JP6781068B2 - Work machine control system, work machine and work machine control method - Google Patents
Work machine control system, work machine and work machine control method Download PDFInfo
- Publication number
- JP6781068B2 JP6781068B2 JP2017030337A JP2017030337A JP6781068B2 JP 6781068 B2 JP6781068 B2 JP 6781068B2 JP 2017030337 A JP2017030337 A JP 2017030337A JP 2017030337 A JP2017030337 A JP 2017030337A JP 6781068 B2 JP6781068 B2 JP 6781068B2
- Authority
- JP
- Japan
- Prior art keywords
- bucket
- tilt
- control
- target
- work machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 14
- 238000010276 construction Methods 0.000 claims description 236
- 238000004364 calculation method Methods 0.000 claims description 52
- 238000001514 detection method Methods 0.000 description 20
- 238000010586 diagram Methods 0.000 description 20
- 239000003921 oil Substances 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- 230000033001 locomotion Effects 0.000 description 7
- 230000007935 neutral effect Effects 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000010720 hydraulic oil Substances 0.000 description 3
- 238000012876 topography Methods 0.000 description 2
- 238000009412 basement excavation Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000009430 construction management Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000003628 erosive effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images






























Landscapes
- Operation Control Of Excavators (AREA)
Description
本発明は、作業機械の制御システム、作業機械及び作業機械の制御方法に関する。 The present invention relates to a work machine control system, a work machine, and a work machine control method.
特許文献1に開示されているような、チルト式バケットを作業具として有する作業機を備える作業機械が知られている。
A work machine including a work machine having a tilt-type bucket as a work tool as disclosed in
作業機械の制御に係る技術分野において、作業機械のオペレータによる操作レバーの操作に介入して、施工対象の目標形状を示す目標施工形状にバケットが侵入しないようにバケットを停止させたり、目標施工形状にバケットが侵入した場合には目標施工形状に侵入しない位置までバケットを移動させたりする、作業機制御が知られている。作業機制御が実行されることにより、バケットが目標施工形状を超えてしまうことが抑制され、目標施工形状に沿った施工が実現される。 In the technical field related to the control of work machines, the bucket is stopped or the target construction shape is stopped so that the bucket does not enter the target construction shape indicating the target shape of the construction target by intervening in the operation of the operation lever by the operator of the work machine. Work equipment control is known in which the bucket is moved to a position where it does not invade the target construction shape when the bucket invades. By executing the work machine control, it is suppressed that the bucket exceeds the target construction shape, and the construction according to the target construction shape is realized.
例えば、法面の肩部等は2つの面が接続しているが、このような部分を施工する場合、バケットをチルト動作させることによって一方の面にバケットの刃先を位置決めしたいという要請がある。法面の肩部等は、2つの面が接続する部分で目標施工形状が不連続になる。このように、目標施工形状に不連続な部分があると、不連続である部分に対して、バケットを位置決めしたい面の反対側の面までバケットがチルト動作することがある。その結果、作業具であるバケットを位置決めしたい目標施工形状に位置決めできない可能性がある。 For example, two surfaces are connected to a shoulder portion of a slope or the like, but when constructing such a portion, there is a request that the cutting edge of the bucket should be positioned on one surface by tilting the bucket. The target construction shape is discontinuous at the part where the two surfaces are connected, such as the shoulder of the slope. As described above, when there is a discontinuous portion in the target construction shape, the bucket may tilt to the surface opposite to the surface on which the bucket is to be positioned with respect to the discontinuous portion. As a result, there is a possibility that the bucket, which is a work tool, cannot be positioned in the target construction shape to be positioned.
本発明の態様は、作業機械の施工対象の目標施工形状に作業具を位置決めできるようにすることを目的とする。 An object of the present invention is to enable the work tool to be positioned in a target construction shape of a work machine to be constructed.
本発明の第1の態様に従えば、軸線を中心に回転する作業具を有する作業機を備える作業機械を制御する作業機械の制御システムであって、前記作業機械の施工対象の目標形状を示す目標施工形状を生成する目標施工形状生成部と、前記作業具の回転を制御する際の目標となる形状である制御目標形状を前記目標施工形状から求め、かつ前記制御目標形状を延長した延長目標形状を求める目標形状演算部と、前記作業具と前記制御目標形状及び前記延長目標形状との距離に基づいて、前記軸線を中心とする前記作業具の回転を制御する作業機制御部と、を含む、作業機械の制御システムが提供される。 According to the first aspect of the present invention, it is a control system of a work machine that controls a work machine including a work machine having a work tool that rotates about an axis, and indicates a target shape of a construction target of the work machine. A target construction shape generating unit that generates a target construction shape and a control target shape that is a target shape when controlling the rotation of the work tool are obtained from the target construction shape, and an extension target that extends the control target shape. A target shape calculation unit for obtaining a shape, and a work machine control unit that controls rotation of the work tool around the axis based on the distance between the work tool, the control target shape, and the extension target shape. A control system for work machines, including, is provided.
本発明の第2の態様に従えば、第1の態様において、前記延長目標形状を、前記作業機制御部が前記作業具の回転を制御する際の目標とするか目標としないかを決定する決定部を有し、前記作業機制御部は、前記決定部によって、前記延長目標形状が、前記作業機制御部が前記作業具の回転を制御する際の目標とされた場合には、前記作業具と前記制御目標形状及び前記延長目標形状との距離に基づいて、前記軸線を中心とする前記作業具の回転を制御し、前記決定部によって、前記延長目標形状が、前記作業機制御部が前記作業具の回転を制御する際の目標とされない場合には、前記作業具と前記制御目標形状との距離に基づいて、前記軸線を中心とする前記作業具の回転を制御する作業機械の制御システムが提供される。 According to the second aspect of the present invention, in the first aspect, it is determined whether or not the extension target shape is a target when the work equipment control unit controls the rotation of the work tool. The work machine control unit has a determination unit, and when the determination unit sets the extension target shape as a target when the work machine control unit controls the rotation of the work tool, the work The rotation of the work tool around the axis is controlled based on the distance between the tool and the control target shape and the extension target shape, and the extension target shape is determined by the determination unit by the work machine control unit. When it is not a target when controlling the rotation of the work tool, control of the work machine that controls the rotation of the work tool around the axis based on the distance between the work tool and the control target shape. The system is provided.
本発明の第3の態様に従えば、第2の態様において、前記決定部は、前記作業具と目標施工形状との重なり、前記作業具と目標施工形状に対応する前記停止地形との距離、前記作業具の姿勢及び前記作業機の操作状態に基づいて、前記延長目標形状を、前記作業具を停止させる際の目標とするか目標としないかを決定する作業機械の制御装置が提供される。 According to the third aspect of the present invention, in the second aspect, the determination unit overlaps the work tool with the target construction shape, and the distance between the work tool and the stop terrain corresponding to the target construction shape. Provided is a control device for a work machine that determines whether or not the extension target shape is a target when the work tool is stopped, based on the posture of the work tool and the operating state of the work machine. ..
本発明の第4の態様に従えば、第3の態様において、前記決定部は、前記作業具を停止させる際の目標を前記延長目標形状とする決定をする場合の前記重なりの大きさを、目標としない決定をする場合の前記重なりの大きさよりも大きくする作業機械の制御システムが提供される。 According to the fourth aspect of the present invention, in the third aspect, the determination unit determines the size of the overlap when determining that the target when stopping the work tool is the extension target shape. A control system for a work machine is provided in which the size of the overlap is larger than the size of the overlap when making a non-target decision.
本発明の第5の態様に従えば、第1の態様から第4の態様のいずれか1つにおいて、前記作業具に設定された規定点の位置データを求める規定点位置データ演算部と、前記規定点を通り前記軸線と直交する動作平面を求める動作平面算出部と、を有し、前記停止地形算出部は、前記目標施工形状と前記動作平面とが交差する部分を前記制御目標形状とし、前記制御目標形状と平行に前記制御目標形状を延長した部分を前記延長目標形状とする作業機械の制御システムが提供される。 According to the fifth aspect of the present invention, in any one of the first to fourth aspects, the defined point position data calculation unit for obtaining the position data of the defined point set in the work tool, and the above-mentioned It has an operation plane calculation unit that obtains an operation plane that passes through a specified point and is orthogonal to the axis line, and the stop terrain calculation unit sets a portion where the target construction shape and the operation plane intersect as the control target shape. Provided is a control system for a working machine in which a portion obtained by extending the control target shape in parallel with the control target shape is used as the extension target shape.
本発明の第6の態様に従えば、上部旋回体と、前記上部旋回体を支持する下部走行体と、第1の軸を中心に回転するブームと第2の軸を中心に回転するアームと第3の軸を中心に回転するバケットとを含み、前記上部旋回体に支持される作業機と、第1の態様から第5の態様のいずれか1つに係る作業機械の制御システムと、を含み、前記作業具は前記バケット、前記アーム、前記ブーム及び前記上部旋回体の少なくとも1つである作業機械が提供される。 According to the sixth aspect of the present invention, the upper swing body, the lower traveling body that supports the upper swing body, the boom that rotates around the first axis, and the arm that rotates around the second axis. A work machine supported by the upper swing body, including a bucket that rotates about a third axis, and a control system for the work machine according to any one of the first to fifth aspects. The working tool is provided with a working machine which is at least one of the bucket, the arm, the boom and the upper swing body.
本発明の第7の態様に従えば、第6の態様において、前記作業具は前記バケットであり、前記軸線は前記第3の軸と直交する作業機械が提供される。 According to a seventh aspect of the present invention, in the sixth aspect, a work machine is provided in which the work tool is the bucket and the axis line is orthogonal to the third axis.
本発明の第8の態様に従えば、軸線を中心に回転する作業具を有する作業機を備える作業機械を制御する作業機械の制御方法であって、前記作業機械の施工対象の目標形状を示す目標施工形状を生成することと、前記作業具の回転を制御する際の目標となる形状である制御目標形状を前記目標施工形状から求め、かつ前記制御目標形状を延長した延長目標形状を求めることと、前記作業具と前記制御目標形状及び前記延長目標形状との距離に基づいて、前記軸線を中心とする前記作業具の回転を制御することと、を含む、作業機械の制御方法が提供される。 According to the eighth aspect of the present invention, it is a control method of a work machine for controlling a work machine including a work machine having a work tool that rotates about an axis, and indicates a target shape of a construction target of the work machine. To generate a target construction shape, to obtain a control target shape which is a target shape when controlling the rotation of the work tool from the target construction shape, and to obtain an extension target shape which is an extension of the control target shape. A method for controlling a work machine is provided, which includes controlling the rotation of the work tool about the axis based on the distance between the work tool and the control target shape and the extension target shape. To.
本発明の態様によれば、作業機械の施工対象の目標施工形状に作業具を位置決めできる。 According to the aspect of the present invention, the work tool can be positioned at the target construction shape of the work machine to be constructed.
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。 An embodiment (embodiment) for carrying out the present invention will be described in detail with reference to the drawings.
以下の説明においては、グローバル座標系(Xg−Yg−Zg座標系)及び車体座標系(X−Y−Z座標系)を設定して各部の位置関係について説明する。グローバル座標系とは、全地球測位システム(Global Positioning System:GPS)のような全地球航法衛星システム(Global Navigation Satellite System:GNSS)により規定される絶対位置を示す座標系である。車体座標系とは、作業機械の基準位置に対する相対位置を示す座標系である。 In the following description, the global coordinate system (Xg-Yg-Zg coordinate system) and the vehicle body coordinate system (XYZ coordinate system) are set and the positional relationship of each part is described. The global coordinate system is a coordinate system that indicates an absolute position defined by a global navigation satellite system (GNSS) such as the Global Positioning System (GPS). The vehicle body coordinate system is a coordinate system that indicates a position relative to a reference position of a work machine.
本実施形態において、停止制御は、作業機と作業機械の施工対象の目標施工形状との距離に基づいて、作業機の少なくとも一部の動作を停止させる制御をいう。例えば、作業機が有するバケットがチルト方式のバケットである場合、停止制御は、バケットと目標施工形状との距離に基づいて、バケットのチルト動作を停止させる制御が挙げられる。バケットのチルト動作を停止させる停止制御を適宜、チルト停止制御と称する。 In the present embodiment, the stop control refers to a control for stopping the operation of at least a part of the work machine based on the distance between the work machine and the target construction shape of the work machine to be constructed. For example, when the bucket of the working machine is a tilt type bucket, the stop control includes a control of stopping the tilt operation of the bucket based on the distance between the bucket and the target construction shape. The stop control for stopping the tilt operation of the bucket is appropriately referred to as tilt stop control.
[作業機械]
図1は、本実施形態に係る作業機械の一例を示す斜視図である。本実施形態においては、作業機械が油圧ショベル100である例について説明する。作業機械は、油圧ショベル100に限定されない。
[Working machine]
FIG. 1 is a perspective view showing an example of a work machine according to the present embodiment. In this embodiment, an example in which the work machine is a
図1に示されるように、油圧ショベル100は、油圧により動作する作業機1と、作業機1を支持する車体である上部旋回体2と、上部旋回体2を支持する走行装置である下部走行体3と、作業機1を操作するための操作装置30と、作業機1を制御する制御装置50とを備える。上部旋回体2は、下部走行体3に支持された状態で旋回軸RXを中心に旋回可能である。
As shown in FIG. 1, the
上部旋回体2は、オペレータが搭乗する運転室4と、エンジン及び油圧ポンプが収容される機械室5とを有する。運転室4は、オペレータが着座する運転席4Sを有する。機械室5は、運転室4の後方に配置される。
The
下部走行体3は、一対の履帯3Cを有する。履帯3Cの回転により、油圧ショベル100が走行する。下部走行体3がタイヤを有してもよい。
The
作業機1は、上部旋回体2に支持される。作業機1は、ブームピンを介して上部旋回体2に連結されるブーム6と、アームピンを介してブーム6に連結されるアーム7と、バケットピン及びチルトピンを介してアーム7に連結されるバケット8とを有する。バケット8は、刃8Cを有する。刃8Cは、バケット8の先端、すなわちバケットピンで連結されている部分から離れた部分に設けられた、板状の部材である。刃8Cの刃先9は、刃8Cの先端部であり、本実施形態では直線状の部分である。バケット8に複数の凸形状の刃が設けられている場合、刃先9は、凸形状の刃の先端部となる。
The working
ブーム6は、第1の軸であるブーム軸AX1を中心に上部旋回体2に対して回転可能である。アーム7は、第2の軸であるアーム軸AX2を中心にブーム6に対して回転可能である。バケット8は、第3の軸であるバケット軸AX3及びバケット軸AX3に平行な軸と直交する軸線であるチルト軸AX4のそれぞれを中心にアーム7に対して回転可能である。バケット軸AX3とチルト軸AX4とは互いに交差しない。
The
ブーム軸AX1とアーム軸AX2とバケット軸AX3とは平行である。ブーム軸AX1、アーム軸AX2及びバケット軸AX3と旋回軸RXと平行な軸とは直交する。ブーム軸AX1、アーム軸AX2及びバケット軸AX3は、車体座標系のY軸と平行である。旋回軸RXは、車体座標系のZ軸と平行である。ブーム軸AX1、アーム軸AX2及びバケット軸AX3と平行な方向は、上部旋回体2の車幅方向を示す。旋回軸RXと平行な方向は、上部旋回体2の上下方向を示す。ブーム軸AX1、アーム軸AX2、バケット軸AX3及び旋回軸RXの両方と直交する方向は、上部旋回体2の前後方向を示す。運転席4Sを基準として作業機1が存在する方向が前方である。
The boom shaft AX1, the arm shaft AX2, and the bucket shaft AX3 are parallel to each other. The boom shaft AX1, the arm shaft AX2, the bucket shaft AX3, and the shaft parallel to the swivel shaft RX are orthogonal to each other. The boom axis AX1, the arm axis AX2, and the bucket axis AX3 are parallel to the Y axis of the vehicle body coordinate system. The turning axis RX is parallel to the Z axis of the vehicle body coordinate system. The direction parallel to the boom shaft AX1, the arm shaft AX2, and the bucket shaft AX3 indicates the vehicle width direction of the
作業機1は、油圧シリンダ10が発生する力により動作する。油圧シリンダ10は、ブーム6を作動させるブームシリンダ11と、アーム7を動作させるアームシリンダ12と、バケット8を作動させるバケットシリンダ13及びチルトシリンダ14とを含む。
The
作業機1は、ブームストロークセンサ16と、アームストロークセンサ17と、バケットストロークセンサ18と、チルトストロークセンサ19とを有する。ブームストロークセンサ16は、ブームシリンダ11の動作量を示すブームストロークを検出する。アームストロークセンサ17は、アームシリンダ12の動作量を示すアームストロークを検出する。バケットストロークセンサ18は、バケットシリンダ13の動作量を示すバケットストロークを検出する。チルトストロークセンサ19は、チルトシリンダ14の動作量を示すチルトストロークを検出する。
The
操作装置30は、運転室4に配置される。操作装置30は、油圧ショベル100のオペレータに操作される操作部材を含む。オペレータは、操作装置30を操作して、作業機1を動作させる。本実施形態において、操作装置30は、左操作レバー30L及び右操作レバー30Rと、チルト操作レバー30Tと、操作ペダル30Fとを含む。
The
中立位置にある右操作レバー30Rが前方に操作されると、ブーム6が下げ動作し、後方に操作されると、ブーム6が上げ動作する。中立位置にある右操作レバー30Rが右方に操作されると、バケット8がダンプ動作し、左方に操作されると、バケット8が掻き込み動作する。
When the
中立位置にある左操作レバー30Lが前方に操作されると、アーム7が伸ばし動作し、後方に操作されると、アーム7が掻き込み動作する。中立位置にある左操作レバー30Lが右方に操作されると、上部旋回体2が右旋回し、左方に操作されると、上部旋回体2が左旋回する。
When the
なお、右操作レバー30R及び左操作レバー30Lの操作方向と、作業機1の動作方向及び上部旋回体2の旋回方向との関係は、上述の関係でなくてもよい。
The relationship between the operating directions of the
制御装置50は、コンピュータシステムを含む。制御装置50は、CPU(Central Processing Unit)のようなプロセッサと、ROM(Read Only Memory)のような不揮発性メモリ及びRAM(Random Access Memory)のような揮発性メモリを含む記憶装置と、入出力インターフェース装置とを有する。
The
[バケット]
図2は、本実施形態に係るバケット8の一例を示す側断面図である。図3は、本実施形態に係るバケット8の一例を示す正面図である。本実施形態において、バケット8は、チルト式バケットである。チルト式バケットは、軸線であるチルト軸AX4を中心として動作、例えば回転するバケットである。本実施形態において、軸線を中心として回転する部材は、バケット8である。
[bucket]
FIG. 2 is a side sectional view showing an example of the
バケット8はチルト式バケットに限定されない。バケット8は、例えば、ローテートバケットであってもよい。ローテートバケットは、バケット軸AX3と垂直に交わる軸線の周りを回転するバケットである。
The
図2及び図3に示されるように、バケット8は、バケットピン8Bを介してアーム7に回転可能に連結される。また、バケット8は、チルトピン8Tを介してアーム7に回転可能に支持される。バケット8は、接続部材90を介して、アーム7の先端部に接続される。バケットピン8Bは、アーム7と接続部材90とを連結する。チルトピン8Tは、接続部材90とバケット8とを連結する。バケット8は、接続部材90を介して、アーム7に回転可能に接続される。
As shown in FIGS. 2 and 3, the
バケット8は、底板81と、背板82と、上板83と、側板84と、側板85とを含む。バケット8は、上板83の上部に設けられたブラケット87を有する。ブラケット87は、上板83の前後位置に設置される。ブラケット87は、接続部材90及びチルトピン8Tと連結される。
The
接続部材90は、プレート部材91と、プレート部材91の上面に設けられたブラケット92と、プレート部材91の下面に設けられたブラケット93とを有する。ブラケット92は、アーム7及び第2リンクピン95Pと連結される。ブラケット93はブラケット87の上部に設置され、チルトピン8T及びブラケット87と連結される。
The connecting
バケットピン8Bは、接続部材90のブラケット92とアーム7の先端部とを連結する。チルトピン8Tは、接続部材90のブラケット93とバケット8のブラケット87とを連結する。接続部材90及びバケット8は、アーム7に対してバケット軸AX3を中心に回転可能である。バケット8は、接続部材90に対してチルト軸AX4を中心に回転可能である。
The
作業機1は、第1リンクピン94Pを介してアーム7に回転可能に接続される第1リンク部材94と、第2リンクピン95Pを介してブラケット92に回転可能に接続される第2リンク部材95とを有する。第1リンク部材94の基端部が第1リンクピン94Pを介してアーム7に接続される。第2リンク部材95の基端部が第2リンクピン95Pを介してブラケット92に接続される。第1リンク部材94の先端部と第2リンク部材95の先端部とが、バケットシリンダトップピン96を介して連結される。
The
バケットシリンダ13の先端部は、バケットシリンダトップピン96を介して、第1リンク部材94の先端部及び第2リンク部材95の先端部と回転可能に接続される。バケットシリンダ13が伸縮すると、接続部材90はバケット8と共にバケット軸AX3を中心に回転する。
The tip of the
チルトシリンダ14は、接続部材90に設けられたブラケット97及びバケット8に設けられたブラケット88のそれぞれに接続される。チルトシリンダ14のロッドがピンを介してブラケット97に接続される。チルトシリンダ14の本体部がピンを介してブラケット88に接続される。チルトシリンダ14が伸縮すると、バケット8はチルト軸AX4を中心に回転する。チルトシリンダ14の接続の構造は一例であって、本実施形態の構造には限定されない。
The
このように、バケット8は、バケットシリンダ13が動作することにより、バケット軸AX3を中心に回転する。バケット8は、チルトシリンダ14が動作することにより、チルト軸AX4を中心に回転する。バケット8がバケット軸AX3を中心に回転すると、チルトピン8Tはバケット8と共に回転する。
In this way, the
[検出システム]
次に、油圧ショベル100の検出システム400について説明する。図4は、油圧ショベル100を模式的に示す側面図である。図5は、油圧ショベル100を模式的に示す背面図である。図6は、油圧ショベル100を模式的に示す平面図である。図7は、バケット8を模式的に示す側面図である。図8は、バケット8を模式的に示す正面図である。
[Detection system]
Next, the
図4、図5及び図6に示されるように、検出システム400は、上部旋回体2の位置を検出する位置検出装置20と、作業機1の角度を検出する作業機角度検出装置24とを有する。位置検出装置20は、上部旋回体2の位置を検出する車体位置演算器21と、上部旋回体2の姿勢を検出する姿勢演算器22と、上部旋回体2の方位を検出する方位演算器23とを含む。
As shown in FIGS. 4, 5 and 6, the
車体位置演算器21は、GPS受信機を含む。車体位置演算器21は、上部旋回体2に設けられる。車体位置演算器21は、グローバル座標系で規定される上部旋回体2の絶対位置Pg、すなわちグローバル座標系(Xg−Yg−Zg)における位置を検出する。上部旋回体2の絶対位置Pgは、Xg軸方向の座標データ、Yg軸方向の座標データ及びZg軸方向の座標データを含む。
The vehicle
上部旋回体2に複数のGPSアンテナ21Aが設けられる。GPSアンテナ21Aは、GPS衛星から電波を受信して、受信した電波に基づいて生成した信号を車体位置演算器21に出力する。車体位置演算器21は、GPSアンテナ21Aから与えられた信号に基づいて、グローバル座標系で規定されるGPSアンテナ21Aが設置されている位置Prを検出する。車体位置演算器21は、GPSアンテナ21Aが設置されている位置Prに基づいて、上部旋回体2の絶対位置Pgを検出する。
A plurality of
GPSアンテナ21Aは、車幅方向に2個、設けられる。車体位置演算器21は、一方のGPSアンテナ21Aが設置されている位置Pra及び他方のGPSアンテナ21Aが設置されている位置Prbのそれぞれを検出する。車体位置演算器21は、位置Praと位置Prbとの少なくとも一方に基づいて演算処理を実行して、上部旋回体2の絶対位置Pgを検出する。本実施形態において、上部旋回体2の絶対位置Pgは、位置Praである。なお、上部旋回体2の絶対位置Pgは、位置Prbでもよいし、位置Praと位置Prbとの間の位置でもよい。
Two
姿勢演算器22は、慣性計測装置(Inertial Measurement Unit:IMU)を含む。姿勢演算器22は、上部旋回体2に設けられる。姿勢演算器22は、グローバル座標系で規定される水平面、すなわちXg−Yg平面に対する上部旋回体2の傾斜角度を検出する。水平面に対する上部旋回体2の傾斜角度は、車幅方向における上部旋回体2の傾斜角度を示すロール角度θ1と、前後方向における上部旋回体2の傾斜角度を示すピッチ角度θ2とを含む。
The attitude calculator 22 includes an inertial measurement unit (IMU). The posture calculator 22 is provided on the
方位演算器23は、一方のGPSアンテナ21Aが設置されている位置Praと他方のGPSアンテナ21Aが設置されている位置Prbとに基づいて、グローバル座標系で規定される基準方位に対する上部旋回体2の方位を検出する。方位演算器23は、位置Praと位置Prbとに基づいて演算処理を実行して、基準方位に対する上部旋回体2の方位を検出する。方位演算器23は、位置Praと位置Prbとを結ぶ直線を求め、求めた直線と基準方位とがなす角度に基づいて、基準方位に対する上部旋回体2の方位を検出する。基準方位に対する上部旋回体2の方位は、基準方位と上部旋回体2の方位とがなす角度を示すヨー角度θ3を含む。
The
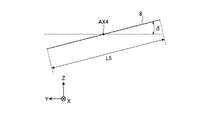
図4、図7及び図8に示されるように、作業機角度検出装置24は、ブームストロークセンサ16で検出されたブームストロークに基づいて、車体座標系のZ軸に対するブーム6の傾斜角度を示すブーム角度αを求める。作業機角度検出装置24は、アームストロークセンサ17で検出されたアームストロークに基づいて、ブーム6に対するアーム7の傾斜角度を示すアーム角度βを求める。作業機角度検出装置24は、バケットストロークセンサ18で検出されたバケットストロークに基づいて、アーム7に対するバケット8の刃先9の傾斜角度を示すバケット角度γを求める。作業機角度検出装置24は、チルトストロークセンサ19で検出されたチルトストロークに基づいて、XY平面に対するバケット8の傾斜角度を示すチルト角度δを求める。作業機角度検出装置24は、ブームストロークセンサ16で検出されたブームストローク、アームストロークセンサ17で検出されたアームストローク、バケットストロークセンサ18で検出されたバケットストローク、及びチルトストロークセンサ19で検出されたチルトストロークに基づいて、XY平面に対するチルト軸AX4の傾斜角度を示すチルト軸角度εを求める。作業機1の傾斜角度は、ストロークセンサ以外の角度センサによる検出であってもよいし、ステレオカメラ及びレーザスキャナ等の光学的な計測手段による検出であってもよい。
As shown in FIGS. 4, 7 and 8, the work equipment
[油圧システム]
図9は、チルトシリンダ14を動作させる油圧システム300の一例を模式的に示す図である。油圧システム300は、作動油を供給する可変容量型のメイン油圧ポンプ31と、パイロット油を供給するパイロット圧ポンプ32と、チルトシリンダ14に対する作動油の供給量を調整する流量制御弁25と、流量制御弁25に作用するパイロット圧を調整する制御弁37A,37B,39と、操作装置30のチルト操作レバー30T及び操作ペダル30Fと、制御装置50とを備える。チルト操作レバー30Tは、左操作レバー30L又は右操作レバー30Rの少なくとも一方に設けられるボタン等である。本実施形態において、操作装置30の操作ペダル30Fは、パイロット圧方式の操作装置である。操作装置30のチルト操作レバー30Tは、電子レバー方式の操作装置である。
[Hydraulic system]
FIG. 9 is a diagram schematically showing an example of a
操作装置30の操作ペダル30Fは、パイロット圧ポンプ32に接続される。操作ペダル30Fとパイロット圧ポンプ32との間には、制御弁39が設けられる。また、操作ペダル30Fは、制御弁37Aから送出されるパイロット油が流れる油路38Aにシャトル弁36Aを介して接続される。また、操作ペダル30Fは、制御弁37Bから送出されるパイロット油が流れる油路38Bにシャトル弁36Bを介して接続される。操作ペダル30Fが操作されることにより、操作ペダル30Fとシャトル弁36Aとの間の油路33Aの圧力、及び操作ペダル30Fとシャトル弁36Bとの間の油路33Bの圧力が調整される。
The
チルト操作レバー30Tが操作されることにより、チルト操作レバー30Tの操作により生成された操作信号が制御装置50に出力される。制御装置50は、チルト操作レバー30Tから出力された操作信号に基づいて制御信号を生成し、制御弁37A,37Bを制御する。制御弁37A,37Bは、電磁比例制御弁である。制御弁37Aは、制御信号に基づいて、油路38Aを開閉する。制御弁37Bは、制御信号に基づいて、油路38Bを開閉する。
By operating the
チルト停止制御を実行しないとき、操作装置30の操作量に基づいて、パイロット圧が調整される。チルト停止制御を実行するとき、制御装置50は、制御弁37A,37B又は制御弁39に制御信号を出力して、パイロット圧を調整する。
When the tilt stop control is not executed, the pilot pressure is adjusted based on the amount of operation of the operating
[制御システム]
図10は、本実施形態に係る作業機械の制御システム200の一例を示す機能ブロック図である。以下において、作業機械の制御システム200を適宜、制御システム200と称する。図10に示されるように、制御システム200は、作業機1を制御する制御装置50と、位置検出装置20と、作業機角度検出装置24と、制御弁37(37A,37B),39と、目標施工データ生成装置70とを備える。
[Control system]
FIG. 10 is a functional block diagram showing an example of the
位置検出装置20は、上部旋回体2の絶対位置Pg、ロール角度θ1及びピッチ角度θ2を含む上部旋回体2の姿勢と、ヨー角度θ3を含む上部旋回体2の方位とを検出する。作業機角度検出装置24は、ブーム角度α、アーム角度β、バケット角度γ、チルト角度δ、及びチルト軸角度εを含む作業機1の角度を検出する。制御弁37(37A,37B)は、チルトシリンダ14に対する作動油の供給量を調整する。
The
制御弁37は、制御装置50からの制御信号に基づいて作動する。目標施工データ生成装置70は、コンピュータシステムを含む。目標施工データ生成装置70は、施工エリアの目標形状である目標地形を示す目標施工データを生成する。目標施工データは、作業機1による施工後に得られる3次元の目標形状を示す。
The
目標施工データ生成装置70は、油圧ショベル100の遠隔地に設けられる。目標施工データ生成装置70は、例えば施工管理施設に設置される。目標施工データ生成装置70と制御装置50とは無線通信可能である。目標施工データ生成装置70で生成された目標施工データは、無線で制御装置50に送信される。
The target construction
目標施工データ生成装置70と制御装置50とが有線で接続され、目標施工データ生成装置70から制御装置50に目標施工データが送信されてもよい。目標施工データ生成装置70が目標施工データを記憶した記録媒体を含み、制御装置50が、記録媒体から目標施工データを読み込み可能な装置を有してもよい。
The target construction
目標施工データ生成装置70は、油圧ショベル100に設けられてもよい。施工を管理する外部の管理装置から目標施工データが有線又は無線で油圧ショベル100の目標施工データ生成装置70に供給され、目標施工データ生成装置70が供給された目標施工データを記憶してもよい。
The target construction
制御装置50は、処理部51と、記憶部52と、入出力部53とを含む。処理部51は、車体位置データ取得部51Aと、作業機角度データ取得部51Bと、候補規定点位置データ演算部51Caと、目標施工形状生成部51Dと、規定点位置データ演算部51Cbと、動作平面演算部51Eと、停止地形演算部51Fと、作業機制御部51Gと、制限速度決定部51Hと、決定部51Jと、を有する。記憶部52は、作業機データを含む油圧ショベル100の諸元データを記憶する。
The
処理部51が有する車体位置データ取得部51A、作業機角度データ取得部51B、候補規定点位置データ演算部51Ca、目標施工形状生成部51D、規定点位置データ演算部51Cb、動作平面演算部51E、停止地形演算部51F、作業機制御部51G、制限速度決定部51H及び決定部51Jのそれぞれの機能は、制御装置50のプロセッサによって実現される。記憶部52の機能は、制御装置50の記憶装置によって実現される。入出力部53の機能は、制御装置50の入出力インターフェース装置によって実現される。
Body position
車体位置データ取得部51Aは、位置検出装置20から入出力部53を介して車体位置データを取得する。車体位置データは、グローバル座標系で規定される上部旋回体2の絶対位置Pg、ロール角度θ1及びピッチ角度θ2を含む上部旋回体2の姿勢及びヨー角度θ3を含む上部旋回体2の方位を含む。
The vehicle body position
作業機角度データ取得部51Bは、作業機角度検出装置24から入出力部53を介して作業機角度データを取得する。作業機角度データは、ブーム角度α、アーム角度β、バケット角度γ、チルト角度δ及びチルト軸角度εを含む作業機1の角度である。
The work machine angle data acquisition unit 51B acquires the work machine angle data from the work machine
候補規定点位置データ演算部51Caは、バケット8に設定された規定点RPの位置データを求める。候補規定点位置データ演算部51Caは、車体位置データ取得部51Aで取得された車体位置データと、作業機角度データ取得部51Bで取得された作業機角度データと、記憶部52に記憶されている作業機データとに基づいて、バケット8に設定される規定点RPの位置データを求める。規定点RPについては後述する。
The candidate specified point position data calculation unit 51Ca obtains the position data of the specified point RP set in the
図4に示すように、作業機データは、ブーム長さL1、アーム長さL2、バケット長さL3、チルト長さL4、及びバケット幅L5を含む。ブーム長さL1は、ブーム軸AX1とアーム軸AX2との距離である。アーム長さL2は、アーム軸AX2とバケット軸AX3との距離である。バケット長さL3は、バケット軸AX3とバケット8の刃先9との距離である。チルト長さL4は、バケット軸AX3とチルト軸AX4との距離である。バケット幅L5は、側板84と側板85との距離である。
As shown in FIG. 4, the work equipment data includes a boom length L1, an arm length L2, a bucket length L3, a tilt length L4, and a bucket width L5. The boom length L1 is the distance between the boom shaft AX1 and the arm shaft AX2. The arm length L2 is the distance between the arm shaft AX2 and the bucket shaft AX3. The bucket length L3 is the distance between the bucket shaft AX3 and the
図11は、本実施形態に係るバケット8に設定される規定点RPの一例を模式的に示す図である。図11に示すように、バケット8には、チルトバケット制御に使用される規定点RPの候補となる候補規定点RPcが複数設定される。候補規定点RPcは、バケット8の刃先9及びバケット8の外面に設定される。候補規定点RPcは、刃先9においてバケット幅方向に複数設定される。また、候補規定点RPcは、バケット8の外面において複数設定される。前述した規定点RPは、候補規定点RPcのうちの1つである。
FIG. 11 is a diagram schematically showing an example of a defined point RP set in the
作業機データは、バケット8の形状及び寸法を示すバケット外形データを含む。バケット外形データは、バケット幅L5を含む。バケット外形データは、バケット8の外面の輪郭データ、及びバケット8の刃先9を基準としたバケット8の複数の候補規定点RPcの座標データを含む。
The work equipment data includes bucket outer shape data indicating the shape and dimensions of the
候補規定点位置データ演算部51Caは、上部旋回体2の基準位置P0に対する複数の候補規定点RPcそれぞれの相対位置を算出する。また、候補規定点位置データ演算部51Caは、複数の候補規定点RPcそれぞれの絶対位置を算出する。
The candidate specified point position data calculation unit 51Ca calculates the relative position of each of the plurality of candidate specified point RPc with respect to the reference position P0 of the
候補規定点位置データ演算部51Caは、ブーム長さL1、アーム長さL2、バケット長さL3、チルト長さL4、及びバケット外形データを含む作業機データと、ブーム角度α、アーム角度β、バケット角度γ、チルト角度δ、及びチルト軸角度εを含む作業機角度データに基づいて、上部旋回体2の基準位置P0に対するバケット8の複数の候補規定点RPcそれぞれの相対位置を算出することができる。図4に示すように、上部旋回体2の基準位置P0は、上部旋回体2の旋回軸RXに設定される。なお、上部旋回体2の基準位置P0は、ブーム軸AX1に設定されてもよい。
The candidate specified point position data calculation unit 51Ca includes work equipment data including boom length L1, arm length L2, bucket length L3, tilt length L4, and bucket outer shape data, boom angle α, arm angle β, and bucket. Based on the work equipment angle data including the angle γ, the tilt angle δ, and the tilt axis angle ε, the relative positions of the plurality of candidate specified points RPc of the
また、候補規定点位置データ演算部51Caは、位置検出装置20によって検出された上部旋回体2の絶対位置Pgと、上部旋回体2の基準位置P0とバケット8との相対位置とに基づいて、バケット8の絶対位置Paを算出可能である。絶対位置Pgと基準位置P0との相対位置は、油圧ショベル100の諸元データから導出される既知データである。候補規定点位置データ演算部51Caは、上部旋回体2の絶対位置Pgを含む車体位置データと、上部旋回体2の基準位置P0とバケット8との相対位置と、作業機データと、作業機角度データとに基づいて、バケット8の複数の候補規定点RPcそれぞれの絶対位置を算出することができる。候補規定点RPcはバケット8の幅方向の情報とバケット8の外面の情報とを含めば、点に限定されなくてもよい。
Further, the candidate specified point position data calculation unit 51Ca is based on the absolute position Pg of the
目標施工形状生成部51Dは、目標施工データ生成装置70から与えられる目標施工データに基づいて、施工対象の目標形状を示す目標施工形状CSを生成する。目標施工データ生成装置70は、目標施工データとして、3次元目標地形データを目標施工形状生成部51Dに与えてもよいし、目標形状の一部を示す複数のラインデータ又は複数のポイントデータを目標施工形状生成部51Dに与えてもよい。本実施形態において、目標施工データ生成装置70は、目標施工データとして、目標形状の一部を示すラインデータを目標施工形状生成部51Dに与えることとする。
The target construction
図12は、本実施形態に係る目標施工データCDの一例を示す模式図である。図12に示されるように、目標施工データCDは、施工エリアの目標地形を示す。目標地形は、三角形ポリゴンによってそれぞれ表現される複数の目標施工形状CSを含む。複数の目標施工形状CSのそれぞれは、作業機1による施工対象の目標形状を示す。目標施工データCDにおいて、目標施工形状CSのうちバケット8との垂直距離が最も近い点APが規定される。また、目標施工データCDにおいて、点AP及びバケット8を通りバケット軸AX3と直交する作業機動作平面WPが規定される。作業機動作平面WPは、ブームシリンダ11、アームシリンダ12及びバケットシリンダ13の少なくとも一つの動作によりバケット8の刃先9が移動する動作平面であり、車体座標系(X−Y−Z)におけるXZ平面と平行である。
FIG. 12 is a schematic view showing an example of the target construction data CD according to the present embodiment. As shown in FIG. 12, the target construction data CD shows the target topography of the construction area. The target terrain includes a plurality of target construction shapes CS, each represented by a triangular polygon. Each of the plurality of target construction shapes CS indicates a target shape to be constructed by the
目標施工形状生成部51Dは、作業機動作平面WPと目標施工形状CSとの交線であるラインLXを取得する。また、目標施工形状生成部51Dは、点APを通り目標施工形状CSにおいてラインLXと交差するラインLYを取得する。ラインLYは、横動作平面と目標施工地形CSとの交線を示す。横動作平面とは、作業機動作平面WPと直交し、点APを通過する平面である。ラインLYは、目標施工地形CSにおいてバケット8の側方方向に延在する。
The target construction
図13は、本実施形態に係る目標施工形状CSの一例を示す模式図である。目標施工形状生成部51Dは、ラインLX及びラインLYを取得して、ラインLX及びLYに基づいて、施工対象の目標形状を示す目標施工形状CSを生成する。目標施工形状CSをバケット8で掘削する場合、制御装置50は、バケット8を通る作業機動作平面WPと目標施工形状CSとの交線であるラインLXに沿ってバケット8を移動させる。
FIG. 13 is a schematic view showing an example of the target construction shape CS according to the present embodiment. The target construction
本実施形態において、制御装置50は、ラインLYに基づくチルト制御により、バケット8がチルト動作した場合でも規定点RPとラインLY上とで垂直距離が取得され、バケット8の制御を行うことができる。また、制御装置50は、ラインLYだけではなく、規定点RPに対する目標施工形状CSとの最短距離に基づき、ラインLYに平行なラインに基づいてチルト制御を行ってもよい。
In the present embodiment, the
動作平面演算部51Eは、部材に設定された規定点を通り、軸線と直交する動作平面を求める。本実施形態において、軸線はチルト軸AX4であり、部材はバケット8なので、動作平面演算部51Eは、部材であるバケット8の規定点RPを通り、軸線であるチルト軸AX4と直交するチルト動作平面TPを求める。チルト動作平面TPは、前述した動作平面に相当する。
The operation plane calculation unit 51E obtains an operation plane orthogonal to the axis through a specified point set on the member. In the present embodiment, since the axis is the tilt axis AX4 and the member is the
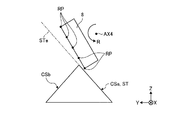
図14及び図15は、本実施形態に係るチルト動作平面TPの一例を示す模式図である。図14は、チルト軸AX4が目標施工形状CSと平行であるときのチルト動作平面TPを示す。図15は、チルト軸AX4が目標施工形状CSと非平行であるときのチルト動作平面TPを示す。 14 and 15 are schematic views showing an example of the tilt operation plane TP according to the present embodiment. FIG. 14 shows a tilt operation plane TP when the tilt axis AX4 is parallel to the target construction shape CS. FIG. 15 shows a tilt operation plane TP when the tilt axis AX4 is not parallel to the target construction shape CS.
図14及び図15に示されるように、チルト動作平面TPとは、バケット8に規定されている複数の候補規定点RPcから選択された規定点RPを通りチルト軸AX4と直交する動作平面をいう。規定点RPは、複数の候補規定点RPcのうち、チルトバケット制御において最も有利であると判定されたで規定点RPである。チルトバケット制御において最も有利である規定点RPは、目標施工形状CSとの距離が最も近い規定点RPである。なお、チルトバケット制御において最も有利である規定点RPは、その規定点RPに基づいてチルトバケット制御を実行したとき、油圧シリンダ10のシリンダ速度が最も速くなる規定点RPでもよい。規定点位置データ演算部51Cbは、バケット8の幅と、外面情報である候補規定点RPcと、目標施工形状CSとに基づき、規定点RP、詳細にはチルトバケット制御において最も有利である規定点RPを求める。
As shown in FIGS. 14 and 15, the tilt operation plane TP refers to an operation plane that passes through a specified point RP selected from a plurality of candidate specified point RPc defined in the
図14及び図15は、一例として、刃先9に設定された規定点RPを通るチルト動作平面TPを示す。チルト動作平面TPは、チルトシリンダ14の作動によりバケット8の規定点RP(刃先9)が移動する動作平面である。ブームシリンダ11、アームシリンダ12、及びバケットシリンダ13の少なくとも一つが作動し、チルト軸AX4の向きを示すチルト軸角度εが変化すると、チルト動作平面TPの傾きも変化する。
14 and 15 show, as an example, a tilt operation plane TP passing through a specified point RP set on the
前述したように、作業機角度検出装置24は、XY平面に対するチルト軸AX4の傾斜角度を示すチルト軸角度εを求める。チルト軸角度εは、作業機角度データ取得部51Bに取得される。また、規定点RPの位置データは、候補規定点位置データ演算部51Caによって求められる。動作平面演算部51Eは、作業機角度データ取得部51Bで取得されたチルト軸AX4のチルト軸角度εと、候補規定点位置データ演算部51Caによって求められた規定点RPの位置とに基づいて、チルト動作平面TPを求める。
As described above, the work equipment
目標形状演算部51Fは、制御目標形状であるチルト停止地形STを、目標施工形状CSから求める。本実施形態において、制御目標形状は、目標施工形状CSと動作平面とが交差する部分である。本実施形態において、動作平面はチルト動作平面TPなので、目標形状演算部51Fは、目標施工形状CSとチルト動作平面TPとが交差する部分によって規定される制御目標形状を求める。この制御目標形状を、以下においては適宜、チルト停止地形STと称する。停止地形演算部51Fは、複数の候補規定点RPcから選択された規定点RPの位置データと目標施工地形CSとチルトデータとに基づいて、目標施工地形CSにおいてバケット8の側方方向に延在するチルト目標地形STを算出する。図14及び図15に示されるように、チルト停止地形STは、目標施工形状CSとチルト動作平面TPとの交線によって表される。チルト軸AX4の向きであるチルト軸角度εが変化すると、チルト停止地形STの位置が変化する。
The target shape calculation unit 51F obtains the tilt stop terrain ST, which is the control target shape, from the target construction shape CS. In the present embodiment, the control target shape is a portion where the target construction shape CS and the operation plane intersect. In the present embodiment, since the operation plane is the tilt operation plane TP, the target shape calculation unit 51F obtains the control target shape defined by the portion where the target construction shape CS and the tilt operation plane TP intersect. In the following, this control target shape is appropriately referred to as a tilt stop terrain ST. The stop terrain calculation unit 51F extends laterally of the
目標形状演算部51Fは、チルト停止地形STを延長した延長目標形状を求める。本実施形態において、延長目標形状は、チルト停止地形STと平行にチルト停止地形STが延長された部分である。延長目標形状については後述する。 The target shape calculation unit 51F obtains an extension target shape obtained by extending the tilt stop terrain ST. In the present embodiment, the extension target shape is a portion where the tilt stop terrain ST is extended in parallel with the tilt stop terrain ST. The extension target shape will be described later.
作業機制御部51Gは、油圧シリンダ10を制御するための制御信号を出力する。チルト停止制御を実行する場合、作業機制御部51Gは、バケット8の規定点RPとチルト停止地形STとの距離を示す動作距離Daに基づいて、チルト軸AX4を中心とするバケット8のチルト動作を停止させるチルト停止制御を実行する。すなわち、本実施形態においては、チルト停止地形STを基準にチルト停止制御が実行される。チルト停止制御においては、作業機制御部51Gは、チルト動作するバケット8がチルト停止地形STを超えないように、チルト停止地形STでバケット8を停止させる。
The work
作業機制御部51Gは、バケット8に設定された複数の候補規定点RPcのうち動作距離Daが最も短い規定点RPに基づいて、チルト停止制御を実行する。すなわち、作業機制御部51Gは、バケット8に設定された複数の候補規定点RPc規定点RPのうちチルト停止地形STに最も近い規定点RPがチルト停止地形STを超えないように、チルト停止地形STに最も近い規定点RPとチルト停止地形STとの動作距離Daに基づいて、チルト停止制御を実行する。
The work
制限速度決定部51Hは、動作距離Daに基づいて、バケット8のチルト動作速度についての制限速度Uを決定する。制限速度決定部51Hは、動作距離Daが閾値であるライン距離H以下のときに、チルト動作速度を制限する。
The speed
決定部51Jは、目標施工形状CSを超えた範囲に存在するチルト停止地形STを、作業機制御部51Gがバケット8を停止させる際の目標とするか目標としないかを決定する。目標施工形状CSを超えた範囲に存在するチルト停止地形STを目標とする場合、作業機制御部51Gは、目標施工形状CSが存在する範囲及びこれを超えた範囲に存在するチルト停止地形STをバケット8が超えないように、バケット8のチルト動作を制御する。目標施工形状CSを超えた範囲に存在するチルト停止地形STを目標としない場合、作業機制御部51Gは、目標施工形状CSが存在する範囲に存在するチルト停止地形STをバケット8が超えないように、バケット8のチルト動作を制御する。
The
図16は、本実施形態に係るチルト停止制御を説明するための模式図である。図16に示されるように、目標施工形状CSが規定されるとともに、速度制限介入ラインILが規定される。速度制限介入ラインILは、チルト軸AX4と平行であり、チルト停止地形STからライン距離Hだけ離れた位置に規定される。ライン距離Hは、オペレータの操作感が損なわれないように設定されることが望ましい。作業機制御部51Gは、チルト動作するバケット8の少なくとも一部が速度制限介入ラインILを超え、動作距離Daがライン距離H以下になったとき、バケット8のチルト動作速度を制限する。制限速度決定部51Hは、速度制限介入ラインILを超えたバケット8のチルト動作速度についての制限速度Uを決定する。図16に示される例では、バケット8の一部が速度制限介入ラインILを超え、動作距離Daがライン距離Hよりも小さいため、チルト動作速度が制限される。
FIG. 16 is a schematic diagram for explaining the tilt stop control according to the present embodiment. As shown in FIG. 16, the target construction shape CS is defined and the speed limiting intervention line IL is defined. The speed limiting intervention line IL is parallel to the tilt axis AX4 and is defined at a position separated from the tilt stop terrain ST by a line distance H. It is desirable that the line distance H is set so as not to impair the operability of the operator. The work
制限速度決定部51Hは、チルト動作平面TPと平行な方向における規定点RPとチルト停止地形STとの動作距離Daを取得する。また、制限速度決定部51Hは、動作距離Daに応じた制限速度Uを取得する。作業機制御部51Gは、動作距離Daがライン距離H以下であると判定された場合、チルト動作速度を制限する。
The speed
図17は、チルトバケットのチルト回転を動作距離Daに基づき停止させるため、動作距離Daと制限速度Uとの関係の一例を示す図である。図17に示されるように、制限速度Uは、動作距離Daに応じて決められている速度である。制限速度Uは、動作距離Daがライン距離Hよりも大きいときには設定されず、動作距離Daがライン距離H以下のときに設定される。動作距離Daが小さくなるほど、制限速度Uは小さくなり、動作距離Daが零になると、制限速度Uも零になる。なお、図17では、目標施工形状CSに近付く方向を負の方向として表している。 FIG. 17 is a diagram showing an example of the relationship between the operating distance Da and the speed limit U in order to stop the tilt rotation of the tilt bucket based on the operating distance Da. As shown in FIG. 17, the speed limit U is a speed determined according to the operating distance Da. The speed limit U is not set when the operating distance Da is larger than the line distance H, and is set when the operating distance Da is equal to or less than the line distance H. The smaller the operating distance Da, the smaller the speed limit U, and when the operating distance Da becomes zero, the speed limit U also becomes zero. In FIG. 17, the direction approaching the target construction shape CS is represented as a negative direction.
制限速度決定部51Hは、操作装置30のチルト操作レバー30Tの操作量に基づいて、規定点RPが目標施工データCDによって特定される目標施工形状CS(チルト停止地形ST)に向かって移動するときの移動速度Vrを求める。移動速度Vrは、チルト動作平面TPと平行な面内における規定点RPの移動速度である。移動速度Vrは、複数の規定点RPのそれぞれについて求められる。
When the speed
本実施形態においては、チルト操作レバー30Tが操作された場合、チルト操作レバー30Tから出力された電流値に基づいて、移動速度Vrが求められる。チルト操作レバー30Tが操作されると、チルト操作レバー30Tの操作量に応じた電流がチルト操作レバー30Tから出力される。記憶部52には、チルト操作レバー30Tから出力される電流値とパイロット圧との関係を示す第1相関データが記憶されている。また、記憶部52には、パイロット圧とスプールの移動量を示すスプールストロークとの関係を示す第2相関データが記憶されている。また、記憶部52には、スプールストロークとチルトシリンダ14のシリンダ速度との関係を示す第3相関データが記憶されている。
In the present embodiment, when the
第1相関データ、第2相関データ、及び第3相関データは、実験又はシミュレーション等により事前に求められる既知データである。制限速度決定部51Hは、チルト操作レバー30Tから出力された電流値と、記憶部52に記憶されている第1相関データ、第2相関データ及び第3相関データとに基づいて、チルト操作レバー30Tの操作量に応じたチルトシリンダ14のシリンダ速度を求める。シリンダ速度は、実際のストロークセンサの検出値が用いられてもよい。チルトシリンダ14のシリンダ速度が求められた後、制限速度決定部51Hは、ヤコビアン行列式を使って、チルトシリンダ14のシリンダ速度をバケット8の複数の規定点RPそれぞれの移動速度Vrに変換する。
The first correlation data, the second correlation data, and the third correlation data are known data obtained in advance by experiments, simulations, or the like. The speed
作業機制御部51Gは、動作距離Daがライン距離H以下であると判定された場合、目標施工形状CSに対する規定点RPの移動速度Vrを制限速度Uに制限する速度制限を実行する。作業機制御部51Gは、バケット8の規定点RPの移動速度Vrを抑えるために、制御弁37に制御信号を出力する。作業機制御部51Gは、バケット8の規定点RPの移動速度Vrが動作距離Daに応じた制限速度Uになるように、制御弁37に制御信号を出力する。この処理により、チルト動作するバケット8の規定点RPの移動速度は、規定点RPが目標施工形状CS(チルト停止地形ST)に近付くほど遅くなり、規定点RP(刃先9)が目標施工形状CSに到達したときに零になる。
When it is determined that the operating distance Da is equal to or less than the line distance H, the working
本実施形態においては、チルト動作平面TPが規定され、チルト動作平面TPと目標施工形状CSとの交線であるチルト停止地形STが導出される。作業機制御部51Gは、複数の候補規定点RPcのうちチルト停止地形STに最も近い規定点RPと目標施工形状CSとの動作距離Daに基づいて、その規定点RPが目標施工形状CSを超えないように、チルト停止制御を実行する。本実施形態においては、バケット8がチルト動作するだけでは、チルト停止地形STの位置は変化しない。したがって、チルト動作可能なバケット8を使った掘削作業は円滑に実行される。
In the present embodiment, the tilt operation plane TP is defined, and the tilt stop terrain ST which is the line of intersection between the tilt operation plane TP and the target construction shape CS is derived. The work
[チルト停止制御を利用したバケット8の位置決め]
制御装置50は、目標施工形状CSに向かってバケット8を移動させながらチルト停止制御を実行すると、目標施工形状CSでバケット8を停止させることができる。すなわち、制御装置50は、バケット8を目標施工形状CSに位置決めすることができる。この場合、バケット停止制御も併用される。バケット停止制御は、バケット8と目標施工形状CSとの距離に基づいて、作業機、すなわちブーム6、アーム7及びバケット8の少なくとも1つを制御することにより、バケット8を目標施工形状CSでバケット8を停止させる制御である。例えば、バケット停止制御において、制御装置50は、バケット8と目標施工形状CSとの距離に基づいてブーム6の動作を制御することにより、バケット8が目標施工形状CSに接近する速度を制限する。このような処理により、バケット8は目標施工形状CSで停止するので、目標施工形状CSの侵食が抑制される。
[Positioning of
When the
図18、図19及び図20は、バケット8を移動させながらチルト停止制御を実行する場合の一例を示す図である。図18及び図19に示される例において、油圧ショベル100の施工対象は、断面が凸形状となっている。目標施工形状CSは、目標施工形状CSaと目標施工形状CSbとが変曲位置SLで接続されたものとなっている。目標施工形状CSaにバケット8が位置決めされる場合、制御装置50は、目標施工形状CSとチルト動作平面TPとが交差する部分であるチルト停止地形STを、バケット8を停止させる目標として、チルト停止制御を実行する。
18, 19 and 20 are diagrams showing an example of a case where tilt stop control is executed while moving the
油圧ショベル100のオペレータは、目標施工形状CSaにバケット8を位置決めする場合、図9に示される操作装置30のチルト操作レバー30Tを操作してバケット8をチルト動作させながらブーム6を下降させる。バケット8は、チルト動作によって、チルト軸AX4を中心として、図18及び図19に示される矢印Rの方向に回転する。また、ブーム6の下降によって、図18、図19及び図20に示される矢印Dで示される方向に移動する。
When positioning the
制御装置50は、バケット8と目標施工形状CSaに対応するチルト停止地形STとの動作距離Daに基づいてチルト動作速度を制限し、かつバケット8と目標施工形状CSaとの垂直距離Dbに基づいて及びバケット8の下降速度Vbを制限する。垂直距離Dbは、バケット8の規定点RPと目標施工形状CSaとの距離である。バケット8の規定点RPから目標施工形状CSaに向かって延ばした垂線に沿って得られる、規定点RPと目標施工形状CSaとの距離が、垂直距離Dbである。
The
制御装置50は、バケット8の刃先9に設定された規定点RPのうち1つの垂直距離Dbが零になると、ブーム6の下降を停止させる。この場合、目標施工形状CSaの直上に存在する規定点RPは、バケット8がチルト動作するときの移動速度Vrが正であるため、制御装置50はバケット8のチルト動作を継続する。図18に示される例では、バケット8は矢印R方向へ回転し続ける。バケット8が回転することにより、バケット8が目標施工形状CSaを離れると、制御装置50は、その分だけブーム6を下降させる。本実施形態において、正の移動速度Vrとは、バケット8が目標施工形状CSaから離れる場合の移動速度Vrをいう。
The
図19に示されるように、バケット8の刃先9が目標施工形状CSaに接すると、動作距離Daは零になるが、目標施工形状CSa上の規定点RPの移動速度Vrは正である。このとき、バケット8は一部が目標施工形状CSaに接するが、残りの部分は目標施工形状CSaに接していない。目標施工形状CSa上に存在しない部分の規定点RPは、負の移動速度Vrを有する。本実施形態において、負の移動速度Vrとは、バケット8が目標施工形状CSbを掘り込む場合の移動速度Vrである。目標施工形状CSa上に存在しない部分の規定点RPは、目標施工形状CSbに向かって移動速度Vrで移動する。このため、バケット8は、図20に示されるように、同じ方向にチルト動作を継続する。バケット8がさらにチルト動作を継続し、負の動作速度Vrを有する規定点RP、図20に示される例では目標施工形状CSaの直上に存在する規定点RPが目標施工形状CSに接して動作距離Daが零になると、バケット8は停止する。
As shown in FIG. 19, when the
オペレータは、目標施工形状CSaにバケット8を位置決めしたいが、実際には目標施工形状CSbにバケット8が位置決めされるので、オペレータが意図した動作が実現されない。また、バケット8が目標施工形状CSbに向かってチルト動作する過程で、変曲位置SL近傍の目標施工形状CSa,CSbがバケット8によって削られることもある。
The operator wants to position the
図21及び図22は、本実施形態に係る停止制御を説明するための図である。オペレータがバケット8を位置決めしたい目標施工形状CSaにバケット8を位置決めするため、本実施形態においては、目標施工形状CSaのチルト停止地形STを、変曲位置SLを超えた範囲まで延長する。チルト停止地形STは、図22に示されるように、チルト動作平面TPと目標施工形状CSとが交差する部分である。図21に示される例において、チルト停止地形STが延長された部分は、一点鎖線及び符号STeで示される部分である。以下において、この延長された部分を適宜、延長停止地形STeと称する。延長停止地形STeは、延長目標形状である。
21 and 22 are diagrams for explaining the stop control according to the present embodiment. In order to position the
延長停止地形STeは、前述したように、チルト停止地形STと平行にチルト停止地形STを延長した部分である。本実施形態において、チルト停止地形STは直線の線分であり、延長停止地形STeはチルト停止地形STと連続し、かつチルト停止地形STと平行な直線である。チルト停止地形ST及び延長停止地形STeは直線の線分及び直線には限定されず、例えば、平面であってもよい。 As described above, the extended stop terrain ST is a portion in which the tilt stop terrain ST is extended in parallel with the tilt stop terrain ST. In the present embodiment, the tilt stop terrain ST is a straight line segment, and the extension stop terrain ST is a straight line continuous with the tilt stop terrain ST and parallel to the tilt stop terrain ST. The tilt stop terrain ST and the extension stop terrain ST are not limited to straight line segments and straight lines, and may be, for example, a plane.
図23、図24及び図25は、バケット8を移動させながら本実施形態に係るチルト停止制御を実行する場合の一例を示す図である。目標施工形状CSaにバケット8が位置決めされる場合、制御装置50は、図22に示されるように、目標施工形状CSaとチルト動作平面TPとが交差する部分であるチルト停止地形ST及びチルト停止地形STを延長した延長停止地形STeを、バケット8のチルト動作を停止させる目標として、チルト停止制御を実行する。
23, 24, and 25 are diagrams showing an example of a case where the tilt stop control according to the present embodiment is executed while moving the
延長停止地形STeは、図21から図25に示される例からも理解できるように、バケット8を位置決めする対象の目標施工形状CSaを超えた範囲に存在する。延長停止地形STeは、バケット8を位置決めする対象の目標施工形状CSaと変曲位置SLで接続される目標施工形状CSbの上方に存在する。上方とは、車体座標系(X−Y−Z)においてZ軸の正の方向である。Z軸の正の方向は、図1に示される油圧ショベル100の下部走行体3から上部旋回体2に向かう方向である。図9に示される目標形状演算部51Fは、生成したチルト停止地形STを、少なくとも変曲位置SLの方向に延長して、延長停止地形STeを求める。求められた延長停止地形STeは、図9に示される記憶部52に一時的に記憶される。
As can be understood from the examples shown in FIGS. 21 to 25, the extended stop terrain STe exists in a range beyond the target construction shape CSa of the target for positioning the
油圧ショベル100のオペレータは、目標施工形状CSaにバケット8を位置決めする場合、図9に示される操作装置30のチルト操作レバー30Tを操作してバケット8を矢印R方向にチルト動作させながらブーム6を下降させる。バケット8は、チルト動作によって、チルト軸AX4を中心として、図23及び図24に示される矢印Rの方向に回転する。また、ブーム6の下降によって、図23及び図24に示される矢印Dで示される方向に移動する。
When the operator of the
制御装置50は、バケット8と目標施工形状CSaに対応するチルト停止地形STとの動作距離Daに基づいてチルト動作速度を制限し、バケット8と目標施工形状CSaとの垂直距離Dbに基づいてバケット8の下降速度を制限する。図23に示されるように、制御装置50は、バケット8と目標施工形状CSaとの垂直距離Dbが零になると、ブーム6の下降を停止させる。前述したように、ブーム6の下降が停止しても、目標施工形状CSaの直上の規定点RPは正の移動速度Vrなので、バケット8は、矢印Rで示される方向のチルト動作を継続する。
The
制御装置50は、バケット8がチルト動作した分だけブーム6を下降させながら、バケット8の姿勢を、刃先9が目標施工形状CSaに平行となるように変更する。本実施形態において、制御装置50は、チルト停止地形ST及び延長停止地形STeを目標としてバケット8のチルト停止制御を実行する。すなわち、チルト停止地形ST及び延長停止地形STeに対して負の移動速度Vrを有する規定点RPと、チルト停止地形ST及び延長停止地形STeとの動作距離Daが0になると、制御装置50はバケット8のチルト動作、この例では矢印R方向への回転を停止させる。この処理によって、図25に示されるように、バケット8は、刃先9が目標施工形状CSaに位置した状態で停止するので、目標施工形状CSaに位置決めされる。
The
このように、制御装置50は、バケット8を目標施工形状CSaで停止させるチルト停止制御を実行する場合、バケット8を停止させるために目標とする地形を、チルト停止地形ST及び延長停止地形STeとする。そして、制御装置50は、バケット8とチルト停止地形ST及び延長停止地形STeとの動作距離Daに基づいて、バケット8の回転、すなわちチルト動作を停止させる。その結果、バケット8は、刃先9が目標施工形状CSaに位置した状態で停止するので、オペレータは、意図した通りにバケット8を操作することができる。
As described above, when the
図26は、バケット8が空中で停止することを説明するための図である。図27は、バケット8を目標施工形状CSbに位置決めした状態を示す図である。チルト停止制御において、制御装置50がバケット8とチルト停止地形ST及び延長停止地形STeとの動作距離Daに基づいてバケット8のチルト動作を停止させると、制御装置50は、延長停止地形STeとバケット8との動作距離Daが0になった時点でバケット8のチルト動作を停止させる。すると、図26に示されるように、バケット8が空中で停止してしまう。その結果、図27に示されるように、オペレータがバケット8を目標施工形状CSbに位置決めするようにバケット8の姿勢を変更したい場合、バケット8の動作が阻止されてしまう。
FIG. 26 is a diagram for explaining that the
この現象を回避するため、制御装置50の決定部51Jは、バケット8と目標施工形状CSaに対応するチルト停止地形STとの距離である動作距離Daに基づいて、延長停止地形STeを、バケット8を停止させる際の目標とするか否かを決定する。詳細には、決定部51Jは、バケット8に設定されている規定点RPと、規定点RPの直下に存在する目標施工形状CSaに対応するチルト停止地形STとの動作距離Daが閾値以下である場合に、延長停止地形STeを、バケット8を停止させる際の目標とする。そして、決定部51Jは、バケット8に設定されている規定点RPと、規定点RPの直下に存在する目標施工形状CSaに対応するチルト停止地形STとの動作距離Daが閾値よりも大きい場合には、延長停止地形STeを、バケット8を停止させる際の目標としない。規定点RPの直下とは、油圧ショベル100の車体座標系(X−Y−Z)におけるZ軸の負の方向である。Z軸の負の方向は、図1に示される油圧ショベル100の上部旋回体2から下部走行体3に向かう方向である。
In order to avoid this phenomenon, the
図26に示される例では、バケット8の規定点RPのうち、負の移動速度Vrを有する1つの規定点RPと延長停止地形STeとの動作距離Daが零である。しかし、バケット8の他の規定点RPと、この規定点RPの直下に存在する目標施工形状CSaに対応したチルト停止地形STとの動作距離Daは閾値よりも大きい。このため、決定部は、延長停止地形STeを、バケット8を停止させる際の目標としない。その結果、バケット8は空中で停止せずに、目標施工形状CSaで位置決めされる。
In the example shown in FIG. 26, among the specified point RPs of the
図28及び図29は、バケット8と目標施工形状CSaとの重なりによって、延長停止地形STeを、バケット8を停止させる際の目標とするか否かを決定する例を説明するための図である。図28に示される例のように、バケット8と目標施工形状CSaとの重なりが多い状態で、オペレータが図23から図25に示されるような動作をバケット8に行わせるための操作をしている場合、オペレータは目標施工形状CSaにバケット8を位置決めしたいと考えられる。図29に示される例のように、バケット8と目標施工形状CSaとの重なりが少ない場合にバケット8がチルト動作している場合、オペレータはチルト軸AX4を中心として目標施工形状CSbに向けてバケット8を回転させて、目標施工形状CSbにバケット8を位置決めしたいと考えられる。
28 and 29 are diagrams for explaining an example of determining whether or not the extended stop terrain STe is the target for stopping the
決定部51Jは、バケット8と目標施工形状CSaとの重なりに基づいて、延長停止地形STeを、バケット8を停止させる際の目標とするか否かを決定する。詳細には、決定部51Jは、バケット8に設定された複数の規定点RPのうち、第1閾値以上の数の規定点RPがバケット8の直下に存在する目標施工形状CSaと重なっている場合、延長停止地形STeを、バケット8を停止させる際の目標とする。この場合、制御装置50は、チルト停止地形ST及び延長停止地形STeの両方を、チルト停止制御においてバケット8を停止させる際の目標とする。
The
決定部51Jは、バケット8に設定された複数の規定点RPのうち、第1閾値よりも小さい第2閾値以下の数の規定点RPがバケット8の直下に存在する目標施工形状CSaと重なっている場合、延長停止地形STeを、バケット8を停止させる際の目標とはしない。この場合、制御装置50は、チルト停止地形STを、チルト停止制御においてバケット8を停止させる際の目標とする。
In the
このように、決定部51Jは、バケット8と目標施工形状CSaとの重なりに基づいて、延長停止地形STeを、バケット8を停止させる際の目標とするか否かを決定するので、オペレータが目標施工形状CSaにバケット8を位置決めしたいか否かを確実に判定することができる。その結果、制御装置50は、オペレータが意図した目標施工形状CSaにバケット8を位置決めすることができる。
In this way, the
バケット8の直下に存在する目標施工形状CSaとは、車体座標系(X−Y−Z)において、バケット8から見てZ軸方向の負の方向に存在する目標施工形状CSaである。バケット8と目標施工形状CSaとの重なりは、車体座標系(X−Y−Z)のZ軸の正方向からバケット8及び目標施工形状CSaを見た場合において、バケット8と目標施工形状CSaとの重なりの程度、すなわち重なりの量又は重なりの割合等で表される。
The target construction shape CSa existing directly under the
図30は、車体座標系(X−Y−Z)におけるバケット8と目標施工形状CSaとを示す図である。目標施工形状CSaは、ラインLX及びラインLYに基づいて目標施工形状生成部51Dによって生成される。ラインLXとラインLYとの交点は、作業機動作平面WP及び車体座標系(X−Y−Z)のZ軸と平行、かつバケット8の一部(この例では規定点RP)を通る直線LCと交差する。目標施工形状生成部51Dは、ラインLX及びラインLYに基づいて、破線で示される目標施工形状CSa1と一点鎖線で示される目標施工形状CSa2とを生成できる。本実施形態において、決定部51Jは、バケット8と目標施工形状CSaとの重なりを求めるにあたり、目標施工形状CSa1又は目標施工形状CSa2のいずれを用いてもよい。
FIG. 30 is a diagram showing a
決定部51Jは、バケット8の姿勢、本実施形態においては、バケット8の刃先9と目標施工形状CSaとのなす角度θbに基づいて、延長停止地形STeを、バケット8を停止させる際の目標とするか否かを決定する。決定部51Jは、バケット8の刃先9に設定された複数の規定点RPから刃先9を表す直線を求める。そして、決定部51Jは、求めた直線と目標施工形状CSaに存在するチルト停止地形STとのなす角度θbを求める。
The
決定部51Jは、角度θbが第1角度閾値以下である場合、延長停止地形STeを、バケット8を停止させる際の目標とする。この場合、制御装置50は、チルト停止地形ST及び延長停止地形STeの両方を、チルト停止制御においてバケット8を停止させる際の目標とする。決定部51Jは、角度θbが第1角度閾値よりも大きい第2角度閾値よりも大きい場合、延長停止地形STeを、バケット8を停止させる際の目標とはしない。この場合、制御装置50は、チルト停止地形STを、チルト停止制御においてバケット8を停止させる際の目標とする。
When the angle θb is equal to or less than the first angle threshold value, the
図21に示される角度θbは、バケット8、本実施形態ではバケット8の刃先9が目標施工形状CSaに沿っていることを示す指標である。角度θbが小さい場合、オペレータは目標施工形状CSaにバケット8を位置決めしたいと考えられる。角度θbが大きい場合、オペレータは目標施工形状CSaにバケット8を位置決めする意思はないと考えられる。決定部51Jは、角度θbを用いることで、オペレータが目標施工形状CSaにバケット8を位置決めしたいか否かを精度よく判定できる。
The angle θb shown in FIG. 21 is an index indicating that the
図31は、決定部51Jの制御ブロック図である。決定部51Jは、操作状態決定部511と、動作距離決定部512と、重なり決定部513と、姿勢決定部514と、第1論理積演算部515と、距離決定部516と、第2論理積演算部517とを含む。操作状態決定部511は、ブーム6を操作する右操作レバー30Rの操作状態CTに基づいて、操作フラグFcを生成する。右操作レバー30Rの操作状態CTがブーム下げDである場合、操作状態決定部511は、操作フラグFcをTRUE(本実施形態では1)とする。右操作レバー30Rの操作状態CTがブーム上げUPである場合、操作状態決定部511は、操作フラグFcをFALSE(本実施形態では0)とする。
FIG. 31 is a control block diagram of the
動作距離決定部512は、動作距離Daに基づいて、動作距離フラグFdを生成する。動作距離Daが第1距離閾値Da1以下になった場合、動作距離決定部512は、動作距離フラグFdをTRUE(本実施形態では1)とする。動作距離Daが第2距離閾値Da2以上になった場合、動作距離決定部512は、動作距離フラグFdをFALSE(本実施形態では0)とする。
The operating
重なり決定部513は、重なり率KRに基づいて、重なり判定フラグFkを生成する。重なり率KRは、バケット8に設定されたすべての規定点RPのうち、バケット8の直下に存在する目標施工形状CSaと重なっている規定点RPの割合である。重なり率KRが第1閾値A以上になった場合、重なり決定部513は、重なり判定フラグFkをTRUE(本実施形態では1)とする。重なり率KRが第1閾値Aよりも小さい第2閾値B以下になった場合、重なり決定部513は、重なり判定フラグFkをFALSE(本実施形態では0)とする。
The
このように、決定部51Jは、バケット8を停止させる際の目標を延長停止地形STeとする決定をする場合の重なりの大きさを、目標としない決定をする場合の重なりの大きさよりも大きくする。このようにすることで、制御装置50がバケット8のチルト動作を調整している最中に、延長停止地形STeが消えることを抑制できる。
In this way, the
姿勢決定部514は、目標施工形状CSaに対するバケット8の姿勢、本実施形態では角度θbに基づいて、姿勢判定フラグFθを生成する。角度θbが第1角度閾値θc1以下になった場合、姿勢決定部514は、姿勢判定フラグFθをTRUE(本実施形態では1)とする。角度θbが第2閾値θc2以上になった場合、姿勢決定部514は、姿勢判定フラグFθをFALSE(本実施形態では0)とする。
The
第1論理積演算部515は、操作フラグFcと動作距離フラグFdとの論理積、すなわちANDを演算し、第1演算結果Faを距離決定部516に出力する。第1演算結果Faは、操作フラグFc及び動作距離フラグFdの両方がTRUE(1)の場合に1(TRUE)となり、この組合せ以外は0(FALSE)となる。
The first logical
距離決定部516は、第1演算結果Faと動作距離フラグFdとに基づいて、第2演算結果Fxを第2論理積演算部517に出力する。第2演算結果Fxは、第1演算結果Fa及び動作距離フラグFdの両方がTRUEの場合(BT・・・Both TRUE)にTRUE(1)となり、動作距離フラグFdがFALSEである場合(DF・・・Distance FALSE)はFALSE(0)となる。
The
第2論理積演算部517は、第2演算結果Fxと、重なり判定フラグFkと、姿勢判定フラグFθとの論理積を演算し、演算結果を決定部51Jの判定結果OTとして出力する。判定結果OTは、第2演算結果Fx、重なり判定フラグFk及び姿勢判定フラグFθがいずれもTRUE(1)の場合にTRUE(1)となり、この組合せ以外はFALSE(0)となる。
The second logical
判定結果OTがTRUEである場合、延長停止地形STeは、バケット8を停止させる際の目標となる。この場合、制御装置50は、チルト停止地形ST及び延長停止地形STeの両方を、チルト停止制御においてバケット8を停止させる際の目標とする。判定結果OTがFALSEである場合、延長停止地形STeは、バケット8を停止させる際の目標とはならない。この場合、制御装置50は、チルト停止地形STを、チルト停止制御においてバケット8を停止させる際の目標とする。
When the determination result OT is TRUE, the extended stop terrain STe becomes a target when the
決定部51Jは、操作フラグFcがFALSE(0)、すなわち右操作レバー30Rの操作状態CTがブーム上げUPである場合、動作距離フラグFd、重なり判定フラグFk及び姿勢判定フラグFθをすべてFALSE(0)とする。ブーム6が上昇する場合、目標施工形状CSaからバケット8が遠ざかるため、オペレータはバケット8を目標施工形状CSaに位置決めする意思はないと判定できるからである。
When the operation flag Fc is FALSE (0), that is, when the operation state CT of the
[制御方法]
図32は、本実施形態に係る作業機械の制御方法の一例を示すフローチャートである。ステップS101において、制御装置50の決定部51Jは、延長停止地形STeを、バケット8を停止させる際の目標とするか否かの判定に用いる判定値を得る。詳細には、決定部51Jは、右操作レバー30Rから操作状態CTを、制限速度決定部51Hから動作距離Daを取得するとともに、角度θb及び重なり率KRを求める。これらが、前述した判定値である。
[Control method]
FIG. 32 is a flowchart showing an example of the control method of the work machine according to the present embodiment. In step S101, the
決定部51Jは、ステップS101で得られた判定値を用いて判定結果OTを求めて出力する。ステップS102において、判定結果OTがTRUEである場合(ステップS102,Yes)、ステップS103において、延長停止地形STeが有効、すなわち延長停止地形STeは、バケット8を停止させる際の目標となる。この場合、制御装置50は、チルト停止地形ST及び延長停止地形STeの両方を、チルト停止制御においてバケット8を停止させる際の目標とする。
The
ステップS102において、判定結果OTがTRUEでない場合、すなわちFALSEである場合(ステップS102,No)、ステップS104において、延長停止地形STeが無効、すなわち延長停止地形STeは、バケット8を停止させる際の目標とはならない。この場合、制御装置50は、チルト停止地形STを、チルト停止制御においてバケット8を停止させる際の目標とする。
In step S102, when the determination result OT is not TRUE, that is, when it is FALSE (steps S102, No), in step S104, the extended stop terrain Ste is invalid, that is, the extended stop terrain Ste is a target when the
ステップS105において、制御装置50は、ステップST103又はステップS104において決定された、バケット8を停止させる際の目標とバケット8との動作距離Daに基づいて、バケット8がチルト動作するときの速度を減速させる。この場合、作業機制御部51Gは、チルト操作レバー30Tの操作量から求められるバケット8の規定点RPの移動速度Vrと、制限速度決定部51Hにより決定された制限速度Uとに基づいて、制御弁37に対する制御信号を求める。
In step S105, the
オペレータが図23から図25に示されるような動作をバケット8に行わせるための操作をすると、作業機制御部51Gは、移動速度Vrを制限速度Uにするための制御信号を算出し、制御弁37に出力する。制御弁37は、作業機制御部51Gから出力された制御信号に基づいて、パイロット圧を制御する。この処理により、バケット8の規定点RPの移動速度Vrが制限される。チルト動作するバケット8が目標施工形状CSaに近付き、すべての規定点RPにおける動作距離Daが零になると、バケット8のチルト動作は停止する。その結果、バケット8は、目標施工形状CSaに位置決めされる。
When the operator performs an operation for causing the
以上、本実施形態は、作業具であるバケット8と、チルト停止地形ST及びチルト停止地形STを延長した延長停止地形STeとの距離に基づいて、バケット8の回転を制御する。このため、目標施工形状CSに不連続な部分がある場合であっても、チルト停止地形STを延長した延長停止地形STeによってバケット8のチルト動作を停止させることができるので、バケット8を位置決めしたい目標施工形状CSaにバケット8を位置決めできる。また、目標施工形状CSに不連続な部分があっても、バケット8のチルト動作が停止されるので、目標施工形状CSの変曲位置SLに相当する目標施工形状CSの不連続な部分がバケット8に削られる可能性を低減できる。
As described above, in this embodiment, the rotation of the
本実施形態において、制御装置50は、チルト停止地形STを延長した延長停止地形STeを予め生成しておき、バケット8と、チルト停止地形ST及び延長停止地形STeとの距離に基づいて、バケット8の回転を制御する場合に、延長停止地形STeを有効とする。このような制御には限定されず、制御装置50は、バケット8と、チルト停止地形ST及び延長停止地形STeとの距離に基づいて、バケット8の回転を制御する場合に、延長停止地形STeを生成してもよい。
In the present embodiment, the
本実施形態において、制御装置50は、バケット8と目標施工形状CSaとの重なり、バケット8と目標施工形状CSaに対応するチルト停止地形STとの動作距離Da、バケット8の姿勢及び作業機1の操作状態CTに基づいて、延長停止地形STeを、バケット8の回転を制御する際の目標とするか目標としないかを決定する。このような処理によって、制御装置50は、油圧ショベル100のオペレータが目標施工形状CSaにバケット8を位置合わせする意思を判定できる。このため、オペレータが目標施工形状CSaにバケット8を位置合わせする意思を有していない場合、延長停止地形STeに対するバケット8のチルト停止制御は実行されず、バケット8のチルト動作は許容される。この場合、チルト停止地形ST対するバケット8のチルト停止制御は実行される。また、オペレータが目標施工形状CSaにバケット8を位置合わせする意思を有している場合、バケット8は、停止制御によって目標施工形状CSaに位置決めされる。その結果、制御装置50は、オペレータの意図に沿ったバケット8の動作を実現できる。
In the present embodiment, the
本実施形態において、制御装置50は、バケット8の回転を制御する際に延長停止地形STeを目標とする場合と目標としない場合とで、バケット8と目標施工形状CSaとの重なり、バケット8と目標施工形状CSaに対応するチルト停止地形STとの動作距離Da、及びバケット8の刃先9と目標施工形状CSaとのなす角度θbの判定条件にヒステリシスを設けている。このようにすることで、制御装置50がバケット8のチルト動作を微調整している最中に、延長停止地形STeが消えることを抑制できる。しかし、前述した判定条件にヒステリシスを設けることに限定はされず、ヒステリシスを設けなくてもよい。
In the present embodiment, the
本実施形態において、作業機制御部51Gがバケット8の回転を制御する例として、バケット8のチルト動作を停止させるチルト停止制御を説明したが、作業機制御部51Gがバケット8の回転を制御する例はチルト停止制御に限定されない。例えば、作業機制御部51Gは、バケット8がチルト動作することにより目標施工形状CSを侵食した場合に、バケット8を目標施工形状CSから遠ざける方向に移動させる介入制御を実行してもよい。そして、作業機制御部51Gは、作業具であるバケット8と、チルト停止地形ST及びチルト停止地形STを延長した延長停止地形STeとの距離に基づいて介入制御を実行してもよい。
In the present embodiment, as an example in which the work
本実施形態において、バケット8はチルト式バケットであるとしたが、バケット8は、例えば、ローテートバケットであってもよい。ローテートバケットは、バケット軸AX3と垂直に交わる軸線の周りを回転するバケットである。作業機制御部51Gは、ローテートバケットに対して、バケット8と、ローテート停止地形及びローテート停止地形を延長したローテート延長停止地形との距離に基づいて停止制御及び介入制御の少なくとも一方を実行してもよい。ローテート停止地形は、チルト停止地形STと同様の方法で求められる。作業機制御部51Gは、バケット8がバケット軸AX3を中心として回転する際に、バケット8と、ローテート停止地形及びローテート停止地形を延長したローテート延長停止地形との距離に基づいて停止制御及び介入制御の少なくとも一方を実行してもよい。
In the present embodiment, the
本実施形態においては、作業機械が油圧ショベルであるとしたが、実施形態で説明した構成要素は、油圧ショベルとは別の、作業機を有する作業機械に適用されてもよい。 In the present embodiment, the work machine is a hydraulic excavator, but the components described in the embodiment may be applied to a work machine having a work machine other than the hydraulic excavator.
以上、本実施形態を説明したが、前述した内容により本実施形態が限定されるものではない。また、前述した構成要素には、当業者が容易に想定できるもの、実質的に同一のもの、いわゆる均等の範囲のものが含まれる。さらに、前述した構成要素は適宜組み合わせることが可能である。さらに、本実施形態の要旨を逸脱しない範囲で構成要素の種々の省略、置換又は変更を行うことができる。 Although the present embodiment has been described above, the present embodiment is not limited by the contents described above. Further, the above-mentioned components include those that can be easily assumed by those skilled in the art, those that are substantially the same, that is, those having a so-called equal range. Furthermore, the components described above can be combined as appropriate. Further, various omissions, replacements or changes of components can be made without departing from the gist of the present embodiment.
1 作業機
2 上部旋回体
3 下部走行体
6 ブーム
7 アーム
8 バケット
8C 刃
9 刃先
11 ブームシリンダ
12 アームシリンダ
13 バケットシリンダ
14 チルトシリンダ
20 位置検出装置
30 操作装置
30T チルト操作レバー
30R 右操作レバー
50 制御装置
51 処理部
51A 車体位置データ取得部
51B 作業機角度データ取得部
51Ca 候補規定点位置データ演算部
51D 目標施工形状生成部
51Cb 規定点位置データ演算部
51E 動作平面演算部
51F 目標形状演算部
51G 作業機制御部
51H 制限速度決定部
51J 決定部
52 記憶部
53 入出力部
100 油圧ショベル
200 制御システム
300 油圧システム
400 検出システム
511 操作状態決定部
512 動作距離決定部
513 重なり決定部
514 姿勢決定部
515 第1論理積演算部
516 距離決定部
517 第2論理積演算部
AX1 ブーム軸
AX2 アーム軸
AX3 バケット軸
AX4 チルト軸
CS,CSa,CSb 目標施工形状
CT 操作状態
Da 動作距離
ST チルト停止地形
STe 延長停止地形
TP チルト動作平面
1 Working
Claims (8)
前記軸線と直交する平面から生成され、前記作業具の回転を制御する際の目標となる形状である制御目標形状と、前記制御目標形状を延長した延長目標形状を求める目標形状演算部と、
前記作業具と前記制御目標形状及び前記延長目標形状との距離に基づいて、前記軸線を中心とする前記作業具の回転を制御する作業機制御部と、を含む、
作業機械の制御システム。 A work machine control system that controls a work machine including a work machine having a work tool that rotates about an axis.
A control target shape that is generated from a plane orthogonal to the axis and is a target shape when controlling the rotation of the work tool, and a target shape calculation unit that obtains an extension target shape that is an extension of the control target shape.
A work machine control unit that controls rotation of the work tool about the axis based on the distance between the work tool and the control target shape and the extension target shape.
Work machine control system.
前記作業機制御部は、
前記決定部によって、前記延長目標形状が、前記作業機制御部が前記作業具の回転を制御する際の目標とされた場合には、前記作業具と前記制御目標形状及び前記延長目標形状との距離に基づいて、前記軸線を中心とする前記作業具の回転を制御し、
前記決定部によって、前記延長目標形状が、前記作業機制御部が前記作業具の回転を制御する際の目標とされない場合には、前記作業具と前記制御目標形状との距離に基づいて、前記軸線を中心とする前記作業具の回転を制御する、
請求項1に記載の作業機械の制御システム。 It has a determination unit for determining whether or not the extension target shape is a target when the work machine control unit controls the rotation of the work tool.
The work machine control unit
When the extension target shape is set as a target when the work equipment control unit controls the rotation of the work tool by the determination unit, the work tool, the control target shape, and the extension target shape are used. Control the rotation of the work tool around the axis based on the distance,
When the extension target shape is not set as a target when the work equipment control unit controls the rotation of the work tool by the determination unit, the extension target shape is based on the distance between the work tool and the control target shape. Controls the rotation of the work tool around the axis,
The control system for a work machine according to claim 1.
前記作業具と制御目標形状との重なり、前記作業具と制御目標形状との距離、前記作業具の姿勢及び前記作業機の操作状態に基づいて、前記延長目標形状を、前記作業具を停止させる際の目標とするか目標としないかを決定する、
請求項2に記載の作業機械の制御システム。 The decision unit
The work tool is stopped at the extension target shape based on the overlap between the work tool and the control target shape, the distance between the work tool and the control target shape, the posture of the work tool, and the operating state of the work machine. Decide whether to aim or not
The control system for a work machine according to claim 2.
前記作業具を停止させる際の目標を前記延長目標形状とする決定をする場合の前記重なりの大きさを、目標としない決定をする場合の前記重なりの大きさよりも大きくする、
請求項3に記載の作業機械の制御システム。 The decision unit
The size of the overlap when deciding that the target when stopping the work tool is the extension target shape is made larger than the size of the overlap when deciding not to set the target.
The control system for a work machine according to claim 3.
前記規定点を通り前記軸線と直交する動作平面を求める動作平面算出部と、を有し、
前記目標形状演算部は、
前記作業機械の施工対象の目標形状を示す目標施工形状と前記動作平面とが交差する部分を前記制御目標形状とし、前記制御目標形状と平行に前記制御目標形状を延長した部分を前記延長目標形状とする、
請求項1から請求項4のいずれか1項に記載の作業機械の制御システム。 A specified point position data calculation unit that obtains the position data of the specified point set in the work tool,
It has an operation plane calculation unit that obtains an operation plane that passes through the specified point and is orthogonal to the axis.
The target shape calculation unit is
The portion where the target construction shape indicating the target shape of the construction target of the work machine and the operation plane intersect is defined as the control target shape, and the portion obtained by extending the control target shape in parallel with the control target shape is the extension target shape. To
The work machine control system according to any one of claims 1 to 4.
前記上部旋回体を支持する下部走行体と、
第1の軸を中心に回転するブームと第2の軸を中心に回転するアームと第3の軸を中心に回転するバケットとを含み、前記上部旋回体に支持される作業機と、
請求項1から請求項5のいずれか1項に記載の作業機械の制御システムと、を含み、
前記作業具は前記バケット、前記アーム、前記ブーム及び前記上部旋回体の少なくとも1つである、作業機械。 With the upper swivel body,
A lower traveling body that supports the upper turning body and
A working machine that includes a boom that rotates around a first axis, an arm that rotates around a second axis, and a bucket that rotates around a third axis, and is supported by the upper swing body.
The work machine control system according to any one of claims 1 to 5, including.
A work machine in which the work tool is at least one of the bucket, the arm, the boom, and the upper swing body.
請求項6に記載の作業機械。 The work tool is the bucket, and the axis line is orthogonal to the third axis.
The work machine according to claim 6.
前記軸線と直交する平面から生成され、前記作業具の回転を制御する際の目標となる形状である制御目標形状と、前記制御目標形状を延長した延長目標形状を求めることと、
前記作業具と前記制御目標形状及び前記延長目標形状との距離に基づいて、前記軸線を中心とする前記作業具の回転を制御することと、を含む、
作業機械の制御方法。 It is a control method of a work machine that controls a work machine including a work machine having a work tool that rotates around an axis.
Obtaining a control target shape that is generated from a plane orthogonal to the axis and is a target shape when controlling the rotation of the work tool, and an extension target shape that is an extension of the control target shape.
It includes controlling the rotation of the work tool about the axis based on the distance between the work tool and the control target shape and the extension target shape.
How to control the work machine.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017030337A JP6781068B2 (en) | 2017-02-21 | 2017-02-21 | Work machine control system, work machine and work machine control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017030337A JP6781068B2 (en) | 2017-02-21 | 2017-02-21 | Work machine control system, work machine and work machine control method |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016544687A Division JP6099835B1 (en) | 2016-05-31 | 2016-05-31 | Work machine control system, work machine, and work machine control method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017214817A JP2017214817A (en) | 2017-12-07 |
| JP2017214817A5 JP2017214817A5 (en) | 2019-06-27 |
| JP6781068B2 true JP6781068B2 (en) | 2020-11-04 |
Family
ID=60576648
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017030337A Active JP6781068B2 (en) | 2017-02-21 | 2017-02-21 | Work machine control system, work machine and work machine control method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6781068B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024225453A1 (en) * | 2023-04-28 | 2024-10-31 | 住友重機械工業株式会社 | Shovel, remote operation system, and control method |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7396875B2 (en) * | 2019-11-27 | 2023-12-12 | 株式会社小松製作所 | Work machine control system, work machine, and work machine control method |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3247464B2 (en) * | 1992-12-28 | 2002-01-15 | 日立建機株式会社 | Excavation control system for hydraulic excavator |
| DE112014000106B4 (en) * | 2014-06-02 | 2017-04-06 | Komatsu Ltd. | Construction machine control system, construction machine and method of controlling a construction machine |
-
2017
- 2017-02-21 JP JP2017030337A patent/JP6781068B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024225453A1 (en) * | 2023-04-28 | 2024-10-31 | 住友重機械工業株式会社 | Shovel, remote operation system, and control method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017214817A (en) | 2017-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6099835B1 (en) | Work machine control system, work machine, and work machine control method | |
| JP6046320B1 (en) | Construction machine control system, construction machine, and construction machine control method | |
| KR101839467B1 (en) | Construction machinery control system, construction machinery, and construction machinery control method | |
| KR101443769B1 (en) | Hydraulic shovel position guide system and method for controlling same | |
| KR101907938B1 (en) | Control device for construction machine and method of controlling construction machine | |
| CN109154150B (en) | Control system for construction machine, and control method for construction machine | |
| KR20130113515A (en) | Excavation control system and construction machinery | |
| KR102166900B1 (en) | Work machine control device and working machine | |
| KR101840248B1 (en) | Work machinery control system, work machinery, and work machinery control method | |
| JP6781068B2 (en) | Work machine control system, work machine and work machine control method | |
| JP6781067B2 (en) | Construction Machinery Control Systems, Construction Machinery, and Construction Machinery Control Methods | |
| JP6680849B2 (en) | Work machine control system and work machine control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190523 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200421 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200617 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201006 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201015 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6781068 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |