JP6765249B2 - Industrial robot - Google Patents
Industrial robot Download PDFInfo
- Publication number
- JP6765249B2 JP6765249B2 JP2016150159A JP2016150159A JP6765249B2 JP 6765249 B2 JP6765249 B2 JP 6765249B2 JP 2016150159 A JP2016150159 A JP 2016150159A JP 2016150159 A JP2016150159 A JP 2016150159A JP 6765249 B2 JP6765249 B2 JP 6765249B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- rotation axis
- base
- link mechanism
- pivotally attached
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000009434 installation Methods 0.000 claims description 25
- 239000012636 effector Substances 0.000 claims description 3
- 210000000707 wrist Anatomy 0.000 description 9
- 238000003466 welding Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
Images






Landscapes
- Manipulator (AREA)
Description
本発明は、基台と、該基台に回動自在に枢着されたリンク機構と、該リンク機構に回動自在に枢着されたアームと、を少なくとも備えた産業用ロボットに関する。 The present invention relates to an industrial robot including at least a base, a link mechanism rotatably pivoted to the base, and an arm rotatably pivoted to the link mechanism.
従来から、部材の溶接・搬送等に、多関節を有した産業用ロボットが利用されている。産業用ロボットは、基台に枢着されたリンク機構を備えており、そのリンク機構には、ロボットの腕部に相当するアームが、回動自在に枢着されている。 Conventionally, industrial robots having articulated joints have been used for welding and transporting members. The industrial robot is provided with a link mechanism pivotally attached to a base, and an arm corresponding to an arm portion of the robot is rotatably pivotally attached to the link mechanism.
このような産業用ロボットとして、例えば特許文献1には、設置面に設置された基台と、基台にリンク機構を枢着された産業用ロボットが提案されている。このリンク機構は、基台に一端が回動自在に枢着され第1下腕および第2下腕と、第1下腕および第2下腕の他端に回動自在に枢着された上部基台とを備えている。
As such an industrial robot, for example,
この産業用ロボットは、リンク機構の上部基台に回動自在に枢着された上腕部をさらに備えており、基台と第1下腕部とが相対的に回動する第1回転軸と、基台と第2下腕部とが相対的に回動する第2回転軸とが、設置面から同じ高さになっている。 This industrial robot further includes an upper arm portion rotatably pivotally attached to the upper base of the link mechanism, and a first rotation shaft in which the base and the first lower arm portion rotate relative to each other. The second rotating shaft, on which the base and the second lower arm rotate relative to each other, is at the same height from the installation surface.
しかしながら、発明者らの見解によれば、特許文献1に示す産業用ロボットでは、リンク機構の上部基台に回動自在に枢着された上腕部(アーム)の先端の移動範囲が、十分でないことがあった。
However, according to the views of the inventors, in the industrial robot shown in
この場合、リンク機構の各アームの長さをより長くすることにより、リンク機構の可動範囲を大きくし、基台に対して、リンク機構に枢着された上腕部(アーム)の先端の移動範囲を広げることができる。しかしながら、このような対策を講じてしまうと、産業用ロボット自体が大型化してしまう。 In this case, by increasing the length of each arm of the link mechanism, the movable range of the link mechanism is increased, and the moving range of the tip of the upper arm portion (arm) pivotally attached to the link mechanism with respect to the base. Can be expanded. However, if such measures are taken, the industrial robot itself will become large.
本発明は、このような点を鑑みてなされたものであり、その目的とするところは、装置を大型化することなく、リンク機構に回動自在に枢着されたアームの先端を、大きく移動させることができる産業用ロボットを提供することにある。 The present invention has been made in view of these points, and an object of the present invention is to move the tip of an arm rotatably pivotally attached to a link mechanism to a large extent without increasing the size of the device. The purpose is to provide an industrial robot that can be made to operate.
発明者らは、鋭意検討を重ねた結果、産業用ロボットに枢着されたリンク機構の2つのアームの回転軸に着眼した。具体的には、基台に対して回動するこの2つのアームの回転軸の位置関係を、設置面に対して異なる位置(異なる高さ)にすることにより、基台に対するリンク機構の移動範囲が、大きく変化するとの新たな知見を得た。 As a result of diligent studies, the inventors focused on the rotation axes of the two arms of the link mechanism pivotally attached to the industrial robot. Specifically, by setting the positional relationship between the rotation axes of these two arms that rotate with respect to the base to different positions (different heights) with respect to the installation surface, the range of movement of the link mechanism with respect to the base However, I got a new finding that it will change significantly.
本発明は、発明者らの新たな知見によるものであり、本発明に係る産業用ロボットは、設置面に設置された基台と、前記基台に一端が回動自在に枢着された第1アームおよび第2アームと、前記第1アームおよび前記第2アームの他端に回動自在に枢着された第3アームと、を有するリンク機構と、前記第1アーム側において、前記リンク機構に対して回動自在に枢着された第4アームと、を備えており、前記第1アームと前記基台が相対的に回動する第1回転軸よりも、前記第2アームと前記基台が相対的に回動する第2回転軸の方が、前記設置面から高い位置にあることを特徴とする。 The present invention is based on a new finding of the inventors, and the industrial robot according to the present invention has a base mounted on an installation surface and a base whose one end is rotatably pivotally attached to the base. A link mechanism having a first arm and a second arm, a third arm rotatably pivotally attached to the other end of the first arm and the second arm, and the link mechanism on the first arm side. The second arm and the base are provided with a fourth arm rotatably pivoted to the base, rather than a first rotation axis in which the first arm and the base rotate relative to each other. The second rotating shaft, in which the table rotates relatively, is characterized in that it is located at a higher position than the installation surface.
本発明によれば、設置面から第1回転軸よりも、第2回転軸の方が、設置面から高い位置となるように、第1アームおよび第2アームを、基台に回動自在に枢着させている。したがって、リンク機構を可動させた際に、設置面に対して同じ高さの第1および第2回転軸を有するものに比べて、第1アーム側へのリンク機構の可動範囲を広げることができる。これにより、装置を大型化することなく、第1アーム側において、リンク機構に対して回動自在に枢着された第4アームの先端を、大きく移動させることができる。 According to the present invention, the first arm and the second arm can be rotated around the base so that the second rotating shaft is higher than the first rotating shaft from the installation surface. It is pivoted. Therefore, when the link mechanism is moved, the movable range of the link mechanism toward the first arm side can be expanded as compared with the one having the first and second rotation axes at the same height with respect to the installation surface. .. As a result, the tip of the fourth arm rotatably pivotally attached to the link mechanism can be largely moved on the first arm side without increasing the size of the device.
ここで、第1回転軸と第2回転軸が、上述した位置関係を満たしていれば、リンク機構の第1アームおよび第2アームに対する第3アームの回転軸は、特に限定されるものではない。しかしながら、より好ましい態様としては、前記第1アームおよび前記第2アームが前記設置面に対して直交する方向に沿って起立した姿勢において、前記第1アームと前記第3アームが回動する第3回転軸よりも、前記第2アームと前記第3アームが回動する第4回転軸の方が、前記設置面から高い位置にある。 Here, as long as the first rotation axis and the second rotation axis satisfy the above-mentioned positional relationship, the rotation axes of the third arm with respect to the first arm and the second arm of the link mechanism are not particularly limited. .. However, in a more preferred embodiment, the first arm and the third arm rotate in a posture in which the first arm and the second arm stand up along a direction orthogonal to the installation surface. The fourth rotating shaft on which the second arm and the third arm rotate is located higher than the rotating shaft on the installation surface.
この態様によれば、設置面から第3回転軸よりも、第4回転軸の方が、設置面から高い位置となるように、第3アームを、第1アームおよび第2アームに回動自在に枢着させているので、第1アームが枢動する範囲をより広げることができる。この結果、第1アーム側において、リンク機構に対して回動自在に枢着された第4アームの先端を、より大きく移動させることができる。 According to this aspect, the third arm can be rotated to the first arm and the second arm so that the fourth rotation axis is higher than the third rotation axis from the installation surface. Since it is pivotally attached to, the range in which the first arm can move can be further expanded. As a result, on the first arm side, the tip of the fourth arm rotatably pivotally attached to the link mechanism can be moved more greatly.
さらに好ましい態様としては、前記第1回転軸から前記第3回転軸までの距離と、前記第2回転軸から前記第4回転軸までの距離とが、等しい。これにより、第1アーム、第2アーム、および第3アームからなるリンク機構を平行リンク機構にすることができる。これにより、第1アームの枢動する範囲をさらに広げることができ、第4アームの先端を、さらに大きく移動させることができる。 In a more preferred embodiment, the distance from the first rotation axis to the third rotation axis is equal to the distance from the second rotation axis to the fourth rotation axis. As a result, the link mechanism including the first arm, the second arm, and the third arm can be made into a parallel link mechanism. As a result, the pivotal range of the first arm can be further expanded, and the tip of the fourth arm can be moved even more.
ここで、第4アームは、第1アームの他端側において、リンク機構に回動自在に枢着されているのであれば、その配置される位置は特に限定されるものではない。しかしながら、より好ましい態様としては、前記第1アームの他端において、前記第1アームの一方側に前記第3アームが配置され、前記第1アームの他方側に前記第4アームが配置されている。 Here, the position where the fourth arm is arranged is not particularly limited as long as it is rotatably pivotally attached to the link mechanism on the other end side of the first arm. However, in a more preferred embodiment, at the other end of the first arm, the third arm is arranged on one side of the first arm, and the fourth arm is arranged on the other side of the first arm. ..
この態様によれば、第1アームを挟んだ位置に、第3アームと第4アームが配置されることになるので、リンク機構の可動とともに第4アームがリンク機構に対して枢動しても、第3アームと第4アームとが機械的に干渉し難い。これにより、リンク機構に対する第4アームの枢動が起因として、リンク機構の可動範囲に制限を設けなくてもよい。 According to this aspect, since the third arm and the fourth arm are arranged at the positions sandwiching the first arm, even if the fourth arm pivots with respect to the link mechanism as the link mechanism moves. , The third arm and the fourth arm are less likely to interfere mechanically. As a result, it is not necessary to limit the movable range of the link mechanism due to the pivotal movement of the fourth arm with respect to the link mechanism.
本発明によれば、装置を大型化することなく、リンク機構に回動自在に枢着されたアームを、その先端側により大きく移動させることができる。 According to the present invention, the arm rotatably pivotally attached to the link mechanism can be moved more greatly to the tip end side without increasing the size of the device.
以下に、本発明の実施形態に係る産業用ロボット(以下、ロボットという)を図1〜図9を参照しながら詳述する。 The industrial robot (hereinafter referred to as a robot) according to the embodiment of the present invention will be described in detail below with reference to FIGS. 1 to 9.
1.ロボット1の全体構成
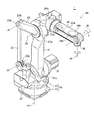
図1〜図6に示すように、ロボット1は、マニュピュレータであり、基台10と、基台10に取付けられたリンク機構20と、リンク機構20に取付けられた手首組立体30と、を備えている。
1. 1. Overall Configuration of
1−1.基台10
基台10は、設置面Fに設置されており、設置面Fに固定された固定台11と、設置面Fに対して直交する方向に沿った旋回軸Jaの周りに旋回する旋回台12とを備えている。旋回台12は、固定台11に固定されたモータの出力軸(図示せず)が接続されている。これにより、旋回台12を固定台11に対して旋回軸Jaの周りに旋回する。
1-1.
The
1−2.リンク機構20
リンク機構20は、第1〜第3アーム21〜23を備えている。第1アーム21は、ロボット1の前方側、すなわち、手首組立体30側において、基台10の旋回台12に回動自在に枢着されている。具体的には、第1アーム21の一端(基端部)には、連接部21aが形成されており、連接部21aは基台10の旋回台12に接続されている。これにより、第1アーム21は、旋回軸Jaと直交する第1回転軸J1の周りに、基台10に対して枢動自在(回転自在)となる。
1-2.
The
第1アーム21は、リンク機構20に枢着された第4アーム24から先端側の部材を支持する支持アームであり、リンク機構20の他のアームよりも剛性が高い。具体的には、第1アーム21は、第2アーム22および第3アーム23に比べて、第1回転軸J1に沿った方向の最大の厚みが大きい。
The
第2アーム22は、ロボット1の後方側において、基台10の旋回台12に、回動自在に枢着されている。具体的には、第2アーム22の一端(基端部)には、連接部22aが形成されており、連接部22aは基台10の旋回台12に接続されている。これにより、第2アーム22は、第1回転軸J1と平行となる第2回転軸J2の周りに、基台10に対して枢動自在(回転自在)となる。さらに、第1アーム21および第2アーム22は、旋回軸Jaに対して一方側にオフセットした位置に配置されている。これにより、第4アーム24と基台10との間に空間が形成されるため、第4アーム24の可動範囲を確保することができる。
The
第3アーム23は、その両端部において、第1アーム21の他端(先端部)および第2アームの他端(先端部)に、回動自在に枢着されている。具体的には、第3アーム23の一端には、後述するように、第1アーム21に連接される連接部に相当する関節シャフト23aが形成されている。関節シャフト23aは、第1アーム21の他端に形成された連接部に相当する受け部21bに収容されている。これにより、第3アーム23は、第1回転軸J1と平行となる第3回転軸J3の周りに、第1アーム21に対して枢動自在(回転自在)となり、第1アーム21により軸支される。
The
一方、第3アーム23の他端には、第2アーム22の他端(先端部)に形成された連接部22bに接続される連接部23bが形成されている。これにより、第3アーム23は、第3回転軸J3と平行となる第4回転軸J4の周りに、第2アーム22に対して枢動自在(回転自在)となる。なお、第2アーム22および第3アーム23は、第1アーム21の枢動を安定させるための補助アームである。
On the other hand, at the other end of the
本実施形態では、リンク機構20を水平方向から見て(ロボット1の側面視において)、第1回転軸J1から第3回転軸J3までの距離と、第2回転軸J2から第4回転軸J4までの距離は、等しくなっている。さらに、第1回転軸J1から第2回転軸J2までの距離は、第3回転軸J3から第4回転軸J4までの距離と、等しくなっている。これにより、リンク機構20は、平行リンク機構となり、動作時に、第1アーム21と第2アーム22とが平行な位置関係となるように保持され、リンク機構20の可動範囲を広げることができる。
In the present embodiment, when the
さらに、図2および図6に示すように、第1アーム21の一端(基端部)には、第1回転軸J1の周りに回転する第1モータ31が接続されており、第1モータ31の出力により、第1アーム21が基台10に対して相対的に枢動(回動)する。この第1アーム21の枢動に伴い、第1アーム21に枢着された第3アーム23および第3アーム23に枢着された第2アーム22がそれぞれ、各回転軸の周りに相対的に枢動し、ロボット1の前後方向に、リンク機構20を動作させることができる。
Further, as shown in FIGS. 2 and 6, a
1−3.手首組立体30
さらに、リンク機構20には、手首組立体30が枢動自在に取り付けられている。具体的には、手首組立体30は、第4アーム(アッパーアーム)24を備えており、第4アーム24は、リンク機構20に対して、回動自在に枢着されている。第4アーム24は、ロボット1の腕部に相当するアーム本体24aと、ロボット1の肘部に相当し、リンク機構20に連接された連接部24bとを備えている。
1-3.
Further, the
図5に示すように、第4アーム24の連接部24bは、第1アーム21の他端において、第1アーム21に対して第3アーム23が配置される側を一方側としたときに、第1アーム21の他方側に配置されるように、リンク機構20に対して回動自在に枢着されている。
As shown in FIG. 5, the connecting
具体的には、第4アーム24の連接部24bは、第3アーム23の関節シャフト23aに対して、第3回転軸J3の周りに回動自在に枢着されている。本実施形態では、図4および図5に示すように、第3アーム23に対する第1アーム21および第4アーム24の回転軸は、第3回転軸J3で同じ回転軸である。
Specifically, the connecting
ここで、第3アーム23に対する第4アーム24の枢動は、第2モータ32により行われる。第2モータ32は、第4アーム24の連接部24bに固定されており、第2モータ32の出力軸32bは、第4回転軸J4の周りに枢動するように第3アーム23に接続される(たとえば図7参照)。これにより、第3アーム23に対して、第4アーム24を第2モータ32の本体と共に回動させることができる。
Here, the pivoting of the
第4アーム24のアーム本体24aは、連接部24bに対して、軸心に沿った回動軸Jbの周りに回動自在に接続(連接)されている。図3に示すように、連接部24bには、第3モータ33が固定されており、第3モータ33の出力軸(図示せず)は、回動軸Jbにアーム本体24aが回動するようにアーム本体24aに接続されている。この第3モータ33の駆動により、アーム本体24aを、連接部24bに対して、回動軸Jbの周りに回動させることができる。
The
本実施形態では、回動軸Jbと、旋回軸Jaとは、ロボット1の動作に拘わらず、同一平面上に配置されている。これにより、旋回台12が旋回する中心軸である旋回軸Jaに、回動軸Jbが交差するので、旋回台12の旋回動作に拘わらず、第4アーム24を回動軸Jbの周りに安定して動作させることができる。
In the present embodiment, the rotation shaft Jb and the rotation shaft Ja are arranged on the same plane regardless of the operation of the
さらに、アーム本体24aの先端には、ロボット1の手首部に相当する一対の把持部24c,24cが形成されており、これらの間に、溶接トーチなどのエンドエフェクタ(図示せず)を支持する支持アーム25が取付けられている。支持アーム25は、アーム本体24aに内蔵されたモータおよび動力伝津ベルト等により、第4アーム24に対して、揺動軸Jcの周りを揺動(回動)するとともに、エンドエフェクタが取付けられる支持アーム25の先端部が回動軸Jdの周りに回動するように構成されている。
Further, a pair of
なお、ロボット1の手首組立体30には、電源ケーブル41を介して、電力が供給される(図7参照)。これにより、各モータに電力が供給され、回動軸Jb,Jd,および揺動軸Jcの周りの回動動作を実現することができる。
Power is supplied to the
2.第1〜第4回転軸J1〜J4の位置関係
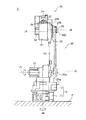
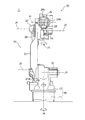
上述したように、第1〜第4回転軸J1〜J4は、図3および図4に示すように、水平方向に沿って同じ方向に延在している。本実施形態では、図1および図2に示すように、リンク機構20の側面視において、第1アーム21と基台10が相対的に回動する第1回転軸J1よりも、第2アーム22と基台10が相対的に回動する第2回転軸J2の方が、設置面Fから高い位置にある。具体的には、第2回転軸J2は、第1回転軸J1よりも、長さd1だけ、高い位置にある。
2. Positional relationship of the first to fourth rotation axes J1 to J4 As described above, the first to fourth rotation axes J1 to J4 extend in the same direction along the horizontal direction as shown in FIGS. 3 and 4. are doing. In the present embodiment, as shown in FIGS. 1 and 2, in the side view of the
これにより、図8に示すように、リンク機構20を可動させた際に、第1アーム21側(ロボット1の前方側)へのリンク機構20の可動範囲を広げることができる。これまでは、図9(b)に示すように、設置面Fに対して同じ高さの第1回転軸J1および第2回転軸J2のリンク機構20’を採用していた。この場合、第1アーム21が設置面Fに対して起立した状態から、リンク機構20’を第1アーム21側(ロボット1の前方側)へ枢動させると、第1アーム21の枢動する角度は、角度θ2となる。
As a result, as shown in FIG. 8, when the
しかしながら、図9(a)に示すように、本実施形態では、リンク機構20は、第1回転軸J1よりも、第2回転軸J2の方が、設置面Fから高い位置にある。したがって、第1アーム21が設置面Fに対して起立した状態から、リンク機構20を第1アーム21側(ロボット1の前方側)へ枢動させると、第1アーム21の枢動する角度は、上述したθ2よりも大きい角度θ1となる。このような結果、図9(b)に示す場合に比べて、第1アーム21側(ロボット1の前方側)へのリンク機構20の可動範囲が広くなる。
However, as shown in FIG. 9A, in the present embodiment, the
このような結果、装置を大型化することなく、図8に示すように、第1アーム21側において、リンク機構20に対して回動自在に枢着された第4アーム24の先端および支持アーム25を、より大きく移動させることができる。
As a result, as shown in FIG. 8, the tip and support arm of the
さらに、図1および図2では、ロボット1は、第1アーム21および第2アーム22が設置面Fに対して直交する方向に沿って起立した姿勢にある。この姿勢において、第1アーム21と第3アーム23が回動する第3回転軸J3よりも、第2アーム22と第3アーム23が回動する第4回転軸J4の方が、設置面Fから高い位置にある。第4回転軸J4は、第3回転軸J3よりも、長さd2だけ、高い位置にある。
Further, in FIGS. 1 and 2, the
このように、第3回転軸J3と第4回転軸J4の位置関係を満たしつつ、第3アーム23を、第1アーム21および第2アーム22に回動自在に枢着させているので、第1アーム21を、ロボット1の前方側に、より大きく枢動させることができる。
In this way, the
このような結果、第1アーム21側において、リンク機構20に対して第4アーム24を、その先端側により大きく移動させることができる。特に、本実施形態では、長さd1と長さd2を等しくすることにより、第1回転軸J1から第3回転軸J3までの距離と、第2回転軸J2から第4回転軸J4までの距離が等しくなる。これにより、第1アーム21を、ロボット1の前方側に、さらに大きく枢動させることができる。
As a result, on the
3.第4アーム24の取付け構造およびリンク機構20との位置関係
上述したように、本実施形態では、第1アーム21は、第1アーム21の一方側から、第3アーム23の関節シャフト23aを受ける受け部21bにより、軸受6を介して第3アーム23を軸支している(図3および図7等参照)。このようにして、第1アーム21の一方側において、第3アーム23は第1アーム21に対して、第3回転軸J3の周りに回動自在に、枢着されている。
3. 3. Mounting structure of the
受け部21bは、第3アーム23の関節シャフト23aを収容する空洞部分を有した略円筒状の部分である。関節シャフト23aは、第1アーム21の受け部21bの内部に収容された状態で、第3アーム23が第1アーム21に対して回動自在であれば、円柱状または円筒状のいずれの形状であってもよい。また、関節シャフト23aは、第3アーム23に対して着脱自在な構造であってもよい。
The receiving
さらに、図7に示すように、第4アーム24の連接部24bは、上述した如く、第1アーム21の他方側において、第3アーム23の関節シャフト23aに対して、第3回転軸J3の周りに回動自在に枢着されている。具体的には、上述した如く、第1アーム21の受け部21bに収容された、第3アーム23の関節シャフト23aに、第2モータ32を介して第4アーム24の連接部24bが回動自在に枢着されている。
Further, as shown in FIG. 7, as described above, the connecting
このような構造を採用することにより、ロボット1は、第1アーム21の他端(先端部)において、第1アーム21の一方側に第3アーム23を配置し、第1アーム21の他方側に前記第4アーム24を配置することができる。さらに、第4アーム24を、第3アーム23に回動自在に枢着させることができる。
By adopting such a structure, the
したがって、第1アーム21を挟んで、第3アーム23と第4アーム24とが配置されているので、第3アーム23と第4アーム24との機械的な干渉を回避することができる。特に、第1アーム21は、第4アーム24から先端側を支持する支持アームであるため、上述した如く、第3アーム23よりもその最大の厚みが厚い。このため、第3アーム23と第4アーム24とは、第1アーム21の厚み分、離間して配置されるため、第3アーム23に対して、第1アーム21と第4アーム24とを挟み込むように配置した場合に比べて、第3アーム23と第4アーム24の機械的な干渉を回避することができる。
Therefore, since the
また、第1アーム21と第4アーム24とは、直接的に枢動することはない。すなわち、第1モータ31の動力が、第1アーム21を介して、第4アーム24に直接的に伝達されることがないので、第2モータ32の動力を効率的に、第3アーム23に枢着された第4アーム24に伝達することができる。
Further, the
なお、図3および図7に示すように、本実施形態では、第1アーム21の受け部21bと第4アームの連接部24bとにより、電源ケーブル41を収容する空間Sが形成されている。第4アーム24の連接部24bにカバー61を取り付けることにより、空間Sを覆っている。このような構造を採用することにより、第1アーム21の他方側において、第1アーム21と第3アーム23との相対的な枢動に影響を受けず、電源ケーブル41を空間Sに収容することができる。
As shown in FIGS. 3 and 7, in the present embodiment, the receiving
さらに、本実施形態では、図7に示すように、第3アーム23の関節シャフト23aを、第1アーム21の受け部21bが収容し、第3アーム23の関節シャフト23aに、第2モータ32の出力軸32bを介して、第3アーム23が連結されている。これにより、第1アーム21と第3アーム23が回動する回転軸と、第3アーム23と第4アーム24とが回動する回転軸とは、同じ第3回転軸J3となる。
Further, in the present embodiment, as shown in FIG. 7, the
このように、第1アーム21と第3アーム23とが相対的に回動する回転軸と、第3アームと第4アームとが相対的に回動する回転軸とを一致させることにより、ロボット1を稼働した際に、これらアームの相対的な回動を安定させることができる。さらに、共通した第3回転軸J3でこれらアームを回転させるので、これらアーム同士の機械的干渉を抑える構造を採用することができる。これにより、リンク機構20に対する第4アーム24の枢動が起因して、リンク機構20の可動範囲に制限を設けなくてもよい。
In this way, by matching the rotation axis in which the
さらに、本実施形態では、上述したように、基台10の旋回軸Jaと、第4アーム24の回動軸Jbとは、同一平面上に配置されている(図1および図4等参照)。これに加えて、第1アーム21の他方側に第4アーム24が配置されているので、基台10と第4アーム24との間には、空間が形成される(図4および図6参照)。このような結果、第4アーム24を含む手首組立体30の移動範囲をより広げることができるとともに、旋回台12の旋回動作に拘わらず、第4アーム24を回動軸Jbの周りに安定して動作させることができる。
Further, in the present embodiment, as described above, the swivel shaft Ja of the
以上、本発明の実施形態について詳述したが、本発明は、前記の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の精神を逸脱しない範囲で、種々の設計変更を行うことができるものである。 Although the embodiments of the present invention have been described in detail above, the present invention is not limited to the above-described embodiments, and various designs are designed without departing from the spirit of the present invention described in the claims. You can make changes.
1:ロボット(産業用ロボット)、10:基台、11:固定台、12:旋回台、20:リンク機構、21:第1アーム、21b:受け部、22:第2アーム、23:第3アーム、23a:関節シャフト、24:第4アーム、25:支持シャフト、30:手首組立体、41:電源ケーブル、設置面F、J1〜J4:第1〜第4回転軸、Ja:旋回軸、Jb:第5回動軸 1: Robot (industrial robot), 10: Base, 11: Fixed base, 12: Swing base, 20: Link mechanism, 21: 1st arm, 21b: Receiving part, 22: 2nd arm, 23: 3rd Arm, 23a: Joint shaft, 24: 4th arm, 25: Support shaft, 30: Wrist assembly, 41: Power cable, Installation surface F, J1 to J4: 1st to 4th rotation axes, Ja: Swivel axis, Jb: 5th rotation shaft
Claims (4)
前記基台に一端が回動自在に枢着された第1アームおよび第2アームと、前記第1アームおよび前記第2アームの他端に回動自在に枢着された第3アームと、を有するリンク機構と、
前記第1アーム側において、前記リンク機構に対して回動自在に枢着された第4アームと、を備えており、
前記第1アームと前記基台が相対的に回動する第1回転軸よりも、前記第2アームと前記基台が相対的に回動する第2回転軸の方が、前記設置面から高い位置にあり、
前記第1アームおよび前記第2アームが前記設置面に対して直交する方向に沿って起立した姿勢において、前記第1アームと前記第3アームが回動する第3回転軸よりも、前記第2アームと前記第3アームが回動する第4回転軸の方が、前記設置面から高い位置にあり、
前記第1回転軸から前記第3回転軸までの距離と、前記第2回転軸から前記第4回転軸までの距離とが、等しく、
前記基台は、設置面に対して固定された固定台と、前記リンク機構を枢着するとともに、該固定台に対して旋回軸の周りに旋回する旋回台と、を備えており、
前記第4アームは、アーム本体と、該アーム本体の軸心を回動軸として、該回動軸の周りに、前記アーム本体を回動自在に連接するとともに、前記第3アームに回動自在に枢着された連接部と、を備えており、
前記旋回軸と、前記回動軸とは、同一平面上に配置されていることを特徴とする産業用ロボット。 The base installed on the installation surface and
A first arm and a second arm whose one end is rotatably pivotally attached to the base, and a third arm which is rotatably pivotally attached to the other end of the first arm and the second arm. With the link mechanism
On the first arm side, a fourth arm rotatably pivotally attached to the link mechanism is provided.
The second rotating shaft in which the second arm and the base rotate relative to each other is higher than the first rotating shaft in which the first arm and the base rotate relative to each other. position near is,
In a posture in which the first arm and the second arm stand up along a direction orthogonal to the installation surface, the second arm is more than a third rotation axis on which the first arm and the third arm rotate. The fourth rotating shaft on which the arm and the third arm rotate is located higher than the installation surface.
The distance from the first rotation axis to the third rotation axis and the distance from the second rotation axis to the fourth rotation axis are equal.
The base includes a fixed base fixed to an installation surface and a swivel base that pivotally attaches the link mechanism and swivels around a swivel shaft with respect to the fixed base.
The fourth arm is rotatably connected to the arm body and the arm body around the rotation axis with the axis of the arm body as a rotation axis, and is rotatable to the third arm. It has an articulation part, which is pivotally attached to the
An industrial robot characterized in that the swivel shaft and the swivel shaft are arranged on the same plane .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016150159A JP6765249B2 (en) | 2016-07-29 | 2016-07-29 | Industrial robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016150159A JP6765249B2 (en) | 2016-07-29 | 2016-07-29 | Industrial robot |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018015871A JP2018015871A (en) | 2018-02-01 |
| JP6765249B2 true JP6765249B2 (en) | 2020-10-07 |
Family
ID=61075637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016150159A Active JP6765249B2 (en) | 2016-07-29 | 2016-07-29 | Industrial robot |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6765249B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102135216B1 (en) * | 2018-10-19 | 2020-07-20 | 하이윈 테크놀로지스 코포레이션 | Robotic arm |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001138274A (en) * | 1999-11-10 | 2001-05-22 | Meidensha Corp | Robot device |
| JP2007089465A (en) * | 2005-09-28 | 2007-04-12 | Iseki & Co Ltd | Arm-type working implement for working vehicle |
| JP2011031372A (en) * | 2009-08-06 | 2011-02-17 | Yaskawa Electric Corp | Industrial robot |
-
2016
- 2016-07-29 JP JP2016150159A patent/JP6765249B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018015871A (en) | 2018-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4971984B2 (en) | Robot joint structure | |
| JP5884785B2 (en) | robot | |
| JP5949693B2 (en) | robot | |
| JP5499647B2 (en) | Robot and robot system | |
| JP3952955B2 (en) | Articulated robot | |
| US20130142608A1 (en) | Parallel mechanism | |
| JP6494647B2 (en) | Articulated arm robot type device | |
| JP6443875B2 (en) | Robot arm mechanism | |
| US20090060684A1 (en) | Robot | |
| JP5888988B2 (en) | Industrial robot | |
| TW201932256A (en) | An industrial robot arm | |
| US20140196561A1 (en) | Robot | |
| US20110072929A1 (en) | Parallel mechanism and moveable linkage thereof | |
| JP2003039352A (en) | Robot | |
| JP6765249B2 (en) | Industrial robot | |
| JP2007144559A (en) | Multi-articulated robot | |
| US20100271540A1 (en) | Eyeball device for use in robots | |
| US11338453B2 (en) | Joint structure for robot | |
| JP6765251B2 (en) | Industrial robot | |
| JP6398905B2 (en) | robot | |
| JP2012240180A (en) | Double-arm robot | |
| JP2012192499A (en) | Parallel link robot | |
| JP6765250B2 (en) | Industrial robot | |
| TW201408420A (en) | Handling device | |
| WO2017188406A1 (en) | Rotary joint mechanism |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190529 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200722 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200901 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200915 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6765249 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |