JP6590514B2 - 磁気共鳴イメージング装置及び方法 - Google Patents
磁気共鳴イメージング装置及び方法 Download PDFInfo
- Publication number
- JP6590514B2 JP6590514B2 JP2015095125A JP2015095125A JP6590514B2 JP 6590514 B2 JP6590514 B2 JP 6590514B2 JP 2015095125 A JP2015095125 A JP 2015095125A JP 2015095125 A JP2015095125 A JP 2015095125A JP 6590514 B2 JP6590514 B2 JP 6590514B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- gradient magnetic
- shape
- pulse
- noise
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002595 magnetic resonance imaging Methods 0.000 title claims description 69
- 238000000034 method Methods 0.000 title claims description 68
- 238000003384 imaging method Methods 0.000 claims description 144
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 claims description 63
- 238000004364 calculation method Methods 0.000 claims description 17
- 230000009467 reduction Effects 0.000 claims description 17
- 238000005481 NMR spectroscopy Methods 0.000 claims description 10
- 238000001228 spectrum Methods 0.000 claims description 8
- 230000006872 improvement Effects 0.000 claims description 6
- 238000007689 inspection Methods 0.000 claims description 4
- 230000004044 response Effects 0.000 claims description 3
- 230000008859 change Effects 0.000 description 22
- 238000012986 modification Methods 0.000 description 13
- 230000004048 modification Effects 0.000 description 13
- 230000000694 effects Effects 0.000 description 11
- 230000003068 static effect Effects 0.000 description 11
- 238000012545 processing Methods 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 6
- 238000005070 sampling Methods 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 238000001914 filtration Methods 0.000 description 5
- 238000005316 response function Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000005457 optimization Methods 0.000 description 3
- 230000001629 suppression Effects 0.000 description 3
- 230000005534 acoustic noise Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012805 post-processing Methods 0.000 description 2
- 238000007616 round robin method Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012887 quadratic function Methods 0.000 description 1
- 238000002945 steepest descent method Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images



























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/385—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using gradient magnetic field coils
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Heart & Thoracic Surgery (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Radiology & Medical Imaging (AREA)
- High Energy & Nuclear Physics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Description
本実施形態のMRI装置は、高周波磁場パルス及び傾斜磁場パルスの印加強度及びタイミングを記述したパルスシーケンスに従って高周波磁場パルス及び傾斜磁場パルスを印加する磁場印加部と、前記磁場印加部が印加した磁場により検査対象から発生する核磁気共鳴信号を受信する受信部と、を備える。本実施形態のMRI装置は、磁場印加部の制御に用いられるパルスシーケンスに含まれる少なくとも1種の傾斜磁場パルスが、磁場印加部における傾斜磁場のスルーレートを満たし且つ対称形という条件のもとで求められた、騒音を最小化する形状を有している。騒音を最小化する傾斜磁場パルスの形状の一つの態様は、変曲点を3以上持つ曲線で描出される形状である。
本発明の実施形態を説明するための全図において、同一機能を有するものは同一符号を付し、その繰り返しの説明は省略する。
一般に撮像に用いられる傾斜磁場パルスには、スライス選択傾斜磁場パルス、位相エンコード傾斜磁場パルス及びそのリフェーズ或いはディフェーズパルス、周波数エンコード傾斜磁場パルス及びそのリフェーズ或いはディフェーズパルス、スポイラーパルスなどがあり、上述した特定の傾斜磁場パルスは、これら各種傾斜磁場パルスのいずれに用いることも可能であるが、以下の説明では、パルスシーケンスに必須のパルスであって且つ騒音に対し影響の大きい周波数エンコード傾斜磁場パルスに適用する場合を説明する。
まず形状について、目標となる波形の面積を設定するとともに、MRI装置による実現可能性等を考慮した形状の条件を決めておく。波形の面積は、エンコード時間及び傾斜磁場強度(言い換えると受信バンド幅BW)で決まるものであるが、ここでは形状を決めるために暫定的な値を設定しておいてもよい。さらにエコートレイン数、インターエコータイムIETなどの撮像パラメータに係る条件を設定しておいてもよい。これら撮像パラメータは傾斜磁場の周波数スペクトルに影響を与えるものであり、それが変化すると発生する騒音レベルも変化するので、これら撮像パラメータも騒音を最小化するためのパラメータとしても良いが、本実施形態では、説明を簡単にするために固定して考える。
BWeff=(γ/2π)×G×FOV (1)
上式中、γは磁気回転比、Gは傾斜磁場強度、FOVは撮像視野である。なおノイズはバンド幅の平方根(√(BW))に比例するが、傾斜磁場強度が印加中に一定ではなく変動するノンユニフォームサンプリングの場合にはサンプリング密度も考慮する必要がある。上記BWeffは、サンプリング密度の影響をBWに含めたものと言うことができる。

また、本実施形態ではパルスシーケンスや傾斜磁場波形が記憶領域に保存されるとしたが、撮像条件が入力されるたびにパルスシーケンス作成部180で作成しても良い。
第一実施形態では、周波数エンコードパルス形状が正負の符号が同じ区間では極値をひとつだけもつこと条件としたが、本変更例は、この条件を除いたことが特徴である。その他の条件は、第一実施形態と同じで、対称性、最大スルーレート、面積、リフェーズパルス時間、エンコードパルス時間である。
本変更例では、第一実施形態における周波数エンコードパルス形状の条件に対し、さらに最大傾斜磁場強度の条件を追加したことが特徴である。その他の条件は、第一実施形態と同じで、正負の符号が同じ区間では極値をひとつだけもつこと、対称性、最大スルーレート、面積、リフェーズパルス時間、エンコードパルス時間である。
本変更例では、最大傾斜磁場強度の条件を追加したことにより、そのまま装置で出力できる波形が得られ、さらに最大傾斜磁場強度の条件を考慮してパルス形状を調整する必要がない。また、最大傾斜磁場強度も考慮した騒音を最小にするパルス形状が得られる。
本変更例は、リフェーズパルスや逆極性のパルスを伴わない傾斜磁場パルスとして、騒音を最小化する特定形状の傾斜磁場パルスを用いるものである。本実施形態においても、採用する撮像シーケンスは特に限定されないが、例えば図3に示すFSEシーケンスの場合、リフェーズパルス302やスライス選択傾斜磁場パルス305に適用することができる。
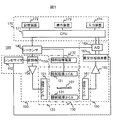
本実施形態では、複数の波形モデルの組み合わせから、騒音を最小化する傾斜磁場パルス形状を求めることが特徴である。求めた傾斜磁場パルス形状を、撮像に際し選択されたパルスシーケンスに用いることは第一実施形態と同様である。また装置構成も図1及び図2に示す第一実施形態の構成と同様であるので、説明を省略し、異なる点を説明する。
第一実施形態の変更例1で求めた傾斜磁場パルス形状(図12)から、リフェーズパルスに隣接して、リフェーズパルスと同じような形状で逆向きのパルスを印加したときに高い騒音低減効果が得られることがわかる。リフェーズパルスと同じような形状で逆向きのパルスの効果は、リフェーズパルスを最終的な形状に固定し、周波数エンコードを探索することで確認できる。図15及び図16は、それぞれ、正負の符号が同じ区間では極値をひとつだけもつ条件がない場合(第一実施形態の変更例1)及び正負の符号が同じ区間では極値をひとつだけもつ条件がある場合(第一実施形態)について、リフェーズパルスを固定して周波数エンコード傾斜磁場パルスの形状を探索したときの途中経過を示している。それ以外の条件は、両者とも同じである。図16には、形状の途中経過とともに、その周波数スペクトル及びそれにFRFとA特性を乗じたものの変化を併せて示す。
第一実施形態では撮像パラメータを固定して騒音を最小化する傾斜磁場パルス形状を求めたが、本実施形態は、撮像パラメータ自体を、騒音を最小化する傾斜磁場パルス形状を求める際の条件として追加することが特徴である。条件として追加する撮像パラメータは、特に限定されないが、例えば、繰り返し時間(TR)、エコー間隔(IET)、リフェーズパルス時間などが挙げられ、これら1つ又は複数を、それぞれ所定の幅を持たせて条件として追加する。所定の幅とは、一般的なパルスシーケンスで許容される撮像パラメータの値の範囲である。
本変更例においても、騒音を最小化する傾斜磁場パルス形状を求めるに際し、撮像パラメータの幅を条件として追加すること、この幅内で最適な傾斜磁場パルス形状を求めることは第三実施形態と同じである。但し本変更例では、第三実施形態のステップS102’のように撮像パラメータの条件を形状の条件と対等に扱って、傾斜磁場パルス形状を探索するのではなく、段階的に適用する。
本実施形態は、騒音を最小化する撮像と、画質を優先する撮像とを操作者が選択するための情報を生成すること、またその情報を操作者に提示するGUIを備えることが特徴である。即ち、本実施形態のMRI装置は、例えば、騒音を最小化する受信バンド幅や騒音を最小化する受信バンド幅と発生する騒音との関係を表示装置(173)に表示させる表示制御部(183)をさらに備える。また本実施形態のMRI装置は、騒音低減及び画質向上の優先度を選択させるUIを表示装置(173)に表示させる表示制御部(183)と、UIを介して選択された優先度に基き、撮像パラメータを制御する撮像制御部(制御部170)とをさらに備える。
図24に示すグラフは、所定のBWaveで騒音を最小化する傾斜磁場波パルス形状を求めたのち、そのパルス形状についてBWaveを変化させたときの騒音レベルをプロットしたものであり、BWave以外の撮像パラメータは固定している。
このようなGUIを設けることにより、操作者は騒音レベルを考慮しながら、最適な撮像方法を選択し実行することができる。
Claims (13)
- 磁気共鳴イメージング装置において騒音を最小にする傾斜磁場パルス形状を求める方法であって、
傾斜磁場のスルーレートを満たすという条件及びパルス形状の対称性を満たすという条件のもと、装置固有の周波数応答特性と傾斜磁場波形の周波数スペクトルを用いて算出した時間平均の騒音レベルを最小化する形状の組み合わせを求め、前記傾斜磁場パルス形状とすることを特徴とする方法。 - 請求項1に記載の傾斜磁場パルス形状を求める方法であって、
前記傾斜磁場パルスの形状が、傾斜磁場強度が常に正または負となる区間で変曲点を3以上持つ曲線で描出される形状であることを特徴とする方法。 - 請求項1に記載の傾斜磁場パルス形状を求める方法であって、
前記傾斜磁場パルスの形状は、複数の微小長方形を所定の面積になるまで順次積み上げて形成された形状であり、微小長方形を積み上げて最終的な傾斜磁場パルス形状とするまでに形成される暫定的な形状が騒音を最小化する形状となるように前記暫定的な形状を更新することにより得られることを特徴とする方法。 - 請求項1に記載の傾斜磁場パルス形状を求める方法であって、
前記傾斜磁場パルスの波形は、形状パラメータで特定される複数の波形を組み合わせた形状であることを特徴とする方法。 - 請求項4に記載の傾斜磁場パルス形状を求める方法であって、
前記傾斜磁場パルスの波形は、形状パラメータで特定される複数の波形を組み合わせたモデルを初期値として、前記形状パラメータを変化させたときに得られる傾斜磁場パルス形状が騒音を最小化する形状となるように前記形状パラメータの更新を繰り返すことによって得られることを特徴とする方法。 - 高周波磁場パルス及び傾斜磁場パルスの印加強度及びタイミングを記述したパルスシーケンスに従って高周波磁場パルス及び傾斜磁場パルスを印加する磁場印加部と、前記磁場印加部が印加した磁場により検査対象から発生する核磁気共鳴信号を受信する受信部と、前記騒音を最小化する形状を持つ傾斜磁場パルスを格納する記憶装置と、前記記憶装置に格納された傾斜磁場パルス形状を用いて前記パルスシーケンスを作成するパルスシーケンス作成部とを備え、
前記記憶装置に格納された前記騒音を最小化する形状を持つ傾斜磁場パルス形状は、請求項1ないし5のいずれか一項記載の方法によって作成された傾斜磁場パルス形状であることを特徴とする磁気共鳴イメージング装置。 - 請求項6に記載の磁気共鳴イメージング装置であって、
前記騒音を最小化する形状を持つ傾斜磁場パルスは、周波数エンコード傾斜磁場パルスであることを特徴とする磁気共鳴イメージング装置。 - 請求項6に記載の磁気共鳴イメージング装置であって、
前記パルスシーケンス作成部は、入力装置を介して入力された撮像条件で決まる制限を追加して、前記騒音を最小化する形状を持つ傾斜磁場パルスを含むパルスシーケンスを作成することを特徴とする磁気共鳴イメージング装置。 - 請求項6に記載の磁気共鳴イメージング装置であって、前記騒音を最小化する受信バンド幅を表示装置に表示させる表示制御部をさらに備えることを特徴とする磁気共鳴イメージング装置。
- 請求項9に記載の磁気共鳴イメージング装置であって、前記騒音を最小化する受信バンド幅と発生する騒音との関係を表示装置に表示させる表示制御部をさらに備えることを特徴とする磁気共鳴イメージング装置。
- 請求項6に記載の磁気共鳴イメージング装置であって、騒音低減及び画質向上の優先度を選択させるUIを表示装置に表示させる表示制御部と、UIを介して選択された優先度に基き、撮像パラメータを制御する撮像制御部とをさらに備えることを特徴とする磁気共鳴イメージング装置。
- 請求項11に記載の磁気共鳴イメージング装置であって、予め或いは入力装置を介して設定された撮像パラメータにおける騒音レベルを算出する騒音算出部をさらに備え、前記表示制御部は、前記騒音算出部が算出した結果を表示部に表示させることを特徴とする磁気共鳴イメージング装置。
- 請求項12に記載の磁気共鳴イメージング装置であって、前記表示制御部は第1の撮像パラメータについて算出した騒音レベルを、入力装置を介して変更された第2の撮像パラメータについて算出した騒音レベルとともに、表示装置に表示させることを特徴とする磁気共鳴イメージング装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015095125A JP6590514B2 (ja) | 2015-05-07 | 2015-05-07 | 磁気共鳴イメージング装置及び方法 |
| PCT/JP2016/063421 WO2016178413A1 (ja) | 2015-05-07 | 2016-04-28 | 磁気共鳴イメージング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015095125A JP6590514B2 (ja) | 2015-05-07 | 2015-05-07 | 磁気共鳴イメージング装置及び方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016209252A JP2016209252A (ja) | 2016-12-15 |
| JP2016209252A5 JP2016209252A5 (ja) | 2018-01-25 |
| JP6590514B2 true JP6590514B2 (ja) | 2019-10-16 |
Family
ID=57217661
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015095125A Active JP6590514B2 (ja) | 2015-05-07 | 2015-05-07 | 磁気共鳴イメージング装置及び方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6590514B2 (ja) |
| WO (1) | WO2016178413A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6944816B2 (ja) * | 2017-06-07 | 2021-10-06 | 株式会社日立製作所 | 磁気共鳴イメージング装置 |
| JP6867926B2 (ja) * | 2017-10-12 | 2021-05-12 | 株式会社日立製作所 | ノイズ発生源探索装置及びノイズ発生源探索方法 |
| US11340323B2 (en) * | 2020-01-06 | 2022-05-24 | General Electric Company | Low acoustic noise magnetic resonance image acquisition |
| CN112826494B (zh) * | 2020-12-30 | 2023-05-23 | 上海联影医疗科技股份有限公司 | Mr设备振动和声学噪声消减方法、系统、装置及存储介质 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5127310B2 (ja) * | 2007-06-11 | 2013-01-23 | 株式会社日立メディコ | 磁気共鳴イメージング装置 |
| JP6291328B2 (ja) * | 2014-04-09 | 2018-03-14 | 株式会社日立製作所 | 磁気共鳴イメージング装置および磁気共鳴イメージング装置に搭載されるパルスシーケンスの算出方法 |
| JP6333078B2 (ja) * | 2014-06-09 | 2018-05-30 | 株式会社日立製作所 | 磁気共鳴イメージング装置および傾斜磁場波形調整方法 |
-
2015
- 2015-05-07 JP JP2015095125A patent/JP6590514B2/ja active Active
-
2016
- 2016-04-28 WO PCT/JP2016/063421 patent/WO2016178413A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016209252A (ja) | 2016-12-15 |
| WO2016178413A1 (ja) | 2016-11-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6333293B2 (ja) | 金属耐性mr画像化 | |
| JP6071905B2 (ja) | 磁気共鳴イメージング装置及び領域撮像方法 | |
| JP5740307B2 (ja) | 磁気共鳴イメージング装置及び傾斜磁場印加方法 | |
| JP6590514B2 (ja) | 磁気共鳴イメージング装置及び方法 | |
| JP6560023B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2009095652A (ja) | 磁気共鳴イメージング装置およびこの磁気共鳴イメージング装置における脂肪抑制効果の分析方法 | |
| US10429463B2 (en) | Quiet MRI with spin echo (SE) or fast spin echo (FSE) | |
| JP6431464B2 (ja) | 磁気共鳴イメージング装置の傾斜磁場波形調整方法、および、磁気共鳴イメージング装置 | |
| US10175317B2 (en) | Quiet MRI using alternating gradient sequence | |
| JP6013161B2 (ja) | 磁気共鳴イメージング装置および磁気共鳴イメージング方法 | |
| US20170227621A1 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| JP6270609B2 (ja) | 磁気共鳴制御シーケンスの決定 | |
| JP6615184B2 (ja) | 磁気共鳴イメージング装置 | |
| CN110068781B (zh) | 磁共振成像装置、磁共振成像系统及参数推定方法 | |
| JP5211403B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2008054738A (ja) | 磁気共鳴イメージング装置 | |
| JP6681708B2 (ja) | 磁気共鳴イメージング装置 | |
| JPWO2014199794A1 (ja) | 磁気共鳴イメージング装置、磁気共鳴イメージング方法およびverseパルス圧縮率決定方法 | |
| CN108931749B (zh) | 借助mr设备进行血管显示的方法 | |
| JP4745650B2 (ja) | 磁気共鳴イメージング装置 | |
| JP4297541B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2016097291A (ja) | 磁気共鳴イメージング装置 | |
| JP6118127B2 (ja) | 磁気共鳴イメージング装置 | |
| JP5942265B2 (ja) | 磁気共鳴イメージング装置及びrfパルス制御方法 | |
| JP7032195B2 (ja) | 磁気共鳴イメージング装置およびその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20160426 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190306 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190820 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190917 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6590514 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |