JP6808655B2 - Surgical end effector with double cam actuated jaw closure mechanism - Google Patents
Surgical end effector with double cam actuated jaw closure mechanism Download PDFInfo
- Publication number
- JP6808655B2 JP6808655B2 JP2017565230A JP2017565230A JP6808655B2 JP 6808655 B2 JP6808655 B2 JP 6808655B2 JP 2017565230 A JP2017565230 A JP 2017565230A JP 2017565230 A JP2017565230 A JP 2017565230A JP 6808655 B2 JP6808655 B2 JP 6808655B2
- Authority
- JP
- Japan
- Prior art keywords
- joint
- end effector
- distal
- jaw
- proximal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000012636 effector Substances 0.000 title claims description 578
- 230000007246 mechanism Effects 0.000 title description 5
- 230000033001 locomotion Effects 0.000 claims description 416
- 238000005520 cutting process Methods 0.000 claims description 18
- 238000010304 firing Methods 0.000 description 286
- 206010061258 Joint lock Diseases 0.000 description 57
- 230000006835 compression Effects 0.000 description 38
- 238000007906 compression Methods 0.000 description 38
- 238000000034 method Methods 0.000 description 25
- 230000004044 response Effects 0.000 description 19
- 230000000712 assembly Effects 0.000 description 17
- 238000000429 assembly Methods 0.000 description 17
- 210000002105 tongue Anatomy 0.000 description 16
- 230000007935 neutral effect Effects 0.000 description 10
- 230000036961 partial effect Effects 0.000 description 10
- 230000004913 activation Effects 0.000 description 9
- 230000009977 dual effect Effects 0.000 description 8
- 238000001356 surgical procedure Methods 0.000 description 8
- 239000004020 conductor Substances 0.000 description 7
- 239000003795 chemical substances by application Substances 0.000 description 5
- 210000000078 claw Anatomy 0.000 description 5
- 238000009826 distribution Methods 0.000 description 5
- 230000003993 interaction Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 239000000203 mixture Substances 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 229910001220 stainless steel Inorganic materials 0.000 description 5
- 239000010935 stainless steel Substances 0.000 description 5
- ABDDQTDRAHXHOC-QMMMGPOBSA-N 1-[(7s)-5,7-dihydro-4h-thieno[2,3-c]pyran-7-yl]-n-methylmethanamine Chemical compound CNC[C@@H]1OCCC2=C1SC=C2 ABDDQTDRAHXHOC-QMMMGPOBSA-N 0.000 description 4
- 230000005355 Hall effect Effects 0.000 description 4
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 4
- 210000001124 body fluid Anatomy 0.000 description 4
- 239000010839 body fluid Substances 0.000 description 4
- 238000004891 communication Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 239000010936 titanium Substances 0.000 description 4
- 229910052719 titanium Inorganic materials 0.000 description 4
- 238000013519 translation Methods 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- CYJRNFFLTBEQSQ-UHFFFAOYSA-N 8-(3-methyl-1-benzothiophen-5-yl)-N-(4-methylsulfonylpyridin-3-yl)quinoxalin-6-amine Chemical compound CS(=O)(=O)C1=C(C=NC=C1)NC=1C=C2N=CC=NC2=C(C=1)C=1C=CC2=C(C(=CS2)C)C=1 CYJRNFFLTBEQSQ-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- MHAJPDPJQMAIIY-UHFFFAOYSA-N Hydrogen peroxide Chemical compound OO MHAJPDPJQMAIIY-UHFFFAOYSA-N 0.000 description 2
- 229910000639 Spring steel Inorganic materials 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- 229920006362 Teflon® Polymers 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000002146 bilateral effect Effects 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000026058 directional locomotion Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 230000000670 limiting effect Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 230000001954 sterilising effect Effects 0.000 description 2
- 238000004659 sterilization and disinfection Methods 0.000 description 2
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 239000010937 tungsten Substances 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- VCGRFBXVSFAGGA-UHFFFAOYSA-N (1,1-dioxo-1,4-thiazinan-4-yl)-[6-[[3-(4-fluorophenyl)-5-methyl-1,2-oxazol-4-yl]methoxy]pyridin-3-yl]methanone Chemical compound CC=1ON=C(C=2C=CC(F)=CC=2)C=1COC(N=C1)=CC=C1C(=O)N1CCS(=O)(=O)CC1 VCGRFBXVSFAGGA-UHFFFAOYSA-N 0.000 description 1
- WNEODWDFDXWOLU-QHCPKHFHSA-N 3-[3-(hydroxymethyl)-4-[1-methyl-5-[[5-[(2s)-2-methyl-4-(oxetan-3-yl)piperazin-1-yl]pyridin-2-yl]amino]-6-oxopyridin-3-yl]pyridin-2-yl]-7,7-dimethyl-1,2,6,8-tetrahydrocyclopenta[3,4]pyrrolo[3,5-b]pyrazin-4-one Chemical compound C([C@@H](N(CC1)C=2C=NC(NC=3C(N(C)C=C(C=3)C=3C(=C(N4C(C5=CC=6CC(C)(C)CC=6N5CC4)=O)N=CC=3)CO)=O)=CC=2)C)N1C1COC1 WNEODWDFDXWOLU-QHCPKHFHSA-N 0.000 description 1
- 241000132092 Aster Species 0.000 description 1
- 241000894006 Bacteria Species 0.000 description 1
- 206010011906 Death Diseases 0.000 description 1
- IAYPIBMASNFSPL-UHFFFAOYSA-N Ethylene oxide Chemical compound C1CO1 IAYPIBMASNFSPL-UHFFFAOYSA-N 0.000 description 1
- 229920000106 Liquid crystal polymer Polymers 0.000 description 1
- 239000004977 Liquid-crystal polymers (LCPs) Substances 0.000 description 1
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 241001274660 Modulus Species 0.000 description 1
- AYCPARAPKDAOEN-LJQANCHMSA-N N-[(1S)-2-(dimethylamino)-1-phenylethyl]-6,6-dimethyl-3-[(2-methyl-4-thieno[3,2-d]pyrimidinyl)amino]-1,4-dihydropyrrolo[3,4-c]pyrazole-5-carboxamide Chemical compound C1([C@H](NC(=O)N2C(C=3NN=C(NC=4C=5SC=CC=5N=C(C)N=4)C=3C2)(C)C)CN(C)C)=CC=CC=C1 AYCPARAPKDAOEN-LJQANCHMSA-N 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 235000002597 Solanum melongena Nutrition 0.000 description 1
- 244000061458 Solanum melongena Species 0.000 description 1
- 239000004775 Tyvek Substances 0.000 description 1
- 229920000690 Tyvek Polymers 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 239000004676 acrylonitrile butadiene styrene Substances 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000005250 beta ray Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 238000002788 crimping Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 229920001746 electroactive polymer Polymers 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000005251 gamma ray Effects 0.000 description 1
- 230000002439 hemostatic effect Effects 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012830 laparoscopic surgical procedure Methods 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 230000000877 morphologic effect Effects 0.000 description 1
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 238000002355 open surgical procedure Methods 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Chemical compound O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images


























































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07207—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously the staples being applied sequentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/10—Surgical instruments, devices or methods, e.g. tourniquets for applying or removing wound clamps, e.g. containing only one clamp or staple; Wound clamp magazines
- A61B17/105—Wound clamp magazines
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Description
本発明は、外科用器具に関し、様々な実施形態では、外科用ステープル留め及び切断器具、並びにそれと共に使用するステープルカートリッジに関する。 The present invention relates to surgical instruments and, in various embodiments, to surgical staple fastening and cutting instruments, and staple cartridges used with them.
ステープル留め器具は、一対の協働する細長い顎部材を含むことができ、各顎部材が患者の中に挿入され、ステープル留め及び/又は切開される組織に対して位置付けられるように適合させることができる。様々な実施形態では、顎部材のうちの一方は、横方向に離隔された少なくとも2列のステープルを中に収容したステープルカートリッジを支持することができ、他方の顎部材は、ステープルカートリッジ内のステープル列と位置合わせされたステープル形成ポケットを有するアンビルを支持することができる。概して、ステープル留め器具は更に、顎部材に対して摺動可能な押し込みバー及びナイフブレードを含んで、押し込みバー上のカム面、及び/又は押し込みバーによって押し込まれるウェッジスレッド上のカム面を介して、ステープルカートリッジからステープルを連続的に排出することができる。少なくとも1つの実施形態では、ステープルをアンビルに対して押し込み、顎部材の間で把持された組織内に変形したステープルの横方向に離隔された列を形成するために、カートリッジによって保持され、ステープルと関連付けられた複数のステープルドライバを作動させるように、カム面を形成することができる。少なくとも1つの実施形態では、ナイフブレードはカム面に追従し、ステープル列間の線に沿って組織を切断することができる。 Staple fasteners can include a pair of cooperating elongated jaw members, each jaw member being inserted into the patient and adapted to be positioned with respect to the tissue to be stapled and / or incised. it can. In various embodiments, one of the jaw members can support a staple cartridge containing at least two rows of laterally spaced staples, and the other jaw member is a staple in the staple cartridge. Anvils with stapled pockets aligned with the rows can be supported. In general, staple fasteners further include a push bar and knife blade that are slidable with respect to the jaw member, via a cam surface on the push bar and / or a cam surface on the wedge thread that is pushed by the push bar. , Staples can be continuously ejected from the staple cartridge. In at least one embodiment, the staples are pushed against the anvil and held by a cartridge to form laterally isolated rows of deformed staples within the tissue gripped between the jaw members, with the staples. A cam surface can be formed to actuate a plurality of associated staple drivers. In at least one embodiment, the knife blade can follow the cam surface and cut tissue along the lines between the staple rows.
上述の議論は、当時の本発明の分野における関連技術の様々な態様を説明することのみを意図したものであり、特許請求の範囲を否定するものとみなされるべきではない。 The above discussion is intended only to explain various aspects of the art in the field of the invention at the time and should not be regarded as denying the claims.
本明細書に記載する実施形態の様々な特徴は、それらの利点と共に、以下のような添付図面と併せて以下の説明によって理解することができる。
複数の図面を通して、対応する参照符号は対応する部材を示す。本明細書に記載される例示は、本発明の様々な実施形態を1つの形態で例示するものであり、かかる例示は、いかなる方法によっても本発明の範囲を限定するものとして解釈されるべきではない。 Throughout the drawings, the corresponding reference numerals indicate the corresponding members. The illustrations described herein illustrate various embodiments of the invention in one form, and such illustrations should be construed as limiting the scope of the invention in any way. Absent.
本願の出願人は、本願と同日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第______号、発明の名称「SURGICAL END EFFECTORS WITH POSITIVE JAW OPENING ARRANGEMENTS」、代理人整理番号END7675USNP/150110、
−米国特許出願第______号、発明の名称「SURGICAL STAPLING INSTRUMENTS WITH LOCKOUT ARRANGEMENTS FOR PREVENTING FIRING SYSTEM ACTUATION WHEN A CARTRIDGE IS SPENT OR MISSING」、代理人整理番号第END7676USNP/150111号、
−米国特許出願第______号、発明の名称「MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS」、代理人整理番号第END7674USNP/150109号、
−米国特許出願第______号、発明の名称「ARTICULATABLE SURGICAL INSTRUMENTS WITH COMPOSITE FIRING BEAM STRUCTURES WITH CENTER FIRING SUPPORT MEMBER FOR ARTICULATION SUPPORT」、代理人整理番号第END7673USNP/150108、
−米国特許出願第______号、発明の名称「DUAL ARTICULATION DRIVE SYSTEM ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS」、代理人整理番号第END7672USNP/150107号、及び
−米国特許出願第______号、発明の名称「PUSH/PULL ARTICULATION DRIVE SYSTEMS FOR ARTICULATABLE SURGICAL INSTRUMENTS」、代理人整理番号第END7671USNP/150106号。
The applicant of the present application owns the following patent applications filed on the same date as the present application, the entire contents of which are incorporated herein by reference:
-US Patent Application No. _____, title of invention "SURGICAL END EFFECTORS WITH POSITIVE JAW OPENING ARRANGEMENTS", agent reference number END7675USNP / 150110,
-US Patent Application No. ________, Invention Name "SURGICAL STAPLING INSTRUMENTS WITH LOCKOUT ARRANGEMENTS FOR PREVENTING FIRING SYSTEM ACTUTION WHEN A CARTRIGENS
-US Patent Application No. ________, Invention Title "MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS", Agent Reference No. END7674USNP / 150109,
-US Patent Application No. ________, Invention Name "ARTICULATABLE SURGICAL INSTRUMENTS WITH COMPOSITE FIRING BEAM STRUCTURES WITH CENTER FIRING SUPPORT MEMBER FOR7
-US Patent Application No. ________, Invention Title "DUAL ARTICULATION DRIVE SYSTEM ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS", Agent Reference Number END7672USNP / PU_AUT / 150107, U.S. Pat. DRIVE SYSTEMS FOR ARTICULATABLE SURGICAL INSTRUMENTS ", agent reference number END7671USNP / 150106.
本願の出願人は、2015年3月6日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第14/640,746号、発明の名称「POWERED SURGICAL INSTRUMENT」、
−米国特許出願第14/640,795号、発明の名称「MULTIPLE LEVEL THRESHOLDS TO MODIFY OPERATION OF POWERED SURGICAL INSTRUMENTS」、
−米国特許出願第14/640,832号、発明の名称「ADAPTIVE TISSUE COMPRESSION TECHNIQUES TO ADJUST CLOSURE RATES FOR MULTIPLE TISSUE TYPES」、代理人整理番号第END7557USNP/140482号、
−米国特許出願第14/640,935号、発明の名称「OVERLAID MULTI SENSOR RADIO FREQUENCY(RF)ELECTRODE SYSTEM TO MEASURE TISSUE COMPRESSION」、
−米国特許出願第14/640,831号、発明の名称「MONITORING SPEED CONTROL AND PRECISION INCREMENTING OF MOTOR FOR POWERED SURGICAL INSTRUMENTS」、
−米国特許出願第14/640,859号、発明の名称「TIME DEPENDENT EVALUATION OF SENSOR DATA TO DETERMINE STABILITY,CREEP,AND VISCOELASTIC ELEMENTS OF MEASURES」、
−米国特許出願第14/640,817号、発明の名称「INTERACTIVE FEEDBACK SYSTEM FOR POWERED SURGICAL INSTRUMENTS」、
−米国特許出願第14/640,844号、発明の名称「CONTROL TECHNIQUES AND SUB−PROCESSOR CONTAINED WITHIN MODULAR SHAFT WITH SELECT CONTROL PROCESSING FROM HANDLE」、
−米国特許出願第14/640,837号、発明の名称「SMART SENSORS WITH LOCAL SIGNAL PROCESSING」、
−米国特許出願第14/640,765号、発明の名称「SYSTEM FOR DETECTING THE MIS−INSERTION OF A STAPLE CARTRIDGE INTO A SURGICAL STAPLER」、
−米国特許出願第14/640,799号、発明の名称「SIGNAL AND POWER COMMUNICATION SYSTEM POSITIONED ON A ROTATABLE SHAFT」、及び
−米国特許出願第14/640,780号、発明の名称「SURGICAL INSTRUMENT COMPRISING A LOCKABLE BATTERY HOUSING」。
The applicant of the present application owns the following patent applications filed on March 6, 2015, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 14 / 640,746, Invention Name "POWERED SURGICAL INSTRUMENT",
-US Patent Application No. 14 / 640,795, Title of Invention "MULTIPLE LEVEL THRESHOLDS TO MODEIFY OPERATION OF POWERED SURGICAL INSTRUMENTS",
-US Patent Application No. 14 / 640,832, Invention Title "ADAPTIVE TISSUE COMPRESSION TECHNIQUES TO ADJUST CLOSURE RATES FOR MULTIPLE TISSUE TYPES", Agent Reference No. END7557USNP / 140
-US Patent Application No. 14 / 640,935, title of invention "OVERLAID MULTI SENSOR RADIO FREQUENCY (RF) ELECTRODE SYSTEM TO MEASURE TISSUE COMPRESSION",
-US Patent Application No. 14 / 640,831, Title of Invention "MONITORING SPEED CONTROLL AND PRECISION INCREMENTING OF MOTOR FOR FOR POWERED SURGICAL INSTRUMENTS",
-US Patent Application No. 14 / 640,859, title of invention "TIME DEPENDENT EVALUATION OF SENSOR DATA TO DETERMINE STABILITY, CREEP, AND VISCOELASTIC ELEMENTS OF MEASURES",.
-US Patent Application No. 14 / 640,817, Title of Invention "INTERACTIVE FEEDBACK SYSTEM FOR POWERED SURGICAL INSTRUMENTS",
-US Patent Application No. 14 / 640,844, Title of Invention "CONTROLL TECHNIQUES AND SUB-PROCESSOR CONTROL WITHIN MODULAR SHAFT WITH SELECT CONTROLL PROCESSING FROM HANDLE",
-US Patent Application No. 14 / 640,837, Invention Title "SMART SENSORS WITH LOCAL SIGNAL PROCESSING",
-US Patent Application No. 14 / 640,765, Title of Invention "SYSTEM FOR DETECTING THE MIS-INSERTION OF A STAPLE CARTRIDGE INTO A SURGICAL STAPLER",
-US Patent Application No. 14 / 640,799, title of invention "SIGNAL AND POWER COMMUNICATION SYSTEM POSITIONED ON A ROTATABLE SHAFT", and-US Patent Application No. 14 / 640,780, title of invention "SURGICAL INSTRUME" BATTERY HOUSING ".
本願の出願人は、2015年2月27日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第14/633,576号、発明の名称「SURGICAL INSTRUMENT SYSTEM COMPRISING AN INSPECTION STATION」、
−米国特許出願第14/633,546号、発明の名称「SURGICAL APPARATUS CONFIGURED TO ASSESS WHETHER A PERFORMANCE PARAMETER OF THE SURGICAL APPARATUS IS WITHIN AN ACCEPTABLE PERFORMANCE BAND」、
−米国特許出願第14/633,576号、発明の名称「SURGICAL CHARGING SYSTEM THAT CHARGES AND/OR CONDITIONS ONE OR MORE BATTERIES」、
−米国特許出願第14/633,566号、発明の名称「CHARGING SYSTEM THAT ENABLES EMERGENCY RESOLUTIONS FOR CHARGING A BATTERY」、
−米国特許出願第14/633,555号、発明の名称「SYSTEM FOR MONITORING WHETHER A SURGICAL INSTRUMENT NEEDS TO BE SERVICED」、
−米国特許出願第14/633,542号、発明の名称「REINFORCED BATTERY FOR A SURGICAL INSTRUMENT」、
−米国特許出願第14/633,548号、発明の名称「POWER ADAPTER FOR A SURGICAL INSTRUMENT」、
−米国特許出願第14/633,526号、発明の名称「ADAPTABLE SURGICAL INSTRUMENT HANDLE」、
−米国特許出願第14/633,541号、発明の名称「MODULAR STAPLING ASSEMBLY」、及び
−米国特許出願第14/633,562号、発明の名称「SURGICAL APPARATUS CONFIGURED TO TRACK AN END−OF−LIFE PARAMETER」。
The applicant of the present application owns the following patent applications filed on February 27, 2015, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 14 / 633,576, Invention Title "SURGICAL INSTRUMENT SYSTEM COMPRISING AN INSTECTION STATION",
-US Patent Application No. 14 / 633,546, title of invention "SURGICAL APPARATUS CONFIGURED TO ASSESS WHERETER A PERFORMANCE PARAMETER OF THE SURGICAL APPARATUS IS WITHIN ANCE"
-US Patent Application No. 14 / 633,576, title of invention "SURGICAL CHARGING SYSTEM THAT CHARGES AND / OR CONDITIONS ONE OR MORE BATTERIES",
-US Patent Application No. 14 / 633,566, Invention Title "CHARGING SYSTEM THAT ENABLES EMERGENCY RESOLUTIONS FOR CHARGING A BATTERY",
-US Patent Application No. 14 / 633,555, Title of Invention "SYSTEM FOR MONITORING WHERTHER A SURGICAL INSTRUMENT NEEDS TO BE SERVICED",
-US Patent Application No. 14 / 633,542, Title of Invention "REINFORCED BATTERY FOR A SURGICAL INSTRUMENT",
-US Patent Application No. 14 / 633,548, Title of Invention "POWER ADAPTER FOR A SURGICAL INSTRUMENT",
-US Patent Application No. 14 / 633,526, title of invention "ADAPTABLE SURGICAL INSTRUMENT HANDLE",
-US Patent Application No. 14 / 633,541, Invention Name "MODULAR STAPLING ASSEMBLY", and-US Patent Application No. 14 / 633,562, Invention Name "SURGICAL APPARATUS CONFIGURED TO TRACK AN END-OF-LIFE PARAMETER"".
本願の出願人は、2014年12月18日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第14/574,478号、発明の名称「SURGICAL INSTRUMENT SYSTEMS COMPRISING AN ARTICULATABLE END EFFECTOR AND MEANS FOR ADJUSTING THE FIRING STROKE OF A FIRING」、
−米国特許出願第14/574,483号、発明の名称「SURGICAL INSTRUMENT ASSEMBLY COMPRISING LOCKABLE SYSTEMS」、
−米国特許出願第14/575,139号、発明の名称「DRIVE ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS」、
−米国特許出願第14/575,148号、発明の名称「LOCKING ARRANGEMENTS FOR DETACHABLE SHAFT ASSEMBLIES WITH ARTICULATABLE SURGICAL END EFFECTORS」、
−米国特許出願第14/575,130号、発明の名称「SURGICAL INSTRUMENT WITH AN ANVIL THAT IS SELECTIVELY MOVABLE ABOUT A DISCRETE NON−MOVABLE AXIS RELATIVE TO A STAPLE CARTRIDGE」、
−米国特許出願第14/575,143号、発明の名称「SURGICAL INSTRUMENTS WITH IMPROVED CLOSURE ARRANGEMENTS」、
−米国特許出願第14/575,117号、発明の名称「SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS」、
−米国特許出願第14/575,154号、発明の名称「SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND IMPROVED FIRING BEAM SUPPORT ARRANGEMENTS」、
−米国特許出願第14/574,493号、発明の名称「SURGICAL INSTRUMENT ASSEMBLY COMPRISING A FLEXIBLE ARTICULATION SYSTEM」、及び
−米国特許出願第14/574,500号、発明の名称「SURGICAL INSTRUMENT ASSEMBLY COMPRISING A LOCKABLE ARTICULATION SYSTEM」。
The applicant of the present application owns the following patent applications filed on December 18, 2014, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 14 / 574,478, title of invention "SURGICAL INSTRUMENT SYSTEMS COMPRISING AN ARTICULATABLE END EFFECTOR AND MEANS FOR ADJUSTING THE FIRING STROKE OF"
-US Patent Application No. 14 / 574,483, Invention Title "SURGICAL INSTRUMENT ASSEMBLY COMPRISING LOCKABLE SYSTEMS",
-US Patent Application No. 14 / 575,139, Title of Invention "DRIVE ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS",
-US Patent Application No. 14 / 575,148, Title of Invention "LOCKING ARRANGEMENTS FOR DETACHABLE SHAFT ASSEMBLES WITH ARTICULATABLE SURGICAL END EFFECTORS",
-US Patent Application No. 14 / 575,130, title of the invention "SURGICAL INSTRUMENT WITH AN ANVIL THAT IS SELECTIVELY MOVABLE ABOUT A DISCRETE NON-MOVABLE AXIS RELATET ASTER"
-US Patent Application No. 14 / 575,143, Invention Title "SURGICAL INSTRUMENTS WITH IMPROVEED CLOSE ARRANGEMENTS",
-US Patent Application No. 14 / 575,117, title of invention "SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS",
-US Patent Application No. 14 / 575,154, Title of Invention "SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND IMPROVEED FIRING BEAM SUPPORT ARRANGEMENTS",
-US Patent Application No. 14 / 574,493, title of invention "SURGICAL INSTRUMENT ASSEMBLY COMPRISING A FLEXIBLE ARTICULATION SYSTEM", and-US Patent Application No. 14 / 574,500, title of invention "SURGICAL INSTLUMENT SYSTEM ".
本願の出願人は、2013年3月1日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第13/782,295号、発明の名称「Articulatable Surgical Instruments With Conductive Pathways For Signal Communication」、現在は米国特許出願公開第2014/0246471号、
−米国特許出願第13/782,323号、発明の名称「Rotary Powered Articulation Joints For Surgical Instruments」、現在は米国特許出願公開第2014/0246472号、
−米国特許出願第13/782,338号、発明の名称「Thumbwheel Switch Arrangements For Surgical Instruments」、現在は米国特許出願公開第2014/0249557号、
−米国特許出願第13/782,499号、発明の名称「Electromechanical Surgical Device with Signal Relay Arrangement」、現在は米国特許出願公開第2014/0246474号、
−米国特許出願第13/782,460号、発明の名称「Multiple Processor Motor Control for Modular Surgical Instruments」、現在は米国特許出願公開第2014/0246478号、
−米国特許出願第13/782,358号、発明の名称「Joystick Switch Assemblies For Surgical Instruments」、現在は米国特許出願公開第2014/0246477号、
−米国特許出願第13/782,481号、発明の名称「Sensor Straightened End Effector During Removal Through Trocar」、現在は米国特許出願公開第2014/0246479号、
−米国特許出願第13/782,518号、発明の名称「Control Methods for Surgical Instruments with Removable Implement Portions」、現在は米国特許出願公開第2014/0246475号、
−米国特許出願第13/782,375号、発明の名称「Rotary Powered Surgical Instruments With Multiple Degrees of Freedom」、現在は米国特許出願公開第2014/0246473号、及び、
−米国特許出願第13/782,536号、発明の名称「Surgical Instrument Soft Stop」、現在は米国特許出願公開第2014/0246476号。
The applicant of the present application owns the following patent applications filed on March 1, 2013, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 13 / 782,295, Invention Title "Artificial Surgical Instruments With Conductive Pathways For Signal Communication", now US Patent Application Publication No. 2014/0246471,
-US Patent Application No. 13 / 782,323, Invention Title "Rotary Powered Articulation Joints For Surgical Instruments", now US Patent Application Publication No. 2014/0246472,
-US Patent Application No. 13 / 782,338, Invention Title "Thumbwheel Switch Arrangements For Surgical Instruments", Currently US Patent Application Publication No. 2014/0249557,
-US Patent Application No. 13 / 782,499, Title of Invention "Electromechanical Device with Signal Relay Arrangement", now US Patent Application Publication No. 2014/0246474,
-US Patent Application No. 13 / 782,460, Invention Title "Multiple Procedure Motor Control for Modular Surgical Instruments", now US Patent Application Publication No. 2014/0246478,
-US Patent Application No. 13 / 782,358, Invention Title "Joystick Switch Assemblies For Surgical Instruments", now US Patent Application Publication No. 2014/0246477,
-US Patent Application No. 13 / 782,481, Invention Title "Sensor Straightened End Effector During Removal Through Trocar", now US Patent Application Publication No. 2014/0246479,
-US Patent Application No. 13 / 782,518, Invention Title "Control Methods for Surgical Instruments with Removable Implementation Parts", now US Patent Application Publication No. 2014/0246475,
-US Patent Application No. 13 / 782,375, title of invention "Rotary Powered Surgical Instruments With Multiple Degrees of Freedom", now US Patent Application Publication No. 2014/0246473, and
-US Patent Application No. 13 / 782,536, title of invention "Surgical Instrument Soft Stop", now US Patent Application Publication No. 2014/0246476.
本願の出願人はまた、2013年3月14日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第13/803,097号、発明の名称「ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE」、現在は米国特許出願公開第2014/0263542号、
−米国特許出願第13/803,193号、発明の名称「CONTROL ARRANGEMENTS FOR A DRIVE MEMBER OF A SURGICAL INSTRUMENT」、現在は米国特許出願公開第2014/0263537号、
−米国特許出願第13/803,053号、発明の名称「INTERCHANGEABLE SHAFT ASSEMBLIES FOR USE WITH A SURGICAL INSTRUMENT」、現在は米国特許出願公開第2014/0263564号、
−米国特許出願第13/803,086号、発明の名称「ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK」、現在は米国特許出願公開第2014/0263541号、
−米国特許出願第13/803,210号、発明の名称「SENSOR ARRANGEMENTS FOR ABSOLUTE POSITIONING SYSTEM FOR SURGICAL INSTRUMENTS」、現在は米国特許出願公開第2014/0263538号、
−米国特許出願第13/803,148号、発明の名称「MULTI−FUNCTION MOTOR FOR A SURGICAL INSTRUMENT」、現在は米国特許出願公開第2014/0263554号、
−米国特許出願第13/803,066号、発明の名称「DRIVE SYSTEM LOCKOUT ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS」、現在は米国特許出願公開第2014/0263565号、
−米国特許出願第13/803,117号、発明の名称「ARTICULATION CONTROL SYSTEM FOR ARTICULATABLE SURGICAL INSTRUMENTS」、現在は米国特許出願公開第2014/0263553号、
−米国特許出願第13/803,130号、発明の名称「DRIVE TRAIN CONTROL ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS」、現在は米国特許出願公開第2014/0263543号、及び、
−米国特許出願第13/803,159号、発明の名称「METHOD AND SYSTEM FOR OPERATING A SURGICAL INSTRUMENT」、現在は米国特許出願公開第2014/0277017号。
The applicant of the present application also owns the following patent applications filed on March 14, 2013, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 13 / 803,097, Invention Title "ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE", Currently US Patent Application Publication No. 2014/0263542,
-US Patent Application No. 13 / 803,193, Invention Title "CONTROL ARRANGEMENTS FOR A DRIVE MEMBER OF A SURGICAL INSTRUMENT", Currently US Patent Application Publication No. 2014/0263537,
-US Patent Application No. 13 / 803,053, Invention Title "INTERCHANGE SHAFT ASSEMBLES FOR USE WITH A SURGICAL INSTRUMENT", now US Patent Application Publication No. 2014/0263564,
-US Patent Application No. 13 / 803,086, Title of Invention "ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK", Currently US Patent Application Publication No. 2014/0263541,
-US Patent Application No. 13 / 803,210, Invention Title "SENSOR ARRANGEMENTS FOR ABSOLUTE POSITIONING SYSTEM FOR SURGICAL INSTRUMENTS", now US Patent Application Publication No. 2014/0263538,
-US Patent Application No. 13 / 803,148, Invention Title "MULTI-function MOTOR FOR A SURGICAL INSTRUMENT", Currently US Patent Application Publication No. 2014/0263554,
-US Patent Application No. 13 / 803,066, Invention Title "DRIVE SYSTEM LOCKOUT ARRANGEMENTS FOR MODEDULAR SURGICAL INSTRUMENTS", now US Patent Application Publication No. 2014/0263565,
-US Patent Application No. 13 / 803,117, Invention Title "ARTICULATION CONTORL SYSTEM FOR ARTICULATABLE SURGICAL INSTRUMENTS", now US Patent Application Publication No. 2014/0263553,
-US Patent Application No. 13 / 803,130, the title of the invention "DRIVE TRAIN CONTOROL ARRANGEMENTS FOR MODELAR SURGICAL INSTRUMENTS", now US Patent Application Publication No. 2014/0263543, and
-US Patent Application No. 13 / 803,159, Invention Title "METHOD AND SYSTEM FOR OPERATING A SURGICAL INSTRUMENT", now US Patent Application Publication No. 2014/0277017.
本願の出願人はまた、2014年3月7日に出願された以下の特許出願を所有しており、その全体内容が参照により本明細書に組み込まれる:
−米国特許出願第14/200,111号、発明の名称「CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS」、現在は米国特許出願公開第2014/0263539号。
The applicant of the present application also owns the following patent application filed on March 7, 2014, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 14 / 200,111, Invention Title "CONTROLL SYSTEMS FOR SURGICAL INSTRUMENTS", now US Patent Application Publication No. 2014/0263539.
本願の出願人はまた、2014年3月26日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第14/226,106号、発明の名称「POWER MANAGEMENT CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS」、
−米国特許出願第14/226,099号、発明の名称「STERILIZATION VERIFICATION CIRCUIT」、
−米国特許出願第14/226,094号、発明の名称「VERIFICATION OF NUMBER OF BATTERY EXCHANGES/PROCEDURE COUNT」、
−米国特許出願第14/226,117号、発明の名称「POWER MANAGEMENT THROUGH SLEEP OPTIONS OF SEGMENTED CIRCUIT AND WAKE UP CONTROL」、
−米国特許出願第14/226,075号、発明の名称「MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFT ASSEMBLIES」、
−米国特許出願第14/226,093号、発明の名称「FEEDBACK ALGORITHMS FOR MANUAL BAILOUT SYSTEMS FOR SURGICAL INSTRUMENTS」、
−米国特許出願第14/226,116号、発明の名称「SURGICAL INSTRUMENT UTILIZING SENSOR ADAPTATION」、
−米国特許出願第14/226,071号、発明の名称「SURGICAL INSTRUMENT CONTROL CIRCUIT HAVING A SAFETY PROCESSOR」、
−米国特許出願第14/226,097号、発明の名称「SURGICAL INSTRUMENT COMPRISING INTERACTIVE SYSTEMS」、
−米国特許出願第14/226,126号、発明の名称「INTERFACE SYSTEMS FOR USE WITH SURGICAL INSTRUMENTS」、
−米国特許出願第14/226,133号、発明の名称「MODULAR SURGICAL INSTRUMENT SYSTEM」、
−米国特許出願第14/226,081号、発明の名称「SYSTEMS AND METHODS FOR CONTROLLING A SEGMENTED CIRCUIT」、
−米国特許出願第14/226,076号、発明の名称「POWER MANAGEMENT THROUGH SEGMENTED CIRCUIT AND VARIABLE VOLTAGE PROTECTION」、
−米国特許出願第14/226,111号、発明の名称「SURGICAL STAPLING INSTRUMENT SYSTEM」、及び、
−米国特許出願第14/226,125号、発明の名称「SURGICAL INSTRUMENT COMPRISING A ROTATABLE SHAFT」。
The applicant of the present application also owns the following patent applications filed on March 26, 2014, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 14 / 226,106, Title of Invention "POWER MANAGEMENT CONTORL SYSTEMS FOR SURGICAL INSTRUMENTS",
-US Patent Application No. 14 / 226,099, Title of Invention "STERILIZATION VERIFICATION CIRCUIT",
-US Patent Application No. 14 / 226,094, Title of Invention "VERIFICATION OF NUMBER OF BATTERY EXCHANGE COUNT",
-US Patent Application No. 14 / 226,117, Title of Invention "POWER MANAGEMENT THROUGH SLEEP OPTIONS OF SEGMENTED CIRCUIT AND WAKE UP CONTROLL",
-US Patent Application No. 14 / 226,075, Title of Invention "MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHANBLE SHAFT ASSEMBLES",
-US Patent Application No. 14 / 226,093, Title of Invention "FEEDBACK ALGORITHMS FOR MANUAL BAILOUT SYSTEMS FOR SURGICAL INSTRUMENTS",
-US Patent Application No. 14 / 226,116, Invention Title "SURGICAL INSTRUMENT UTILIZING SENSOR ADAPTATION",
-US Patent Application No. 14 / 226,071, Title of Invention "SURGICAL INSTRUMENT CONTROL CIRCUIT HAVING A SAFETY PROCESSOR",
-US Patent Application No. 14 / 226,097, Invention Title "SURGICAL INSTRUMENT COMPRISING INTERACTIVE SYSTEMS",
-US Patent Application No. 14 / 226,126, Title of Invention "INTERFACE SYSTEMS FOR USE WITH SURGICAL INSTRUMENTS",
-US Patent Application No. 14 / 226,133, Title of Invention "MODULAR SURGICAL INSTRUMENT SYSTEM",
-US Patent Application No. 14 / 226,081, Title of the Invention "SYSTEMS AND METHODS FOR CONTROLLING A SEGMENTED CIRCUIT",
-US Patent Application No. 14 / 226,076, Title of Invention "POWER MANAGEMENT THROUGH SEGMENTED CIRCUIT AND VARIABLE VOLTAGE PROTESTION",
-US Patent Application No. 14 / 226,111, the title of the invention "SURGICAL STAPLING INSTRUMENT SYSTEM", and
-US Patent Application No. 14 / 226,125, title of invention "SURGICAL INSTRUMENT COMPRISING A ROTATABLE SHAFT".
本願の出願人はまた、2014年9月5日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第14/479,103号、発明の名称「CIRCUITRY AND SENSORS FOR POWERED MEDICAL DEVICE」、
−米国特許出願第14/479,119号、発明の名称「ADJUNCT WITH INTEGRATED SENSORS TO QUANTIFY TISSUE COMPRESSION」、
−米国特許出願第14/478,908号、発明の名称「MONITORING DEVICE DEGRADATION BASED ON COMPONENT EVALUATION」、
−米国特許出願第14/478,895号、発明の名称「MULTIPLE SENSORS WITH ONE SENSOR AFFECTING A SECOND SENSOR’S OUTPUT OR INTERPRETATION」、
−米国特許出願第14/479,110号、発明の名称「USE OF POLARITY OF HALL MAGNET DETECTION TO DETECT MISLOADED CARTRIDGE」、
−米国特許出願第14/479,098号、発明の名称「SMART CARTRIDGE WAKE UP OPERATION AND DATA RETENTION」、
−米国特許出願第14/479,115号、発明の名称「MULTIPLE MOTOR CONTROL FOR POWERED MEDICAL DEVICE」、及び
−米国特許出願第14/479,108号、発明の名称「LOCAL DISPLAY OF TISSUE PARAMETER STABILIZATION」。
The applicant of the present application also owns the following patent applications filed on September 5, 2014, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 14 / 479,103, Title of Invention "CIRCUITRY AND SENSORS FOR POWERED MEDICAL DEVICE",
-US Patent Application No. 14 / 479,119, Title of Invention "ADJUNCT WITH INTEGRATED SENSORS TO QUANTIFY TISSUE COMPRESSION",
-US Patent Application No. 14 / 478,908, Invention Title "MONITORING DEVICE DEGRADATION BASED ON COMPONENT EVALUATION",
-US Patent Application No. 14 / 478,895, Title of Invention "MULTIPLE SENSORS WITH ONE SENSOR AFFECTING A SECOND SENSOR'S OUTPUT OR INTERPRETATION",
-US Patent Application No. 14 / 479,110, Title of Invention "USE OF POLARITY OF HALL MAGNET DETECTION TO DETECT MISLOADED CARTRIDGE",
-US Patent Application No. 14 / 479,098, Invention Title "SMART CARTRIDGE WAKE UP OPERATION AND DATA RETIONION",
-US Patent Application No. 14 / 479,115, Invention Name "MULTIPLE MOTOR CONTOROL FOR POWERED MEDICAL DEVICE", and-US Patent Application No. 14 / 479,108, Invention Name "LOCAL DISPLAY OF TISSUE PARAMETER STAIL".
本願の出願人はまた、2014年4月9日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国特許出願第14/248,590号、発明の名称「MOTOR DRIVEN SURGICAL INSTRUMENTS WITH LOCKABLE DUAL DRIVE SHAFTS」、現在は米国特許出願公開第2014/0305987号、
−米国特許出願第14/248,581号、発明の名称「SURGICAL INSTRUMENT COMPRISING A CLOSING DRIVE AND A FIRING DRIVE OPERATED FROM THE SAME ROTATABLE OUTPUT」、現在は米国特許出願公開第2014/0305989号、
−米国特許出願第14/248,595号、発明の名称「SURGICAL INSTRUMENT SHAFT INCLUDING SWITCHES FOR CONTROLLING THE OPERATION OF THE SURGICAL INSTRUMENT」、現在は米国特許出願公開第2014/0305988号、
−米国特許出願第14/248,588号、発明の名称「POWERED LINEAR SURGICAL STAPLER」、現在は米国特許出願公開第2014/0309666号、
−米国特許出願第14/248,591号、発明の名称「TRANSMISSION ARRANGEMENT FOR A SURGICAL INSTRUMENT」、現在は米国特許出願公開第2014/0305991号、
−米国特許出願第14/248,584号、発明の名称「MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH ALIGNMENT FEATURES FOR ALIGNING ROTARY DRIVE SHAFTS WITH SURGICAL END EFFECTOR SHAFTS」、現在は米国特許出願公開第2014/0305994号、
−米国特許出願第14/248,587号、発明の名称「POWERED SURGICAL STAPLER」、現在は米国特許出願公開第2014/0309665号、
−米国特許出願第14/248,586号、発明の名称「DRIVE SYSTEM DECOUPLING ARRANGEMENT FOR A SURGICAL INSTRUMENT」、現在は米国特許出願公開第2014/0305990号、及び、
−米国特許出願第14/248,607号、発明の名称「MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH STATUS INDICATION ARRANGEMENTS」、現在は米国特許出願公開第2014/0305992号。
The applicant of the present application also owns the following patent applications filed on April 9, 2014, the entire contents of which are incorporated herein by reference:
-US Patent Application No. 14 / 248,590, Invention Title "MOTOR DRIVEN SURGICAL INSTRUMENTS WITH LOCKABLE DUAL DRIVE SHAFTS", Currently US Patent Application Publication No. 2014/030987,
-US Patent Application No. 14 / 248,581, Title of Invention "SURGICAL INSTRUMENT COMPRISING A CLOSEING DRIVE AND A FIRING DRIVE OPERATED FROM THE SAME ROTATABLE OUTPUT", Currently US Patent Application No. 3059
-US Patent Application No. 14 / 248,595, title of invention "SURGICAL INSTRUMENT SHAFT INCLUDING SWITCHES FOR CONTROLLING THE OPERATION OF THE SURGICAL INSTRUMENT", now published in U.S. Patent No. 14 / 248,595
-US Patent Application No. 14 / 248,588, Invention Title "POWERED LINEAR SURGICAL STAPLER", Currently US Patent Application Publication No. 2014/0309666,
-US Patent Application No. 14 / 248,591, Invention Title "TRANSMISSION ARRANGEMENT FOR A SURGICAL INSTRUMENT", Currently US Patent Application Publication No. 2014/0305911,
-US Patent Application No. 14 / 248,584, Title of Invention "MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH ALIGNMENT FEATURES FOR ALIGNING ROTARY DRIVE SHAFTS WITH SURFTS WITH SURGAL
-US Patent Application No. 14 / 248,587, Invention Title "POWERED SURGICAL Stapler", Currently US Patent Application Publication No. 2014/0309665,
-US Patent Application No. 14 / 248,586, Invention Title "DRIVE SYSTEM DECOUPLING ARRANGEMENT FOR A SURGICAL INSTRUMENT", now US Patent Application Publication No. 2014/035990, and
-US Patent Application No. 14 / 248,607, title of invention "MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH STATUS INDICATION ARRANGEMENTS", now US Patent Application Publication No. 2014/0359992.
本願の出願人はまた、2013年4月16日に出願された以下の特許出願を所有しており、これらはそれぞれの全体内容が参照により本明細書に組み込まれる:
−米国仮特許出願第61/812,365号、発明の名称「SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR」、
−米国仮特許出願第61/812,376号、発明の名称「LINEAR CUTTER WITH POWER」、
−米国仮特許出願第61/812,382号、発明の名称「LINEAR CUTTER WITH MOTOR AND PISTOL GRIP」、
−米国仮特許出願第61/812,385号、発明の名称「SURGICAL INSTRUMENT HANDLE WITH MULTIPLE ACTUATION MOTORS AND MOTOR CONTROL」、及び、
−米国仮特許出願第61/812,372号、発明の名称「SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR」。
The applicant of the present application also owns the following patent applications filed on April 16, 2013, the entire contents of which are incorporated herein by reference:
-US Provisional Patent Application No. 61 / 812,365, Title of Invention "SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR",
-US Provisional Patent Application No. 61 / 812,376, Invention Name "LINEAR CUTTER WITH POWER",
-US Provisional Patent Application No. 61 / 812,382, Title of Invention "LINEAR CUTTER WITH MOTOR AND PISTOL GRIP",
-US Provisional Patent Application No. 61 / 812,385, the title of the invention "SURGICAL INSTRUMENT HANDLE WITH MULTIPLE ACTION MOTORS AND MOTO CONTOR", and
-US Provisional Patent Application No. 61 / 812,372, title of invention "SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR".
本明細書に記載され添付の図面に示される実施形態の全体的な構造、機能、製造、及び使用の完全な理解をもたらすように、多くの具体的詳細が示される。周知の動作、構成要素、及び要素は、本明細書に記載される実施形態を不明瞭にしないようにするため詳細に記載されていない。本明細書に記載され図示される実施形態は非限定例であることが読者には理解され、それ故、本明細書に開示される特定の構造的及び機能的詳細は、典型であり例示であり得ることが理解されるであろう。それらに対する変形及び変更が、特許請求の範囲から逸脱することなく行われ得る。 Many specific details are provided to provide a complete understanding of the overall structure, function, manufacture, and use of embodiments described herein and shown in the accompanying drawings. Well-known behaviors, components, and elements are not described in detail so as not to obscure the embodiments described herein. It is understood by the reader that the embodiments described and illustrated herein are non-limiting examples, and therefore the particular structural and functional details disclosed herein are exemplary and exemplary. It will be understood that it is possible. Modifications and changes to them can be made without departing from the claims.
用語「備える(comprise)」(「comprises」及び「comprising」など、compriseの任意の語形)、「有する(have)」(「has」及び「having」など、haveの任意の語形)、「含む(include)」(「includes」及び「including」など、includeの任意の語形)」、及び「含有する(contain)」(「contains」及び「containing」など、containの任意の語形)は、開放型の連結動詞である。結果として、1つ若しくは2つ以上の要素を「備える」か、「有する」か、「含む」か、若しくは「含有する」外科用システム、デバイス、又は装置は、それら1つ又は2つ以上の要素を有しているが、それら1つ又は2つ以上の要素のみを有することに限定されない。同様に、1つ若しくは2つ以上の特徴を「備える」か、「有する」か、「含む」か、若しくは「含有する」、システム、デバイス、又は装置の要素は、それら1つ又は2つ以上の特徴を有しているが、それら1つ又は2つ以上の特徴のみを有することに限定されない。 The terms "comprise" (any form of comprise, such as "comprises" and "comprising"), "have" (any form of have, such as "has" and "having"), "include ( "Include" (any word form of include, such as "includes" and "including"), and "contain" (any word form of content, such as "contains" and "containing") are open. It is a concatenated verb. As a result, a surgical system, device, or device that "includes", "has", "contains", or "contains" one or more elements is one or more of them. It has elements, but is not limited to having only one or more of them. Similarly, one or more of the elements of a system, device, or device that "equipped", "has", "contains", or "contains" one or more features. However, it is not limited to having only one or more of these characteristics.
「近位」及び「遠位」という用語は、本明細書では、外科用器具のハンドル部分を操作する臨床医を基準として使用される。「近位」という用語は、臨床医に最も近い部分を指し、「遠位」という用語は、臨床医から離れた位置にある部分を指す。便宜上及び明確性のために、「垂直」、「水平」、「上」、及び「下」などの空間的用語が、本明細書において図面に対して使用され得ることが更に理解されるであろう。しかしながら、外科用器具は多くの向き及び位置で使用されるものであり、これらの用語は限定的及び/又は絶対的であることを意図したものではない。 The terms "proximal" and "distal" are used herein with reference to the clinician operating the handle portion of the surgical instrument. The term "proximal" refers to the part closest to the clinician, and the term "distal" refers to the part located away from the clinician. For convenience and clarity, it will be further understood that spatial terms such as "vertical", "horizontal", "top", and "bottom" may be used for drawings herein. Let's go. However, surgical instruments are used in many orientations and positions, and these terms are not intended to be limited and / or absolute.
腹腔鏡下及び低侵襲性の外科的処置を行うための、様々な例示的なデバイス及び方法が提供される。しかしながら、本明細書で開示される様々な方法及びデバイスが、例えば開放型の外科的処置と関連するものを含む、多くの外科的処置及び用途で使用され得ることが、読者には容易に理解されるであろう。本明細書の「発明を実施するための形態」を読み進めることで、読者は、本明細書に開示される様々な器具が、例えば、天然の開口部を通じて、組織に形成された切開又は穿刺穴を通じてなど、任意の方法で体内に挿入され得ることを更に認識するであろう。これらの器具の作用部分すなわちエンドエフェクタ部分は、患者の体内に直接に挿入することもでき、又は、外科用器具のエンドエフェクタ及び細長シャフトを進めることが可能な作用通路を有するアクセス装置を通じて挿入することもできる。 Various exemplary devices and methods are provided for performing laparoscopic and minimally invasive surgical procedures. However, it is readily apparent to the reader that the various methods and devices disclosed herein can be used in many surgical procedures and applications, including those associated with, for example, open surgical procedures. Will be done. By reading "Forms for Carrying Out the Invention" herein, the reader can read that the various instruments disclosed herein are incised or punctured into tissue, eg, through a natural opening. You will further recognize that it can be inserted into the body in any way, such as through a hole. The working part or end effector part of these instruments can be inserted directly into the patient's body, or through an access device with a passage of action that allows the end effector and elongated shaft of the surgical instrument to be advanced. You can also do it.
外科用ステープル留めシステムは、シャフトと、シャフトから延在するエンドエフェクタとを備えることができる。エンドエフェクタは、第1顎部と第2顎部とを備える。第1の顎部は、ステープルカートリッジを備える。ステープルカートリッジは、第1の顎部に挿入可能であり、かつ第1の顎部から着脱可能であるが、ステープルカートリッジが第1の顎部から着脱可能でないか、又は少なくとも容易に交換可能でない、他の実施形態も想起される。第2の顎部は、ステープルカートリッジから排出されたステープルを変形させるように構成されたアンビルを備える。第2の顎部は、閉鎖軸を中心にして第1の顎部に対して枢動可能であるが、第1の顎部が第2の顎部に対して枢動可能である、他の実施形態も想起される。外科用ステープル留めシステムは、エンドエフェクタをシャフトに対して回転させる、即ち関節運動させることができるように構成された関節継手を更に備える。エンドエフェクタは、関節継手を通って延在する関節運動軸線を中心にして回転可能である。関節継手を含まない他の実施形態も想起される。 Surgical staple fastening systems can include a shaft and an end effector extending from the shaft. The end effector includes a first jaw portion and a second jaw portion. The first jaw comprises a staple cartridge. The staple cartridge is removable from the first jaw and is removable from the first jaw, but the staple cartridge is not removable from the first jaw, or at least not easily replaceable. Other embodiments are also recalled. The second jaw comprises an anvil configured to deform the staple ejected from the staple cartridge. The second jaw is pivotable with respect to the first jaw about the closure axis, but the first jaw is pivotable with respect to the second jaw. Embodiments are also recalled. The surgical staple fastening system further comprises a joint that is configured to allow the end effector to rotate, or jointly, move with respect to the shaft. The end effector is rotatable about a joint motion axis that extends through the joint. Other embodiments that do not include joints are also recalled.
ステープルカートリッジは、カートリッジ本体を備える。カートリッジ本体は、近位端部と、遠位端部と、近位端部と遠位端部との間に延在するデッキとを含む。使用の際、ステープルカートリッジは、ステープル留めされる組織の第1の側面に位置付けられ、アンビルは、組織の第2の側面に位置付けられる。アンビルは、ステープルカートリッジに向かって移動させられて、デッキに対して組織を圧縮及びクランプする。続いて、カートリッジ本体内に着脱可能に格納されたステープルを、組織内に配備することができる。カートリッジ本体は、その内部に画定されたステープルキャビティを含み、ステープルは、ステープルキャビティ内に着脱可能に格納される。ステープルキャビティは、6つの長手方向列に配置される。3つの列のステープルキャビティは、長手方向スロットの第1の側面に位置付けられ、3つの列のステープルキャビティは、長手方向スロットの第2の側面に位置付けられる。ステープルキャビティ及びステープルの他の配置も可能であり得る。 The staple cartridge includes a cartridge body. The cartridge body includes a proximal end, a distal end, and a deck extending between the proximal and distal ends. In use, the staple cartridge is located on the first side of the tissue to be stapled and the anvil is located on the second side of the tissue. The anvil is moved towards the staple cartridge to compress and clamp the tissue against the deck. Subsequently, staples detachably stored in the cartridge body can be deployed in the tissue. The cartridge body includes a staple cavity defined therein, and the staples are detachably stored in the staple cavity. The staple cavities are arranged in six longitudinal rows. The three rows of staple cavities are located on the first side of the longitudinal slot and the three rows of staple cavities are located on the second side of the longitudinal slot. Other arrangements of staple cavities and staples are also possible.
ステープルは、カートリッジ本体内のステープルドライバによって支持される。ドライバは、第1の、即ち未発射位置と、ステープルをステープルキャビティから排出する、第2の、即ち発射位置との間で移動可能である。ドライバは、カートリッジ本体の底部周辺に延在する保定具によってカートリッジ本体内に保持され、また、カートリッジ本体を把持し、保定具をカートリッジ本体に対して保持するように構成された、弾性部材を含む。ドライバは、スレッドによってその未発射位置とその発射位置との間で移動可能である。スレッドは、近位端部に隣接した近位位置と、遠位端部に隣接した遠位位置との間で移動可能である。スレッドは、ドライバの下をスライドし、ドライバを持ち上げるように構成された複数の傾斜面を備え、ステープルがその上に支持され、アンビルに向かう。 The staples are supported by a staple driver inside the cartridge body. The driver can move between the first, i.e., unlaunched position and the second, i.e., the launched position, which ejects the staples from the staple cavity. The driver includes an elastic member that is held within the cartridge body by a retainer that extends around the bottom of the cartridge body and is configured to grip the cartridge body and hold the retainer against the cartridge body. .. The driver can be moved between its unfired position and its fired position by a thread. The thread can move between the proximal position adjacent to the proximal end and the distal position adjacent to the distal end. The thread slides under the driver and has multiple ramps configured to lift the driver, with staples supported on it and towards the anvil.
上記に加えて、スレッドは発射部材によって遠位側に移動される。発射部材は、スレッドに接触し、スレッドを遠位端部に向かって押し出すように構成される。カートリッジ本体内に画定された長手方向スロットは、発射部材を受け入れるように構成される。アンビルも、発射部材を受け入れるように構成されたスロットを含む。発射部材は、第1の顎部を係合する第1のカムと、第2の顎部を係合する第2のカムとを更に備える。発射部材を遠位側に前進させる際、第1のカム及び第2のカムは、ステープルカートリッジのデッキとアンビルとの間の距離、即ち組織隙間を制御することができる。発射部材はまた、ステープルカートリッジとアンビルとの中間に捕捉された組織を切開するように構成されたナイフも備える。ステープルがナイフよりも前方に排出されるように、ナイフが傾斜面に対して少なくとも部分的に近位側に位置付けられることが望ましい。 In addition to the above, the thread is moved distally by the launching member. The launching member is configured to contact the thread and push the thread towards the distal end. Longitudinal slots defined within the cartridge body are configured to receive launching members. The anvil also includes a slot configured to accept the launching member. The launching member further comprises a first cam that engages the first jaw and a second cam that engages the second jaw. When advancing the launching member distally, the first cam and the second cam can control the distance between the deck of the staple cartridge and the anvil, i.e. the tissue gap. The launching member also comprises a knife configured to incise the captured tissue between the staple cartridge and the anvil. It is desirable that the knife be positioned at least partially proximal to the slope so that the staples are ejected forward of the knife.
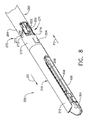
図1〜4は、再使用されてもされなくてもよいモータ駆動式外科用切断及び締結器具10を示している。図示される実施形態では、器具10は、臨床医が把持し、操作し、作動させるように構成されたハンドル14を備えるハウジング12を含む。ハウジング12は、1つ又は2つ以上の外科的タスク又は処置を実施するように構成された外科用エンドエフェクタ300が動作可能に結合されている、細長シャフトアセンブリ200に動作可能に取り付けられるように構成されている。細長シャフトアセンブリ200は、例えば、参照によってその開示内容全体が本明細書に組み込まれる、米国特許出願第14/226,075号、発明の名称「MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFT ASSEMBLIES」において開示されている様々な方式で他のシャフトアセンブリと交換可能となり得る。他の実施形態では、細長シャフトアセンブリは、他のシャフトアセンブリと交換可能でなくてもよく、基本的に、器具の専用の非着脱可能部分を備え得る。
FIGS. 1 to 4 show a motor driven surgical cutting and
本発明を実施するための形態を読み進めるに従って、本明細書で開示する様々な形態の交換式シャフトアセンブリはまた、ロボット制御式の外科用システムと関連させて効果的に用いられ得ることが理解されよう。したがって、「ハウジング」という用語はまた、本明細書で開示する細長シャフトアセンブリ及びそれらそれぞれの等価物を作動させるのに使用することができる、少なくとも1つの制御モーションを生成し適用するように構成された、少なくとも1つの駆動システムを収容するか又は別の方法で動作可能に支持する、ロボットシステムのハウジング又は類似の部分を包含してもよい。「フレーム」という用語は、手持式外科用器具の一部分を指してもよい。「フレーム」という用語はまた、ロボット制御式の外科用器具の一部分、及び/又は外科用器具を動作可能に制御するのに使用されてもよいロボットシステムの一部分を表してもよい。例えば、本明細書で開示するシャフトアセンブリは、参照によって全体内容が本明細書に組み込まれる、米国特許出願第13/118241号、発明の名称「SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS」、現在の米国特許出願公開第2012/0298719号で開示されている様々なロボットシステム、器具、構成要素、及び方法と共に用いられ得る。 As you read through the embodiments for practicing the present invention, it is understood that the various forms of interchangeable shaft assemblies disclosed herein can also be effectively used in connection with robotic surgical systems. Will be done. Therefore, the term "housing" is also configured to generate and apply at least one control motion that can be used to actuate the elongated shaft assemblies and their respective equivalents disclosed herein. It may also include a housing or similar portion of the robot system that accommodates at least one drive system or otherwise operably supports it. The term "frame" may refer to a portion of a handheld surgical instrument. The term "frame" may also refer to a portion of a robot-controlled surgical instrument and / or a portion of a robotic system that may be used to operably control the surgical instrument. For example, the shaft assemblies disclosed herein are incorporated herein by reference in their entirety, U.S. Patent Application No. 13/118241, the title of the invention "SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS", present in the United States. It can be used with various robot systems, instruments, components, and methods disclosed in Patent Application Publication No. 2012/02987719.
図1に示されるハウジング12は、外科用ステープルカートリッジ304を中に動作可能に支持するように構成された、外科用切断及び締結デバイスを備えるエンドエフェクタ300を含む、細長シャフトアセンブリ200と共に示されている。ハウジング12は、種々のサイズ及びタイプのステープルカートリッジを支持するように適合されたエンドエフェクタを含み、種々のシャフトの長さ、サイズ、及びタイプなどを有するシャフトアセンブリと関連させて使用するように構成されてもよい。加えて、ハウジング12はまた、例えば、高周波(RF)エネルギー、超音波エネルギー及び/又はモーションなどの他のモーション及び形態のエネルギーを、様々な外科用途及び処置と関連させて用いられるように適合されたエンドエフェクタ構成に印加するように構成されたアセンブリを含んだ様々な他のシャフトアセンブリと共に効果的に用いられてもよい。更に、エンドエフェクタ、シャフトアセンブリ、ハンドル、外科用器具、及び/又は外科用器具システムは、任意の好適な締結具を利用して組織を締結することができる。例えば、中に着脱可能に格納された複数の締結具を備える締結具カートリッジが、シャフトアセンブリのエンドエフェクタに着脱可能に挿入及び/又は装着され得る。
The housing 12 shown in FIG. 1 is shown with an
図1は、交換式細長シャフトアセンブリ200が動作可能に結合された外科用器具10のハウジング12又はハンドル14を示している。図1で分かるように、ハンドル14は、ねじ、スナップ機構、接着剤などで相互連結され得る一対の相互連結可能なハンドルハウジングセグメント16及び18を備え得る。図示の構成において、ハンドルハウジングセグメント16、18は、臨床医に握持及び操作され得るピストルグリップ部分19を形成するように協働する。以下で更に詳しく記載されるように、ハンドル14は、内部に複数の駆動システムを動作可能に支持しており、これらの駆動システムは、動作可能に取り付けられた交換式シャフトアセンブリの対応する部分に対して、様々な制御モーションを生成して加えるように構成されている。
FIG. 1 shows a housing 12 or handle 14 of a
ここで図2を参照すると、ハンドル14は、複数の駆動システムを動作可能に支持するフレーム20を更に含んでもよい。例えば、フレーム20は、全体として30で示される、「第1」の、つまり閉鎖駆動システムを動作可能に支持することができ、この閉鎖駆動システムは、そこに動作可能に装着又は連結される細長シャフトアセンブリ200に閉鎖及び開放モーションを加えるために用いられ得る。少なくとも1つの形態では、閉鎖駆動システム30は、フレーム20によって枢動可能に支持される閉鎖トリガ32の形態のアクチュエータを含んでもよい。より具体的には、図2に示されるように、閉鎖トリガ32は、ピン33によってハウジング14に枢動可能に結合されている。かかる配置によって、閉鎖トリガ32を臨床医が操作することが可能になり、それによって、臨床医がハンドル14のピストルグリップ部分19を把持すると、閉鎖トリガ32が、開始位置又は「非作動」位置から「作動」位置へと、より具体的には完全圧縮位置又は完全作動位置へと容易に枢動することができる。閉鎖トリガ32は、ばね又は他の付勢装置(図示せず)によって、非作動位置へと付勢されてもよい。様々な形態では、閉鎖駆動システム30は、閉鎖トリガ32に枢動可能に連結された閉鎖リンク機構組立体34を更に含む。図2で分かるように、閉鎖リンク機構アセンブリ34は、ピン35によって閉鎖トリガ32に枢動可能に結合された第1の閉鎖リンク36及び第2の閉鎖リンク38を含んでもよい。第2の閉鎖リンク38は、本明細書では「取付け部材」と呼ばれることもあり、横断取付けピン37を含む。
With reference to FIG. 2, the
図2を引き続き参照すると、第1の閉鎖リンク36はその上に、フレーム20に枢動可能に結合された閉鎖解除アセンブリ60と協働するように構成された、ロック壁又は端部39を有してもよいことを観察することができる。少なくとも1つの形態では、閉鎖解除組立体60は、遠位側に突出するロック爪64がその上に形成された解除ボタン組立体62を備えてもよい。解除ボタン組立体62は、解除ばね(図示せず)によって反時計方向に枢動させられてもよい。臨床医が閉鎖トリガ32をその非作動位置からハンドル14のピストルグリップ部分19に向かって押下すると、ロック爪64が第1の閉鎖リンク36上のロック壁39との保持係合に至る地点に向かって第1の閉鎖リンク36が上向きに枢動し、それによって閉鎖トリガ32が非作動位置に復帰することが防止される。したがって、閉鎖解除組立体60は、閉鎖トリガ32を完全作動位置でロックするように働く。臨床医が、閉鎖トリガ32をロック解除して、それを非作動位置へ付勢することができるようにしたい場合、臨床医は単純に、閉鎖解除ボタン組立体62を枢動し、それによってロック爪64を移動させて、第1の閉鎖リンク36上のロック壁39との係合から外す。ロック爪64が移動させられて第1の閉鎖リンク36との係合から外れると、閉鎖トリガ32は枢動して非作動位置に戻ってもよい。他の閉鎖トリガロック及び解放構成が用いられてもよい。
Continuing with reference to FIG. 2, the first closure link 36 has a locking wall or end 39 on it configured to cooperate with an unlocking
閉鎖トリガ32が非作動位置から作動位置へ移動されると、閉鎖解除ボタン62は、第1の位置と第2の位置との間で枢動される。閉鎖解除ボタン62の回転は、上向きの回転であるとして言及され得るが、閉鎖解除ボタン62の少なくとも一部分は、回路基板100に向かって回転させられている。依然として図2を参照すると、閉鎖解除ボタン62は、そこから延在するアーム61と、アーム61に装着される、例えば永久磁石などの磁気素子63とを含むことができる。閉鎖解除ボタン62をその第1の位置から第2の位置へと回転させると、磁気素子63は、回路基板100に向かって移動することができる。回路基板100は、磁気素子63の移動を検出するように構成された、少なくとも1つのセンサを含み得る。少なくとも1つの実施形態では、「ホール効果」センサが回路基板100の底面に装着され得る。ホール効果センサは、磁気素子63の移動によって生じる、ホール効果センサを取り巻く磁場の変化を検出するように構成され得る。ホール効果センサは、例えば、マイクロコントローラとの信号通信が可能であり、それによって閉鎖解除ボタン62が、閉鎖トリガ32の非作動位置とエンドエフェクタの開放構成とに関連付けられた第1の位置にあるか、閉鎖トリガ32の作動位置とエンドエフェクタの閉鎖構成とに関連付けられた第2の位置にあるか、かつ/又は第1の位置と第2の位置との間の任意の位置にあるかどうかを判断し得る。
When the
また図示の構成では、ハンドル14及びフレーム20は、取り付けられた交換式シャフトアセンブリの対応部分に対して発射モーションを加えるように構成された、本明細書では発射駆動システム80と呼ばれる別の駆動システムを動作可能に支持する。発射駆動システム80はまた、本明細書では「第2の駆動システム」と呼ばれることもある。発射駆動システム80は、ハンドル14のピストルグリップ部分19内に位置する電気モータ82を用いてもよい。様々な形態では、モータ82は、例えば、約25,000RPMの最大回転数を有するブラシ付きDC駆動モータであってもよい。他の構成において、モータとしては、ブラシレスモータ、コードレスモータ、同期モータ、ステッパモータ、又は任意の他の好適な電気モータを挙げることができる。モータ82は、1つの形態では着脱可能なパワーパック92を備えてもよい、電源90によって給電されてもよい。例えば、図2で分かるように、パワーパック92は、遠位側ハウジング部分96に取り付けるために構成された、近位側ハウジング部分94を備えてもよい。近位側ハウジング部分94及び遠位側ハウジング部分96は、複数の電池98を中に動作可能に支持するように構成されている。電池98はそれぞれ、例えば、リチウムイオン(「LI」)又は他の好適な電池を含んでもよい。遠位側ハウジング部分96は、モータ82にやはり動作可能に結合されている、制御回路基板組立体100に着脱可能かつ動作可能に取り付けられるために構成されている。直列に接続されてもよい多数の電池98が、外科用器具10の電源として使用されてもよい。それに加えて、電源90は、交換可能及び/又は再充電可能であってもよい。
Also in the illustrated configuration, the
他の様々な形態に関連して上に概説したように、電気モータ82は、長手方向可動駆動部材120上にある駆動歯122の組又はラックと噛合係合して装着される歯車減速機アセンブリ84と動作可能にインターフェースする、回転式シャフト(図示せず)を含む。使用の際、電源90によって提供される電圧極性によって電気モータ82を時計方向に動作させることができるが、電池によって電気モータに印加される電圧極性は、電気モータ82を反時計方向に動作させるために反転させることができる。電気モータ82がある方向に回転されると、駆動部材120は、遠位方向「DD」に軸方向駆動されることになる。モータ82が反対の回転方向に駆動されると、駆動部材120は、近位方向「PD」に軸方向駆動されることになる。ハンドル14は、電源90によって電気モータ82に印加される極性を反転させるように構成することができるスイッチを含むことができる。本明細書に記載される他の形態と同様に、ハンドル14はまた、駆動部材120の位置、及び/又は駆動部材120が移動させられている方向を検出するように構成されたセンサを含むことができる。
As outlined above in relation to various other forms, the
モータ82の作動は、ハンドル14上で枢動可能に支持される発射トリガ130によって制御される。発射トリガ130は、非作動位置と作動位置との間で枢動させられてもよい。発射トリガ130は、ばね132若しくは他の付勢装置によって非作動位置へと付勢させられてもよく、それにより、臨床医が発射トリガ130を解放すると、それがばね132若しくは付勢装置によって非作動位置へと枢動されるか又は別の方法で復帰させられてもよい。少なくとも1つの形態では、発射トリガ130は、上述したように、閉鎖トリガ32の「外側」に位置付けることができる。少なくとも1つの形態では、発射トリガ安全ボタン134が、ピン35によって閉鎖トリガ32に枢動可能に装着されてもよい。安全ボタン134は、発射トリガ130と閉鎖トリガ32との間に位置付けられ、そこから突出する枢動アーム136を有してもよい。図2を参照されたい。閉鎖トリガ32が非作動位置にあるとき、安全ボタン134は、ハンドル14に収容され、臨床医が容易にアクセスすることができず、発射トリガ130の作動を防止する安全位置と、発射トリガ130が発射されてもよい発射位置との間で移動させることもできない。臨床医が閉鎖トリガ32を押下すると、安全ボタン134及び発射トリガ130が下に枢動して、次いで、臨床医がそれらを操作することが可能になる。
The operation of the
上述したように、ハンドル14は、閉鎖トリガ32及び発射トリガ130を含む。発射トリガ130は、閉鎖トリガ32に枢動可能に装着され得る。閉鎖トリガ32がその非作動位置から作動位置へ移動されると、発射トリガ130は、上述のように下向きに下降し得る。安全ボタン134がその発射位置へと移動された後、発射トリガ130が押下されて、外科用器具発射システムのモータを動作させ得る。様々な例では、ハンドル14は、閉鎖トリガ32の位置及び/又は発射トリガ130の位置を判断するように構成された追跡システムを含み得る。
As mentioned above, the
上に示されるように、少なくとも一形態において、長手方向可動駆動部材120は、ギヤ減速機アセンブリ84の対応する駆動ギヤ86と噛合係合するために、その上に形成された駆動歯122のラックを有する。少なくとも1つの形態はまた、モータ82が使用不能になった場合に、臨床医が長手方向に移動可能な駆動部材120を手動で後退させることができるように構成された、手動作動式の「緊急離脱」組立体140を含む。緊急離脱組立体140は、手動で枢動させて、駆動部材120にやはり設けられた歯124とラチェット係合するように構成された、レバー又は緊急離脱ハンドル組立体142を含んでもよい。したがって、臨床医は、緊急離脱ハンドルアセンブリ142を使用して駆動部材120を近位方向「PD」にラチェットで駆動させることによって、駆動部材120を手動により駆動させることができる。米国特許出願公開第2010/0089970号は、本明細書に開示する様々な器具と共に用いることもできる、緊急離脱装置、並びに他の構成要素、構成、及びシステムを開示している。米国特許出願第12/249,117号、発明の名称「POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLY RETRACTABLE FIRING SYSTEM」、現在の米国特許第8,608,045号が、その全体が参照によって本明細書に組み込まれる。
As shown above, in at least one embodiment, the longitudinal movable drive member 120 is a rack of
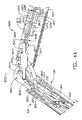
次に図1及び3を参照すると、細長シャフトアセンブリ200は、ステープルカートリッジ304を中に動作可能に支持するように構成された細長チャネル302を備える外科用エンドエフェクタ300を含んでいる。エンドエフェクタ300は、細長チャネル302に対して枢動可能に支持されるアンビル310を更に含んでもよい。以下で更に詳細に論じるように、外科用エンドエフェクタ300は、関節継手270の周りで細長シャフトアセンブリに対して関節運動され得る。図3及び4で分かるように、シャフトアセンブリ200は、ノズル部分202及び203からなる近位ハウジング又はノズル201を更に含み得る。シャフトアセンブリ200は、エンドエフェクタ300のアンビル310を閉鎖及び/又は開放するために利用され得る閉鎖管260を更に含む。図4で分かるように、シャフトアセンブリ200は、関節ロック350のシャフトフレーム部分212を固定可能に支持するように構成され得るスパイン210を含む。関節ロック350の構成及び動作に関する詳細は、その開示内容の全体が参照によって本明細書に組み込まれる、米国特許出願第13/803,086号、発明の名称「ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK」、現在の米国特許出願公開第2014/0263541号に記載されている。スパイン210は、1つめには、その中に発射部材220を摺動可能に支持し、2つめには、スパイン210の周りに延びる閉鎖管260を摺動可能に支持するように構成される。スパイン210はまた、近位関節ドライバ230を摺動可能に支持する。近位関節ドライバ230は、関節ロック350に動作可能に係合するように構成された遠位端部231を有する。一構成では、関節ロック350は、エンドエフェクタフレーム(図示せず)上の駆動ピン(図示せず)に動作可能に係合するように適合された関節フレーム352とインターフェースする。
Next, referring to FIGS. 1 and 3, the
図示の構成では、スパイン210は、シャーシ240内に回転可能に支持される近位端部211を備えている。1つの構成では、例えば、スパイン210の近位端部211には、シャーシ240内で支持されるように構成されたスパイン軸受216にねじ込みによって取り付けられるように、ねじ山214が形成される。図3を参照されたい。かかる構成により、シャーシ240へのスパイン210の回転可能な取付けが容易となり、そのため、スパイン210は、シャーシ240に対してシャフト軸線SA−SAを中心にして選択可能に回転され得る。シャフトアセンブリ200はまた、シャーシ240に対して軸方向に移動され得るようにその中に摺動可能に支持される閉鎖シャトル250を含む。図3で分かるように、閉鎖シャトル250は、一対の近位突出フック252を含み、近位突出フック252は、以下で更に詳細に論じるように、第2の閉鎖リンク38に装着された装着ピン37に装着するように構成されている。図2を参照されたい。閉鎖チューブ260の近位端部261は、相対回転するように閉鎖シャトル250に結合されている。例えば、U字コネクタ263は、閉鎖管260の近位端部261にある環状スロット262に挿入され、閉鎖シャトル250の垂直スロット253内で保定される。図3を参照されたい。かかる構成は、閉鎖管260を閉鎖シャトル250と共に軸方向移動するようにそれに取り付ける役割を果たし、一方で閉鎖管260がシャフト軸線SA−SAを中心にして閉鎖シャトル250に対して回転することを可能にする。閉鎖ばね268は、閉鎖管260上で軸支され、閉鎖管260を近位方向「PD」に付勢する役割を果たし、それによって、シャフトアセンブリ200がハンドル14に動作可能に結合されると、閉鎖トリガを非作動位置へと枢動する役割を果たすことができる。
In the illustrated configuration, the
やはり上述したように、細長シャフトアセンブリ200は、シャフトスパイン210内で軸方向移動するように支持される発射部材220を更に含む。発射部材220は、遠位切断部分又は発射ビーム280に装着されるように構成された中間発射シャフト部分222を含む。発射部材220はまた、本明細書において「第2のシャフト」及び/又は「第2のシャフトアセンブリ」と呼ばれることもある。図4で分かるように、中間発射シャフト部分222は、その遠位端部に長手方向スロット223を含んでもよく、長手方向スロット223は、遠位発射ビーム280の近位端部282上のタブ284を受容するように構成され得る。長手方向スロット223及び近位端部282は、それらの間の相対運動を可能にするようにサイズ決めし、構成することができ、スリップ継手286を備えることができる。スリップ継手286は、発射ビーム280を移動させずに、又は少なくとも実質的に移動させずに、発射駆動部220の中間発射シャフト部分222を移動させて、外科用エンドエフェクタ300を関節運動させることを可能にし得る。外科用エンドエフェクタ300が好適に方向付けられると、発射ビーム280を前進させ、エンドエフェクタ300内に支持され得るステープルカートリッジを発射するために、長手方向スロット223の近位側壁がタブ284と接触するまで、中間発射シャフト部分222は遠位側に前進され得る。更に図4から分かるように、シャフトスパイン210は細長開口部又は窓213を有して、シャフトフレーム210への中間発射シャフト部分222の組付け及び挿入を容易にしている。中間発射シャフト部分222がシャフトフレーム210に挿入されると、頂部フレーム分割部215がシャフトフレーム212と係合されて、それらの中に中間発射シャフト部分222及び発射ビーム280を封入し得る。発射部材220の動作に関する更なる記載は、米国特許出願第13/803,086号、現在の米国特許出願公開第2014/0263541号に見出すことができる。
As also mentioned above, the
上記に加えて更に、図示のシャフトアセンブリ200は、関節ドライバ230を発射部材220に選択的にかつ解放可能に結合するように構成され得るクラッチアセンブリ400を含む。1つの形態では、クラッチ組立体400は、発射部材220の周りに位置付けられるロックカラー、即ちスリーブ402を含み、ロックスリーブ402は、ロックスリーブ402が関節ドライバ360を発射部材220に結合する係合位置と、関節ドライバ360が発射部材200に動作可能に結合されない係合解除位置との間で回転させることができる。ロックスリーブ402がその係合位置にあるとき、発射部材220が遠位側に移動することによって、関節ドライバ360を遠位側に移動させることができ、それに対応して、発射部材220の近位方向移動によって、近位関節ドライバ230を近位側に移動させることができる。ロックスリーブ402がその係合解除位置にあるとき、発射部材220の移動は、近位関節ドライバ230に伝達されず、その結果、発射部材220は、近位関節ドライバ230とは独立して移動することができる。様々な状況下では、近位関節ドライバ230が発射部材220によって近位又は遠位方向に移動されていないとき、近位関節ドライバ230は関節ロック350によって所定位置に保持され得る。
In addition to the above, the illustrated
更に図4から分かるように、ロックスリーブ402は、発射部材220を受容するように構成された長手方向アパーチャ403が中に画定された、円筒状の又は少なくとも実質的に円筒状の本体を備え得る。ロックスリーブ402は、直径方向に対向する、内側に面するロック突起404及び外側に面するロック部材406を備えることができる。ロック突起404は、発射部材220と選択的に係合されるように構成することができる。より具体的には、ロックスリーブ402がその係合位置にあるとき、ロック突起404は、発射部材220に画定された駆動ノッチ224内に位置付けられ、それによって、遠位押力及び/又は近位引張力を発射部材220からロックスリーブ402に伝達することができる。ロックスリーブ402がその係合位置にあるとき、第2のロック部材406は、近位関節ドライバ232に画定された駆動ノッチ230内に受容され、それによって、ロックスリーブ402に加えられる遠位押力及び/又は近位引張力が近位関節ドライバ230に伝達され得る。実質的に、発射部材220、ロックスリーブ402、及び近位関節ドライバ230は、ロックスリーブ402がその係合位置にあるとき、互いに移動することになる。他方で、ロックスリーブ402がその係合解除位置にあるとき、ロック突起404は発射部材220の駆動ノッチ224内に位置付けられないことがあり、その結果、遠位押力及び/又は近位引張力が発射部材220からロックスリーブ402に伝達されないことがある。それに応じて、遠位押力及び/又は近位引張力は近位関節ドライバ230に伝達されなくてもよい。かかる状況では、発射部材220を、ロックスリーブ402及び近位側関節ドライバ230に対して近位側及び/又は遠位側に摺動させることができる。
Further, as can be seen from FIG. 4, the lock sleeve 402 may comprise a cylindrical or at least substantially cylindrical body in which a longitudinal aperture 403 configured to receive the launching
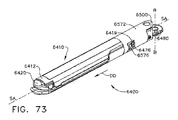
図4から分かるように、細長シャフトアセンブリ200は、閉鎖管260上に回転可能に受容されるスイッチドラム500を更に含む。スイッチドラム500は、外向きに突出する作動ピン410を中に受け入れるシャフトボス504が形成された、中空シャフトセグメント502を備える。様々な状況において、作動ピン410は、スロット267を通って、ロックスリーブ402に設けられた長手方向スロット408内へと延在して、ロックスリーブ402が近位関節ドライバ230と係合されたときにその軸方向運動を容易にする。回転ねじりばね420は、スイッチドラム500上のシャフトボス504及びノズルハウジング203の一部分に係合して、付勢力をスイッチドラム500に加えるように構成されている。スイッチドラム500は、その中に画定された少なくとも部分的に円周方向の開口部506を更に備えることができ、その開口部は、図5及び6を参照すると、ノズル部分202、203から延在する円周方向マウント204、205を受容し、スイッチドラム500と近位ノズル201との間の相対回転は許容するが並進は許容しないように構成され得る。マウントはまた、閉鎖管260の開口部266を通って延在して、シャフトスパイン210の陥凹部nに着座される。しかしながら、マウントがスイッチドラム500内の対応のスロット506の端部に到達する点までノズル201を回転させると、スイッチドラム500がシャフト軸線SA−SAを中心に回転することになる。スイッチドラム500が回転すると、最終的に作動ピン410及びロックスリーブ402が、その係合位置と係合解除位置との間で回転することになる。したがって、本質的に、ノズル201は、米国特許出願第13/803,086号、現在の米国特許出願公開第2014/0263541号に更に詳細に記載されている様々な方式で、関節駆動システムと発射駆動システムとを動作可能に係合及び係合解除するために用いられてもよい。
As can be seen from FIG. 4, the
やはり図3及び4に示すように、細長シャフトアセンブリ200は、例えば、エンドエフェクタ300にかつ/若しくはエンドエフェクタ300から電力を伝導し、かつ/又はエンドエフェクタ300にかつ/若しくはエンドエフェクタ300から信号を通信するように構成され得るスリップリングアセンブリ600を備え得る。スリップリング組立体600は、シャーシ240から延在するシャーシフランジ242に装着される近位コネクタフランジ604と、シャフトハウジング202、203に画定されたスロット内に位置付けられる遠位コネクタフランジ601とを備えることができる。近位コネクタフランジ604は第1の面を備えることができ、遠位コネクタフランジ601は、第1の面に隣接して位置付けられ、かつそれに対して移動可能である第2の面を備えることができる。遠位コネクタフランジ601は、シャフト軸線SA−SAを中心にして、近位コネクタフランジ604に対して回転することができる。近位コネクタフランジ604は、その第1の面に画定される、複数の同心の、又は少なくとも実質的に同心の導体602を備えることができる。コネクタ607は、遠位コネクタフランジ601の近位面に装着することができ、複数の接点(図示せず)を有してもよく、各接点は、導体602の1つに対応し、かつそれと電気的に接触する。かかる構成により、近位コネクタフランジ604と遠位コネクタフランジ601とが、それらの間の電気的接触を維持したまま相対回転することが可能になる。近位コネクタフランジ604は、例えば、シャフトシャーシ240に装着されたシャフト回路基板610と信号連通して導体602を配置することができる、電気コネクタ606を含むことができる。少なくとも1つの例では、複数の導体を備える配線ハーネスが、電気コネクタ606とシャフト回路基板610との間に延在することができる。電気コネクタ606は、シャーシ装着フランジ242に画定されたコネクタ開口部243を通って近位側に延在してもよい。図7を参照されたい。2013年3月13日に出願された米国特許出願第13/800,067号、発明の名称「STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM」、現在の米国特許出願公開第2014/0263552号は、その全体内容が参照により本明細書に組み込まれる。2013年3月13日に出願された米国特許出願第13/800,025号、発明の名称「STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM」、現在の米国特許出願公開第2014/0263551号は、その全体内容が参照により本明細書に組み込まれる。スリップリング組立体600に関する更なる詳細は、米国特許出願第13/803,086号、現在の米国特許出願公開第2014/0263541号に見出すことができる。
As also shown in FIGS. 3 and 4, the
上述したように、細長シャフトアセンブリ200は、ハンドル14に固定可能に装着される近位部分と、長手方向シャフト軸SA−SAを中心にして回転可能な遠位部分とを含むことができる。回転可能な遠位シャフト部分は、上述したように、スリップリング組立体600を中心にして近位部分に対して回転させることができる。スリップリング組立体600の遠位コネクタフランジ601は、回転可能な遠位シャフト部分内に位置付けることができる。また、上記に加えて更に、スイッチドラム500も、回転可能な遠位シャフト部分内に位置付けることができる。回転可能な遠位シャフト部分を回転させると、遠位コネクタフランジ601及びスイッチドラム500を互いに同期して回転させることができる。それに加えて、スイッチドラム500を、遠位コネクタフランジ601に対して第1の位置と第2の位置との間で回転させることができる。スイッチドラム500がその第1の位置にあるとき、関節駆動システム(すなわち、近位関節ドライバ230)は、発射駆動システムから動作可能に係合解除され得、したがって、発射駆動システムの動作は、シャフトアセンブリ200のエンドエフェクタ300を関節運動させ得ない。スイッチドラム500がその第2の位置にあるとき、関節駆動システム(すなわち、近位関節ドライバ230)は、発射駆動システムと動作可能に係合され得、したがって、発射駆動システムの動作は、シャフトアセンブリ200のエンドエフェクタ300を関節運動させ得る。スイッチドラム500をその第1の位置と第2の位置との間で移動させると、スイッチドラム500は、遠位コネクタフランジ601に対して移動させられる。様々な例において、シャフトアセンブリ200は、スイッチドラム500の位置を検出するように構成された少なくとも1つのセンサを備え得る。
As described above, the
再び図4を参照すると、閉鎖管アセンブリ260は、二重枢動閉鎖スリーブアセンブリ271を含んでいる。様々な形態によれば、二重枢動閉鎖スリーブ組立体271は、上部及び下部遠位突出タング273、274を含むエンドエフェクタ閉鎖スリーブ272を含む。上側二重枢動リンク277は、閉鎖チューブ260上にある上部近位突出タング273の上部遠位ピンホール、及び上部遠位突出タング264の上部近位ピンホールにそれぞれ係合する、上向きに突出する遠位及び近位枢動ピンを含む。下側二重枢動リンク278は、下部の近位突出タング274の下部遠位ピンホール、及び下部の遠位突出タング265の下部近位ピンホールにそれぞれ係合する、上向きに突出する遠位及び近位枢動ピンを含む。図6を参照されたい。
With reference to FIG. 4 again, the
図5〜8は、上記で説明したタイプの外科用器具、又は外科用エンドエフェクタの一部分に閉鎖及び開放モーションを加えるように構成された閉鎖部材を軸方向に移動させるための制御モーションを生成するように構成された閉鎖システムを含む他の外科用器具構成の細長シャフトアセンブリに動作可能に取り付けられるように構成された、外科用エンドエフェクタ300の一形態を示している。図示の例では、以下で更に詳細に論じるように、外科用エンドエフェクタは、全体として339で示す関節継手339の周りで細長シャフトアセンブリの近位部分に対して関節運動されるように構成されている。他の構成はしかしながら、関節運動が可能でないこともある。図6で分かるように、関節継手339は、外科用エンドエフェクタ300がそれを中心として選択的に関節運動され得る関節運動軸線B−Bを画定している。図示の例では、関節運動軸線B−Bは、細長シャフトアセンブリのシャフト軸線SA−SAを実質的に横切っている。
FIGS. 5-8 generate a control motion for axially moving a closing member configured to add closing and opening motion to a portion of a surgical instrument of the type described above, or a surgical end effector. It shows an embodiment of a
図示の外科用エンドエフェクタ300は、第1の顎部308と第の2顎部309とを備え、第の2顎部309は、第1の顎部308に対して開放位置(図7)と様々な閉鎖位置(図8)との間で選択的に移動可能である。図示の実施形態では、第1の顎部308は、外科用ステープルカートリッジ304を中に動作可能に支持するように構成された細長チャネル302を備え、第2の顎部309はアンビル310を備えている。しかしながら、他の外科用顎部の構成も、本発明の趣旨及び範囲から逸脱することなく用いられ得る。図5で分かるように、付加的な支持を外科用ステープルカートリッジ304に与えるため、並びに、外科用ステープルカートリッジ304に形成されたステープルポケット306内に支持されているステープルドライバ(図示せず)が使用前に外科用ステープルカートリッジから外れるのを防止するために、支持パン305が外科用ステープルカートリッジ304に取り付けられ得る。図5で分かるように、細長チャネル302は、2つの直立外側壁322を含んだ近位端部分320を有している。アンビル310は、ステープル成形下面313をその上に形成されたアンビル本体312を含む。アンビル本体の近位端部314は、一対のアンビル取付けアーム316を画定する発射部材スロット315によって分岐されている。各アンビル取付けアーム316は、傾斜上面321を含んでおり、また、側方突出アンビルトラニオン317と、カム表面又は「スロット付きカム表面」319を画定するカムスロット318とを含んでいる。図5を参照されたい。カムスロット318のうちの1つは本明細書において「第1のカムスロット」と呼ばれ得るものであり、そのカム表面は「第1のカム表面」と呼ばれる。同様に、他のカムスロット318は「第2のカムスロット」と呼ばれ得るものであり、そのカム表面は本明細書において「第2のカム表面」と呼ばれる。アンビルトラニオン317のうちの対応する1つを中に受容するためのトラニオンホール324が、細長チャネル302の各外側壁322に設けられている。そのような構成は、トラニオンホール324によって規定されかつシャフト軸線SA−SAを横切るアンビル軸線A−Aを中心とした選択的な枢動可能な移動のために、細長チャネル302にアンビル310を移動可能に装着するのに役立つ。図6を参照されたい。
The illustrated
図示の構成では、アンビル310は、細長チャネル302及び中に支持された外科用ステープルカートリッジ304に対して、一対の開放カム354によって枢動的に開放位置へと移動され、開放カム354は、アンビルアクチュエータ部材内で着脱可能に支持されても、アンビルアクチュエータ部材に着脱可能に取り付けられても、アンビルアクチュエータ部材に永久的に取り付けられても、アンビルアクチュエータ部材内に一体的に形成されてもよい。図示の実施形態では、アンビルアクチュエータ部材はエンドエフェクタ閉鎖スリーブ272を備えている。図5を参照されたい。各開放カム354は外側本体部分356を含んでおり、その外側本体部分356は、それから内向きに突出するカムタブ358を有している。外側本体部分356は、少なくとも1つの構成では、エンドエフェクタ閉鎖スリーブ272内に形成された対応するカムホール355内にスナップ嵌めされて着脱式で係合されるように構成されている。例えば、外側本体部分356は、エンドエフェクタ閉鎖スリーブ壁のうちのカムホール355を画定する対応する部分にスナップ式で係合するように構成された面取り停止部分357を含み得る。外側本体部分356の別の部分は、エンドエフェクタ閉鎖スリーブ272のうちのカムホール355に隣接する部分の内側で受容されるように構成されたドッグレッグ形体359を形成され得る。エンドエフェクタ閉鎖スリーブ272に外側本体部分356を着脱可能に装着するために、他のスナップタブ構成もまた用いられ得る。他の構成において、例えば、外側本体部分は、エンドエフェクタ閉鎖スリーブ272とスナップ係合するように構成されなくてもよい。そのような構成では、外側本体部分は、開放カムの外側本体部分に被さってエンドエフェクタ閉鎖スリーブの外周の周りに延びる環状クリンプリングによって定位置に保定され、所定の位置でクリンプされ得る。クリンプリングは、エンドエフェクタ閉鎖スリーブの外側表面に対して外側本体部分を捕捉するように働く。隣接する組織の損傷及び/又はこれらの構成要素間における組織/流体などの集積を有利にも回避し得る、比較的滑らか又は連続した外側表面をエンドエフェクタ閉鎖スリーブに設けるために、クリンプリングは、エンドエフェクタ閉鎖スリーブに形成された環状陥凹部の中へと実際にクリンプされ得る。
In the illustrated configuration, the
開放カム350がエンドエフェクタ閉鎖スリーブ272に導入されているとき、各カムタブ358は、細長チャネル302の対応する外側壁322の細長スロット326を通じて延びて、アンビル310の対応するカムスロット318内に受容される。図6を参照されたい。そのような構成では、開放カム350は、エンドエフェクタ閉鎖スリーブ内で互いに直径方向に反対側にある。使用の際、閉鎖管260は、例えば、閉鎖トリガ32の作動に応答して、アンビル310を閉鎖するように遠位側(方向「DD」)に並進される。アンビル310は、エンドエフェクタ閉鎖スリーブ272の遠位端部275をアンビル本体312上の閉鎖リップ311と接触させるように、閉鎖管260が遠位方向「DD」に並進されるときに閉鎖される。具体的に言えば、エンドエフェクタ閉鎖スリーブ272の遠位端部275は、閉鎖管260が遠位側に移動されてアンビル310を閉鎖位置へと枢動させ始めるときに、アンビル取付けアーム316の上面321に乗りかかる。例えば、一構成において、アンビル310の閉鎖は、エンドエフェクタ閉鎖スリーブ272とアンビル310との接触によってのみ生じるものであり、開放カムとアンビルとの相互作用によって生じるものではない。他の構成では、しかしながら、開放カムは、閉鎖管260が遠位側に移動されるときにアンビルに閉鎖モーションをも加えるように構成され得る。アンビル310は、近位方向「PD」に閉鎖管260を近位側へ並進させることによって開放され、この並進は、図6及び7に示すように、カムタブ358をカム表面319上のカムスロット318内で近位方向「PD」に移動させて、アンビル310を開放位置へと枢動させるものである。
When the
外科用エンドエフェクタの実施形態300は、荷重下にあるときにもエンドエフェクタ顎部の確実な開放を実現するために、2つの開口カムを用いている。他の構成が、本発明の趣旨及び範囲から逸脱することなく、1つのみの開放カムを用いることも、3つ以上の開放カムを用いることも考えられ得る。図示の例では、開放カムは、細長シャフトアセンブリへの外科用エンドエフェクタ構成要素の容易な組付け又は取付け並びにその分解を促進するエンドエフェクタ閉鎖スリーブに着脱可能に装着されている。そのような構成はまた、患者の体内の限られた空間内における外科用エンドエフェクタのより良好な操作を更に促進する、より小型の又はより短い関節継手構成の使用を可能にする。定位置にスナップ嵌めされる開放カムの容易な取外しを促進するために、計画的に配置された付加的なホールがエンドエフェクタ閉鎖スリーブに設けられ、それを通じてプライ部材を挿入して、エンドエフェクタ閉鎖スリーブから開放カムを取り出すことを可能にし得る。更に他の構成では、開放カムは、アンビルアクチュエータ部材又はエンドエフェクタ閉鎖スリーブ内に一体的に形成され得る。例えば、開放カムはそれぞれタブを備え得るが、それらのタブは、アンビルアクチュエータ部材又はエンドエフェクタ閉鎖スリーブの壁に切り込まれるか又は別様にその壁の中に形成され、次いで、第2の顎部の上の対応するカム表面に係合するように、曲げられるか、クリンプされるか又は内向きに永久的に変形されるものである。例えば、タブは、エンドエフェクタ閉鎖スリーブの外壁に対して90度の角度で内向きに曲げられ得る。そのような構成により、別個の開放カム構成要素の必要性が回避される。他の変形形態では1本以上のピンが用いられ得るが、それらのピンは、第2の顎部に取り付けられ、第1の顎部上の対応するカム表面に乗りかかるように構成されるものである。ピンは、例えば、第1の顎部へと押圧され、刻みを付けられ、次いで第1の顎部に押圧及び/又は溶接され得る。上記で説明した開放カム構成は、外科用ステープルカートリッジを支持するように構成され、かつ外科用ステープルカートリッジに対して移動するように構成されたアンビルを含む外科用エンドエフェクタの状況で説明されているが、開放カム構成はまた、互いに対して移動可能である顎部を有する他のエンドエフェクタ構成と共に用いられ得ることが読者には明らかとなろう。
図9及び10は、上記で説明した細長シャフトアセンブリ200の特徴のうちの多数を取り入れた、200’と記された細長シャフトアセンブリを示している。図示の例では、細長シャフトアセンブリ200’は、上述の関節ロック350と類似した関節ロック810を用いた、800と記された二重関節リンク構成を含んでいる。関節ロック350の構成要素とは異なるものであり、かつ関節ロック350の動作を理解するのに必要となり得る関節ロック810の構成要素について、以下で更に詳細に説明することにする。関節ロック350に関する様々な詳細は、そのすべての開示内容が参照によって本明細書に組み込まれる、米国特許出願第13/803,086号、発明の名称「ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK」、現在の米国特許出願公開第2014/0263541号に見出され得る。関節ロック810は、様々な関節運動位置に外科用エンドエフェクタ300を選択的にロックするように構成及び操作され得る。かかる構成は、関節ロック810がそのロック解除状態にあるときに、外科用エンドエフェクタ300がシャフト閉鎖管260に対して回転、すなわち関節運動することを可能にする。
9 and 10 show an elongated shaft assembly marked 200', incorporating many of the features of the
上記で説明したように、近位関節ドライバ230がクラッチシステム400を介して発射部材220と作動的に係合されているとき、発射部材220は、近位関節ドライバ230を近位側及び/又は遠位側に移動させることができる。例えば、発射部材220が近位側に移動することにより、近位関節ドライバ230を近位側に移動させることができ、同様に、発射部材220が遠位側に移動することにより、近位関節ドライバ230を遠位側に移動させることができる。近位側か遠位側かに関わらず、近位関節ドライバ230が移動することにより、以下で更に詳細に説明するように、関節ロック810をロック解除することができる。例えば図9で分かるように、細長シャフトアセンブリ200’は、第1の遠位関節ドライバ820と幾分か同等の広がりを持つシャフトフレーム812を含んでいる。第1の遠位関節ドライバ820は、それに加えられた対応する関節運動制御モーションに応答して、遠位方向「DD」及び近位方向「PD」に選択的に長手方向に移動するように、細長シャフトアセンブリ200’内で支持される。シャフトフレーム812は、下向き突出枢動ピン(図示せず)をその上に有する遠位端部分814を含み、この下向き突出枢動ピンは、細長チャネル302の近位端部分320に形成された枢動ホール328内に枢動的に受容されるように適合されている。例えば、図5に示す同様の構成を参照されたい。かかる構成により、枢動ホール328によって規定される関節運動軸線B−Bを中心としたシャフトフレーム812に対する外科用エンドエフェクタ300の細長チャネル302の枢動的移動が促進される。上記に示すように、関節運動軸線B−Bは、細長シャフトアセンブリ200’によって規定されるシャフト軸線SA−SAを横切っている。
As described above, when the proximal
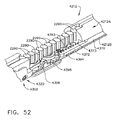
再び図9を参照すると、第1の遠位関節ドライバ820は、第1の又は遠位のロック空洞822と、第2の又は近位のロック空洞824とを含み、第1のロック空洞822と第2のロック空洞824は中間フレーム部材825によって分離され得る。関節ロック810は、少なくとも部分的に第1のロック空洞822の中に配置された少なくとも1つの第1のロック要素826を更に含むことができ、この第1のロック要素826は、第1の遠位関節ドライバ820が近位に移動することを抑制又は防止するように構成され得る。例えば、図9に示す実施形態では、第1のロック空洞822内に配置された第1のロック要素826が3つあり、これら第1のロック要素826は、すべて同様の並列方式で作用することができ、また単一のロック要素として協働的に作用することができる。4つ以上又は2つ以下の第1のロック要素826を利用できる他の実施形態も考えられる。同様に、関節ロック810は、少なくとも部分的に第2のロック空洞824の中に配置された少なくとも1つの第2のロック要素828を更に含むことができ、この第2のロック要素824は、第1の遠位関節ドライバ820が遠位側に移動することを抑制又は防止するように構成され得る。図9に示す特定の実施形態に関して言えば、第2のロック空洞824内に配置された第2のロック要素828が3つあり、これら第2のロック要素828は、すべて同様の並列方式で作用することができ、また単一のロック要素として協働的に作用することができる。4つ以上又は2つ以下の第2のロック要素828を利用できる他の実施形態も考えられる。
Referencing FIG. 9 again, the first distal
上記に加えて、主として図9を参照すると、各第1のロック要素826は、フレームレール830上で摺動可能に支持され、ロックタング827を含んでいる。第1のロック要素826の各々は、それを通じてフレームレール830を受容するためのロックアパーチャ(図示せず)を中に有している。ロックタング827は第1のロック空洞822内に配設され得、ロックアパーチャは、シャフトフレーム812に取り付けられたフレームレール830と摺動可能に係合され得る。第1のロック要素826は、フレームレール830との垂直な構成をなして方向付けられておらず、むしろ、第1のロック要素826は、フレームレール830に対して垂直でない角度をなして構成及び整合されており、そのため、ロックアパーチャの縁部又は側壁がフレームレール830と係合されるようになっている。更に、ロックアパーチャの側壁とフレームレール830との相互作用が、それらの間に抵抗力又は摩擦力を生じさせることができ、その抵抗力又は摩擦力は、第1のロック要素826とフレームレール830との相対運動を抑制し、結果として、第1の遠位関節ドライバ820に加えられる近位押力Pに抵抗することができる。換言すれば、第1のロック要素826は、外科用エンドエフェクタ300が矢印821で示す方向に回転するのを防止するか、又は少なくとも抑制することができる。トルクが矢印821の方向にエンドエフェクタ300に加えられる場合、近位押力Pが遠位関節ドライバ820に伝達されることになる。近位押力Pは、第1のロック要素826とフレームレール830とのロック係合を増強するようにのみ働くことになる。より具体的に言えば、近位押力Pは第1のロック要素826のタング827に伝達され得、タング827は、第1のロック要素826を回転させ、第1のロック要素826とフレームレール830との間に規定される角度を減少させ、結果として、ロックアパーチャの側壁とフレームレール830との間の食い込みを増加させることができる。最終的には、次いで第1のロック要素826は、一方向において第1の遠位関節ドライバ820の移動をロックすることができる。
In addition to the above, primarily with reference to FIG. 9, each
第1のロック要素826を解放し、外科用エンドエフェクタ300を矢印821で示される方向に回転させるために、近位関節ドライバ230は、第1のロック要素826を垂直な、又は少なくとも実質的に垂直な位置へと整直するか又は少なくとも実質的に整直するように、近位側に引っ張られ得る。そのような位置において、ロックアパーチャの側壁とフレームレール830との間の食い込み又は抵抗力は十分に低減又は排除され得、そのため第1の遠位関節ドライバ820は近位側に移動され得る。第1のロック要素826を整直するために、近位関節ドライバ230は近位側に引っ張られ得、そのため、近位関節ドライバ230の遠位アーム233が第1のロック要素826と接触して、第1のロック要素826を整直位置へと引っ張り、回転させる。様々な状況において、近位関節ドライバ230は、それから延びる近位アーム235が第1の遠位関節ドライバ820の近位駆動壁832に接触又は当接し、その遠位関節ドライバ820を近位側に引っ張って外科用エンドエフェクタ300を関節運動させるまで、引き続き近位側に引っ張られ得る。本質的に、近位引張力は、近位アーム235と近位駆動壁832との相互作用を通じて近位関節ドライバ230から遠位関節ドライバ820に加えられ得、そのような引張力が第1の遠位関節ドライバ820を通じてエンドエフェクタ300に伝達されて、以下で更に説明するように、エンドエフェクタ300を矢印821で示される方向に関節運動させ得る。外科用エンドエフェクタ300が矢印821の方向に好適に関節運動された後、関節ロック810が第1の遠位関節ドライバ820を、そして外科用エンドエフェクタ300を所定位置に再びロックできるように、第1の遠位関節ドライバ820は様々な状況において解放され得る。
In order to release the
上記と同時に、図9を再び参照するが、第2のロック要素828は、第1のロック要素826が上述のようにロック及びロック解除されている間、依然として斜行位置に留まることができる。読者に理解されたいこととして、第2のロック要素828はシャフトレール830に対して斜行位置に配列及び整合されているが、第2のロック要素828は、第1の遠位関節ドライバ820の近位側へのモーションを妨害するか、又は少なくとも実質的に妨害するように構成されていない。第1の遠位関節ドライバ820及び関節ロック810が上述のように近位側に摺動されるとき、第2のロック要素828は、様々な状況において、フレームレール830に対する斜行した整列を変化させるか、又は少なくとも実質的に変化させることなく、フレームレール830に沿って遠位側に摺動することができる。第2のロック要素828は第1の遠位関節ドライバ820及び関節ロック810が近位側に移動することを許容するが、第2のロック要素828は、更に以下でより詳細に議論するように、第1の遠位関節ドライバ820が遠位側に移動することを選択的に防止するか、又は少なくとも抑制するように構成され得る。
At the same time as above, with reference to FIG. 9 again, the
各第2のロック要素828は、ロックアパーチャ(図示せず)とロックタング829とを備え得る。ロックタング829は第2のロック空洞824内に配設され得、ロックアパーチャは、シャフトフレーム812に取り付けられたフレームレール830と摺動可能に係合され得る。フレームレール830は、第2のロック要素828のアパーチャを通じて延びている。第2のロック要素828は、フレームレール830との垂直な構成をなして方向付けられておらず、むしろ、第2のロック要素828は、フレームレール830に対して垂直でない角度をなして構成及び整合されており、そのため、ロックアパーチャの縁部又は側壁がフレームレール830と係合されるようになっている。更に、ロックアパーチャの側壁とフレームレール830との相互作用が、それらの間に抵抗力又は摩擦力を生じさせることができ、その抵抗力又は摩擦力は、第2のロック要素828とフレームレール830との相対運動を抑制し、結果として、第1の遠位関節ドライバ820に加えられる遠位力Dに抵抗することができる。換言すれば、第2のロック要素828は、外科用エンドエフェクタ300が矢印823で示す方向に回転するのを防止するか、又は少なくとも抑制することができる。トルクが矢印823の方向にエンドエフェクタ300に加えられる場合、遠位引張力Dが第1の遠位関節ドライバ820に伝達されることになる。遠位引張力Dは、第2のロック要素828とフレームレール830とのロック係合を増強するようにのみ働くことになる。より具体的には、遠位引張力Dは第2のロック要素828のタング829に伝達されることができ、タング8298は、第2のロック要素828を回転させ、第2のロック要素828とフレームレール830との間に規定される角度を減少させ、結果として、ロックアパーチャの側壁とフレームレール830との間の食い込みを増加させることができる。最終的には、次いで第2のロック要素828は、一方向において第1の遠位関節ドライバ820の移動をロックすることができる。
Each
第2のロック要素828を解放し、外科用エンドエフェクタ300を矢印823で示される方向に関節運動させるために、近位関節ドライバ230は、第2のロック要素828を垂直な、又は少なくとも実質的に垂直な位置へと整直するか又は少なくとも実質的に整直するように、遠位側に押され得る。そのような位置において、ロックアパーチャの側壁とフレームレール830との間の食い込み又は抵抗力は十分に低減又は排除され得、そのため第1の遠位関節ドライバ820は遠位側に移動され得る。第2のロック要素828を整直するために、近位関節ドライバ230は遠位側に押され得、そのため、近位関節ドライバ230の近位アーム235が第2のロック要素828と接触して、第2のロック要素828を整直位置へと押し込み、回転させる。様々な状況において、近位関節ドライバ230は、それから延びる近位アーム233が第1の遠位関節ドライバ820の遠位駆動壁833に接触又は当接し、その第1の遠位関節ドライバ820を遠位側に押して外科用エンドエフェクタ300を関節運動させるまで、引き続き遠位側に押され得る。本質的に、遠位押力は、遠位アーム233と遠位駆動壁833との相互作用を通じて近位関節ドライバ230から第1の遠位関節ドライバ820に加えられることができ、そのような押力が第1の遠位関節ドライバ820を通じて伝達されて、エンドエフェクタ300を矢印823で示される方向に関節運動させることができる。外科用エンドエフェクタ300が矢印823の方向に好適に関節運動された後、関節ロック810が第1の遠位関節ドライバ820を、そして外科用エンドエフェクタ300を所定位置に再びロックできるように、第1の遠位関節ドライバ820は様々な状況において解放され得る。
To release the
上記と同時に、第1のロック要素826は、第2のロック要素828が上述のようにロック及びロック解除されている間、依然として斜行位置に留まることができる。読者に理解されたいこととして、第1のロック要素826はシャフトレール830に対して斜行位置に配列及び整合されているが、第1のロック要素826は、第1の遠位関節ドライバ820の遠位側へのモーションを妨害するか、又は少なくとも実質的に妨害するように構成されていない。第1の遠位関節ドライバ820及び関節ロック810が上述のように遠位側に摺動されるとき、第1のロック要素826は、様々な状況において、フレームレール830に対する斜行した整列を変化させるか、又は少なくとも実質的に変化させることなく、フレームレール830に沿って遠位側に摺動することができる。第1のロック要素826は第1の遠位関節ドライバ820及び関節ロック810が遠位側に移動することを許容するが、第1のロック要素826は、上記で説明したように、第1の遠位関節ドライバ820が近位側に移動することを選択的に防止するか、又は少なくとも抑制するように構成されている。
Simultaneously with the above, the
上記を鑑みると、関節ロック810は、ロック状態において、第1の遠位関節ドライバ820の近位側及び遠位側への移動に抵抗するように構成され得る。抵抗に関して言えば、関節ロック810は、第1の遠位関節ドライバ820の近位側及び遠位側への移動を防止するか、又は少なくとも実質的に防止するように構成され得る。総じて、上述のように、第1の遠位関節ドライバ820の近位側へのモーションは、第1のロック要素826がロック方向にあるときに、第1のロック要素826によって抵抗を受け、第1の遠位関節ドライバ820の遠位側へのモーションは、第2のロック要素828がロック方向にあるときに、第2のロック要素828によって抵抗を受ける。換言すれば、第1のロック要素826は第1の一方向ロックを備え、第2のロック要素828は、その反対方向にロックする第2の一方向ロックを備える。
In view of the above, the
図9及び10に示した例示的な実施形態に関連して議論したが、近位関節ドライバ230の初期の近位側への移動により、第1の遠位関節ドライバ820及び関節ロック810の近位側への移動をロック解除することができる一方で、近位関節ドライバ230の更なる近位側への移動により、第1の遠位関節ドライバ820及び関節ロック810を近位側に駆動することができる。同様に、近位関節ドライバ230の初期の遠位側への移動により、第1の遠位関節ドライバ820及び関節ロック810の遠位側への移動をロック解除することができる一方で、近位関節ドライバ230の更なる遠位側への移動により、第1の遠位関節ドライバ820及び関節ロック810を遠位側に駆動することができる。そのような全体的な構想については、以下で開示するいくつかの更なる例示的な実施形態と関連させて議論する。そのような議論が、上に示した議論と同じであるか、又は概ね重複する限りにおいて、簡潔にするためにそのような議論を再現しない。
Although discussed in connection with the exemplary embodiments shown in FIGS. 9 and 10, due to the initial proximal movement of the proximal
依然として図9及び10を参照すると、二重関節リンク構成800は、関節運動力が第1の遠位関節ドライバ820を通じて加えられたときに「プッシュ/プル」構成を確立するように構成されている。これらの図で分かるように、第1の遠位関節ドライバ820は、その中に第1の駆動ラック842を形成されている。第1の関節ロッド844が第1の遠位関節ドライバ820から遠位側に突出しており、第1の玉継手852によって第1の遠位関節ドライバ820に取り付けられる第1の可動カプラ850に取り付けられている。第1のカプラ850はまた、図9で分かるように、第1のピン854によって細長チャネル302の近位端部分320に枢動的にピン留めされている。二重関節リンク構成800は、第2の駆動ラック862を中に形成された第2の遠位関節ドライバ860を更に備えている。第2の遠位関節ドライバ860は、遠位方向「DD」及び近位方向「PD」に長手方向に移動するように、細長シャフトアセンブリ200’内で移動可能に支持されている。第2の関節ロッド864が第2の遠位関節ドライバ860から遠位側に突出しており、第2の玉継手872によって第2の遠位関節ドライバ860に取り付けられる第2の可動カプラ870に取り付けられている。第2のカプラ870はまた、図9で分かるように、第2のピン874によって細長チャネル302の近位端部分320に枢動的にピン留めされている。図9で分かるように、第1のカプラ850は、シャフト軸線SAの一方の外側部で細長チャネル302に取り付けられ、第2のカプラ870はシャフト軸線のその反対の外側部で細長チャネル302に取り付けられている。したがって、カプラ850、870の一方を引くと同時にもう一方のカプラ850、870を押すことによって、外科用エンドエフェクタ300は、細長シャフトアセンブリ200’に対して、関節運動軸線B−Bを中心として関節運動されることになる。図示の構成では、第1の遠位関節ドライバ820と第2の遠位関節ドライバ860との相対運動をそれぞれ促進するカプラ850、870、及び細長チャネル302は、比較的硬質の成分から製作されているが、他の構成が比較的「軟質の」カプラ構成を用いてもよい。例えば、ケーブルなどが、細長チャネルに結合されるように、遠位関節ドライバ820、860、カプラ850、870及び玉継手852、872の一方又は両方を通じて延びて、それらへの関節運動モーションの伝達を促進するようにしてもよい。
Still referring to FIGS. 9 and 10, the double
同様に図9及び10から分かるように、近位ピニオンギヤ880及び遠位ピニオンギヤ882が第1の駆動ラック842と第2の駆動ラック862との間の中心に配設され、それらとの噛合い係合をなしている。代替的な実施形態では、1つのみのピニオンギヤ又は3つ以上のピニオンギヤが用いられてもよい。したがって、少なくとも1つのピニオンギヤが用いられる。近位ピニオンギヤ880及び遠位ピニオンギヤ882は、シャフトフレーム812内でそれらに対して自在に回転するように回転可能に支持されており、そのため、第1の遠位関節ドライバ820が遠位方向「DD」に移動されるとき、ピニオンギヤ870、872は第2の遠位関節ドライバ860を近位方向「PD」に駆動するように働く。同様に、第1の遠位関節ドライバ820が近位方向「PD」に引かれると、ピニオンギヤ880、882は第2の遠位関節ドライバ860を遠位方向「DD」に駆動する。したがって、関節運動軸線B−Bを中心として矢印821の方向にエンドエフェクタ300を関節運動させるために、関節ドライバ230は、クラッチシステム400を介して発射部材220と作動的に係合され、それにより、発射部材220は近位関節ドライバ230を近位方向「PD」に移動させるか又は引く。近位関節ドライバ230が近位方向に移動することにより、第1の遠位関節ドライバ820が同様に近位方向に移動する。第1の遠位関節ドライバ820が近位方向に移動するとき、ピニオンギヤ880、882は第2の遠位関節ドライバ860を遠位方向「DD」に駆動するように働く。第1及び第2の遠位関節ドライバ820、860がそのように移動することにより、外科用エンドエフェクタ300が、より具体的には外科用エンドエフェクタ300の細長チャネル302が、関節運動軸線B−Bを中心として矢印821の関節運動方向に枢動することになる。逆に言えば、エンドエフェクタ300を矢印823の方向に関節運動させるために、発射部材220は、第1の遠位関節ドライバ820を遠位方向「DD」に押すように作動される。第1の遠位関節ドライバ820が遠位方向に移動するとき、ピニオンギヤ880、882は第2の遠位関節ドライバ860を近位方向「PD」に駆動するように働く。第1及び第2の遠位関節ドライバ820、860がそのように移動することにより、外科用エンドエフェクタ300が、より具体的には外科用エンドエフェクタ300の細長チャネル302が、関節運動軸線B−Bを中心として矢印823の関節運動方向に枢動することになる。
Similarly, as can be seen from FIGS. 9 and 10, the
二重一体リンク関節構成800及びその変形形態は、他の関節運動式外科用エンドエフェクタの構成と比較すると、より広範囲の関節運動を外科用エンドエフェクタにもたらし得る。具体的に言えば、本明細書で開示する一体リンク関節構成は、他の関節運動式エンドエフェクタ構成によって一般的に達成される、45〜50度の範囲を超える関節運動範囲を促進し得る。エンドエフェクタが定位置に「押されること」及び「引かれること」が可能となるように、遠位関節ドライバ同士の間でインターフェースするために少なくとも1つのピニオンギヤを使用することはまた、使用中におけるエンドエフェクタの「こぼし(slop)」又は不所望な若しくは意図しない移動の大きさを低減することになり得る。本明細書で開示する二重一体リンク関節構成はまた、他の関節運動システム構成と比較して、強度特性を改善させた関節運動システムを備えている。
The dual integrated link
上記で簡潔に説明したように、中間発射シャフト部分222は、遠位切断又は発射ビーム280と作動的にインターフェースするように構成されている。遠位発射ビーム280は積層構造を備えてもよい。そのような構成により、遠位発射ビーム280は、外科用エンドエフェクタ300が関節運動軸線B−Bを中心として関節運動されるときに十分に屈曲することが可能となる。遠位発射ビーム280は、シャフトアセンブリ200’内で軸方向移動するように支持され、細長チャネル302の近位端部上に形成された2つの直立側方支持壁330によって摺動可能に支持される。図11を参照すると、遠位発射ビーム280は、垂直に延出する発射部材本体902を含む発射部材900に取り付けられ、その発射部材本体902は組織切断面又はブレード904をその上に有している。加えて、発射部材900との駆動接触のため、ウェッジスレッド910が外科用ステープルカートリッジ304内に装着されていてよい。発射部材900がカートリッジ本体304を通じて遠位側に駆動されると、ウェッジスレッド910のウェッジ面912がステープルドライバに接触して、ドライバ及びその上に支持された外科用ステープルを外科用ステープルカートリッジ304内で上向きに作動させる。
As briefly described above, the intermediate
発射ビーム又は発射部材を使用し、ある範囲、例えば45度にわたって関節運動可能であるエンドエフェクタは、克服すべき多くの課題を有し得る。かかるエンドエフェクタの動作可能な関節運動を容易にするため、発射部材又は発射ビームは、かかる範囲の関節運動に適応するため、十分に可撓性でなくてはならない。しかしながら、発射ビーム又は発射部材はまた、圧縮性の発射荷重がかかっている間の座屈も避けなくてはならない。発射ビーム又は発射部材に対する更なる支持を提供するため、様々な「支持」又は「吹出」プレート構成が開発されている。いくつかのかかる構成は、米国特許第6,964,363号、発明の名称「SURGICAL STAPLING INSTRUMENT HAVING ARTICULATION JOINT SUPPORT PLATES FOR SUPPORTING A FIRING BAR」及び同第7,213,736号、発明の名称「SURGICAL STAPLING INSTRUMENT INCORPORATING AN ELECTROACTIVE POLYMER ACTUATED FIRING BAR TRACK THROUGH AN ARTICULATION JOINT」に開示されており、それぞれの開示全体が、参照により本明細書に組み込まれる。実質的な耐座屈性を提供する吹出プレートは、一般的に曲げにくくもあり、これによって関節継手システムが対応しなければならない力を加える。他の発射ビーム支持構成が、その開示内容の全体が参照により本明細書に組み込まれる、米国特許出願第14/575,117号、発明の名称「SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS」に開示されている。 An end effector that uses a firing beam or launching member and is capable of joint movement over a range, eg, 45 degrees, can have many challenges to overcome. To facilitate the operable joint movement of such end effectors, the launching member or firing beam must be sufficiently flexible to adapt to such range of joint movement. However, the firing beam or launching member must also avoid buckling during compressive firing loads. Various "support" or "blowing" plate configurations have been developed to provide additional support for the firing beam or launching member. Some such configurations are described in US Pat. No. 6,964,363, titles of the invention "SURGICAL STAPLING INSTRUMENT HAVING ARTICULATION JOINT SUPPORT PLATES FOR SUPPORTING A FIRING BAR" and titles 736. STAPLING INSTRUMENT INCORPORTING AN ELECTROACTIVE POLYMER ACTURATED FIRING BAR TRACK THROUGH AN ARTICULATION JOINT, the entire disclosure of which is incorporated herein by reference. Blow-out plates that provide substantial buckling resistance are also generally difficult to bend, which adds the force that the articulated joint system must handle. Other firing beam support configurations are incorporated herein by reference in their entirety, U.S. Patent Application No. 14 / 575,117, title of the invention "SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAMSULP. Is disclosed in.
図11〜15を参照すると、細長シャフトアセンブリ200’は、外科用エンドエフェクタ300が関節運動軸線B−Bを中心として関節運動されるときに遠位発射ビーム280を横方向に支持するための複数の支持リンクアセンブリ920を更に備えている。図11で分かるように、複数の支持リンクアセンブリ920は、外科用エンドエフェクタ300並びに細長シャフトアセンブリ200’に移動可能に結合される中央支持部材922を備えている。例えば、中央支持部材922は、細長チャネル302の近位端部320に枢動的にピン留めされ、そのため、枢動軸線PAを中心として近位端部320に対して枢動可能となっている。図11で分かるように、中央支持部材922は遠位突出タブ923を含み、この遠位突出タブ923は、細長チャネル302の近位端部分320上に形成された直立支持ピン332を受容するための遠位枢動ホール924を有している。図11から更に分かるように、中央支持部材922は近位突出タブ926を更に含み、この近位突出タブ926は細長の近位スロット928を有している。この近位スロット928は、フレーム部分812上に形成された中央支持ピン816を摺動可能に受容するように構成されている。そのような構成により、中央支持部材922は、例えば、枢動すると共に、上記細長シャフトアセンブリ200’に対して軸方向に移動することが可能となる。図11〜13で分かるように、中央支持部材922は、それを通じて遠位発射ビーム280を移動可能に受容するための中央配設スロット930を更に含んでいる。
Referring to FIGS. 11-15, the elongated shaft assembly 200'is a plurality for laterally supporting the
依然として図11〜15を参照すると、複数の支持リンクアセンブリ920が、近位支持リンク940と遠位支持リンク950とを更に備えている。近位支持リンク940は、丸形近位ノーズ部分943と丸形遠位ノーズ部分944とを有する細長近位本体942を含む。近位支持リンク940は、一対の下向き突出対向近位支持壁945、946を更に含み、それらの間に近位スロット947を画定する。同様に、遠位支持リンク950は、丸形近位ノーズ部分953と丸形遠位ノーズ部分954とを有する細長遠位本体952を含む。遠位支持リンク950は、一対の下向き突出対向遠位支持壁955、956を更に含み、それらの間に遠位スロット957を画定する。図14で分かるように、軟質の遠位発射ビーム280は、近位支持リンク940の近位支持壁945、946と遠位支持リンク950の遠位支持壁955、956との間に延びるように構成されている。近位支持壁945は、内向きの近位弓形表面948を含み、近位支持壁946は、前記内向きの近位弓形表面948と対向する内向きの近位弓形支持表面949を含む。近位弓形支持表面948、949は、軟質の遠位発射ビーム280がエンドエフェクタの関節運動の間に屈曲し、関節継手を横断するとき、軟質の遠位発射ビーム280の近位部分の外側部分を横方向に支持するように働く。丸みの付いた表面は、関節運動の方向に応じて遠位発射ビーム280の外径に適合し得る。同様に、遠位支持壁955は、内向きの遠位弓形表面958を含み、遠位支持壁956は、その遠位弓形表面958と対向する内向きの遠位弓形支持表面959を含む。遠位弓形支持表面958、959は、遠位発射ビーム280がエンドエフェクタ300の関節運動の間に屈曲し、関節継手を横断するとき、遠位発射ビーム280の遠位部分の外側部分を横方向に支持するように働く。遠位弓形表面958、959は、関節運動の方向に応じて遠位発射ビーム280の外径に適合し得る。図12及び13で分かるように、シャフトスパイン210の遠位端部217は、近位支持リンク940の丸形近位ノーズ部分943が中に延びる遠位向き弓形スパインポケット218を含んでいる。近位支持リンク940の丸形遠位ノーズ部分944は、中央支持部材922の弓形近位ポケット932内に枢動的に受容される。加えて、遠位支持リンクの丸形近位ノーズ部分953は、中央支持部材922の遠位端部の弓形遠位支持部材ポケット934内に受容される。遠位支持リンク950の丸形遠位ノーズ部分954は、細長チャネル302の近位端部320上に形成された直立側方支持壁330内に形成されたV字形状のチャネル空洞334内に移動可能に受容される。
Still referring to FIGS. 11-15, the plurality of
複数の支持リンケージアセンブリは、可撓性発射ビーム積層体により高度な側方支持を、そのビームがより高度な関節運動角度にわたって屈曲するときにもたらし得る。そのような構成はまた、発射ビームが高度な発射荷重下で比較的高度な関節運動角度にわたって座屈することを防止することになる。細長支持リンクは、中央支持部材と共に、多くの従来の支持構成と比べて、改善された側方支持を関節運動ゾーンの全体にわたって発射ビームにもたらすように働く。代替的な構成では、支持リンクは、様々な関節運動角度で中央支持部材と実際に連動するように構成されてもよい。U字形状の支持リンクは、容易な導入を促進し、軟質の支持ビームをビームの各外側部だけでなく上部においても支持して、発射ビームが発射中関節運動される間に上向きに反ることを防止する。 Multiple support linkage assemblies can provide a high degree of lateral support due to the flexible firing beam laminate as the beam bends over a higher degree of joint motion angle. Such a configuration will also prevent the firing beam from buckling over relatively high joint motion angles under high firing loads. The elongated support link, along with the central support member, serves to provide improved lateral support to the launch beam throughout the articular motion zone as compared to many conventional support configurations. In an alternative configuration, the support links may be configured to actually interlock with the central support member at various joint motion angles. The U-shaped support link facilitates easy introduction and supports the soft support beam not only at each lateral part of the beam but also at the top, and warps upward while the firing beam is articulated during firing. To prevent that.
発射部材が組織切断面を含む実施形態では、未使用のステープルカートリッジが外科用エンドエフェクタ300の細長チャネル302内で適切に支持されていなければ発射部材が誤って前進することを防止するような方式で、細長シャフトアセンブリが構成されることが望ましくなり得る。例えば、ステープルカートリッジが全く存在せず、発射部材がエンドエフェクタを通じて遠位側に前進される場合、組織は切断はされるが、ステープル留めはされない。同様に、使用済みのステープルカートリッジ(すなわち、ステープルの少なくともいくつかが既に発射されているステープルカートリッジ)がエンドエフェクタに存在し、発射部材が前進される場合、組織は切断はされることになるが、ステープル留めはされるとしても完全にはされない可能性がある。そのような現象の発生は、外科手技の間における不所望な破局的結果につながり得ることが明らかとなろう。米国特許第6,988,649号、発明の名称「SURGICAL STAPLING INSTRUMENT HAVING A SPENT CARTRIDGE LOCKOUT」、同第7,044,352号、発明の名称「SURGICAL STAPLING INSTRUMENT HAVING A SINGLE LOCKOUT MECHANISM FOR PREVENTION OF FIRING」、及び同第7,380,695号、発明の名称「SURGICAL STAPLING INSTRUMENT HAVING A SINGLE LOCKOUT MECHANISM FOR PREVENTION OF FIRING」はそれぞれ、様々な発射部材ロックアウト構成を開示している。これらの米国特許はそれぞれ、その全体内容が参照により本明細書に組み込まれる。
In embodiments where the launching member comprises a tissue cut surface, a method that prevents the launching member from accidentally advancing if the unused staple cartridge is not properly supported within the
そのようなロックアウト構成は、様々な外科用ステープル留め器具と共に有効に用いられ得る。そのような構成はしかしながら、比較的小型で短い関節継手構成を用いる、本明細書で開示する様々な外科用ステープル留め器具と関連させた使用には特に好適でない場合もある。例えば、図15〜19は、細長シャフトアセンブリ200’に関節継手270’によって作動的に取り付けられる外科用エンドエフェクタ300を示している。細長シャフトアセンブリ200’はシャフト軸線SA−SAを規定し、関節継手270’は、シャフト軸線SA−SAを横断する関節運動軸線B−Bを中心とした、細長シャフトアセンブリ200’に対する外科用エンドエフェクタ300の選択的な関節運動を促進する。図示の実施形態では、二重一体リンク関節構成800は(上述の通り)、関節運動モーションを外科用エンドエフェクタ300に選択的に加えるために用いられ得る。細長シャフトアセンブリ200’は、上記で説明したタイプの遠位発射ビーム280を備えており、この遠位発射ビーム280は、それに発射モーションが加えられると、開始位置から終了位置へと外科用エンドエフェクタ300内で選択的に軸方向に移動可能である。遠位発射ビーム280は、関節継手270’を通じて延びており、本明細書で説明する様々な方式における外科用エンドエフェクタ300の関節運動に適応するために、関節運動軸線B−Bを中心として屈曲するように構成されている。図示の実施形態では、関節継手270’は、シャフトフレーム812の遠位端部814及び細長チャネル302の近位端部320に移動可能に取り付けられた中央支持部材922を含む。上記で説明したように、中央支持部材922は遠位突出タブ923を有し、この遠位突出タブ923は、細長チャネル302の近位端部分320上に形成された直立支持ピン332を受容するための遠位枢動ホール924を有している。中央支持部材922は近位突出タブ926を更に含み、この近位突出タブ926は細長の近位スロット928を有している。この近位スロット928は、フレーム部分812上に形成された中央支持ピン816を摺動可能に受容するように構成されている。中央支持体922は、それを通じて遠位発射ビーム280を軸方向に受容するための中央配設スロット930を更に含む。中央支持部材922は、発射の間に遠位発射ビーム280の軸方向通路を促進すると同時に、関節運動軸線B−Bを中心とした外科用エンドエフェクタ300の関節運動の間に、遠位発射ビーム280を横方向に支持する。
Such a lockout configuration can be effectively used with various surgical staple fasteners. Such configurations, however, may not be particularly suitable for use in connection with the various surgical staple fastening instruments disclosed herein, using relatively small and short articulated joint configurations. For example, FIGS. 15-19 show a
図示の実施形態では、未発射の外科用ステープルカートリッジ304がカートリッジ支持部材又は細長チャネル302内に動作可能に着座されていない限り、遠位発射ビーム280が開始位置から終了位置へと誤って前進されることを防止するために、発射ビームロックアセンブリ980が用いられている。図15〜19で分かるように、一形態における発射ビームロックアセンブリ980は、遠位発射ビーム280の上面から上向きに突出するように遠位発射ビーム280に形成されたロックカム又はデテント281を含んでいる。付勢部材984が中央支持部材922上で支持され、かつ中央支持部材922に取り付けられている。図16で分かるように、例えば、付勢部材984は実質的に平面的であり、外科用エンドエフェクタ300の関節運動の間にロックカム281を中に収容するように構成された窓985を含んでいる。したがって、外科用エンドエフェクタ300が関節運動軸線B−Bを中心として関節運動されるとき、付勢部材984は、いかなる付勢力も荷重も遠位発射ビーム280に加えることがない。この特徴により、関節運動軸線B−Bを中心として外科用エンドエフェクタ300を関節運動させるために生成されなければならない関節運動力の大きさの増大が回避され得る。この付勢部材984は、中央支持部材922にタック溶接されてもよく、又は、ねじ、ピン、接着剤などの他の締結方法によって中央支持部材922に取り付けられてもよい。窓985はまた、遠位発射ビーム280が開始位置にあるときにロックカム281と接触するように働くロックバンド又は部分986を画定し得る。ロックカム281は、遠位発射ビーム280を軸方向に移動させるために必要となる発射力及び後退力の大きさを低減するように、遠位向き傾斜表面283及び近位向き傾斜表面285を伴って形成され得る。図19を参照されたい。
In the illustrated embodiment, the
上記で説明したように、遠位発射ビーム280は、発射部材本体902上に組織切断表面904を含む発射部材900に動作可能に取り付けられている。代替的な構成では、組織切断表面は、遠位発射ビーム280の一部分に取り付けられてもよく、又は別様にその一部分の上に形成されるか若しくはその一部分によって直接的に支持されてもよい。図示の構成では、側方に延びるフット905が発射部材本体902の底部に形成されている。発射部材本体902は、ウェッジスレッド係合部材906を更に含み、このウェッジスレッド係合部材906は、以下で更に詳細に論じるように、外科用ステープルカートリッジ304内のウェッジスレッドと係合するように構成されている。
As described above, the
図18は、細長チャネル302内に適切に導入された「未使用」又は「未発射」の外科用ステープルカートリッジ304を示している。この図で分かるように、ウェッジスレッド910は、外科用ステープルカートリッジ304内の「未発射」(最近位)の位置に配置されている。ウェッジスレッド910は、発射部材900上のウェッジスレッド係合部材906と係合して、それによって発射部材900を矢印988で表される上向きの方向に付勢するように構成された近位向き傾斜表面914を含み、そのため、発射部材900の底面部分及びフット905は、細長チャネル302の底部のロック開口部303によって形成されたロック壁307を自在に通過するようになっている。その位置にあるとき、遠位発射ビーム280及び発射部材900は、細長チャネル302内で、またより正確にはその中に装着された外科用ステープルカートリッジ304内で、図18に示す開始位置から、外科用ステープルカートリッジ304内で動作可能に支持された外科用ステープルのすべてをウェッジスレッド910が排出し終える外科用ステープルカートリッジ304内の終了位置へと遠位側に前進され得る。そのような構成では、発射部材900が完全に発射された(すなわち、外科用ステープルカートリッジ304内で開始位置から終了位置へと完全に前進された)後、発射部材900は、図19に示す開始位置へと再び後退される。ウェッジスレッド910は、発射部材900によってステープルカートリッジ304内で終了位置へと遠位側に前進されており、発射部材900はウェッジスレッド910に取り付けられていないため、発射部材900が再び開始位置へと後退されるとき、ウェッジスレッド910は、外科用ステープルカートリッジ304内で依然として終了位置にあり、発射部材900を再び開始位置に復帰させることはない。したがって、外科用ステープルカートリッジ304は、「使用後」、「使用済み」、又は「発射」状態にあると言われる。図19で分かるように、ウェッジスレッドが未発射状態にないとき、本体部分902の底部並びに発射部材900のフット905は、付勢部材984のロックバンド986によって遠位発射ビーム280上のロックカム281に加えられる付勢モーションによって、細長チャネル302の底部のロック開口部303の中へと延びる。その位置にあるとき、臨床医が使用済み外科用ステープルカートリッジを故意に再発射しようと試みた場合、本体部分902及び/又はフット905は細長チャネル302の壁307と接触することになり、また開始位置から終了位置へと移動することを防止されることになる。したがって、発射ビームロックアセンブリ980は、未発射の又は未使用の外科用ステープルカートリッジが外科用エンドエフェクタの細長チャネル内に適切に/動作可能に導入されていない場合、遠位発射ビーム280並びに発射部材900が開始位置から終了位置へと前進することを防止する。また、ステープルカートリッジが細長チャネル302内に全く導入されていないときに、発射ビームロックアセンブリ980が遠位発射ビーム280の前進を防止することも明らかとなろう。外科用エンドエフェクタを関節運動させるための関節運動力を増大させることが結果として必要となり得る、遠位発射ビームへの付加的な荷重の加力なしに、関節運動軸線B−Bを中心とした外科用エンドエフェクタ300の関節運動に適応することに加えて、発射ビームロックアセンブリ980は、エンドエフェクタ顎部が開放されているか閉鎖されているかに関わらず、ロックアウト壁を越えて遠位側に前進されると、発射部材及び/又は遠位発射ビームに付加的な荷重を加えることがない。
FIG. 18 shows an "unused" or "unfired" surgical
図20Aは、エンドエフェクタ閉鎖スリーブ272内に装着された付勢部材984’を備える発射ビームロックアセンブリ980’を用いた別の関節運動式外科用エンドエフェクタの実施形態300’を示している。この図で分かるように、例えば、付勢部材984’は、遠位発射ビーム280’の傾斜又はテーパ付き部分283’に付勢力を加える。発射ビームロックアセンブリ980’はその他の点では、発射ビームロックアセンブリ980’に関して上記で説明した方式と同じ方式で動作する。より具体的に言えば、付勢部材984’は、遠位発射ビーム280’及びそれに取り付けられた発射部材を細長チャネル内で下向きに押しやる付勢力を遠位発射ビーム280’に加える。未使用の外科用ステープルカートリッジが、ウェッジスレッド又は他のステープルエジェクタ部材が未発射位置にある状態で、発射部材/発射ビームを移動させてロック壁との係合から外すために発射部材又は発射ビームと動作可能に係合するように、細長チャネル又はカートリッジ支持部材内に適切に導入されていない場合、発射部材/発射ビームは、開始位置から終了位置へと軸方向に前進されることを防止されることになる。
FIG. 20A shows another embodiment 300'of a joint motion surgical end effector using a firing beam lock assembly 980'with an urging member 984' mounted within an end
図21〜25は、以下で更に詳細に説明する様々な違いを除いて、上記で説明した細長シャフトアセンブリ200と類似した別の細長シャフトアセンブリ1200の一部分を示している。上記で詳細に説明した細長シャフトアセンブリ1200の構成要素は、簡潔にするために、同様の要素符号で参照されており、例えば、上記で説明した外科用器具10の各部分と共に用いられるとき、シャフトアセンブリ1200の動作を理解するのに必要となり得る範囲を越えてまで詳細には更に説明しないことにする。図21で分かるように、細長シャフトアセンブリ1200は関節ロック1810を含み、この関節ロック1810は、関節ロック810と実質的に同等であり、本質的に同様の方式で動作するものである。図22で分かるように、細長シャフトアセンブリ1200はシャフトフレーム1812を含み、このシャフトフレーム1812は、第1の遠位関節ドライバ1820の近位部分1821を中に移動可能に支持するように構成された近位空洞1815を有している。第1の遠位関節ドライバ1820は、それに加えられた関節運動制御モーションに応答して、遠位方向「DD」及び近位方向「PD」に選択的に長手方向に移動するように、細長シャフトアセンブリ1200内で移動可能に支持されている。シャフトフレーム1812は、枢動ピン1818をその上に形成された遠位端部分1814を更に含む。枢動ピン1818は、外科用エンドエフェクタ1300の細長チャネル1302の近位端部分1320の枢動ホール(図示せず)内に枢動的に受容されるように適合されている。そのような構成により、枢動ホール及びピン1818によって規定される関節運動軸線B−Bを中心とした、シャフトフレーム1812に対する細長チャネル1302の枢動移動(すなわち関節運動)が促進される。シャフトフレーム1812は、中央配設空洞1817と、遠位ノッチ1819とを更に含み、遠位ノッチ1819は遠位端部1814と中央配設空洞1817との間に配置されている。
21-25 show a portion of another
シャフトアセンブリ1200は、第2の遠位関節ドライバ1860を更に含み、この第2の遠位関節ドライバ1860は、近位プーリ1840及び遠位プーリ1340上で回転可能に軸支されるエンドレス部材1862を備える。依然として図22を参照すると、近位プーリ1840は、プーリスピンドル1842上に回転可能に軸支され、プーリスピンドル1842は、シャフトフレーム1812内の中央配設空洞1817内に装着される。遠位プーリ1340は、外科用エンドエフェクタ1300の細長チャネル1302の近位端部1320上に回転不能に支持又は形成される。一形態では、エンドレス部材1862は、例えば、ステンレス鋼、タングステン、アルミニウム、チタンなどから製作されたケーブルを備える。ケーブルは、所望のレベルの引張強度及び可撓性を得るために、様々な本数の撚線を有する網組又は多重撚線構造をなしてよい。様々な構成では、例えば、ケーブル2382は、0.08センチメートル〜0.20センチメートル(0.03インチ〜0.08インチ)の範囲、より好ましくは0.13センチメートル〜0.20センチメートル(0.05インチ〜0.08インチ)の範囲の直径を有し得る。好ましいケーブルは、例えば、半硬質から完全硬質の300系ステンレス鋼から製作され得る。様々な構成において、ケーブルはまた、例えば、潤滑性を改善するため及び/又は伸張を低減するために、例えば、テフロン(登録商標)、銅などでコーティングされ得る。例えばクリンプ加工によって、第1のラグ1863がケーブルの一方の端部に取り付けられ、第2のラグ1864がケーブルのもう一方の端部に取り付けられる。エンドレス部材1862を形成するために端部及び/又はラグ1863、1864が互いに、例えば、溶接され、接着され、機械的に締結される間、ケーブルは張力下で伸張される。スピンドル1842は、近位プーリ1840を近位側に移動させるように、プーリ1840に係合するカムマウントを備え得る。エンドレス部材1862に張力をかけるために、ベルトテンショナ、ターンバックル構成などの他の形態の張力調整構成もまた用いられ得る。
The
依然として図22を参照すると、エンドレス部材1862は、カプラアセンブリ1830によって第1の遠位関節ドライバ1820の遠位端部1821に結合されている。カプラアセンブリ1830は、第1の遠位関節ドライバ1820の遠位端部1822上に形成された上部カプラ部分1832と、下部カプラ部分1834とを備えている。下部カプラ部分1834は、ラグ1862、1864を中に受容するように構成された2つのクレードル1835を伴って形成されている。一対の取付けピン1836が、上部カプラ部分1832のホール1837の中に押し付けられて2つのカプラ部分1832と1834を互いに固着するように構成されている。他の締結構成、ねじ、リベット、接着剤などが用いられてもよい。エンドレス部材1862がプーリ1840及び1340上で軸支されているとき、カプラアセンブリ1830は、第1の遠位関節ドライバ1820の軸方向移動に反応して、シャフトフレーム1812の遠位ノッチ1819内で軸方向に自在に移動する。第1の遠位関節ドライバ1820の軸方向移動によって発生される関節運動モーションは、第2の遠位関節ドライバ1860又はエンドレス部材1862に伝達される。取付けボール又はラグ1866がエンドレス部材1862に取り付けられ、遠位プーリ1340に形成された溝又はポケット1342内に受容される。したがって、エンドレス部材1862の移動は外科用エンドエフェクタ1300に、より具体的には外科用エンドエフェクタ1300の細長チャネル1302に伝達されて、関節運動軸線B−Bを中心としてエンドエフェクタを関節運動させる。したがって、第1の遠位関節ドライバ1820が遠位方向「DD」に移動されるとき、エンドレス部材1862は、矢印823によって表される関節運動方向に関節運動軸線B−Bを中心として外科用エンドエフェクタ1300を関節運動させる。図21を参照されたい。同様に、第1の遠位関節ドライバ1820が近位方向「PD」に移動されるとき、エンドレス部材1862は、矢印821によって表される関節運動方向に関節運動軸線B−Bを中心として外科用エンドエフェクタ1300を関節運動させる。図21及び25を参照されたい。図21に示すように、関節運動方向823は関節運動方向821とは反対である。
Still referring to FIG. 22, the
図26〜31は、以下で更に詳細に説明する様々な違いを除いて、上記で説明した細長シャフトアセンブリ200と類似した別の細長シャフトアセンブリ2200の一部分を示している。上記で詳細に説明した細長シャフトアセンブリ2200の構成要素は、簡潔にするために、同様の要素符号で参照されており、例えば、上記で説明した外科用器具10の各部分と共に用いられるとき、細長シャフトアセンブリ2200の動作を理解するのに必要となり得る範囲を越えてまで詳細には更に説明しないことにする。図26で分かるように、細長シャフトアセンブリ2200は、ノズル部分202及び203からなる近位ハウジング又はノズル201を含む。細長シャフトアセンブリ2200は、動作可能に取り付けられる外科用エンドエフェクタ2300のアンビル2310を閉鎖及び/又は開放するために利用され得る閉鎖管2260の形態をなすアンビルアクチュエータ部材を更に含む。図26で分かるように、細長シャフトアセンブリ2200は、関節ロック2350と動作可能にインターフェースするように構成された近位スパイン2210を含んでいる。近位スパイン2210は、1つめには、その中に発射部材2220を摺動可能に支持し、2つめには、近位スパイン2210の周りに延びる閉鎖管2260を摺動可能に支持するように構成される。近位スパイン2210はまた、近位関節ドライバ2230を摺動可能に支持する。近位関節ドライバ2230は、関節ロック2350に動作可能に係合するように構成された遠位端部2231を有する。
26-31 show a portion of another
図示の構成では、近位スパイン2210は、シャーシ240内に回転可能に支持される近位端部2211を備えている。1つの構成では、例えば、近位スパイン2210の近位端部2211には、シャーシ240内で支持されるように構成されたスパイン軸受にねじ込みによって取り付けられるように、ねじ山2214が形成される。かかる構成により、シャーシ240に対する近位スパイン2210の回転可能な取付けが容易になり、そのため、近位スパイン2210は、シャーシ240に対してシャフト軸線SA−SAを中心にして選択可能に回転され得る。閉鎖管2260の近位端部は、上記で詳細に説明したように、シャーシ内で支持される閉鎖シャトルに取り付けられる。細長シャフトアセンブリ2200が外科用器具10のハンドル又はハウジングに動作可能に結合されているとき、閉鎖トリガが動作することによって、閉鎖管2260が遠位側に前進する。
In the configuration shown, the
やはり上述したように、細長シャフトアセンブリ2200は、近位スパイン2210内で軸方向移動するように支持される発射部材2220を更に含む。発射部材2220は、遠位切断又は発射ビームアセンブリ2280に取り付けられるように構成された中間発射シャフト部分2222を含む。図27を参照されたい。中間発射シャフト部分2222は、その遠位端部に長手方向スロット2223を含んでもよく、長手方向スロット2223は、遠位発射ビームアセンブリ2280の近位端部上のタブを受容するように構成され得る。遠位発射ビームアセンブリ2280の長手方向スロット2223及び近位端部2280は、それら同士の相対的運動が可能となるように寸法を定められ、構成され得るものであり、またスリップ継手を備え得る。スリップ継手は、遠位発射ビームアセンブリ2280を移動させずに、又は少なくとも実質的に移動させずに、発射駆動部2220の中間発射シャフト部分2222を移動させて、エンドエフェクタ300を関節運動させることを可能にし得る。外科用エンドエフェクタ2300が好適に方向付けられると、遠位発射ビームアセンブリ2280を前進させ、エンドエフェクタ300内に支持され得るステープルカートリッジを発射するために、長手方向スロット2223の近位側壁がタブと接触するまで、中間発射シャフト部分2222は遠位側に前進され得る。近位スパイン2210はまた、遠位スパイン2212に結合される。
As also mentioned above, the
細長シャフトアセンブリ200と同様に、図示の細長シャフトアセンブリ2200は、近位関節ドライバ2230を発射部材2220に選択的にかつ解放可能に結合するように構成され得るクラッチアセンブリ2400を含む。一形態では、クラッチアセンブリ2400は、発射部材2220の周りに配置されたロックカラー又はスリーブ2402を含み、ロックスリーブ2402は、ロックスリーブ2402が近位関節ドライバ2230を発射部材2220に結合する係合位置と、近位関節ドライバ2230が発射部材2220に動作可能に結合されない係合解除位置との間で回転され得る。ロックスリーブ2402がその係合位置にあるとき、発射部材2220が遠位側に移動することによって、近位関節ドライバ2230を遠位側に移動させることができ、それに対応して、発射部材2220が近位側に移動することによって、近位関節ドライバ2230を近位側に移動させることができる。ロックスリーブ2402がその係合解除位置にあるとき、発射部材2220の移動は、近位関節ドライバ2230に伝達されず、結果として、発射部材2220は、近位関節ドライバ2230とは独立して移動することができる。様々な状況下で、近位関節ドライバ2230が発射部材2220によって近位又は遠位方向に移動されていないとき、近位関節ドライバ2230は関節ロック2350によって所定位置に保持され得る。
Similar to the
上記で説明したように、ロックスリーブ2402は、発射部材2220を受容するように構成された長手方向アパーチャ2403が中に画定された、円筒状の又は少なくとも実質的に円筒状の本体を備え得る。ロックスリーブ2402は、直径方向に対向する内向きのロック突出部2404と外向きのロック部材2406とを備え得る。ロック部材2404は、発射部材2220と選択的に係合されるように構成され得る。より具体的には、ロックスリーブ2402が係合位置にあるとき、ロック突出部2404は、発射部材2220に画定された駆動ノッチ2224内に配置され、そのため、遠位押力及び/又は近位引張力が発射部材2220からロックスリーブ2402に伝達され得るようになっている。ロックスリーブ2402がその係合位置にあるとき、第2のロック部材2406は、関節ドライバ2230に画定された駆動ノッチ2232内に受容され、それによって、ロックスリーブ2402に加えられる遠位押力及び/又は近位引張力が近位関節ドライバ2230に伝達され得る。実質的に、発射部材2220、ロックスリーブ2402、及び近位関節ドライバ2230は、ロックスリーブ2402がその係合位置にあるとき、互いに移動することになる。他方で、ロックスリーブ2402がその係合解除位置にあるとき、ロック突出部2404は、発射部材2220の駆動ノッチ2224内に配置され得ず、結果として、遠位押力及び/又は近位引張力が発射部材2220からロックスリーブ2402に伝達され得ないようになっている。それに応じて、遠位押力及び/又は近位引張力は近位関節ドライバ2230に伝達され得ない。そのような状況下で、発射部材2220は、ロックスリーブ2402及び近位関節ドライバ2230に対して近位側及び/又は遠位側に摺動され得る。
As described above, the
同様に上記で説明したように、細長シャフトアセンブリ2200は、閉鎖管2260上に回転可能に受容されるスイッチドラム2500を更に含む。スイッチドラム2500は、外向き突出作動ピン2410を中に受容するためのシャフトボス2504が形成された中空シャフトセグメント2502を備える。様々な状況において、作動ピン2410は、スロットを通って、ロックスリーブ2402に設けられた長手方向スロット内へと延在して、ロックスリーブ2402が関節ドライバ2230と係合されたときにその軸方向運動を容易にする。回転ねじりばね2420は、スイッチドラム2500上のボス2504、及びノズルハウジング203の一部分に係合して、付勢力をスイッチドラム2500に加えるように構成されている。スイッチドラム2500は、そこに画定された少なくとも部分的に円周方向の開口部2506を更に備えることができ、その開口部は、ノズル半部202、203から延在する円周方向のマウントを受容し、スイッチドラム2500と近位ノズル201との間の相対回転は許容するが並進は許容しないように構成され得る。上記で説明したように、スイッチドラム2500が回転すると、最終的に作動ピン2410及びロックスリーブ2402が、その係合位置と係合解除位置との間で回転することになる。したがって、本質的に、ノズル201は、上記で説明した様々な方式、並びに、米国特許出願第13/803,086号、現在の米国特許出願公開第2014/0263541号における様々な方式で、関節駆動システムと発射駆動システムとを動作可能に係合及び係合解除するために用いられ得る。
Similarly, as described above, the
図27を参照すると、閉鎖管アセンブリ2260は、二重枢動閉鎖スリーブアセンブリ2271を含んでいる。種々の形態によれば、二重枢動閉鎖スリーブアセンブリ2271は、上部及び下部遠位突出タングを有するエンドエフェクタ閉鎖スリーブ2272を含む。上部二重駆動リンク2277は、上向き突出遠位枢動ピン及び近位枢動ピンを含み、これら遠位枢動ピン及び近位枢動ピンはそれぞれ、閉鎖チューブ2260上で、上部近位突出タング内の上部遠位ピンホール、及び上部遠位突出タング内の上部近位ピンホールと係合する。下部二重枢動リンク2278は、上向き突出遠位枢動ピン及び近位枢動ピンを含み、これら遠位枢動ピン及び近位枢動ピンはそれぞれ、下部近位突出タングの下部遠位ピンホール、及び下部遠位突出タングの下部近位ピンホールと係合する。
With reference to FIG. 27, the
細長シャフトアセンブリ2200はまた、上記で説明した外科用エンドエフェクタ300と類似した外科用エンドエフェクタ2300を含む。図27で分かるように、外科用エンドエフェクタ2300は細長チャネル2302を含み、この細長チャネル2302は、外科用ステープルカートリッジ2304を中に動作可能に支持するように構成されている。細長チャネル2302は、2つの直立外側壁2322を含む近位端部分2320を有している。外科用エンドエフェクタ2300はアンビル2310を更に含み、そのアンビル2310は、ステープル成形下面2313をその上に形成されたアンビル本体2312を有している。アンビル本体2312の近位端部2314は、2つのアンビル取付けアーム2316を形成するように発射部材スロット2315によって分岐されている。各アンビル取付けアーム2316は、側方突出アンビルトラニオン2317を含む。アンビルトラニオン2317のうちの対応する1つを中に受容するためのトラニオンスロット2324が、細長チャネル2302の各外側壁2322に設けられている。そのような構成は、開放位置と閉鎖又はクランプ位置との間で選択的に枢動可能に移動するように、アンビル2310を細長チャネル2302に移動可能に固着するように働く。アンビル2310は、閉鎖管2260を、より具体的にはエンドエフェクタ閉鎖スリーブ2272をテーパ付き取付けアーム2316の上へと遠位側に前進させることによって閉鎖位置に移動され、それによってアンビル2310は、閉鎖位置へと枢動する間に遠位側に移動されることになる。エンドエフェクタ2300のアンビル2310上の直立タブ2318に係合するように構成された馬蹄形開口部2273が、エンドエフェクタ閉鎖スリーブ2272に設けられている。アンビル2310を開放するために、閉鎖管2260は、より具体的にはエンドエフェクタ閉鎖スリーブ2272は、近位方向に移動される。そのようにする際、馬蹄形開口部2273によって画定された中央タブ部分がアンビル2310上のタブ2318と共働して、アンビル2310を再び開放位置へと枢動させる。
The
図26、28及び29を参照すると、上述したように、細長シャフトアセンブリ2200は、上記で説明した関節ロック350及び810と実質的に同等である関節ロック2350を含んでいる。関節ロック350の構成要素とは異なるものであり、かつ関節ロック350の動作を理解するのに必要である関節ロック2350の構成要素について、以下で更に詳細に説明することにする。上記で説明したように、関節ロック2350は、定位置にエンドエフェクタ2300を選択的にロックするように構成及び操作され得る。かかる構成は、関節ロック2350がロック解除状態にあるときに、外科用エンドエフェクタ2300がシャフト閉鎖管2260に対して回転、すなわち関節運動することを可能にする。近位関節ドライバ2230がクラッチシステム2400を介して発射部材2220と作動的に係合されているとき、上記に加えて、発射部材2220は近位関節ドライバ2230を近位側及び/又は遠位側に移動させ得る。近位側か遠位側かに関わらず、近位関節ドライバ2230が移動することにより、上記で説明したように、関節ロック2350をロック解除することができる。この実施形態は、近位スパイン2210と遠位スパイン2212との間で移動可能に支持される近位ロックアダプタ部材2360を含む。近位ロックアダプタ2360は、近位フレーム2210と遠位フレーム2212との間に延びるフレームレール2368上で軸支される第1のロック要素2364と第2のロック要素2366とを中に受容するためのロック空洞2362を含む。関節ロック2350は、上記で説明した様々な方式で動作するものであり、簡潔のために本明細書ではそれ以上の説明はされない。
With reference to FIGS. 26, 28 and 29, as described above, the
図26、28及び29で分かるように、第1の遠位関節ドライバ2370が近位ロックアダプタ2360に取り付けられている。第1の遠位関節ドライバ2370は、エンドエフェクタ2300の細長チャネル2302と動作可能にインターフェースする第2の遠位関節ドライバ2380に動作可能に取り付けられている。第2の遠位関節ドライバ2380は、近位プーリ2383及び遠位プーリ2392上で回転可能に軸支されるケーブル2382を備えている。遠位プーリ2392は、エンドエフェクタ装着アセンブリ2390上に回転不能に支持されるか又は一体的に形成され、デテント又はポケット2396を含む。図示の例では、エンドエフェクタ装着アセンブリ2390は、エンドエフェクタ装着アセンブリ2390のホール及び細長チャネル2302の近位端部2320のホール2394を通じて延びるスプリングピン2393によって、細長チャネル2302の近位端部2320に移動不能に取り付けられている。近位プーリ2383は、遠位スパイン2212上に回転可能に支持されている。遠位スパイン2212の遠位端部は枢動ピン2213をその上に形成されており、枢動ピン2213は、エンドエフェクタ装着アセンブリ2390に形成された枢動ホール2395内に回転可能に受容されるように構成されている。そのような構成により、枢動ホール2395及びピン2213によって規定される関節運動軸線B−Bを中心とした、遠位スパイン2212に対する細長チャネル2302の枢動移動(すなわち関節運動)が促進される。
As can be seen in FIGS. 26, 28 and 29, a first distal
一形態では、ケーブル2382は、例えば、ステンレス鋼、タングステン、アルミニウム、チタンなどから製作され得る。ケーブルは、所望のレベルの引張強度及び可撓性を得るために、様々な本数の撚線を有する網組又は多重撚線構造をなしてよい。様々な構成において、例えば、ケーブル2382は、0.08センチメートル〜0.20センチメートル(0.03インチ〜0.08インチ)の範囲、より好ましくは0.13センチメートル〜0.20センチメートル(0.05インチ〜0.08インチ)の範囲の直径を有し得る。好ましいケーブルは、例えば、半硬質から完全硬質の300系ステンレス鋼から製作され得る。様々な構成において、ケーブルはまた、例えば、潤滑性を改善するため及び/又は伸張を低減するために、例えば、テフロン(登録商標)、銅などでコーティングされ得る。図示の例では、ケーブル2382は、例えばクリンプによってその一方の端部に取り付けられたラグ2384と、もう一方の端部に取り付けられたラグ2385とを有している。第1の遠位関節ドライバ2370は、一対の離間したクリート2372、2374を含み、それらのクリート2372、2374は、それらの間にラグ2384、2385を収容するように互いに十分に離間されている。例えば、近位のクリート2372は、ケーブル2382のうちのラグ2384に隣接する部分を受容するための近位のスロット2373を含み、遠位のクリート2374は、ケーブル2382のうちのラグ2385に隣接する対応部分を受容するための遠位のスロット2375を含む。スロット2373及び2375はそれぞれ、それらをラグ2384、2385が通り抜けるのを防止するように、ラグ2384、2385に対して寸法決めされている。近位のスロット2375は、その中にケーブル2382のうちの対応する部分をしっかりと把持するように、遠位のスロット2375と比較して、ある角度をなして方向付けられている。図30を参照されたい。取付けボール又はラグ2398がエンドレス部材2382に取り付けられ、遠位プーリ2392に形成されたデテント又はポケット2396内に受容される。図31を参照されたい。したがって、第1の遠位関節ドライバ2370が、上記で説明した方式で、近位方向「PD」に軸方向に後退されるとき、エンドレス部材2382は、図31に矢印2376によって表される方向にエンドエフェクタ2300を関節運動させることになる。逆に、第1の遠位関節ドライバ2370が、遠位方向「DD」に軸方向に後退されるとき、外科用エンドエフェクタ2300は、図31に矢印2399によって表される方向に関節運動される。加えて、近位及び遠位のクリート2372、2374は、それらの間にラグ2384、2385を収容するように十分に離間されている。十分な張力をケーブル2382に加えるために、張力調整ウェッジ2378が図29〜32に示すように使用され、そのため、ケーブルが作動されると、関節運動モーションをエンドエフェクタ2300に加えるようになっている。図35に示す代替的な構成では、近位のクリート2374’は初期には、第1の関節ドライバ2370に取り付けられない。近位のクリート2374’は、ラグ2384及び2385を遠位のクリート2372と近位のクリート2374’との間に捕捉するように、第1の遠位関節ドライバ2370上に配置されている。近位のクリート2374’は、十分な大きさの張力がケーブル2382に発生されるまで、遠位のクリート2372に向かって移動され、次いで近位のクリート2374’は第1の遠位関節ドライバ2370に取り付けられる。例えば、近位のクリート2374’は、レーザ溶接又は他の好適な形態の取付け手段若しくは締結具構成によって、第1の遠位関節ドライバ2370に取り付けられ得る。
In one form, the
図36〜39を参照すると、外科用器具は、例えば、中央発射ビーム支持部材2286を含み、この中央発射ビーム支持部材2286は、関節継手全体にわたって延びて可撓性発射ビームアセンブリ2280を支持するように構成されている。一形態では、中央発射ビーム支持部材2286は、可撓性プレート部材又はバンドを備え、外科用エンドエフェクタに取り付けられる下向き突出遠位取り付けタブ2287と、細長シャフトアセンブリに取り付けられる上向き延出近位端部分2288とを含む。少なくとも1つの構成では、遠位取付けタブ2287は、スプリングピン2393によってエンドエフェクタ装着アセンブリ2390に取り付けられ、近位端部分2288はピン(図示せず)によって遠位スパイン2212にピン留めされる。中央発射ビーム支持部材2286は、デバイスの中心線又はシャフト軸線に沿って配置され、関節運動の間に発射ビームを支持するように働く。これは、発射ビームの外側部に配置され、それによってシャフト軸線から偏位して、関節運動の間に受ける張力及び圧縮力を増加させる、「吹出し(blow-out)」プレート又は側方支持プレートを用いる構成とは異なるものである。図示の例では、長手方向可動可撓性発射ビームアセンブリ2280は、少なくとも2つのビーム層を含む積層ビーム構造を備え、少なくとも1つのビーム層は、中央発射ビーム支持部材の隣接する一方の外側部を通過するように構成され、少なくとも1つの他のビーム部材は、中央発射ビーム支持部材の隣接する別の外側部を通過するように構成される。図示の例では、2つの積層2282及び2284が、可撓性張力伝達部材の各側部の近くを通過するように構成されている。例えば、図35及び36を参照されたい。様々な実施形態において、積層2282及び2284は、例えば、それらの近位端部において互いに溶接又はピン留めすることによって相互連結される、例えばステンレス鋼バンドを備え得るが、それらの対応する遠位端部は、エンドエフェクタが関節運動されるときに積層体又はバンドを互いに対して分離させるように、互いに連結されない。各対の積層又はバンド2282、2284は、発射ビームアセンブリ2280の側方発射バンドアセンブリ2285として表されている。したがって、図36に示すように、一方の側方発射バンドアセンブリ2285は、一連の側方荷重支持部材2290によって中央関節バー2286に対して軸方向に移動するように、中央関節バー2286の各外側部上で支持される。各側方荷重支持部材2290は、例えば、ステンレス鋼、アルミニウム、チタン、液晶ポリマー材料、プラスチック材料、ナイロン、アクリロニトリルブタジエンスチレン(ABS)、ポリエチレンなどから製作され、両側の弓形端部2292を伴って形成され得る。各側方荷重支持部材2290はまた、それを通じて延びて側方発射バンドアセンブリ2285と中央関節バー2286とのアセンブリを受容する軸方向通路2294を有している。図38から最も顕著に分かるように、各軸方向通路は、長手方向可動可撓性発射ビームアセンブリ2280上における側方荷重支持部材290の移動を促進する、2つの対向する弓形表面2295によって画定されている。側方荷重支持部材2290は、側方発射バンドアセンブリ2285及び中央関節バー2286上に連続的に配列されており、そのため、対向する弓形端部2292は、隣接する側方荷重支持部材2290の対応する弓形端部2292と当接するようになっている。例えば、図36及び37を参照されたい。
With reference to FIGS. 36-39, the surgical instrument comprises, for example, a centrally launched
再び図37を参照すると、中央関節バー2286の近位端部分2288が、遠位スパイン2212への取付けのために下向きに延びていることが分かる。発射ビームアセンブリ2280の遠位端部2287は、例えば上記で説明したタイプ及び構造の発射部材2900に取り付けられる。この図で分かるように、発射部材2900は、垂直に延出する発射部材本体2902を含み、その発射部材本体902は組織切断面又はブレード2904をその上に有している。加えて、発射部材2900との駆動接触のため、ウェッジスレッド2910が外科用ステープルカートリッジ2304内に装着されていてよい。発射部材2900がカートリッジ本体2304を通じて遠位側に駆動されると、ウェッジスレッド2910のウェッジ面2912がステープルドライバに接触して、ドライバ、及びその上に支持された外科用ステープルをカートリッジ2304内で上向きに作動させる。発射ビームアセンブリ2280は、上記で説明した様々な方式で操作される。発射ビームアセンブリ2280が関節継手の周りで遠位側に前進されるとき、側方荷重支持部材2290は、発射ビームアセンブリ2280にかかる座屈荷重に抗するのに役立ち得る。側方荷重支持部材2290はまた、エンドエフェクタを関節運動させるのに必要となる力の大きさを低減し得ると共に、他の関節継手構成と比較してより大きな関節運動角度に適応し得る。固定された中央発射ビーム支持部材2286は、関節運動及び発射の間に発生された引張荷重を支持するように働く。
Referencing FIG. 37 again, it can be seen that the
上記で説明したように、発射ビームアセンブリは、少なくとも2つのビーム層を含む積層ビーム構造を備える。発射ビームアセンブリが遠位側に前進されるとき(発射の間)、発射ビームアセンブリは、中央発射ビーム支持部材によって本質的に分岐され、そのため、発射ビームアセンブリ(すなわち積層)の各部分は中央発射ビーム支持部材の両側を通過するようになる。 As described above, the firing beam assembly comprises a stacked beam structure that includes at least two beam layers. When the firing beam assembly is advanced distally (during firing), the firing beam assembly is essentially branched by a central firing beam support member, so that each part of the firing beam assembly (ie, stacking) is centrally fired. It will pass on both sides of the beam support member.
図40〜43は、別の発射ビームアセンブリ2280’のうちの発射部材2900に取り付けられる部分を示している。この図で分かるように、発射ビームアセンブリ2280は、「a」で示される厚さをそれぞれが有する2つの外側ビーム又は層2282’と、「b」で示される厚さをそれぞれが有する4つの中央層2284’とを含む積層構造を備えている。少なくとも1つの構成において、例えば、「a」は約0.013センチメートル〜0.020センチメートル(0.005インチ〜0.008インチ)、より好ましくは0.020センチメートル(0.008インチ)であってよく、「b」は約0.020センチメートル〜0.030センチメートル(0.008インチ〜0.012インチ)、より好ましくは0.025センチメートル(0.010インチ)であってよい。しかしながら、他の厚さが用いられてもよい。図示の例では、「a」は「b」よりも薄い。他の例では、「a」は「b」よりも厚い。代替的な構成では、例えば、積層体は3つの異なる厚さ「a」、「b」、「c」から構成され得るが、ここで、「a」=0.015センチメートル(0.006インチ)、「b」=0.020センチメートル(0.008インチ)、「c」=0.025センチメートル(0.010インチ)である(最も厚い積層体又はバンドはアセンブリの中央にある)。様々な構成において、偶数の積層体又はバンドが存在してもよく、ここで「c」は中央にある単一の最も厚い積層体である。
40-43 show the portion of another firing beam assembly 2280'attached to the firing
厚さ及び曲げの中心線からの距離に基づいてビームアセンブリに加えられるひずみの大きさにより、この積層体組成は適切である。中心線により近い、より厚い積層体又はバンドは、中心線から離れた、より薄い積層体又はバンドと同じレベルのひずみを受け得るが、これは、より薄い積層体又はバンドが、それらが互いに重ね合わされている事実を鑑みると、より大きく屈曲しなければならないためである。曲率半径は、中心線から離れた曲線の内側でより急になる。曲率半径が同じであるとすると、より厚い積層体又はバンドは、より薄い積層体と比べて、より大きな内部応力を受ける傾向がある。したがって、最小の曲率半径を有するより薄い側部の積層体又はバンドは、中心線に近いより厚い積層体又はバンドと同じ、可塑的に変形する可能性を有し得る。換言すれば、エンドエフェクタがある方向に関節運動するとき、その関節運動の方向から離れたところに位置する積層体又はバンドは最大の曲げ半径を有し、関節運動の方向に最も近い積層体又はバンドは最も密な曲げ半径を有する。しかしながら、エンドエフェクタがその反対の方向に関節運動されるとき、その逆が真となる。積層スタックの内側にある積層体は、同じ偏位を受けるが、それらの曲げ半径は常に外側の曲げ半径の範囲内にある。したがって、可撓性を維持するために、より薄い積層体をスタックの外側に配置することが望ましくなり得る。しかしながら、剛性及び座屈抵抗を最大にするために、より厚い材料が内側にあることで、付加的な利点が加わる。それに代わって、エンドエフェクタが単一の方向にのみ関節運動する必要がある場合、その関節運動の方向から離れたところに位置する積層体又はバンドは最大の曲げ半径を受け、関節運動の方向に位置する積層体又はバンドは最も密な曲げ半径を有することになる。しかしながら、エンドエフェクタは反対方向には関節運動しないため、その逆はもはや当てはまらず、したがって、積層スタックは対称的である必要はない。したがって、そのような構成では、最も薄い積層体又はバンドは、最も急な曲げ半径を受けるもの(関節運動の方向の側にある積層体又はバンド)であることが望ましくなる。 This laminate composition is appropriate due to the magnitude of the strain applied to the beam assembly based on the thickness and distance from the bending centerline. Thicker laminates or bands closer to the centerline can receive the same level of strain as thinner laminates or bands away from the centerline, but this is because the thinner laminates or bands overlap each other. This is because, in view of the fact that it has been done, it must be bent more. The radius of curvature becomes steeper inside the curve away from the centerline. Given the same radius of curvature, thicker laminates or bands tend to be subject to greater internal stresses than thinner laminates. Therefore, a thinner side laminate or band with the smallest radius of curvature may have the same plastic deformation potential as a thicker laminate or band near the centerline. In other words, when the end effector makes a joint movement in a certain direction, the laminate or band located away from the direction of the joint movement has the maximum bending radius and is the laminate closest to the direction of the joint movement. The band has the densest bend radius. However, the opposite is true when the end effector is articulated in the opposite direction. Laminates inside the stack stack undergo the same deviation, but their bend radii are always within the outer bend radii. Therefore, it may be desirable to place a thinner laminate outside the stack to maintain flexibility. However, the thicker material inside to maximize stiffness and buckling resistance adds an additional advantage. Instead, if the end effector needs to joint in only one direction, the laminate or band located away from that direction of joint will receive the maximum bend radius and in the direction of joint movement. The laminated body or band located will have the densest bend radius. However, since the end effectors do not joint in the opposite direction, the reverse is no longer true and therefore the stacking stack does not have to be symmetrical. Therefore, in such a configuration, it is desirable that the thinnest laminate or band be the one that receives the steepest bend radius (the laminate or band on the side in the direction of joint movement).
依然として他の構成では、積層体又はバンドは、種々の強度及び弾性率を有する種々の金属から製作されてよい。例えば、外側の積層体又はバンドは、内側の積層体又はバンドと同じ厚さを有し得、内側の積層体又はバンドは300系ステンレス鋼から製作され、外側の積層体又はバンドはチタン又はニチノールから製作される。 Still in other configurations, the laminate or band may be made of different metals with different strengths and moduluss. For example, the outer laminate or band can have the same thickness as the inner laminate or band, the inner laminate or band is made of 300 series stainless steel, and the outer laminate or band is titanium or nitinol. Made from.
図42及び43からも分かるように、遠位発射ビームアセンブリ2280’は、上記で説明した一連の側方荷重支持部材2290と共に効果的に用いられ得る。遠位発射ビームアセンブリ2280はまた、上記で説明した方式で中央関節バー2286と共に使用され得、そのため、層又は側方ビーム(又はバンド若しくは積層体)のいくつかは中央関節バーの側部に沿って軸方向に前進することが明らかとなろう。いくつかの実施形態では、中央関節バー2286の各側部上で前進する層は、同じ厚さ、組成、形状及び構成を有し得る。他の構成では、発射の間の座屈を回避するために所望量の大きさの剛性を維持する一方で、所望の移動範囲及び可撓性を達成するように、中央関節バーの一方の側に沿って進行する層が、中央関節バーのもう一方の側に沿って進行する層の厚さ及び/又は組成及び/又は形状とは異なる厚さ及び/又は組成及び/又は形状を有してもよい。
As can be seen from FIGS. 42 and 43, the distal firing beam assembly 2280'can be effectively used with the series of lateral
図44〜46は、上記で説明したタイプ及び構造の外科用エンドエフェクタ300を含む別の細長シャフトアセンブリ3200の一部分を示している。他の形態の外科用エンドエフェクタも用いられ得る。細長シャフトアセンブリ3200はまた、発射部材900に取り付けられる、長手方向可動可撓性発射ビームアセンブリ3280を含んでいる。代替的な構成では、発射ビームアセンブリ3280の遠位端部は、それに取り付けられる発射部材を必要とせずに、外科用エンドエフェクタ内で様々な動作を実施するように構成され得る。可撓性発射ビームアセンブリ3280は、本明細書で説明した様々なタイプの積層ビーム構成を備え得る。一構成では、可撓性発射ビームアセンブリ3280が関節継手を横断するときに、その可撓性発射ビームアセンブリ8280を横方向に支持するために、少なくとも2つの圧迫バンドが用いられる。図示の実施形態は、可撓性発射ビームが関節継手を横断するときに、その可撓性発射ビームを横方向に支持するために、合計で4つの圧迫バンドを用いている。例えば、細長シャフトアセンブリ3200は、遠位端部3217を含むスパイン3210を更に含み、遠位端部3217は、2つの遠位空洞又はノッチ3219と、2つの近位空洞又はノッチ3219’とを中に形成されている。一方の遠位空洞3219は、上記可撓性発射ビームアセンブリ3280の一方の外側部3281上に位置する第1の圧迫バンド3900の第1の近位端部3904を収容し、もう一方の遠位空洞3219は、可撓性発射ビームアセンブリ3280の別の外側部3283上に位置する第2の圧迫バンド3901の第2の近位端部3905を収容する。第1の圧迫バンド3900は第1の遠位端部3902を含み、この第1の遠位端部3902は、外科用エンドエフェクタ300の細長チャネル302の近位端部320上に形成された対応する直立側方支持壁330内に装着されている。同様に、第2の圧迫バンド3901は第2の遠位端部3907を含み、この第2の遠位端部3907はまた、外科用エンドエフェクタ300の細長チャネル302の近位端部320上に形成された対応する直立側方支持壁330内に装着されている。第1及び第2の遠位圧迫バンド3900、3901はばね鋼などから製作されてもよく、近位端部3904、3905は、図示のように遠位ノッチ3219内に移動可能に受容されるように構成された付勢部分を形成するように、U字形状をなす形式で折り曲げられてもよい。そのような構成により、第1及び第2の遠位圧迫バンド3900、3901は、近位端部3904、3905をそれらの対応する遠位ノッチ3219内に保持する一方で、外科用エンドエフェクタ300の関節運動に反応して屈曲することが可能となる。
Figures 44-46 show a portion of another
図44〜46から分かるように、細長シャフトアセンブリ3200は、第3の圧迫バンド3910と第4の圧迫バンド3911とを更に含んでいる。第1及び第2の圧迫バンド3900、3901と同様に、第3及び第4の圧迫バンド3910、3911はばね鋼から製作されてもよい。図44〜46で分かるように、第3の圧迫バンド3910は、可撓性発射ビームアセンブリ3280の第1の圧迫バンド3900と外側部3281との間に配されてもよく、第4の圧迫バンド3911は、可撓性発射ビームアセンブリ3280の第2の圧迫バンド3901と別の外側部3283との間に配されてもよい。第3の圧迫バンド3910の第3の近位端部3914並びに第4の圧迫バンド3911の第4の近位端部3915はそれぞれ、スパイン3210内の対応する近位空洞3219’内に移動可能に受容される付勢部分を形成するように、U字形状をなす方式で折り曲げられてもよい。第3の圧迫バンド3910の第3の遠位端部3912及び第4の圧迫バンド3911の第4の遠位端部3917は、外科用エンドエフェクタ300の対応する側方支持壁330内に装着されている。
As can be seen from FIGS. 44-46, the
細長シャフトアセンブリ3200は、エンドエフェクタ300が関節運動軸線を中心として関節運動されるときに、可撓性発射ビームアセンブリ3280を更に横方向に支持するための可動支持リンクアセンブリ3920を更に備えている。図44〜46で分かるように、可動支持リンクアセンブリ3920は、外科用エンドエフェクタ300並びに細長シャフトアセンブリ3200に移動可能に結合される中央支持部材3922を備えている。一実施形態では、中央支持部材3922は、細長チャネル302の近位端部320に枢動的にピン留めされる。中央支持部材3922は近位突出タブ3926を更に含み、この近位突出タブ3926は細長近位スロット3928を有している。この近位スロット3928は、スパイン3210上に形成された中央支持ピン3211を摺動可能に受容するように構成されている。そのような構成により、発射ビームアセンブリ3280上における適切な側方支持を維持するように動的に移動することが可能である一方で、より広範囲の関節運動に適応するように、中央支持部材3922と細長シャフトアセンブリ3200のスパイン3210との間の相対的な枢動及び軸方向移動が可能となる。図44〜46で分かるように、中央支持部材3922は、それを通じて発射ビームアセンブリ3280を軸方向に受容するための中央配設スロット3930を更に含んでいる。
The
更に図44〜46で分かるように、可動支持リンクアセンブリ3920は、細長可動枢動リンク3940を更に備えている。枢動リンク3940は、近位突出近位ノーズ部分3943と遠位突出遠位ノーズ部分3944とを有する細長近位本体3942を含んでいる。枢動リンク3940は、第1の下向き突出側方支持壁3945と第2の下向き突出側方支持壁3946とを更に含み、ビームスロット3947をそれらの間に画定する。図46で分かるように、発射ビームアセンブリ3280は、発射ビームアセンブリ3280の作動及び外科用エンドエフェクタ300の関節運動の間に第1の側方支持壁3945と第2の側方支持壁3946との間に延びるように構成されている。更に、図示の構成では、例えば、第1の圧迫バンド3900は第1の側方支持壁3945と第3の圧迫バンド3910との間に延び、第2の圧迫バンド3901は第2の側方支持壁3946と第4の圧迫バンド3911との間に延びている。第1の側方支持壁3945は、内向きの第1の弓形表面3948を含み、第2の側方支持壁3946は内向きの第2の弓形表面3949を含む。第1及び第2の弓形表面3948、3949は、発射ビームアセンブリ3280がエンドエフェクタ300の関節運動の間に屈曲するときに、発射ビームアセンブリ3280に側方支持をもたらすように働く。これらの丸みの付いた表面は、関節運動の方向及び程度に応じて、発射ビームアセンブリ3280及び圧迫バンド3900、3901、3910、3911の外径に適合し得る。同様に図44及び45で分かるように、スパイン3210の遠位端部3217は、一対の左右の対向するシャフトノッチ3218を含み、それらのシャフトノッチ3218の中に、外科用エンドエフェクタが関節運動軸線を中心として関節運動される方向に応じて、枢動リンク3940の丸形近位突出近位ノーズ部分3943が延びる。同様に、エンドエフェクタが関節運動される方向に応じて、枢動リンク3940の遠位突出遠位ノーズ部分3944を収容するために、左右の対向する支持ノッチ3932が中央支持体3922に設けられている。そのようなノッチ構成は、枢動リンク3940に側方支持を与えると同時に関節運動の方向に適応するのに適した方向に枢動リンク3940を適切に位置合わせするように働く。
Further, as can be seen in FIGS. 44-46, the movable
図47〜51は、以下で更に詳細に説明する様々な違いを除いて、いくつかの態様において上記で説明した細長シャフトアセンブリ2200と類似した別の細長シャフトアセンブリ4200を示している。上記で詳細に説明した細長シャフトアセンブリ2200の構成要素は、簡潔にするために、同様の要素符号を有することになり、例えば、上記で説明した外科用器具10の各部分と共に用いられるとき、細長シャフトアセンブリ4200の動作を理解するのに必要となり得る範囲を越えてまで詳細には更に説明しないことにする。図47で分かるように、少なくとも1つの例において、細長シャフトアセンブリ4200は関節ロック2350を含む。上記で詳細に説明したように、関節ロックアセンブリ2350は、第1の遠位関節ドライバ4370に結合される(例えばピン留めされる)近位ロックアダプタ2360を含む。図47及び50で分かるように、第1の遠位関節ドライバ4370は、第1の近位ギヤラックセグメント4371と、その遠位端部4372上に形成された第1の遠位ギヤラックセグメント4373とを含んでいる。細長シャフトアセンブリ4200はまた第2の遠位関節ドライバ4380を含み、この第2の遠位関節ドライバ4380は、第2の近位ギヤラックセグメント4381と、その遠位端部4382上に形成された第2の遠位ギヤラックセグメント4383とを含む。
FIGS. 47-51 show another
第1の遠位関節ドライバ4370及び第2の遠位関節ドライバ4380は、遠位スパインアセンブリ4212に対して近位方向「PD」及び遠位方向「DD」に軸方向に移動するように構成されている。図50で分かるように、第1の近位ギヤラックセグメント4371及び第2の近位ギヤラックセグメント4381は、遠位スパインアセンブリ4212によって回転可能に支持されている近位動力分配ギヤ4390との噛合い係合をなしている。同様に、第1の遠位ギヤラックセグメント4373及び第2の遠位ギヤラックセグメント4383は、遠位動力分配ギヤアセンブリ4392との噛合い係合をなしている。具体的に言えば、少なくとも1つの構成において、遠位動力分配ギヤアセンブリ4392は、第1の遠位ギヤラックセグメント4373及び第2の遠位ギヤラックセグメント4383との噛合い係合をなすピニオンギヤ4393を含む。遠位動力分配ギヤアセンブリ4392は、アイドラギヤ4395との噛合い係合をなして構成された駆動ギヤ4394を更に含む。次にアイドラギヤ4395は、外科用エンドエフェクタ4300の細長チャネル4302の近位端部分4320上に形成された被動ギヤ4306との噛合い係合をなして支持される。外科用エンドエフェクタ4300は、その他の点では外科用エンドエフェクタ2300と類似しており、上記で説明した様々な方式で開閉され得るアンビル4310を含み得る。図48、49及び51を参照すると、遠位スパインアセンブリ4212は、上部スパイン部分4212Aと下部スパイン部分4212Bとを備え得る。細長チャネル4302の遠位動力分配ギヤアセンブリ4392、アイドラギヤ4395及び被動ギヤ部分4306はそれぞれ、遠位スパインアセンブリ4212の底面部分4212Bに枢動的に取り付けられるか又はその底面部分4212B上で支持される。
The first distal
図47に示す細長シャフトアセンブリ4200は、発射部材(図示せず)に取り付けられる発射ビームアセンブリ3280を含んでいる。発射ビームアセンブリ3280は、本明細書で説明したタイプの積層ビーム構成を備え得る。発射部材の動作については、上記で詳細に説明されており、簡潔にするため繰り返さないことにする。図47で分かるように、そのすべての開示内容が参照によって本明細書に組み込まれる米国特許出願第14/575,117号、発明の名称「SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS」において開示されているタイプの発射ビーム支持部材4400が、外科用エンドエフェクタ4300の関節運動の間に発射ビームアセンブリ3280を支持するために用いられている。図52は、細長シャフトアセンブリ4200における遠位発射ビームアセンブリ2280の使用法を示している。この図で分かるように、外科用エンドエフェクタ4300が関節運動されるときに遠位発射ビームアセンブリ2280を支持するために、複数の側方荷重支持部材2290が上記で説明した方式で用いられている。
The
図53〜58は、以下で更に詳細に説明する様々な違いを除いて、いくつかの態様において上記で説明した細長シャフトアセンブリ2200と類似した別の細長シャフトアセンブリ5200を示している。細長シャフトアセンブリ2200に関連して上記で詳細に説明した細長シャフトアセンブリ5200の構成要素は、簡潔にするために、同様の要素符号で識別され、例えば、上記で説明した外科用器具10の各部分と共に用いられるとき、細長シャフトアセンブリ5200の動作を理解するのに必要となり得る範囲を越えてまで詳細には更に説明しないことにする。
FIGS. 53-58 show another
細長シャフトアセンブリ2200と同様に、図示の細長シャフトアセンブリ5200はクラッチアセンブリ2400を含み、そのクラッチアセンブリ2400は、細長シャフトアセンブリ5200に動作可能に結合された外科用エンドエフェクタ300に押込み及び引張りの関節運動モーションを加えるように構成された関節運動システム5600と動作可能に係合するように構成されている。この実施形態では、クラッチアセンブリ2400は、発射部材2220の周りに配置されたロックカラー又はロックスリーブ2402を含み、ロックスリーブ2402は、ロックスリーブ2402が関節運動システム5600を発射部材2220に結合する係合位置と、関節運動システム5600が発射部材2220に動作可能に結合されない係合解除位置との間で回転され得る。特に図54〜56を参照すると、図示の例では、関節運動システム5600は、ノズル201内で回転移動するように支持される関節ディスク又は回転部材5602を備えている。関節ディスク5602は、駆動連結アセンブリ5610によって回転可能に駆動される。図示の例では、駆動連結アセンブリ5610は、関節ディスク5602に取り付けられた駆動ピン5621を含んでいる。関節駆動リンク5614が、駆動ピン5612に対する関節駆動リンク5614の移動を促進するコネクタ5616によって、駆動ピン5612に動作可能に取り付けられている。図54〜56を参照されたい。関節駆動リンク5614は駆動カプラ5618を含み、この駆動カプラ5618は、ロックスリーブ2402上の外向きロック部材2406と駆動的に係合するように構成されている。図53を参照されたい。
Similar to the
上記で説明したように、ロックスリーブ2402は、発射部材2220を受容するように構成された長手方向アパーチャ2403が中に画定された、円筒状の又は少なくとも実質的に円筒状の本体を備え得る。図53を参照されたい。ロックスリーブ2402は、直径方向に対向する内向きのロック突出部2404と、外向きのロック部材2406とを備え得る。ロック部材2404は、発射部材2220と選択的に係合されるように構成され得る。より具体的には、ロックスリーブ2402が係合位置にあるとき、ロック突出部2404は、発射部材2220に画定された駆動ノッチ2224内に配置され、そのため、遠位押力及び/又は近位引張力が発射部材2220からロックスリーブ2402に伝達され得るようになっている。ロックスリーブ2402がその係合位置にあるとき、外向きロック部材2406は、図53に示すように駆動カプラ5618の駆動ノッチ5619内に受容され、そのため、ロックスリーブ2402に加えられる遠位押力及び/又は近位引張力が関節駆動リンク5614に伝達され得る。実質的に、発射部材2220、ロックスリーブ2402、及び関節駆動リンク5614は、ロックスリーブ2402がその係合位置にあるとき、互いに移動することになる。他方で、ロックスリーブ2402がその係合解除位置にあるとき、ロック突出部2404は、発射部材2220の駆動ノッチ2224内に配置され得ず、結果として、遠位押力及び/又は近位引張力が発射部材2220からロックスリーブ2402に伝達され得ないようになっている。同様に、駆動力「DF」は関節ディスク5602には加えられ得ない。そのような状況下で、発射部材2220は、ロックスリーブ2402及び近位関節ドライバ2230に対して近位側及び/又は遠位側に摺動され得る。
As described above, the
同様に上記で説明したように、細長シャフトアセンブリ5200は、閉鎖管2260上に回転可能に受容されるスイッチドラム2500を更に含む。図53を参照されたい。スイッチドラム2500は、外向き突出作動ピン2410を中に受容するためのシャフトボス2504が形成された中空シャフトセグメント2502を備える。様々な状況において、作動ピン2410は、ロックスリーブ2402に設けられた長手方向スロット2401内へと延在して、ロックスリーブ2402が関節駆動リンク5614と係合されているときにロックスリーブ2402の軸方向運動を促進する。回転ねじりばね2420は、スイッチドラム2500上のボス2504及びノズルハウジング201の一部分に係合して、付勢力をスイッチドラム2500に加えるように構成されている。同様に上記で説明したように、スイッチドラム2500は、そこに画定された少なくとも部分的に円周方向に沿った開口部を更に備えることができ、その開口部は、ノズル半部から延在する円周方向マウントを受容し、スイッチドラム2500とノズルハウジング201との間の相対回転は許容するが並進は許容しないように構成され得る。上記で説明したように、スイッチドラム2500が回転すると、最終的に作動ピン2410及びロックスリーブ2402が、その係合位置と係合解除位置との間で回転することになる。したがって、本質的に、ノズルハウジング201は上記で説明した様々な方式、並びに、米国特許出願第13/803,086号、現在の米国特許出願公開第2014/0263541号における様々な方式で、関節運動システム5600と発射駆動システムとを動作可能に係合及び係合解除するために用いられ得る。
Similarly, as described above, the
再び図53〜56を参照すると、図示の例の関節運動システム5600は、「第1の」又は右の関節リンケージ5620と、「第2の」又は左の関節リンケージ5640とを更に含んでいる。第1の関節リンケージ5620は第1の関節リンク5622を含み、第1の関節リンク5622は、関節ディスク5602の第1の関節スロット5604内に移動可能に受容される第1の関節ピン5624を含む。第1の関節リンク5622は、関節ロック2350と係合するように構成された第1の関節コネクタ5626に移動可能にピン留めされている。上記で説明したように、関節ロック2350は、定位置に外科用エンドエフェクタ300を選択的にロックするように構成及び操作され得る。かかる構成は、関節ロック2350がそのロック解除状態にあるときに、外科用エンドエフェクタ300がシャフト閉鎖管2260に対して回転、すなわち関節運動することを可能にする。関節駆動リンク5614がクラッチシステム2400を介して発射部材2220と動作可能に係合されているとき、上記に加えて、発射部材2220は関節ディスク6502を回転させて第1の関節リンケージ5620を近位側及び/又は遠位側に移動させ得る。近位側か遠位側かに関わらず、第1の関節リンケージ5620の第1の関節コネクタ5626が移動することにより、上記で説明したように、関節ロック2350をロック解除することができる。近位ロックアダプタ2360は、近位フレーム2210と遠位フレームとの間に延びるフレームレール上で軸支される第1のロック要素2364と第2のロック要素2366とを中に受容するためのロック空洞2362を含む。関節ロック2350の動作は、上記で説明した様々な方式で動作するものであり、簡潔のために本明細書ではそれ以上の説明はされない。図53で分かるように、第1の遠位関節ドライバ5370が近位ロックアダプタ2360に取り付けられている。第1の遠位関節ドライバ5370は、外科用エンドエフェクタ300の細長チャネル302の近位端部320に動作可能に取り付けられている。
Referring again to FIGS. 53-56, the articulated
同様に上に示したように、図示の例の関節運動システム5600は、「第2の」又は左の関節リンケージ5640を更に含んでいる。図54〜56で分かるように、第2の関節リンケージ5640は第2の関節リンク5642を含み、第2の関節リンク5642は、関節ディスク5602の第2の関節スロット5606内に移動可能に受容される第2の関節ピン5644を含んでいる。第2の関節リンク5642は、外科用エンドエフェクタ300の細長チャネル302の近位端部320に取り付けられる第2の関節バー5646にピン留めされている。図54を参照すると、関節運動システム5600は、第1の関節スロット5604内に受容される第1の関節付勢部材5628と、第2の関節スロット5606内に受容される第2の関節付勢部材5648とを更に含んでいる。図54は、中立又は非関節運動構成にある関節運動システム5600を示している。この図で分かるように、第1の関節ピン5624は第1の関節付勢部材5628と接触しており、第2の関節ピン5644は第2の関節付勢部材5648と接触している。しかしながら、その中立位置にあるとき、第1及び第2の関節付勢部材5628、5648は圧縮状態になくてもよい。図55は、上記で説明した方式で関節駆動リンク5614によって近位方向「PD」に駆動力「DF」を関節ディスク5602に対して加えるところを示している。近位方向「PD」に駆動力DFを加えることは、結果として、矢印5601によって表される回転方向に関節ディスク5602を回転させることになる。関節ディスク5602が回転方向5601に回転するとき、第2の関節スロットの端部が第2の関節ピン5644と接触し、第2の関節リンケージ5640に、また最終的には第2の関節バー5646に押力を加える。逆に、第1の関節付勢部材5628が、第1の関節スロット5604内で矢印5601の方向に第1の関節ピン5624を押しやり、それにより、引張力が近位方向「PD」に第1の関節リンケージ5620に対して加えられる。この近位引張力は、関節ロック2350を通じて第1の遠位関節ドライバ5370に伝達される。外科用エンドエフェクタに加えられるそのような「押込及び引張モーション」は、矢印5300によって表される方向に関節運動軸線を中心として外科用エンドエフェクタ300を関節運動させることになる。図53を参照されたい。関節ディスク5602が図55に示す位置にあるとき、第2の関節付勢部材5648は圧縮状態にあってもよく、第1の関節付勢部材は圧縮されていなくてもよい。したがって、関節駆動リンク5614に対する駆動力DFの加力が中断されると、第2の関節付勢部材5648は、例えば、図54に示す中立位置へと再び関節ディスク5602を付勢し得る。
Similarly, as shown above, the articulated
逆に、図56に示すように、駆動力「DF」が遠位方向「DD」に関節駆動リンク5614に対して加えられるとき、関節ディスク5602は矢印5603によって表される回転方向に回転する。関節ディスク5602が回転方向5603に回転するとき、第1の関節スロット5604の端部が第1の関節ピン5624と接触し、関節ロック2350を通じて第1の関節リンケージ5620に、また最終的には第1の関節ドライバ5370に押力を加える。加えて、第2の関節付勢部材5648が、第2の関節スロット5606内で矢印5603の方向に第2の関節ピン5644を押しやり、それにより、引張力が近位方向「PD」に第2の関節リンケージ5640に対して加えられる。この近位引張力は、第2の関節バー5646に伝達される。外科用エンドエフェクタ300に加えられるそのような「押込及び引張モーション」は、矢印5302によって表される方向に関節運動軸線を中心として外科用エンドエフェクタ300を関節運動させることになる。図53を参照されたい。関節ディスク5602が図56に示す位置にあるとき、第1の関節付勢部材5628は圧縮状態にあってもよく、第2の関節付勢部材5648は圧縮されていなくてもよい。したがって、関節駆動リンク5614に対する駆動力DFの加力が中断されると、第1の関節付勢部材5628は、例えば、図54に示す中立位置へと再び関節ディスク5602を付勢し得る。
Conversely, as shown in FIG. 56, when the driving force "DF" is applied to the
図57は、細長シャフトアセンブリ5200に動作可能に結合される外科用エンドエフェクタ300へのシャフトフレーム812の遠位端部分814の取付けを示している。上記で説明したように、遠位端部分814は、下向き突出枢動ピン(図示せず)をその上に有し、この下向き突出枢動ピンは、細長チャネル302の近位端部分320に形成された枢動ホール(図示せず)内に枢動的に受容されるように適合されている。かかる構成により、枢動ホールによって規定される関節運動軸線B−Bを中心としたシャフトフレーム812に対する細長チャネル302の枢動的移動が促進される。図57でも分かるように、第1の遠位関節ドライバ5370が第1の玉継手852によって第1のカプラ850に取り付けられている。第1のカプラ850はまた、図57で分かるように、第1のピン854によって細長チャネル302の近位端部分320に枢動的にピン留めされている。同様に、第2の関節バー5646は、第2の玉継手872によって第2のカプラ870に取り付けられている。第2のカプラ870はまた、図57で分かるように、第2のピン874によって細長チャネル302の近位端部分320に枢動的にピン留めされている。
FIG. 57 shows the attachment of the
図53及び58を参照すると、細長シャフトアセンブリ5200はまた、上記で説明したタイプの発射部材900に取り付けられる発射ビームアセンブリ2280を含んでいてもよい。発射ビームアセンブリ2280は発射部材2220に取り付けられるものであり、上記で説明した様々な方式で軸方向に前進及び後退され得る。細長シャフトアセンブリ5200は、外科用エンドエフェクタ300が関節運動軸線B−Bを中心として関節運動されるときに遠位発射ビーム2280を横方向に支持するための複数の支持リンクアセンブリ920を更に備えてもよい。図58で分かるように、複数の支持リンクアセンブリ920は、上記で説明した方式で細長チャネル302の近位端部320に枢動的にピン留めされる中央支持部材922を備えている。中央支持部材922は、それを通じて遠位発射ビーム2280を軸方向に受容するための中央配設スロット930を更に含む。複数の支持リンクアセンブリ920が、近位支持リンク940と遠位支持リンク950とを更に備える。近位支持リンク940は、丸形近位端部943と丸形遠位端部944とを有する本体部分942を有する。近位支持リンク940は、一対の下向き突出側方支持壁945を更に含み、それらの間に近位スロットを画定する。同様に、遠位支持リンク950は、丸形近位端部953と丸形遠位端部954とを有する本体部分952を含む。遠位支持リンク950は、一対の下向き突出側方支持壁955を更に含み、それらの間に遠位スロットを画定する。図58で分かるように、遠位発射ビーム2280は、近位支持リンク940の側方支持壁945と遠位支持リンク950の側方支持壁955との間に延びるように構成されている。各支持壁945及び955は、上記で説明したように、内向きの弓形表面を含む。これらの支持表面は、遠位発射ビーム2280がエンドエフェクタ300の関節運動の間に屈曲するときに、遠位発射ビームアセンブリ2280に側方支持をもたらすように働く。加えて、閉鎖管アセンブリ2260は、外科用エンドエフェクタ300のアンビルと動作可能に相互作用するように構成された、上記で説明したタイプの二重枢動閉鎖スリーブアセンブリを含んでもよい。閉鎖管アセンブリ2260が動作することにより、結果として、外科用エフェクタのアンビルが上記で説明した様々な方式で開放及び閉鎖することになる。
With reference to FIGS. 53 and 58, the
図59は、以下で説明する違いを除いて、細長シャフトアセンブリ5200と実質的に同等であり得る別の細長シャフトアセンブリ5700の一部分を示している。具体的に言えば、関節運動システム5701の関節ディスク5702は、ノズルハウジング201に動作可能に支持されたウォームギヤモータ5710によって回転される。一実施形態では、例えば、被動ギヤ5703が関節ディスク5702と一体的に形成されるかあるいは関節ディスク5702に移動不能に取り付けられ、その結果、モータ5710のウォームギヤ駆動装置5712との噛合い係合をなす。図示の例では、第1の関節ロッド又は部材5720が、本明細書で説明した様々な方式のうちのいずれかで、外科用エンドエフェクタの一部分に直接取り付けられ得る。第1の関節ピン5722が第1の関節ロッド5720に取り付けられ、関節ディスク5702に形成された弓形の第1の関節スロット5704内に受容される。第1の関節ピン5722との接触を付勢するために、第1の関節付勢部材5705が第1の関節スロット5704内に受容されている。同様に、第2の関節ロッド又は部材5730が、本明細書で説明した様々な方式のうちのいずれかで、外科用エンドエフェクタの一部分に直接的に又は間接的に取り付けられ得る。第2の関節ピン5732が第2の関節ロッド5730に取り付けられ、関節ディスク5702に形成された弓形の第2の関節スロット5706内に受容される。第2の関節ピン5732との接触を付勢するために、第2の関節付勢部材5707が第2の関節スロット5706内に受容されている。
FIG. 59 shows a portion of another elongated shaft assembly 5700 that may be substantially equivalent to the
図59は、中立又は非関節運動構成にある関節運動システム5701を示している。この図で分かるように、第1の関節ピン5722は第1の関節付勢部材5705と接触しており、第2の関節ピン5732は第2の関節付勢部材5707と接触している。しかしながら、その中立位置にあるとき、第1及び第2の関節付勢部材5705、5707は圧縮状態になくてもよい。矢印5601によって表される回転方向に関節ディスク5702を回転させるようにモータ5710を作動させることにより、引張モーションが第1の関節ロッド5720に加えられて第1の関節ロッド5720が近位方向「PD」に移動させられると同時に、押込モーションが第2の関節ロッド5730に加えられて第2の関節ロッド5730が遠位方向「DD」に移動させられることになる。逆に、矢印5603によって表される回転方向に関節ディスク5702を回転させるようにモータ5710を作動させることにより、押込モーションが第1の関節ロッド5720に加えられて第1の関節ロッド5720が遠位方向「DD」に移動させられると同時に、引張モーションが第2の関節ロッド5730に加えられて第2の関節ロッド5730が近位方向「PD」に移動させられることになる。外科用エンドエフェクタに加えられるそのような「押込及び引張モーション」は、上記で説明した様々な方式で関節運動軸線を中心として外科用エンドエフェクタを関節運動させることになる。
FIG. 59 shows a joint movement system 5701 in a neutral or non-joint movement configuration. As can be seen in this figure, the first
図60〜65は、本明細書で説明する様々な細長シャフトアセンブリ及びエフェクタ構成と共に用いられ得る別の関節運動システム5800を示している。この実施形態では、しかしながら、関節運動システム5800は、ドライバ関節ディスク5820と被動関節ディスク5830とを備える二重関節ディスクアセンブリ5810を備えている。関節ディスクディスク5820、5830の両方が共通の軸線を中心として独立に回転可能となるように、関節ディスク5820、5830の両方が、例えば、細長シャフトアセンブリのノズルハウジング内に回転可能に支持されてもよい。様々な実施形態において、上記で説明したように関節駆動リンク5614及び発射部材構成2220によって、駆動モーションがドライバ関節ディスク5820に加えられ得る。他の実施形態では、上記で説明した方式でウォームギヤモータ5710によって、回転駆動モーションが駆動関節ディスク5820に加えられ得る。
Figures 60-65 show another
図61は、駆動ディスク5820の一形態を示している。この図で分かるように、駆動ディスク5820は、それぞれが第1の弓形長さ「FL」を有する第1の対の第1の弓形関節スロット5822L、5822Rを含んでいる。加えて、ドライバ関節ディスク5820は、図61で分かるように、第1の関節スロット5822の間に中央に配設されたドライバスロット5824を更に含んでいる。ドライバ関節ディスク5820を駆動するために用いられる方法に応じて、関節駆動リンク5614又はウォームギヤ5710は、上記で説明した様々な方式でドライバ関節ディスク5820とインターフェースして、ドライバ関節ディスク5820に回転モーションを加え得る。図62は、被動関節ディスク5830の一形態を示している。この図で分かるように、被動関節ディスク5830は、それぞれが第1の弓形長さ「FL」よりも短い第2の弓形長さ「SL」を有する第2の対の第2の弓形関節スロット5832L、5832Rを含んでいる。加えて、被動関節ディスク5830は、ドライバスロット5824内に移動可能に受容されるように構成されたドライバポスト5834を更に含んでいる。
FIG. 61 shows one form of the
ここで図60及び63〜65を参照すると、関節運動システム5800は、本明細書で説明した様々な方式のうちのいずれかで、外科用エンドエフェクタの一部分に直接的に又は関節的に取り付けられ得る第1の関節ロッド5840を更に備えている。第1の関節ピン5842が第1の関節ロッド5720に取り付けられ、対応する第1及び第2の弓形関節スロット5822L、5832L内に受容されている。同様に、第2の関節ロッド又は部材5850が、本明細書で説明した様々な方式のうちのいずれかで、同じ外科用エンドエフェクタの一部分に直接的に取り付けられ得る。第2の関節ピン5852が第2の関節ロッド5850に取り付けられ、対応する第1及び第2の弓形関節スロット5822R、5832R内に受容されている。図60は、外科用エンドエフェクタが自在に移動され得るヌル位置にある関節運動システム5800を示している。図63は、矢印5860によって表される方向にドライバ関節ディスク5820に対して回転モーションが最初に加えられた際の関節運動システム5800の配置を示している。この図で分かるように、ドライバ関節ディスク5820の初期の回転の際、関節スロット5822L、5832Lは互いに食い違っており、関節スロット5822R、5832Rも互いに食い違っているが、依然としてモーションは関節ロッド5840、5850に伝達されていない。図64は、矢印5860の方向にドライバ関節ディスク5820に対して回転モーションが引き続き加えられた際の関節運動システム5800の配置を示しており、この回転モーションは、例えば、シャフト軸線に対する外科用エンドエフェクタの75度の関節運動を結果として生じさせるのに十分なものである。この図で分かるように、押込モーションが第1の関節ロッド5840に加えられて第1の関節ロッド5840が遠位方向「DD」に軸方向に移動させられ、引張モーションが第2の関節ロッド5850に加えられて第2の関節ロッド5850が近位方向「PD」に軸方向に移動させられる。第1及び第2の関節ロッド5840、5850が反対方向に移動することにより、結果として、外科用エンドエフェクタの関節運動がそれらと動作可能に連動することになる。図65は、矢印5862によって表される反対方向に駆動関節ディスク5820に対して回転モーションが加えられた際の関節運動システム5800の配置を示しており、この回転モーションは、例えば、反対の関節運動方向にシャフト軸線に対する外科用エンドエフェクタの75度の関節運動を結果として生じさせるのに十分なものである。この図で分かるように、押込モーションが第2の関節ロッド5850に加えられて第2の関節ロッド5850が遠位方向「DD」に軸方向に移動させられ、引張モーションが第1の関節ロッド5840に加えられて第1の関節ロッド5840が近位方向「PD」に軸方向に移動させられる。このように第1及び第2の関節ロッド5840、5850が反対に移動することにより、結果として、それらに動作可能に取り付けられている外科用エンドエフェクタの関節運動が生じることになる。一構成では、第1の関節ロッド5840は、関節駆動ディスク5820が75度の関節運動範囲を獲得するように十分な距離だけ回転されているときに、外科用エンドエフェクタに引張力のみを加えてもよい。
With reference to FIGS. 60 and 63-65, the
図66〜70は、シャフト軸線SA−SAに対して開放位置と閉鎖位置との間で同時に移動可能である第1及び第2の顎部を備える外科用エンドエフェクタ6300を示している。第1及び第2の顎部は、本発明の趣旨及び範囲から逸脱することなく多様な外科用顎部構成を備え得る。外科用エンドエフェクタの顎部を用いて標的組織へのアクセスを得ることは、時には困難となり得る。外科用エンドエフェクタ、特に組織を切断及びステープル留めするように構成された外科用エンドエフェクタの操作性は、顎部が互いに対して支持される点と、最近位のステープル位置との間の距離が最小化される場合に向上され得る。例えば、可動顎部を1つのみ用いる(すなわち、顎部の一方がシャフト軸線に対して固定される)外科用エンドエフェクタは、標的組織を収容するために一方の可動顎部が比較的広い移動範囲を有することを必要とし得る。そのようなより広い移動範囲は、エンドエフェクタを使用して標的組織を有利に配置するプロセスを複雑化し得る。外科用エンドエフェクタ6300は、共通の枢動軸線を中心として、互いに対してまたシャフト軸線に対して移動する第1及び第2の顎部を用いている。そのような構成により、例えば、枢動軸線と最近位のステープル位置との間の距離が、可動顎部を1つのみ用いる特定の外科用エンドエフェクタにおける同じ距離と比較して短縮されることが可能となる。
FIGS. 66-70 show a
図示の例では、第1の顎部6310は、外科用ステープルカートリッジ6320を中に支持するように構成された細長チャネル6312を含んでいる。図70で分かるように、外科用ステープルカートリッジ6320は、その中に複数のステープルドライバ6322を動作可能に支持するように構成されており、ステープルドライバ6322はその上で外科用ステープル6324を動作可能に支持する。ステープルドライバ6322は、外科用ステープルカートリッジ6320内に形成された対応するドライバスロット6321内に移動可能に支持される。ステープルドライバ6322は、カートリッジパン6330によってそれぞれのドライバスロット6321内に保持され、カートリッジパン6330は、外科用ステープルカートリッジ6320にクリップ留めされるかあるいは別様に取り付けられる。ステープルドライバ6322は、それを通じた発射部材6340の軸方向通路に適応するように、外科用ステープルカートリッジ6320の細長スロット6326の各側部に列をなして配列されている。ウェッジスレッド6350が外科用ステープルカートリッジ6320内で移動可能に支持されており、発射部材6340が外科用ステープルカートリッジ6320の近位端部に隣接する開始位置から外科用ステープルカートリッジ6320の遠位端部内の終了位置へと駆動されるときに、発射部材6340によって駆動的に係合されるように構成されている。上記で説明したように、ウェッジスレッド6350が外科用ステープルカートリッジ6320を通じて遠位方向に駆動されるとき、ウェッジスレッド6350はステープルドライバ6322と駆動的に接触して、それらをカートリッジデッキ表面6323に向かって駆動する。発射部材6340は組織切断表面6346を含み、組織切断表面6346は、発射部材6340が遠位側に駆動されるときに、顎部の間にクランプされた組織を切断するように働くものである。本明細書で説明した様々なタイプの遠位発射ビーム(図示せず)が、発射部材6340並びに中間発射シャフト部分2222又は他の発射システム構成に動作可能に取り付けられる。遠位発射ビームを駆動及び後退させるための中間発射シャフト部分2222の動作については、上記で詳細に説明されており、簡潔にするために繰り返されない。本発明の趣旨及び範囲から逸脱することなく、発射部材に動力供給するために、他の発射ビーム及び発射システム構成(モータ駆動式並びに手動駆動式)がまた用いられ得る。
In the illustrated example, the
図示の外科用エンドエフェクタ6300はまた、シャフト軸線SA−SAを実質的に横断する関節運動軸線B−Bを中心として選択的に関節運動するように構成されている。図66〜70で分かるように、外科用エンドエフェクタ6300はエンドエフェクタ装着アセンブリ6390を含み、エンドエフェクタ装着アセンブリ6390は、例えば、エンドエフェクタ装着アセンブリ6390の装着ホール6392内に回転可能に受容されるように構成された枢動ピンを含む遠位シャフトフレーム(図示せず)に枢動的に装着されるように適合されている。外科用エンドエフェクタ6300は、上記で説明したタイプの関節ロック並びに第1及び第2の関節ロッド構成によって関節運動され得る。図70で分かるように、エンドエフェクタ装着アセンブリ6390は、一対の両側の側方延出トラニオンピン6394を更に含んでいる。トラニオンピン6394は、エンドエフェクタ装着アセンブリ6390の両側の外側部6391から横方向に延びており、外側部6391はまた、発射部材6340を中に受容するように構成されたポケットエリア6395を画定している。トラニオンピン6394は、第1及び第2の顎部6310、6360がそれを中心として枢動し得る枢動軸線PA−PAを規定するように働く。第1の顎部6310又は細長チャネル6312の近位端部6314は、トラニオンピン6394のうちの対応する1つを中に受容するように適合された、一対の対向するU字形状の又は開放型のスロット6316を含む。そのような構成は、エンドエフェクタ装着アセンブリ6390に対して第1の顎部6310を移動可能に又は枢動的に軸支するように働く。
The illustrated
図示の外科用エンドエフェクタ6300は、アンビル6362を備え得る第2の顎部6360を更に備えている。図示のアンビル6362は、細長スロット6366と、各側部に形成された2つのステープル成形表面6368とを含むアンビル本体6364を含んでいる。アンビル6362は近位端部分6370を更に有し、近位端部分6370は、同様にトラニオンピン6394のうちの対応する1つを中に受容するように適合された、一対のU字形状の又は開放型のスロット6372を有している。そのような構成は、エンドエフェクタ装着アセンブリ6390に対して第2の顎部6360を移動可能に又は枢動的に軸支するように働き、その結果、第1及び第2の顎部は、互いに対して移動し得るだけでなく、シャフト軸線SA−SAに対しても移動し得るようになる。第1及び第2の顎部6310及び6360は、本明細書で説明した様々なタイプの閉鎖システムによって移動可能に作動され得る。例えば、本明細書で説明した方式で閉鎖管を作動させるために、本明細書で説明したタイプの第1の閉鎖駆動システムが用いられ得る。閉鎖管はまた、上記で説明した方式で二重枢動閉鎖スリーブアセンブリによって閉鎖管に枢動的に取り付けられ得るエンドエフェクタ閉鎖スリーブ6272に取り付けられ得る。上記で説明したように、例えば、閉鎖管の軸方向移動は、閉鎖トリガ32の作動を通じて制御され得る。図67〜69で分かるように、エンドエフェクタ閉鎖スリーブ6272は、エンドエフェクタ装着アセンブリ6390に被さって延びており、第2の顎部6360の近位端部6370並びに第1の顎部6310の近位端部6314と係合するように構成されている。少なくとも1つのカム表面6336が第1の顎部6310の近位端部6314上に形成されてもよく、それにより、エンドエフェクタ閉鎖スリーブ6272の遠位端部6274がカム表面6336と接触するとき、第1の顎部6310は、第2の顎部及びシャフト軸線SA−SAに向かってカム駆動される。同様に、1つ又は2つ以上のカム表面6376が第2の顎部6360の近位端部分6370上に形成されてもよく、それにより、エンドエフェクタ閉鎖スリーブ6272の遠位端部6274によって接触されるとき、第2の顎部6360は、第1の顎部6310及びシャフト軸線SA−SAに向かって移動される。カム表面6336、6376は、第1及び第2の顎部が互いに対して種々の「閉鎖速度」又は閉鎖時間で閉鎖するように、互いに対して構成及び配置され得る。そのような1つの構成が図68に示されている。図68で分かるように、第1及び第2の顎部がそれぞれの完全開放位置にあるときの、第1の顎部6310上の点P1と第2の顎部6360上の対応する点P2との間の弓形経路に沿った距離は、DTによって表される。第1及び第2の点P1及びP2は、互いに「対応」していると言われる。例えば、第1の点P1と第2の点P2はそれぞれ、それらの間に延びかつシャフト軸線SA−SAに対して垂直である共通の線又は軸線上にあってよい。第1の顎部6310上の別の点PAとシャフト軸線SA−SAとの間の弓形経路に沿った距離は、D1によって表され、第2の顎部上の別の対応する点PBとシャフト軸線SA−SAとの間の別の弓形経路に沿った距離は、D2によって表される。点PA及び点PBはまた、互いに対応していると言われる。例えば、点PAと点PBは、それらの間に延びかつシャフト軸線SA−SAに対して垂直である共通の線又は軸線上にあってよい。図示の構成では、第2の顎部6360又はアンビル6362が、完全開放位置から、アンビル6362のステープル成形表面がシャフト軸線SA−SAに沿って位置する閉鎖位置へと移動する距離D2は、第1の顎部6310又は外科用ステープルカートリッジ6320が、完全開放位置から、カートリッジデッキ表面がシャフト軸線SA−SAに沿って位置する閉鎖位置へと移動する距離D1よりも長い。例えば、少なくとも1つの構成では、第2の顎部又はアンビルは、距離DTのうちの2/3(又は顎部の間の別の移動経路に沿った別の距離)にわたって開放又は移動し、第1の顎部又はステープルカートリッジは、距離DTのうちの1/3(又は顎部の間の更に別の移動経路に沿った他の距離)にわたって開放又は移動し、したがって、本質的に、閉鎖モーションが同じか又は同等の時間に両方の顎部に初期に加えられた場合でも、一方の顎部は、もう一方の顎部がその完全閉鎖位置を獲得するよりも迅速に又は高速にその完全閉鎖位置を獲得する。例えば、第1及び第2の顎部上のカム表面は、本発明のこの実施形態の趣旨及び範囲から逸脱することなく、種々の顎部移動比/速度を獲得するように配列/構成され得る。エンドエフェクタ閉鎖スリーブ6272が開始又は非作動位置にあるときに、第1及び第2の顎部6310、6360を開放位置へと付勢するために、開放スプリング6380(図70)が第1の顎部6310の近位端部6314と第2の顎部6360の近位端部6370との間に配置されてもよい。図67〜69を参照されたい。
The illustrated
第1及び第2の顎部6310、6360を閉鎖位置(図66)に移動させるために、臨床医は閉鎖システムを作動させて、第1の顎部6310の近位端部6314上のカム表面6336と第2の顎部6360の近位端部6370上のカム表面6376とに同時に接触して第1及び第2の顎部6310、6360を図66に示す位置へと互いに(またシャフト軸線SA−SAに)向かって付勢するように、エンドエフェクタ閉鎖スリーブ6272を遠位方向「DD」に移動させる。エンドエフェクタ閉鎖スリーブ6272がこの位置に保持されている間、第1及び第2の顎部6310及び6360は、この閉鎖位置に保持される。その後、発射システムは、外科用エンドエフェクタ6300を通じて遠位側に発射部材6340を軸方向に前進させるように作動され得る。図70で分かるように、発射部材6340は、アンビル6362のスロット付き通路6374と摺動可能に係合するように構成されたフット部分6342と、細長チャネル6312のスロット付き通路6318内に摺動可能に受容されるように適合された上部タブ部分6344とを有し得る。図69を参照されたい。したがって、そのような発射部材構成は、発射部材の発射の間(すなわち、ステープルの発射及び第1の顎部6310と第2の顎部6360との間にクランプされた組織の切断の間)に、第1及び第2の顎部6310、6360を所望の離間配置に確実に保持するように働く。組立ての目的だけでなく、発射部材6340の動作を妨害又は干渉し得る、第1及び第2の顎部への組織及び/又は体液の侵入を防止するために、第1の顎部カバー6315が細長チャネル6312に着脱可能に取り付けられ、第2の顎部カバー6363がアンビル6362に着脱可能に取り付けられる。
To move the first and
図71は、外科用エンドエフェクタ6300と類似した別の外科用エンドエフェクタ6300’を示している。この図で分かるように、外科用エンドエフェクタ6300’は、シャフト軸線SA−SAに対して開放位置と閉鎖位置との間で同時に移動可能である2つの顎部を備えている。図示の例では、第1の顎部6310’は、外科用ステープルカートリッジ6320’を中に支持するように構成された細長チャネル6312’を含んでいる。外科用ステープルカートリッジ6320’は、その中に複数のステープルドライバ6322を動作可能に支持するように構成されており、ステープルドライバ6322はその上で外科用ステープル6324を動作可能に支持する。ステープルドライバ6322は、外科用ステープルカートリッジ6320’内に形成された対応するドライバポケット6321’内に移動可能に支持される。ステープルドライバ6322は、カートリッジパン6330’によってそれぞれのドライバスロット6321’内に保持され、カートリッジパン6330’は、外科用ステープルカートリッジ6320’にクリップ留めされるかあるいは別様に取り付けられる。ステープルドライバ6322は、それを通じた発射部材6340’の軸方向通路に適応するように、外科用ステープルカートリッジ6320の細長スロット6326’の各側部に列をなして配列されている。ウェッジスレッド6350’が外科用ステープルカートリッジ6320’内で移動可能に支持されており、発射部材6340’が外科用ステープルカートリッジ6320’の近位端部に隣接する開始位置から外科用ステープルカートリッジ6320’の遠位端部内の終了位置へと駆動されるときに、発射部材6340’によって駆動係合されるように構成されている。上記で説明したように、ウェッジスレッド6350’が外科用ステープルカートリッジ6320’を通じて遠位方向に駆動されるとき、ウェッジスレッド6350’はステープルドライバ6322と駆動的に接触して、それらをカートリッジデッキ表面6323’に向かって駆動する。発射部材6340’は組織切断表面6346’を含み、組織切断表面6346’は、発射部材6340が遠位側に駆動されるときに、顎部の間にクランプされた組織を切断するように働くものである。本明細書で説明した様々なタイプの遠位発射ビーム(図示せず)が、発射部材6340’並びに中間発射シャフト部分2222又は他の発射システム構成に動作可能に取り付けられる。遠位発射ビームを駆動及び後退させるための中間発射シャフト部分2222の動作については、上記で詳細に説明されており、簡潔にするために繰り返されない。本発明の趣旨及び範囲から逸脱することなく、発射部材に動力供給するために、他の発射ビーム及び発射システム構成(モータ駆動式並びに手動駆動式)がまた用いられ得る。
FIG. 71 shows another surgical end effector 6300'similar to the
図示の外科用エンドエフェクタ6300’はまた、シャフト軸線SA−SAを実質的に横断する関節運動軸線B−Bを中心として選択的に関節運動するように構成されている。エンドエフェクタ6300’はエンドエフェクタ装着アセンブリ6390’を含み、エンドエフェクタ装着アセンブリ6390’は、例えば、エンドエフェクタ装着アセンブリ6390’の装着ホール6392’内に回転可能に受容されるように構成された枢動ピンを含む遠位シャフトフレームに枢動的に装着されるように適合されている。外科用エンドエフェクタ6300’は、上記で説明したタイプの関節ロック並びに第1及び第2の関節ロッド構成によって関節運動され得る。図71で分かるように、エンドエフェクタ装着アセンブリ6390’は、一対の両側の側方延出トラニオンピン6394’を更に含んでいる。トラニオンピン6394’は、エンドエフェクタ装着アセンブリ6390’の両側の外側部6391’から横方向に延びており、外側部6391’はまた、発射部材6340’を中に受容するように構成されたポケットエリア6395’を画定している。トラニオンピン6394’は、第1及び第2の顎部6310’、6360’がそれを中心として枢動し得る枢動軸線PA−PAを規定するように働く。第1の顎部6310’又は細長チャネル6312’の近位端部6314’は、トラニオンピン6394’のうちの対応する1つを中に受容するように適合された、一対の対向するU字形状の又は開放型のスロット6316’を含む。そのような構成は、エンドエフェクタ装着アセンブリ6390’に対して第1の顎部6310’を移動可能に又は枢動的に軸支するように働く。 The illustrated surgical end effector 6300'is also configured to selectively articulate around the articulation axis BB that substantially traverses the shaft axis SA-SA. The end effector 6300' includes an end effector mounting assembly 6390', and the end effector mounting assembly 6390' is configured to be rotatably received, for example, in the mounting hole 6392' of the end effector mounting assembly 6390'. It is adapted to be pivotally mounted to the distal shaft frame containing the pins. The surgical end effector 6300'can be articulated by the type of joint lock described above as well as the first and second joint rod configurations. As can be seen in FIG. 71, the end effector mounting assembly 6390' further includes a pair of bilateral laterally extending trunnion pins 6394'. The trunnion pin 6394' extends laterally from the outer 6391'on both sides of the end effector mounting assembly 6390', and the outer 6391'also has a pocket area configured to receive the launching member 6340'into. It defines 6395'. The trunnion pin 6394'acts to define the pivot axis PA-PA on which the first and second jaws 6310', 6360' can be pivoted around it. The first jaw 6310'or the proximal end 6314' of the elongated channel 6312'is a pair of opposing U-shapes adapted to receive the corresponding one of the trunnion pins 6394'. Includes or open slot 6316'. Such a configuration acts to movably or pivotally support the first jaw 6310'with respect to the end effector mounting assembly 6390'.
図示の外科用エンドエフェクタ6300’は、アンビル6362’を備え得る第2の顎部6360’を更に備えている。図示のアンビル6362’は、細長スロット6366’と、各側部に形成された2つのステープル成形表面とを含むアンビル本体6364’を含んでいる。アンビル6362’は近位端部分6370’を更に有し、近位端部分6370’は、同様にトラニオンピン6394’のうちの対応する1つを中に受容するように適合された、一対のU字形状の又は開放型のスロット6372’を有している。そのような構成は、エンドエフェクタ装着アセンブリ6390’に対して第2の顎部6360’を移動可能に又は枢動的に軸支するように働く。第1及び第2の顎部6310’及び6360’は、本明細書で説明した様々なタイプの閉鎖システムによって移動可能に作動される。例えば、本明細書で説明した方式で閉鎖管260を作動させるために、第1の閉鎖駆動システム30が用いられ得る。閉鎖管260はまた、上記で説明した方式で二重枢動閉鎖スリーブアセンブリ271によって閉鎖管260に枢動的に取り付けられ得るエンドエフェクタ閉鎖スリーブ6272に取り付けられ得る。上記で説明したように、例えば、閉鎖管260の軸方向移動は、閉鎖トリガ32の作動を通じて制御され得る。エンドエフェクタ閉鎖スリーブ6272は、エンドエフェクタ装着アセンブリ6390’に被さって延びており、第2の顎部6360’の近位端部6370’並びに第1の顎部6310’の近位端部6314’と係合するように構成されている。少なくとも1つのカム表面6336’が第1の顎部6310’の近位端部6314’上に形成されてもよく、それにより、エンドエフェクタ閉鎖スリーブ6272の遠位端部6274がカム表面6336’と接触するとき、第1の顎部6310’は、第2の顎部6360’及びシャフト軸線SA−SAに向かってカム駆動される。同様に、1つ又は2つ以上のカム表面6376’が第2の顎部6360’の近位端部分6370’上に形成されてもよく、それにより、エンドエフェクタ閉鎖スリーブ6272の遠位端部6274によって接触されるとき、第2の顎部6360’は、第1の顎部6310’及びシャフト軸線SA−SAに向かって移動される。エンドエフェクタ閉鎖スリーブ6272が開始又は非作動位置にあるときに、第1及び第2の顎部6310’、6360’を開放位置へと付勢するために、スプリング(図示せず)が第1の顎部6310’の近位端部6314’と第2の顎部6360’の近位端部6370’との間に配置されてもよい。
The illustrated surgical end effector 6300'also further comprises a second jaw 6360' which may include anvil 6362'. The illustrated anvil 6362'includes an anvil body 6364' that includes an elongated slot 6366'and two staple-molded surfaces formed on each side. The anvil 6362'has an additional proximal end portion 6370', and the proximal end portion 6370'is also adapted to accept the corresponding one of the trunnion pins 6394'into a pair of U's. It has a letter-shaped or open slot 6372'. Such a configuration acts to movably or pivotally support the second jaw portion 6360'with respect to the end effector mounting assembly 6390'. The first and second jaws 6310'and 6360' are movably actuated by the various types of closure systems described herein. For example, a first
第1及び第2の顎部6310’、6360’を閉鎖位置に移動させるために、臨床医は閉鎖システムを作動させて、第1の顎部6310’の近位端部6314’上のカム表面6336’と第2の顎部6360’の近位端部6370’上のカム表面6376’とに同時に接触して第1及び第2の顎部6310’、6360’を互いに(またシャフト軸線SA−SAに)向かって付勢するように、エンドエフェクタ閉鎖スリーブ6272を遠位方向「DD」に移動させる。エンドエフェクタ閉鎖スリーブ62772がこの位置に保持されている間、第1及び第2の顎部6310’及び6360’は、この閉鎖位置に保持される。その後、発射システムは、外科用エンドエフェクタ6300’を通じて遠位側に発射部材6340’を軸方向に前進させるように作動され得る。発射部材6340’は、アンビル6362’のスロット付き通路6374’と摺動可能に係合するように構成された上部タブ部分6344’と、細長チャネル6312’のスロット付き通路内に摺動可能に受容されるように適合されたフット部分6342’とを有し得る。したがって、そのような発射部材構成は、発射部材の発射の間(すなわち、ステープルの発射及び第1の顎部6310’と第2の顎部6360’との間にクランプされた組織の切断の間)に、第1及び第2の顎部6310’、6360’を所望の離間配置に確実に保持するように働く。組立ての目的だけでなく、発射部材6340’の動作を妨害又は干渉し得る、第1及び第2の顎部への組織及び/又は体液の侵入を防止するために、第1の顎部カバー6315’が細長チャネル6312’に着脱可能に取り付けられ、第2の顎部カバー6363’がアンビル6362’に着脱可能に取り付けられる。
To move the first and second jaws 6310', 6360' to the closed position, the clinician activates the closure system to activate the cam surface on the proximal end 6314' of the first jaw 6310'. Simultaneously contact the 6336'and the cam surface 6376' on the proximal end 6370' of the second jaw 6360' to bring the first and second jaws 6310', 6360' to each other (and shaft axis SA- The end
双方が互いに対して、またシャフト軸線に対して移動する顎部を用いる、本明細書で説明した外科用エンドエフェクタの実施形態は、顎部の一方が、例えばシャフト軸線に対して固定され移動しない他の外科用エンドエフェクタ構成をしのぐ様々な利点を提供し得る。そのような構成では、標的組織を操作し、配置し、次いで間にクランプすることが可能となるように、一方の可動顎部は、固定された顎部に対して比較的広い移動範囲を有することが多くの場合に望ましい。両方の顎部が移動可能である実施形態では、各顎部は、それらの間の標的組織の操作、配置及びクランプに適応するために、広範囲のモーションを必要としない。例えば、アンビルの移動がそのように低減されることは、組織の配置の改善をもたらし得る。そのような構成はまた、枢動軸線と第1のステープル位置との間の距離を最小にすることを可能にし得る。加えて、発射部材は常に、開放及び閉鎖動作の間にも、可動顎部(アンビル及び細長チャネル)と依然として係合された状態にあり得る。 In the surgical end effector embodiments described herein, where both use jaws that move relative to each other and with respect to the shaft axis, one of the jaws is fixed, eg, with respect to the shaft axis, and does not move. It may offer various advantages over other surgical end effector configurations. In such a configuration, one movable jaw has a relatively wide range of movement relative to the fixed jaw so that the target tissue can be manipulated, placed and then clamped in between. Is often desirable. In embodiments where both jaws are mobile, each jaw does not require extensive motion to adapt to the manipulation, placement and clamping of the target tissue between them. For example, such reduction of anvil movement can result in improved organizational placement. Such a configuration may also make it possible to minimize the distance between the pivot axis and the first staple position. In addition, the launching member may always remain engaged with the movable jaw (anvil and elongated channels) during the opening and closing movements.
図72〜79は、シャフト軸線SA−SAを規定する、本明細書で説明したタイプの細長シャフトアセンブリに動作可能に取り付けられるように構成された別の外科用エンドエフェクタ6400を示している。外科用エンドエフェクタ6400は、シャフト軸線SA−SAに対して開放位置と閉鎖位置との間で同時に移動可能である2つの顎部を備えている。第1及び第2の顎部は、多種多様な外科関連の顎部構成を備え得る。図示の例では、第1の顎部6410は、外科用ステープルカートリッジ6420を中に支持するように構成された細長チャネル6412を含んでいる。上記で説明した様々な外科用ステープルカートリッジと同様に、外科用ステープルカートリッジ6420は、その中に複数のステープルドライバ(図示せず)を動作可能に支持するように構成されており、ステープルドライバはその上で外科用ステープル(図示せず)を動作可能に支持する。ステープルドライバは、外科用ステープルカートリッジ6420内に形成された対応するドライバポケット内に移動可能に支持される。ステープルドライバは、それを通じた発射部材6440の軸方向通路に適応するように、外科用ステープルカートリッジ6420の細長スロット(図示せず)の各側部に列をなして配列されている。ウェッジスレッド(図示せず)が外科用ステープルカートリッジ6420内で移動可能に支持されており、発射部材6440が外科用ステープルカートリッジ6420の近位端部に隣接する開始位置から外科用ステープルカートリッジ6420の遠位端部内の終了位置へと駆動されるときに、発射部材6440によって駆動係合されるように構成されている。上記で説明したように、ウェッジスレッドが外科用ステープルカートリッジ6420を通じて遠位方向に駆動されるとき、ウェッジスレッドはステープルドライバと駆動的に接触して、それらをカートリッジデッキ表面(図示せず)に向かって駆動する。発射部材6440は組織切断表面6446を含み、組織切断表面6446は、発射部材6440が遠位側に駆動されるときに、顎部の間にクランプされた組織を切断するように働くものである。本明細書で説明した様々なタイプの遠位発射ビーム(図示せず)が、発射部材6440並びに中間発射シャフト部分2222又は他の発射システム構成に動作可能に取り付けられる。遠位発射ビームを駆動及び後退させるための中間発射シャフト部分2222の動作については、上記で詳細に説明されており、簡潔にするために繰り返されない。本発明の趣旨及び範囲から逸脱することなく、発射部材に動力供給するために、他の発射ビーム及び発射システム構成(モータ駆動式並びに手動駆動式)がまた用いられ得る。
FIGS. 72-79 show another
図示の外科用エンドエフェクタ6400はまた、シャフト軸線SA−SAを実質的に横断する関節運動軸線B−Bを中心として選択的に関節運動するように構成されている。図72〜79で分かるように、外科用エンドエフェクタ6400はエンドエフェクタ装着アセンブリ6490を含み、エンドエフェクタ装着アセンブリ6490は、例えば、エンドエフェクタ装着アセンブリ6490の装着ホール6492内に回転可能に受容されるように構成された枢動ピンを含む遠位シャフトフレームに枢動的に装着されるように適合されている。外科用エンドエフェクタ6400は、上記で説明したタイプの関節ロック並びに第1及び第2の関節ロッド構成によって関節運動され得る。図74で分かるように、一対のカムプレート6500が、例えば、エンドエフェクタ装着アセンブリ6490にスプリングピン6502によって移動不能に取り付けられている。図74で更に分かるように、各カムプレート6500は、閉鎖ウェッジ部分6505と開放ウェッジ部分6507とを有するカムスロット6504を有している。閉鎖ウェッジ部分6505は、2つの対向する閉鎖カム表面6506から形成され、開放ウェッジ部分6507は2つの対向する開放カム表面6508から形成されている。細長チャネル6412は2つの近位延出アクチュエータアーム6416を含み、これらの近位延出アクチュエータアーム6416はそれぞれ、それらから側方に突出する開放トラニオンピニオン6418と閉鎖トラニオンピン6419とを有している。開放及び閉鎖トラニオンピン6418及び6419は、対応するカムプレート6500のカムスロット6504を用いて受容される。そのような構成は、エンドエフェクタ装着アセンブリ6490に対して第1の顎部6410を移動可能に又は枢動的に軸支するように働く。
The illustrated
図示の外科用エンドエフェクタ6400は、アンビル6462を備え得る第2の顎部6460を更に備えている。図示のアンビル6462は、細長スロット6466と、各側部に形成された2つのステープル成形表面6468とを含むアンビル本体6464を含んでいる。アンビル6462は近位端部分6470を更に有し、近位端部分6470は、それから突出する2つの近位延出アクチュエータアーム6472を含む。各アクチュエータアーム6472は、それらから側方に突出する開放トラニオンピニオン6474と閉鎖トラニオンピン6476とを有し、それらはまた、対応するカムプレート6500のカムスロット6504内に受容される。そのような構成は、エンドエフェクタ装着アセンブリ6490に対して第2の顎部6460を移動可能に又は枢動的に軸支するように働く。
The illustrated
第1及び第2の顎部6410及び6460は、本明細書で説明した様々なタイプの閉鎖システムによって移動可能に作動される。例えば、上記で説明した方式で閉鎖管を作動させるために、第1の閉鎖駆動システム30が用いられ得る。閉鎖管260はまた、上記で説明した方式で二重枢動閉鎖スリーブアセンブリによって閉鎖管に枢動的に取り付けられ得るエンドエフェクタ閉鎖スリーブ6572に取り付けられ得る。上記で説明したように、例えば、閉鎖管の軸方向移動は、閉鎖トリガの作動を通じて制御され得る。図77及び78で分かるように、エンドエフェクタ閉鎖スリーブ6572は、エンドエフェクタ装着アセンブリ6490並びに第1の顎部6410のアクチュエータアーム6416及び第2の顎部6460のアクチュエータアーム6472に被さって延びている。閉鎖スリーブ6572が遠位側に前進されるとき、閉鎖スリーブ6572の遠位端部6574は、第1の顎部6410の近位端部6411及び第2の顎部6460の近位端部6461と接触し、第1及び第2の顎部6410、6460を遠位方向「DD」に移動させる。第1及び第2の顎部6410、6460が遠位側に移動するとき、閉鎖トラニオン6419、6476は、カムスロット6504の閉鎖ウェッジ部分6505に進入し、閉鎖カム表面6506は、第1及び第2の顎部6410、6460を閉鎖位置へと互いに向かってカム駆動する(図73、75、77及び78)。
The first and
閉鎖スリーブ6572を用いた第1及び第2の顎部6410、6460の開放を促進するために、閉鎖スリーブ6572は、2つの内向き延出開放タブ6576を設けられており、これらの内向き延出開放タブ6576は、閉鎖スリーブ6572が閉鎖システムによって近位方向「PD」に後退されるときに閉鎖トラニオン6419、6476と係合するように構成されている。図72及び76で分かるように、例えば、閉鎖スリーブ6572が近位方向「PD」に移動するとき、開放タブ6576は閉鎖トラニオン6419、6476と接触し、同様に閉鎖トラニオン6419、6476を近位方向に駆動する。閉鎖トラニオン6419、6476が近位側に移動することにより、開放トラニオン6418及び6474はカムプレートスロット6504の開放ウェッジ部分6507に進入することになる。開放カム表面6508は、図76及び79に示すように、開放トラニオン6418、6474と相互作用し、アクチュエータアーム6416及び6472に、それぞれのロッカー表面6417及び6475上でロック開放(rock open)させる。第1及び第2の顎部の両方がシャフト軸線SA−SAに対して移動する上述の構成と同様に、閉鎖ウェッジ部分6505及び開放ウェッジ部分6507は、第1及び第2の顎部がそれらに閉鎖モーションが加えられると、異なる閉鎖速度又は閉鎖時間で互いに対して閉鎖するように構成され得る。
In order to facilitate the opening of the first and
図80〜84は、一方の顎部が開放位置と閉鎖位置との間で他方の顎部に対して移動可能である、2つの顎部を備えた別の外科用エンドエフェクタ7400を示している。図示の例では、第1の顎部7410はアンビル7412を備えている。図示のアンビル7412はアンビル本体7414を有し、アンビル本体7414は、エンドエフェクタ装着アセンブリ7430に移動不能に取り付けられる近位端部分7416を有している。例えば、近位端部分7416は、各々が装着ホール7419を中に有する2つの直立外側壁7418を備える。図82を参照されたい。エンドエフェクタ装着アセンブリ7430は、直立外側壁7418の間に受容され、その直立外側壁7418を通じてホール7419へと延びるスプリングピン7421によって、直立外側壁7418に移動不能に取り付けられる。エンドエフェクタ装着アセンブリ7430は、例えば、エンドエフェクタ装着アセンブリ7430の装着ホール7432内に回転可能に受容されるように構成された枢動ピンを含む遠位シャフトフレームに枢動的に装着されるように適合されている。外科用エンドエフェクタ7400は、本発明の趣旨及び範囲から逸脱することなく、上記で説明したタイプの関節ロック並びに第1及び第2の関節ロッド構成によって、あるいは、本明細書で説明した様々な関節運動システム並びに関節ロッド及び/又はロッド/ケーブル構成によって関節運動され得る。同様に図80及び82で分かるように、アンビル本体7414はまた、各側部に形成された2つのステープル成形表面7424を有する細長スロット7422を含む。
FIGS. 80-84 show another
外科用エンドエフェクタ7400は、細長チャネル7442を備える第2の顎部7440を更に含み、この細長チャネル7442は、外科用ステープルカートリッジ7450を支持するように構成されている。上記で説明した特定の外科用ステープルカートリッジと同様に、外科用ステープルカートリッジ7450は、その中に複数のステープルドライバ(図示せず)を動作可能に支持するように構成されており、ステープルドライバはその上で外科用ステープル(図示せず)を動作可能に支持する。ステープルドライバは、外科用ステープルカートリッジ7450内に形成された対応するドライバポケット7452内に移動可能に支持される。ステープルドライバは、それを通じた発射部材7460の軸方向通路に適応するように、外科用ステープルカートリッジ7450の細長スロット7454の各側部に列をなして配列されている。外科用エンドエフェクタ7400が様々な方向に操作されるときに、ステープルドライバがそれぞれのドライバポケット7452から外れるのを防止するために、カートリッジパン7451がステープルカートリッジ7450に取り付けられる。ウェッジスレッド7462が外科用ステープルカートリッジ7450内で移動可能に支持されており、発射部材7460が外科用ステープルカートリッジ7450の近位端部に隣接する開始位置から外科用ステープルカートリッジ7450の遠位端部内の終了位置へと駆動されるときに、発射部材7460によって駆動係合されるように構成されている。上記で説明したように、ウェッジスレッド7462が外科用ステープルカートリッジ7450を通じて遠位方向に駆動されるとき、ウェッジスレッド7462はステープルドライバと駆動的に接触して、それらをカートリッジデッキ表面(図示せず)に向かって駆動する。発射部材7460は組織切断表面7464を含み、組織切断表面7464は、発射部材7460が遠位側に駆動されるときに、顎部7410、7440の間にクランプされた組織を切断するように働くものである。本明細書で説明した様々な他のタイプの遠位発射ビーム280が、発射部材7460並びに中間発射シャフト部分2222又は他の発射システム構成に動作可能に取り付けられる。遠位発射ビーム280を駆動及び後退させるための中間発射シャフト部分2222の動作については、上記で詳細に説明されており、簡潔にするために繰り返されない。本発明の趣旨及び範囲から逸脱することなく、発射部材に動力供給するために、他の発射ビーム及び発射システム構成(モータ駆動式並びに手動駆動式)がまた用いられ得る。組立ての目的だけでなく、発射部材6340の動作を妨害又は干渉し得る、第1及び第2の顎部への組織及び/又は体液の侵入を防止するために、第1の顎部カバー7415がアンビル7412に着脱可能に取り付けられ、第2の顎部カバー7441が第2の顎部7440に着脱可能に取り付けられる。
The
図82で分かるように、細長チャネル7442は、2つの外側壁7445を有する近位端部分7444を含んでいる。各外側部分7445は、その中に対応するU字形状の又は開放型のスロット7446を有し、そのスロット7446は、アンビル本体7414の近位端部分7416から側方に突出する対応する枢動ピン7426を受容するように適合されている。そのような構成は、第1の顎部7410又はアンビル7412に対して第2の顎部7440又は細長チャネル7442を移動可能に又は枢動的に軸支するように働く。図80、82及び84において最も具体的に見られるように、閉鎖ランプセグメント7447が細長チャネル7442の近位端部7444上に形成されている。加えて、近位端部分7444の各外側部7445は、その中に側方陥凹エリア7448を形成されている。各側方陥凹エリア7448は、対応する閉鎖ランプセグメント7447の近位側に配置されている。開放ランプ又はカム7449が、各側方陥凹エリア7448の近位端部に隣接して形成されている。各開放ランプ又はカム7449は、上部表面7580において終端している。図82及び84を参照されたい。
As can be seen in FIG. 82, the
第2の顎部7440又は細長チャネル7442は、本明細書で開示される様々なタイプの閉鎖システムによって、第1の顎部7410又はアンビル7412に対して移動可能に作動され得る。例えば、上記で詳細に説明したように、本明細書で説明したタイプの閉鎖管を作動させるために、本明細書で説明したタイプの閉鎖駆動システムが用いられ得る。閉鎖管はまた、上記で説明した方式で、二重枢動構成によって閉鎖管に枢動的に取り付けられ得るエンドエフェクタ閉鎖スリーブ7572に取り付けられ得る。上記で説明したように、例えば、閉鎖管の軸方向移動は、閉鎖トリガの作動を通じて制御され得る。他の構成では、閉鎖管は、ロボット制御システムなどによって軸方向に移動され得る。図80、81、83及び84で分かるように、エンドエフェクタ閉鎖スリーブ7572は、エンドエフェクタ装着アセンブリ7430、並びに第2の顎部7440の細長チャネル7442の近位端部分7444に被さって延びている。エンドエフェクタ閉鎖スリーブ7572は、第2の顎部7440又は細長チャネル7442の近位端部分7444と動作可能に係合するように構成された、直径方向に対向する2つの開放部材7574を含む。図示の実施形態では、開放部材7574は、エンドエフェクタ閉鎖スリーブ7572の各部分に形成された内向き延出開放タブ7576を備えている。
The
第2の顎部7440は、エンドエフェクタ閉鎖スリーブ7572を遠位方向「DD」に前進させることによって、閉鎖位置(図81及び83)に移動される。エンドエフェクタ閉鎖スリーブ7572が遠位側に移動するとき、その遠位端部7575は、細長チャネル7442の近位端部7444上に形成された閉鎖ランプセグメント7447と接触し、細長チャネル7442をアンビル7412に向かってカム駆動するように働く。エンドエフェクタ閉鎖スリーブ7552がその最遠位位置に移動されると、遠位端部7575は、細長チャネル7442上の当接表面7443と接触して、細長チャネル7442にかかる閉鎖荷重又は閉鎖力を維持する。図81及び83を参照されたい。エンドエフェクタ閉鎖スリーブ7572が完全閉鎖位置にあるとき、開放タブ7576の端部は、対応する側方陥凹エリア7448内に受容される。第2の顎部7440又は細長チャネル7442を開放位置に移動させるために、閉鎖システムは閉鎖スリーブ7572を近位方向「PD」に移動させるように作動される。エンドエフェクタ閉鎖スリーブ7572が近位側に移動するとき、開放タブ7572は、細長チャネル7442の近位端部7444上の対応する開放ランプ又はカム7449に乗り上げて、細長チャネル7442をアンビル7412から離してカム駆動するか又は枢動させる。各タブは、上部表面7580の上へとカム7449に乗り上げ、細長チャネル7442をその完全開放位置に確実に保持するように働く。図84を参照されたい。
The
図85〜87は、シャフト軸線SA−SAに対して開放位置と閉鎖位置との間で同時に移動可能である2つの顎部8410、8440を備える別の外科用エンドエフェクタ8400を示している。図示の例では、第1の顎部8410はアンビル8412を備えている。図示のアンビル8412はアンビル本体8414を有し、アンビル本体8414は、エンドエフェクタアダプタ8600と移動可能にインターフェースする近位端部分8416を有している。図85で分かるように、エンドエフェクタアダプタ8600は、各々がそれらから側方に突出する側方枢動ピン8604を有する2つの遠位突出遠位壁8602を含んでいる。各側方枢動ピン8604は、アンビル8412の近位端部分8416の外側壁8417に形成された対応する開放型U字形状スロット8418内に受容される。図85を参照されたい。そのような構成により、細長チャネル8412はエンドエフェクタアダプタ8600に対して移動又は枢動することが可能となる。図85で更に分かるように、エンドエフェクタアダプタ8600は、エンドエフェクタ装着アセンブリ8430に移動不能に取り付けられる。例えば、エンドエフェクタアダプタ8600は、各々が装着ホール8608を中に有する2つの直立外側壁8606を更に含む。エンドエフェクタ装着アセンブリ8430は、直立外側壁8606の間に受容され、その直立外側壁8606を通じてホール8508へと延びるスプリングピン8421によって、直立外側壁8606に移動不能に取り付けられる。エフェクタ装着アセンブリ8430は、例えば、エンドエフェクタ装着アセンブリ8430の装着ホール8432内に回転可能に受容されるように構成された枢動ピンを含む遠位シャフトフレームに枢動的に装着されるように適合されている。外科用エンドエフェクタ8400は、本発明の趣旨及び範囲から逸脱することなく、上記で説明したタイプの関節ロック並びに第1及び第2の関節ロッド構成によって、あるいは、本明細書で説明した様々な関節運動システム並びに関節ロッド及び/又はロッド/ケーブル構成によって関節運動され得る。同様に図85で分かるように、アンビル本体8414はまた、各側部に形成された2つのステープル成形表面8424を有する細長スロット8422を含んでいる。
FIGS. 85-87 show another
外科用エンドエフェクタ8400は、細長チャネル8442を備える第2の顎部8440を更に含み、この細長チャネル8442は、外科用ステープルカートリッジ8450を支持するように構成されている。上記で説明した様々な外科用ステープルカートリッジと同様に、外科用ステープルカートリッジ8450は、その中に複数のステープルドライバ(図示せず)を動作可能に支持するように構成されており、ステープルドライバはその上で外科用ステープル(図示せず)を動作可能に支持する。ステープルドライバは、外科用ステープルカートリッジ8450内に形成された対応するドライバポケット8452内に移動可能に支持される。ステープルドライバは、それを通じた発射部材8460の軸方向通路に適応するように、外科用ステープルカートリッジ8450の細長スロット8454の各側部に列をなして配列されている。外科用エンドエフェクタ8400が様々な方向に操作されるときに、ステープルドライバがそれぞれのドライバポケット8452から外れるのを防止するために、カートリッジパン8451がステープルカートリッジ8450に取り付けられる。ウェッジスレッド8462が外科用ステープルカートリッジ8450内で移動可能に支持されており、発射部材8460が外科用ステープルカートリッジ8450の近位端部に隣接する開始位置から外科用ステープルカートリッジ8450の遠位端部内の終了位置へと駆動されるときに、発射部材8460によって駆動的に係合されるように構成されている。上記で説明したように、ウェッジスレッド8462が外科用ステープルカートリッジ8450を通じて遠位方向に駆動されるとき、ウェッジスレッド8462はステープルドライバと駆動的に接触して、それらをカートリッジデッキ表面(図示せず)に向かって駆動する。発射部材8460は組織切断表面8464を含み、組織切断表面8464は、発射部材8460が遠位側に駆動されるときに、顎部8410、8440の間にクランプされた組織を切断するように働くものである。本明細書で説明した様々な他のタイプの遠位発射ビーム280が、発射部材8460並びに中間発射シャフト部分2222又は他の発射システム構成に動作可能に取り付けられる。遠位発射ビーム280を駆動及び後退させるための中間発射シャフト部分2222の動作については、上記で詳細に説明されており、簡潔にするために繰り返されない。本発明の趣旨及び範囲から逸脱することなく、発射部材に動力供給するために、他の発射ビーム及び発射システム構成(モータ駆動式並びに手動駆動式)がまた用いられ得る。組立ての目的だけでなく、発射部材8460の動作を妨害又は干渉し得る、第1及び第2の顎部への組織及び/又は体液の侵入を防止するために、第1の顎部カバー8415がアンビル8412に着脱可能に取り付けられ、第2の顎部カバー8441が第2の顎部8440に着脱可能に取り付けられる。
The
図85で分かるように、細長チャネル8442は、2つの外側壁8445を有する近位端部分8444を含んでいる。各外側部分8445は、その中に対応するU字形状の又は開放型のスロット8446を有し、そのスロット8446は、エンドエフェクタアダプタ8600から側方に突出する対応する側方枢動ピン8604を受容するように適合されている。そのような構成は、第1の顎部8410又はアンビル8412に対して第2の顎部8440又は細長チャネル8442を移動可能に又は枢動的に軸支するように働く。同様に図85で分かるように、閉鎖ランプセグメント8447が細長チャネル8442の近位端部8444上に形成されている。加えて、近位端部分8444の各外側部8445は、その中に第2の側方陥凹エリア8448を形成されている。各第2の側方陥凹エリア8448は、対応する第2の閉鎖ランプセグメント8447の近位側に配置されている。第2の開放ランプ又はカム8449が、各第2の側方陥凹エリア8448の近位端部に隣接して形成されている。各第2の開放ランプ又はカム8449は、第2の上部表面8450において終端している。同様に、第1の陥凹エリア8420がアンビル8412の近位端部分8416の側壁8417の各々の底部に形成されている。第1の開放ランプ又はカム8426が、各第1の側方陥凹エリア8420の近位端部に隣接して形成されている。各第1の開放ランプ又はカム8426は、第1の上部表面8428において終端している。
As can be seen in FIG. 85, the
第2の顎部8440又は細長チャネル8442と第1の顎部8410又はアンビル8412は、本明細書で開示する様々なタイプの閉鎖システムによって開放位置と閉鎖位置との間で同時に移動され得る。例えば、本明細書で説明した方式で閉鎖管260を作動させるために、閉鎖駆動システム30が用いられ得る。閉鎖管260はまた、上記で説明した方式で二重枢動構成によって閉鎖管260に枢動的に取り付けられ得るエンドエフェクタ閉鎖スリーブ8572に取り付けられ得る。上記で説明したように、例えば、閉鎖管260の軸方向移動は、閉鎖トリガ32の作動を通じて制御され得る。他の構成では、閉鎖管は、ロボット制御システムなどによって軸方向に移動され得る。図86及び87で分かるように、エンドエフェクタ閉鎖スリーブ8572は、エンドエフェクタ装着アセンブリ8430、エンドエフェクタアダプタ8600、並びに第2の顎部8440の細長チャネル8442の近位端部分8444及び第1の顎部8410又はアンビル8412の近位端部分8416に被さって延びている。エンドエフェクタ閉鎖スリーブ8572は、第1の顎部8410の近位端部分8416と動作可能に係合するように構成された、直径方向に対向する2つの第1の開放部材8574を含む。図示の実施形態では、第1の開放部材8574は、エンドエフェクタ閉鎖スリーブ8572の各部分に形成された、第1の内向き延出開放タブ8576を備える。同様に、エンドエフェクタ閉鎖スリーブ8572は、第2の顎部8440の近位端部分8444と動作可能に係合するように構成された、直径方向に対向する2つの第2の開放部材8580を更に含む。図示の実施形態では、第2の開放部材8580は、エンドエフェクタ閉鎖スリーブ8572の各部分に形成された、第2の内向き延出開放タブ8582を備える。
The
第1の顎部8410と第2の顎部8440は、エンドエフェクタ閉鎖スリーブ8572を遠位方向「DD」に前進させることによって、閉鎖位置(図86)に同時に移動される。エンドエフェクタ閉鎖スリーブ8572が遠位側に移動するとき、その遠位端部8575は、第1の顎部8410又はアンビル8412の近位端部8416の底部、並びに細長チャネル8442の近位端部8444上に形成された閉鎖ランプセグメント8447と接触し、第1及び第2の顎部8410、8440を互いに向かってカム駆動するように働く。エンドエフェクタ閉鎖スリーブ8572がその最遠位位置に移動されると、エンドエフェクタ閉鎖スリーブ8572の遠位端部8575は、第1の顎部8410又はアンビル8412上の第1の当接表面8419、並びに第2の顎部8440又は細長チャネル8442上の第2の当接表面8443と接触して、顎部8410、8440の双方にかかる閉鎖荷重又は閉鎖力を維持する。図86を参照されたい。エンドエフェクタ閉鎖スリーブ8572がその完全閉鎖位置にあるとき、第1の開放タブ8576の端部は、対応する第1の側方陥凹エリア8420内に受容され、第2の開放タブ8582の端部は、対応する第2の側方陥凹エリア8448内に受容される。第1及び第2の顎部8410、8440を互いから離して開放位置へと移動させるために、閉鎖システムは閉鎖スリーブ8572を近位方向「PD」に移動させるように作動される。エンドエフェクタ閉鎖スリーブ8572が近位側に移動するとき、第1の開放タブ8576は第1の顎部8410の近位端部分8416の底部の対応する第1の開放ランプ又はカム8426に乗り上げて、第1の顎部8410又はアンビル8412を第2の顎部8440又は細長チャネル8442から離れる方向にカム駆動するか又は枢動させ、第2の開放タブ8582は、細長チャネル8442の近位端部分8444上の対応する第2のランプ8449に乗り上げて、細長チャネル8442を第1の顎部又はアンビル8412から離れる方向にカム駆動するか又は枢動させる。第1のタブ8576の各々は、対応する第1のロック表面8428の上へと対応するカム又はランプ8426に乗り上げ、第2のタブ8582の各々は、対応する第2のロック表面8450の上へと対応する第2のカム又はランプ8449に乗り上げ、それによって第1及び第2の顎部8410、8400は開放位置に保持される。第2のタブ8582に対する第1のタブ8576の軸方向位置は、第1及び第2の顎部を互いから離して同時に移動させるように配置されてもよく、あるいは、第1及び第2の顎部は、顎部の一方が他方の顎部が移動する前に移動するように、軸方向に食違いにされてもよいことが、読者には諒解されよう。
The
図88〜93は、細長シャフトアセンブリ9200と動作可能にインターフェースする外科用エンドエフェクタ9300を含む別の外科用器具9010の各部分を示している。外科用エンドエフェクタ9300は、上記で詳細に説明した外科用エンドエフェクタ300と類似しており、外科用ステープルカートリッジ304を中に動作可能に支持するように構成された細長チャネル9302の形態をなす第1の顎部を含む。図示の外科用エンドエフェクタ9300は、細長チャネル9302上でそれに対して移動するように支持されるアンビル310の形態をなす第2の顎部を更に含む。アンビル310は、上記で説明し図88及び91に示した閉鎖システムによって移動可能に作動され得る。例えば、本明細書で説明した方式で閉鎖管260を作動させるために、第1の閉鎖駆動システムが用いられ得る。閉鎖管260は、上記で説明した方式で、二重枢動閉鎖スリーブアセンブリ271によって閉鎖管260に枢動的に取り付けられるエンドエフェクタ閉鎖スリーブ272に取り付けられている。上記で説明したように、例えば、閉鎖管260の軸方向移動は、閉鎖トリガの作動を通じて制御され得る。同様に上記で説明したように、閉鎖スリーブ272は、アンビル310を開放位置へ移動可能に作動するように働く開放カムを含む。使用の際、閉鎖管260は、例えば、閉鎖トリガの作動に反応して、アンビル310を閉鎖するように遠位側(方向「DD」)に並進される。アンビル310は、閉鎖管260を遠位方向「DD」に、加えてそれに枢動的に結合されたエンドエフェクタ閉鎖スリーブ272を遠位側に並進させることによって閉鎖される。エンドエフェクタ閉鎖スリーブ272が遠位側に駆動されるとき、開放カム354のカムタブ358は、アンビル310のカムスロット318内で遠位側に移動して、カム表面319と動作可能にインターフェースするか又はカム表面319に乗り上げ、アンビル310の本体部分312を外科用ステープルカートリッジ304から離して開放位置へとカム駆動する。アンビル310は、エンドエフェクタ閉鎖スリーブ272の遠位端部275がアンビル取付けアーム316に乗り上げて接触するまで、閉鎖管260を遠位方向「DD」に遠位側に並進させることによって閉鎖され、それによって、カムタブ358は、カム表面319上のカムスロット318内で近位方向「PD」に移動して、アンビル310を開放位置へと枢動させることになる。
FIGS. 88-93 show each part of another
図91で分かるように、例えば、細長シャフトアセンブリ9200は、閉鎖管アセンブリ260がその上で受容される二分割シャフトフレーム又はスパインアセンブリ9812を含んでいる。スパインアセンブリ9812は、近位スパイン部分9814と遠位スパイン部分9816とを含む。近位スパイン部分9816は、シャフト軸線SAを中心とした外科用エンドエフェクタ9300の回転を促進するように、本明細書で説明した様々な方式でハンドル又はハウジング(図示せず)内で回転可能に軸支され得る。図示されていないが、外科用器具9010はまた、上記で説明した様々な方式で外科用ステープルカートリッジを通じて発射部材を駆動するために、発射ビーム構成と、本明細書で開示される様々な発射駆動システム構成のうちのいずれかとを有し得る。図91で分かるように、遠位スパイン部分9816は、上向き突出枢動ピン9819をその上に有する遠位端部分9818を含み、この上向き突出枢動ピン9819は、細長チャネル9302の近位端部分9320に形成された枢動ホール9328内に枢動的に受容されるように適合されている。かかる構成により、枢動ホール9328によって規定される関節運動軸線B−Bを中心としたスパインアセンブリ9812に対する外科用エンドエフェクタ9300の細長チャネル9302の枢動的移動が促進される。上記に示すように、関節運動軸線B−Bは、細長シャフトアセンブリ9200によって規定されるシャフト軸線SA−SAを横切っている。
As can be seen in FIG. 91, for example, the
依然として図91を参照すると、細長シャフトアセンブリ9200は、全体として9900で示される関節運動システムを更に含み、この関節運動システムは、第1の関節バー9910と第2の関節バー9920とを含んでいる。第1の関節バー9910は、外科用器具ハンドル若しくはハウジング又はロボット制御システムの一部分内に動作可能に支持された第1の関節モータ9912と動作可能にインターフェースする。図92及び93で分かるように、第1の関節バー9910は、第1の関節モータ9912の第1のねじ付き駆動シャフト9916上でねじ式で受容される第1の関節ナット9914に取り付けられている。第1の回転方向における第1のねじ付き駆動シャフト9916の回転は結果として、遠位方向「DD」における第1の関節バー9910の遠位前進を生じることになり、第2の又は反対の回転方向における第1のねじ付き駆動シャフト9916の回転は結果として、近位方向「PD」における第1の関節駆動バー9910の近位前進を生じることになる。
Still referring to FIG. 91, the
図示の関節運動システム9900は、外科用器具ハンドル若しくはハウジング又はロボット制御システムの一部分内に動作可能に支持された第2の関節モータ9922と動作可能にインターフェースする第2の関節バー9920を更に含む。図92及び93で分かるように、第2の関節バー9920は、第2の関節モータ9922の第2のねじ付き駆動シャフト9926上でねじ式で受容される第2の関節ナット9924に取り付けられている。第1の回転方向における第2のねじ付き駆動シャフト9926の回転は結果として、近位方向「PD」における第2の関節バー9920の近位前進を生じることになり、第2の又は反対の回転方向における第2のねじ付き駆動シャフト9926の回転は結果として、遠位方向「DD」における第2の関節駆動バー9920の遠位前進を生じることになる。
The illustrated
関節運動システム9900は、第1及び第2の関節バー9910、9920に動作可能に取り付けられるクロスリンケージアセンブリ9940を更に含む。図91で分かるように、クロスリンケージアセンブリ9940は、第1のピン9952で細長チャネル9302の近位端部9320に枢動的にピン留めされる中央支持部材9950を含んでいる。中央支持部材9950は近位コネクタタブ9954を更に含み、近位コネクタタブ9954は、近位コネクタタブ9954を遠位スパイン部分9816の遠位端部分9818に枢動的に取り付けるために、第2のピン9958を中に受容するためのスロット9956を含む。このピン及びスロットの構成は、スパインアセンブリ9812に対する中央支持部材9950の枢動的及び軸方向移動を促進する。中央支持部材9950は、それを通じて発射ビームを受容するためのスロット9960を更に含む。中央支持部材9950は、発射ビームが外科用エンドエフェクタ9300の関節運動に適応するように屈曲するとき、発射ビームに側方支持をもたらすように働く。
The
図92及び93に最も具体的に示されるように、中央支持部材9950は、第1及び第2の関節バー9910、9920の取付けを促進する近位リンケージタブ部分9970を有している。具体的に言えば、第1の関節バー9910の遠位端部9911が、近位リンケージタブ部分9970に枢動的にピン留めされる第1の関節リンク9972に枢動的に取り付けられる。同様に、第2の関節バー9920の遠位端部9921が、中央支持部材9950の近位リンケージタブ部分9970に枢動的にピン留めされる第2の関節リンク9974に枢動的に取り付けられる。図92は、矢印9980によって表される方向における外科用エンドエフェクタ9300の関節運動を示している。この図で分かるように、第1の関節モータの第1のねじ付き駆動シャフト9916は、第1の回転方向に回転されて第1の関節バー9910を遠位方向に駆動する。加えて、第2の関節モータ9922の第2のねじ付き駆動シャフト9926は、第2の回転方向に回転されて第2の関節バー9920を近位方向に引き込む。第1及び第2の関節モータ9912、9922は、コンピュータ制御システムによって操作され、また、図92で分かるように、第1の関節バー9910が遠位方向に移動する距離は、第2の関節バー9920が近位方向に移動する距離に等しくない。
As most specifically shown in FIGS. 92 and 93, the
図93は、矢印9982によって表される方向における外科用エンドエフェクタ9300の関節運動を示している。この図で分かるように、第2の関節モータ9922の第2のねじ付き駆動シャフト9926は、第1の回転方向に回転されて第2の関節バー9920を遠位方向に駆動する。加えて、第1の関節モータ9912の第1のねじ付き駆動シャフト9916は、第2の回転方向に回転されて第1の関節バー9910を近位方向に引き込む。第1及び第2の関節モータ9912、9922は、コンピュータ制御システムによって操作され、また、図92で分かるように、第2の関節バー9920が遠位方向に移動する距離は、第1の関節バー9910が近位方向に移動する距離に等しくない。代替的な構成では、1つの関節モータのみがエンドエフェクタを関節運動させるために用いられてもよい。そのような構成では、例えば、第2のリンクは、本明細書で詳細に開示されるラックアンドピニオン構成に類似したラックアンドピニオン構成によって、第1のリンクに近位側で結合され得る。
FIG. 93 shows the joint movement of the
図94及び95は、ライト部材9305を各々が有する外科用ステープルカートリッジ9304及び9304’を示しており、ライト部材9305は、それが支持されている外科用エンドエフェクタの遠位端部を照明するためのものである。ステープルカートリッジ9304、9304’の各々は、器具ハンドル又はハウジング内に配置された電気エネルギー源と通信する、細長チャネル内の対応する導体と電気的に接触するように構成されたカートリッジの底部又はカートリッジ側部に装置された導体(図示せず)を有してもよい。したがって、カートリッジ9304、9304’が外科用エンドエフェクタの細長チャネル内に適切に着座されているとき、その中のライト9305は、対応する導体を通じて、ハンドル又はハウジング内の電力源から電力を受容し得る。
FIGS. 94 and 95 show surgical
本明細書で説明した外科用器具システムは、電気モータにより動作するが、本明細書で説明した外科用器具システムは、任意の好適な方式で動作することができる。様々な例において、本明細書で説明した外科用器具システムは、例えば、手動操作トリガにより動作することができる。モータは、ロボット制御システムの一部分を備えてもよい。 Although the surgical instrument system described herein is operated by an electric motor, the surgical instrument system described herein can operate in any suitable manner. In various examples, the surgical instrument system described herein can be operated, for example, by a manually operated trigger. The motor may include a portion of the robot control system.
本明細書で説明した外科用器具システムは、ステープルの配備及び変形と関連させて説明されているが、本明細書で説明した実施形態は、これに限定されない。ステープル以外の締結具、例えばクランプ又はタックなどを配備する、様々な実施形態も想到される。更に、組織を封止するための任意の好適な手段を利用する、様々な実施形態も想到される。例えば、様々な実施形態によるエンドエフェクタは、組織を加熱して封止するように構成された電極を備え得る。また例えば、特定の実施形態によるエンドエフェクタは、組織を封止するために振動エネルギーを印加することができる。 The surgical instrument system described herein has been described in connection with the deployment and deformation of staples, but the embodiments described herein are not limited thereto. Various embodiments are also conceivable in which fasteners other than staples, such as clamps or tacks, are deployed. In addition, various embodiments have been conceived that utilize any suitable means for sealing the tissue. For example, end effectors according to various embodiments may include electrodes configured to heat and seal the tissue. Also, for example, the end effector according to a particular embodiment can apply vibrational energy to seal the tissue.
本明細書で説明した外科用器具システムは、1つ又は2つ以上の電気モータにより動作するが、本明細書で説明した外科用器具システムは、任意の好適な方式で動作することができる。様々な例において、本明細書で説明した外科用器具システムは、例えば、手動操作トリガにより動作することができる。 While the surgical instrument system described herein is operated by one or more electric motors, the surgical instrument system described herein can operate in any suitable manner. In various examples, the surgical instrument system described herein can be operated, for example, by a manually operated trigger.
実施例1−外科用エンドエフェクタを備える、外科用器具。外科用エンドエフェクタは、第1の顎部と、第1の顎部に対して開放位置と閉鎖位置との間で移動可能に支持される第の2顎部と、を備える。外科用器具は、閉鎖及び開放モーションが加えられたことに反応して軸方向に移動可能である閉鎖部材を更に備える。閉鎖部材は、それから突出して第2の顎部上の対応するスロット付きカム表面と移動可能に係合する少なくとも1つの開放カムを備え、それにより、開放モーションが閉鎖部材に加えられると、その少なくとも1つの開放カムは対応するスロット付きカム表面と移動可能に係合して第2の顎部を開放位置に移動させ、閉鎖モーションが閉鎖部材に加えられると、閉鎖部材は第2の顎部と係合して第2の顎部を閉鎖位置のうちの1つに移動させる。 Example 1-A surgical instrument comprising a surgical end effector. The surgical end effector comprises a first jaw and a second jaw that is movably supported between an open position and a closed position with respect to the first jaw. Surgical instruments further include a closing member that is axially movable in response to the closing and opening motion being applied. The closing member comprises at least one opening cam that projects from it and movably engages with the corresponding slotted cam surface on the second jaw, thereby at least when an opening motion is applied to the closing member. One open cam movably engages with the corresponding slotted cam surface to move the second jaw to the open position, and when a closing motion is applied to the closing member, the closing member becomes with the second jaw. Engage and move the second jaw to one of the closed positions.
実施例2−少なくとも1つの開放カムは、閉鎖部材から内向きに側方に延び、対応するスロット付きカム表面のうちの第1の第1のスロット付きカム表面と係合する第1の開放カムを備える、実施例1の外科用器具。第2の開放カムが閉鎖部材から内向きに側方に延び、対応するスロット付きカム表面のうちの第2のスロット付きカム表面と係合する。 Example 2-A first open cam that extends inwardly laterally from the closing member and engages with a first first slotted cam surface of the corresponding slotted cam surfaces. The surgical instrument of Example 1. A second open cam extends inwardly laterally from the closing member and engages with a second slotted cam surface of the corresponding slotted cam surfaces.
実施例3−第2の開放カムは、閉鎖部材上の第1の開放カムから直径方向に反対側にある、実施例2の外科用器具。 Example 3-The second open cam is a surgical instrument of Example 2 that is diametrically opposite the first open cam on the closing member.
実施例4−少なくとも1つの開放カムは、閉鎖部材に着脱可能に取り付けられている、実施例1、2又は3の外科用器具。 Example 4-The surgical instrument of Example 1, 2 or 3, wherein at least one open cam is detachably attached to a closing member.
実施例5−少なくとも1つの開放カムは、閉鎖部材とスナップ係合するように構成されている、実施例1、2、3又は4の外科用器具。 Example 5-The surgical instrument of Example 1, 2, 3 or 4, wherein at least one open cam is configured to snap engage with the closing member.
実施例6−少なくとも1つの開放カムは、閉鎖部材内に一体的に形成されている、実施例1、2又は3の外科用器具。 Example 6-The surgical instrument of Example 1, 2 or 3 in which at least one open cam is integrally formed within the closing member.
実施例7−少なくとも1つの開放カムは、閉鎖部材の壁の中に折り曲げられ、それにより、壁の折り曲げられた部分が第1の顎部の対応する部分を通じて延びて、第2の顎部上の対応するスロット付きカム表面と移動可能に係合する、実施例1、2、3又は6の外科用器具。 Example 7-At least one open cam is bent into the wall of the closing member, whereby the bent portion of the wall extends through the corresponding portion of the first jaw and is on the second jaw. The surgical instrument of Example 1, 2, 3 or 6 that movably engages with the corresponding slotted cam surface of the.
実施例8−少なくとも1つの開放カムは、対応するスロット付きカム表面と係合するように、第1の顎部の一部分を通じて内向きに延びる、実施例1、2、3、4、5、6又は7の外科用器具。 Example 8-At least one open cam extends inwardly through a portion of the first jaw to engage the corresponding slotted cam surface, Examples 1, 2, 3, 4, 5, 6 Or 7 surgical instruments.
実施例9−第2の顎部は、第1の顎部に対する第2の顎部の枢動移動を促進するために、第1の顎部の対応するトラニオンホール内に枢動的に受容されるように構成された、一対の側方に延びるトラニオンを備える、実施例1、2、3、4、5、6、7又は8の外科用器具。 Example 9-The second jaw is pivotally received within the corresponding trunnion hole of the first jaw to facilitate the pivotal movement of the second jaw with respect to the first jaw. The surgical instrument of Example 1, 2, 3, 4, 5, 6, 7 or 8, comprising a pair of laterally extending trunnions configured to
実施例10−第1の顎部は、外科用ステープルカートリッジを動作可能に支持するように構成され、第2の顎部はアンビルを備える、実施例1、2、3、4、5、6、7、8又は9の外科用器具。 Example 10-The first jaw is configured to operably support a surgical staple cartridge and the second jaw comprises an anvil, Examples 1, 2, 3, 4, 5, 6, 7, 8 or 9 surgical instruments.
実施例11−外科用エンドエフェクタを備える、外科用器具。外科用エンドエフェクタは、第1の顎部と、第1の顎部に対して開放位置と閉鎖位置との間で選択的に移動するように第1の顎部上で枢動的に支持される第の2顎部と、を備える。第2の顎部は、第1及び第2のカム表面を備える。外科用器具はエンドエフェクタ閉鎖スリーブを更に備え、エンドエフェクタ閉鎖スリーブは、第1のカム表面と動作可能に係合するように、第1の顎部の一部分を通じてエンドエフェクタ閉鎖スリーブから内向きに側方に延びる第1の開放カムを備える。第2の開放カムが、第2のカム表面と動作可能に係合するように、第1の顎部の別の一部分を通じてエンドエフェクタ閉鎖スリーブから内向きに側方に延び、それにより、開放モーションがエンドエフェクタ閉鎖スリーブに加えられると、第1の開放カムは第1のカム表面と移動可能に係合し、第2の開放カムは第2のカム表面と移動可能に係合して第2の顎部を開放位置に移動させ、また、閉鎖モーションがエンドエフェクタ閉鎖スリーブに加えられると、エンドエフェクタ閉鎖スリーブは第2の顎部と移動可能に係合して第2の顎部を閉鎖位置のうちの1つに移動させる。 Example 11-A surgical instrument comprising a surgical end effector. The surgical end effector is pivotally supported on the first jaw and on the first jaw to selectively move between the open and closed positions with respect to the first jaw. It is provided with a second jaw portion. The second jaw comprises the first and second cam surfaces. Surgical instruments further include an end effector closure sleeve, which side inwardly from the end effector closure sleeve through a portion of the first jaw so that it operably engages with the first cam surface. It has a first open cam that extends in the direction. The second open cam extends inwardly laterally from the end effector closure sleeve through another portion of the first jaw so that it operably engages the surface of the second cam, thereby opening motion. Is movably engaged with the surface of the first cam and the second open cam is movably engaged with the surface of the second cam when is added to the end effector closure sleeve. When the jaw is moved to the open position and a closing motion is applied to the end effector closing sleeve, the end effector closing sleeve movably engages with the second jaw to close the second jaw. Move to one of them.
実施例12−第1及び第2の開放カムは、エンドエフェクタ閉鎖スリーブに着脱可能に取り付けられている、実施例11の外科用器具。 Example 12-The surgical instrument of Example 11 in which the first and second open cams are detachably attached to an end effector closure sleeve.
実施例13−第1及び第2の開放カムは、エンドエフェクタ閉鎖スリーブに永久変形部を備える、実施例11の外科用器具。 Example 13-The first and second open cams are surgical instruments of Example 11, wherein the end effector closure sleeve is provided with a permanent deformity.
実施例14−第1及び第2の開放カムは、エンドエフェクタ閉鎖スリーブを折り曲げることによって形成されている、実施例11又は13の外科用器具。 Example 14-The surgical instrument of Example 11 or 13, wherein the first and second open cams are formed by bending the end effector closure sleeve.
実施例15−第1及び第2の開放カムは、エンドエフェクタ閉鎖スリーブの外側表面の隣接する部分に対して90度の角度で折り曲げられている、実施例14の外科用器具。 Example 15-The surgical instrument of Example 14 in which the first and second open cams are bent at a 90 degree angle to the adjacent portion of the outer surface of the end effector closure sleeve.
実施例16−第1の開放カムは、第2の顎部の第1のカム表面と動作可能にインターフェースするように、第1の顎部の第1のスロットを通じて移動可能に突出し、第2の開放カムは、第2の顎部の第2のカム表面と動作可能にインターフェースするように、第1の顎部の第2のスロットを通じて移動可能に突出する、実施例11、12、13、14又は15の外科用器具。 Example 16-The first open cam movably projects through the first slot of the first jaw so as to operably interface with the surface of the first cam of the second jaw, the second. Examples 11, 12, 13, 14 the open cam movably projects through a second slot in the first jaw so as to operably interface with the second cam surface of the second jaw. Or 15 surgical instruments.
実施例17−第2の顎部は、第1の顎部に対する第2の顎部の枢動移動を促進するために、第1の顎部の対応するトラニオンホール内に枢動的に受容されるように構成された、一対の側方に延びるトラニオンを備える、実施例11、12、12、13、14、15又は16の外科用器具。 Example 17-The second jaw is pivotally received within the corresponding trunnion hole of the first jaw to facilitate the pivotal movement of the second jaw with respect to the first jaw. A surgical instrument according to Example 11, 12, 12, 13, 14, 15 or 16, comprising a pair of laterally extending trunnions configured to.
実施例18−第1の顎部は、外科用ステープルカートリッジを動作可能に支持するように構成され、第2の顎部はアンビルを備える、実施例11、12、13、14、15、16又は17の外科用器具。 Example 18-1 The first jaw is configured to operably support a surgical staple cartridge and the second jaw comprises an anvil, Examples 11, 12, 13, 14, 15, 16 or 17 surgical instruments.
実施例19−ハウジングと、そのハウジングによって動作可能に支持され、閉鎖及び開放モーションを発生させるように構成された閉鎖システムと、を備える、外科用器具。細長シャフトアセンブリがハウジングと動作可能にインターフェースする。細長シャフトアセンブリは、閉鎖及び開放モーションが加えられたことに反応して軸方向に移動可能であるエンドエフェクタ閉鎖スリーブを備える。外科用器具は、細長チャネルを備える外科用エンドエフェクタを更に備え、細長チャネルは、細長シャフトアセンブリと動作可能にインターフェースし、外科用ステープルカートリッジを中に動作可能に支持するように構成されている。開放位置と閉鎖位置との間で細長チャネルに対して選択的に移動するように、アンビルが細長チャネル上で移動可能に支持されている。外科用器具はまた、エンドエフェクタ閉鎖スリーブから突出する少なくとも2つの開放カムを備え、それにより、開放モーションがエンドエフェクタ閉鎖スリーブに加えられると、少なくとも2つの開放カムは、第1の方向においてアンビル上の対応するカム表面と動作可能にインターフェースしてアンビルを開放位置に移動させ、閉鎖モーションがエンドエフェクタ閉鎖スリーブに加えられると、エンドエフェクタ閉鎖スリーブは、第2の方向においてアンビルと動作可能にインターフェースして、アンビルを閉鎖位置のうちの1つに移動させる。 Example 19-A surgical instrument comprising a housing and a closure system operably supported by the housing and configured to generate closure and opening motions. The elongated shaft assembly operably interfaces with the housing. The elongated shaft assembly includes an end effector closure sleeve that is axially movable in response to the application of closure and opening motions. The surgical instrument further comprises a surgical end effector with an elongated channel, which is configured to operably interface with the elongated shaft assembly and operably support the surgical staple cartridge inside. Anvils are movably supported on the elongated channels so that they move selectively with respect to the elongated channels between the open and closed positions. Surgical instruments also include at least two open cams protruding from the end effector closure sleeve, so that when an open motion is applied to the end effector closure sleeve, at least two open cams are on the anvil in the first direction. The end effector closure sleeve operably interfaces with the anvil in the second direction when the closure motion is applied to the end effector closure sleeve by operably interfacing with the corresponding cam surface of the anvil to the open position. And move the anvil to one of the closed positions.
実施例20−少なくとも1つの開放カムは、エンドエフェクタ閉鎖スリーブに形成されている、実施例19の外科用器具。 Example 20-The surgical instrument of Example 19 in which at least one open cam is formed on the end effector closure sleeve.
実施例21−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。エンドエフェクタ装着アセンブリが、シャフト軸線を横断する関節運動軸線を中心として選択的に関節運動するように細長シャフトアセンブリに移動可能に結合されている。第1及び第2の顎部が各々、互いに対してまたシャフト軸線に対して、共通の枢動軸線を中心として開放位置と閉鎖位置との間で移動可能となるように、第1及び第2の顎部がエンドエフェクタ装着アセンブリに移動可能に結合されている。第1の顎部は第1の点を備え、第2の顎部は第2の点を備え、その第1及び第2の点は、シャフト軸線に対して垂直である共通の軸線に沿って位置する。第1の点は、第1の顎部が開放位置にあるときのシャフト軸線からの第1の距離であり、第2の点は、第2の顎部が開放位置にあるときのシャフト軸線からの第2の距離であり、第2の距離は第1の距離とは異なる。外科用器具は、開放位置へと第1及び第2の顎部を互いから離して第1及び第2の顎部を付勢するための手段と、閉鎖位置へと互いに向かって第1及び第2の顎部を移動させるように第1及び第2の顎部に閉鎖モーションを加えるための手段と、を更に備える。 Example 21-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The end effector mounting assembly is movably coupled to the elongated shaft assembly for selective joint motion about the joint motion axis across the shaft axis. The first and second jaws are movable between the open and closed positions about a common pivot axis, respectively, with respect to each other and with respect to the shaft axis, respectively. Jaw is movably coupled to the end effector mounting assembly. The first jaw comprises a first point, the second jaw comprises a second point, the first and second points of which are along a common axis perpendicular to the shaft axis. To position. The first point is the first distance from the shaft axis when the first jaw is in the open position, and the second point is from the shaft axis when the second jaw is in the open position. The second distance is different from the first distance. Surgical instruments are a means for urging the first and second jaws away from each other to the open position and the first and second jaws towards the closed position. Further provided are means for applying a closing motion to the first and second jaws so as to move the second jaw.
実施例22−第1の顎部及び第2の顎部の一方は、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備え、第1の顎部及び第2の顎部のもう一方はアンビルを備える、実施例21の外科用器具。 Example 22-One of the first jaw and the second jaw comprises an elongated channel configured to operably support a surgical staple cartridge therein, the first jaw and the second jaw. The surgical instrument of Example 21 comprising an anvil on the other side of the jaw.
実施例23−第1の顎部は外科用ステープルカートリッジを備え、第2の顎部はアンビルを備え、第2の距離は第1の距離よりも長い、実施例21の外科用器具。 Example 23-1 The surgical instrument of Example 21, wherein the first jaw comprises a surgical staple cartridge, the second jaw comprises an anvil, and the second distance is longer than the first distance.
実施例24−第1及び第2の顎部が閉鎖位置のうちの1つにあるときに、第1の顎部と第2の顎部との間で軸方向に移動するように支持される発射部材を更に備える、実施例21、22又は23の外科用器具。 Example 24-When the first and second jaws are in one of the closed positions, they are supported to move axially between the first and second jaws. The surgical instrument of Example 21, 22 or 23 further comprising a launching member.
実施例25−エンドエフェクタ装着アセンブリは一対の外側部を備える、実施例21、22、23又は24の外科用器具。各外側部は、枢動軸線を規定する側方突出トラニオンピンを備える。第1の顎部及び第2の顎部の各々は、側方突出トラニオンピンの各々の上で枢動的に支持されている。 Example 25-The surgical instrument of Example 21, 22, 23 or 24, wherein the end effector mounting assembly comprises a pair of outer portions. Each outer portion comprises a laterally projecting trunnion pin that defines the pivot axis. Each of the first and second jaws is pivotally supported on each of the laterally projecting trunnion pins.
実施例26−付勢するための手段は、第1の顎部と第2の顎部との間に配置されたスプリングを含む、実施例21、22、23、24又は25の外科用器具。 Example 26-Surgical instruments of Examples 21, 22, 23, 24 or 25, wherein the means for urging comprises a spring located between the first jaw and the second jaw.
実施例27−閉鎖モーションを加えるための手段は、軸方向可動エンドエフェクタ閉鎖スリーブを含み、そのエンドエフェクタ閉鎖スリーブは、エンドエフェクタ閉鎖スリーブが第1の方向に軸方向に移動されるときに、第1の顎部の一部分と第2の顎部の一部分とに同時に係合するように構成されている、実施例21、22、23、24、25又は26の外科用器具。 Example 27-Means for applying a closing motion includes an axially movable end effector closing sleeve, wherein the end effector closing sleeve is the first when the end effector closing sleeve is moved axially in the first direction. The surgical instrument of Examples 21, 22, 23, 24, 25 or 26, which is configured to simultaneously engage a portion of one jaw and a portion of a second jaw.
実施例28−第1の顎部及び第2の顎部が閉鎖位置のうちの1つにあるときに、第1の顎部と第2の顎部との間で軸方向に移動するように支持された軸方向可動発射部材を更に備える、実施例21、22、23、24、25、26又は27の外科用器具。 Example 28-Axial movement between the first jaw and the second jaw when the first jaw and the second jaw are in one of the closed positions. The surgical instrument of Examples 21, 22, 23, 24, 25, 26 or 27 further comprising a supported axially movable launch member.
実施例29−発射部材は組織切断表面を備える、実施例28の外科用器具。 Example 29-The surgical instrument of Example 28, wherein the launching member comprises a tissue cut surface.
実施例30−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。エンドエフェクタ装着アセンブリが、シャフト軸線を横断する関節運動軸線を中心として選択的に関節運動するように細長シャフトアセンブリに移動可能に結合されている。第1及び第2の顎部がエンドエフェクタ装着アセンブリに移動可能に結合され、それにより、第1及び第2の顎部が各々、互いに対してまたシャフト軸線に対して、開放位置と閉鎖位置との間で移動可能となり、それにより、閉鎖モーションが第1及び第2の顎部に加えられると、第1の顎部及び第2の顎部の一方は閉鎖位置のうちの1つに、第1の顎部及び第2の顎部のもう一方が閉鎖位置に移動する閉鎖速度とは異なる別の閉鎖速度で移動することになる。外科用器具は、第1及び第2の顎部に閉鎖モーションを、また閉鎖位置から開放位置へと第1及び第2の顎部を選択的に移動させるように第1及び第2の顎部に開放モーションを選択的に加えるための手段を更に備える。 Example 30-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The end effector mounting assembly is movably coupled to the elongated shaft assembly for selective joint motion about the joint motion axis across the shaft axis. The first and second jaws are movably coupled to the end effector mounting assembly so that the first and second jaws are in open and closed positions with respect to each other and with respect to the shaft axis, respectively. It becomes movable between, so that when a closing motion is applied to the first and second jaws, one of the first and second jaws will be placed in one of the closing positions. The one jaw and the other of the second jaw will move at a different closing speed than the closing speed at which they move to the closed position. Surgical instruments have a closing motion to the first and second jaws and a first and second jaw to selectively move the first and second jaws from the closed position to the open position. Further provided with means for selectively adding open motion to the.
実施例31−軸方向可動発射部材を更に備え、その発射部材は、第1及び第2の顎部が閉鎖位置のうちの1つにあるときに、第1の顎部と第2の顎部との間で軸方向に移動するように支持されている、実施例30の外科用器具。 Example 31-Axial movable launcher further comprising a first jaw and a second jaw when the first and second jaws are in one of the closed positions. The surgical instrument of Example 30, which is supported to move axially with and from.
実施例32−エンドエフェクタ装着アセンブリ上に第1のカムスロットを更に備える、実施例30又は31の外科用器具。第1のカムスロットは、第1の閉鎖ウェッジ部分と第1の開放ウェッジ部分とを画定する。また第2のカムスロットがエンドエフェクタ装着アセンブリ上に設けられる。第2のカムスロットは、第2の閉鎖ウェッジ部分と第2の開放ウェッジ部分とを画定する。第1の顎部は一対の第1の開放部材と一対の第1の閉鎖部材とを備え、第1の開放部材のうちの一方及び第1の閉鎖部材のうちの一方は第1のカムスロット内に移動可能に受容されている。第1の開放部材のうちのもう一方及び第1の閉鎖部材のうちのもう一方は、第2のカムスロット内に受容されている。第2の顎部は一対の第2の開放部材と一対の第2の閉鎖部材とを備え、第2の開放部材のうちの一方及び第2の閉鎖部材のうちの一方は第1のカムスロット内に移動可能に受容されている。第2の開放部材のうちのもう一方及び第2の閉鎖部材のうちのもう一方は、第2のカムスロット内に移動可能に受容されている。選択的に加えるための手段は、第1の閉鎖部材のうちの一方及び第2の閉鎖部材のうちの一方を第1の閉鎖ウェッジ部分に移動可能に進入させ、第1の閉鎖部材のうちのもう一方及び第2の閉鎖部材のうちのもう一方を第2の閉鎖ウェッジ部分に移動可能に進入させ、それによって、閉鎖位置のうちの1つへと互いに向かって第1及び第2の顎部を移動させるために、第1の方向に第1及び第2の顎部を移動させるように構成されている。選択的に加えるための手段は、第1の閉鎖部材のうちの一方及び第2の閉鎖部材のうちの一方を第1の開放ウェッジ部分の中に移動させ、第1の閉鎖部材のうちのもう一方及び第2の閉鎖部材のうちのもう一方を第2の開放ウェッジ部分の中に移動させ、それによって、開放位置へと互いから離して第1及び第2の顎部を移動させるために、第2の方向に第1及び第2の顎部を移動させるように更に構成されている。 Example 32-The surgical instrument of Example 30 or 31, further comprising a first cam slot on the end effector mounting assembly. The first cam slot defines a first closed wedge portion and a first open wedge portion. A second cam slot is also provided on the end effector mounting assembly. The second cam slot defines a second closed wedge portion and a second open wedge portion. The first jaw includes a pair of first opening members and a pair of first closing members, one of the first opening members and one of the first closing members being a first cam slot. It is movably accepted within. The other of the first opening members and the other of the first closing members are received in the second cam slot. The second jaw includes a pair of second opening members and a pair of second closing members, one of the second opening members and one of the second closing members being the first cam slot. It is movably accepted within. The other of the second opening members and the other of the second closing members are movably received in the second cam slot. Means for selectively adding one of the first closing members and one of the second closing members movably enter the first closing wedge portion of the first closing member. The other and the other of the second closing members are movably entered into the second closing wedge portion, thereby moving the first and second jaws towards one of the closing positions. It is configured to move the first and second jaws in the first direction in order to move. Means for selective addition is to move one of the first closing members and one of the second closing members into the first open wedge portion and the other of the first closing members. To move one and the other of the second closing members into the second open wedge portion, thereby moving the first and second jaws away from each other to the open position. It is further configured to move the first and second jaws in the second direction.
実施例33−第1のカムスロットは、エンドエフェクタ装着アセンブリに結合される第1のカムプレートに形成されている、実施例32の外科用器具。第2のカムスロットは、エンドエフェクタ装着アセンブリに結合される第2のカムプレートに形成されている。 Example 33-The surgical instrument of Example 32, wherein the first cam slot is formed in a first cam plate that is coupled to an end effector mounting assembly. The second cam slot is formed in the second cam plate that is coupled to the end effector mounting assembly.
実施例34−選択的に加えるための手段は、閉鎖及び開放モーションが加えられたことに反応して軸方向に移動可能であるエンドエフェクタ閉鎖スリーブを含む、実施例32又は33の外科用器具。エンドエフェクタ閉鎖スリーブは、エンドエフェクタ閉鎖スリーブが第2の方向に移動されるときに動作可能に接触するための、第1の開放部材のうちの一方及び第2の開放部材のうちの一方に対応する第1の開放タブを備える。第2の開放タブは、エンドエフェクタ閉鎖スリーブが第2の方向に移動されるときに動作可能に接触するための、第1の開放部材のうちのもう一方及び第2の開放部材のうちのもう一方に対応する。 Example 34-The surgical instrument of Example 32 or 33, comprising an end effector closing sleeve that is axially movable in response to the closing and opening motion being applied. The end effector closing sleeve corresponds to one of the first opening members and one of the second opening members for operable contact when the end effector closing sleeve is moved in the second direction. A first open tab is provided. The second opening tab is the other of the first opening members and the other of the second opening members for operable contact when the end effector closing sleeve is moved in the second direction. Corresponds to one.
実施例35−第1の顎部及び第2の顎部の一方は、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備え、第1の顎部及び第2の顎部のもう一方はアンビルを備える、実施例30、31、32、33又は34の外科用器具。 Example 35-One of the first jaw and the second jaw comprises an elongated channel configured to operably support a surgical staple cartridge therein, the first jaw and the second jaw. The surgical instrument of Example 30, 31, 32, 33 or 34, wherein the other side of the jaw comprises an anvil.
実施例36−第1及び第2の顎部が閉鎖位置のうちの1つにあるときに、第1の顎部と第2の顎部との間で軸方向に移動するように支持される発射部材を更に備える、実施例31、32、33、34又は35の外科用器具。 Example 36-Supported to move axially between the first and second jaws when the first and second jaws are in one of the closed positions. The surgical instrument of Example 31, 32, 33, 34 or 35 further comprising a launching member.
実施例37−開放位置と閉鎖位置との間で選択的に枢動移動するように互いに対して枢動的に支持される第1の顎部と第の2顎部とを備える、外科用器具。閉鎖部材は、閉鎖及び開放モーションが加えられたことに反応して軸方向に移動可能である。閉鎖部材は、少なくとも2つの内向き延出開放タブを備え、それらの内向き延出開放タブは、第1の顎部及び第2の顎部の少なくとも一方を開放位置へ移動させるために、開放モーションが閉鎖部材に加えられると、第1の顎部及び第2の顎部の少なくとも一方の対応する部分に動作可能に係合するように構成されている。 Example 37-A surgical instrument comprising a first jaw and a second jaw that are pivotally supported against each other for selective pivotal movement between an open position and a closed position. .. The closing member is axially movable in response to the closing and opening motions being applied. The closing member comprises at least two inward extension open tabs, which open to move at least one of the first jaw and the second jaw to the open position. When motion is applied to the closing member, it is configured to operably engage at least one corresponding portion of the first jaw and the second jaw.
実施例38−少なくとも2つの内向き延出開放タブの少なくとも一方は、閉鎖部材内に一体的に形成されている、実施例37の外科用器具。 Example 38-The surgical instrument of Example 37, wherein at least one of at least two inwardly extending open tabs is integrally formed within the closing member.
実施例39−少なくとも2つの内向き延出開放タブの各々は、閉鎖部材に着脱可能に固定されている、実施例37の外科用器具。 Example 39-The surgical instrument of Example 37, wherein each of at least two inwardly extending open tabs is detachably secured to a closing member.
実施例40−第1の顎部及び第2の顎部の一方は、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備え、第1の顎部及び第2の顎部のもう一方はアンビルを備える、実施例37、38又は39の外科用器具。 Example 40-One of the first jaw and the second jaw comprises an elongated channel configured to operably support a surgical staple cartridge therein, the first jaw and the second jaw. The surgical instrument of Example 37, 38 or 39, wherein the other side of the jaw comprises an anvil.
実施例41−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用ステープル留め器具。外科用エンドエフェクタが、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動可能となるように、関節継手によって細長シャフトアセンブリに動作可能に結合されている。外科用エンドエフェクタは、外科用ステープルカートリッジを中に動作可能に支持するように構成されたカートリッジ支持部材を備える。長手方向可動発射ビームが、関節継手を通じて延び、外科用エンドエフェクタ内で開始位置から終了位置へと選択的に軸方向に移動可能である。外科用器具は、付勢部材を備える発射ビームロックアセンブリを更に備え、付勢部材は、関節継手上で動作可能に支持され、かつ長手方向可動発射ビームに付勢モーションを加えてロック位置へと長手方向可動発射ビームを付勢するように構成され、このロック位置では、長手方向可動発射ビームは、未発射の外科用ステープルカートリッジがカートリッジ支持部材内で動作可能に支持されていなければ、開始位置から終了位置へと移動することを防止されている。 Example 41-A surgical staple fastening device comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is operably coupled to the elongated shaft assembly by a joint so that it can be selectively articulated relative to the elongated shaft assembly about the articular motion axis across the shaft axis. The surgical end effector comprises a cartridge support member configured to operably support the surgical staple cartridge inside. A longitudinally movable firing beam extends through the joint and is selectively axially movable from start to end within the surgical end effector. The surgical instrument further comprises a firing beam lock assembly with a urging member, which is operably supported on the articulated joint and urges the longitudinally movable firing beam to the locked position. It is configured to urge the longitudinally movable firing beam, and in this locked position, the longitudinally movable firing beam is in the starting position unless the unlaunched surgical staple cartridge is operably supported within the cartridge support member. It is prevented from moving from to the end position.
実施例42−付勢部材は、カートリッジ支持部材及び細長シャフトアセンブリとインターフェースする中央支持部材上で支持されている、実施例41の外科用ステープル留め器具。中央支持部材は、関節運動軸線を中心とした外科用エンドエフェクタの関節運動の間に長手方向可動発射ビームを側方で支持するように構成されている。 Example 42-The surgical staple fastening device of Example 41, wherein the urging member is supported on a central support member that interfaces with the cartridge support member and the elongated shaft assembly. The central support member is configured to laterally support the longitudinal movable firing beam during the joint movement of the surgical end effector centered on the joint movement axis.
実施例43−付勢部材は、外科用エンドエフェクタが関節運動されているときに長手方向可動発射ビームに付勢モーションを加えることを回避するように構成されている、実施例41又は42の外科用ステープル留め器具。 Example 43-Surgery of Example 41 or 42, wherein the urging member is configured to avoid applying urging motion to the longitudinal movable firing beam when the surgical end effector is in joint motion. Staple fasteners for.
実施例44−長手方向可動発射ビームは、付勢部材と係合するための、その一部分に形成されたロックカムを備える、実施例41、42、又は43の外科用ステープル留め器具。 Example 44-The surgical staple fastening device of Example 41, 42, or 43, wherein the longitudinally movable firing beam comprises a lock cam formed in a portion thereof for engaging with an urging member.
実施例45−付勢部材は、中に配置された窓を備える平面的本体を備え、それにより、ロックカムは外科用エンドエフェクタの関節運動の間にその窓の中へと突出する、実施例44の外科用ステープル留め器具。 Example 45-The urging member comprises a planar body with a window arranged therein, whereby the lock cam projects into the window during the joint movement of the surgical end effector, Example 44. Surgical staple fastening device.
実施例46−付勢部材は、未発射の外科用ステープルカートリッジがカートリッジ支持部材内で動作可能に支持されていなければ、発射モーションが長手方向可動発射ビームに最初に加えられると、ロック位置へと長手方向可動発射ビームを付勢する、実施例41、42、43、44、又は45の外科用ステープル器具。 Example 46-The urging member will be in the locked position when the firing motion is first applied to the longitudinally movable firing beam unless the unlaunched surgical staple cartridge is operably supported within the cartridge support member. The surgical staple instrument of Example 41, 42, 43, 44, or 45 that urges a longitudinally movable firing beam.
実施例47−未発射の外科用ステープルカートリッジは、カートリッジ本体内で動作可能に支持された複数の外科用ステープルと、ウェッジスレッドであって、そのウェッジスレッドが未発射位置から発射位置へと移動されるときに外科用ステープルを排出するように、カートリッジ本体を通じて軸方向に移動可能である、ウェッジスレッドと、を備える、実施例41、42、43、44、45、又は46の外科用ステープル留め器具。ウェッジスレッドは、長手方向可動発射ビームが開始位置にあり、ウェッジスレッドが未発射位置にあるときに、長手方向可動発射ビームと動作可能に係合するように構成されている。 Example 47-The unfired surgical staple cartridge is a plurality of surgical staples operably supported within the cartridge body and wedge threads, the wedge threads being moved from the unfired position to the fired position. Surgical staple fasteners of Examples 41, 42, 43, 44, 45, or 46, comprising wedge threads that are axially movable through the cartridge body so that the surgical staples are ejected when .. The wedge thread is configured to operably engage the longitudinal movable firing beam when the longitudinal movable firing beam is in the starting position and the wedge thread is in the unlaunched position.
実施例48−カートリッジ支持部材内で支持されている外科用ステープルカートリッジ内のウェッジスレッドが、外科用ステープルカートリッジ内で未発射位置になく、長手方向可動発射ビームとの動作可能な係合をなしていなければ、付勢部材は、発射モーションが発射ビームに最初に加えられると、ロック位置へと発射ビームを付勢する、実施例41、42、43、44、45、又は46の外科用ステープル留め器具。 Example 48-The wedge thread in the surgical staple cartridge supported in the cartridge support member is not in the unlaunched position in the surgical staple cartridge and has a operable engagement with the longitudinal movable firing beam. If not, the urging member urges the firing beam to the locked position when the firing motion is first applied to the firing beam, surgical staple fastening of Examples 41, 42, 43, 44, 45, or 46. Instrument.
実施例49−ウェッジスレッドは、ウェッジスレッドが未発射位置にあるとき、また最初の発射モーションが長手方向可動発射ビームに加えられた際に、発射ビームがロック位置に入るのを防止するように構成されている、実施例48の外科用ステープル留め器具。 Example 49-The wedge thread is configured to prevent the firing beam from entering the locked position when the wedge thread is in the unlaunched position and when the first firing motion is applied to the longitudinally movable firing beam. The surgical staple fastening device of Example 48.
実施例50−外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備える外科用エンドエフェクタを備える、外科用ステープル留め器具。アンビルは、細長チャネルに対して支持され、アンビル及び細長チャネルの一方がアンビル及び細長チャネルのもう一方に対して開放位置と閉鎖位置との間で選択的に移動可能となるようになっている。外科用器具は細長シャフトアセンブリを更に備え、細長シャフトアセンブリはシャフト軸線を規定し、シャフト軸線を横断する関節運動軸線を中心とした細長シャフトアセンブリに対する外科用エンドエフェクタの選択的な関節運動を促進するために、外科用エンドエフェクタに動作可能に結合される関節継手を備える。細長シャフトアセンブリは、閉鎖モーションが加えられたことに反応して軸方向に移動可能である閉鎖アセンブリを更に備える。閉鎖アセンブリは、遠位閉鎖部材セグメントと近位閉鎖部材セグメントとを備え、近位閉鎖セグメントは、関節運動軸線を中心とした外科用エンドエフェクタの関節運動に適応するように遠位閉鎖部材セグメントと移動可能にインターフェースする。近位閉鎖部材セグメントは、閉鎖モーションが閉鎖アセンブリに加えられるとアンビル及び細長チャネルの一方を開放位置と閉鎖位置との間で移動させるように構成されている。外科用ステープル留め器具は長手方向可動発射ビームを更に備え、長手方向可動発射ビームは、関節継手を通じて延び、外科用エンドエフェクタ内で開始位置から終了位置へと選択的に軸方向に移動可能である。長手方向可動発射ビームは、長手方向可動発射ビームが開始位置にあるとき、細長チャネル内で動作可能に支持される未発射の外科用ステープルカートリッジの対応する部分と動作可能に係合するように構成されている。外科用ステープル留め器具は、付勢部材を備える発射ビームロックアセンブリを更に備え、付勢部材は、ロック位置へと長手方向可動発射ビームを付勢するために遠位閉鎖部材セグメント上で動作可能に支持され、ロック位置では、長手方向可動発射ビームは、未発射の外科用ステープルカートリッジが細長チャネル内で動作可能に支持されていなければ、開始位置から終了位置へと移動することを防止されている。 Example 50-A surgical staple fastening device comprising a surgical end effector with an elongated channel configured to operably support a surgical staple cartridge therein. Anvils are supported for elongated channels so that one of the anvil and elongated channels can selectively move between open and closed positions with respect to the other of the anvil and elongated channels. Surgical instruments further include an elongated shaft assembly, which defines the shaft axis and facilitates selective joint movement of the surgical end effector for the elongated shaft assembly centered on the joint motion axis across the shaft axis. In order to provide a joint that is operably coupled to a surgical end effector. The elongated shaft assembly further comprises a closure assembly that is axially movable in response to the closing motion being applied. The closure assembly comprises a distal closure segment and a proximal closure segment, the proximal closure segment with the distal closure segment to adapt to the joint motion of the surgical end effector centered on the joint motion axis. Interface movable. The proximal closure segment is configured to move one of the anvil and elongated channels between the open and closed positions when a closing motion is applied to the closing assembly. The surgical staple fastening device further comprises a longitudinal movable firing beam, which extends through the joint and is selectively axially movable from start to end within the surgical end effector. .. The longitudinal movable firing beam is configured to operably engage the corresponding portion of an unlaunched surgical staple cartridge that is operably supported within an elongated channel when the longitudinal movable firing beam is in the starting position. Has been done. Surgical staple fasteners further include a firing beam lock assembly with urging members, which can operate on the distal closure segment to urge the longitudinally movable firing beam to the locking position. In the supported and locked position, the longitudinal movable firing beam is prevented from moving from the start position to the end position unless the unlaunched surgical staple cartridge is operably supported within the elongated channel. ..
実施例51−長手方向可動発射ビームは、長手方向可動発射ビームが開始位置にあるときに付勢部材と係合するように構成された傾斜部分を有する、実施例50の外科用ステープル留め器具。 Example 51-The surgical staple fastening device of Example 50, wherein the longitudinal movable firing beam has an inclined portion configured to engage an urging member when the longitudinal movable firing beam is in the starting position.
実施例52−未発射の外科用ステープルカートリッジは、カートリッジ本体内で動作可能に支持された複数の外科用ステープルと、ウェッジスレッドであって、そのウェッジスレッドが未発射位置から発射位置へと移動されるときに外科用ステープルを排出するように、カートリッジ本体を通じて軸方向に移動可能である、ウェッジスレッドと、を備える、実施例50又は51の外科用ステープル留め器具。ウェッジスレッドは、長手方向可動発射ビームが開始位置にあり、ウェッジスレッドが未発射位置にあるときに、長手方向可動発射ビームと動作可能に係合するように構成されている。 Example 52-The unfired surgical staple cartridge is a plurality of surgical staples operably supported within the cartridge body and wedge threads, the wedge threads being moved from the unfired position to the fired position. The surgical staple fastening device of Example 50 or 51, comprising a wedge thread, which is axially movable through the cartridge body so that the surgical staple is ejected when the staple is ejected. The wedge thread is configured to operably engage the longitudinal movable firing beam when the longitudinal movable firing beam is in the starting position and the wedge thread is in the unlaunched position.
実施例53−ウェッジスレッドは、ウェッジスレッドが未発射位置にあるとき、また最初の発射モーションが長手方向可動発射ビームに加えられた際に、発射ビームがロック位置に入るのを防止するように構成されている、実施例52の外科用ステープル留め器具。 Example 53-The wedge thread is configured to prevent the firing beam from entering the locked position when the wedge thread is in the unlaunched position and when the first firing motion is applied to the longitudinally movable firing beam. The surgical staple fastening device of Example 52.
実施例54−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用ステープル留め器具。外科用エンドエフェクタが、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動可能となるように、関節継手によって細長シャフトアセンブリに動作可能に結合されている。外科用エンドエフェクタは、外科用ステープルカートリッジを中に動作可能に支持するように構成されたカートリッジ支持部材を備える。外科用ステープル留め器具は長手方向可動発射ビームを更に備え、長手方向可動発射ビームは、関節継手を通じて延び、かつ外科用エンドエフェクタ内で開始位置から終了位置へと選択的に軸方向に移動可能である部分を含む。長手方向可動発射ビームは、長手方向可動発射ビームが開始位置にあるとき、カートリッジ支持部材内で動作可能に支持された未発射の外科用ステープルカートリッジの対応する部分と動作可能に係合するように構成されている。外科用ステープル留め器具は、外科用エンドエフェクタが関節運動軸線を中心として関節運動されているときに、関節継手を通じて延びる長手方向可動発射ビームの部分に側方支持を提供するための手段を更に含む。提供するための手段は、外科用ステープルカートリッジがカートリッジ支持部材内で動作可能に支持されていなければ、長手方向可動発射ビームが開始位置から終了位置に移動するのを防止するための手段を更に備える。 Example 54-A surgical staple fastening device comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is operably coupled to the elongated shaft assembly by a joint so that it can be selectively articulated relative to the elongated shaft assembly about the articular motion axis across the shaft axis. The surgical end effector comprises a cartridge support member configured to operably support the surgical staple cartridge inside. Surgical staple closures further include a longitudinal movable firing beam that extends through the joint and is selectively axially movable from start to end within the surgical end effector. Includes some parts. The longitudinal movable firing beam is operably engaged with the corresponding portion of the unlaunched surgical staple cartridge operably supported within the cartridge support member when the longitudinal movable firing beam is in the starting position. It is configured. Surgical staple fastening devices further include means for providing lateral support to a portion of the longitudinal movable firing beam that extends through the joint when the surgical end effector is jointly exercising around the joint motion axis. .. Means for providing are further provided with means for preventing the longitudinal movable firing beam from moving from the start position to the end position if the surgical staple cartridge is not operably supported within the cartridge support member. ..
実施例55−側方支持を与えるための手段は、カートリッジ支持部材及び細長シャフトアセンブリに移動可能に取り付けられる中央支持部材を更に備える、実施例54の外科用ステープル留め器具。中央支持部材は、長手方向可動発射ビームの部分を、それを通じて移動可能に受容するためのスロットを備える。防止するための手段は付勢部材を備え、付勢部材は、中央支持部材上で支持され、かつ長手方向可動発射ビームに付勢モーションを加えて長手方向可動発射ビームをロック位置へと移動させるように構成され、このロック位置では、長手方向可動発射ビームは、未発射の外科用ステープルカートリッジがカートリッジ支持部材内で動作可能に支持されていなければ、開始位置から終了位置へと移動することを防止されている。 Example 55-The surgical staple fastening device of Example 54, further comprising a cartridge support member and a central support member movably attached to an elongated shaft assembly. The central support member comprises a slot for movably receiving a portion of the longitudinally movable firing beam through it. The means for preventing is provided with an urging member, which is supported on the central support member and applies an urging motion to the longitudinal movable firing beam to move the longitudinal movable firing beam to the locked position. In this locked position, the longitudinally movable firing beam moves from the start position to the end position if the unlaunched surgical staple cartridge is not operably supported within the cartridge support member. It is prevented.
実施例56−長手方向可動発射ビームは、長手方向可動発射ビームのうちの付勢部材と係合するための部分に形成されたロックカムを備える、実施例55の外科用ステープル留め器具。 Example 56-The surgical staple fastening device of Example 55, wherein the longitudinal movable firing beam comprises a lock cam formed in a portion of the longitudinal movable firing beam for engaging with an urging member.
実施例57−付勢部材は、中に配置された窓を備える平面的本体を備え、それにより、ロックカムは外科用エンドエフェクタの関節運動の間にその窓の中へと突出する、実施例56の外科用ステープル留め器具。 Example 57-The urging member comprises a planar body with a window arranged therein, whereby the lock cam projects into the window during the joint movement of the surgical end effector, Example 56. Surgical staple fastening device.
実施例58−未発射の外科用ステープルカートリッジは、カートリッジ本体内で動作可能に支持される複数の外科用ステープルと、ウェッジスレッドであって、そのウェッジスレッドが未発射位置から発射位置へと移動されるときに外科用ステープルを排出するように、カートリッジ本体を通じて軸方向に移動可能である、ウェッジスレッドと、を備える、実施例54、55、55又は57の外科用ステープル留め器具。ウェッジスレッドは、長手方向可動発射ビームが開始位置にあり、ウェッジスレッドが未発射位置にあるときに、長手方向可動発射ビームと動作可能に係合するように構成されている。 Example 58-The unfired surgical staple cartridge is a plurality of surgical staples operably supported within the cartridge body and wedge threads, the wedge threads being moved from the unfired position to the fired position. The surgical staple fastening device of Example 54, 55, 55 or 57, comprising a wedge thread, which is axially movable through the cartridge body so that the surgical staples are ejected when. The wedge thread is configured to operably engage the longitudinal movable firing beam when the longitudinal movable firing beam is in the starting position and the wedge thread is in the unlaunched position.
実施例59−ウェッジスレッドは、ウェッジスレッドが未発射位置にあるとき、また最初の発射モーションが長手方向可動発射ビームに加えられた際に、発射ビームがロック位置に入るのを防止するように構成されている、実施例58の外科用ステープル留め器具。 Example 59-The wedge thread is configured to prevent the firing beam from entering the locked position when the wedge thread is in the unlaunched position and when the first firing motion is applied to the longitudinally movable firing beam. The surgical staple fastening device of Example 58.
実施例60−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタが、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動可能となるように、関節継手によって細長シャフトアセンブリに動作可能に結合される。長手方向可動可撓性発射ビームが、関節継手を可撓的に横断するように構成され、かつ外科用エンドエフェクタ内で開始位置から終了位置へと選択的に軸方向に移動可能である。中央支持部材が、細長シャフトアセンブリ、及び外科用エンドエフェクタの一部分に移動可能に結合される。中央支持部材は、近位端部と遠位端部とを含む中央本体部分を備える。発射ビームスロットが近位端部と遠位端部との間に延び、関節継手を横断する可撓性発射ビームの一部分の各外側部を移動可能に支持するように構成されている。外科用器具は、細長近位本体を備える近位支持リンクを更に備え、細長近位本体は、中央支持部材の近位側に配置され、関節継手を横断する可撓性発射ビームの近位外側部分を側方で支持するように構成されている。近位支持リンクは、中央支持部材の近位端部と移動可能にインターフェースする。外科用器具は、細長遠位本体を備える遠位支持リンクを更に備え、細長遠位本体は、中央支持部材の遠位側に配置され、関節継手を横断する可撓性発射ビームの対応する遠位外側部分を側方で支持するように構成されている。遠位支持リンクは、中央支持部材の遠位端部と移動可能にインターフェースする。 Example 60-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is operably coupled to the elongated shaft assembly by a joint so that the surgical end effector is selectively articulated relative to the elongated shaft assembly about the articular motion axis across the shaft axis. The longitudinally movable flexible firing beam is configured to flexibly traverse the joint and is selectively axially movable from start to end within the surgical end effector. The central support member is movably coupled to the elongated shaft assembly and part of the surgical end effector. The central support member comprises a central body portion that includes a proximal end and a distal end. A firing beam slot extends between the proximal and distal ends and is configured to movably support each lateral portion of a portion of the flexible firing beam that traverses the joint. Surgical instruments further include a proximal support link with an elongated proximal body, which is located proximal to the central support member and proximal to the lateral side of the flexible firing beam across the joint. It is configured to support the part sideways. The proximal support link movably interfaces with the proximal end of the central support member. Surgical instruments further include a distal support link with an elongated distal body, which is located distal to the central support member and corresponds to a flexible firing beam across the joint. It is configured to support the lateral part on the side. The distal support link movably interfaces with the distal end of the central support member.
実施例61−近位支持リンクの細長近位本体は、近位頂部部材と、2つの下向きに延びる対向する近位支持壁とを備える、実施例60の外科用器具。近位支持壁のうちの1つは、関節継手を横断する可撓性発射ビームの近位外側部分のうちの1つに隣接して配置されている。対向する近位支持壁のうちの別の1つは、関節継手を横断する可撓性発射ビームの近位外側部分のうちの別の1つに隣接する。遠位支持リンクの細長遠位本体は、遠位頂部部材と、2つの下向きに延びる対向する遠位支持壁とを備える。遠位支持壁のうちの1つは、関節継手を横断する可撓性発射ビームの遠位外側部分のうちの1つに隣接して配置されている。対向する遠位支持壁のうちの別の1つは、関節継手を横断する可撓性発射ビームの遠位外側部分のうちの別の1つに隣接する。 Example 61-The surgical instrument of Example 60, wherein the elongated proximal body of the proximal support link comprises a proximal apical member and two opposing proximal support walls extending downward. One of the proximal support walls is located adjacent to one of the proximal lateral portions of the flexible firing beam across the articulation joint. Another one of the opposing proximal support walls is adjacent to another one of the proximal lateral parts of the flexible firing beam that traverses the joint. The elongated distal body of the distal support link comprises a distal apical member and two opposing distal support walls extending downward. One of the distal support walls is located adjacent to one of the distal lateral portions of the flexible firing beam that traverses the articular joint. Another one of the opposing distal support walls is adjacent to another one of the distal lateral parts of the flexible firing beam that traverses the joint.
実施例62−近位支持壁のうちの1つは、関節継手を横断する可撓性発射ビームの近位外側部分のうちの1つに面する近位弓形表面を含み、近位支持壁のうちの別の1つは、関節継手を横断する可撓性発射ビームの近位外側部分のうちの別の1つに面する別の近位弓形表面を含む、実施例61の外科用器具。遠位支持壁の1つは、関節継手を横断する可撓性発射ビームの遠位外側部分のうちの1つに面する遠位弓形表面を含む。遠位支持壁のうちの別の1つは、関節継手を横断する可撓性発射ビームの遠位外側部分のうちの別の1つに面する別の遠位弓形表面を含む。 Example 62-One of the proximal support walls comprises a proximal arched surface facing one of the proximal lateral portions of a flexible firing beam that traverses the articular joint of the proximal support wall. Another one of them is a surgical instrument of Example 61, comprising another proximal arched surface facing another one of the proximal lateral portions of a flexible firing beam that traverses a joint. One of the distal support walls includes a distal arched surface facing one of the distal lateral parts of the flexible firing beam that traverses the articular joint. Another one of the distal support walls includes another distal arched surface facing another one of the distal lateral parts of the flexible firing beam that traverses the articular joint.
実施例63−中央支持部材の近位端部は、近位支持リンクの近位頂部部材の遠位ノーズ部分を中に移動可能に受容するように構成された弓形近位ポケットを備える、実施例61又は62の外科用器具。中央支持部材の遠位端部は、遠位支持リンクの遠位頂部部材の近位ノーズ部分を中に移動可能に受容するように構成された遠位弓形ポケットを備える。 Example 63-The proximal end of the central support member comprises an arched proximal pocket configured to movably receive the distal nose portion of the proximal apical member of the proximal support link. 61 or 62 surgical instruments. The distal end of the central support member comprises a distal arch pocket configured to movably receive the proximal nose portion of the distal apical member of the distal support link.
実施例64−中央支持部材は、枢動軸線を中心として外科用エンドエフェクタに対して枢動的に移動するように、外科用エンドエフェクタの一部分に枢動的に結合されている、実施例60、61、62又は63の外科用器具。中央支持部材は、細長シャフトアセンブリに対して枢動的にまた軸方向に移動するように細長シャフトアセンブリに結合されている。 Example 64-The central support member is pivotally coupled to a portion of the surgical end effector such that it moves pivotally with respect to the surgical end effector about the pivot axis, Example 60. , 61, 62 or 63 surgical instruments. The central support member is coupled to the elongated shaft assembly so as to move pivotally and axially with respect to the elongated shaft assembly.
実施例65−中央支持部材は、中央支持部材の細長スロットを通じて延びる近位ピンによって細長シャフトアセンブリにピン留めされている、実施例64の外科用器具。 Example 65-The surgical instrument of Example 64, wherein the central support member is pinned to an elongated shaft assembly by a proximal pin extending through an elongated slot in the central support member.
実施例66−細長シャフトアセンブリは、近位頂部部材の近位ノーズ部分を中に移動可能に受容するように構成された遠位スパインポケットを備える遠位スパインを備える、実施例60、61、62、63、64又は65の外科用器具。 Example 66-The elongated shaft assembly comprises a distal spine with a distal spine pocket configured to movably receive the proximal nose portion of the proximal apical member in Examples 60, 61, 62. , 63, 64 or 65 surgical instruments.
実施例67−外科用エンドエフェクタの一部分は、遠位頂部部材の遠位ノーズ部分を中に移動可能に受容するように構成されたチャネルポケットを備える、実施例60、61、62、63、64、65又は66の外科用器具。 Example 67-A portion of a surgical end effector comprises a channel pocket configured to movably receive a distal nose portion of a distal apical member in Examples 60, 61, 62, 63, 64. , 65 or 66 surgical instruments.
実施例68−外科用エンドエフェクタの一部分は、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備える、実施例60、61、62、63、64、65、66又は67の外科用器具。 Example 68-A portion of the surgical end effector comprises an elongated channel configured to operably support a surgical staple cartridge therein, Examples 60, 61, 62, 63, 64, 65, 66 or 67 surgical instruments.
実施例69−細長チャネルに対して支持されたアンビルを更に備え、アンビルと細長チャネルの一方が、アンビルと細長チャネルのもう一方に対して開放位置と閉鎖位置との間で選択的に移動可能となるようになっている、実施例68の外科用器具。 Example 69-Additional anvil supported for an elongated channel, allowing one of the anvil and the elongated channel to selectively move between the open and closed positions with respect to the other of the anvil and the elongated channel. The surgical instrument of Example 68, which is designed to be.
実施例70−シャフト軸線を規定し、かつ遠位端部に形成された左右の対向するシャフトノッチを備える細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタが、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動可能となるように、関節継手によって細長シャフトアセンブリに動作可能に結合されている。長手方向可動可撓性発射ビームが、関節継手を可撓的に横断するように構成され、かつ外科用エンドエフェクタ内で開始位置から終了位置へと選択的に軸方向に移動可能である。中央支持部材が、細長シャフトアセンブリ、及び外科用エンドエフェクタの一部分に移動可能に結合されている。中央支持部材は、遠位端部に形成された左右の対向する支持ノッチと、関節継手を横断する長手方向可動可撓性発射ビームの外側部分を移動可能に支持するように構成された発射ビームスロットとを含む中央本体部分を備える。枢動リンクが、関節継手を横断する長手方向可動可撓性発射ビームの側面部分を側方で支持するように構成されている。枢動リンクは近位突出近位ノーズ部分を備え、近位突出近位ノーズ部分は、長手方向可動可撓性発射ビームが関節運動軸線を中心とした外科用エンドエフェクタの関節運動に反応して屈曲するとき、左右の対向するシャフトノッチのうちのいずれか1つに移動可能に係合するように構成されている。遠位突出遠位ノーズ部分は、長手方向可動可撓性発射ビームが関節運動軸線を中心とした外科用エンドエフェクタの関節運動に反応して屈曲するとき、可動支持部材の左右の対向する支持ノッチのうちのいずれか1つに移動可能に係合するように構成されている。 Example 70-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis and has left and right opposing shaft notches formed at the distal end. The surgical end effector is operably coupled to the elongated shaft assembly by a joint so that it can be selectively articulated relative to the elongated shaft assembly about the articular motion axis across the shaft axis. The longitudinally movable flexible firing beam is configured to flexibly traverse the joint and is selectively axially movable from start to end within the surgical end effector. A central support member is movably coupled to an elongated shaft assembly and a portion of a surgical end effector. The central support member is configured to movably support the left and right opposing support notches formed at the distal end and the outer portion of the longitudinally movable flexible launch beam that traverses the joint. It has a central body part including a slot. The pivot link is configured to laterally support a lateral portion of a longitudinally movable flexible firing beam that traverses the joint. The pivot link has a proximal protruding proximal nose, which is a longitudinally movable flexible firing beam that responds to the joint movement of the surgical end effector centered on the joint movement axis. When flexed, it is configured to movably engage with any one of the left and right opposing shaft notches. Distal protrusion The distal nose portion is the left and right opposing support notches of the movable support member as the longitudinal movable flexible firing beam bends in response to the joint movement of the surgical end effector centered on the joint movement axis. It is configured to movably engage any one of them.
実施例71−枢動リンクは、長手方向可動可撓性発射ビームの外側部分のうちの1つに隣接する第1の側方支持壁と、長手方向可動可撓性発射ビームの外側部分のうちの別の1つに隣接する第2の側方支持壁と、を更に備える、実施例70の外科用器具。 Example 71-The pivot link is of a first lateral support wall adjacent to one of the outer portions of the longitudinally movable flexible firing beam and of the outer portion of the longitudinally movable flexible firing beam. The surgical instrument of Example 70, further comprising a second lateral support wall adjacent to another one of.
実施例72−第1の側方支持壁は、長手方向可動可撓性発射ビームの外側部分のうちの1つに面する第1の弓形表面を含み、第2の側方支持壁は、長手方向可動可撓性発射ビームの別の外側部分のうちの別の1つに面する第2の弓形表面を含む、実施例71の外科用器具。 Example 72-The first lateral support wall comprises a first arcuate surface facing one of the outer portions of a longitudinally movable flexible firing beam, and the second lateral support wall is longitudinal. The surgical instrument of Example 71, comprising a second arcuate surface facing another one of the other outer portions of the directionally movable flexible firing beam.
実施例73−長手方向可動可撓性発射ビームの1つの外側部分と第1の側方支持壁との間に延びる第1の圧迫バンドを更に備える、実施例71又は72の外科用器具。第1の圧迫バンドは、外科用エンドエフェクタ上で支持される第1の遠位端部と、細長シャフトアセンブリ上で移動可能に支持される第1の近位端部とを備える。第2の圧迫バンドは、長手方向可動可撓性発射ビームの別の外側部分と第2の側方支持壁との間に延びる。第2の圧迫バンドは、外科用エンドエフェクタ上で支持される第2の遠位端部と、細長シャフトアセンブリ上で移動可能に支持される第2の近位端部とを備える。 Example 73-The surgical instrument of Example 71 or 72, further comprising a first compression band extending between one outer portion of the longitudinally movable flexible firing beam and the first lateral support wall. The first compression band comprises a first distal end supported on a surgical end effector and a first proximal end movably supported on an elongated shaft assembly. The second compression band extends between another outer portion of the longitudinally movable flexible firing beam and the second lateral support wall. The second compression band comprises a second distal end supported on a surgical end effector and a second proximal end movably supported on an elongated shaft assembly.
実施例74−長手方向可動可撓性発射ビームの1つの外側部分と第1の圧迫バンドとの間に延びる第3の圧迫バンドを更に備える、実施例73の外科用器具。第3の圧迫バンドは、外科用エンドエフェクタ上で支持される第3の遠位端部と、細長シャフトアセンブリ上で移動可能に支持される第3の近位端部とを備える。第4の圧迫バンドは、長手方向可動可撓性発射ビームの別の外側部分と第2の圧迫バンドとの間に延びる。第4の圧迫バンドは、外科用エンドエフェクタ上で支持される第4の遠位端部と、細長シャフトアセンブリ上で移動可能に支持される第4の近位端部とを備える。 Example 74-The surgical instrument of Example 73 further comprising a third compression band extending between one outer portion of the longitudinally movable flexible firing beam and the first compression band. The third compression band comprises a third distal end supported on a surgical end effector and a third proximal end movably supported on an elongated shaft assembly. The fourth compression band extends between another outer portion of the longitudinally movable flexible firing beam and the second compression band. The fourth compression band comprises a fourth distal end supported on a surgical end effector and a fourth proximal end movably supported on an elongated shaft assembly.
実施例75−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタが、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動可能となるように、関節継手によって細長シャフトアセンブリに動作可能に結合されている。長手方向可動可撓性発射ビームが、関節継手を可撓的に横断するように構成され、かつ外科用エンドエフェクタ内で開始位置から終了位置へと選択的に軸方向に移動可能である。中央支持部材が、細長シャフトアセンブリに対して軸方向にまた枢動的に移動するように細長シャフトアセンブリに移動可能に結合され、かつ外科用エンドエフェクタに枢動的に結合されている。外科用器具は、近位頂部部材と2つの近位側部部材とを備えるU字形状の近位支持リンクを更に備える。U字形状の近位支持リンクは、近位側部部材のうちの1つが長手方向可動可撓性発射ビームの近位部分の1つの外側部に隣接し、近位側部部材のうちの別の1つが長手方向可動可撓性発射ビームの近位部分の別の外側部に隣接するように、長手方向可動可撓性発射ビームの近位部分に被さって延びる。近位頂部部材は、中央支持部材と移動可能にインターフェースする。外科用器具は、遠位頂部部材と2つの遠位側部部材とを備えるU字形状の遠位支持リンクを更に備える。U字形状の遠位支持リンクは、遠位側部部材のうちの1つが長手方向可動可撓性発射ビームの遠位部分の1つの外側部に隣接し、遠位側部部材のうちの別の1つが長手方向可動可撓性発射ビームの遠位部分の別の外側部に隣接するように、長手方向可動可撓性発射ビームの遠位部分に被さって延びる。遠位頂部部材は、中央支持部材と移動可能にインターフェースする。 Example 75-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is operably coupled to the elongated shaft assembly by a joint so that it can be selectively articulated relative to the elongated shaft assembly about the articular motion axis across the shaft axis. The longitudinally movable flexible firing beam is configured to flexibly traverse the joint and is selectively axially movable from start to end within the surgical end effector. The central support member is movably coupled to the elongated shaft assembly so as to move axially and pivotally with respect to the elongated shaft assembly, and is pivotally coupled to the surgical end effector. The surgical instrument further comprises a U-shaped proximal support link with a proximal apical member and two proximal lateral members. The U-shaped proximal support link has one of the proximal side members adjacent to one outer portion of the proximal portion of the longitudinally movable flexible firing beam and another of the proximal side members. One extends over the proximal portion of the longitudinally movable flexible firing beam so as to be adjacent to another outer portion of the proximal portion of the longitudinally movable flexible firing beam. The proximal apex member movably interfaces with the central support member. The surgical instrument further comprises a U-shaped distal support link with a distal apical member and two distal lateral members. The U-shaped distal support link has one of the distal lateral members adjacent to one lateral portion of the distal portion of the longitudinally movable flexible firing beam and another of the distal lateral members. One extends over the distal portion of the longitudinally movable flexible firing beam so as to be adjacent to another outer portion of the distal portion of the longitudinally movable flexible firing beam. The distal apical member movably interfaces with the central support member.
実施例76−近位頂部部材は細長シャフトアセンブリと移動可能にインターフェースし、遠位頂部部材は外科用エンドエフェクタの一部分と移動可能にインターフェースする、実施例75の外科用器具。 Example 76-The surgical instrument of Example 75, wherein the proximal apex member is movably interfaced with an elongated shaft assembly and the distal apex member is movably interfaced with a portion of a surgical end effector.
実施例77−近位頂部部材は、細長シャフトアセンブリに形成された遠位ポケットの中へと移動可能に延びる第1の近位突出近位ノーズ部分と、中央支持部材の近位ポケットの中へと移動可能に延びる第1の遠位突出遠位ノーズ部分とを備える、実施例75又は76の外科用器具。遠位頂部部材は、中央支持部材の遠位ポケットの中へと移動可能に延びる第2の近位突出近位ノーズ部分と、外科用エンドエフェクタのチャネルポケットの中へと移動可能に延びる第2の遠位突出遠位ノーズ部分と、を備える。 Example 77-The proximal apex member is into a first proximal projecting proximal nose portion that movably extends into a distal pocket formed in an elongated shaft assembly and into a proximal pocket of a central support member. The surgical instrument of Example 75 or 76, comprising a first distal protruding distal nose portion that extends movably. The distal apical member has a second proximal projecting proximal nose that movably extends into the distal pocket of the central support member and a second that movably extends into the channel pocket of the surgical end effector. With a distal protruding distal nose portion of.
実施例78−2つの近位側部部材のうちの1つは、長手方向可動可撓性発射ビームの近位部分の1つの外側部に面する近位弓形表面を備える、実施例75、76又は77の外科用器具。近位側部部材のうちの別の1つは、長手方向可動可撓性発射ビームの近位部分の別の外側部に面する別の近位弓形表面を含む。2つの遠位側部部材のうちの1つは、長手方向可動可撓性発射ビームの遠位部分の1つの外側部に面する遠位弓形表面を備える。遠位側部部材のうちの別の1つは、長手方向可動可撓性発射ビームの遠位部分の別の遠位側部に面する別の遠位弓形表面を備える。 Examples 78-2 One of the two proximal side members comprises a proximal arched surface facing one outer portion of the proximal portion of the longitudinally movable flexible firing beam, Examples 75, 76. Or 77 surgical instruments. Another one of the proximal side members includes another proximal arcuate surface facing another outer portion of the proximal portion of the longitudinally movable flexible firing beam. One of the two distal lateral members comprises a distal arched surface facing one outer portion of the distal portion of the longitudinally movable flexible firing beam. Another one of the distal side members comprises another distal arched surface facing another distal side of the distal portion of the longitudinally movable flexible firing beam.
実施例79−中央支持部材は、外科用ステープルカートリッジを中に動作可能に支持するように構成された外科用エンドエフェクタの細長チャネルに移動可能に結合されている、実施例75、76、77又は78の外科用器具。 Example 79-The central support member is movably coupled to an elongated channel of a surgical end effector configured to operably support a surgical staple cartridge in, Examples 75, 76, 77 or 78 surgical instruments.
実施例80−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタが、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動可能となるように、関節継手によって細長シャフトアセンブリに動作可能に結合される。中央発射ビーム支持部材が関節継手を越えて延び、かつ外科用エンドエフェクタに結合される遠位端部と、細長シャフトアセンブリに取り付けられる近位端部とを備える。長手方向可動可撓性発射ビームが、関節継手を可撓的に横断するように構成され、外科用エンドエフェクタ内で開始位置から終了位置へと選択的に軸方向に移動可能である。長手方向可動可撓性発射ビームアセンブリは、ビーム層のうちの少なくとも1つが中央発射ビーム支持部材の1つの外側部を移動可能に通過するように構成され、ビーム層のうちの他の少なくとも1つが中央発射ビーム支持部材の別の外側部を移動可能に通過するように、互いに対して支持される複数のビーム層を備える。複数の側方荷重支持部材が中央発射ビーム支持体に対応し、かつ、中央発射ビーム支持部材の1つの外側部を移動可能に通過するように構成された、ビーム層のうちの少なくとも1つ、及び中央発射ビーム支持部材の別の外側部を移動可能に通過するように構成された、ビーム層のうちの他の少なくとも1つの各部分の上で支持される。 Example 80-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is operably coupled to the elongated shaft assembly by a joint so that the surgical end effector is selectively articulated relative to the elongated shaft assembly about the articular motion axis across the shaft axis. A centrally launched beam support member extends beyond the articulation joint and comprises a distal end that is coupled to a surgical end effector and a proximal end that is attached to an elongated shaft assembly. A longitudinally movable flexible firing beam is configured to flexibly traverse the articulation joint and is selectively axially movable from start to end within the surgical end effector. The longitudinally movable flexible firing beam assembly is configured such that at least one of the beam layers is movably passed through one outer portion of the central firing beam support member, and at least one of the other beam layers. It comprises a plurality of beam layers supported against each other so as to movably pass through another outer portion of the centrally launched beam support member. At least one of the beam layers configured such that a plurality of lateral load bearing members correspond to a centrally launched beam support and movably pass through one outer portion of the centrally launched beam support member. And supported on each of at least one other portion of the beam layer configured to movably pass through another outer portion of the centrally launched beam support member.
実施例81−中央発射ビーム支持部材の1つの外側部を移動可能に通過するように構成された、ビーム層のうちの少なくとも1つは、ビーム層のうちの2つを含み、中央発射ビーム支持部材の別の外側部を通過するように構成された、ビーム層のうちの他の少なくとも1つは、他のビーム層のうちの2つを含む、実施例80の外科用器具。 Example 81-At least one of the beam layers configured to movably pass through one outer portion of a centrally launched beam support member comprises two of the beam layers and is centrally launched beam support. The surgical instrument of Example 80, wherein the other at least one of the beam layers, configured to pass through another outer portion of the member, comprises two of the other beam layers.
実施例82−側方荷重支持部材は互いに対して移動可能である、実施例80又は81の外科用器具。 Example 82-The surgical instrument of Example 80 or 81, wherein the lateral load bearing members are movable relative to each other.
実施例83−側方荷重支持部材の各々は、中央発射ビーム支持部材の1つの外側部を移動可能に通過するように構成された、ビーム層のうちの少なくとも1つ、及び中央発射ビーム支持部材の別の外側部を移動可能に通過するように構成された、ビーム層のうちの他の少なくとも1つの各部分を移動可能に受容するための軸方向通路を備える、実施例80、81又は82の外科用器具。 Example 83-Each of the lateral load support members is configured to movably pass through one outer portion of the centrally-launched beam-supporting member, at least one of the beam layers, and the centrally-launched beam-supporting member. 80, 81 or 82, comprising an axial passage for movably receiving each other portion of the beam layer, configured to movably pass through another outer portion of the beam layer. Surgical instruments.
実施例84−関節継手によって細長シャフトアセンブリに結合される外科用エンドエフェクタの一部分が、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備える、実施例80、81、82又は83の外科用器具。 Example 84-Examples 80, 81, wherein a portion of the surgical end effector coupled to the elongated shaft assembly by a joint comprises an elongated channel configured to operably support a surgical staple cartridge therein. 82 or 83 surgical instruments.
実施例85−細長チャネルに対して支持されたアンビルを更に備え、アンビルと細長チャネルの一方が、アンビルと細長チャネルのもう一方に対して開放位置と閉鎖位置との間で選択的に移動可能となるようになっている、実施例84の外科用器具。 Example 85-Additional anvil supported for elongated channels, allowing one of the anvil and elongated channels to selectively move between open and closed positions with respect to the other of the anvil and elongated channels The surgical instrument of Example 84, which is designed to be.
実施例86−中央発射ビーム支持部材の遠位端部は、外科用エンドエフェクタに取り付けられるように長手方向可動可撓性発射ビームアセンブリの底部表面の下方に突出し、中央発射ビーム支持部材の近位端部は、細長シャフトアセンブリに取り付けられるように長手方向可動可撓性発射ビームアセンブリの上部表面の上方に突出する、実施例80、81、82、83、84又は85の外科用器具。 Example 86-The distal end of the centrally launched beam support member projects below the bottom surface of the longitudinally movable flexible firing beam assembly for attachment to a surgical end effector and is proximal to the centrally launched beam support member. The surgical instrument of Examples 80, 81, 82, 83, 84 or 85, wherein the ends project above the upper surface of the longitudinally movable flexible firing beam assembly for attachment to the elongated shaft assembly.
実施例87−中央発射ビーム支持部材の遠位端部は外科用エンドエフェクタの細長チャネルにピン留めされ、中央発射ビーム支持部材の近位端部は細長シャフトアセンブリのスパイン部分にピン留めされている、実施例86の外科用器具。 Example 87-The distal end of the centrally launched beam support member is pinned to the elongated channel of the surgical end effector, and the proximal end of the centrally launched beam support member is pinned to the spine portion of the elongated shaft assembly. , The surgical instrument of Example 86.
実施例88−複数の側方荷重支持部材のうちの少なくとも2つはそれぞれ弓形端部表面を含み、かつ、少なくとも2つの側方荷重支持部材のうちの1つの弓形端部表面のうちの1つが、少なくとも2つの側方荷重支持部材のうちの別の1つの弓形端部表面のうちの別の1つに隣接するように、中央発射ビーム支持部材の1つの外側部を移動可能に通過するように構成された、ビーム層のうちの少なくとも1つ、及び中央発射ビーム支持部材の別の外側部を移動可能に通過するように構成された、ビーム層のうちの他の少なくとも1つの各部分の上に配置されている、実施例80、81、82、83、84、85、86又は87の外科用器具。 Example 88-At least two of the plurality of lateral load bearing members each include an arched end surface, and one of at least one of the two lateral load bearing members has an arched end surface. To moveably pass through one outer portion of the centrally launched beam support member so as to be adjacent to another one of the bowed end surfaces of another one of the at least two lateral load support members. Of each of at least one of the beam layers configured in, and at least one other portion of the beam layer configured to movably pass through another outer portion of the centrally launched beam support member. The surgical instruments of Examples 80, 81, 82, 83, 84, 85, 86 or 87, which are located above.
実施例89−各軸方向通路は、長手方向可動可撓性発射ビーム上における各側方荷重支持部材の枢動的移動を促進するように構成された、一対の離間した内部弓形表面を備える、実施例83の外科用器具。 Example 89-Each axial passage comprises a pair of spaced internal arcuate surfaces configured to facilitate the pivotal movement of each lateral load bearing member on a longitudinally movable flexible launch beam. The surgical instrument of Example 83.
実施例90−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタが、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動可能となるように、関節継手によって細長シャフトアセンブリに動作可能に結合されている。中央発射ビーム支持部材がシャフト軸線に沿って軸方向に整列され、関節継手を越えて延びる。中央発射ビーム支持部材は、外科用エンドエフェクタに結合される遠位端部と、細長シャフトアセンブリに取り付けられる近位端部とを備える。長手方向可動可撓性発射ビームアセンブリが関節継手を横断するときに、ビーム層のうちの少なくとも1つが中央発射ビーム支持部材の各外側部を通過するように、外科用器具は、中央発射ビーム支持部材を軸方向に通過するように構成された複数のビーム層を備える長手方向可動可撓性発射ビームアセンブリを更に備える。外科用エンドエフェクタが関節運動軸線を中心として関節運動されるときに、関節継手を横断する長手方向可動可撓性発射ビームの一部分を側方で支持するための手段が、長手方向可動可撓性発射ビーム上において移動可能に支持される。 Example 90-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is operably coupled to the elongated shaft assembly by a joint so that it can be selectively articulated relative to the elongated shaft assembly about the articular motion axis across the shaft axis. The centrally launched beam support member is axially aligned along the shaft axis and extends beyond the articulation joint. The centrally launched beam support member comprises a distal end that is coupled to a surgical end effector and a proximal end that is attached to an elongated shaft assembly. The surgical instrument supports the centrally-launched beam so that at least one of the beam layers passes through each lateral portion of the centrally-launched beam-supporting member as the longitudinally movable flexible firing beam assembly traverses the joint. It further comprises a longitudinally movable flexible launch beam assembly with a plurality of beam layers configured to traverse the member axially. Longitudinal Movable Flexibility A means for laterally supporting a portion of the longitudinally movable flexible launch beam across the joint when the surgical end effector is articulated about the joint motion axis is longitudinally movable flexible. Movably supported on the launch beam.
実施例91−中央発射ビーム支持部材の遠位端部は、外科用エンドエフェクタに取り付けられるように長手方向可動可撓性発射ビームアセンブリの底部表面の下方に突出する、実施例90の外科用器具。中央発射ビーム支持部材の近位端部は、細長シャフトアセンブリに取り付けられるように長手方向可動可撓性発射ビームアセンブリの上部表面の上方に突出する。 Example 91-The surgical instrument of Example 90, in which the distal end of the centrally launched beam support member projects below the bottom surface of a longitudinally movable flexible firing beam assembly for attachment to a surgical end effector. .. The proximal end of the central firing beam support member projects above the upper surface of the longitudinally movable flexible firing beam assembly for attachment to the elongated shaft assembly.
実施例92−関節継手によって細長シャフトアセンブリに結合される外科用エンドエフェクタの一部分が、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備える、実施例90又は91の外科用器具。 Example 92-Section 90 or 91, wherein a portion of the surgical end effector coupled to the elongated shaft assembly by a joint comprises an elongated channel configured to operably support a surgical staple cartridge therein. Surgical instruments.
実施例93−細長チャネルに対して支持されたアンビルを更に備え、アンビルと細長チャネルの一方が、アンビルと細長チャネルのもう一方に対して開放位置と閉鎖位置との間で選択的に移動可能となるようになっている、実施例92の外科用器具。 Example 93-Further provision of anvils supported for elongated channels, allowing one of the anvil and elongated channels to selectively move between open and closed positions with respect to the other of the anvil and elongated channels. The surgical instrument of Example 92, which is designed to be.
実施例94−長手方向可動可撓性発射ビームアセンブリの遠位端部に取り付けられた発射部材を更に備える、実施例90、91、92又は93の外科用器具。 Example 94-Surgical instruments of Example 90, 91, 92 or 93 further comprising a launching member attached to the distal end of a longitudinally movable flexible firing beam assembly.
実施例95−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタが、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動可能となるように、関節継手によって細長シャフトアセンブリに動作可能に結合されている。中央発射ビーム支持部材がシャフト軸線に沿って軸方向に整列され、関節継手を越えて延びる。中央発射ビーム支持部材は、外科用エンドエフェクタに結合される遠位端部と、細長シャフトアセンブリに取り付けられる近位端部とを備える。外科用器具は、複数のビーム層を備える長手方向可動可撓性発射ビームアセンブリを更に備え、長手方向可動可撓性発射ビームアセンブリが遠位側に前進されるとき、長手方向可動可撓性発射ビームアセンブリの各部分が中央発射ビーム支持部材の各外側部の近くを通過するように、長手方向可動可撓性発射ビームアセンブリが、中央発射ビーム支持部材によって分岐されている。 Example 95-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is operably coupled to the elongated shaft assembly by a joint so that it can be selectively articulated relative to the elongated shaft assembly about the articular motion axis across the shaft axis. The centrally launched beam support member is axially aligned along the shaft axis and extends beyond the articulation joint. The centrally launched beam support member comprises a distal end that is coupled to a surgical end effector and a proximal end that is attached to an elongated shaft assembly. Surgical instruments further include a longitudinally movable flexible firing beam assembly with multiple beam layers, and when the longitudinally movable flexible firing beam assembly is advanced distally, the longitudinally movable flexible firing beam assembly. The longitudinally movable flexible firing beam assembly is branched by the central firing beam support member so that each portion of the beam assembly passes near each outer portion of the central firing beam support member.
実施例96−長手方向可動可撓性発射ビームアセンブリ上において移動可能に支持される、外科用エンドエフェクタが関節運動軸線を中心として関節運動されるときに、関節継手を横断する長手方向可動可撓性発射ビームアセンブリの一部分を側方で支持するための手段を更に備える、実施例95の外科用器具。 Example 96-Vertical Movable Flexible Launching Beam Longitudinal movable flexible across a joint when a surgical end effector, supported movably on an assembly, is articulated about a joint motion axis. The surgical instrument of Example 95, further comprising means for laterally supporting a portion of the sex-launched beam assembly.
実施例97−側方で支持するための手段は、長手方向可動可撓性発射ビームアセンブリ上で支持される複数の側方荷重支持部材を備える、実施例95の外科用器具。側方荷重支持部材の各々は、長手方向可動可撓性発射ビームアセンブリ上で独立に移動可能である。 Example 97-The surgical instrument of Example 95, wherein the means for lateral support comprises a plurality of lateral load bearing members supported on a longitudinally movable flexible firing beam assembly. Each of the lateral load bearing members can move independently on a longitudinally movable flexible firing beam assembly.
実施例98−中央発射ビーム支持部材の遠位端部は、外科用エンドエフェクタに取り付けられるように長手方向可動可撓性発射ビームアセンブリの底部表面の下方に突出し、中央発射ビーム支持部材の近位端部は、細長シャフトアセンブリに取り付けられるように長手方向可動可撓性発射ビームアセンブリの上部表面の上方に突出する、実施例95、96又は97の外科用器具。 Example 98-The distal end of the centrally launched beam support member projects below the bottom surface of the longitudinally movable flexible firing beam assembly for attachment to a surgical end effector and is proximal to the centrally launched beam support member. The surgical instrument of Example 95, 96 or 97, wherein the ends project above the upper surface of the longitudinally movable flexible firing beam assembly so that they can be attached to the elongated shaft assembly.
実施例99−側方荷重支持部材の各々は、それらを貫く軸方向通路を含み、その軸方向通路は、長手方向可動可撓性発射ビームアセンブリ上における各側方荷重支持部材の枢動的移動を促進するために、一対の離間した内部弓形表面を備える、実施例97の外科用器具。 Example 99-Each of the lateral load bearing members includes an axial passage through them, the axial passage being the pivotal movement of each lateral load bearing member on a longitudinally movable flexible launch beam assembly. The surgical instrument of Example 97, comprising a pair of spaced internal arched surfaces to facilitate.
実施例100−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタは、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動するように細長シャフトアセンブリに枢動的に結合されている。外科用器具は、対応する関節運動モーションが加えられたことに反応して、遠位方向及び近位方向において選択的に長手方向に移動するように支持される第1の遠位関節ドライバを備える関節運動システムを更に備える。第1の遠位関節ドライバは、外科用エンドエフェクタに動作可能に結合されている。関節運動システムは、遠位方向及び近位方向において長手方向に移動するように支持される第2の遠位関節ドライバを更に備える。第2の遠位関節ドライバは、外科用エンドエフェクタに動作可能に結合されている。少なくとも1つのピニオンギヤが第1の遠位関節ドライバ及び第2の遠位関節ドライバと噛合い係合をなし、それにより、第1の遠位関節ドライバが遠位方向に移動されるとき、少なくとも1つのピニオンギヤは、第2の遠位関節ドライバを近位方向に駆動して、第1の関節運動方向に関節運動軸線を中心として外科用エンドエフェクタを関節運動させ、また、第1の遠位関節ドライバが近位方向に移動されるとき、少なくとも1つのピニオンギヤは、第2の遠位関節ドライバを遠位方向に駆動して、第1の関節運動方向とは反対の第2の関節運動方向に関節運動軸線を中心として外科用エンドエフェクタを関節運動させる。 Example 100-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is pivotally coupled to the elongated shaft assembly so that it selectively articulates with respect to the elongated shaft assembly about the articular motion axis across the shaft axis. The surgical instrument comprises a first distal joint driver that is supported to selectively move longitudinally in the distal and proximal directions in response to the corresponding joint motion motion being applied. Further equipped with a joint movement system. The first distal joint driver is operably coupled to the surgical end effector. The joint motor system further comprises a second distal joint driver that is supported to move longitudinally in the distal and proximal directions. The second distal joint driver is operably coupled to the surgical end effector. When at least one pinion gear engages with the first distal joint driver and the second distal joint driver, thereby moving the first distal joint driver in the distal direction, at least one One pinion gear drives the second distal joint driver proximally to move the surgical end effector around the joint movement axis in the first joint movement direction, and also the first distal joint. When the driver is moved proximally, at least one pinion gear drives the second distal joint driver distally in a second joint motion direction opposite to the first joint motion direction. The surgical end effector is jointly moved around the joint movement axis.
実施例101−第1の遠位関節ドライバは外科用エンドエフェクタに枢動的に結合され、第2の遠位関節ドライバは外科用エンドエフェクタに枢動的に取り付けられている、実施例100の外科用器具。 Example 101-The first distal joint driver is pivotally attached to the surgical end effector and the second distal joint driver is pivotally attached to the surgical end effector, of Example 100. Surgical instruments.
実施例102−第1の遠位関節ドライバは第1の可動カプラによって外科用エンドエフェクタに取り付けられ、第2の遠位関節ドライバは第2の可動カプラによって外科用エンドエフェクタに取り付けられている、実施例100又は101の外科用器具。 Example 102-The first distal joint driver is attached to the surgical end effector by a first movable coupler and the second distal joint driver is attached to the surgical end effector by a second movable coupler. The surgical instrument of Example 100 or 101.
実施例103−第1の可動カプラは第1の玉継手によって第1の遠位関節ドライバに取り付けられ、第2の遠位関節ドライバは第2の玉継手によって第2の可動カプラに取り付けられている、実施例102の外科用器具。 Example 103-The first movable coupler is attached to the first distal joint driver by a first ball joint and the second distal joint driver is attached to a second movable coupler by a second ball joint. Yes, the surgical instrument of Example 102.
実施例104−細長シャフトアセンブリに対して複数の関節運動位置に外科用エンドエフェクタを選択的にロックするための手段を更に備える、実施例100、101、102、又は103の外科用器具。 Example 104-The surgical instrument of Example 100, 101, 102, or 103, further comprising means for selectively locking the surgical end effector at multiple joint motion positions with respect to the elongated shaft assembly.
実施例105−選択的にロックするための手段は、遠位関節ドライバが近位方向及び遠位方向に長手方向に移動することを選択的に防止するための手段を含む、実施例104の外科用器具。 Example 105-Surgery of Example 104, wherein the means for selectively locking includes means for selectively preventing the distal joint driver from moving longitudinally proximally and distally. Equipment.
実施例106−近位関節運動モーション及び遠位関節運動モーションの発生源と動作可能にインターフェースする近位関節ドライバを更に備える、実施例104又は105の外科用器具。近位関節ドライバは、選択的に防止するための手段と動作可能にインターフェースして選択的に防止するための手段を選択的にロック解除し、選択的に防止するための手段に、近位関節運動モーション及び遠位関節運動モーションを第1の遠位関節ドライバに加えさせる。 Example 106-The surgical instrument of Example 104 or 105 further comprising a proximal joint driver operably interfacing with the sources of proximal and distal joint motion motions. The proximal joint driver is a means for selectively unlocking and selectively preventing means for selectively unlocking and selectively preventing the proximal joint. Motion motion and distal joint motion motion is applied to the first distal joint driver.
実施例107−細長シャフトアセンブリに枢動的に結合される外科用エンドエフェクタの一部分が、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備える、実施例100、101、102、103、104、105又は106の外科用器具。 Example 107-Examples 100, 101, wherein a portion of the surgical end effector pivotally coupled to the elongated shaft assembly comprises an elongated channel configured to operably support a surgical staple cartridge therein. , 102, 103, 104, 105 or 106 surgical instruments.
実施例108−細長チャネルに対して支持されるアンビルを更に備え、アンビルと細長チャネルの一方が、アンビルと細長チャネルのもう一方に対して開放位置と閉鎖位置との間で選択的に移動可能となるようになっている、実施例107の外科用ステープル留め器具。 Example 108-Additional anvils supported for elongated channels, allowing one of the anvil and elongated channels to selectively move between open and closed positions with respect to the other of the anvil and elongated channels. The surgical staple fastening device of Example 107, which is designed to be.
実施例109−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタは、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動するように細長シャフトアセンブリに枢動的に結合されている。外科用器具は、対応する関節運動モーションが加えられたことに反応して、遠位方向及び近位方向において選択的に長手方向に移動するように支持される第1の遠位関節ドライバを備える関節運動システムを更に備える。第1の遠位関節ドライバは、外科用エンドエフェクタに動作可能に結合されている。関節運動システムは、第1の遠位関節ドライバ及び外科用エンドエフェクタと動作可能にインターフェースするエンドレス部材を備える第2の遠位関節ドライバを更に備える。エンドレス部材は、第1の遠位関節ドライバの長手方向移動に反応して選択的に回転移動するように細長シャフトアセンブリ上で支持され、それにより、第1の遠位関節ドライバが遠位方向に移動されるとき、エンドレス部材は、外科用エンドエフェクタに、第1の関節運動方向に関節運動軸線を中心として関節運動させ、また、第1の遠位関節ドライバが近位方向に移動されるとき、エンドレス部材は、外科用エンドエフェクタに、第1の関節運動方向とは反対の第2の関節運動方向に関節運動軸線を中心として関節運動させる。 Example 109-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is pivotally coupled to the elongated shaft assembly so that it selectively articulates with respect to the elongated shaft assembly about the articular motion axis across the shaft axis. The surgical instrument comprises a first distal joint driver that is supported to selectively move longitudinally in the distal and proximal directions in response to the corresponding joint motion motion being applied. Further equipped with a joint movement system. The first distal joint driver is operably coupled to the surgical end effector. The joint movement system further comprises a first distal joint driver and a second distal joint driver with an endless member operably interfacing with the surgical end effector. The endless member is supported on the elongated shaft assembly to selectively rotate in response to longitudinal movement of the first distal joint driver, thereby causing the first distal joint driver to move distally. When moved, the endless member causes the surgical end effector to move the joint in the first joint movement direction around the joint movement axis, and when the first distal joint driver is moved proximally. , The endless member causes the surgical end effector to perform joint movement around the joint movement axis in the second joint movement direction opposite to the first joint movement direction.
実施例110−エンドレス部材は、細長シャフトアセンブリに装着された近位プーリ及び外科用エンドエフェクタの遠位プーリ上において回転可能に支持されている、実施例109の外科用器具。 Example 110-The surgical instrument of Example 109, wherein the endless member is rotatably supported on a proximal pulley mounted on an elongated shaft assembly and a distal pulley of a surgical end effector.
実施例111−エンドレス部材は、エンドレス部材に取り付けられ、かつ遠位プーリの取付けポケット内に受容されるように構成された取付けラグによって、遠位プーリに動作可能に取り付けられている、実施例110の外科用器具。 Example 111-The endless member is operably attached to the distal pulley by a mounting lug that is attached to the endless member and configured to be received within the mounting pocket of the distal pulley. Surgical instruments.
実施例112−エンドレス部材は、第1のケーブル端部に取り付けられた第1のラグと第2のケーブル端部に取り付けられた第2のラグとを含むある長さのケーブルを備える、実施例109、110又は111の外科用器具。第2のラグは、エンドレス部材を形成するように第1のラグにも取り付けられている。 Example 112-An endless member comprises a cable of a certain length including a first lug attached to a first cable end and a second lug attached to a second cable end. 109, 110 or 111 surgical instruments. The second lug is also attached to the first lug to form an endless member.
実施例113−遠位関節ドライバは、第1及び第2のラグを中に受容するための第1及び第2のクレードルを備える、実施例112の外科用器具。 Example 113-The surgical instrument of Example 112, wherein the distal joint driver comprises first and second cradle for receiving the first and second lugs therein.
実施例114−遠位プーリは外科用エンドエフェクタの細長チャネル上に形成されている、実施例110又は111の外科用器具。細長チャネルは、外科用ステープルカートリッジをその中に動作可能に支持するように構成されている。 Example 114-The surgical instrument of Example 110 or 111, wherein the distal pulley is formed on an elongated channel of a surgical end effector. The elongated channel is configured to operably support a surgical staple cartridge therein.
実施例115−遠位プーリは外科用エンドエフェクタの細長チャネル上に取り付けられるエンドエフェクタ装着アセンブリ上に形成されている、実施例110又は111の外科用器具。細長チャネルは、外科用ステープルカートリッジを中に動作可能に支持するように構成されている。 Example 115-The surgical instrument of Example 110 or 111, wherein the distal pulley is formed on an end effector mounting assembly mounted on an elongated channel of the surgical end effector. The elongated channel is configured to operably support the surgical staple cartridge inside.
実施例116−細長チャネルに対して支持されたアンビルを更に備え、アンビルと細長チャネルの一方が、アンビルと細長チャネルのもう一方に対して開放位置と閉鎖位置との間で選択的に移動可能となるようになっている、実施例114又は115の外科用器具。 Example 116-Additional anvil supported for an elongated channel, allowing one of the anvil and the elongated channel to selectively move between the open and closed positions with respect to the other of the anvil and the elongated channel. The surgical instrument of Example 114 or 115, which is designed to be.
実施例117−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタは、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動するように細長シャフトアセンブリに枢動的に結合されている。外科用器具は、対応する関節運動モーションが加えられたことに反応して、遠位方向及び近位方向において選択的に長手方向に移動するように支持される第1の遠位関節ドライバを備える関節運動システムを更に備える。第1の遠位関節ドライバは、外科用エンドエフェクタに動作可能に結合されている。関節運動システムは、遠位方向及び近位方向において長手方向に移動するように支持される第2の遠位関節ドライバを更に備える。第2の遠位関節ドライバは、外科用エンドエフェクタに動作可能に結合されている。関節運動システムは、第1の遠位関節ドライバ及び第2の遠位関節ドライバとインターフェースする駆動手段を更に備え、それにより、第1の遠位関節ドライバが遠位方向に移動されるとき、駆動手段は、第2の遠位関節ドライバを近位方向に駆動して、第1の関節運動方向に関節運動軸線を中心として外科用エンドエフェクタを関節運動させ、また、第1の遠位関節ドライバが近位方向に移動されるとき、駆動手段は、第2の遠位関節ドライバを遠位方向に駆動して、第1の関節運動方向とは反対の第2の関節運動方向に関節運動軸線を中心として外科用エンドエフェクタを関節運動させる。 Example 117-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is pivotally coupled to the elongated shaft assembly so that it selectively articulates with respect to the elongated shaft assembly about the articular motion axis across the shaft axis. The surgical instrument comprises a first distal joint driver that is supported to selectively move longitudinally in the distal and proximal directions in response to the corresponding joint motion motion being applied. Further equipped with a joint movement system. The first distal joint driver is operably coupled to the surgical end effector. The joint motor system further comprises a second distal joint driver that is supported to move longitudinally in the distal and proximal directions. The second distal joint driver is operably coupled to the surgical end effector. The joint motor system further comprises a driving means that interfaces with the first distal joint driver and the second distal joint driver, thereby driving when the first distal joint driver is moved distally. The means drives the second distal joint driver in the proximal direction to move the surgical end effector around the joint movement axis in the first joint movement direction, and also the first distal joint driver. When is moved in the proximal direction, the driving means drives the second distal joint driver in the distal direction and the joint movement axis in the second joint movement direction opposite to the first joint movement direction. The surgical end effector is jointly moved around.
実施例118−外科用エンドエフェクタは、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備える、実施例117の外科用器具。アンビルが、細長チャネルに対して支持され、アンビルと細長チャネルの一方が、アンビルと細長チャネルのもう一方に対して開放位置と閉鎖位置との間で選択的に移動可能となるようになっている。 Example 118-A surgical instrument of Example 117, wherein the surgical end effector comprises an elongated channel configured to operably support a surgical staple cartridge therein. Anvils are supported for elongated channels, allowing one of the anvil and elongated channels to selectively move between open and closed positions with respect to the other of the anvil and elongated channels. ..
実施例119−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタは、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動するように細長シャフトアセンブリに枢動的に結合されている。外科用器具は、シャフト軸線を横断する回転軸線を中心として回転移動するように支持される回転関節部材を備える関節運動システムを更に備える。第1の遠位関節ドライバアセンブリは回転関節部材と動作可能にインターフェースし、かつ回転関節部材によって対応する関節運動モーションが加えられたことに反応して、遠位方向及び近位方向において選択的に長手方向に移動するように支持されている。第1の遠位関節ドライバアセンブリは、外科用エンドエフェクタと動作可能にインターフェースする。第2の遠位関節ドライバアセンブリは、回転関節部材と動作可能にインターフェースし、遠位方向及び近位方向に長手方向に移動するように支持されている。第2の遠位関節ドライバアセンブリは、外科用エンドエフェクタと動作可能にインターフェースする。関節運動システムは、回転軸線を中心として第1及び第2の回転方向に回転関節部材を選択的に回転させるための手段を更に備え、それにより、回転関節部材が、選択的に回転させるための手段によって第1の回転方向に回転されるとき、第1の遠位関節ドライバアセンブリが遠位方向に長手方向に駆動され、第2の遠位関節ドライバが同時に近位方向に移動されて、第1の関節運動方向に関節運動軸線を中心として外科用エンドエフェクタを関節運動させ、また、回転関節部材が選択的に回転させるための手段によって第2の回転方向に回転されるとき、第1の遠位関節ドライバアセンブリが近位方向に長手方向に駆動され、第2の遠位関節ドライバアセンブリが同時に遠位方向に移動されて、第1の関節運動方向とは反対の第2の関節運動方向に関節運動軸線を中心として外科用エンドエフェクタを関節運動させるようになっている。 Example 119-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is pivotally coupled to the elongated shaft assembly so that it selectively articulates with respect to the elongated shaft assembly about the articular motion axis across the shaft axis. Surgical instruments further include a joint motion system comprising a rotary joint member that is supported to rotate about a rotary axis that traverses the shaft axis. The first distal joint driver assembly operably interfaces with the rotary joint member and selectively in the distal and proximal directions in response to the corresponding joint motion motion applied by the rotary joint member. It is supported to move in the longitudinal direction. The first distal joint driver assembly operably interfaces with the surgical end effector. The second distal joint driver assembly operably interfaces with the rotating joint member and is supported to move longitudinally in the distal and proximal directions. The second distal joint driver assembly operably interfaces with the surgical end effector. The joint movement system further comprises means for selectively rotating the rotary joint member in the first and second rotation directions about the rotation axis, whereby the rotary joint member can be selectively rotated. When rotated in the first rotational direction by means, the first distal joint driver assembly is driven distally longitudinally and the second distal joint driver is simultaneously moved proximally to the second. When the surgical end effector is jointly moved in the joint movement direction of 1 around the joint movement axis, and the rotating joint member is rotated in the second rotation direction by means for selectively rotating the joint member, the first The distal joint driver assembly is driven proximally and longitudinally, and the second distal joint driver assembly is simultaneously moved distally in a second joint motion direction opposite to the first joint motion direction. The surgical end effector is designed to jointly move around the joint movement axis.
実施例120−回転関節部材は回転関節ディスクを備え、第1の遠位関節ドライバアセンブリは、回転関節ディスクの第1の関節スロット内で移動可能に支持された第1の関節ドライバ部分を備え、第2の遠位関節ドライバアセンブリは、回転関節ディスクの第2の関節スロット内で移動可能に支持された第2の関節ドライバ部分を備える、実施例119の外科用器具。 Example 120-The rotary joint member comprises a rotary joint disc, and the first distal joint driver assembly comprises a first joint driver portion movably supported within a first joint slot of the rotary joint disc. The surgical instrument of Example 119, wherein the second distal joint driver assembly comprises a second joint driver portion movably supported within a second joint slot of the rotary joint disc.
実施例121−選択的に回転させるための手段が作動されていないときに、第1の関節ドライバ部分と相互作用して第1の遠位関節ドライバアセンブリを第1の中立関節運動位置へと付勢する第1の付勢部材を更に備える、実施例119又は120の外科用器具。第2の付勢部材は、選択的に回転させるための手段が作動されていないときに、第2の関節ドライバ部分と相互作用して第2の遠位関節ドライバアセンブリを第2の中立関節運動位置へと付勢する。 Example 121-When the means for selective rotation is not activated, it interacts with the first joint driver portion to attach the first distal joint driver assembly to the first neutral joint motion position. The surgical instrument of Example 119 or 120 further comprising a first urging member to urge. The second urging member interacts with the second joint driver portion to move the second distal joint driver assembly into the second neutral joint movement when the means for selective rotation is not activated. Bounce to the position.
実施例122−第1の遠位関節ドライバアセンブリは、回転関節部材と移動可能にインターフェースする第1の関節リンクを備える、実施例119、120又は121の外科用器具。第1の関節コネクタは、第1の関節リンクに枢動的に結合されている。第1の関節コネクタは、外科用エンドエフェクタと動作可能にインターフェースする。第2の遠位関節アセンブリは、回転関節部材と移動可能にインターフェースする第2の関節リンクを備え、第2の関節部材は、第2の関節リンクに枢動的に結合され、外科用エンドエフェクタと動作可能にインターフェースする。 Example 122-The surgical instrument of Example 119, 120 or 121, wherein the first distal joint driver assembly comprises a first joint link that movably interfaces with a rotary joint member. The first joint connector is pivotally coupled to the first joint link. The first joint connector operably interfaces with the surgical end effector. The second distal joint assembly comprises a second joint link that movably interfaces with the rotating joint member, the second joint member being pivotally coupled to the second joint link and a surgical end effector. Interface operably with.
実施例123−第1の遠位関節ドライバアセンブリは、第1の関節コネクタ及び外科用エンドエフェクタと動作可能にインターフェースし、かつ細長シャフトアセンブリに対して複数の関節運動位置に外科用エンドエフェクタを選択的にロックするように構成された関節ロックアセンブリを更に備える、実施例122の外科用器具。 Example 123-The first distal joint driver assembly operably interfaces with the first joint connector and the surgical end effector, and selects the surgical end effector in multiple joint motion positions for the elongated shaft assembly. The surgical instrument of Example 122, further comprising a joint locking assembly configured to lock.
実施例124−関節ロックアセンブリ及び外科用エンドエフェクタと動作可能にインターフェースする第1の関節部材を更に備える、実施例123の外科用器具。 Example 124-The surgical instrument of Example 123 further comprising a joint lock assembly and a first joint member operably interfacing with the surgical end effector.
実施例125−第1の関節部材は第1の可動カプラによって外科用エンドエフェクタに結合され、第2の関節部材は第2の可動カプラによって外科用エンドエフェクタに結合されている、実施例124の外科用器具。 Example 125-1 of Example 124, wherein the first joint member is coupled to the surgical end effector by a first movable coupler and the second joint member is coupled to the surgical end effector by a second movable coupler. Surgical instruments.
実施例126−第1の関節部材は第1の玉継手によって第1の可動カプラに結合され、第2の関節部材は第2の玉継手によって第2の可動カプラに結合されている、実施例126の外科用器具。 Example 126-The first joint member is coupled to the first movable coupler by a first ball joint and the second joint member is coupled to a second movable coupler by a second ball joint. 126 surgical instruments.
実施例127−選択的に回転させるための手段は、回転関節部材との噛合い係合をなすモータを備える、実施例119、120、121、122、123、124、125又は126の外科用器具。 Example 127-Surgical instruments of Example 119, 120, 121, 122, 123, 124, 125 or 126, wherein the means for selectively rotating comprises a motor that engages with a rotating joint member. ..
実施例128−長手方向可動発射部材を更に備え、選択的に回転させるための手段は、回転出力モーションを発生させるように構成されたモータと、モータ及び長手方向可動発射部材、及び回転関節部材との動作可能な係合をなす関節駆動リンクと動作可能にインターフェースするスイッチング構成と、を備える、実施例119、120、121、122、123、124、125又は126の外科用器具。スイッチング構成は、モータの作動が結果として、関節駆動リンクに軸方向関節運動モーションを加え、それによって回転関節部材が回転軸線を中心として回転させられる第1の位置と、モータの作動が結果として、長手方向可動発射部材に軸方向発射モーションを加えることになる第2の位置との間で移動するように構成されている。 Example 128-Means further comprising a longitudinal movable launching member and selectively rotating a motor, a motor and a longitudinally movable launching member, and a rotary joint member configured to generate a rotational output motion. 119, 120, 121, 122, 123, 124, 125 or 126 surgical instruments comprising an operably engaging joint drive link and a operably interfaced switching configuration. The switching configuration results in a first position in which the motor actuation results in an axial joint motion motion to the joint drive link, thereby rotating the rotary joint member around the axis of rotation, and the motor actuation as a result. It is configured to move to and from a second position that will apply axial firing motion to the longitudinally movable launching member.
実施例129−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタは、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動するように細長シャフトアセンブリに枢動的に結合されている。外科用器具は、シャフト軸線を横断する回転軸線を中心として回転移動するように支持される回転ドライバ部材を備える関節運動システムを更に備える。回転被動部材が、回転軸線を中心として回転ドライバ部材に対して回転移動するように支持される。回転被動部材は回転駆動部材と動作可能にインターフェースし、それにより、回転ドライバ部材に関節運動制御モーションが加えられると、回転被動部材は回転軸線を中心として回転させられる。第1の遠位関節ドライバアセンブリは少なくとも回転被動部材と動作可能にインターフェースし、かつ少なくとも第1の回転被動部材の回転に反応して、遠位方向及び近位方向において選択的に長手方向に移動するように支持されている。第1の遠位関節ドライバアセンブリは、外科用エンドエフェクタと動作可能にインターフェースする。関節運動システムは、少なくとも回転被動部材と動作可能にインターフェースし、遠位方向及び近位方向において長手方向に移動するように支持される第2の遠位関節ドライバアセンブリを更に備える。第2の遠位関節ドライバアセンブリは、外科用エンドエフェクタと動作可能にインターフェースする。関節運動システムは、回転軸線を中心として回転ドライバ部材を回転させるように、またそれによって回転軸線を中心として回転被動部材を回転させるように、回転ドライバ部材に関節運動制御モーションを選択的に加えるための手段を更に備え、それにより、回転被動部材が第1の回転方向に回転するとき、第1の遠位関節ドライバアセンブリが遠位方向に長手方向に駆動され、第2の遠位関節ドライバが同時に近位方向に移動されて、第1の関節運動方向に関節運動軸線を中心として外科用エンドエフェクタを関節運動させ、また、回転被動部材が第2の回転方向に回転されるとき、第1の遠位関節ドライバアセンブリが近位方向に長手方向に駆動され、第2の遠位関節ドライバアセンブリが同時に遠位方向に移動されて、第1の関節運動方向とは反対の第2の関節運動方向に関節運動軸線を中心として外科用エンドエフェクタを関節運動させる。 Example 129-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is pivotally coupled to the elongated shaft assembly so that it selectively articulates with respect to the elongated shaft assembly about the articular motion axis across the shaft axis. Surgical instruments further include a joint motion system with a rotation driver member supported to rotate around a rotation axis across the shaft axis. The rotation driven member is supported so as to rotate and move with respect to the rotation driver member about the rotation axis. The rotationally driven member operably interfaces with the rotationally driven member so that when a joint motion control motion is applied to the rotational driver member, the rotationally driven member is rotated about a rotation axis. The first distal joint driver assembly operably interfaces with at least the rotationally driven member and selectively moves longitudinally in the distal and proximal directions in response to at least the rotation of the first rotationally driven member. It is supported to do. The first distal joint driver assembly operably interfaces with the surgical end effector. The joint motion system further comprises a second distal joint driver assembly that is operably interfaced with at least a rotationally driven member and is supported to move longitudinally in the distal and proximal directions. The second distal joint driver assembly operably interfaces with the surgical end effector. The joint motion system selectively adds joint motion control motion to the rotary driver member so as to rotate the rotary driver member about the rotary axis and thereby rotate the rotary driven member about the rotary axis. The first distal joint driver assembly is driven distally longitudinally when the rotationally driven member rotates in the first rotational direction, thereby providing a second distal joint driver. At the same time, it is moved in the proximal direction to jointly move the surgical end effector around the joint movement axis in the first joint movement direction, and when the rotation driven member is rotated in the second rotation direction, the first The distal joint driver assembly is driven proximally and longitudinally, and the second distal joint driver assembly is simultaneously moved distally in a second joint motion opposite to the first joint motion direction. The surgical end effector is jointly moved in the direction around the joint movement axis.
実施例130−回転ドライバ部材は回転ドライバ関節ディスクを備え、第2の回転被動部材は回転被動関節ディスクを備え、第1の遠位関節ドライバアセンブリは、回転ドライバ関節ディスク及び回転被動関節ディスクの各々の対応する第1の関節スロット内で移動可能に支持される第1の関節ドライバ部分を備え、第2の遠位関節ドライバアセンブリは、回転ドライバ関節ディスク及び回転被動関節ディスクの各々の対応する第2の関節スロット内で移動可能に支持される第2の関節ドライバ部分を備える、実施例129の外科用器具。 Example 130-The rotary driver member comprises a rotary driver joint disk, the second rotary driven member comprises a rotary driven joint disk, and the first distal joint driver assembly comprises a rotary driver joint disk and a rotary driven joint disk, respectively. The second distal joint driver assembly comprises a first joint driver portion movably supported within the corresponding first joint slot of the rotary driver joint disc and the corresponding first joint disc of the rotary driven joint disc. The surgical instrument of Example 129, comprising a second joint driver portion that is movably supported within the two joint slots.
実施例131−第1の遠位関節ドライバアセンブリは、回転ドライバ部材及び回転被動部材と移動可能にインターフェースする第1の関節リンクと、第1の関節リンクに枢動的に結合される第1の関節部材とを備える、実施例129又は130の外科用器具。第1の関節部材は、外科用エンドエフェクタと動作可能にインターフェースする。第2の遠位関節アセンブリは、回転駆動部材及び回転被動部材と移動可能にインターフェースする第2の関節リンクを備え、第2の関節部材は、第2の関節リンクに枢動的に結合され、外科用エンドエフェクタと動作可能にインターフェースする。 Example 131-The first distal joint driver assembly is a first joint link that movably interfaces with a rotation driver member and a rotation driven member, and a first joint that is pivotally coupled to the first joint link. The surgical instrument of Example 129 or 130, comprising a joint member. The first joint member operably interfaces with the surgical end effector. The second distal joint assembly comprises a second joint link that movably interfaces with the rotationally driven and rotationally driven members, the second joint member being pivotally coupled to the second joint link. Operablely interfaces with surgical end effectors.
実施例132−第1の関節部材は第1の可動カプラによって外科用エンドエフェクタに結合され、第2の関節部材は第2の可動カプラによって外科用エンドエフェクタに結合されている、実施例131の外科用器具。 Example 132-1 of Example 131, wherein the first joint member is coupled to the surgical end effector by a first movable coupler and the second joint member is coupled to the surgical end effector by a second movable coupler. Surgical instruments.
実施例133−第1の関節部材は第1の玉継手によって第1の可動カプラに結合され、第2の関節部材は第2の玉継手によって第2の可動カプラに結合されている、実施例132の外科用器具。 Example 133-The first joint member is coupled to the first movable coupler by the first ball joint, and the second joint member is coupled to the second movable coupler by the second ball joint. 132 surgical instruments.
実施例134−選択的に加えるための手段は、回転ドライバ部材との噛合い係合をなすモータを備える、実施例129、130、131、132又は133の外科用器具。 Example 134-The surgical instrument of Example 129, 130, 131, 132 or 133, comprising a motor that meshes and engages with a rotary driver member as a means for selectively adding.
実施例135−長手方向可動発射部材を更に備え、選択的に加えるための手段は、回転出力モーションを発生させるように構成されたモータを備える、実施例129、130、131、132又は133の外科用器具。選択的に加えるための手段は、モータ及び長手方向可動発射部材、及び回転ドライバ部材と動作可能な係合をなす関節駆動リンクと動作可能にインターフェースするスイッチング構成と、を更に備える。スイッチング構成は、モータの作動が結果として、関節駆動リンクに軸方向関節運動モーションを加え、それによって回転ドライバ部材が回転軸線を中心として回転させられる第1の位置と、モータの作動が結果として、長手方向可動発射部材に軸方向発射モーションを加えることになる第2の位置との間で移動するように構成されている。 Example 135-Surgery of Example 129, 130, 131, 132 or 133 further comprising a longitudinally movable launching member and comprising a motor configured to generate a rotational output motion as a means for selectively adding. Equipment. Means for selective addition further include a motor and a longitudinally movable launch member, and a switching configuration that operably interfaces with a joint drive link that operably engages with a rotary driver member. The switching configuration results in a first position where the motor actuation results in an axial joint motion motion to the joint drive link, which causes the rotation driver member to rotate about the rotation axis, and the motor actuation as a result. It is configured to move to and from a second position that will apply axial firing motion to the longitudinally movable launching member.
実施例136−シャフト軸線を規定する細長シャフトアセンブリを備える、外科用器具。外科用エンドエフェクタは、シャフト軸線を横断する関節運動軸線を中心として細長シャフトアセンブリに対して選択的に関節運動するように細長シャフトアセンブリに枢動的に結合されている。外科医用器具は、外科用エンドエフェクタに動作可能に結合された、関節運動軸線を中心としてエンドエフェクタを関節運動させるための手段と、回転モーションを選択的に発生させるための手段とを備える関節運動システムを更に備える。関節運動システムは、回転モーションを発生させるための手段及び関節運動させるための手段と動作可能にインターフェースする回転部材を更に備え、それにより、選択的に発生させるための手段によって回転部材に回転モーションを加えることは、関節運動させるための手段に、外科用エンドエフェクタに反対の軸方向関節運動モーションを同時に加えさせることになり、一方の反対の軸方向モーションは、関節運動軸線の一方の外側部に対して側方に偏位した外科用エンドエフェクタ上の取付け点に加えられ、もう一方の互いに反対の軸方向モーションは、関節運動軸線の別の外側部上の側方に偏位した外科用エンドエフェクタ上の別の取付け点に加えられるようになっている。 Example 136-A surgical instrument comprising an elongated shaft assembly that defines a shaft axis. The surgical end effector is pivotally coupled to the elongated shaft assembly so that it selectively articulates with respect to the elongated shaft assembly about the articular motion axis across the shaft axis. Surgeon instruments are joint movements that are operably coupled to a surgical end effector and include means for jointly moving the end effector around a joint movement axis and means for selectively generating rotational motion. Further equipped with a system. The joint motion system further comprises a means for generating a rotational motion and a rotating member that operably interfaces with the means for causing the joint motion, thereby causing the rotating member to generate the rotational motion by means for selectively generating it. The addition would cause the surgical end effector to simultaneously apply the opposite axial joint motion to the means for joint motion, while the opposite axial motion would be on one outer side of the joint motion axis. In addition to the attachment point on the surgical end effector that is laterally displaced relative to the other opposite axial motion, the surgical end that is laterally displaced on another lateral part of the joint motion axis. It is designed to be added to another mounting point on the effector.
以下のすべての開示内容が参照によって本明細書に組み込まれる:
1995年4月4日に発行された米国特許第5,403,312号、発明の名称「ELECTROSURGICAL HEMOSTATIC DEVICE」;
2006年2月21日に発行された米国特許第7,000,818号、発明の名称「SURGICAL STAPLING INSTRUMENT HAVING SEPARATE DISTINCT CLOSING AND FIRING SYSTEMS」;
2008年9月9日に発行された米国特許第7,422,139号、発明の名称「MOTOR−DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK」;
2008年12月16日に発行された米国特許第7,464,849号、発明の名称「ELECTRO−MECHANICAL SURGICAL INSTRUMENT WITH CLOSURE SYSTEM AND ANVIL ALIGNMENT COMPONENTS」;
2010年3月2日に発行された米国特許第7,670,334号、発明の名称「SURGICAL INSTRUMENT HAVING AN ARTICULATING END EFFECTOR」;
2010年7月13日に発行された米国特許第7,753,245号、発明の名称「SURGICAL STAPLING INSTRUMENTS」;
2013年3月12日に発行された米国特許第8,393,514号、発明の名称「SELECTIVELY ORIENTABLE IMPLANTABLE FASTENER CARTRIDGE」;
米国特許出願第11/343,803号、名称「SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES」、現在は、米国特許第7,845,537号;
2008年2月14日に出願された米国特許出願第12/031,573号、発明の名称「SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING RF ELECTRODES」;
2008年2月15日に出願された米国特許出願第12/031,873号、発明の名称「END EFFECTORS FOR A SURGICAL CUTTING AND STAPLING INSTRUMENT」、現在は、米国特許第7,980,443号;
米国特許出願第12/235,782号、発明の名称「MOTOR−DRIVEN SURGICAL CUTTING INSTRUMENT」、現在は、米国特許第8,210,411号;
米国特許出願第12/249,117号、発明の名称「POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLY RETRACTABLE FIRING SYSTEM」、現在は、米国特許第8,608,045号;
2009年12月24日に出願された米国特許出願第12/647,100号、名称「MOTOR−DRIVEN SURGICAL CUTTING INSTRUMENT WITH ELECTRIC ACTUATOR DIRECTIONAL CONTROL ASSEMBLY」、現在は、米国特許第8,220,688号);
2012年9月29日に出願された米国特許出願第12/893,461号、発明の名称「STAPLE CARTRIDGE」、現在は、米国特許第8,733,613号;
2011年2月28日に出願された米国特許出願第13/036,647号、発明の名称「SURGICAL STAPLING INSTRUMENT」、現在は、米国特許第8,561,870号;
米国特許出願第13/118,241号、発明の名称「SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS」、現在は、米国特許出願公開第2012/0298719号;
2012年6月15日出願の米国特許出願第13/524,049号、発明の名称「ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE」、現在は、米国特許出願公開第2013/0334278号;
2013年3月13日に出願された米国特許出願第13/800,025号、発明の名称「STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM」、現在は米国特許出願公開第2014/0263551号;
2013年3月13日に出願された米国特許出願第13/800,067号、発明の名称「STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM」、現在は米国特許出願公開第2014/0263552号;
2006年1月31日に出願された米国特許出願公開第2007/0175955号、発明の名称「SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISM」、及び、
2010年4月22日に出願された米国特許出願公開第2010/0264194号、発明の名称「SURGICAL STAPLING INSTRUMENT WITH AN ARTICULATABLE END EFFECTOR」、現在は米国特許第8,308,040号。
All disclosures below are incorporated herein by reference:
U.S. Pat. No. 5,403,312, issued April 4, 1995, title of invention "ELECTROSURGICAL HEMOSTATIC DEVICE";
U.S. Pat. No. 7,000,818 issued on February 21, 2006, title of invention "SURGICAL STAPLING INSTRUMENT HAVING SEPARATE DISTINCT CLOSING AND FIRING SYSTEMS";
U.S. Pat. No. 7,422,139 issued on September 9, 2008, the title of the invention "MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK";
U.S. Pat. No. 7,464,849 issued on December 16, 2008, the title of the invention "ELECTRO-MEMHANICAL SURGICAL INSTRUMENT WITH CLOSE CROSURE SYSTEM AND ANVIL ALIGNMENT COMPONENTS";
U.S. Pat. No. 7,670,334 issued on March 2, 2010, the title of the invention "SURGICAL INSTRUMENT HAVING AN ARTICULATING END EFFECTOR";
U.S. Pat. No. 7,753,245 issued on July 13, 2010, title of invention "SURGICAL STAPLING INSTRUMENTS";
U.S. Pat. No. 8,393,514 issued on March 12, 2013, title of invention "SELECTIVELY ORIENTABLE IMPLANTABLE FASTENEER CARTRIDGE";
U.S. Patent Application No. 11 / 343,803, named "SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES", now U.S. Pat. No. 7,845,537;
U.S. Patent Application No. 12 / 031,573 filed on February 14, 2008, title of invention "SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING RF ELECTRODES";
U.S. Patent Application No. 12 / 031,873 filed on February 15, 2008, the title of the invention "END EFFECTORS FOR A SURGICAL CUTTING AND STAPLING INSTRUMENT", now U.S. Pat. No. 7,980,443;
U.S. Patent Application No. 12 / 235,782, Invention Name "MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT", Currently U.S. Pat. No. 8,210,411;
U.S. Pat.
U.S. Pat. ;
U.S. Patent Application No. 12 / 893,461 filed on September 29, 2012, title of invention "STAPLE CARTRIDGE", now U.S. Pat. No. 8,733,613;
U.S. Patent Application No. 13 / 036,647 filed on February 28, 2011, title of invention "SURGICAL STAPLING INSTRUMENT", now U.S. Pat. No. 8,561,870;
U.S. Patent Application No. 13 / 118,241, Invention Title "SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS", now U.S. Patent Application Publication No. 2012/02987719;
U.S. Patent Application No. 13 / 524,049 filed June 15, 2012, title of invention "ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE", now U.S. Patent Application Publication No. 2013/0334278;
U.S. Patent Application No. 13 / 800,025 filed on March 13, 2013, title of invention "STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM", now U.S. Patent Application Publication No. 2014/0263551;
U.S. Patent Application No. 13 / 800,067 filed on March 13, 2013, title of invention "STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM", now U.S. Patent Application Publication No. 2014/0263552;
U.S. Patent Application Publication No. 2007/017595, filed January 31, 2006, the title of the invention "SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSE TRIGGER LOCKING MECHANISM", and
U.S. Patent Application Publication No. 2010/0264194 filed on April 22, 2010, the title of the invention "SURGICAL STAPLING INSTRUMENT WITH AN ARTICULATABLE END EFFECTOR", now U.S. Patent No. 8,308,040.
特定の開示された実施形態と関連してデバイスの様々な実施形態について本明細書で説明してきたが、それらの実施形態に対して多くの修正及び変更が実施可能である。また、材料が特定の構成要素に関して開示されているが、他の材料が使用されてもよい。更に、様々な実施形態に従って、所与の機能を実行するために、単一の構成要素を複数の構成要素に置き換えてもよく、また複数の構成要素を単一の構成要素に置き換えてもよい。以上の説明及び以下の特許請求の範囲は、そのような修正及び変更をすべて包含することが意図される。 Although various embodiments of the device have been described herein in connection with the particular disclosed embodiments, many modifications and modifications can be made to those embodiments. Also, although the material is disclosed for a particular component, other materials may be used. Further, according to various embodiments, a single component may be replaced by a plurality of components, or a plurality of components may be replaced by a single component in order to perform a given function. .. The above description and the following claims are intended to include all such amendments and changes.
本明細書に開示されるデバイスは、1回の使用後に廃棄されるように設計することができ、又は複数回使用されるように設計することができる。しかしながら、いずれの場合も、デバイスは、少なくとも1回の使用後に再使用のために再調整することができる。再調整には、デバイスの分解工程、それに続く特定の部品の洗浄工程又は交換工程、及びその後の再組立て工程の任意の組み合わせを含むことができる。特に、デバイスは分解可能であり、デバイスの任意の数の特定の部品又は部分を、任意の組み合わせで選択的に交換するか又は取り外すことができる。特定の部分を洗浄及び/又は交換した後、デバイスを後の使用のために、再調整施設で、又は外科処置の直前に外科チームによって再組立てすることができる。当業者であれば、デバイスの再調整が、分解、洗浄/交換、及び再組立てのための様々な技術を利用できることを理解するであろう。かかる技術の使用、及び結果として得られる再調整されたデバイスは、すべて本発明の範囲内にある。 The devices disclosed herein can be designed to be discarded after a single use, or can be designed to be used multiple times. However, in either case, the device can be readjusted for reuse after at least one use. The readjustment can include any combination of a device disassembly step, a subsequent cleaning or replacement step of a particular part, and a subsequent reassembly step. In particular, the device is disassembled and any number of specific parts or parts of the device can be selectively replaced or removed in any combination. After cleaning and / or replacing certain parts, the device can be reassembled for later use by the surgical team at a readjustment facility or shortly before a surgical procedure. Those skilled in the art will appreciate that readjustment of the device can utilize a variety of techniques for disassembly, cleaning / replacement, and reassembly. The use of such techniques and the resulting readjusted devices are all within the scope of the present invention.
単なる例として、本明細書で説明した態様は、手術前に処理されてもよい。最初に、新品又は使用済みの器具が入手され、必要に応じて洗浄されてもよい。次いで器具を滅菌することができる。1つの滅菌技術では、器具は、プラスチックバッグ又はTYVEKバッグなど、閉鎖及び密封された容器に入れられる。次いで、容器及び器具を、ガンマ線、X線、又は高エネルギー電子線などの、容器を透過し得る放射線野に置くことができる。放射線は、器具上及び容器内の細菌を死滅させることができる。この後、滅菌済みの器具を滅菌容器内で保管することができる。密封容器は、医療施設で開けられるまで、器具を滅菌状態に保つことができる。デバイスはまた、β線若しくはγ線、エチレンオキシド、過酸化水素プラズマ、又は水蒸気が挙げられるがこれらに限定されない、当該技術分野で既知の任意の他の技術を用いて滅菌され得る。 As a mere example, the embodiments described herein may be processed prior to surgery. First, new or used utensils may be obtained and cleaned as needed. The instrument can then be sterilized. In one sterilization technique, the instrument is placed in a closed and sealed container, such as a plastic bag or TYVEK bag. The vessel and instrument can then be placed in a radiation field that can penetrate the vessel, such as gamma rays, X-rays, or high energy electron beams. Radiation can kill bacteria on instruments and in containers. After this, the sterilized instrument can be stored in a sterilized container. The sealed container can keep the instrument sterile until it is opened in a medical facility. The device can also be sterilized using any other technique known in the art, including but not limited to β-ray or gamma-ray, ethylene oxide, hydrogen peroxide plasma, or water vapor.
代表的な設計を有するものとして本発明について記載してきたが、本発明は、本開示の趣旨及び範囲内で更に修正されてもよい。したがって、本出願は、その一般的原理を使用する本発明のあらゆる変形、使用、又は適合を包含するものとする。 Although the present invention has been described as having a representative design, the present invention may be further modified within the spirit and scope of the present disclosure. Accordingly, this application shall include any modification, use, or adaptation of the invention that uses its general principles.
全体又は部分的に、参照によって本明細書に組み込まれるとされるいずれの特許、刊行物又はその他の開示物も、援用される内容が既存の定義、記載、又は本開示に記載されているその他の開示物と矛盾しない範囲でのみ本明細書に組み込まれるものとする。それ自体、また必要な範囲で、本明細書に明瞭に記載される開示内容は、参照により本明細書に組み込まれるあらゆる矛盾する記載に優先するものとする。参照により本明細書に組み込まれるものとするが、既存の定義、記載、又は本明細書に記載される他の開示文献と矛盾する任意の文献、又はそれらの部分は、援用文献と既存の開示内容との間に矛盾が生じない範囲においてのみ組み込まれるものとする。 Any patent, publication or other disclosure allegedly incorporated herein by reference, in whole or in part, will be incorporated in an existing definition, description, or other disclosure. It is incorporated herein only to the extent that it is consistent with the disclosure of. As such, and to the extent necessary, the disclosures expressly set forth herein shall supersede any contradictory statements incorporated herein by reference. Any document, or portion thereof, which is incorporated herein by reference but is inconsistent with existing definitions, descriptions, or other disclosed documents described herein, is an incorporated reference and an existing disclosure. It shall be incorporated only to the extent that there is no contradiction with the content.
〔実施の態様〕
(1) 外科用器具であって、
シャフト軸線を規定する細長シャフトアセンブリと、
前記シャフト軸線を横断する関節運動軸線を中心として選択的に関節運動するように前記細長シャフトアセンブリに移動可能に結合されたエンドエフェクタ装着アセンブリと、
各々が互いに対してまた前記シャフト軸線に対して、共通の枢動軸線を中心として開放位置と閉鎖位置との間で移動可能となるように、前記エンドエフェクタ装着アセンブリに移動可能に結合された第1及び第2の顎部であって、前記第1の顎部は第1の点を備え、前記第2の顎部は第2の点を備え、前記第1及び第2の点は前記シャフト軸線に対して垂直である共通の軸線に沿って位置し、前記第1の点は、前記第1の顎部が前記開放位置にあるときの前記シャフト軸線からの第1の距離であり、前記第2の点は、前記第2の顎部が前記開放位置にあるときの前記シャフト軸線からの第2の距離であり、前記第2の距離は前記第1の距離とは異なる、第1及び第2の顎部と、
前記開放位置へと互いから離して前記第1及び第2の顎部を付勢するための手段と、
前記閉鎖位置へと互いに向かって前記第1及び第2の顎部を移動させるように前記第1及び第2の顎部に閉鎖モーションを加えるための手段と、を備える、外科用器具。
(2) 前記第1の顎部及び前記第2の顎部の一方は、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備え、前記第1の顎部及び前記第2の顎部のもう一方はアンビルを備える、実施態様1に記載の外科用器具。
(3) 前記第1の顎部は外科用ステープルカートリッジを備え、前記第2の顎部はアンビルを備え、前記第2の距離は前記第1の距離よりも長い、実施態様1に記載の外科用器具。
(4) 前記第1及び第2の顎部が前記閉鎖位置のうちの1つにあるときに、前記第1の顎部と前記第2の顎部との間で軸方向に移動するように支持される発射部材を更に備える、実施態様2に記載の外科用器具。
(5) 前記エンドエフェクタ装着アセンブリは一対の外側部を備え、各前記外側部は、前記枢動軸線を規定する側方突出トラニオンピンを備え、前記第1の顎部及び前記第2の顎部の各々は、前記側方突出トラニオンピンの各々の上で枢動的に支持されている、実施態様1に記載の外科用器具。
[Implementation]
(1) Surgical instruments
An elongated shaft assembly that defines the shaft axis,
Joint movement across the shaft axis An end effector mounting assembly movably coupled to the elongated shaft assembly for selective joint movement about the axis.
A second movably coupled to the end effector mounting assembly such that each is movable between an open position and a closed position about a common pivot axis with respect to each other and with respect to the shaft axis. The first and second jaws, the first jaw comprising a first point, the second jaw comprising a second point, the first and second points comprising the shaft. Located along a common axis that is perpendicular to the axis, the first point is the first distance from the shaft axis when the first jaw is in the open position. The second point is the second distance from the shaft axis when the second jaw is in the open position, and the second distance is different from the first distance, the first and The second chin and
Means for urging the first and second jaws away from each other to the open position, and
A surgical instrument comprising means for applying a closing motion to the first and second jaws so as to move the first and second jaws towards and to the closing position.
(2) One of the first jaw and the second jaw comprises an elongated channel configured to operably support a surgical staple cartridge therein, the first jaw and the second jaw. The surgical instrument according to embodiment 1, wherein the other side of the second jaw comprises an anvil.
(3) The surgery according to embodiment 1, wherein the first jaw is provided with a surgical staple cartridge, the second jaw is provided with an anvil, and the second distance is longer than the first distance. Equipment.
(4) When the first and second jaws are in one of the closed positions, the first and second jaws are moved axially between the first jaw and the second jaw. The surgical instrument according to
(5) The end effector mounting assembly comprises a pair of outer portions, each lateral portion comprising a laterally projecting trunnion pin defining the pivot axis, the first jaw and the second jaw. The surgical instrument according to embodiment 1, wherein each of the members is pivotally supported on each of the laterally projecting trunnion pins.
(6) 前記付勢するための手段は、前記第1の顎部と前記第2の顎部との間に配置されたスプリングを含む、実施態様1に記載の外科用器具。
(7) 前記閉鎖モーションを加えるための手段は、軸方向可動エンドエフェクタ閉鎖スリーブを含み、前記軸方向可動エンドエフェクタ閉鎖スリーブは、前記エンドエフェクタ閉鎖スリーブが第1の方向に軸方向に移動されるときに、前記第1の顎部の一部分と前記第2の顎部の一部分とに同時に係合するように構成されている、実施態様1に記載の外科用器具。
(8) 前記第1及び第2の顎部が前記閉鎖位置のうちの1つにあるときに、前記第1の顎部と前記第2の顎部との間で軸方向に移動するように支持された軸方向可動発射部材を更に備える、実施態様1に記載の外科用器具。
(9) 前記発射部材は組織切断表面を備える、実施態様8に記載の外科用器具。
(10) 外科用器具であって、
シャフト軸線を規定する細長シャフトアセンブリと、
前記シャフト軸線を横断する関節運動軸線を中心として選択的に関節運動するように前記細長シャフトアセンブリに移動可能に結合されたエンドエフェクタ装着アセンブリと、
各々が互いに対してまた前記シャフト軸線に対して、開放位置と閉鎖位置との間で移動可能となるように、前記エンドエフェクタ装着アセンブリに移動可能に結合された第1及び第2の顎部であって、それにより、閉鎖モーションが前記第1及び第2の顎部に加えられると、前記第1の顎部及び前記第2の顎部の一方は前記閉鎖位置のうちの1つに、前記第1の顎部及び前記第2の顎部のもう一方が前記閉鎖位置のうちの前記1つに移動する閉鎖速度とは異なる別の閉鎖速度で移動することになる、第1及び第2の顎部と、
前記第1及び第2の顎部に前記閉鎖モーションを、また前記閉鎖位置から前記開放位置へと前記第1及び第2の顎部を選択的に移動させるように前記第1及び第2の顎部に開放モーションを選択的に加えるための手段と、を備える、外科用器具。
(6) The surgical instrument according to embodiment 1, wherein the means for urging includes a spring disposed between the first jaw and the second jaw.
(7) The means for applying the closing motion includes an axially movable end effector closing sleeve, and the axially movable end effector closing sleeve is such that the end effector closing sleeve is axially moved in the first direction. The surgical instrument according to embodiment 1, which is configured to simultaneously engage a portion of the first jaw and a portion of the second jaw.
(8) When the first and second jaws are in one of the closed positions, the first and second jaws are moved axially between the first jaw and the second jaw. The surgical instrument according to embodiment 1, further comprising a supported axially movable launch member.
(9) The surgical instrument according to
(10) Surgical instrument
An elongated shaft assembly that defines the shaft axis,
Joint movement across the shaft axis An end effector mounting assembly movably coupled to the elongated shaft assembly for selective joint movement about the axis.
At the first and second jaws movably coupled to the end effector mounting assembly so that each can move between the open and closed positions with respect to each other and with respect to the shaft axis. Therefore, when a closing motion is applied to the first and second jaws, one of the first jaw and the second jaw is placed in one of the closing positions. The first and second jaws will move at a different closing speed than the closing speed at which the first jaw and the other of the second jaw move to said one of the closing positions. With the chin
The first and second jaws so as to selectively move the closing motion to the first and second jaws and the first and second jaws from the closed position to the open position. A surgical instrument that includes means for selectively adding open motion to the part.
(11) 前記第1及び第2の顎部が前記閉鎖位置のうちの1つにあるときに、前記第1の顎部と前記第2の顎部との間で軸方向に移動するように支持された軸方向可動発射部材を更に備える、実施態様9に記載の外科用器具。
(12) 前記エンドエフェクタ装着アセンブリ上の第1のカムスロットであって、第1の閉鎖ウェッジ部分と第1の開放ウェッジ部分とを画定する、第1のカムスロットと、
前記エンドエフェクタ装着アセンブリ上の第2のカムスロットであって、第2の閉鎖ウェッジ部分と第2の開放ウェッジ部分とを画定し、前記第1の顎部は一対の第1の開放部材と一対の第1の閉鎖部材とを備え、前記第1の開放部材のうちの一方及び前記第1の閉鎖部材のうちの一方は前記第1のカムスロット内に移動可能に受容され、前記第1の開放部材のうちのもう一方及び前記第1の閉鎖部材のうちのもう一方は前記第2のカムスロット内に受容され、前記第2の顎部は一対の第2の開放部材と一対の第2の閉鎖部材とを備え、前記第2の開放部材のうちの一方及び前記第2の閉鎖部材のうちの一方は前記第1のカムスロット内に移動可能に受容され、前記第2の開放部材のうちのもう一方及び前記第2の閉鎖部材のうちのもう一方は前記第2のカムスロット内に移動可能に受容され、前記選択的に加えるための手段は、前記第1の閉鎖部材のうちの前記一方及び前記第2の閉鎖部材のうちの前記一方を前記第1の閉鎖ウェッジ部分に移動可能に進入させ、前記第1の閉鎖部材のうちの前記もう一方及び前記第2の閉鎖部材のうちの前記もう一方を前記第2の閉鎖ウェッジ部分に移動可能に進入させ、それによって、前記閉鎖位置のうちの1つへと互いに向かって前記第1及び第2の顎部を移動させるために、第1の方向に前記第1及び第2の顎部を移動させるように構成され、前記選択的に加えるための手段は、前記第1の開放部材のうちの前記一方及び前記第2の開放部材のうちの前記一方を前記第1の開放ウェッジ部分の中に移動させ、前記第1の開放部材のうちの前記もう一方及び前記第2の開放部材のうちの前記もう一方を前記第2の開放ウェッジ部分の中に移動させ、それによって、前記開放位置へと互いから離して前記第1及び第2の顎部を移動させるために、第2の方向に前記第1及び第2の顎部を移動させるように更に構成されている、第2のカムスロットと、を更に備える、実施態様10に記載の外科用器具。
(13) 前記第1のカムスロットは、前記エンドエフェクタ装着アセンブリに結合される第1のカムプレートに形成され、前記第2のカムスロットは、前記エンドエフェクタ装着アセンブリに結合される第2のカムプレートに形成されている、実施態様12に記載の外科用器具。
(14) 前記選択的に加えるための手段は、前記閉鎖及び開放モーションが加えられたことに反応して軸方向に移動可能であるエンドエフェクタ閉鎖スリーブを含み、前記エンドエフェクタ閉鎖スリーブは、
前記エンドエフェクタ閉鎖スリーブが前記第2の方向に移動されるときに動作可能に接触するための、前記第1の開放部材のうちの前記一方及び前記第2の開放部材のうちの前記一方に対応する第1の開放タブと、
前記エンドエフェクタ閉鎖スリーブが前記第2の方向に移動されるときに動作可能に接触するための、前記第1の開放部材のうちの前記もう一方及び前記第2の開放部材のうちの前記もう一方に対応する第2の開放タブと、を備える、実施態様10に記載の外科用器具。
(15) 前記第1の顎部及び前記第2の顎部の一方は、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備え、前記第1の顎部及び前記第2の顎部のもう一方はアンビルを備える、実施態様10に記載の外科用器具。
(11) When the first and second jaws are in one of the closed positions, the first and second jaws are moved axially between the first jaw and the second jaw. The surgical instrument according to embodiment 9, further comprising a supported axially movable launch member.
(12) A first cam slot on the end effector mounting assembly, which defines a first closed wedge portion and a first open wedge portion.
A second cam slot on the end effector mounting assembly that defines a second closed wedge portion and a second open wedge portion, the first jaw portion being paired with a pair of first open members. One of the first opening members and one of the first closing members are movably received in the first cam slot and the first closing member is provided. The other of the opening members and the other of the first closing members are received in the second cam slot, and the second jaw is paired with a pair of second opening members and a pair of second. One of the second opening members and one of the second closing members are movably received in the first cam slot of the second opening member. The other of them and the other of the second closing members are movably received in the second cam slot, and the means for selectively adding is the first closing member of the first closing member. The one and the one of the second closing members are movably entered into the first closing wedge portion, and the other of the first closing members and the second closing member To move the other of the first and second jaws into the second closed wedge portion movably, thereby moving the first and second jaws towards one of the closed positions. The means for selectively adding the first and second jaw portions are configured to move in the first direction, and the means for selectively adding the first and second jaw portions is one of the first opening members and the second opening member. One of the above is moved into the first opening wedge portion, and the other of the first opening members and the other of the second opening members are opened of the second opening. The first and second jaws are moved in a second direction in order to move them into the wedge portion, thereby moving the first and second jaws away from each other to the open position. 10. The surgical instrument according to
(13) The first cam slot is formed in a first cam plate coupled to the end effector mounting assembly, and the second cam slot is a second cam coupled to the end effector mounting assembly. The surgical instrument according to embodiment 12, which is formed on a plate.
(14) The means for selectively adding includes an end effector closing sleeve that is axially movable in response to the closing and opening motion being applied, the end effector closing sleeve.
Corresponds to said one of the first opening members and one of the second opening members for operably contacting the end effector closing sleeve when moved in the second direction. The first open tab to do
The other of the first opening members and the other of the second opening members for operably contacting when the end effector closing sleeve is moved in the second direction. The surgical instrument according to
(15) One of the first jaw and the second jaw comprises an elongated channel configured to operably support a surgical staple cartridge therein, the first jaw and the second jaw. The surgical instrument according to
(16) 前記第1及び第2の顎部が前記閉鎖位置のうちの1つにあるときに、前記第1の顎部と前記第2の顎部との間で軸方向に移動するように支持される発射部材を更に備える、実施態様15に記載の外科用器具。
(17) 外科用器具であって、
開放位置と閉鎖位置との間で選択的に枢動移動するように互いに対して枢動的に支持される第1の顎部及び第2の顎部と、
閉鎖及び開放モーションが加えられたことに反応して軸方向に移動可能である閉鎖部材であって、少なくとも2つの内向き延出開放タブを含み、前記内向き延出開放タブは、前記第1の顎部及び前記第2の顎部の少なくとも一方を前記開放位置へ移動させるために、前記開放モーションが前記閉鎖部材に加えられると、前記第1の顎部及び前記第2の顎部の少なくとも一方の対応する部分に動作可能に係合するように構成されている、閉鎖部材と、を備える、外科用器具。
(18) 前記少なくとも2つの内向き延出開放タブの少なくとも一方は、前記閉鎖部材内に一体的に形成されている、実施態様17に記載の外科用器具。
(19) 前記少なくとも2つの内向き延出開放タブの各々は、前記閉鎖部材に着脱可能に固定されている、実施態様17に記載の外科用器具。
(20) 前記第1の顎部及び前記第2の顎部の一方は、外科用ステープルカートリッジを中に動作可能に支持するように構成された細長チャネルを備え、前記第1の顎部及び前記第2の顎部のもう一方はアンビルを備える、実施態様17に記載の外科用器具。
(16) When the first and second jaws are in one of the closed positions, the first and second jaws are axially moved between the first jaw and the second jaw. The surgical instrument according to embodiment 15, further comprising a supported launching member.
(17) Surgical instrument
A first jaw and a second jaw that are pivotally supported against each other for selective pivotal movement between the open and closed positions.
A closing member that is axially movable in response to a closing and opening motion, including at least two inward extending open tabs, wherein the inward extending opening tab is the first. When the opening motion is applied to the closing member in order to move at least one of the jaw and the second jaw to the opening position, at least one of the first jaw and the second jaw A surgical instrument comprising a closing member, which is configured to operably engage one corresponding portion.
(18) The surgical instrument according to embodiment 17, wherein at least one of the at least two inwardly extending open tabs is integrally formed within the closing member.
(19) The surgical instrument according to embodiment 17, wherein each of the at least two inwardly extending open tabs is detachably fixed to the closing member.
(20) One of the first jaw and the second jaw comprises an elongated channel configured to operably support a surgical staple cartridge therein, the first jaw and the second jaw. The surgical instrument according to embodiment 17, wherein the other side of the second jaw comprises an anvil.
Claims (8)
シャフト軸線を規定する細長シャフトアセンブリと、
前記シャフト軸線を横断する関節運動軸線を中心として選択的に関節運動するように前記細長シャフトアセンブリに移動可能に結合されたエンドエフェクタ装着アセンブリと、
各々が互いに対してまた前記シャフト軸線に対して、共通の枢動軸線を中心として開放位置と閉鎖位置との間で移動可能となるように、前記エンドエフェクタ装着アセンブリに移動可能に結合された第1及び第2の顎部であって、前記第1の顎部は第1の点を備え、前記第2の顎部は第2の点を備え、前記第1及び第2の点は前記シャフト軸線に対して垂直である共通の軸線に沿って位置し、前記第1の点は、前記第1の顎部が前記開放位置にあるときの前記シャフト軸線からの第1の距離であり、前記第2の点は、前記第2の顎部が前記開放位置にあるときの前記シャフト軸線からの第2の距離であり、前記第2の距離は前記第1の距離とは異なる、第1及び第2の顎部と、
前記開放位置へと互いから離して前記第1及び第2の顎部を付勢するための手段と、
前記閉鎖位置へと互いに向かって前記第1及び第2の顎部を移動させるように前記第1及び第2の顎部に閉鎖モーションを加えるための手段と、を備え、
前記閉鎖モーションを加えるための手段は、軸方向可動エンドエフェクタ閉鎖スリーブを含み、前記軸方向可動エンドエフェクタ閉鎖スリーブは、前記軸方向可動エンドエフェクタ閉鎖スリーブが第1の方向に軸方向に移動されるときに、前記第1の顎部の一部分と前記第2の顎部の一部分とに同時に係合するように構成されている、外科用器具。 It ’s a surgical instrument,
An elongated shaft assembly that defines the shaft axis,
Joint movement across the shaft axis An end effector mounting assembly movably coupled to the elongated shaft assembly for selective joint movement about the axis.
A second movably coupled to the end effector mounting assembly such that each is movable between an open position and a closed position about a common pivot axis with respect to each other and with respect to the shaft axis. The first and second jaws, the first jaw comprising a first point, the second jaw comprising a second point, the first and second points comprising the shaft. Located along a common axis that is perpendicular to the axis, the first point is the first distance from the shaft axis when the first jaw is in the open position. The second point is the second distance from the shaft axis when the second jaw is in the open position, and the second distance is different from the first distance, the first and The second chin and
Means for urging the first and second jaws away from each other to the open position, and
E Bei and means for applying a closing motion to said first and second jaw portions to move the first and second jaws towards each other to the closed position,
The means for applying the closing motion includes an axially movable end effector closing sleeve, wherein the axially movable end effector closing sleeve is axially moved by the axially movable end effector closing sleeve in a first direction. A surgical instrument that is sometimes configured to simultaneously engage a portion of the first jaw and a portion of the second jaw .
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/742,941 | 2015-06-18 | ||
| US14/742,941 US10052102B2 (en) | 2015-06-18 | 2015-06-18 | Surgical end effectors with dual cam actuated jaw closing features |
| PCT/US2016/037318 WO2016205166A2 (en) | 2015-06-18 | 2016-06-14 | Surgical end effectors with dual cam actuated jaw closing features |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018518291A JP2018518291A (en) | 2018-07-12 |
| JP6808655B2 true JP6808655B2 (en) | 2021-01-06 |
Family
ID=61892851
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017565230A Active JP6808655B2 (en) | 2015-06-18 | 2016-06-14 | Surgical end effector with double cam actuated jaw closure mechanism |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6808655B2 (en) |
| CN (1) | CN107920820B (en) |
| BR (1) | BR112017027340B1 (en) |
| RU (1) | RU2720296C2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020110281A1 (en) * | 2018-11-30 | 2020-06-04 | オリンパス株式会社 | Gripping mechanism |
| US11751872B2 (en) * | 2019-02-19 | 2023-09-12 | Cilag Gmbh International | Insertable deactivator element for surgical stapler lockouts |
| CN114098867B (en) * | 2020-08-28 | 2024-01-16 | 江苏风和医疗器材股份有限公司 | Surgical instrument |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2109539T3 (en) * | 1993-04-20 | 1998-01-16 | United States Surgical Corp | SURGICAL STAPLER. |
| RU2110221C1 (en) * | 1993-10-01 | 1998-05-10 | Тофик Аскерович Султанов | Surgical suture appliance for endoscopic operations |
| US5662667A (en) * | 1995-09-19 | 1997-09-02 | Ethicon Endo-Surgery, Inc. | Surgical clamping mechanism |
| WO2004023976A2 (en) * | 2002-09-13 | 2004-03-25 | Damage Control Surgical Technologies, Inc. | Method and apparatus for vascular and visceral clipping |
| JP4664909B2 (en) * | 2003-06-17 | 2011-04-06 | タイコ ヘルスケア グループ リミテッド パートナーシップ | Surgical stapling device |
| US7494039B2 (en) * | 2003-06-17 | 2009-02-24 | Tyco Healthcare Group Lp | Surgical stapling device |
| US7651017B2 (en) * | 2005-11-23 | 2010-01-26 | Ethicon Endo-Surgery, Inc. | Surgical stapler with a bendable end effector |
| CN101810497B (en) * | 2009-12-08 | 2011-08-31 | 苏州天臣国际医疗科技有限公司 | Wedge-shaped sewing device |
| RU2437622C2 (en) * | 2009-12-17 | 2011-12-27 | Борис Иванович Леонов | Surgical sewer for endoscopic operations |
| US20120080498A1 (en) * | 2010-09-30 | 2012-04-05 | Ethicon Endo-Surgery, Inc. | Curved end effector for a stapling instrument |
| US20140005702A1 (en) * | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| AU2013206807A1 (en) * | 2012-07-18 | 2014-02-06 | Covidien Lp | Apparatus for endoscopic procedures |
-
2016
- 2016-06-14 RU RU2018101623A patent/RU2720296C2/en active
- 2016-06-14 CN CN201680035807.6A patent/CN107920820B/en active Active
- 2016-06-14 BR BR112017027340-3A patent/BR112017027340B1/en active IP Right Grant
- 2016-06-14 JP JP2017565230A patent/JP6808655B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| RU2018101623A3 (en) | 2019-10-31 |
| BR112017027340A2 (en) | 2018-09-04 |
| CN107920820A (en) | 2018-04-17 |
| JP2018518291A (en) | 2018-07-12 |
| RU2018101623A (en) | 2019-07-18 |
| BR112017027340B1 (en) | 2022-12-06 |
| CN107920820B (en) | 2021-04-23 |
| RU2720296C2 (en) | 2020-04-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6873928B2 (en) | Surgical end effector with open jaw configuration | |
| JP6896765B2 (en) | Range of motion surgical instruments with a single joint link configuration | |
| JP6911054B2 (en) | Surgical instruments with asymmetric joint composition | |
| JP6882204B2 (en) | Dual joint motion drive system configuration for joint motion surgical instruments | |
| JP6862364B2 (en) | Push / pull joint motion drive system for joint motion surgical instruments | |
| JP6808655B2 (en) | Surgical end effector with double cam actuated jaw closure mechanism | |
| JP6824911B2 (en) | Joint motion surgical instrument with composite launch beam structure with central launch support member for joint support | |
| JP6779922B2 (en) | Movable launch beam support configuration for articulated surgical instruments | |
| JP6961496B2 (en) | Surgical staple fastening device with lockout configuration to prevent activation of the launch system when the cartridge is used or missing | |
| JP6896766B2 (en) | Surgical instrument with closed stroke reduction configuration | |
| JP6907237B2 (en) | Surgical instrument with tensioning configuration for cable-driven range of motion system | |
| JP2021121336A (en) | Surgical instrument | |
| JP6965280B2 (en) | Surgical instrument with range-of-motion end effector that can be translated in the axial direction | |
| JP6900402B2 (en) | Range of motion surgical instrument with off-axis firing beam configuration | |
| JP6891196B2 (en) | Surgical instruments with end effectors that are highly articulated for elongated shaft assemblies | |
| JP6932725B2 (en) | Surgical instrument with multi-link range of motion configuration |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190614 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6808655 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |