発明の詳細な説明
発明の特徴および他の詳細は、発明の段階として、または発明の一部の組合せとしてのいずれかで、ここでより具体的に記載され、特許請求の範囲において指摘される。発明の具体的な態様は、発明の限定としてではなく例示のために示されることが理解されよう。この発明の原理的な特徴は、発明の範囲を逸脱することなく、種々の態様に使用され得る。
例として、図1〜57に示される一態様において、発明は、遠位グリップ5530および遠位グリップ5530の一端から伸長するハンドル体5540、該ハンドルは遠位グリップ5530およびハンドル体5540の全長の一部に沿って導管および溝(track)5542を画定する、を含むハンドル;導管内の内部リードスクリューアセンブリ5510、該内部リードスクリューアセンブリ5510は、導管の主軸に沿って可動であり、溝5542を通って伸長するねじ部5512を含む;ハンドル体5540の周囲に伸長し、かつ内部リードスクリューアセンブリ5510のねじ部5512に差し込まれるように嵌合するリードスクリューナット5520を含む、ステントグラフト送達システム5500であり、ここで遠位グリップ5530に隣接しながらリードスクリューナット5520を回転することにより、ハンドルに対して内部リードスクリューアセンブリ5510の移動が生じ、リードスクリューナット5520は同時に、内部リードスクリューアセンブリ5510と嵌合しながらハンドル体5540に沿って摺動可能であり、それにより、ハンドルに対して内部リードスクリューアセンブリ5510の移動を生じるための少なくとも2つの機構が提供される。
図57Aを参照すると、ステントグラフト送達システムはさらに、ハンドル体に固定された支持部材5740、および支持部材5740の一部の周囲に伸長し、直接またはスライダー5700を介して内部リードスクリューアセンブリ5510に固定される外部シース5550を含み得、ハンドル体5540および内部リードスクリューアセンブリ5510の相対的な移動により、支持部材5740および外部シース5550の相対的な移動が生じる。
発明のステントグラフト送達システム5500の内部リードスクリューアセンブリ5510は、ハンドルと本質的に同軸上にある開口を画定し得、図55Aに示されるように、該支持部材は、内部リードスクリューアセンブリを通って伸長する。
図57Aの挿入図に見られるように、支持部材5740は、ハイポチューブ5742およびハイポチューブ5742内の支持チューブ5744を含む。ハイポチューブ5742は典型的に、ステンレス鋼で形成され、支持チューブ5744は典型的にナイロン、例えばVESTAMID(登録商標)で形成される。ハイポチューブ5742は、図56に示されるように(図33の末端キャップ3350としても示される)、近位端キャップ5544などで、ハンドル体に固定される。また図57Aの挿入図に示されるように、支持部材5740は、一部ではないが、遠位頂部捕捉部8610につながれる伸長部8614、および近位頂部捕捉部8600aにつながれる管腔8613であり、その全てが図86Dに示される。
発明のステントグラフト送達システムは、スライダー5700をさらに含み得る。ステントグラフト送達システムのスライダー5700は、中央開口部(orifice)を画定し、該中央開口部を通って支持部材5740が伸長するスライダー体5720、中央開口部に対して実質的に垂直に伸長するフラッシュ弁開口部5712、内部リードスクリューアセンブリ5510に取り外し可能に固定され得るスライダー体5720(図55A、例えば、図62および63に示されるように、内部リードスクリューアセンブリを通ってスライダーに伸長する解放ピン6210などの適切な手段による)、スライダー体5720の遠位端に連結されたスライダーキャップ5710(該スライダーキャップ5710は、スライダー体5720の中央開口部と実質的に直線に並んだ中央開口部を画定し、該中央開口部を通って支持部材5740が伸長する)、スライダー体5720に差し込まれるように連結されるシース弁ノブ5790、スライダーキャップ5710の遠位端から伸長する外部シース5550(該外部シース5550は、スライダー体5720の中央開口部と実質的に直線に並んだ管腔を画定し、該管腔を通って、支持部材5740が伸長する)、フラッシュ弁開口部5712の近位のスライダー体の中央開口部のワイパー弁5750(該ワイパー弁5750は、支持部材の周囲に密封を形成する)、ワイパー弁5750の近位のスライダー体の中央開口部のx弁5760(該x弁5760は、スライダー体5720から支持部材を引き抜く際に支持チューブ5744内のガイドワイヤの周囲に密封を形成する)、およびスライダー体5720の中央開口部にあり、かつx弁5760の近位にあるシース弁5770(該シース弁5770は、中央開口部を密封するためにノブ5790を作動することにより操作可能である)を含む。
一態様において、x弁5760は、図57B〜57Fに示されるようにニチノールガスケットを含む。
「近位」は、送達システム、または頂部捕捉デバイス、ステントグラフト送達システムのためのスライダーもしくはレグクラスプなどの送達システムの構成要素について参照がなされる場合、デバイスを使用する臨床医に最も近いことを意味する。同様に、「遠位」は、送達システム、または頂部捕捉デバイス、ステントグラフト送達システムのためのスライダーもしくはレグクラスプなどの送達システムの構成要素について参照がなされる場合、デバイスを使用する臨床医から離れていることを意味する。
「ステント」または「ステントグラフトシステム」について参照がなされる場合、「近位」は、該ステントまたはステントグラフトシステムの末端が患者の心臓に向かうことを意味し、「遠位」は、ステントまたはステントグラフトシステムの末端が患者の心臓から離れることを意味する。
別の態様において、発明は、ステントグラフト送達システムのためのスライダー5700であり、該スライダー5700は、中央開口部を画定し、該中央開口部を通って支持部材5740が伸長するスライダー体5720および該中央開口部に対して実質的に垂直に延びているラッシュ弁開口部5712(該スライダー体5720は、内部リードスクリューアセンブリ5510に対して取り外し可能に固定可能である(図55および56));スライダー体の遠位端に連結されたスライダーキャップ5710(図57A)(該スライダーキャップ5710は、スライダー体5720の中央開口部と実質的に直線に並んだ中央開口部を画定し、該中央開口部を通って支持部材が伸長する);スライダー体5720に差し込まれるように連結されたノブ5790;スライダーキャップ5710の遠位端から伸長する外部シース5550(該外部シース5550は、スライダー体5720の中央開口部と実質的に直線に並んだ管腔を画定し、該管腔を通って支持部材5740が伸長する);フラッシュ弁開口部5712の近位のスライダー体5720の中央開口部のワイパー弁5750(該ワイパー弁5750は、支持部材5740の周囲に密封を形成する);ワイパー弁5750の近位にあるスライダー体5720の中央開口部のx弁5760(該x弁5760は、スライダー体5720から支持部材5740を引き抜く際に制御チューブ5744内のガイドワイヤの周囲に密封を形成する)、およびスライダー体5720の中央開口部にあり、かつx弁5760の近位にあるシース弁5770(該シース弁5770は、中央開口部を密封するために、ノブ5790作動させることにより操作可能である)を含む。
図61〜64Bは、発明の送達システムの態様である。
ここで、図1〜3を参照すると、本発明の改善されたピンおよびプル(pin-and-pull)送達システム100の例示的な態様が示される。ピンおよびプル送達システム100は、内部管腔または外部シース制御管腔内に摺動可能に配置された第2のハンドル110または外部ハンドル120を提供する。管腔110、120のこの配置はまた、入れ子式のアセンブリともいわれ得る。外部シース制御管腔120は、例示されないステントグラフトを収容するために使用されるシース130に対して、長手方向にかつ回転するように固定される。
例示態様において、外部シース制御管腔120は、シース130に取り付けられたシースハブ140に取り付けられるアルミニウム製のチューブである。内部管腔110は、長手方向のカットスロット310(例えば図3参照)を有するポリカーボネート製のチューブである。内部管腔110は、押し棒150(例えばステンレス鋼ハイポチューブ)に対して、長手方向にかつ回転するように固定される。外部ハンドル120をシースハブ140に取り付けることにより、第2のハンドル110は、外部ハンドル120内に収縮され得、スロット310に嵌合されたステントスクリュー320の存在により、ハンドル110、120の回転性の並びを維持する。溝(groove)およびセットスクリューの配置は、ステントグラフトが展開される場合に、望ましい埋め込みの位置からプロテーゼを望ましくないようにねじる動きであるシース130の回転を防ぐ。このデバイスは、押し棒150に対して止血160がハンドル機構110、120の前にあるので、取り外し可能なシースとともに使用する場合に有利である。
図4〜6は、二又のステントグラフトを埋め込むために図1〜3の送達システムをどのように使用し得るかを図示する。圧縮された二又のステントグラフト410を標的部位に配置する場合、該送達システムは、患者にピン留めされる。外部ハンドル120は、図4に示される位置から図5に示される位置へと近位方向に引かれる。外部ハンドル120を十分に収縮された位置に配置すると(図5)、ステントグラフト410は、患者の脈管内でほぼ完全に展開される。ステントグラフト410の残りの制御は、該送達システムの頂部捕捉デバイス510によりベアステント頂部412を切り離し可能に掴むことのみである。捕捉デバイス510の制御は、押し棒150の最も近位の端で起こる。頂部捕捉デバイス510およびその制御アセンブリの1つの例示的な態様は、2003年9月3日に出願された米国仮特許出願第60,499/652号および2004年2月23日に出願された米国特許出願第10/784,462号で始まる出願のファミリーに開示され、該出願およびそのファミリー全体は、それらの全体において参照により明細書に援用される。かかる態様において、押し棒150の内部の例示されない制御棒は、押し棒150に対して動き(図6の矢印A)、制御表面から、露出されたベアステント頂部412の1つ以上を掴む歯(tine)が分離される。この動きにより間に隙間が生じ、それらの制御される捕捉から頂部412が解放される。
図5および6に図示される態様に対する代替的な態様を図7〜9に示す。このハンドル700は、導入器外部シースの収縮に機械的な利点を付加することによりステントグラフトの展開の制御および正確性を向上する。機械的な利点により、外部シースの「滑らかな」収縮が可能になるが、外部シースの収縮の際に予期しないジャンピングまたは急な引っ張りを引き起こす圧縮されたステントグラフト内に蓄えられる潜在的なエネルギーの蓄積は起こらない。より具体的に、ハンドル700は、2つの中間連結部:中空外部シースハンドル710および内部スクリューハンドル720を有する。外部シースハンドル710の近位端は、内部スクリューハンドル720の遠位端をその中に収容するための内部空洞を有する。
外部シースハンドル710を内部スクリューハンドル710に連結するための1つの例示的な態様を図10および11に示す。シースハンドル710のねじ嵌合部712は、図10に図示されるように、互いに長手方向にずれる(offset)、2つの反対にあるねじ嵌合デバイス714、716を有する。デバイスの1つ714は、例えばボールスクリューであり得、他方のデバイス716はセットスクリューであり得る。外部中空シースハンドル710の内表面は、この特定の態様においては滑らかである。外部シースハンドル710と内部スクリューハンドル720のねじ726の嵌合は、デバイス714、716を内部スクリューハンドル720のねじに乗せることによりなされる。 したがって、内部スクリューハンドル720の回転により、制御された様式で、内部スクリューハンドル720の遠位端に対して外部シースハンドル710が収縮されるか、または該遠位端から伸長する。回転は、内部スクリューハンドル720に回転するように固定された近位回転ノブ722により補助され得る。
ねじ726は、ステントグラフトの展開に必要な最大の力を超えるのに必要な量よりも大きい長手方向の長さまで伸長する。力の最大点を超えると、ハンドルが急に持ち上がる機会またはすべり量が低下し、そのため2つのハンドル部710、720は、互いに自由に長手方向に移動し得る。長手方向の制御されたゆっくりの動きから長手方向の自由な動き(および所望の場合は素早い)への移り変わりを達成するために、内部スクリューハンドル720のねじの近位端で、スクリューチャンネル724は、スクリューハンドル720の反対の面で、ねじ嵌合デバイス716がチャンネル724の1つにはまり(fall into)、ねじ嵌合デバイス714が他のチャンネル(示さず)にはまることを可能にするように、ハンドル体に食い込み得る。ねじ嵌合デバイス714は、例えばボールスクリューであり得、ねじを比較的堅いねじ嵌合デバイス716、例えばセットスクリューに対して中心化するために使用され得るので、この配置においては該ボールスクリューが望ましい。デバイス714、716がねじに与える力を変えることは、ボールセットスクリューのボールに対する張力を調整すること、またはハンドル710に対するセットスクリューの深さを浅くすることにより達成され得る。
例えば、図12、13、14、15A、15B、15Cおよび15Dの模式図に、ハンドル700の機能を図示する。内部スクリューハンドル720を回転して外部シースハンドル710を収縮させる前、外部シース管腔1210は、ステントグラフト1220を完全に覆い、該ステントグラフトは外部シース管腔内で、ノーズコーン1230のすぐ後ろ(近位)で充填される。回転ノブ722を回して、外部シースハンドル710を近位に動かし、外部シース管腔1210からステントグラフト1220が展開され始める。使用者は、内部スクリューハンドル720を回転しながら長手方向に定位に維持するので、外部シース管腔1210は近位に移動する。該工程を図13に示す。シースハンドル710のねじ嵌合部712からねじ726(図12)が完全に分離されると、外部シースハンドル710は、内部スクリューハンドル720に対し依然として長手方向に自由に動きながら、チャンネル724内に回転するように固定(lock)される。この時点でベアステント1310および第1の密封ステントが露出される。チャンネルロックが生じた後、ステントグラフト1220の近位端は、図13に示されるように外部シース管腔1210から露出される。ねじ嵌合デバイス714、716(図11)を反対側におき、チャンネル724(図12)にロックすると、外部シースハンドル710は、内部スクリューハンドル720に対してこれ以上回転できなくなり、ここで、使用者は所望のように近位に動かし得る。したがって、外部シース管腔1210は、図14に示すようにステントグラフト1220のボディ部全体が露出されるように収縮され得る。この時点で、外部シースハンドル710は、内部スクリューハンドル720を越えて回転ノブ722にまで配置され、ステントグラフト1220は、頂部クラスプデバイス1410により送達システム700のみまで維持される。頂部クラスプデバイス1410を解放すると、ステントグラフト1220は送達システム700から解放され、その後送達システム700は、ステントグラフト1220の埋め込みに衝撃を与えることなく患者から取り出され得る。
図12、13、14、15A、15B、15Cおよび15Dの送達システム700は、28mm x 150mmのグラフトにより、例えば19.5 French OD編み込み導入器シースに充填され得る。この配置において、送達システムは、グラフトの第1の区画(ベアステント1310および第1の密封ステント1320)を解放するためにスクリュー機構により適用される機械的な利点を使用して、二又のステントグラフト1220を展開し得る。次いで、ステントグラフトの残りは、ねじ726を分離した後に、デバイスのピンおよびプルアセンブリにより展開され得る。この配置は、医師がねじを能動的に分離するための任意の要件を排除する。
図1〜15に示される入れ子式の配置により達成される利点は、図15A、15B、15Cおよび15Dを参照して示される。先行技術のピンおよびプルシステムでは、掴まれる場所が曲がり易かったので、展開の際に内部安定化部材に望ましくない力がかかった(図15A、15B、15Cおよび15D)。この曲りにより、シースハブと、内部安定化部材の並びのずれ(misalignment)が起こり、次いで外部シースを収縮するために、医師が展開する力を高めることが必要になり、それに対応して内部安定化部材に対して力が増加した(損傷サイクル)。
外部シースハンドル710を内部スクリューハンドル720に連結するための図7、8、9、10、11、12、13、14、15A、15B、15Cおよび15Dの2つの部分の制御された展開の代替物を図16〜23に図示する。これらの図には、ステントグラフトの制御された安全な展開を補助する機械的ハンドル1600が図示される。この配置は、導入器シースの収縮に、機械的な利点を付加し、それにより外部シースの「滑らかな」収縮が可能になるが、外部シースの収縮の際に、予期しないジャンプまたは急な突き上げの動きを引き起こす、圧縮されたステントグラフト内に蓄えられる潜在的なエネルギーの蓄積は可能にならない。
外部シースハンドル1610の遠位嵌合部1612は、その中に内部スクリューハンドル1620のねじ部1622を収容するための内部にねじが入った穴(bore)を有する。例示的な態様において、遠位嵌合部1612は、DELRIN(登録商標)で作製される。外部シースハンドル1610と内部スクリューハンドル720(図7)の嵌合は、内部スクリューハンドル1620に対して、外部シースハンドル1610を回転することによりなされる。これにより、外部シースハンドル1610が、制御された様式で、内部スクリューハンドル1620の遠位端に対して収縮するか、または該遠位端から伸長する。回転は、内部スクリューハンドル1620に回転するように固定された近位回転ノブ1624により補助され得る。
ねじ部1622は、ステントグラフトの展開に必要な最大の力を超えるのに必要な量よりも大きい、長手方向の全長まで伸長する。力の最大点を超えると、ハンドルが急に持ち上がる機会またはすべり量が低減し、それにより2つのハンドル部1610、1620は、互いに自由に長手方向に移動し得る。長手方向の制御されたゆっくりの移動から長手方向の自由な移動(および所望の場合、迅速)への移り変わりを達成するために、スクリューハンドル1620のねじの近位端、チャンネル1626(またはより多くのチャンネル、例えば2つの反対にあるチャンネル)は、内部スクリューハンドル1620に食い込み得る。遠位嵌合部1612に図示されないセットスクリューが配置され、内部に突出し、ねじ部1622と嵌合する。2つのハンドル部1610、1620を回転させてねじ部1622の近位の内部に突出したセットスクリューから充分に離されるように移動させる場合、セットスクリューは、チャンネル1626に直接のる(またはセットスクリューはチャンネル1626に直接)。セットスクリューは、2つのハンドル部1610、1620を、互いに回転させるための張力を増減するために使用され得るので、この配置において望ましい。ねじ部1622に付与する力を変えることは、遠位端嵌合部1612へのセットスクリューの深さを増減することにより達成され得る。
ハンドル1600の機能を、例えば図20〜23の模式図に図示する。内部スクリューハンドル1620を回転させて外部シースハンドル1610を収縮させる前、外部シース管腔2010は、ステントグラフト2020を完全に覆い、該ステントグラフトは、該管腔内で、ノーズコーン2030のすぐ後ろ(近位)に充填される。回転ノブ1624を回して、外部シースハンドル1610を近位に移動させ、外部シース管腔2010からステントグラフト2020を展開させ始める。使用者は、内部スクリューハンドル1620を回転させながら長手方向に定位に維持するので、外部シース管腔2010は近位に移動する。該工程の態様を図21に示す。チャンネル1626が外部シースハンドル1610の遠位嵌合部1612から完全に分離されると、外部シースハンドル1610は、依然として内部スクリューハンドル1620に対して長手方向に自由に移動ながら、チャンネル(1つまたは複数)1626内に回転するようにロックされる。この時点で、ベアステント2110および第1の密封ステント2120は露出される。チャンネルの固定が起こった後、ステントグラフト2020の近位端は、図21に示されるように外部シース管腔2010から露出される。セットスクリュー(1つまたは複数)をチャンネル(1つまたは複数)1624にロックすると、外部シースハンドル1610は、内部スクリューハンドル1620に関してこれ以上回転せず、ここで、使用者が所望するように、近位に移動し得る。したがって、外部シース管腔2010は、図22に示されるようにステントグラフト2020のボディ部全体が露出されるように収縮され得る。この時点で、外部シースハンドル1610は、内部スクリューハンドル1620を超えて、回転ノブ1624までに位置し、ステントグラフト2020は、頂部クラスプデバイス2210により送達システム1600のみに維持される。頂部クラスプデバイス2210を解放させると、ステントグラフト2020は、送達システム1600から自由になり、その後、送達システム1600は、ステントグラフト2020の埋め込みに衝撃を与えないように患者から取り出され得る。
図16〜23の送達システム1600は、28mm x 150mmのグラフトにより、例えば19.5 French OD編み込み導入器シース内に装填され得る。この配置において、送達システム1600は、グラフトの第1の区画(ベアステント2110および密封ステント2120)を解放するためにスクリュー機構に適用される機械的な利点を利用して、二又のステントグラフト2020を展開し得る。次いで、ねじ1626を分離した後、該デバイスのピンおよびプルアセンブリにより、ステントグラフト2020の残りを展開させ得る。この配置により、医師がねじを能動的に分離する必要が排除される。
図7〜23の2つまたは複数の部分の制御された展開のさらなる代替を、図24〜32に図示する。一般的に、これらの図には、ステントグラフトの制御された正確な展開を補助する「突出スロット(jogged slot)」ハンドルが記載される。上記のように、AAAデバイスの送達システムに使用されるハンドルは、設置の正確性に対してより良い制御を得ることおよび/またはグラフト設置の際にAAAグラフトをよりよく固定させることを必要とする。本発明は、設置の正確さを向上するための「突出スロット」(自動伝達移動装置スロット(すなわち階段式ステップ(stair step)と同様に形作られ得る)を提供する。この例における「突出スロット」は、明細書に援用され、スロット式アルミニウムハンドル体、遠位ハンドルグリップ、近位ハンドルおよび近位クラスプアセンブリを含む、2003年9月3日に出願された米国仮特許出願第60,499/652号および2004年2月23日に出願された米国特許出願第10/784,462号から始まる出願のファミリーに記載されるステントグラフト送達システムの特徴を利用する。しかしながら、発明は、この特定の態様には限定されない。所望の場合、作動ノブは、内部ハイポチューブを固定するために使用される末端キャップと置き換えられ得る。
図24および25に示すように、ハンドル2400の内部機構は、突出スロット2510を有する内部チューブ2500を含み、その中で、ステントグラフト展開の際に、スライダーアセンブリ2600が、ハンドル2500の遠位部(図24に示す)からハンドルの近位部へとスライドし得る。ステントグラフトの展開の際に、突出スロット2510を有するハンドル2400は、ハンドル部が、ステントグラフトの完全な展開に必要な全体の動き未満の特定の程度まで移動することのみを可能にする。スロット2510内の突出(jog)または「Z」2512は、近位ハンドルグリップ2410が、最初に突出2512の周囲を周囲に/横切るように回転される必要なく、末端キャップ2420へと後退する全ての経路を移動すること防ぐ、周辺または横向き部2514を有する。図26および27は、スライダーアセンブリ2600が、例示的な態様において、外部ステントシース2610を収容するために遠位端に係のある付属物(barbed fitting)を有する円筒形のハブであり得ることを示す。スライダーアセンブリ2600の近位端に、支持部材ハイポチューブが通過するOリングがある。スライダーアセンブリ2600は、ハンドルへの外部ステントシース2610のための接着点として、およびシース管腔のフラッシュ(flushing)のための止血ポートとしての両方で働く。スライダーアセンブリ2600の側面からの出口は、ハンドル体2440のスロット2442を通って外側に伸びて、近位ハンドルグリップ2410に取り付けられる「ボス」2700である。フラッシュポートは、このボス2700を通ってフラッシュポートチューブおよび弁2710に取り付けられる。
図28〜30は、スライダーアセンブリ2600の、近位ハンドルグリップ2410への取り付けを図示し、この取り付けにより、送達システム2400の作動および外部ステントシース2610からのステントグラフトの展開が可能になる。スライダーアセンブリ2600に取り付けられる外部ステントシース2610は、ステントグラフトに対して、近位滑り込み(sliding)の動きで収縮される(図28に矢印Aで示す)。より具体的に、この例示的な態様において、遠位ハンドル2430は、近位ハンドルグリップ2410を後方(近位)に移動させて定位に維持され、ステントグラフトを展開する。外部ステントシース2610内の同軸上に配置される内部支持部材(図29および30参照)は、ステントグラフトが、外部ステントシース2610に沿って収縮されることを防ぐプラットフォームまたはアンカーとして機能する。
ハンドル2400の内部チューブ2500は、ステントグラフトの制御された展開(シースを有さない)を可能にするという利点を顕著に提供する。この例示的な態様における内部チューブ2500は、ポリカーボネート材料で作製され、スロットアルミニウムハンドル体2440内を自由に移動し得るような大きさである。スライダーアセンブリ2600は、内部チューブ2500内を自由に移動し得るような大きさである。内部チューブ2500は、ハンドル2400の全長を進む直線のチューブを有する。内部チューブ2500の機械工作された壁(machined through the wall)は、自動車変速機シフトレバー(shifter)のような「突出する」スロット2510である。このように、突出スロット2510は、ステントグラフト展開順序の間の異なる時点のステントグラフトの展開を制御する、いわゆるストッパ2514(または複数のストッパ)を提供する。内部チューブ2500に食い込む突出(1つまたは複数)2512は、スライダーアセンブリ2600が内部チューブ2500の特定の突出部分内を移動することのみを可能にする。外部ステントシース2610のさらなる収縮は、使用者が能動的に、ノブ2420を次の設定に回すことを必要として、スライダーアセンブリ2600のさらなる近位の移動を可能にする。スライダーアセンブリのボス2700は、内部チューブ2500の突出スロット2510およびハンドル体2440のスロット2442を通って伸長する。次いで、ボス2700は、近位ハンドル2410に連結される。内部チューブ2500は、ハンドル2400の遠位端で遠位ハンドル2430に取り付けられる。遠位ハンドル2430の回転により、ハンドル体2440内の内部チューブ2500の回転が可能になる。
図31および32は、種々のストッパ位置の内部チューブ2500の位置を示すための例示的な一態様を示す。インジケーターは、数字/文字を有するビューウィンドウ3200か、または色分けされたドットのいずれかにより表現され得る。システムが送達されるパッケージから、ハンドル2400は、突出スロット2510のロックされた位置(例えば「L」で示される)にあり得る。この方向(orientation)において、臨床医は、パッケージからハンドル2400を取り出し得、取り扱いの際にステントグラフトの不完全な展開を心配することなく、フラッシュ手順を行い得る。臨床医は、デバイスを患者の動脈に挿入する際に、ハンドル2400をロックされた位置/状態に維持し、ステントグラフトの展開の部位を追跡する。停止機構により、ステントグラフトを部分的に展開し得る外部シース2610の不注意な近位の移動のあらゆる可能性が防がれる。
臨床医が展開部位を確認し、ステントグラフトを展開する準備が整うと、例えば停止位置1が得られるまで、遠位ハンドル2430を回転する。デバイスが停止位置1にあると、内部チューブ2500のスロット2510およびハンドル体2440のスロット2442は、一列に並び、近位ハンドル2410が近位にスライドして、ステントグラフトの部分的な展開が可能になる。内部チューブ2500上の次の例示的な突出またはストッパの位置決定は、腎臓上支柱(supra-renal struts)および少なくとも2つのステントグラフトばね(すなわちステント)が外部シース2610から展開されるように設定される。ステントグラフトが部分的に展開され、しかしながら(すなわちベアステントの)腎臓上支柱がクラスプ機構に捕捉されたままの状態で、ステントグラフトは、大動脈内で依然として近位または遠位に動かされ得(maneuvered)、密封部位の位置を確立する。
この時点で、臨床医は、大動脈に対してステントグラフトの位置を維持するために、ハンドル2400を患者に固定し得る。次いで、臨床医は、遠位ハンドル2430を停止位置2に動かし得、例えば、二又のステントグラフトの反対側のレグが外部シース2610から解放されるまで、近位の方向で近位ハンドル2410を動かし続け得る。停止位置2の末端のハンドル2400上のストッパは、例示的な態様において、同側のレグが、外部シース2610から展開することを防ぎ得る。次いで、臨床医は、ステントグラフトの反対側のレグが患者の大動脈の解剖学的構造と直線に並ぶように、該レグを方向付けるためにハンドル2400を回転し得る。ステントグラフトが適切に方向づけられると、臨床医は、遠位クラスプアセンブリを作動して、腎臓上支柱を解放し得る。捕捉された同側のレグは、固定された腎臓上支柱および近位密封に沿って、ガイドワイヤが反対側のレグを横切って、その後反対側のレググラフト配置を設置する間に、固定として機能する。反対側のレググラフトの設置が達成されると、ハンドル2400を停止位置3に動かして、ステントグラフトを十分に解放するように近位ハンドル2410を近位に押す。停止位置の特定の設置/配置は、プロテーゼの大きさおよびプロテーゼが設置される血管の特徴などの種々の要因に基づいて決定される。
図7〜32の複数の段階で制御された展開のさらに別の代替を、図33〜51に例示する。これらの図には、一般的に、制御された正確なステントグラフトの展開を補助する内部リードスクリューハンドルが記載される。上記のように、AAA送達システムを有するステントグラフト設置の際に、AAAグラフトの設置の正確さをより良好に制御することが望ましい。明細書に記載の内部リードスクリューの態様は、操縦者が、ステントグラフトの最初の展開に対してより多くの制御を有することを可能にすることで、設置の正確性を高める。
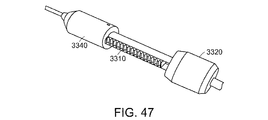
シースからステントグラフトを展開する内部リードスクリューを有する送達システム3300の例示的な態様を、図33から図51までに示す。該送達システム3300は、内部リードスクリュー3310(図34、35、37参照)、リードスクリューナット3320(図35および37参照)、リードスクリューレール3330(図36および37参照)、遠位グリップハンドル3340、フラッシュポートおよび近位端キャップ3350を有する。該配置は、参照により明細書に先に援用された特許ファミリーに記載されるステントグラフト送達システムと同様に、近位端および遠位端クラスプアセンブリにハイポチューブを有する支持部材3360を利用する。リードスクリューナット3320は、外部シース3370からステントグラフトを展開するのとは異なる方法で作動され得る。1つの例示的な作動では、リードスクリューナットをゆっくり回し、内部リードスクリュー3310のねじを使用して、外部シース3370を後方に引く。別の例示的な作動では、リードスクリューナット3320を単純に後ろに引いて、ステントグラフトを展開させる。リードスクリューレール3330内に内部リードスクリュー3310(この例では、一面のみにねじを有する長方形の断面に対して丸いねじスクリューの外部が切断された材料で形成される、すなわち部分リードスクリュー)を収容することにより、該システムは、常に最初の例示作動プロセスを使用する必要が回避され得る。
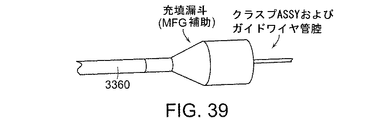
支持部材3360は、送達システム3300内に同軸上に含まれる。支持部材3360は、近位端でハンドル3300の近位端キャップ3350に取り付けられる。支持部材3360は、内部リードスクリュー3310、フラッシュポートおよび外部シース3370を通って、同軸上に移動する。支持部材3360の遠位端は、ステントグラフトの近位(尾側)端を維持する捕捉ポッドである。ガイドワイヤ管腔および遠位クラスプアセンブリチューブ(図39)は、送達システム3300の全長に沿って支持部材3360内に同軸上に移動する。クリンピングしたステントグラフトおよび遠位クラスプアセンブリは、外部シース3370の遠位端に含まれ得る。遠位クラスプアセンブリは、図41に示される可撓性の先端4100を有する遠位端で終結する。
この例示態様に使用されるリードスクリュー3310(図33)は、リードスクリューナットの一回転当たり、0.400インチの直線リードを有する1インチの直径のリードスクリューで形成され得る。内部リードスクリュー3310は、約14cmの長さであり、ねじの大部分が周辺からのカットアウェイ(cutaway)であるように機械加工される。内部リードスクリュー3310の機械加工を行なうことにより、内部リードスクリュー3310がリードスクリューレール3330に適合することが可能になり、リードスクリューレール3330が内部リードスクリュー3310とリードスクリューナット3320の間に適合することが可能になる。リードスクリューレール3330は、部分的な内部リードスクリュー3310上で、リードスクリューナット3320を中心に置くように働く。リードスクリューレール3330の直径は、リードスクリューナット3320の短径とほぼ等しい。リードスクリューレール3330をこの配置におくことにより、内部リードスクリュー3310は、リードスクリューレール3330の溝3530内をスライドし得る(図35)。
内部スクリュー3310の遠位端にフラッシュポートが取り付けられる(図38)。フラッシュポートの近位端に、支持部材ハイポチューブの周囲を密封するOリングが含まれる。フラッシュポートの遠位端は、外部シース3370に取り付けられるニップルである。
デバイス3300の組み立ての際に(部分的に、図39〜41に示される)、ステントグラフトは最初に、遠位クラスプアセンブリおよびガイドワイヤ管腔に沿って、外部シース3370に挿入される。次いで、遠位先端4100は、遠位クラスプアセンブリ上にねじが入れられる。図42および43に示されるように、組み立て前の支持部材3360を、次いで外部シース3370に挿入する。次いで、支持部材3360は、フラッシュポートおよび内部リードスクリュー3310を通って誘導される。次いで、外部シース3370は、フラッシュポートに取り付けられ、クランプされる(図38参照)。図44に示されるように、ハンドル体は、最初に遠位ハンドルグリップ3340をリードスクリューレール3330に取り付けることにより組み立てられる。次いで、図45〜46に示されるように、外部シース3370/フラッシュポート/内部リードスクリュー3310の部分組立品は、遠位ハンドルグリップ3340の前面の開口を通ってねじが入れられ、内部リードスクリュー3310は、リードスクリューレール3330の溝3430に設置される。図47〜48には、リードスクリューナット3320が、リードスクリューレール3330を超えて、内部リードスクリュー3310と噛み合うことが示される。遠位ハンドルグリップ3340と接触するまで、外部シース3370を前方に動かし、リードスクリューナット3320は前方にねじが入れられる。図49〜51に図示されるように、次いで、近位端キャップ3350は、支持部材3360上に配置され、リードスクリューレール3330に取り付けられる。支持部材3360を近位端キャップ3350に固定し、遠位クラスプ機構ハードウェアをインストールする。
使用において、臨床医はまず、食塩水をフラッシュポートに流してシステム3300をフラッシュする。食塩水は、外部シース3370と支持部材3360の間の環状の空間に充填され、クリンプされたステントグラフトを通って透過し、外部シース3370と可撓性先端4100の間から排出される。フラッシュポート内のOリングは、支持部材3360のハイポチューブを密封し、送達システム3300からの漏れを防ぐ。次いで、臨床医は、内在するガイドワイヤを越えて送達システム3300を送り込み、該デバイスをステントグラフト展開部位までたどらせる。
この時点で、臨床医は、リードスクリューナット3320を回転させてステントグラフトゆっくり解放するか、またはリードスクリューナット3320を後方に引いてステントグラフトを迅速に解放させるかのいずれかの選択肢を有し、それによりリードスクリュー3310をレール3330まで下方にスライドさせる。ステントグラフトの展開におけるいくつかの点で、解放を停止して遠位クラスプアセンブリを作動させ、ステントグラフトの誘導支柱(leading struts)(ベアステント)を解放し得る。ステントグラフトは通常、外部シース3370内で強く束縛されるので、AAAデバイスによる展開の力は、かなり高くなり得る。
発明の内部リードスクリューは、スクリューシステムを一体化して、直線状の力をねじれの力に転換する利点を有する。ステントグラフトを展開させるために臨床医がリードスクリューナットに作用させなければならないねじれの力は、人間工学的に、直線的に引く力よりも困難ではない。該スクリューナットを用いて得られる機械的な利点に加えて、スクリュー型の機構により、ステントグラフトの解放においてより高い制御が可能になる。直線のピンおよびプルシステムにおいて、ステントグラフトを展開させるための最も大きな力は、ステントグラフトとシースの間の摩擦の最初の解放における力である。最初の摩擦が解消されるとすぐに、展開の力は迅速に低下する。人間工学的な観点から、臨床医が、摩擦力が解消された瞬間に、展開の制御および速度を維持することは非常に困難である。この制御の消失のために、ステントグラフトにシースを付けないことは、所望されたものよりも非常に一般的である。本例示態様によるスクリュー型の機構により、臨床医が、ステント設置の正確さのための重要な因子であるステントグラフトのこの最初の解放に対して多くの制御を有することが可能になる。
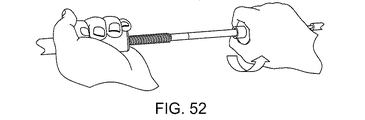
図52〜54には、先の図面のリードスクリュー態様に対する改良が図示される。上述の態様において、使用者は、一方の手でハンドルノブを掴んで回転させ、もう一方の手でシースハンドルグリップを維持することが必要であった。図52参照。このハンドルの作動には、ステントグラフトの展開のために、使用者が、2つの動作を一度に行うことに集中する必要があった。また、整列の誤りによりステントグラフト設置の正確性を低減し得るように、シースハブとの整列から外れたハイポチューブ/内部部材が回転する可能性があった。そのため、第2のハンドル5300を、回転ノブ5310の後ろ(近位)に付加した(図53および54)。ハンドル5300は、内部部材5360(ハイポチューブ)に固定されるベアリング嵌合に取り付ける。使用者は、第2のハンドル5300を掴み、親指と人差し指でリードスクリューノブを回転させる。ここで、使用者の手は、ノブが回転されてシースハンドルがリードスクリューに対して後方に収縮されるように、1か所に押さえつけられる。
図55A〜57は、本発明の送達システムの別の例示的な態様を図示する。送達システム5500のこの例は、ピンおよびプル入れ子式システム100、700、1600、2400およびシステム3300の特徴を含む。送達システム5500は、内部リードスクリュー5510、リードスクリューナット5520、中空遠位グリップハンドル(明細書において「遠位グリップ」ともいう)5530、および中空内部体5540(明細書において「ハンドル体」ともいう)を有する。内部リードスクリュー(明細書において「内部リードスクリューアセンブリ」ともいう)5510は、中空内部体5540の溝5542内にのる。リードスクリューナット5520は、中空内部体5540の周囲に回転させた場合、内部リードスクリュー5510の長手方向の移動を引き起こすために、上部ねじ部(明細書において「ねじ部」ともいう)5512に対応するピッチを有する、図示されない内部ねじを有する。したがって、リードスクリューナット5520は、中空内部体5540の周囲に回転するように自由にマウントされる。また、リードスクリューナット5520は、中空内部体(明細書において「ハンドル体」ともいう)5540の周囲に、縦方向に自由にマウントされる。この配置において、臨床医は、内部リードスクリュー5510の任意の所望の回転について、リードスクリューナット5520を回転させる能力を有する。かかる回転の前、最中または後の任意の時点で、臨床医は、リードスクリューナット5520の近位の移動と同じ速度で、内部リードスクリュー5510をリードスクリューナット5520に沿わせて、リードスクリューナット5520を長手方向に近位に移動させ得る。内部リードスクリュー5510は、中空遠位グリップハンドル5530および中空内部体5540から長手方向に自由な外部シース5550に対して、長手方向に固定される。この様式で、リードスクリューナット5520の回転により、外部シース5550は(ねじ部5512のねじのピッチに応じて)比較的ゆっくり移動し、リードスクリューナット5520の長手方向の移動により、外部シース5550は比較的速く移動する。
図55Aと56の違いは、内部リードスクリュー5510、中空遠位グリップハンドル5530、中空内部体5540および外部シース5550の、リードスクリューナット5520を最も近位の位置に対して近位(周囲)に移動させた後の相対的な位置を図示する。図55Aにおいて、外部シース5550は、押し棒5560の周囲にあり、図示されないステントグラフトが埋め込み前に収納(圧縮)される外部シース5550内の空洞を完全に覆う。外部シース5550は、ノーズコーン5570に接触し、ステントグラフトを信頼性のあるようにその中で固定するための密封をそれらの間に形成するように全体にわたって伸長する。図56中、比較において、外部シース5550はノーズコーン5560から完全に収縮されて、押し棒5560の遠位端に意図されるボス7000が表れることが見出され得る。ステントグラフトのベアステント(例えば2310)を取り外し可能に固定するための頂部捕捉アセンブリ5568を、ノーズコーン5570および頂部捕捉アセンブリ5568の閉じられた(固定された)位置のすぐ近位に示す。頂部解放デバイス5580の作動により、近位頂部捕捉部5572(ベアステント捕捉歯により)に連結される内部管腔5590が近位に移動され、ベアステントの個々の近位頂部が抜け出得る空間が作製される。
図55Aに示される中空遠位グリップハンドル5530の内部に配置されるデバイス全体が、図56に示されないことに注意。このデバイス、スライダー5700は図57Aにおいて拡大して詳細に示される。遠位から近位へと、外部シース5550は、シースクリップ5702により、スライダーキャップ5710の遠位ニップルに固定される。スライダーキャップ5710は、スライダーキャップ5710の内部チャンバーをフラッシュバルブ開口部5712の外部の環境に流体的に連結するチェック弁またはフラッシュ弁(明細書において「フラッシュ弁開口部」ともいう)5712を有する。中間スライダーアセンブリ(明細書において「スライダー体」ともいう)5720は、その間にあるOリング5730により、スライドキャップ5710に固定されて、互いに流体的に連結され、かつ2つの部分のスライダーキャップ5710およびスライダー体アセンブリ5720の外側の環境から流体的に密封されるそれぞれの内部チャンバーを維持する。
解放部5514(例えば親指スクリュー)は、スライダー体アセンブリ5720のブラインドホール5722の内部に設置される場合、中空遠位グリップハンドル5530および中空内部体5540の内部のスライダー5700を、取り外し可能に固定する。解放部5514を取り外す/作動させると、外部シース5550(明細書において「シース」ともいう)以外の図56に図示される部分の全ては、スライダー5700から取り外され得、該外部シースは、支持部材5740、頂部解放デバイス5580およびノーズコーン5570を有する遠位区分全体を含む。
上記送達システムとして、支持部材5740は、スライダー体アセンブリ5720の全体および頂部解放デバイス5580までの全体を通過する。この支持部材5740は、部材の外部に血流が流れないように、スライダー5700に密封される必要がある。この密封に影響するように、スライダー体アセンブリ5720の空洞の内部にワイパーガスケット密封(明細書において「ワイパー弁」ともいう)5750が施される。該密封は、x弁5760の使用により増強される。
発明の頂部捕捉デバイスアセンブリは、図128に示されるように、発明のレグクラスプと合わせて使用され得る。管腔8613および伸長部材8614は、レグクラスプ12810を通って頂部捕捉送達デバイスアセンブリ12802から伸長する。二又のステントグラフト12803は、頂部捕捉デバイス12804からレグクラスプ12810まで伸長し、上述のように頂部捕捉デバイス12804およびレグクラスプ12810のそれぞれで、さらに上述のように、発明の方法による解放のために固定される。
一態様において、発明は、(1)ノーズおよび該ノーズから遠位に伸長する複数の歯を含む近位頂部捕捉部、ここで該ノーズは、近位捕捉部の主軸と実質的に並行な少なくとも1つの放射抑制(radial restraint)を画定し、該歯は、最も近位の放射抑制に対して放射状の主軸の周囲に放射状に分布され、かつ該主軸に実質的に並行である、 (2)主軸の周囲に放射状に分布するスロットを画定する遠位頂部捕捉部、該スロットは、該主軸に沿って該近位および遠位頂部捕捉部の相対的な移動により歯(time)と噛み合い得る、(3)ノーズと遠位頂部捕捉部の間にある主軸から放射状に伸長し、かつスロットと噛み合う関係において、歯の移動に干渉しない関係の主軸に沿って、スロットと直線に並ぶ複数のボス、(4)遠位頂部捕捉部が固定される伸長部材8614(そうでなければ内部制御チューブとして知られる)、該伸長部材は、近位頂部捕捉部および複数のボスを通って伸長する、(5)近位頂部捕捉部が固定され、伸長部材が伸長する管腔8613(そうでなければ外部制御チューブと称される)、ここで、該管腔の移動により、歯がスロットと噛み合い、かつボスの上にある第1の位置と、歯がスロットと噛み合わず、かつボスの上にない第2の位置との間の主軸に沿った近位頂部の移動が生じる、(6)頂部により連結された支柱を含むベアステント、該支柱は歯の間に伸長し、歯がスロットと噛み合う場合、頂部の一部はボスと遠位頂部捕捉部の間に伸長する、ならびに(7)ステントから放射抑制内に伸長する少なくとも1つの腎臓上バーブを含む、頂部捕捉デバイスアセンブリ;ならびに伸長部および管腔が伸長するレグクラスプ、該レグクラスプは、(1)バレル、(2)該バレルの主軸に沿って該バレルから伸長するスプール、および(3)該スプールの末端のリム、該リムは、スプールの直径より大いがバレルの直径より小さい直径を有する、を含むステントグラフト送達デバイスである。
別の態様において、発明は、x弁および該x弁を支持するガスケットを含むx弁アセンブリである。該ガスケットは、周辺支持体および該周辺支持体から内側に伸長する少なくとも1つのアームを含む。一態様において、該ガスケットは、交差主軸に沿って、少なくとも2組のアームを含む。一態様において、アームのそれぞれの組は、直線に整列される。x弁アセンブリの少なくとも2つの軸は、互いに直角である。x弁アセンブリ中のアームの組は、平面上にあり得る。該x弁アセンブリのガスケットは、ニチノールを含み得る超弾性金属を含み得る。
x弁アセンブリ5760は、図57Bにおいてより詳細に見られ得る。ここに示すように、x弁アセンブリ5760は、ガスケット支持体5762および弁5764を含む。ガスケット支持体5762は、図57Cに別々に示される。ガスケット支持体5762は典型的に、ニッケルチタン(すなわちニチノール)などの超弾性金属を含む。x弁5764を図57Dに別々に示す。弁5764は典型的に、シリコーンで形成される。x弁アセンブリ5760スライダーアセンブリ5720の部分的に分解した図を図57Eに示す。スライダーアセンブリ5720中のx弁アセンブリ5760の部分的に分解された図の別の透視図を図57Fに示す。図57Eおよび57Fに示されるスライダーアセンブリ5720構成要素は、スライダー体5766およびガスケットスペーサー5768を含む。該スライダー体およびガスケットスペーサーは典型的に、ポリエーテルエーテルケトン(PEEK)で形成される。この配置により、支持部材5740が図57Aに示されるようにスライダー5700内にある場合、スライダー5700の外側の血流は、支持部材5740の近位端が密封される場合、実質的に遮られる。そのため、フラッシュ弁開口部5712は、血液が該支持部材5740の周囲にある場合にのみ(but only)血流を生じさせるための唯一の方法である。
上述のように、支持部材5740は、スライダー5700から取り出され得る。ワイパー弁シール5750およびx弁5760はいくつかまたは更なる実質的な密封能力の基準を形成するが、血液の密封が確実にされる必要がある。したがって、密封アセンブリは、スライダー5700の近位端に提供され、密封アセンブリは、一例示的態様において、シース弁5770、シース弁洗浄機5780およびシース弁ノブ5790で構成される。以下の文章に記載されるように、シース弁洗浄機5780は必ずではないが、本態様に含まれる。ここでシース弁5770は、シリコーンの円筒形の断片として形成されるが、スライドアセンブリ5720の内側に圧縮される場合にスライドアセンブリ5720のブラインドホール5722の内側に血液密封を形成する限り、任意の形状または材料を取り得る。図57Aに示される配置によると、シース弁ノブ5790は、ねじを有するスライドアセンブリ(明細書において「スライダー体」ともいう)5720の近位端に連結されるので、スライドアセンブリ5720に関して回転する場合、ノブ5790は、その中に入るかまたはそこから取り出される。したがって、内部の集合物を取り出した後、ノーズコーンがスライドアセンブリ5720から引き抜かれる場合、適切な回転により、ノブ5790は、シース弁洗浄機5780を、シース弁5770に対して内側に押して、シース弁5770を圧縮し、支持部材5740および内部集合体の全てを取り出した後に残った穴を密封する。シース弁5770の特定の態様において、シース弁の中間部の外径上の環状の溝5772は、シース弁5770の自己密封折り畳みを促進する。より大きな抵抗を有するノブ5790を回転する必要がある場合に使用者が経験する緊張のために、より速い折り畳みが望ましい。溝5772は、必要な力および必要なノブの回転数を有意に低減する。
図58〜60は、本発明の送達システムのノーズコーンの例示態様を図示する。
送達システム100、700、1600、2400、3300、5500のための受動的な止血弁は、図57のシステム5700中のシース弁5770を置き換える。2つの構成要素により止血は維持され得る。第1に、ガイドワイヤ上の密封は、「アヒルのくちばし」型の弁によりなされ得る。アヒルのくちばしは、例えば、2つのばね負荷ローラーによるなどして、密封を確実にするための機械的補助を有し得る。第2のデバイスのシース上の密封は、シースが受容する、シースよりわずかに小さい穴を有するゴムディスクにより維持される。この構成要素は、主要なシステムについての止血も維持する。
図65〜69は、発明のレグ伸長送達システムの例示態様を図示する(例えば図55A〜57に示される主要または二又の送達システムと比較して。これらの図に示される寸法は、態様としてのみに取られるのではなく、発明の例示のみとして取られるべきである。
上記の送達システム100、700、1600、2400、3300、5500はそれぞれ、外部シース管腔内に挿入されるステントグラフトを必要とし、それぞれは、ステントグラフトに対して外部シースが収縮される場合、ステントグラフトがシース管腔内に非常に離れて挿入されることを防ぎ、長手方向に固定されるステントグラフトを維持する内部デバイスを有する。二又のステントグラフトを埋め込む場合、同側のレグの最後の2つのばね(例えばステント)が、展開の際に外部シースから不完全に解放されないことを確実にすることが望ましい。図70A、70Bおよび70Cに示される発明により、反対側のレグをカニューレ挿入しながら、ステントグラフトの同側のレグの捕捉が可能になる。かかる配置により、反対側のレグのカニューレ挿入時のステントグラフトの安定性が確実になる。
図70A、70Bおよび70Cに示される発明のさらなる態様は、例として、バレル7002、該バレル7002の主軸に沿って該バレル7002から伸長するスプール7004、および該スプール7004の末端のリム7006を含むレグクラスプ7001であり、該リム7006は、図70A、70Bおよび70Cに示されるように、スプール7004の直径より大きいが、バレル7002の直径より小さい直径を有する。
発明のレグクラスプ7001は、少なくとも部分的に、ステンレス鋼、ポリエステル、ポリエーテルエーテルケトン(PEEK)およびアクリロニトリルブタジエンスチレン(ABS)からなる群より選択される少なくとも1つの構成要素で形成され得る。発明のレグクラスプ7001のリム7006は、図125および126に示されるように、放射状に伸長するスポーク12502を含み得る。
さらに別の態様において、発明は、バレル7002、該バレル7002の主軸に沿ってバレル7002から伸長するスプール7004および該スプール7004の末端のリム7006を含むレグクラスプ7001、該リム7006は、スプール7004の直径より大きいが、バレル7002の直径よりも小さい直径を有する;該バレル7002に固定され、スプール7004の反対側の方向でバレル7002から伸長する支持チューブ7010;ならびにバレルの直径に対する内径を有し、それによりスプール7004およびリム7006を覆う第1の位置と、スプール7004およびリム7006を露出する第2の位置との間の移動を可能にするシース7030(図70Aおよび70C)を含むステントグラフト送達システムである。支持チューブ7010はまた、図57Bにおいて支持チューブ5744としても表され、代替的な態様において、図57Bに示される支持部材5740のいくつかの他の構成要素、例えば図57Aにおいても示されるハイポチューブ5742は、バレル7002に固定され得ること、および支持チューブ7010は、図56に示される中空内部体5540に直接固定され得ることが理解される。
発明のステントグラフト送達システムはさらに、ステントグラフト7020を含み得、ここで該ステントグラフトのステント7024は、外部シース7030が第1の位置にある場合、リム7006と干渉する関係にあるスプール7004の周囲に伸長し、ステントが固定される管腔グラフト7032は、リムとシースの間から伸長し、ここで、第1の位置から第2の位置へのシースの移動により、レグクラスプからステントグラフトが解放される。
特に、ぎざぎざの付いたボス7000は押し棒(明細書において「支持部材」ともいう)7010の遠位端に配置され、ステントグラフト7020が外部シース7030から非常に離れて挿入されることを防ぎ、外部シース7030がステントグラフト020に対し収縮される場合、ステントグラフト7020が長手方向に固定されることを維持する。ぎざぎざがついたボス7000は、近位フランジ(明細書において「バレル」ともいう)7002、中間スパン(明細書において「スプール」ともいう) 7004、および遠位フランジ(明細書において「リム」ともいう)7006を有する。近位および遠位のフランジ7002、7006の外径は、中間スパン7004の外径よりも大きく、それらの間に環状の空洞7008を形成する。環状の空洞7008内に最も遠位のステント7024を有するように十分に離れてステントグラフトレグ7022を遠位フランジ7006上に配置した場合、ぎざぎざの付いたボス7000は、レグ7022と外部シース7030の間に締まりばめを形成する。外部シースが完全に収縮されると、締りばめは消える。最後のステント7024の固定は、外部シース7030が収縮した後に固定が消えるという事実により、受動的であるといえる。この配置を使用して、外部シース7030が収縮した場合(図70Aの左まで)、ステントグラフトの長手方向の移動を防ぐことにより、ステントグラフト7020をより良好に制御および掴むことができる。
以下のセクションには、ステントグラフト、特に腎臓大動脈の橋渡しをすることが意図された二又のAAAステントグラフトに対する向上が記載される。図72A、72B、72C〜図83に示されるように、ステントグラフトシステム、例えば二又のステントグラフトシステム7200は、管腔グラフト構成要素7201;支柱7211を連結する近位7212および遠位7213頂部でつながれた複数の支柱7211を含むベアステント構成要素7210、該ベアステント構成要素7210は、該管腔グラフト構成要素7201の近位端7214に固定され、該近位端7214から近位に伸長する;ベアステント構成要素7210の近位にある腎臓下ステント構成要素7215、ここで該腎臓下ステント構成要素7215は、ベアステント構成要素7210に対して遠位にあり、管腔グラフト構成要素7201に固定されたベアステント構成要素7210の頂部7213により画定された周囲線に広がる;ベアステント構成要素7210の少なくとも1つの腎臓上部7217から遠位に伸長する少なくとも1つの腎臓上バーブ7220;およびベアステント7210の少なくとも1つの腎臓下部7218から遠位に伸長する少なくとも1つの腎臓下バーブ7230を含む。
明細書で使用する場合、バーブについて参照される「腎臓上」は、最も上の腎臓動脈の口の頭側の動脈に取り付けられるバーブを意味する。
明細書で使用する場合、バーブについて参照される「腎臓下」は、最も下の腎臓動脈の口の尾側の動脈に取り付けられるバーブを意味する。
別の態様において、腎臓下バーブは最初に覆われるバーブであり得る。ベアステントは、「覆われない」または「部分的に」覆われるステントともいう。
「バーブ」は、明細書において「フック」ともいう。
図73に示されるように、発明のステントグラフトシステムにおいて、ベアステント7210の腎臓上部は、支柱7211の間にブリッジ7219を含み得、2つの支柱7211を連結するアイレット7221を画定し、ここで腎臓上バーブ7220は、ブリッジ7219から伸長する。
発明のステントグラフトシステムの腎臓下バーブ7230は、2つの支柱7211を連結する遠位頂部7213から伸長する。
発明のステントグラフトシステムの腎臓上バーブと腎臓下バーブの最も近位の点の間の例示的な距離は、約6mm〜約40mm(例えば、6mm、10mm、15mm、20mm、25mm、30mm、35mm、40mm)の範囲である。
発明のステントグラフトシステムの少なくとも1つのステントは、ニッケルチタンなどの超弾性金属を含み得る。
一態様において、発明のステントグラフトシステムのベアステントの遠位頂部は、管腔グラフト構成要素内に固定され、ここで腎臓下バーブは、管腔を通って、ベアステントから伸長する。発明の少なくとも1つの腎臓下ステントは、管腔グラフト構成要素内に固定され得る。
図105Cに示される、発明の別の態様は、管腔グラフト構成要素10560;近位10590および遠位10591頂部により連結され、該管腔グラフト構成要素10560の近位端10592から伸長する角度がついた支柱10580のベアステント10570;該ベアステント10570に隣接し、かつ管腔グラフト10560内にある近位ステント10593、該近位ステント10593は、ベアステント10570と入れ子になった近位頂部10590および任意に遠位頂部10591により連結された角度がついた支柱10580を含む;ならびに該管腔グラフト構成要素10560を通って遠位頂部10591から遠位に伸長する少なくとも1つのバーブ10594を含むステントグラフトシステム10550である。
図71は、腎臓動脈7120と腸管動脈7130の間の、動脈瘤7110を有する腹部大動脈7100を模式的に図示する。-腹部大動脈7100の分枝はその下流の末端で骨盤および足まで血液を運搬する左右の総腸骨動脈7130になる。図72A、72Bおよび72Cは、腎臓動脈7120の直下から腸管動脈7130に向かって伸長するグラフト部を有し、2つの小さな管腔に分離し、その一つが腸管動脈7130に伸長し、もう一方が他の腸管動脈7130の前で終結する、二又のステントグラフトシステム7200などのステントグラフトシステムを模式的に図示する。この二又のステントグラフト7200のベアステント7210は、腎臓上バーブ7220および腎臓下7230バーブの両方によって形づくられる。
図72Bに示される別の態様において、発明は、管腔グラフト構成要素7201;二又の管腔グラフト構成要素などの管腔グラフト構成要素7201の近位端7214から伸長するベアステント7210;ベアステント7210の近位端7217から遠位に伸長する少なくとも1つの近位バーブ7220;およびベアステント7210の腎臓下部7218から遠位に伸長する少なくとも1つの遠位バーブ7230を含み、管腔グラフト構成要素の主軸に沿った近位7220および遠位7230バーブの間の距離aが、約6mm〜約40mm(例えば6mm、10mm、15mm、20mm、25mm、30mm、35mm、40mm)の範囲であるステントグラフトシステム7200である。
発明のステントグラフトシステムにおいて、バーブの少なくとも一部は、約20°〜約60°(例えば20°、25°、30°、35°、40°、45°、50°、55°、60°)の範囲の角度でベアステントから伸長する。
発明のステントグラフトシステムのベアステントは、少なくとも部分的に超弾性金属で形成され得る。
図78および79に示されるように、発明のステントグラフトシステムは、少なくとも1つの放射線不透過性マーカー7800をさらに含み得る。発明のステントグラフトシステムには、少なくとも1つの放射線不透過性マーカーが、ステントまたはグラフト材料のいずれかに取り付けられ、発明のステントグラフト送達システムを使用することにより、例えば腹部大動脈瘤を治療する方法において、患者内のステントグラフトの設置を補助し得る。
図73〜75は、発明のAAAステントグラフトシステムの例示態様による、フックまたはバーブ7212を有する腎臓上ベアステント7210の種々の特徴を図示する。6頂部型が示されるが、より多いまたはより少ない頂部を使用することができる。図74に示されるように、このベアステント7220、7230は、グラフトの端からの距離に基づいて、例えば長さを増加する種々の長さのフック7410、7420、7430を有する(当然のことながら、これらの長さは、この方向において低下し得るかまたは長さの組合せであり得る)。一態様において、角度がついたネックにおいて、フックはさらにグラフトラインから離れて、大動脈壁からさらに離れやすくなるので、フック7410、7420、7430は、グラフトのへりからさらに離れて、長さを増加する(すなわち、B-1は、B-2より長く、B-3より長い)。さらに、腎臓動脈により近い、より短いフックが患者には安全である。
図75は、フック7510、7520、7530が、グラフトのへりからさらに離れて距離を増加し、グラフトへりからの距離で種々の周辺の面に沿ったジグザグ(staggered)な位置で配置される方向を示す。
図73〜75および77は、ベアステントのグラフト末端(遠位)でのそれぞれの頂部でのアイレット7700を図示する。この特徴は、ステントをグラフト材料に縫合することを補助する。アイレットの利点は、通常の縫い付け後処理段階の際に、ステントの領域に圧力または荷重がかからないように縫合することを含む。典型的に、ステントは、ステントの洞様血管の内弧面の周囲に縫い付けられる。この領域は、クランピング/荷重および最終的な展開などの縫い付け後処理段階の間に、弾性の変形に供される。かかる移動は、縫合に対して有害な影響のみを有し得る。さらに体内での通常の解剖学的移動の間に、ステントの内弧面は最も大きな移動を有する。これらの図面に示すようなアイレットは、プロテーゼ全体の一般的な動きを超える何らかの移動または弾性の変形に供されない。何らかの圧力または荷重に供されないステントの領域での縫合は、遠近感(perspective)の製造に有利である。縫い付け処理の間に、針が、ステント内に小さな穴を開け得、この穴は、最初の裂け目およびその後の割れの焦点となり得る。これらの穴は、アイレット7700などの定位の領域においてよりも、内弧面においてより大きな関心となる。発明の腎臓上ステントは、埋め込み後に割れに供されるはずであり、ステントの内弧面領域は、割れが起こるスポットになりやすい。縫合がこのスポット中でなされる場合、割れにより、グラフトからの腎臓上ステントの完全な分離が生じ得る。この付加されたアイレットの特徴で縫い付けることにより、割れたステントが依然として、割れの後のグラフトに取り付けられた2つの支柱の1つを有する。したがって、いったん割れが生じると、2番目の支柱が同じ場所で、共有する内弧面から壊れて離れる可能性もかなり低くなる。ステントの縫合固定領域として示される下部アイレットを有することは、かなりの利点を有する。
発明のステントは、約20mm〜約36mmのサイズであり得、例えば20mm、22mm、24mm、26mm、28mm、30mm、33mmおよび36mmが挙げられ得る。
ステントは、例えば、3mm ODチューブから切断され得る。その幅は、3mmのチューブの円周と同等であり得る(しかし同等である必要はない)。チューブ壁は、例えば0.017インチであり得る。図81〜85には、かかるチューブから製造される場合のステントについて、例示的な寸法により発明に従った、側面フックを有するレーザーカット腎臓上ステントの1つの例示態様が図示される。この例示態様は、6個の上方頂部および6個の下方頂部を含むが、変形物は、それ以上または以下を有し得る。支柱厚さは、約0.016インチ〜0.018インチの直径のワイヤを模倣することを目的とし得る。しかし、異なる直径であり得、例えば壁の厚さは0.017インチであり得る。
バーブは、面から曲げられ得、仕上げ工程の一部として、鋭くなり得る。バーブの全て、または該バーブの部分集合のみが、発明のステントに含まれてもよい。
上述のベアステントは、発明の送達システムと共に使用され、該システムは遠位頂部捕捉デバイスを含み、その例を図69に示す。しかしながら、バーブを追加すると、ステントアーム8010(すなわち頂部間の長さ)のそれぞれの間に予め存在する空間は、ここでバーブにより巻き取られる。このことは特に、図80および84に見られ得る。したがって、以前に使用された頂部捕捉デバイスは、アーム8010の間の「空間」の消失の原因となるように変形される。
一態様において、発明は、ノーズ8601を含む近位頂部捕捉部8600a、ここで該ノーズは、8011として図86Cおよび88に示されるパイロット穴などの少なくとも1つの放射状拘束を画定し、該放射状拘束手段は、近位捕捉部8600aおよびノーズ8601から遠位に伸長する複数の歯8602の主軸に対して実質的に並行であり、該歯8602は、最も近位の放射状拘束に対して放射状にある主軸の周囲に放射状に分布され、該主軸に対して実質的に並行である;該主軸の周囲に放射状に分布されるスロット8611を画定する遠位頂部捕捉部8610、該スロット8611は、近位8600aおよび遠位8610頂部捕捉部の主軸に沿った相対的な移動により歯8602と嵌合し得る;ノーズ8601と遠位頂部捕捉部8610の間の主軸から放射状に伸長し、歯8602の動きと干渉しない関係にある主軸に沿ってスロット8611と直線に並び、スロット8611と嵌合する関係にある複数のボス8612;遠位頂部捕捉部8610が固定される、図86Dに示される伸長部材8614(内部制御チューブとしても知られる)、該伸長部材8614は、複数のボス8612および近位頂部捕捉部8600aを通って伸長する;ならびに近位頂部捕捉部8600aが固定され、伸長部材を通って伸長する、図86Dにも示される管腔8613(外部制御チューブともいう)、ここで、管腔8613の移動により、歯8602がスロット8611と嵌合し、ボス8612の上にある第1の位置と、歯8602がスロットと嵌合せずにボス8612の上にない第2の位置の間の主軸に沿った、近位頂部捕捉部8600aの移動が生じる、を含む頂部捕捉デバイス8600である。
明細書で使用する場合「放射状拘束」は、送達システムの主軸または頂部捕捉デバイスに対して垂直方向の制限された移動を意味し、それにより、例えば、ステントのバーブは、頂部捕捉デバイスの歯の間で解放され得る。
明細書で使用される場合「干渉しない関係(non-interfering relation)」は、1つの対象が別の対象に対して移動可能であることを意味する。
発明の頂部捕捉デバイスのノーズ8601は、歯8602の間に溝8603を画定し得、該溝8603は、ボス8612の間の空間と直線に並ぶ。
一態様において、発明の頂部捕捉デバイスの複数のボス8612は、遠位頂部捕捉部8610に対して固定される。
発明の頂部捕捉デバイスのノーズ、伸長部材およびそれぞれの歯8602は、空間を画定し得る。
別の態様において、発明は、頂部捕捉デバイスの近位頂部捕捉部が固定される管腔を移動させる工程を含むステントグラフトのベアステントを解放する方法であって、該近位頂部捕捉部は、近位頂部捕捉部の歯が、遠位頂部捕捉部のスロットと噛み合い、頂部捕捉デバイスの主軸から放射状に伸長するボスの上にある第1の位置と、歯が該スロットとは噛み合わず、該ボスの上にない第2の位置の間の主軸に沿って、放射状拘束を画定し、それにより、歯、ボスおよび遠位頂部捕捉部により画定される空間からベアステントの頂部を解放させる方法である。
一態様において、ステントグラフトのベアステントを解放する方法に使用される頂部捕捉デバイスは、遠位頂部捕捉部が固定される伸長部材をさらに含み得、該伸長部材は、近位頂部捕捉部および複数のボスを通って伸長する。
別の態様において、発明の方法に使用される頂部捕捉デバイスは、近位頂部捕捉部が固定され、それを通って伸長部材が伸長し、かつそれによって近位頂部捕捉部が移動する管腔をさらに含み得る。
さらに別の態様において、発明は、ノーズ7615を含む近位頂部捕捉部7610、ここで該ノーズは、例えば図76Aに示されるようにノーズ7610から遠位に伸長すると前記され、近位捕捉部および複数の歯の主軸に対して実質的に並行であると前記された、パイロット穴などの少なくとも1つの放射拘束を画定し、該歯は、最も近位の放射拘束に対して放射状の主軸の周囲に放射状に分布され、該主軸に対して実質的に並行である;該主軸の周囲に放射状に分布されるスロットを画定する、例えば図76Aに示される遠位頂部捕捉部7620、該スロットは、該主軸に沿った近位および遠位頂部捕捉部の相対的な移動により歯(time)と嵌合し得る;ノーズと遠位頂部捕捉部の間の主軸から放射状に伸長し、歯の移動とは干渉しない関係にありスロットと嵌合する関係にある主軸に沿って、スロットと直線にある複数のボス;遠位頂部捕捉部が固定される伸長部材、該伸長部材は、近位頂部捕捉部7610および複数のボスを通って伸長する;近位頂部捕捉部7610が固定され、伸長部材が伸長する管腔、ここで、該管腔の移動により、歯がスロットと嵌合し、ボスの上にある第1の位置と、歯がスロットと嵌合せず、ボスの上にない第2の位置の間の、主軸に沿った近位頂部の移動が生じる;頂部により連結された支柱7631を含むベアステント7630、該支柱は、歯8602(図86B)の間に伸長し、該頂部の一部は、歯がスロットと嵌合する場合に、ボスと、遠位頂部捕捉部の間に伸長する;およびステントのアイレットから放射拘束(示さず)へと伸長する少なくとも1つの腎臓上バーブ7632(図76B)を含む、頂部捕捉デバイスアセンブリ7600である。
発明の頂部捕捉デバイスアセンブリのステントはさらに、一組の支柱の間に少なくとも1つのブリッジを含み得、歯がスロットと嵌合する場合にボスが伸長するアイレットを画定し、該ブリッジからバーブが伸長する。
図76Bに示される代替的な態様において、支柱7634は、角度がつけられる。ベアステントをクラスプし、バーブを拘束する結果として支柱に角度がつけられることにより、少なくとも1つの腎臓下バーブについて、より深い谷が生じる。
図76Aと76Bの両方を参照すると、発明の頂部捕捉デバイスアセンブリの腎臓上バーブは、アイレットの主面から、主軸に対してアイレットが取り付けられる支柱を広げるのに十分な角度がつけられる(示さず)。
発明の頂部捕捉デバイスは、さらに、ステント7630の遠位頂部7636から伸長する腎臓下バーブ7635を含み得る。
発明の頂部捕捉デバイスアセンブリはさらに、ベアステント7630の遠位部に固定される管腔グラフト構成要素7637およびベアステント7630に隣接してかつ遠位にある腎臓下ステント7638を含み得、該腎臓下ステント7638は、近位7640および遠位7641頂部に連結された支柱7639を含み、該遠位頂部7641は、ベアステント7630の遠位頂部7636と実質的に直線に並ぶ。一態様において、発明の頂部捕捉デバイスアセンブリ7600の腎臓下ステント7638は、管腔グラフト構成要素7637内に固定される。パイロット穴8011(図86C)などの放射拘束内のバーブ7632の保持の結果によるベアステント支柱7631、7634の拡大により、ベアステント7630の腎臓下バーブ7635は、腎臓下ステント7638の支柱7639の間に陥凹が設けられる。
例えば、図86A、86B、86C、86Dおよび86E〜88に示されるように、歯8602を有する近位頂部捕捉部8600は、ベアステント放出位置にあり、ここで該近位頂部捕捉部は、遠位頂部捕捉部8610(ノーズコーン6860(図88A)に連結される)から分離される。ステント8620の上流頂部(図87A)は、最終的な展開の際にばねにより解放される前には捕捉されるが、歯8602のそれぞれ1つと、円周状で整列される保持ボス8612の周囲で包まれるので、それぞれの歯8602と接触するように外側に向かって放射状に伸長するか、または歯8602に近づく場合に任意のステント頂部の解放が防がれるように十分に近づく。ステント頂部についての捕捉空洞を完成するために、遠位頂部捕捉部8610は、歯8602の最も遠位端のそれぞれ1つとキチンと適合するような形状の陥凹8816を有する。したがって、遠位頂部捕捉部8610の陥凹8611は、図86A〜86Eに示されるように、ボス8612とは円周状でずれる。伸長部材8613は、近位捕捉部8600から伸長する。
先行技術Zステントは、2つの端でつながれた単一の長さのワイヤで作製される。複数の円周上で隣接したフィラメントで作製されるマルチステント8900が明細書に提供され、図89および90の例示態様に示される。先行技術ステントにはない、マルチステント8900により存在する種々の特徴がある。
マルチステント8900は、先行技術のステント/ステントグラフトに使用されるものよりも直径が実質的に小さいワイヤで作製されるされるワイヤ型ステントである。このような直径の実質的な低下に関係なく、円周の周りを複数回転することにより、先行技術のステントと同様に、それぞれのステントのそれぞれの支柱上に、全金属断面が形成される。マルチステント8900における複数回転により、複合ステント8900のそれぞれの曲り部(bend)に複数の頂部8910が作製される。これらの頂部は、治療される血管の内壁上での埋め込みを向上するために使用され得る。さらに、これらの頂部8910のそれぞれは第2のモジュール構成要素、例えば二又のステントグラフトの長い下流レグの反対にある腸間膜動脈中で展開される二又のステントグラフトの第2の部分のグラフト材料を捕まえるために使用され得る。1つの特定の使用は、これらの頂部8910を、第2のモジュール構成要素の反対にあるステントの頂部を捕まえるように使用し得ることである。該マルチステント8900は、任意の重複する領域で使用され得る。該マルチステント8900の変形は、使用されるワイヤ直径、頂部の総数および回転(フィラメント)の数を含み得る。
マルチステント8900は、図89〜94に示されるように円周状で反復される単一のワイヤで作製され得る。図89の態様は、頂部8910を積み重ね、図91の態様は、頂部9100を取り囲む。代替的に、マルチステントは、互いに絡み合わされた複数の独立のZステントであり得る。
マルチステントを使用してステントグラフトシステムの2つのモジュール構成要素を連結するために、高いモジュール引張強度を達成する直観的でない様式でグラフトおよびステントを集合させる。長手方向に管腔を折りたたんでグラフトの長手方向の長さを短くするように、グラフトを集合させる。これは、全体の有効な管腔が、内径に関して実質的に変化しないようになされる。グラフト自体で管腔を折りたたむ能力は、通常なされるよりも、レグステントを互いにさらに連続的に縫い付けることによりなされる。図95には、上部管腔内に折りたたまれた管腔の一部を表す底部表面を有するグラフトのカッタウェイ図が示される。全体的に、グラフトは依然として単一の管腔である。図96は、グラフトの折りたたまれた領域のクローズアップである。有意なことに、この折りたたみ9600は、グラフトの管腔内にある場合、グラフトの近位端に面するポケット9610を生み出す。図97は、二又のステントグラフトの腸間膜両末端に適合された図95および96の配置の例の写真である。この特定の例は、図における右の最後のステント、左の最後のステントのすぐ隣にあるステントの間の折りたたみを示す。所望の場合、この配置は、図97に示されるように二又の両方のレグに設定される。
これらの折りたたみ9600は、モジュール構成要素を受容するステントグラフトの領域内に設置される。したがって、折りたたみ9600は、ステントグラフト構成要素の遠位端の付近に作製される。これらの折りたたみ9600は、全長に沿って複数の点でなされ得、ほぼ末端または両方の場所でもなされ得る。折りたたみ9600を定位に維持するために、グラフトの層全体を通じて長手方向のステッチが縫い付けられる。これらのステッチは、図97において参照記号「A」により示される。長い方のレグ上に示されるステッチと同様に折りたたみがセグメントの末端にある場合(図97の上部)、2つの層のグラフト材料がある。対照的に、ステッチAが2つのステントの間にある場合(図97の底部)、3つの層のグラフト材料が存在する。グラフト構成要素の折りたたみは、グラフトの管腔上にポケットを生み出すようになされる。これらのポケットは、モジュール固定機構の第2の構成要素、ステントを受容するために使用される。
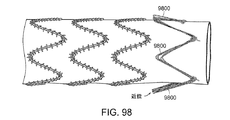
グラフトに取り付けられたマルチステントは、挿入構成要素の近位端またはその付近に見られる。マルチステントは、図98に示されるように、縫い付けられていない遠位に面する頂部9800を解放するように取り付けられる。マルチステント配置もここに示される。縫い付けられていない遠位に面する頂部を解放することにより、該頂部は、第1の構成要素のグラフトを折りたたむことにより作製されたポケット9610に適合し得る。ポケット9610に適合するステントの縫い付けられていない頂部を使用することに加えて、ステントなし構成要素が第2の構成要素に付加され得る。別の代替物は、ステントの遠位端に突出した特徴を含み得る。これらの特徴のいくつかの例示的な配置を図99および100に示す。示されるように複数のフィラメントを有することにより、少なくともいくつかのフィラメントの頂部が、連結構成要素中でポケット9610と嵌合する可能性が高くなる。フィラメントの総数は重要でなく、同様にして1フィラメントステントも縫い付けられ得る。
図99に示される配置は、近位の支柱(近位頂部に隣接する)のより大きなパーセンテージでなされた縫い付けを有することにより、図98に示される配置とは異なる。余分な縫い付けにより、嵌合ステントのステントグラフトに対する確実な取り付けの確実性が増す。さらに、遠位頂部9900はステントグラフトの壁から外側に広がる。遠位頂部9900を広げることは、頂部のいくつかまたは全てが反対にある構成要素のポケットを掴む可能性を高めるためになされる。さらに、マルチフィラメントステントのフィラメントの全てではないがいくつかは切断される。フィラメントの切断により、反対にある第1の構成要素への第2の構成要素のさらなる独立した掴み点も生み出される。フィラメントの(全てではないが)いくつかを切断することの裏にある概念は、セグメント内のいくつかの放射状の力を維持することである。図100に示される配置は、遠位頂部10000の全ての切断を示す。この配置により、ポケット9610(または他の位置)についての最大数の掴み点が生み出される。この兼ね合い(trade off)は、上述のように、ステントのこの領域に放射状の強度がないということである。図100の配置は、単一の頂部切断のみを有する。所望の場合、全てまたは1つより多くの頂部がこの様式で切断され得る。
図101に示される配置は、完全に縫い付けられたステント10110に右側で隣り合う部分的に縫い付けられた、縫い付けられたステント10100を提供することにより、図98〜100の配置を変形させる。この変形の2つの利点はすぐに生じる。第1に、放射状の強度が増加する。これは、第1の構成要素の管腔に対して両方のステントを維持することを補助する。第2に、この配置は、デバイス全体の管腔を遮断し得る第2の構成要素の起こり得る内側への折りたたみを防ぐことを補助する。この型の内側への折りたたみは、大きな軸方向の荷重の下で配置された第2の構成要素の不十分に支持されたセグメントの結果である。遠位頂部または他の突出部材が第1の構成要素のポケットを掴んだ場合、先端(近位)頂部は、管腔内に折りたたまれ得る。軸方向の荷重による内側への折りたたみのこの起こり得る問題を防ぐ別の方法は、第1の構成要素と嵌合することが意図されたステントに対して近位に、十分に支持されたステントを提供することであり得る。
図102に示される配置には、第1の構成要素のポケット9610(図96)と嵌合するために使用されるステントなし構成要素10200が図示される。ここで、生体適合性プラスチックまたはポリマーは、内部に階段を有する閉じた梯子の形状であり、階段のいくつかは、ステントグラフトに連結され得る。図102に示されるように、最も上の階段は、上流頂部のそれぞれにおいて頭方(上流)ステントに連結される。当然のことながら、構成要素10200のかかる頂部のより少ない数が、ステントなし構成要素10200に連結され得る。所望の形状は、ポケット9610または血管壁を捕捉するために外側に曲がった遠位端(下流)を有する。ステントなし構成要素10200を使用することの1つの利点は、隣接構成要素間で、非金属が摩耗を低減することである。これらのステントなし構成要素10200は、ステントのいくつかもしくは全ての頂部のいくつかもしくは全て、またはステントの間で配置され得る。
ポケット9610(図96)または血管壁に連結するために使用され得るデバイスの別の例示的な態様を、図103〜104の変形に示す。下流の捕捉ペグ10310を有するステント10300は、明細書に記載されるモジュールステント固定機構において使用され得る。この態様において、遠位に力をかけるステントのペグ10310は、外側に広げられ、尖っていない。この変形により、遠位に面するペグ10310は、ペグ10310が連結される第1の構成要素のファブリックを貫通することが意図されない。かかる配置において、遠位に面するペグは、第1の構成要素内に作製されたポケット9610(図96)で終結し得る。
さらに別の態様において、かつ図78Aおよび78Bを参照して、発明は、第1の管腔グラフト構成要素7840、第1の管腔グラフト構成要素7840の外表面に沿って伸長しかつ固定される複数の外側のステント、2つの外側ステント7861、7871の間の内側ステント7860を含む第1のステントグラフト7820、2つの外側ステントの1つが第1の管腔グラフト構成要素7840の遠位端7880にあり、該内側ステント7860は第1の管腔グラフト構成要素7840の内表面に固定され、かつ第1の管腔グラフト構成要素7840内で一般的に近位に示される複数のバーブ7863を有する;ならびに第2の管腔グラフト構成要素7874、および第2の管腔グラフト構成要素7873の外表面に沿って伸長しかつ固定されて複数の外側ステント7875を含む第2のステントグラフト7873を含む、ステントグラフトシステム7809であり、ここで、第1のステントグラフト7820および第2のステントグラフト7873のそれぞれの少なくとも2つのステントと重なるための、第2のステントグラフト7873の第1の管腔グラフト構成要素7840の遠位端7880への挿入は、バーブ7863の少なくとも一部と、第2のステントグラフト7873の第2の管腔グラフト構成要素7874のステントの間で干渉する関係を生じる。第1および第2のステントグラフトの最大および最小の重複の例を図79Aおよび79Cに示す。
ステントグラフトシステム7809の第1の管腔グラフト構成要素7840は、二又になり得、内側ステント7860は、第1の管腔グラフト構成要素7840の2つのレグの1つに配置され得る。
発明のステントグラフトシステムはさらに、二又の第1の管腔グラフトの第2のレグ7890の外側表面に沿って伸長しかつ固定される複数の外側ステント7891、および1つが第2のレグ7890の遠位端7893にある2つの外側ステントの間の第2の内側ステント7892を含み得、第2の内側ステント7892は、第2のレグ7890の内表面に固定され、かつ第2のレグ7890内で一般的に近位に示される複数のバーブ7894を有する。
図79Aに示される第3のステントグラフト7895は、第3の管腔グラフト構成要素7896、および第3の管腔グラフト構成要素7896の外表面に沿って伸長しかつ固定された複数の外側ステント7897を含み、第2のレグ7890およびステントグラフト7895のそれぞれの少なくとも2つのステントに重なるような、第3のステントグラフト7895の、第2のレグ7890の遠位端7893への挿入により、バーブ7894の少なくとも一部と、第3のステントグラフト7895のステントまたは第3の管腔グラフト構成要素7896との間に干渉する関係が生じる。
発明のステントグラフトシステムのステントは、少なくとも部分的に、ニチノールなどの超弾性金属で形成され得る。
図105Aに示される変形は、下流頂部10520からではなく上流頂部10530から下流に突出するペグ10510を有するステント10500である。図106に示される変形において、ステント10600は、下流頂部10620から突出する尖ったレグ10610を有する。尾方に面するバーブは、レグステントのいくつかまたは全ての頂部に配置され得る。尖ったバーブは、グラフトが配置されるプロテーゼのグラフト材料を貫通し得る。多くの場合、この配置は、二又であるが、前もって配置されたレグ伸長でもあり得る。
発明のさらなる態様は、図79Aおよび79Cに示すステントグラフトシステムと本質的に同一であるが、少なくとも一組のバーブ7863および7894を欠く入れ子式のステントグラフトシステムである。この代替的な態様において、二又の第1のステントグラフトは、二又の第1の管腔グラフト構成要素、該二又の第1の管腔グラフト構成要素の2つのレグの1つの外表面に沿って伸長し、かつ固定される複数の外側ステントを含む。任意に、内側ステントは、1つが第1の管腔グラフト構成要素の遠位端にある2つの外側ステントの間に伸長し、該内側ステントは、第1の管腔グラフト構成要素の内表面に固定される。第2のステントグラフトは、第2の管腔グラフト構成要素、および第1の管腔グラフト構成要素の外表面に沿って伸長しかつ固定される複数の外側ステント、第2のステントグラフトは、第1および第2のステントグラフトのそれぞれの少なくとも2つのステントに重なるように、二又の第1の管腔ステントグラフトの2つのレグ構成要素の第1の遠位端に挿入され得る;二又の第1の管腔グラフト構成要素の第2のレグの表面(例えば外表面および/または内表面)に沿って伸長しかつ固定される複数のステント(例えば、外側ステントおよび/または内側ステント)を含む。任意に、第2の内側ステントは、1つが第2のレグの遠位端にある2つの外側ステントの間に配置され、該第2の内側ステントは、第2のレグの内表面に固定される。また、任意に、第3のステントグラフトは、第3の管腔グラフト構成要素、および第3の管腔グラフト構成要素の外表面に沿って伸長しかつ固定される複数の外側ステントを有し、ここで、第1および第2のステントグラフトのそれぞれの少なくとも2つのステントに重なるように、第3のステントグラフトの挿入(insertion)は、二又の第1の管腔グラフト構成要素の第2のレグの遠位端に挿入され得る。それにもかかわらず、第1のレグは、第2のレグよりも短く、第1のレグは、第2のステントグラフトのそれぞれの少なくとも2つのステントの重複のために必要なものよりも少なくとも1つ多いステントを含む。
一態様において、発明の二又のステントグラフトの1つのレグは、図78A、78B、79Aおよび79Cに示されるように、二又のステントグラフトの他方のレグ(すなわち、第2または長いレグ)よりも長さが短くあり得る(すなわち、第1または短いレグ)。発明の二又のステントグラフトが腹部大動脈に設置される場合、二又のステントグラフトの長いレグは、例えば図72Aに示されるように総腸骨または大動脈内にあり得る。
図78Aおよび78Bに示されるように、発明の入れ子式のステントグラフトシステムの二又の第1のステントグラフトは、少なくとも1つの放射線不透過性マーカー7800を含み得る。特定の態様において、二又の第1のステントグラフトの短いレグは、3つの側方放射線不透過性マーカー7801、7802、7803を含み、それらの1つは短いレグの遠位開口にあり、別の1つは内側ステントの頂部の近位端にあり(すなわちレグ開口からの第2のステント)、第3のものは、第1のステントグラフト上の二又の点にある。例えば図78A、78B、127A、127B、127Cおよび127Dを参照して示されるように、内側ステントの頂部に配置される放射線不透過性マーカー7802は、第3のステントグラフトの最小(min)位置の輪郭をたどり得、放射線不透過性マーカー7803は、第3のステントグラフトの最大(max)位置の輪郭をたどり得る。2つのさらなる放射線不透過性マーカー7804、7805は、短いレグの遠位開口の周囲に分布される。放射線不透過性マーカー7806は、二又の第1のステントグラフトの長いレグの内側ステントの近位端に配置される。
発明の送達システム、送達システムの構成要素、ステント、グラフトおよびステントグラフトシステムは、腹部大動脈瘤などの動脈瘤を治療する方法に使用され得る。
別の態様において、発明は、送達システムのシースおよび遠位先端を、患者の大腿動脈などの動脈を通して、その後総腸骨動脈などの動脈を通過し得るように患者の腹部動脈瘤に方向づける工程、該シースは、二又のステントグラフトを含む;シースに差し込まれるように連結された送達システムのリードスクリューナットを回転させ、二又のステントグラフトから少なくとも部分的にシースを収縮させる工程;およびリードスクリューナットをシースに差し込まれるように連結させたまま、送達デバイスのハンドル体に沿ってリードスクリューナットをスライドさせ、それによりシースをさらに収縮させる工程、ここで二又のステントグラフトは、腹部動脈瘤内で少なくとも部分的に展開され、それにより腹部動脈瘤を治療する、を含む腹部動脈瘤を治療するための方法である。
腹部動脈瘤を治療する方法はさらに、送達デバイスの遠位端でクラスプ用の穴を開け(opening a clasp)、二又のステントグラフトの近位端でベアステントを解放する工程を含み得る。二又のステントグラフトの第1のレグの一部は、クラスプが開けられて、ベアステントを解放する場合、シース内に保持され得る。二又のステントの第1のレグは、ステントを、シースとレグクラスプの間の第1のレグの遠位端で固定することにより、保持され得る。二又の第1のレグは、二又のステントの2つのレグの長い方である。
別の態様において、腹部動脈瘤を治療する方法に使用されるクラスプは、ベアステントを露出させるようにシースを十分に収縮した場合、送達システムの主軸に向かって近位ステントの支柱を広げ得る。
腹部動脈瘤を治療する方法はさらに、第1のレグを少なくとも部分的にシースの内部に保持ながら、ステントグラフトを伸長させて二又のステントの第2のレグにカニューレ挿入する工程を含み得る。カニューレ挿入の間に、保持されるレグは、カニューレ挿入されるレグよりも長く、任意に、カニューレ挿入されるレグは、伸長ステントグラフトと入れ子式の関係にある。カニューレ挿入されるレグは、カニューレ挿入されるレグおよび伸長ステントグラフトのそれぞれの少なくとも2つのステントにより、伸長ステントグラフトと重なり得る。カニューレ挿入されるレグは、カニューレ挿入されるレグおよび伸長ステントグラフトのそれぞれの2つのステントにより、伸長レグと重なるために必要なものよりも少なくとも1つより多くのステントを含み得る。カニューレ挿入されるレグの遠位端からの第2のステントは、二又のステントグラフトのグラフト内にあり得る。二又のグラフトの遠位端からの第2のステントは、ステントから内側かつ近位に伸長するバーブを含み得る。
別の態様において、腹部動脈瘤を治療する方法は、レグクラスプから二又のステントグラフトを解放する工程、次いで、送達デバイスの残りからスライダーおよびシースを解離する工程、ならびにスライダーおよびシースを実質的に定位に残しながら、患者からデバイスの残りを引き抜く工程をさらに含み得、任意に、シースを通して第1のレグまで第2の伸長を送達する工程、および第2の伸長を伴った第1のレグをカニューレ挿入する工程をさらに含む。カニューレ挿入される第2のレグは、カニューレ挿入される第1のレグおよび第2の伸長のそれぞれの少なくとも2つのステントにより、伸長ステントグラフトと重なり得る。カニューレ挿入される第1のレグは、カニューレ挿入される第1のレグおよび第2の伸長のそれぞれの2つのステントにより、伸長レグと重なるために必要なものよりも少なくとも1つより多くのステントを含み得る。カニューレ挿入される第1のレグの遠位端からの第2のステントは、二又のステントグラフトのグラフト内にあり得る。二又のグラフトの遠位端からの第2のステントは、ステントから、内側かつ近位に伸長し得る。
発明の方法は、例えば、臨床医が最適に満たないグラフトの最初の位置を決定する場合、グラフト(例えば、二又のグラフト、第2のステントグラフト、第3のステントグラフト)を再配置する利点を有する。グラフトは、その近位端および遠位端で、大動脈または大動脈の分岐、例えば総腸骨動脈において近位かつ遠位に再配置され得る。
図105A、105Bおよび105Cは、発明の入れ子式のステントグラフトシステムにおけるステントおよびステントの使用の態様を表す。
図107〜109は、ステント自体の材料を使用せずに、フックまたはバーブをZステント、特にベアステントに一体化するための種々の配置を図示する。図107は、発明によるクリンプフック10700の例示態様を図示する。フック10710は、内部管状(endoluminal)ステントグラフトプロテーゼ上のベアステント10800(ベアばね)の一部となるクリンプスリーブ10720に取り付けられるかまたは一体化される。多くのZステントは、クリンプスリーブにより2つの末端ですでに連結されて円周を完成させる。該配置は、展開されると、血管の周囲の組織にステントグラフトアセンブリの能動的な固定を付加し、展開後のプロテーゼの移動を防ぐ。クリンプフック10700を作製するために、例えばフック10710(所望の場合、先細り(pointed)または尖ったワイヤであり得る)をクリンプスリーブ10720のボディ部に溶接し得る。次いで、クリンプフック10700を、支柱10810にクリンプ(または溶接)することにより、ベアステント10800の末端に取り付ける。複数のクリンプフック10700が所望の場合、クリンプフック10700は、例えば1つの頂部10830および支柱10840の二等分したもので画定される個々のステント部10820に連結され得る。
図107に示される例示的な管状構造とは代替的に、クリンプスリーブ10720は、2つの隣接する支柱10840の半分(またはちょうど1つの割れていない支柱10840)上に配置された、その上にクリンプされるクラムシェルであり得る。ベアステント10800にクリンプフック10700を備えた後、図109に示されるようにステントグラフト10900の末端にクリンプフックを固定し得る。図109においてクリンプフック10700は、この図面の図中に見られ得るようにベアステント10900のそれぞれの支柱10840の周囲で回転されるように示される。しかしながら、血管壁との最適な並列のための使用において、フック10710は、実質的に放射状にステントグラフトの長手方向の中心軸から外側に向かって先細りする。
上述のベアステントクリンプフックと対比して、図110および111には、図112および113に示されるようなグラフト11200の主ボディ部のへりに取り付け/固定されるクリンプフック11000が図示される。示される配置によると、クリンプフック11000は、グラフト材料(点線11100で示される)のへりをスライドし、クリンプピンチの2つのへり11110、11120がそれらの間にグラフト材料11100をはさんでグラフト材料11010上に機械的施錠が生じるように圧縮される。この配置は、展開されるとステントグラフトアセンブリの活性な固定を血管の周囲組織に付加し、展開後のプロテーゼの移動を防ぐ。上述のように、フック11010は、クリンプ体11020に溶接され得、または例えばそれらと一体化され得る。
ステントグラフト(チューブまたは二又)のベアステントの上にバーブまたはフックを提供することにより、外部シースまたは血管壁の内部に、不都合な穿刺または断片化(scraping)が起こる可能性が高まることに注意されたい。特に、図73〜76、79〜85および103〜106のステントの態様に関して、例えば、外部シースまたは血管壁のいずれかに不注意の損傷が生じる可能性を全体的に防ぐことが望ましい。かかる損傷が起こることを防ぐために、かかるバーブを有するベアステントを使用する発明の送達システムには、材料傘(material umbrella)11400が施される。
図114に図示される一例示的態様において、傘11400は、(スライド可能または固定されるように)近位頂部捕捉部11420を制御する管腔11410に取り付けられる。ステントグラフト11500が折りたたまれて外部シース11510内に充填され、近位頂部捕捉デバイス11420、11520(図115に示すように)内に捕捉される場合、ベアステント11530は、グラフトの先導するへりと、頂部捕捉デバイス11420、11520の間の距離に広がる。傘11400は、ステントグラフトの外側(および外部シース11510の内側)に配置され得るが、図114および115に示される例示態様においては、傘11400は、傘11400と外部シース11510の両方の内部の管腔11410に保持される。傘11400のアーム11402は、ベアステント11530のそれぞれの頂部の間で、傘から伸長する。アーム11402は、それぞれが頂部を通過する中間部では比較的狭く、それらの遠位端では比較的広く広げられる。かかる配置において、それぞれのアーム11402の遠位端は、隣接するベアステントの頂部を超えて外側に広がり得、十分に広がる場合、隣接する他のアーム11402と重なり、図115に示されるように露出されたベアステント11530の円周全体の周囲を覆う(canopy out)。アーム11402の遠位部では、近位頂部捕捉部11420のそれぞれの歯がそれらを通じて伸長し得るように、少なくとも1つの通路11404が形成される。この配置において、アーム11402の広い遠位部は、制御され、ベアステントに対してとどまり、頂部捕捉デバイス11420、11520が作動する(図115に示される位置であるが、ベアステント11530およびアーム11402は近位頂部捕捉部11420の歯から依然として解放されていない)まで、外部シース11510および内部血管壁を保護する。図116は、送達システムが内部管腔11410を収縮させる前に、傘11400がどのようにして血管壁11600の内部を保護するかを示す写真である。内部管腔11410が収縮されると、傘11400は、ベアステント11530と血管壁11600の間から外側へスライドする。
ステントグラフトの腎臓下バーブが望ましくない例示態様において、該バーブは、傘11400のファブリックストリップにより覆われ得るように、ベアステント上でより高く動き得る。
図117〜124は、先細の(taper)先端を広げ、ノーズコーン/先端と外部シースの間の密封を作製/向上しするために近位クラスプを使用する発明の概念を図示、接触面は先端と外部シースの間の空間を収めることにより外部シースのへりの発表(pronouncement)を排除する。明細書に記載の送達システム(例えば、AAA送達システム)、外部シースを後ろに残したまま送達システムの内部構成要素(先端/支持部材)を取り除く概念は、該先端を、外部シースのIDよりも小さくすることを必要とする。より小さな形状の先端のために、「魚の口(fish mouthing)」の問題が、先端-シースの境界面で起こり得る。先端シースの境界面が血管を誘導する際にシースのへりが発表される場合、「魚の口」が生じ、これは、潜在的に、血管壁に刻み目を付け得る(図117および118参照)。この問題を解消するために、先端の除去を可能にしたまま、先端とシースの間の空間を排除する必要がある。図119〜120参照。遠位クラスプ(claps)の下にあるこの材料の除去を達成することで、近位クラスプをより前方に動かすことを可能になるので、先細の先端は、シースと先端の間の空間にリップを有するクラスプに対して広げられ得る。
図125および126は、発明のAAA二又ステントグラフトのための受動的な近位保持器12500の例示態様を図示し、該保持器12500は、明細書においてスポーク付きハブという。近位保持器は、AAA二又ステントグラフトの同側レグを必要とする。該近位固定は、ガイドワイヤおよびレグステントを有する反対側のレグのカニューレ挿入の間に、ステントグラフトを、シースが展開した状態に保持する。該受動的な近位保持器デバイス12500は、ステントグラフトの近位端で支持部材に適合されるハブである。受動的な近位保持器デバイス12500は、中心ハブ12504から外側に広がるスポーク12502を有する。該スポークの数は、ステントの近位末端の支柱の数と同等である。該スポークは、充填プロセスの間に、ステントの個々の支柱により嵌合およびトラップされる。ステントグラフトは、漏斗を使用して、展開されたシースに充填される。ステントの近位端が、展開したシースのすぐ周囲にある場合、支持部材は次にグラフトに充填され、ハブのスポークは、グラフトの支柱において嵌合する。次いで、グラフトおよび支持部材はシースの中に引きこまれる。ステントの展開の際に、グラフトは、スポークハブに対してシースが十分に収縮されるまで、シースから解放されない。スポークの外径(OD)は、シースの内径(ID)より小さく約0.008インチであり、そのためステントの支柱は、シースが収縮されるまでスポーク付きハブによりトラップされる。
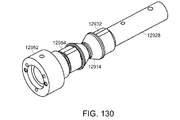
発明の一態様において、図129A〜Dに示される止血弁12900は、弁ハウジング12902の主長手軸12906に直行して伸長するスロット12904を画定する長手方向弁ハウジング12902を含む。長手方向弁ハウジング12902は、内表面12908を画定し、近位端12910および遠位端12912を有する。ガスケット12914は、内部導管12916を画定し、遠位端12918を有し、ここで遠位端12918は、長手方向弁ハウジング12902、および長手方向弁ハウジング12902に対して移動可能な近位端12920に対して固定される。ガスケット12914はまた、遠位端12918と近位端12920の間に折りたたみ可能な中間部12922を含む。一態様において、中間部12922は、ガスケット12914が十分に開いた場合、内部導管12916の残りに対して狭い内径を有する。別の態様において、ガスケット12914の内部導管12916は、ガスケット12914の遠位端12918から近位端12920まで本質的に一定の直径を有する。中間部12922の内径は、ガスケット12914を通って伸長する主長手軸12906の周囲で、ガスケット12914の少なくとも1つの端を他の端に対して回転させることによりさらに低減する。ガスケット12914の適切な材料の例としては、シリコン、ウレタン、ゴムおよびラテックスからなる群より選択される少なくとも1つの材料などの当該技術分野で公知のものが挙げられる。好ましい一態様において、ガスケット12914はシリコンを含む。特定の一態様において、ガスケット12914は、シリコンのコーティングを含む。長手方向弁ハウジング12902の近位端12910にはグリップアセンブリ12924が配置される。グリップアセンブリ12924は、長手方向弁ハウジング12902の第1の端12910でグリップ部12926を含む。グリップアセンブリ12924のスピンドル部12928は、スクリュー12930によりグリップ部12926に固定され、グリップ部12926から、長手方向弁ハウジング12902の内表面12908まで伸長する。図130に見られるように、スピンドル部12928は、近位オエティカクランプ12932によりガスケット12914の近位端12920(図129A)に固定される。図129A〜Dに戻ると、ラチェット12934は、スピンドル部12928の周囲に伸長し、ピン12936によりスピンドル部12920に固定され、長手方向弁ハウジング12902のスロット12904を通っても伸長する。ラチェット12934は、スピンドル部12928の周囲に伸長するラチェット12934の端で歯12938を画定する。
図131A〜Cに見られるように、長手方向弁ハウジング12902は、内表面12908で遠位に面する表面12942を画定する近位端12910に、リップ12940を含む。ばね、例えば波型ばね12944は、スピンドル部12928の周囲に伸長し、遠位で面する表面12942でのグリップ部12926と、ラチェット12934からの間に配置される。別の態様において、ばねは、圧縮ばねである。代替的に、当該技術分野で公知のような他の適切なばねが、波型ばねの代替物として使用されてもよい。波型ばね12944は、遠位方向12946で、主長手軸12906に対してラチェット12934を斜めにする(bias)(図129A、129B)。
ラチェット12934は、スピンドル部12928の周囲に伸長し、波型ばね12944と、スピンドル部12928の周囲にも伸長する干渉要素12948の間で定位に保持される。干渉要素12948は、スクリュー12950により長手方向弁ハウジング12902に固定される。ガスケット12914の遠位端12918は、遠位オエティカクランプ12954により主要ボス12952に固定される。主要ボス12952(図129A、129B)は、スクリュー12956により長手方向弁ハウジング12902の遠位端12912で固定される。
一態様において、干渉要素12948は、ラチェットの歯12938と接する少なくとも1つのピン(示さず)を含む。別の態様において、干渉要素12948は、ラチェット12934の歯12938と接する歯12958を画定する。干渉要素12948は、ラチェット12934に対して起こり得る複数の異なる位置に嵌合し、それにより、それぞれの位置は、十分に開いた位置と十分に閉じた位置の間のガスケット12914の別の位置に対応する。十分に開いた位置と十分に閉じた位置の間のガスケット12914の位置は、図131A〜Cに示されるようにスロット12904内のピン12936の位置で示される。ガスケット12914は、ガスケット12914から伸長する少なくとも1つのカテーテル(示さず)の周囲に適合する。
グリップ部12926の回転により、スピンドル部12928の回転、および結果的に、ガスケット12914の遠位端12918に対してガスケット12914の近位端12920の回転が生じ、それによりグリップ部12926が図131Bに示される一方向に回転される場合にガスケット12914が閉じられ、グリップ部12926が図131Cに示される反対方向に回転される場合、ガスケット12914が開かれる。干渉要素12948の歯12958と、ラチェット12934の歯12938の干渉により、グリップアセンブリ12924、および結果的にガスケット12914が、十分に閉じた位置、十分に開いた位置および充分開いた位置と十分に閉じた位置の間の位置において、ガスケット12914の潜在的に異なる位置で保持される。干渉要素12948およびラチェット12934は、ラチェット12934が外科医の操作により干渉要素12948に対して異なる回転位置に動かされない場合、それぞれの相対的な位置で保持される。波型ばね12944は、干渉要素12948の歯12938に対してラチェット12934の歯12938を強制的に動かす。
図129A〜129Dを参照すると、x弁12960、12962は、主要ボス12952の陥凹部12964内の遠位端12913で重ねされ、ばねピン12966およびガスケットスペーサー12968により定位に保持される。x弁12960、12962はそれぞれ少なくとも1つの密封構成要素12970を含み、密封構成要素12970は少なくとも1つのスロット12972を画定する。x弁12960の支持層12998は、少なくとも部分的に密封構成要素12970に埋め込まれる。示されるように、x弁12960の密封構成要素12970は、複数のスロット12972、12978を含む。スロット12972、12978は互いに交差する。一態様において、スロット12972、12978は異なる角度で交差する。図132Aに示されるように、スロット12972、12978は同じ角度で交差する。別の態様において、図132Bに示されるように、x弁12961は複数の密封層12980、12982を含む。一態様において、それぞれの密封層は少なくとも1つのスロットを含む。図132Bに示されるように、密封層12980、12982のスロット12984、12986は実質的に直線に並ぶ。別の態様において、密封層12980、12982の(示さない)スロット12980、12982は、互いにずれ得る(can be offset)。それぞれの密封層のそれぞれの交差スロットは、それぞれの密封構成要素のスロットの交差の角度の2分の1だけ互いにずれ得る。それぞれのx弁の密封構成要素12980、12982は支持12998により分けられる。図132Bに示される好ましい態様において、それぞれの密封構成要素12980、12982は、直角に交差する一組のスロット12984、12986を有する。再度図129Cを参照すると、それぞれのx弁12960、12962のスロット12972、12990 は、それぞれのスロットの交差の角度の2分の1だけ互いにずれる。示されない代替的な態様において、それぞれのx弁12960、12962のスロット12974、12978は直線に整列される。
典型的に、密封層は、当該技術分野で公知のような適切な材料で形成される。適切な密封材料の例としては、シリコーン(silicon)、ウレタン、ゴムおよびラテックスからなる群より選択される少なくとも1つの部材が挙げられる。
見られるように、x弁12960の支持層12998は、周辺リング12992および周辺リング12992からスロット12972の交差に近位の点まで伸長する複数のアーム12994を含む。それぞれのx弁の支持は、当該技術分野で公知のような適切な材料で形成される。支持層12998の適切な材料の例としては、ニチノールおよびチタニウムが挙げられる。好ましい態様において、支持層はニチノールを含む。
ガスケットスペーサー12968とOリングスペーサー12999の間に、止血弁の遠位端12912で、ワイパー12996が保持される。Oリングスペーサー12999、ガスケットスペーサー12968および主要ボス12952を通ってばねピン13002が伸長し、アセンブリ補助として機能する。Oリングスペーサー12999および主要ボス12952を通ってスクリュー13000が伸長し、長手方向弁ハウジング12902に通され、それによりOリングスペーサー12999、主要ボス12952および全ての中間構成要素が定位で維持される。
明細書に引用される全ての特許、公開された出願および参考文献の教示は、その全体において参照により援用される。米国特許第7,763,063号;第8,292,943号;第8,308,790号;第8,007,605号;第8,070,790号;第8,062,349号ならびに米国特許出願第11/699,700号;第11/700,609号;第11/449,337号;第11/701,867号;第11/449,337号;第11/701,876号;第11/828,653号;第11/828,675号;第12/137,592号および第12,723,431号の教示もその全体において参照により明細書に援用される。本発明はその例示態様を参照して具体的に示され記載されるが、添付の特許請求の範囲に包含される発明の範囲を逸脱することなく、形態および詳細における種々の変更が発明においてなされ得ることが当業者には理解されよう。
本発明の態様として、以下のものが挙げられる。
[1]a) 導管を画定し、かつ近位端および遠位端を有する長手方向弁ハウジング;
b) 該ハウジング内のガスケット、該ガスケットは、内部導管を画定し、かつ
i) 遠位端部、該遠位端は長手方向弁ハウジングに対して固定される、
ii) 長手方向ハウジングに対して可動な近位端部、および
iii) 該遠位端と該近位端の間の折りたたみ可能な中間部
を有する;
c) 長手方向弁ハウジングの近位端にあり、ガスケットの近位端に連結されるグリップアセンブリ、該グリップアセンブリは、長手方向弁ハウジングに対して回転可能であり、かつ
i) 長手方向弁ハウジングの第1端のグリップ部、
ii) 該グリップに固定され、該グリップ部から該長手方向弁ハウジングの導管に伸長するスピンドル部、該スピンドル部は、該ガスケットの近位端でガスケットに固定される、
iii) 該スピンドル部の周囲に伸長し、該スピンドル部に固定される歯車、該歯車は、該スピンドルの周囲に伸長する歯車の端で歯を画定し、該歯車は、長手方向弁ハウジングに対する方向で、かつ長手方向弁ハウジングの主長手軸に沿ってバイアスとされ(being biased)る、
を含む;ならびに
d) 該歯車の歯に干渉する該長手方向弁ハウジング内の干渉要素、該干渉要素に対して該歯車の歯はバイアスとされ、
該長手方向弁ハウジングに対する該グリップ部の回転によりガスケットの遠位端に対するガスケットの近位端の回転が生じ、それにより該内部導管の内径が変化し、該ハウジングに対する該グリップの回転により、該歯車の歯に、該干渉要素と歯車との分離および再嵌合が生じ、該歯車と干渉要素との再嵌合により、該長手方向弁ハウジングに対するグリップの回転の終結時における該ガスケットの内部導管の直径に、所定の位置でロックされる、
を含む、止血弁。
[2]長手方向弁ハウジングが、内部表面を画定し、かつ該長手方向弁ハウジングの近位端にリップを含み、該唇部は、内部表面で、遠位に面する表面を画定し、さらに該歯車の近位端と、該唇部の遠位に面する表面との間にばねを含み、該歯車は、長手方向弁ハウジングに対する方向で、かつ該長手方向の弁ハウジングの主軸に沿ってバイアスとされる、[1]記載の止血弁。
[3]該干渉要素が、該歯車の歯と接する少なくとも1つのピンを含む、[2]記載の止血弁。
[4]該干渉要素が、該歯車の歯と噛み合う歯を画定する、[2]記載の止血弁。
[5]該干渉要素が、該歯車の歯に対して複数の干渉位置で嵌合し得、それによりそれぞれの位置が、十分に開いた位置と十分に閉じた位置の間の、ガスケットの別々の位置に対応する、[2]記載の止血弁。
[6]該ばねが波型ばねである、[2]記載の止血弁。
[7]該ばねが圧縮ばねである、[2]記載の止血弁。
[8]該ガスケットの内部導管が、該ガスケットの遠位端部から近位端部まで本質的に一定の直径を有する、[2]記載の止血弁。
[9]該中間部が、該ガスケットの近位端および遠位端と隣接する中間部の外径に対して、中間部の一部で狭い外表面を画定する、[8]記載の止血弁。
[10]該ガスケットが、シリコーン、ウレタン、ゴムおよびラテックスからなる群より選択される少なくとも1つの物質を含む、[1]記載の止血弁。
[11]該ガスケットがシリコーンを含む、[10]記載の止血弁。
[12]該ガスケットがシリコーンのコーティングを含む、[11]記載の止血弁。
[13]少なくとも1つのx弁をさらに含み、該x弁が、交差スロットを画定する少なくとも1つの密封構成要素を含み、該密封構成要素が、少なくとも部分的に支持層を埋め込み、該x弁が、該止血弁の遠位端および該ガスケットの遠位に配置される、[1]記載の止血弁。
[14]該支持層が、周辺リング、および該周辺リングから該スロットの交差の近位の点へと伸長する複数のアームを含む、[13]記載の止血弁。
[15]該支持層がニチノールを含む、[14]記載の止血弁。
[16]該密封構成要素が少なくとも2つの交差スロットを画定する、[13]記載の止血弁。
[17]該スロットの全てが同じ角度で交差する、[16]記載の止血弁。
[18]該スロットが異なる角度で交差する、[16]記載の止血弁。
[19]該x弁が、互いに隣接する一組の密封構成要素を含み、該密封構成要素のそれぞれが、少なくとも1つのスロットを画定し、該密封構成要素が、少なくとも部分的に支持層により分けられる、[13]記載の止血弁。
[20]それぞれの密封構成要素のスロットが互いに交差し、かつ該止血弁を通って伸長する主長手軸に沿って見た場合、互いにずれる(offset)、[19]記載の止血弁。
[21]それぞれの密封構成要素が、少なくとも2つの交差スロットを含み、それぞれの交差スロットが、それぞれの密封構成要素の該スロットの交差の角度の2分の1だけ互いにずれる、[20]記載の止血弁。
[22]それぞれの密封構成要素が、直角に交差する一組のスロットを有する、[21]記載の止血弁。
[23]該密封構成要素が、シリコーン、ウレタン、ゴムおよびラテックスからなる群より選択される少なくとも1つの部材を含む、[22]記載の止血弁。
[24]該密封構成要素がシリコーンを含む、[23]記載の止血弁。
[25]該密封構成要素がシリコーンのコーティングを含む、[24]記載の止血弁。
[26]該支持層がニチノールを含む、[23]記載の止血弁。
[27]該少なくとも1つのx弁が収容される(seat)主要ボスをさらに含む、[13]記載の止血弁。
[28]該止血弁がワイパーアセンブリをさらに含み、該ワイパーアセンブリがワイパーガスケット、Oリングスペーサーおよびガスケットスペーサーを含み、該Oリングスペーサーおよびガスケットスペーサーが該ワイパーガスケットを固定し、該ワイパーアセンブリが該主要ボスに隣接する、[27]記載の止血弁。
[29]該止血弁がロールピンをさらに含み、該ワイパーアセンブリが、該ロールピンにより主要ボスに固定される、[28]記載の止血弁。
[30]a) 弁ハウジング;
b) 該弁ハウジング内の少なくとも1つの密封構成要素、該密封構成要素は、少なくとも1つのスロットを画定する;および
c) 該密封構成要素内に少なくとも部分的に埋めこまれた支持層
を含む、x弁。
[31]該密封構成要素が複数のスロットを画定する、[30]記載のx弁。
[32]該スロットが互いに交差する、[31]記載のx弁。
[33]該支持層が、周辺リング、および該周辺リングから該スロットの交差の近位の点へと伸長する複数のアームを含む、[32]記載のx弁。
[34]該支持層がニチノールを含む、[33]記載のx弁。
[35]該スロットが異なる角度で交差する、[34]記載のx弁。
[36]該スロットの全てが同じ角度で交差する、[35]記載のx弁。
[37]該x弁が複数の密封層を含み、それぞれの密封層が少なくとも1つのスロットを含み、該密封層のスロットが実質的に直線に整列される、[33]記載のx弁。
[38]該x弁が複数の密封層を含み、それぞれの密封層が少なくとも1つのスロットを含み、該密封層のスロットが互いにずれる、[33]記載のx弁。
[39]該x弁が、互いに隣接する少なくとも2つの密封構成要素を含み、該密封構成要素のそれぞれが、少なくとも1つのスロットを画定し、該密封構成要素が、該支持層により分けられる、[33]記載のx弁。
[40]それぞれの密封構成要素の交差スロットが、互いにずれる、[39]記載のx弁。
[41]それぞれの交差スロットが、それぞれの密封構成要素のスロットの交差の角度の2分の1だけ互いにずれる、[40]記載のx弁。
[42]それぞれの密封構成要素が、直角に交差する一組のスロットを有する、[41]記載のx弁。
[43]該密封構成要素が、シリコーン、ウレタン、ゴムおよびラテックスからなる群より選択される少なくとも1つの材料を含む、[30]記載のx弁。
[44]該支持層がニチノールを含む、[43]記載のx弁。
[45]a) i 遠位グリップ、および
ii 該遠位グリップの1つの端から伸長するハンドル体
を含むハンドル、該ハンドルは、該遠位グリップおよび該ハンドル体の全長の一部に沿って、導管および溝(track)を画定する;
b) 該溝内の内部リードスクリューアセンブリ、該内部リードスクリューアセンブリは、導管の主軸に沿って可動であり、かつ該溝を通って伸長するねじ部を含む;
c) 該ハンドル体の周囲に伸長し、かつ該内部リードスクリューアセンブリのねじ部を通すように(threadably)嵌合するリードスクリューナット、ここで、該リードスクリューナットが該遠位グリップと隣接しながら回転することにより、該ハンドルに対する該内部リードスクリューアセンブリの移動が生じ、該リードスクリューナットは同時に、該内部リードスクリューアセンブリと嵌合しながらハンドル体に沿ってスライド可能であり、それにより該ハンドルに対する該内部リードスクリューの移動を生じるための少なくとも2つの機構がもたらされる;
d) 該ハンドル体に固定された支持部材;
e) 該支持部材の一部の周囲に伸長し、かつ該内部リードスクリューアセンブリに固定されたシース、ここで、該ハンドル体および該リードスクリューアセンブリの相対的な移動により、該支持部材およびシースの相対的な移動が生じ、該支持部材は、ハイポチューブ(hypo-tube)および該ハイポチューブ内の支持チューブを含み、該ハイポチューブは、該ハンドル体に固定され、該内部リードスクリューアセンブリは、該ハンドルと本質的に同軸上にある開口を画定し、該支持部材は、該内部リードスクリューを通って伸長する;ならびに
f) 該支持部材の周囲にあり、かつ該シースと内部リードスクリューアセンブリの間にある止血弁、該止血弁は、ステントグラフト送達システムの主長手軸に沿って、遠位端および近位端を有するガスケットを含み、かつ該ガスケットの遠位端と、該ガスケットの近位端の間に内部導管を画定し、該内部導管を通って支持部材が伸長し、該止血弁の作動により該支持部材の周囲の内部導管が狭くなり、それにより該止血弁が閉じられる、
を含む、ステントグラフト送達システム。
[46]該止血弁が、
a) 近位端および遠位端を有する長手方向弁ハウジング、ここで、該ガスケットは、該ハウジング内にあり、該ガスケットの遠位端は、該長手方向弁ハウジングに固定される;
b) 該長手方向弁ハウジングの近位端にあり、かつ該ガスケットの近位端に連結されたグリップアセンブリ、該グリップアセンブリは、該長手方向弁ハウジングに対して回転可能であり、該グリップアセンブリは、
i) 該長手方向弁ハウジングの第1の端のグリップ、
ii) 該グリップに固定され、かつ該グリップから該長手方向弁ハウジングの導管へと伸長するスピンドル、該スピンドルは、該ガスケットの近位端で該ガスケットに固定される、
iii) 該スピンドルの周囲に伸長し、かつ該スピンドルに固定される歯車、該歯車は、該スピンドルの周囲に沿って伸長する歯車の末端に歯を画定し、該歯車は、長手方向弁ハウジングに対する方向で、かつ該長手方向弁ハウジングの主長手軸に沿ってバイアスとされる、
を含む;ならびに
c) 該歯車の歯に干渉する、該長手方向弁ハウジング内の干渉要素、該干渉要素に対して、該歯車の歯はバイアスとされる、
をさらに含み、
ここで該長手方向弁ハウジングに対する該グリップの回転により、該ガスケットの遠位端に対するガスケットの近位端の回転が生じ、それにより、該内部導管の内径が変化し、該ハウジングに対する該グリップの回転により、該歯車の歯が、歯車を有する該干渉要素と分離および再嵌合され、該歯車と該干渉要素の再嵌合により、該長手方向弁ハウジングに対するグリップの回転の終結の際に、該ガスケットの内部導管の直径が定位置にロックされる、
[45]記載のステントグラフト送達システム。
[47]該歯車にばねをさらに含み、かつ該スピンドルの周囲に伸長する、ステントグラフト送達システムであって、該ばねは、該長手方向弁ハウジングおよび該歯車と隣接し、それにより該長手方向弁ハウジングに対する方向において該歯車がバイアスになり、該ばねは、該長手方向弁ハウジングの導管に沿って該歯車の歯を進ませる、[46]記載のステントグラフト送達システム。
[48]該ガスケットが、該ガスケットを通って伸長するカテーテルの周囲に適合する、[47]記載のステントグラフト送達システム。
[49]該ガスケットがシリコーンを含む、[48]記載のステントグラフト送達システム。
[50]x弁をさらに含み、該x弁が、少なくとも1つのスロットを画定する少なくとも1つの密封構成要素、および該密封構成要素に少なくとも部分的に埋めこまれる支持層を含み、該x弁が、該止血弁の遠位端および該ガスケットの遠位に配置される、[46]記載のステントグラフト送達システム。
[51]該密封構成要素が、交差する少なくとも2つのスロットを画定し、該支持層が、周辺リング、および該周辺リングから該スロットの交差の近位の点へと伸長する複数のアームを含む、[50]記載のステントグラフト送達システム。
[52]該密封構成要素が、互いに隣接する少なくとも2つの密封層を含み、該密封層が、それぞれ、少なくとも1つのスロットを画定し、該密封層が、該支持層により、少なくとも部分的に分けられる、[51]記載のステントグラフト送達システム。
[53]それぞれの密封層が、少なくとも2つの交差するスロットを含み、それぞれの密封層のスロットが、同じ角度で交差する、[52]記載のステントグラフト送達システム。
[54]それぞれの密封層のスロットが、互いに、実質的に直線に整列される、[53]記載のステントグラフト送達システム。
[55]それぞれの密封層の交差スロットが、互いにずれる、[53]記載のステントグラフト送達システム。
[56]それぞれの交差スロットが、それぞれの密封層のスロットの交差の角度の2分の1だけ互いにずれる、[55]記載のステントグラフト送達システム。
[57]それぞれの密封層が、直角で交差する一組のスロットを有する、[52]記載のステントグラフト送達システム。
[58]該密封構成要素が、シリコーン、ウレタンおよびラテックスからなる群より選択される少なくとも1つの材料を含む、[50]記載のステントグラフト送達システム。
[59]該支持層がニチノールを含む、[58]記載のステントグラフト送達システム。
[60]該x弁が収容される主要ボスをさらに含む、[59]記載のステントグラフト送達システム。
[61]ワイパーアセンブリをさらに含み、該ワイパーアセンブリが、ワイパーガスケット、Oリングスペーサーおよびガスケットスペーサーを含み、該Oリングスペーサーおよびガスケットスペーサーが、該ワイパーガスケットを固定し、該ワイパーアセンブリが主要ボスに隣接する、[51]記載のステントグラフト送達システム。
[62]ロールピンをさらに含み、該ワイパーアセンブリが、該ロールピンにより主要ボスに固定される、[61]記載のステントグラフト送達システム。
[63]a) i 遠位グリップ、および
ii 該遠位グリップの一端から伸長するハンドル体
を含むハンドル、該ハンドルは、該遠位グリップおよび該ハンドル体の全長の一部に沿って、導管および溝を画定する;
b) 該溝内の内部リードスクリューアセンブリ、該内部リードスクリューアセンブリは、該導管の主軸に沿って可動であり、かつ該溝を通って伸長するねじ部を含む;
c) 該ハンドル体の周囲に伸長し、かつ該内部リードスクリューアセンブリのねじ部を通すように嵌合されるリードスクリューナット、ここで、該リードスクリューナットが遠位グリップに隣接しながら回転することにより、該ハンドルに対する内部リードスクリューアセンブリの移動が生じ、該リードスクリューナットは同時に、該内部リードスクリューアセンブリと嵌合しながら、該ハンドル体に沿ってスライド可能であり、それにより、該ハンドルに対する該内部リードスクリューの移動を生じさせるための少なくとも2つの機構がもたらされる;
d) 該ハンドル体に固定された支持部材;
e) 該支持部材の一部の周囲に伸長し、かつ該内部リードスクリューアセンブリに固定されるシース、ここで、該ハンドル体および該リードスクリューアセンブリの相対的な移動は、該支持部材および該シースの相対的な移動を生じ、該支持部材は、ハイポチューブおよび該ハイポチューブ内の支持チューブを含み、該ハイポチューブは、該ハンドル体に固定され、該内部リードスクリューアセンブリは、該ハンドルと本質的に同軸上にある開口を画定し、該支持部材は、該内部リードスクリューを通って伸長する;ならびに
f) 該支持部材の周囲にあり、かつ該シースと該内部リードスクリューアセンブリの間にある止血弁
を含み、該止血弁は、該送達システムの長手軸に沿ってx弁を含み、該x弁は、交差スロットを画定する少なくとも一組の密封層および該密封層を分ける支持層を含む、ステントグラフト送達システム。