JP6676397B2 - Phase change unit and valve timing change device - Google Patents
Phase change unit and valve timing change device Download PDFInfo
- Publication number
- JP6676397B2 JP6676397B2 JP2016021608A JP2016021608A JP6676397B2 JP 6676397 B2 JP6676397 B2 JP 6676397B2 JP 2016021608 A JP2016021608 A JP 2016021608A JP 2016021608 A JP2016021608 A JP 2016021608A JP 6676397 B2 JP6676397 B2 JP 6676397B2
- Authority
- JP
- Japan
- Prior art keywords
- worm wheel
- worm
- housing
- axis
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Transmission Devices (AREA)
- Valve Device For Special Equipments (AREA)
- Gear Transmission (AREA)
- Gears, Cams (AREA)
Description
本発明は、二つの回転体の回転位相を変更する位相変更ユニットに関し、特に、内燃エンジンの吸気バルブ又は排気バルブの開閉時期(バルブタイミング)を変更する際に適用される位相変更ユニット及びそれを用いたバルブタイミング変更装置に関する。 The present invention relates to a phase change unit that changes the rotational phase of two rotating bodies, and in particular, to a phase change unit that is applied when changing the opening / closing timing (valve timing) of an intake valve or an exhaust valve of an internal combustion engine, and to the phase change unit. The present invention relates to a valve timing changing device used.
従来のバルブタイミング変更装置としては、カムシャフトの中心軸線回りに回転するスプロケット及び内歯車、中心軸線に対して偏心する偏心軸、偏心軸の回りに回動自在に支持されると共に内歯車に噛合する遊星歯車、カムシャフトに連結されると共に遊星歯車に係合することで遊星歯車の回転に伴いカムシャフトと一体的に回転する出力軸、偏心軸に連結される作用軸、作用軸にトルクを付与する電磁部等を備えたものが知られている(例えば、特許文献1を参照)。 Conventional valve timing changing devices include a sprocket and an internal gear that rotate around a central axis of a camshaft, an eccentric shaft that is eccentric with respect to the central axis, and are rotatably supported around an eccentric shaft and mesh with the internal gear. The output shaft, which is connected to the camshaft while being connected to the camshaft and engages with the planetary gear, rotates integrally with the camshaft as the planetary gear rotates. A device provided with an electromagnetic unit or the like to be applied is known (for example, see Patent Document 1).
上記バルブタイミング変更装置においては、スプロケットとカムシャフトとの相対的な回転位相を変更する位相変更ユニットとして、サイクロ減速機構である内接式遊星歯車機構を採用するものである。
しかしながら、このような内接式遊星歯車機構では、歯車として、平歯やはすば歯車の組合せにより構成されているため、減速比を大きくするには限界がある。
また、上記の内接式遊星歯車機構では、小型化するには限界があり、又、歯車伝達のためバックラッシが生じて、電磁部の回転方向を変更する際に、歯車同士の衝突音や振動を生じる。
In the above valve timing changing device, an internal planetary gear mechanism, which is a cyclo reduction mechanism, is adopted as a phase changing unit for changing a relative rotation phase between a sprocket and a camshaft.
However, in such an inscribed planetary gear mechanism, since the gear is formed by a combination of a spur gear and a helical gear, there is a limit in increasing the reduction ratio.
In addition, in the above-mentioned inscribed planetary gear mechanism, there is a limit to miniaturization, and backlash occurs due to transmission of gears, and when changing the rotation direction of the electromagnetic unit, collision noise or vibration between gears is generated. Is generated.
本発明は、上記の事情に鑑みて成されたものであり、その目的とするところは、構造の簡素化、部品点数の削減、装置の小型化等を図りつつ、位相を容易に変更でき、例えば減速機として用いる場合に減速比を大きくでき、小さい出力の電動モータ等の外力を用いて二つの回転体の回転位相を容易に変更でき、又、バックラッシを解消できる、位相変更ユニット及びそれを用いたバルブタイミング変更装置を提供することにある。 The present invention has been made in view of the above circumstances, and aims to simplify the structure, reduce the number of parts, reduce the size of the device, etc., and easily change the phase, For example, when used as a speed reducer, the reduction ratio can be increased, the rotation phase of the two rotating bodies can be easily changed using an external force of an electric motor or the like having a small output, and the backlash can be eliminated. An object of the present invention is to provide a valve timing changing device used.
本発明の位相変更ユニットは、共通の軸線上で回転する第1回転体と第2回転体の相対的な回転位相を変更する位相変更ユニットであって、第1回転体と一体的に回転するインターナルギヤと、第2回転体に固定されて一体的に回転する遊星キャリアと、上記軸線回りに回転させられるウォームを有する回転部材と、遊星キャリアにより上記軸線に対して傾斜した捻れ位置にある捻れ軸線回りに回動自在に支持されて,ウォーム及びインターナルギヤに噛合する少なくとも一つの遊星ウォームホイールとを含み、遊星ウォームホイールは、相対的に移動可能に二分割された第1ウォームホール及び第2ウォームホイールと、第1ウォームホイール及び第2ウォームホイールの間に配置されて両者の相対回転により捻れ軸線の方向にカム作用を及ぼすローディングカム機構を含む、構成となっている。 A phase changing unit according to the present invention is a phase changing unit that changes a relative rotation phase between a first rotating body and a second rotating body that rotate on a common axis, and rotates integrally with the first rotating body. An internal gear, a planetary carrier fixed to the second rotating body and integrally rotating, a rotating member having a worm rotated about the axis, and a twisted position inclined with respect to the axis by the planetary carrier. twist is rotatably supported around an axis see contains at least one planet worm wheel meshed with the worm and the internal gear, planetary worm wheel, a first worm hole which is relatively movably bisected And the second worm wheel, and the first worm wheel and the second worm wheel are disposed between the first worm wheel and the second worm wheel, and the cam rotates in the direction of the torsion axis by the relative rotation between the two. Including a boss loading cam mechanism has a structure.
この構成によれば、位相の変更を行わない場合は、回転部材に外力が及ぼされず、インターナルギヤと遊星ウォームホイールはロックされかつ遊星キャリアと第2回転体は固定されているため、第1回転体と第2回転体は、共通の軸線回りに一体的に回転する。 According to this configuration, when the phase is not changed, no external force is applied to the rotating member, the internal gear and the planetary worm wheel are locked, and the planetary carrier and the second rotating body are fixed. The rotating body and the second rotating body rotate integrally about a common axis.
一方、位相を変更する場合は、例えば電動モータ等の駆動源により、回転部材に外力を及ぼして、回転部材(及びウォーム)を軸線回りにおいて一方向又は他方向に適宜回転させる。すると、遊星ウォームホイールが、捻れ軸線回りにおいて他方向又は一方向に回転し(自転しつつ公転し)、遊星キャリア及び第2回転体が、第1回転体に対して軸線回りの一方向又は他方向に回転する。その結果、第1回転体と第2回転体との相対的な回転位相が変更される。 On the other hand, when changing the phase, for example, a driving source such as an electric motor applies an external force to the rotating member, and the rotating member (and the worm) is appropriately rotated in one direction or another direction around the axis. Then, the planet worm wheel rotates in the other direction or one direction around the torsion axis (revolves while rotating), and the planet carrier and the second rotating body move in one direction or the other around the axis with respect to the first rotating body. Rotate in the direction. As a result, the relative rotation phase between the first rotator and the second rotator is changed.
このように、位相変更ユニットとして、ウォーム(ネジ歯車)及びウォームホイール(はすば歯車)から成るウォームギヤの構造を採用するため、構造の簡素化、部品点数の削減、装置の小型化等を達成しつつ、位相を容易に変更することができる。
特に、ウォームギヤを採用することで減速比を大きくできるため、小さい出力の電動モータ等を用いて回転部材を容易に回転させることができる。それ故に、第1回転体と第2回転体の相対的な回転位相を容易に変更できる。
また、遊星ウォームホイールが軸線に対して所定角度をなす傾斜した捻れ軸線回りに回動自在であるため、遊星キャリアが回転部材のウォームに対してセルフロックするのを防止できる。それ故に、軸線回りにおける遊星ウォームホイールの公転を保証することができる。
As described above, since the worm gear structure including the worm (screw gear) and the worm wheel (helical gear) is employed as the phase changing unit, the structure is simplified, the number of parts is reduced, and the device is downsized. While the phase can be easily changed.
In particular, since the reduction ratio can be increased by employing the worm gear, the rotating member can be easily rotated using an electric motor or the like having a small output. Therefore, the relative rotation phases of the first rotator and the second rotator can be easily changed.
Further, since the planetary worm wheel is rotatable around the inclined torsional axis forming a predetermined angle with respect to the axis, the planetary carrier can be prevented from self-locking to the worm of the rotating member. Therefore, the revolution of the planetary worm wheel around the axis can be guaranteed.
ここでは、第1回転体及び第2回転体が同一方向に回転する状態において、回転部材を適宜一方向又は他方向に回転させることにより、第2回転体の回転位相を第1回転体に対して進め又は遅らせることができる。
すなわち、一方の回転体に対して他方の回転体の速度を変化させる変速機として機能させることができ、特に、一方の回転体に対して他方の回転体を減速する減速機として機能させることができる。
特に、遊星ウォームホイールが、第1ウォームホール、第2ウォームホイール、ローディングカム機構を含むため、回転部材が回転させられると、回転部材と一体的にウォームが回転し、ウォームとウォームホイールの噛合いの関係上、先ず、第1ウォームホイールと第2ウォームホイールの一方がウォームと噛合って回転する。このとき、第1ウォームホイールと第2ウォームホイールの間に相対的な回転を生じる。この相対回転により、ローディングカム機構がカム作用を及ぼして、第1ウォームホイールと第2ウォームホイールを捻れ軸線の方向において互いに離隔させるように付勢力を及ぼす。
その結果、第1ウォームホイール及び第2ウォームホイールは、回転位相がずれると共に、一方がウォームの歯面に押し付けられ、他方がインターナルギヤの歯面に押し付けられる。これにより、遊星ウォームホイールとウォームの間及び遊星ウォームホイールとインターナルギヤの間のバックラッシが解消される。
Here, in a state where the first rotator and the second rotator are rotating in the same direction, the rotation member is appropriately rotated in one direction or the other direction, so that the rotation phase of the second rotator is relative to the first rotator. Can be advanced or delayed.
In other words, one of the rotating bodies can function as a transmission that changes the speed of the other rotating body. In particular, one of the rotating bodies can function as a speed reducer that reduces the speed of the other rotating body. it can.
In particular, since the planetary worm wheel includes the first worm hole, the second worm wheel, and the loading cam mechanism, when the rotating member is rotated, the worm rotates integrally with the rotating member, and the worm and the worm wheel mesh. First, one of the first worm wheel and the second worm wheel meshes with the worm and rotates. At this time, relative rotation occurs between the first worm wheel and the second worm wheel. Due to this relative rotation, the loading cam mechanism exerts a cam action to exert an urging force so as to separate the first worm wheel and the second worm wheel from each other in the direction of the torsion axis.
As a result, the rotation phases of the first worm wheel and the second worm wheel are shifted, and one is pressed against the tooth surface of the worm and the other is pressed against the tooth surface of the internal gear. This eliminates backlash between the planet worm wheel and the worm and between the planet worm wheel and the internal gear.
上記構成の位相変更ユニットにおいて、複数の遊星ウォームホイールが、上記軸線周りに等間隔に配列されている、構成を採用してもよい。
この構成によれば、複数の遊星ウォームホイールが、軸線周りにおいて均等にウォーム及びインターナルギヤに噛合するため、軸線回りにおける回転トルクが均等に伝達され、回転力を円滑に伝達させることができる。
In the phase change unit having the above configuration, a configuration may be adopted in which a plurality of planetary worm wheels are arranged at equal intervals around the axis.
According to this configuration, the plurality of planetary worm wheels uniformly mesh with the worm and the internal gear around the axis, so that the rotational torque around the axis is evenly transmitted, and the rotational force can be smoothly transmitted.
上記構成をなす位相変更ユニットにおいて、ローディングカム機構は、第1ウォームホイールの第2ウォームホイールに対向する対向面に形成された第1カム溝と、第2ウォームホイールの第1ウォームホイールに対向する対向面に形成された第2カム溝と、第1カム溝及び第2カム溝の間に介在する転動体を含む、構成を採用してもよい。 In the phase changing unit having the above configuration, the loading cam mechanism faces the first worm groove formed on the facing surface of the first worm wheel facing the second worm wheel, and faces the first worm wheel of the second worm wheel. A configuration including a second cam groove formed on the facing surface and a rolling element interposed between the first cam groove and the second cam groove may be adopted.
この構成によれば、第1ウォームホイールの第1カム溝と第2ウォームホイールの第2カム溝の間に転動体が転動自在に挟持された状態において、第1ウォームホイールと第2ウォームホイールの間に相対的な回転ずれが生じると、転動体が第1カム溝及び第2カム溝に沿って転がり、第1ウォームホイールと第2ウォームホイールを捻れ軸線の方向において互いに離隔させる。 According to this configuration, the first worm wheel and the second worm wheel are in a state where the rolling element is rotatably held between the first cam groove of the first worm wheel and the second cam groove of the second worm wheel. When a relative rotational deviation occurs between the first and second worm wheels, the rolling elements roll along the first and second cam grooves to separate the first and second worm wheels from each other in the direction of the twist axis.
上記構成をなす位相変更ユニットにおいて、ローディングカム機構は、第1ウォームホイールの第2ウォームホイールに対向する対向面に形成された凸状カム部と、第2ウォームホイールの第1ウォームホイールに対向する対向面に形成されて凸状カム部と相補形状をなす凹状カム部を含む、構成を採用してもよい。 In the phase changing unit having the above-described configuration, the loading cam mechanism faces the convex cam portion formed on the facing surface of the first worm wheel facing the second worm wheel, and faces the first worm wheel of the second worm wheel. A configuration including a concave cam portion formed on the opposing surface and complementary to the convex cam portion may be employed.
この構成によれば、第1ウォームホイールの凸状カム部と第2ウォームホイールの凹状カム部が互いに相補するように接触した状態において、第1ウォームホイールと第2ウォームホイールの間に相対的な回転ずれが生じると、凸状カム部と凹状カム部が互いにカム作用を及ぼして、第1ウォームホイールと第2ウォームホイールを捻れ軸線の方向において互いに離隔させる。
ここでは、第1ウォームホイール及び第2ウォームホイールだけで、転動体のような別部品が不要であるため、構造の簡素化、部品点数の削減を行うことができる。
According to this configuration, when the convex cam portion of the first worm wheel and the concave cam portion of the second worm wheel are in complementary contact with each other, the relative position between the first worm wheel and the second worm wheel is reduced. When the rotational displacement occurs, the convex cam portion and the concave cam portion exert a cam action on each other, and separate the first worm wheel and the second worm wheel from each other in the direction of the twist axis.
Here, only the first worm wheel and the second worm wheel do not require a separate component such as a rolling element, so that the structure can be simplified and the number of components can be reduced.
上記構成をなす位相変更ユニットにおいて、遊星キャリアは、第2回転体に固定されるフランジ部と、遊星ウォームホイールを回動自在に支持する円筒部を含み、遊星ウォームホイールは、捻れ軸線を画定する支軸により回動自在に支持され、円筒部は、遊星ウォームホイールを回動自在に受け入れる貫通孔及び支軸を捻れ位置に位置付ける嵌合凹部を含む、構成を採用してもよい。 In the phase change unit having the above configuration, the planet carrier includes a flange portion fixed to the second rotating body and a cylindrical portion rotatably supporting the planet worm wheel, wherein the planet worm wheel defines a torsion axis. A configuration in which the cylindrical portion is rotatably supported by the support shaft and includes a through hole that rotatably receives the planetary worm wheel and a fitting concave portion that positions the support shaft in the twisted position may be employed.
この構成によれば、遊星キャリアは、フランジ部を例えばボルト等を用いて第2回転体に固定することができる。また、遊星ウォームホイールに支軸等を組み込んだ状態で、遊星ウォームホイールを貫通孔に通すと共に支軸等を嵌合凹部に嵌め込むことにより、遊星ウォームホイールを遊星キャリアに容易に組み付けることができる。 According to this configuration, the planet carrier can fix the flange portion to the second rotating body using, for example, a bolt. In addition, the planetary worm wheel can be easily assembled to the planet carrier by passing the planetary worm wheel through the through-hole and fitting the spindle and the like into the fitting recess in a state where the support shaft and the like are incorporated in the planetary worm wheel. .
上記構成をなす位相変更ユニットにおいて、第1回転体は、インターナルギヤと、遊星キャリアと、回転部材と、遊星ウォームホイールとを収容するハウジングを含み、ハウジングは、インターナルギヤを備えた第1ハウジングと、第1ハウジングに連結されると共に回転部材の端部を露出させる第2ハウジングを含む、構成を採用してもよい。 In the phase changing unit having the above configuration, the first rotating body includes a housing that houses the internal gear, the planet carrier, the rotating member, and the planet worm wheel, and the housing includes a first gear having the internal gear. A configuration including a housing and a second housing connected to the first housing and exposing an end of the rotating member may be adopted.
この構成によれば、インターナルギヤが別個に形成されている場合はインターナルギヤを第1ハウジングの内周面に取り付けた後に、又、インターナルギヤが一体的に形成されている場合はそのまま、第1ハウジング内に遊星ウォームホイールを予め組み込んだ遊星キャリア及び回転部材を組み付け、第2ハウジングを第1ハウジングに連結することで、位相変更ユニットの組み立てを容易に行うことができる。 According to this configuration, after the internal gear is attached to the inner peripheral surface of the first housing when the internal gear is formed separately, or when the internal gear is integrally formed, the internal gear is kept as it is. The phase change unit can be easily assembled by assembling the planetary carrier and the rotating member in which the planetary worm wheel is pre-installed in the first housing and connecting the second housing to the first housing.
上記構成をなす位相変更ユニットにおいて、遊星キャリアは、ハウジングに回動自在に支持され、回転部材は、遊星キャリアに回動自在に支持されている、構成を採用してもよい。
この構成によれば、位相変更ユニットが組み立てられた状態において、遊星キャリアはハウジングに対して回動自在に支持され、回転部材は遊星キャリアに対して回動自在に支持されている。
したがって、回転部材及びウォームを回転させると、遊星ウォームホイールが自転しつつ公転することで、遊星キャリアがハウジングに対して相対的に回転する。
In the phase changing unit having the above configuration, a configuration may be adopted in which the planet carrier is rotatably supported by the housing, and the rotating member is rotatably supported by the planet carrier.
According to this configuration, in a state where the phase changing unit is assembled, the planet carrier is rotatably supported by the housing, and the rotating member is rotatably supported by the planet carrier.
Therefore, when the rotating member and the worm are rotated, the planetary worm wheel revolves while rotating, so that the planetary carrier relatively rotates with respect to the housing.
そして、遊星キャリアを第2回転体(例えば、カムシャフト)に固定すると、遊星キャリアに対してハウジング及び回転部材が回動自在に支持された状態が得られる。
このように、第2回転体に堅固に固定される遊星キャリアに対してハウジング及び回転部材が支持されるため、構造の歪みやずれを生じることなく、所期の機能を保証することができる。
Then, when the planet carrier is fixed to the second rotating body (for example, camshaft), a state where the housing and the rotating member are rotatably supported with respect to the planet carrier is obtained.
As described above, since the housing and the rotating member are supported by the planet carrier firmly fixed to the second rotating body, the expected function can be guaranteed without causing structural distortion or displacement.
上記構成をなす位相変更ユニットにおいて、回転部材は、第2ハウジングの開口部を通して駆動源を着脱自在に連結する連結部を有する、構成を採用してもよい。
この構成によれば、第2ハウジングの開口部を通して、駆動源を、回転部材の連結部に脱着自在に連結することができる。
In the phase changing unit having the above configuration, a configuration may be adopted in which the rotating member has a connecting portion that removably connects the driving source through the opening of the second housing.
According to this configuration, the drive source can be detachably connected to the connecting portion of the rotating member through the opening of the second housing.
本発明のバルブタイミング変更装置は、第1回転体をなすハウジングロータと第2回転体をなすカムシャフトの相対的な回転位相を変更する位相変更ユニットを備え、カムシャフトにより駆動される吸気バルブ又は排気バルブの開閉時期を変更するバルブタイミング変更装置であって、位相変更ユニットとして、上記構成をなすいずれかの位相変更ユニットを採用するものである。 The valve timing changing device of the present invention includes a phase changing unit that changes a relative rotation phase between a housing rotor that forms a first rotating body and a camshaft that forms a second rotating body, and an intake valve or a suction valve that is driven by the camshaft. A valve timing changing device for changing the opening / closing timing of an exhaust valve, wherein any one of the phase changing units having the above configuration is employed as a phase changing unit.
この構成によれば、位相を変更しない場合は、位相変更ユニットがロックされた状態であり、ハウジングロータがクランクシャフトに連動して一方向に回転すると、ハウジングロータと一体的にカムシャフトが回転する。そして、カムシャフトの回転により、吸気バルブ又は排気バルブが所定のバルブタイミングで開閉駆動される。
一方、位相を変更する場合は、例えば電動モータ等の駆動源により、位相変更ユニットの回転部材を軸線回りの一方向又は他方向に適宜回転させる。
これにより、ハウジングロータの回転に対するカムシャフトの回転が進角側又は遅角側に変更され、吸気バルブ又は排気バルブの開閉時期が変更される。
According to this configuration, when the phase is not changed, the phase change unit is locked, and when the housing rotor rotates in one direction in conjunction with the crankshaft, the camshaft rotates integrally with the housing rotor. . The rotation of the camshaft drives the intake valve or the exhaust valve to open and close at a predetermined valve timing.
On the other hand, when changing the phase, the rotating member of the phase changing unit is appropriately rotated in one direction or another direction around the axis by a drive source such as an electric motor.
As a result, the rotation of the camshaft relative to the rotation of the housing rotor is changed to the advance side or the retard side, and the opening / closing timing of the intake valve or the exhaust valve is changed.
上記構成をなす位相変更ユニットによれば、構造の簡素化、部品点数の削減、装置の小型化等を達成しつつ、位相を容易に変更することができる。
例えば、減速機として用いる場合に減速比を大きくすることができる。それ故に、小さい出力の電動モータ等の外力を用いて二つの回転体の回転位相を容易に変更できる。
また、歯車機構におけるバックラッシを解消でき、歯車の衝突音や振動を解消できる。
According to the phase changing unit having the above configuration, the phase can be easily changed while achieving simplification of the structure, reduction of the number of parts, downsizing of the device, and the like.
For example, when used as a reduction gear, the reduction ratio can be increased. Therefore, the rotation phases of the two rotators can be easily changed by using an external force of a small output electric motor or the like.
Further, backlash in the gear mechanism can be eliminated, and collision noise and vibration of the gear can be eliminated.
以下、本発明の実施形態について、添付図面を参照しつつ説明する。
この実施形態に係るバルブタイミング変更装置は、図1に示すように、カムシャフトCSとスプロケット11aの相対的な回転位相を変更する位相変更ユニットU等を備えている。ここで、カムシャフトCSは、軸線S回りの一方向(図1中のW方向)に回転する第2回転体を形成する。スプロケット11aは、軸線S回りの一方向(図1中のW方向)に回転する第1回転体の一部を形成し、チェーンを介してクランクシャフトの回転に連動する。
Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings.
As shown in FIG. 1, the valve timing changing device according to this embodiment includes a phase changing unit U for changing a relative rotation phase between the camshaft CS and the
そして、位相変更ユニットUが、駆動源としての電動モータDMにより適宜駆動制御されることにより、カムシャフトCSにより駆動される吸気バルブ又は排気バルブの開閉時期(バルブタイミング)が変更されるようになっている。 The opening / closing timing (valve timing) of the intake valve or the exhaust valve driven by the camshaft CS is changed by appropriately controlling the driving of the phase changing unit U by the electric motor DM as the driving source. ing.
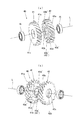
位相変更ユニットUは、図1ないし図4に示すように、第1回転体としてのハウジングロータ10、カムシャフトCSに固定される遊星キャリア20、軸線S回りに回転させられる回転部材30、遊星キャリア20に回動自在に支持される複数(ここでは、3つ)の遊星ウォームホイール40等を備えている。
As shown in FIGS. 1 to 4, the phase changing unit U includes a
ハウジングロータ10は、図2ないし図4に示すように、軸線S回りに回動自在に支持される第1ハウジング11、第1ハウジング部11に対してボルトb1により連結される第2ハウジング12等を備えている。
As shown in FIGS. 2 to 4, the
第1ハウジング11は、図4に示すように、スプロケット11a、円筒部11b、貫通孔11c、環状内周部11d、環状凹部11e、インターナルギヤ11f、ボルトb1を捩じ込む複数のネジ穴11g等を備えている。
貫通孔11cは、カムシャフトCSを非接触にて通すように形成されている。
環状内周部11dは、遊星キャリア20を回動自在に支持する軸受RB1を嵌め込むように形成されている。
環状凹部11eは、遊星キャリア20を軸線S方向において支持する軸受SB1を嵌め込むように形成されている。
インターナルギヤ11fは、円筒部11bの内周壁に形成されると共に、捻れ軸線L回りに回転する遊星ウォームホイール40と噛合するべく、軸線Sを回転中心とするはすば歯車として形成されている。
As shown in FIG. 4, the
The through
The annular inner
The
The
第2ハウジング12は、図4に示すように、円筒部12a、環状凹部12b、開口部12c、ボルトb1を通す複数の貫通孔12d等を備えている。
円筒部12aは、第1ハウジング11と接合されるように形成されている。
環状凹部12bは、遊星キャリア20を軸線S方向において支持する軸受SB2及び回転部材30を軸線S方向において支持する軸受SB3を嵌め込むように形成されている。
開口部12cは、回転部材30の端部に形成された連結部36を露出させると共に、外部から電動モータの駆動軸を連結部36に連結し得るように形成されている。
As shown in FIG. 4, the
The
The
The
第1ハウジング11及び第2ハウジング12により、インターナルギヤ11f、遊星キャリア20、回転部材30、遊星ウォームホイール40を収容するハウジングが形成される。
そして、第1ハウジング11及び第2ハウジング12の組付けについては、軸受RB1,SB1が組み込まれた第1ハウジング11に対して、遊星ウォームホイール40を組み込んで回転部材30を螺合させた状態の遊星キャリア20が組み込まれる。
続いて、軸受SB2,SB3を組み込みつつ、第2ハウジング12が第1ハウジングに連結されて、ボルトb1により締結される。これにより、位相変更ユニットUの組み立てが完了する。尚、組付け手順としては、他の手順でもよい。
The
The
Subsequently, the
遊星キャリア20は、図4ないし図6に示すように、カムシャフトCSに固定されるフランジ部21、フランジ部21に連続して形成され遊星ウォームホイール40を回動自在に支持する円筒部22等を備えている。
As shown in FIGS. 4 to 6, the
フランジ部21は、図4に示すように、嵌合凹部21a、貫通孔21b、環状端面21c、円筒外周面21d、環状凹部21e等を備えている。
嵌合凹部21aは、カムシャフトCSの端部を嵌合させるように形成されている。
貫通孔21bは、遊星キャリア20をカムシャフトCSに締結して固定するボルトBを通すように形成されている。
環状端面21cは、第1ハウジング11の環状凹部11eと協働して軸受SB1を挟み込むように形成されている。
円筒外周面21dは、第1ハウジング11の環状内周部11dと協働して軸受RB1を挟み込むように形成されている。
環状凹部21eは、軸受SB4を当接させるように形成されている。
As shown in FIG. 4, the
The
The through
The
The cylindrical outer
The annular
円筒部22は、図4ないし図6に示すように、3つの貫通孔22a、各々の貫通孔22aに対応して形成された嵌合凹部22b、円筒内周面22c、環状端面22d等を備えている。
貫通孔22aは、遊星ウォームホイール40を捻れ軸線L回りに回動自在に受け入れるように形成されている。
嵌合凹部22bは、遊星ウォームホイール40を回動自在に支持する支軸44の両端に固定された嵌合ブロック45を嵌合して固定するように形成されている。
ここで、3つの貫通孔22a及び貫通孔22aに対応して形成された嵌合凹部22bは、軸線S周りにおいて、120度の等間隔に配列するように形成されている。
円筒内周面22cは、軸受RB2を嵌め込むように形成されている。
環状端面22dは、第2ハウジング12の環状凹部12bと協働して軸受SB2を挟み込むように形成されている。
尚、軸受RB1,RB2はラジアル軸受であり、軸受SB1,SB2,SB3,SB4はスラスト軸受である。
As shown in FIGS. 4 to 6, the
The through
The
Here, the three through
The cylindrical inner
The
The bearings RB1 and RB2 are radial bearings, and the bearings SB1, SB2, SB3 and SB4 are thrust bearings.
これによれば、遊星キャリア20は、フランジ部21の嵌合凹部21aをカムシャフトCSの端部に嵌合させ、ボルトBを貫通孔21bに通して捩じ込むことで、カムシャフトCSに固定される。
また、遊星ウォームホイール40を貫通孔22aに通すと共に、支軸44の両端に固定された嵌合ブロック45を嵌合凹部22bに嵌め込むことにより、遊星ウォームホイール40を遊星キャリア20に容易に組み付けることができる。
According to this, the
The
回転部材30は、図4ないし図6に示すように、軸線Sを回転中心とするウォーム31、軸線S上を貫通する貫通孔32、環状端面33、円筒外周面34、環状端面35、連結部36等を備えている。
As shown in FIGS. 4 to 6, the rotating
ウォーム31は、図4ないし図6に示すように、軸線S回りに回転させられるものであり、1条又は多条の円筒状のネジ歯車である。
貫通孔32は、図4に示すように、軸線Sを中心とし、ボルトBを通して遊星キャリア20をカムシャフトCSに締結し得る内径寸法に形成されている。
環状端面33は、図4に示すように、遊星キャリア20の環状凹部21eと協働して軸受SB4を挟み込むように形成されている。
円筒外周面34は、図4に示すように、遊星キャリア20の円筒内周面22cと協働して軸受RB2を挟み込むように形成されている。
環状端面35は、第2ハウジング12の環状凹部12bと協働して軸受SB3を挟み込むように形成されている。
連結部36は、図4ないし図6に示すように、スリ割り状に形成され、電動モータDMの駆動軸を着脱自在に連結し得るように形成されている。
The
As shown in FIG. 4, the through
As shown in FIG. 4, the
As shown in FIG. 4, the cylindrical outer
The
As shown in FIGS. 4 to 6, the connecting
遊星ウォームホイール40は、図5ないし図8に示すように、相対的に移動可能に二分割された第1ウォームホイール41及び第2ウォームホイール42、第1ウォームホイール41及び第2ウォームホイール42の間に配置されて両者の相対回転により捻れ軸線Lの方向にカム作用を及ぼすローディングカム機構43等を備えている。
As shown in FIGS. 5 to 8, the
遊星ウォームホイール40は、2つの軸受rb及び2つの軸受sbを介して、支軸44により回動自在に支持されている。
支軸44は、捻れ軸線Lを画定すると共に、両端に嵌め込まれた嵌合ブロック45により遊星キャリア20に固定される。
嵌合ブロック45は、遊星キャリア20の円筒部22に形成された嵌合凹部22bに嵌め込まれて固定されるように形成されている。
捻れ軸線Lと軸線Sとがなす角度(捻れ角)θは、遊星ウォームホイール40のねじれ角、ウォーム31の進み角及び条数等を考慮しつつ、約30°〜60°の範囲、好ましくは43°〜47°(すなわち、45°±2°)の範囲に設定される。
The
The
The
The angle (torsion angle) θ between the torsion axis L and the axis S is in the range of about 30 ° to 60 °, preferably considering the torsion angle of the
2つの軸受rbは、ラジアル軸受であり、図7に示すように、環状凹部41c,42cに嵌め込まれて、第1ウォームホイール41及び第2ウォームホイール42を捻れ軸線L回りに回動自在に支持する。
2つの軸受sbは、スラスト軸受であり、図5及び図6に示すように、支軸44に通されると共に軸受rbと嵌合ブロック45の間に配置されている。
そして、2つの軸受sbは、ローディングカム機構43がカム作用を及ぼす際に、第1ウォームホイール41及び第2ウォームホイール42を捻れ軸線Lの方向において支持し、所定範囲を超えて移動するのを規制するようになっている。
The two bearings rb are radial bearings, and are fitted in annular
The two bearings sb are thrust bearings, and as shown in FIGS. 5 and 6, are passed through the
The two bearings sb support the
第1ウォームホイール41は、ウォーム31と噛合するはすば歯車をなす歯列部41a、支軸44を通す貫通孔41b、軸受rbを嵌め込む環状凹部41c、対向面41d等を備えている。
第2ウォームホイール42は、ウォーム31と噛合するはすば歯車をなす歯列部42a、支軸44を通す貫通孔42b、軸受rbを嵌め込む環状凹部42c、対向面42d等を備えている。
そして、第1ウォームホイール41及び第2ウォームホイール42は、捻れ軸線L回りにそれぞれ回転自在に、かつ、所定範囲内において捻れ軸線Lの方向に相対的に移動可能に、支軸44に支持されている。
The
The
The
ローディングカム機構43は、図7(b)、図8(a),(b)に示すように、第1ウォームホイール41の対向面41dに形成された3つの第1カム溝43a、第2ウォームホイール42の対向面42dに形成された3つの第2カム溝43b、第1カム溝43a及び第2カム溝43bの間にそれぞれ介在する3つの転動体43cにより構成されている。
As shown in FIGS. 7B, 8A, and 8B, the
第1カム溝43aは、図8(b)に示すように、捻れ軸線Lを中心とする円弧状でかつその中央位置が最も深く形成されている。
第2カム溝43bは、図8(a)に示すように、捻れ軸線Lを中心とする円弧状でかつその中央位置が最も深く形成されている。
第1カム溝43a及び第2カム溝43bは、図7(a)に示すように、第1ウォームホイール41及び第2ウォームホイール42の相対的な回転位相のずれがない状態、すなわち、歯列部41a,42aが一つの歯列として並ぶ状態で、互いに中央位置が一致し、最も深い部分に転動体43cを位置付けるように形成されている。
転動体43cは、図7(b)、図8(a),(b)に示すように、球体をなし、第1カム溝43aと第2カム溝43bに転動自在に挟み込まれている。
As shown in FIG. 8B, the
As shown in FIG. 8A, the
As shown in FIG. 7A, the
As shown in FIGS. 7 (b), 8 (a) and 8 (b), the rolling
遊星ウォームホイール40に含まれるローディングカム機構43の作用について説明する。
回転部材30が軸線S回りに回転させられると、回転部材30と一体的にウォーム31が回転する。ここで、ウォーム31とウォームホイール41,42の噛合いの関係上、先ず、第1ウォームホイール41と第2ウォームホイール42の一方が、ウォーム31と噛合って回転する。
The operation of the
When the rotating
このとき、第1ウォームホイール41と第2ウォームホイール42の間に相対的な回転を生じる。この相対回転により、第1カム溝43aと第2カム溝43bが相対的に回転移動し、転動体43cが第1カム溝43a及び第2カム溝43bの深い部分から浅い部分に転動することで、捻れ軸線Lの方向において互いに遠ざけるようなカム作用を及ぼす。
これにより、第1ウォームホイール41と第2ウォームホイール42は、捻れ軸線Lの方向において互いに離れる方向に移動させられつつ付勢される。
At this time, relative rotation occurs between the
Thereby, the
その結果、第1ウォームホイール41及び第2ウォームホイール42は、回転位相がずれると共に、一方がウォーム31の歯面に押し付けられ、他方がインターナルギヤ11fの歯面に押し付けられる。
これにより、遊星ウォームホイール40とウォーム31の間のバックラッシが解消され、又、遊星ウォームホイール40とインターナルギヤ11fの間のバックラッシが解消される。
As a result, the rotation phases of the
Thus, backlash between the
上記構成をなすウォームギヤ(ウォーム31、ウォームホイール40)及びインターナルギヤ11fにより構成される歯車機構において、ウォーム31の歯数(条数)をZa、インターナルギヤ11fの歯数をZcとした場合、減速比rは、r=Za/(1+Zc)で表される。
したがって、ウォーム31の歯数(条数)を小さく設定する(例えば、Za=1とする)ことで、通常の平歯車を用いた遊星歯車機構に比べて、大きな減速比を得ることができる。
すなわち、装置の小型化、部品点数の削減、コストの低減等を達成しつつ、高減速比を得ることができる。
それ故に、カムシャフトCS側から入力されるトルク変動の影響が電動モータ等の駆動源側に伝播し難くなり、駆動源側からの制御性が向上する。
Worm gear (
Therefore, by setting the number of teeth (number of teeth) of the
That is, a high reduction ratio can be obtained while achieving downsizing of the device, reduction in the number of parts, reduction in cost, and the like.
Therefore, the influence of the torque fluctuation input from the camshaft CS becomes difficult to propagate to the drive source such as the electric motor, and the controllability from the drive source is improved.
次に、上記の位相変更ユニットUの動作を説明する。
先ず、位相の変更を行わない場合、すなわち、バルブタイミングを変更しない場合は、回転部材30に回転駆動力が及ぼされない。
したがって、遊星ウォームホイール40とインターナルギヤ11fは、互いに噛合った位置でロックされる。
また、ウォーム31と遊星ウォームホイール40とは、互いに噛合った位置でロックされる。
これにより、カムシャフトCSとハウジングロータ10は、軸線S回りにおいて一方向(図1中のW方向、すなわちCW方向)に一体的に回転する。
Next, the operation of the phase changing unit U will be described.
First, when the phase is not changed, that is, when the valve timing is not changed, no rotational driving force is exerted on the rotating
Therefore, the
Further, the
Thereby, the camshaft CS and the
一方、位相を変更する場合、すなわち、バルブタイミングを変更する場合は、電動モータDMにより、回転部材30に回転駆動力が及ぼされる。
例えば、回転部材30が軸線S回りの一方向(図1中のCW方向)に相対的に回転させられると、ウォーム31も一方向(図1中のCW方向)に回転し、遊星ウォームホイール40が自転しつつ一方向(図1中のCW方向)に公転する。
On the other hand, when the phase is changed, that is, when the valve timing is changed, a rotational driving force is exerted on the rotating
For example, when the rotating
ここで、遊星ウォームホイール40は、遊星キャリア20に保持されているため、遊星キャリア20が一方向(図1中のCW方向)に回転し、遊星キャリア20が固定されたカムシャフトCSが、一方向(図1中のCW方向)に相対的に回転する。
すなわち、回転部材30が一方向(CW方向)に連続して複数回に亘って回転させられることにより、ハウジングロータ10に対してカムシャフトCSの回転位相が進められて、吸気バルブ又は排気バルブの開閉時期が進角側に変更される。
Here, since the
That is, when the rotating
一方、回転部材30が軸線S回りの他方向(図1中のCCW方向)に相対的に回転させられると、ウォーム31も他方向(図1中のCCW方向)に回転し、遊星ウォームホイール40が自転しつつ他方向(図1中のCCW方向)に公転する。
On the other hand, when the rotating
ここで、遊星ウォームホイール40は、遊星キャリア20に保持されているため、遊星キャリア20が他方向(図1中のCCW方向)に回転し、遊星キャリア20が固定されたカムシャフトCSが、他方向(図1中のCCW方向)に相対的に回転する。
すなわち、回転部材30が他方向(CCW方向)に連続して複数回に亘って回転させられることにより、ハウジングロータ10に対してカムシャフトCSの回転位相が遅らせられて、吸気バルブ又は排気バルブの開閉時期が遅角側に変更される。
Here, since the
That is, by rotating the rotating
以上述べたように、上記構成をなす位相変更ユニットUによれば、ウォーム31(ネジ歯車)及び遊星ウォームホイール40(はすば歯車)から成るウォームギヤの構造を採用するため、構造の簡素化、部品点数の削減、装置の小型化等を達成しつつ、位相を容易に変更することができる。
特に、ウォームギヤを採用することで減速比を大きくできるため、小さい出力の電動モータDM等を用いて回転部材30を容易に回転させることができる。それ故に、ハウジングロータ10とカムシャフトCSの相対的な回転位相を容易に変更できる。
As described above, according to the phase changing unit U having the above-described configuration, the structure of the worm gear including the worm 31 (screw gear) and the planetary worm wheel 40 (helical gear) is employed. The phase can be easily changed while achieving a reduction in the number of parts and a reduction in the size of the device.
In particular, since the reduction ratio can be increased by using the worm gear, the rotating
また、遊星ウォームホイール40が軸線Sに対して所定の角度θをなす傾斜した捻れ軸線L回りに回動自在であるため、遊星キャリア20がウォーム31に対してセルフロックするのを防止できる。それ故に、軸線S回りにおける遊星ウォームホイール40の公転を保証することができる。
Further, since the
特に、遊星ウォームホイール40が、二分割された第1ウォームホイール41及び第2ウォームホイール42と、両者の間に配置されたローディングカム機構43を含むため、遊星ウォームホイール40とウォーム31の間及び遊星ウォームホイール40とインターナルギヤ11fの間のバックラッシを解消することができる。それ故に、歯同士の衝突音や振動等を防止できる。
In particular, since the
また、3つの遊星ウォームホイール40が、軸線S周りにおいて等間隔に配列されて均等にウォーム31及びインターナルギヤ11fに噛合するため、軸線S回りにおける回転トルクが均等に伝達され、回転力を円滑に伝達させることができる。
Further, since the three
さらに、位相変更ユニットUが組み立てられた状態において、遊星キャリア20はハウジングロータ10に回動自在に支持され、回転部材30は遊星キャリア20に対して回動自在に支持されている。
そして、遊星キャリア20をカムシャフトCSに固定すると、遊星キャリア20に対してハウジングロータ10及び回転部材30が回動自在に支持された状態が得られる。
このように、第2回転体としてのカムシャフトCSに堅固に固定される遊星キャリア20に対してハウジングロータ10及び回転部材30が支持されるため、構造の歪みやずれを生じることなく、所期の機能を保証することができる。
Further, in a state where the phase changing unit U is assembled, the
When the
As described above, the
図9及び図10は、遊星ウォームホイール40に含まれるローディングカム機構の他の実施形態を示すものであり、前述の実施形態と同一の構成については同一の符号を付して説明を省略する。
FIGS. 9 and 10 show another embodiment of the loading cam mechanism included in the
この実施形態に係る遊星ウォームホイール40は、図9及び図10に示すように、第1ウォームホイール41及び第2ウォームホイール42、第1ウォームホイール41及び第2ウォームホイール42の間に配置されて両者の相対回転により捻れ軸線Lの方向にカム作用を及ぼすローディングカム機構43´等を備えている。
As shown in FIGS. 9 and 10, the
ここで、ローディングカム機構43´は、第1ウォームホイール41の対向面41dに形成された凸状カム部43a´と、第2ウォームホイール42の対向面42dに形成されて凸状カム部43a´と相補形状をなす凹状カム部43b´により構成されている。
Here, the
凸状カム部43a´は、図10(b)に示すように、捻れ軸線Lを中心とする円弧状でかつその中央位置が最も突出した傾斜面を有するように形成されている。
凹状カム部43b´は、図10(a)に示すように、捻れ軸線Lを中心とする円弧状でかつその中央位置が最も深く窪んだ傾斜面を有するように形成されている。
As shown in FIG. 10 (b), the
As shown in FIG. 10A, the
凸状カム部43a´及び凹状カム部43b´は、図9(a)に示すように、第1ウォームホイール41及び第2ウォームホイール42の相対的な回転位相のずれがない状態、すなわち、歯列部41a,42aが一つの歯列として並ぶ状態で、互いに中央位置が一致し、互いに相補するように接触した状態となるように形成されている。
As shown in FIG. 9A, the
そして、第1ウォームホイール41の凸状カム部43a´と第2ウォームホイール42の凹状カム部43b´が互いに相補するように接触した状態において、第1ウォームホイール4と第2ウォームホイール42の間に相対的な回転ずれが生じると、凸状カム部43a´と凹状カム部43b´が相対的に回転移動し、第1ウォームホイール41と第2ウォームホイール42を捻れ軸線Lの方向において互いに遠ざけるようなカム作用を及ぼす。
In a state where the
その結果、第1ウォームホイール41及び第2ウォームホイール42は、回転位相がずれると共に、一方がウォーム31の歯面に押し付けられ、他方がインターナルギヤ11fの歯面に押し付けられる。
これにより、遊星ウォームホイール40とウォーム31の間バックラッシが解消され、又、遊星ウォームホイール40とインターナルギヤ11fの間のバックラッシが解消される。
ここでは、第1ウォームホイール41及び第2ウォームホイール42だけで、前述実施形態のような転動体43cが不要であるため、構造の簡素化、部品点数の削減を行うことができる。
As a result, the rotation phases of the
Thus, backlash between the
Here, only the
上記実施形態において、インターナルギヤ11fは、第1ハウジング11の円筒部11bの内周壁に一体的に形成された場合を示したが、これに限定されるものではなく、別個に形成されたインターナルギヤを第1ハウジングの内周壁に固定する構造を採用してもよい。
In the above-described embodiment, the case where the
上記実施形態においては、遊星ウォームホイールとして、3つの遊星ウォームホイール40を採用した場合を示したが、これに限定されるものではなく、1つ又は2つの遊星ウォームホイールを採用してもよく、又、4つ以上の遊星ウォームホイールを採用してもよい。
In the above embodiment, the case where three
上記実施形態においては、遊星ウォームホイール40が二分割された第1ウォームホイール41及び第2ウォームホイール42と、ローディングカム機構43,43´を含む構成を示したが、これに限定されるものではなく、バックラッシ等が特に問題無ければ、単一のウォームホイールから成る遊星ウォームホイールを採用してもよい。
In the above-described embodiment, the configuration has been described in which the
上記実施形態においては、位相変更ユニットとして、バルブタイミング変更装置に適用される減速機としての位相変更ユニットUを示したが、これに限定されるものではなく、二つの回転体の相対的な回転位相を変更する必要のある機構及び装置等において、減速機、増速機、あるいは変速機等としても適用することができる。 In the above embodiment, the phase change unit U as the speed reducer applied to the valve timing change device is shown as the phase change unit. However, the present invention is not limited to this. In a mechanism and a device that need to change the phase, the present invention can be applied also as a speed reducer, a speed increasing device, a transmission, or the like.
CS カムシャフト(第2回転体)
S 軸線
L 捻れ軸線
DM 電動モータ(駆動源)
U 位相変更ユニット
RB1,RB2 軸受(ラジアル軸受)
SB1,SB2,SB3,SB4 軸受(スラスト軸受)
b1,B ボルト
10 ハウジングロータ(第1回転体)
11 第1ハウジング(ハウジング)
11a スプロケット
11b 円筒部
11c 貫通孔
11d 環状内周部
11e 環状凹部
11f インターナルギヤ
11g ネジ穴
12 第2ハウジング(ハウジング)
12a 円筒部
12b 環状凹部
12c 開口部
12d 貫通孔
20 遊星キャリア
21 フランジ部
21a 嵌合凹部
21b 貫通孔
21c 環状端面
21d 円筒外周面
21e 環状凹部
22 円筒部
22a 貫通孔
22b 嵌合凹部
22c 円筒内周面
22d 環状端面
30 回転部材
31 ウォーム
32 貫通孔
33 環状端面
34 円筒外周面
35 環状端面
36 連結部(端部)
40 遊星ウォームホイール
41 第1ウォームホイール
41a 歯列部
41b 貫通孔
41c 環状凹部
41d 対向面
42 第2ウォームホイール
42a 歯列部
42b 貫通孔
42c 環状凹部
42d 対向面
43,43´ ローディングカム機構
43a 第1カム溝
43a´ 凸状カム部
43b 第2カム溝
43b´ 凹状カム部
43c 転動体
44 支軸
45 嵌合ブロック
rb 軸受(ラジアル軸受)
sb 軸受(スラスト軸受)
CS camshaft (second rotating body)
S axis L torsion axis DM Electric motor (drive source)
U Phase change unit RB1, RB2 Bearing (radial bearing)
SB1, SB2, SB3, SB4 Bearing (Thrust bearing)
b1,
11 1st housing (housing)
12a
40
sb bearing (thrust bearing)
Claims (9)
前記第1回転体と一体的に回転するインターナルギヤと、
前記第2回転体に固定されて一体的に回転する遊星キャリアと、
前記軸線回りに回転させられるウォームを有する回転部材と、
前記遊星キャリアにより前記軸線に対して傾斜した捻れ位置にある捻れ軸線回りに回動自在に支持されて,前記ウォーム及びインターナルギヤに噛合する少なくとも一つの遊星ウォームホイールと、を含み、
前記遊星ウォームホイールは、相対的に移動可能に二分割された第1ウォームホール及び第2ウォームホイールと、前記第1ウォームホイール及び第2ウォームホイールの間に配置されて両者の相対回転により前記捻れ軸線の方向にカム作用を及ぼすローディングカム機構を含む、
ことを特徴とする位相変更ユニット。 A phase changing unit that changes a relative rotation phase between a first rotating body and a second rotating body that rotate on a common axis,
An internal gear that rotates integrally with the first rotating body;
A planetary carrier fixed to the second rotating body and integrally rotating,
A rotating member having a worm that is rotated about the axis,
Wherein is rotatably supported around an axis twist in inclined twisted position with respect to the axis by a planet carrier, viewed contains at least one planet worm wheel, the meshing with the worm and the internal gear,
The planetary worm wheel is disposed between a first worm hole and a second worm wheel, which are divided into two parts so as to be relatively movable, and the torsion is generated by the relative rotation of the first worm wheel and the second worm wheel. Including a loading cam mechanism that exerts a cam action in the direction of the axis,
A phase changing unit, characterized in that:
ことを特徴とする請求項1に記載の位相変更ユニット。 A plurality of the planetary worm wheels are arranged at equal intervals around the axis,
The phase change unit according to claim 1, wherein:
ことを特徴とする請求項1又は2に記載の位相変更ユニット。 The loading cam mechanism has a first cam groove formed on a surface of the first worm wheel facing the second worm wheel, and a loading cam mechanism formed on a surface of the second worm wheel facing the first worm wheel. A second cam groove, and a rolling element interposed between the first cam groove and the second cam groove.
The phase changing unit according to claim 1, wherein:
ことを特徴とする請求項1又は2に記載の位相変更ユニット。 The loading cam mechanism has a convex cam portion formed on a facing surface of the first worm wheel facing the second worm wheel, and a loading cam portion formed on a facing surface of the second worm wheel facing the first worm wheel. Including a concave cam portion that is formed complementary to the convex cam portion,
The phase changing unit according to claim 1, wherein:
前記遊星ウォームホイールは、前記捻れ軸線を画定する支軸により回動自在に支持され、
前記円筒部は、前記遊星ウォームホイールを回動自在に受け入れる貫通孔及び前記支軸を前記捻れ位置に位置付ける嵌合凹部を含む、
ことを特徴とする請求項1ないし4いずれか一つに記載の位相変更ユニット。 The planet carrier includes a flange portion fixed to the second rotating body, and a cylindrical portion rotatably supporting the planet worm wheel,
The planetary worm wheel is rotatably supported by a spindle that defines the torsion axis,
The cylindrical portion includes a through hole that rotatably receives the planetary worm wheel and a fitting concave portion that positions the support shaft at the twist position.
Phase changing unit according to any one claims 1 to 4, characterized in that.
前記ハウジングは、前記インターナルギヤを備えた第1ハウジングと、前記第1ハウジングに連結されると共に前記回転部材の端部を露出させる第2ハウジングを含む、
ことを特徴とする請求項1ないし5いずれか一つに記載の位相変更ユニット。 The first rotating body includes a housing that houses the internal gear, the planet carrier, the rotating member, and the planet worm wheel,
The housing includes a first housing provided with the internal gear, and a second housing connected to the first housing and exposing an end of the rotating member.
The phase changing unit according to any one of claims 1 to 5, wherein
前記回転部材は、前記遊星キャリアに回動自在に支持されている、
ことを特徴とする請求項6に記載の位相変更ユニット。 The planet carrier is rotatably supported by the housing,
The rotating member is rotatably supported by the planet carrier,
The phase change unit according to claim 6 , wherein:
ことを特徴とする請求項6又は7に記載の位相変更ユニット。 The rotating member has a connecting portion that detachably connects a driving source through an opening of the second housing,
The phase changing unit according to claim 6 or 7 , wherein:
前記位相変更ユニットは、請求項1ないし8いずれか一つに記載の位相変更ユニットである、
ことを特徴とするバルブタイミング変更装置。 A phase change unit that changes a relative rotation phase between a housing rotor that forms the first rotating body and a camshaft that forms the second rotating body, and changes an opening / closing timing of an intake valve or an exhaust valve driven by the camshaft; A valve timing changing device,
The phase change unit is the phase change unit according to any one of claims 1 to 8 ,
A valve timing changing device characterized by the above-mentioned.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016021608A JP6676397B2 (en) | 2016-02-08 | 2016-02-08 | Phase change unit and valve timing change device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016021608A JP6676397B2 (en) | 2016-02-08 | 2016-02-08 | Phase change unit and valve timing change device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017141676A JP2017141676A (en) | 2017-08-17 |
| JP6676397B2 true JP6676397B2 (en) | 2020-04-08 |
Family
ID=59628327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016021608A Active JP6676397B2 (en) | 2016-02-08 | 2016-02-08 | Phase change unit and valve timing change device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6676397B2 (en) |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5028581B1 (en) * | 1966-02-12 | 1975-09-17 | ||
| JPH0486310A (en) * | 1990-07-31 | 1992-03-18 | Atsugi Unisia Corp | Internal combustion engine valve timing control device |
| JPH0777266A (en) * | 1993-06-25 | 1995-03-20 | Zexel Corp | Planetary type differential gear unit |
| JPH0754934A (en) * | 1993-08-17 | 1995-02-28 | Hirotaka Wakamatsu | Reduction gear mechanism |
| AT408897B (en) * | 2000-03-09 | 2002-03-25 | Tcg Unitech Ag | DEVICE FOR ADJUSTING A CAMSHAFT |
| US6622677B2 (en) * | 2002-02-22 | 2003-09-23 | Borgwarner Inc. | Worm gear driven variable cam phaser |
| JP3937164B2 (en) * | 2002-04-19 | 2007-06-27 | 株式会社デンソー | Valve timing adjustment device |
| PL3044478T3 (en) * | 2013-09-11 | 2018-07-31 | Gaposa S.R.L. | Tubular actuating mechanism for roll-type closures |
-
2016
- 2016-02-08 JP JP2016021608A patent/JP6676397B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017141676A (en) | 2017-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103201535B (en) | Planetary reducer | |
| JP4735504B2 (en) | Valve timing adjustment device | |
| WO2010047189A1 (en) | Gear transmitting device | |
| JP6443382B2 (en) | Valve timing adjustment device | |
| CN113330230B (en) | Wave gear unit, gear transmission device, and valve timing changing device | |
| US20190211903A1 (en) | Cycloidal differential | |
| TWI814784B (en) | Reducer | |
| JP2014005900A (en) | Eccentric rocking gear device | |
| WO2020218505A1 (en) | Speed reducer and driving device | |
| JP6676397B2 (en) | Phase change unit and valve timing change device | |
| JP7810832B2 (en) | Eccentric oscillating gear device | |
| JP2008290593A (en) | Steering angle variable steering device | |
| JP4710786B2 (en) | Valve timing adjustment device | |
| JP7211753B2 (en) | Gear unit and its assembly method | |
| CN111577420A (en) | Valve timing changing device | |
| JP4373597B2 (en) | Swing intermeshing planetary gear mechanism and angle transmission error reduction method | |
| US11965437B2 (en) | Electric actuator | |
| JP6706496B2 (en) | Phase change unit and valve timing change device | |
| JP2020026803A (en) | Gear unit and assembling method thereof | |
| US8881701B2 (en) | Camshaft adjusting device | |
| JP5206807B2 (en) | Valve timing adjustment device | |
| JP2015102065A (en) | Valve timing control device | |
| CN113944730A (en) | Steering engine | |
| JPH0546458B2 (en) | ||
| KR102465194B1 (en) | Cycloidal reducer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200221 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6676397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |