの前記対象画素の画素値の信頼度を決定し、
前記補正手段は、前記信頼度データおよび前記第3の画像データに基づいて、前記高解像度画像データを当該高解像度画像データの画素値を用いて補正する、
ことを特徴とする画像データ処理装置。 Image data obtained with the low-resolution image data, and a high-resolution image data is image data obtained by up-sampling the low-resolution image data, and third image data corresponding to the low resolution image data and the high resolution image data Acquisition method and
A reliability data determining means for determining reliability data representing the reliability of pixel values of the high-resolution image data, and
A correction means for correcting the high-resolution image data and
With
The reliability data determination means is
The first evaluation value determined based on the pixel values of pixels in the vicinity of the pixel position in the low-resolution image data corresponding to the pixel position of the target pixel of the high-resolution image data is different from the first evaluation value. The reliability of the pixel value of the target pixel of the high-resolution image data is determined based on the comparison with the second evaluation value determined based on the pixel value of the neighboring pixel by the method .
The correction means corrects the high-resolution image data using the pixel values of the high-resolution image data based on the reliability data and the third image data.
An image data processing device characterized by this.
前記画像データ取得手段は、前記低解像度画像データを第1の補間方法を用いて前記アップサンプリング手段によってアップサンプリングすることで第1の高解像度画像データを取得し、かつ、前記低解像度画像データを前記第1の補間方法とは異なる第2の補間方法を用いて前記アップサンプリング手段によってアップサンプリングすることで第2の高解像度画像データを取得し、
前記信頼度データ決定手段は、前記第1の高解像度画像データの前記対象画素の画素値を前記第1の評価値として用い、前記対象画素に対応する前記第2の高解像度画像データの画素値を前記第2の評価値として用いる、
請求項1に記載の画像データ処理装置。 Further equipped with upsampling means for upsampling image data,
The image data acquisition means acquires the first high-resolution image data by upsampling the low-resolution image data by the upsampling means using the first interpolation method, and obtains the low-resolution image data. The second high-resolution image data is acquired by upsampling by the upsampling means using a second interpolation method different from the first interpolation method.
The reliability data determining means uses the pixel value of the target pixel of the first high-resolution image data as the first evaluation value, and the pixel value of the second high-resolution image data corresponding to the target pixel. Is used as the second evaluation value.
The image data processing apparatus according to claim 1.
請求項2に記載の画像データ処理装置。 The first interpolation method is bilinear interpolation, and the second interpolation method is nearest neighbor interpolation.
The image data processing apparatus according to claim 2.
請求項2または3に記載の画像データ処理装置。 The image data acquisition means acquires either the first high-resolution image data or the second high-resolution image data as the high-resolution image data.
The image data processing apparatus according to claim 2 or 3.
請求項1から4のいずれか1項に記載の画像データ処理装置。The image data processing apparatus according to any one of claims 1 to 4.
請求項1から5のいずれか1項に記載の画像データ処理装置。The image data processing apparatus according to any one of claims 1 to 5.
請求項1から6のいずれか1項に記載の画像データ処理装置。 The low-resolution image data and the high-resolution image data are distance image data, motion image data, or segmentation image.
The image data processing apparatus according to any one of claims 1 to 6.
前記低解像度画像データにおける前記近傍画素の画素値の、第1の重み係数を用いた重み付け平均値を前記第1の評価値として決定し、
前記低解像度画像データにおける前記近傍画素の画素値の、前記第1の重み係数とは異なる第2の重み係数を用いた重み付け平均値を前記第2の評価値として決定する、
請求項1に記載の画像データ処理装置。 The reliability data determination means is
The weighted average value of the pixel values of the neighboring pixels in the low-resolution image data using the first weighting coefficient is determined as the first evaluation value.
The weighted average value of the pixel values of the neighboring pixels in the low-resolution image data using a second weighting coefficient different from the first weighting coefficient is determined as the second evaluation value.
The image data processing apparatus according to claim 1.
請求項8に記載の画像データ処理装置。 The first weighting factor and the second weighting factor are determined according to the distance from the pixel in the low resolution image data corresponding to the target pixel of the high resolution image data.
The image data processing apparatus according to claim 8.
請求項9に記載の画像データ処理装置。 One of the first weighting coefficient and the second weighting coefficient is the weight of the pixel closest to the pixel in the low-resolution image data corresponding to the target pixel of the high-resolution image data among the neighboring pixels. Is determined to be 1 and the weights of the other pixels are determined to be 0,
The image data processing apparatus according to claim 9.
請求項9または10に記載の画像データ処理装置。 At least one of the first weighting coefficient and the second weighting coefficient is determined by a Gaussian function according to the distance from the pixel in the low-resolution image data corresponding to the target pixel of the high-resolution image data. ,
The image data processing apparatus according to claim 9 or 10.
請求項9から11のいずれか1項に記載の画像データ処理装置。 One of the first weighting coefficient and the second weighting coefficient is determined as a value inversely proportional to the distance from the pixel in the low-resolution image data corresponding to the target pixel of the high-resolution image data.
The image data processing apparatus according to any one of claims 9 to 11.
請求項1に記載の画像データ処理装置。 The reliability data determining means sets the difference between the maximum value and the minimum value of the pixel values of the pixels in the vicinity of the pixels in the low resolution image data corresponding to the target pixels of the high resolution image data as the first evaluation value, and sets the target. 0 is set as the second evaluation value regardless of the pixel.
The image data processing apparatus according to claim 1.
前記信頼度データ決定手段は、前記第1の評価値と前記第2の評価値の差が所定の閾値以下であれば、前記対象画素の信頼度を信頼できることを表す信頼度として決定し、前記差が前記所定の閾値よりも大きければ、前記対象画素の信頼度を信頼できないことを表す信頼度として決定する、
請求項1から13のいずれか1項に記載の画像データ処理装置。 The reliability is binary information indicating whether the pixel value is reliable or unreliable.
If the difference between the first evaluation value and the second evaluation value is equal to or less than a predetermined threshold value, the reliability data determining means determines the reliability of the target pixel as a reliability indicating that the reliability is reliable. If the difference is larger than the predetermined threshold value, the reliability of the target pixel is determined as the reliability indicating that the target pixel is unreliable.
The image data processing apparatus according to any one of claims 1 to 13.
請求項1から13のいずれか1項に記載の画像データ処理装置。 The reliability data determining means determines the reliability of the target pixel so that the larger the difference between the first evaluation value and the second evaluation value, the lower the reliability.
The image data processing apparatus according to any one of claims 1 to 13.
請求項1から15のいずれか1項に記載の画像データ処理装置と、
を備え、
前記画像データ取得手段は、前記撮像素子から撮影画像データを取得し、前記撮影画像データから前記低解像度画像データを生成し、前記低解像度画像データを拡大して前記高解像度画像データを取得する、
撮像装置。 With the image sensor
The image data processing apparatus according to any one of claims 1 to 15.
With
The image data acquisition means acquires captured image data from the imaging element, generates the low-resolution image data from the captured image data, enlarges the low-resolution image data, and acquires the high-resolution image data.
Imaging device.
低解像度画像データと、当該低解像度画像データをアップサンプリングした画像データである高解像度画像データと、前記低解像度画像データおよび前記高解像度画像データに対応する第3の画像データとを取得する画像データ取得ステップと、
前記高解像度画像データの画素値の信頼度を表す信頼度データを決定する信頼度データ決定ステップと、
前記高解像度画像データを補正する補正ステップと、
を含み、
前記信頼度データ決定ステップでは、
前記高解像度画像データの対象画素の画素位置に対応する前記低解像度画像データにおける画素の近傍画素から第1の評価値を決定し、
前記高解像度画像データの対象画素の画素位置に対応する前記低解像度画像データにおける前記画素の前記近傍画素から、前記第1の評価値とは異なる方法により、第2の評価値を決定し、
前記第1の評価値と前記第2の評価値の比較に基づいて、前記高解像度画像データの前記対象画素についての信頼度を決定し、
前記補正ステップでは、前記信頼度データおよび前記第3の画像データに基づいて、前記高解像度画像データを当該高解像度画像データの画素値を用いて補正する、
画像データ処理方法。 This is an image data processing method performed by an image data processing device.
Image data obtained with the low-resolution image data, and a high-resolution image data is image data obtained by up-sampling the low-resolution image data, and third image data corresponding to the low resolution image data and the high resolution image data Acquisition steps and
A reliability data determination step for determining reliability data representing the reliability of pixel values of the high-resolution image data, and
The correction step for correcting the high-resolution image data and
Including
In the reliability data determination step,
The first evaluation value is determined from the nearby pixels of the pixels in the low-resolution image data corresponding to the pixel positions of the target pixels of the high-resolution image data.
A second evaluation value is determined from the neighboring pixels of the pixel in the low-resolution image data corresponding to the pixel position of the target pixel of the high-resolution image data by a method different from the first evaluation value.
Based on the comparison between the first evaluation value and the second evaluation value, the reliability of the high-resolution image data for the target pixel is determined .
In the correction step, the high-resolution image data is corrected using the pixel values of the high-resolution image data based on the reliability data and the third image data.
Image data processing method.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/355,197 US10679326B2 (en) | 2015-11-24 | 2016-11-18 | Image data processing apparatus and image data processing method that determine confidence data indicating a level of confidence in a pixel value in high resolution image data |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015229063 | 2015-11-24 | ||
| JP2015229063 | 2015-11-24 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017103756A JP2017103756A (en) | 2017-06-08 |
| JP2017103756A5 JP2017103756A5 (en) | 2019-11-14 |
| JP6838918B2 true JP6838918B2 (en) | 2021-03-03 |
Family
ID=59017125
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016195495A Active JP6838918B2 (en) | 2015-11-24 | 2016-10-03 | Image data processing device and method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6838918B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220085283A (en) | 2020-12-15 | 2022-06-22 | 삼성전자주식회사 | Electronic apparatus and controlling method thereof |
| GB2608496B (en) * | 2021-05-07 | 2024-04-24 | Canon Kk | Image processing apparatus and method, and image capturing apparatus and control method thereof, program, and storage medium |
| CN116309058B (en) * | 2023-03-15 | 2024-04-19 | 长沙观谱红外科技有限公司 | Human body infrared image amplification processing method |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3578613B2 (en) * | 1997-12-03 | 2004-10-20 | 富士写真フイルム株式会社 | Image data interpolation method and apparatus |
| JP3173496B2 (en) * | 1998-04-06 | 2001-06-04 | セイコーエプソン株式会社 | Image data interpolation apparatus, computer for image data interpolation processing, image data interpolation method, and medium recording image data interpolation program |
| US20030218621A1 (en) * | 2002-05-24 | 2003-11-27 | Jiande Jiang | Method and system for edge-adaptive interpolation for interlace-to-progressive conversion |
| JP2006011967A (en) * | 2004-06-28 | 2006-01-12 | Fuji Xerox Co Ltd | Character recognition device and character recognition program |
| JP4490351B2 (en) * | 2005-08-29 | 2010-06-23 | 日本電信電話株式会社 | Inter-layer prediction processing method, inter-layer prediction processing apparatus, inter-layer prediction processing program, and recording medium therefor |
| JP4784322B2 (en) * | 2006-01-31 | 2011-10-05 | ソニー株式会社 | Image processing device |
| KR101498532B1 (en) * | 2008-10-15 | 2015-03-04 | 스피넬라 아이피 홀딩스, 인코포레이티드 | Digital processing method and system for determination of optical flow |
| JP6236259B2 (en) * | 2013-09-06 | 2017-11-22 | 株式会社東芝 | Image processing apparatus, image processing method, and image processing program |
| JP6308748B2 (en) * | 2013-10-29 | 2018-04-11 | キヤノン株式会社 | Image processing apparatus, imaging apparatus, and image processing method |
-
2016
- 2016-10-03 JP JP2016195495A patent/JP6838918B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017103756A (en) | 2017-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12022196B2 (en) | Dual aperture zoom camera with video support and switching / non-switching dynamic control | |
| CN111667416B (en) | Image processing method, image processing device, learning model manufacturing method, and image processing system | |
| US10679326B2 (en) | Image data processing apparatus and image data processing method that determine confidence data indicating a level of confidence in a pixel value in high resolution image data | |
| JP5980294B2 (en) | Data processing apparatus, imaging apparatus, and data processing method | |
| JP6308748B2 (en) | Image processing apparatus, imaging apparatus, and image processing method | |
| JP5517746B2 (en) | Image processing apparatus and method | |
| US11508038B2 (en) | Image processing method, storage medium, image processing apparatus, learned model manufacturing method, and image processing system | |
| JP5468404B2 (en) | Imaging apparatus and imaging method, and image processing method for the imaging apparatus | |
| JP6164564B1 (en) | Image processing apparatus, image processing method, recording medium, program, and imaging apparatus | |
| JP5984493B2 (en) | Image processing apparatus, image processing method, imaging apparatus, and program | |
| JP2013030895A (en) | Signal processing apparatus, imaging apparatus, signal processing method, and program | |
| JP6906947B2 (en) | Image processing equipment, imaging equipment, image processing methods and computer programs | |
| CN113516596A (en) | Image processing method, image processing device, image processing system and storage medium | |
| JP2016151955A (en) | Image processing apparatus, imaging device, distance measuring device, and image processing method | |
| JP2013061850A (en) | Image processing apparatus and image processing method for noise reduction | |
| JP7516471B2 (en) | Control device, imaging device, control method, and program | |
| JP6838918B2 (en) | Image data processing device and method | |
| JP2017045273A (en) | Image processing apparatus, image processing method, and program | |
| JP6105960B2 (en) | Image processing apparatus, image processing method, and imaging apparatus | |
| Manne et al. | Asymmetric wide tele camera fusion for high fidelity digital zoom | |
| JP2017130106A (en) | Data processing apparatus, imaging apparatus and data processing method | |
| CN113379608A (en) | Image processing method, storage medium and terminal equipment | |
| JP2016201600A (en) | Image processing apparatus, imaging device, image processing method, image processing program, and storage medium | |
| JP2017182668A (en) | Data processor, imaging device, and data processing method | |
| JP6808770B2 (en) | Data processing equipment, imaging equipment, and data processing methods |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20181116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191002 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191002 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200805 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200811 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201012 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210212 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6838918 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |