JP6487425B2 - 胸内圧の非侵襲的推定及び/又は胸内圧の非侵襲的推定に基づく呼吸仕事量の計算 - Google Patents
胸内圧の非侵襲的推定及び/又は胸内圧の非侵襲的推定に基づく呼吸仕事量の計算 Download PDFInfo
- Publication number
- JP6487425B2 JP6487425B2 JP2016522911A JP2016522911A JP6487425B2 JP 6487425 B2 JP6487425 B2 JP 6487425B2 JP 2016522911 A JP2016522911 A JP 2016522911A JP 2016522911 A JP2016522911 A JP 2016522911A JP 6487425 B2 JP6487425 B2 JP 6487425B2
- Authority
- JP
- Japan
- Prior art keywords
- lung
- pressure
- airway pressure
- subject
- airflow
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
- A61B5/085—Measuring impedance of respiratory organs or lung elasticity
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/03—Detecting, measuring or recording fluid pressure within the body other than blood pressure, e.g. cerebral pressure; Measuring pressure in body tissues or organs
- A61B5/036—Detecting, measuring or recording fluid pressure within the body other than blood pressure, e.g. cerebral pressure; Measuring pressure in body tissues or organs by means introduced into body tracts
- A61B5/037—Measuring oesophageal pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/03—Detecting, measuring or recording fluid pressure within the body other than blood pressure, e.g. cerebral pressure; Measuring pressure in body tissues or organs
- A61B5/036—Detecting, measuring or recording fluid pressure within the body other than blood pressure, e.g. cerebral pressure; Measuring pressure in body tissues or organs by means introduced into body tracts
- A61B5/038—Measuring oral pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
- A61B5/087—Measuring breath flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Detecting, measuring or recording devices for evaluating the respiratory organs
- A61B5/091—Measuring volume of inspired or expired gases, e.g. to determine lung capacity
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4836—Diagnosis combined with treatment in closed-loop systems or methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7271—Specific aspects of physiological measurement analysis
- A61B5/7278—Artificial waveform generation or derivation, e.g. synthesising signals from measured signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M16/00—Devices for influencing the respiratory system of patients by gas treatment, e.g. mouth-to-mouth respiration; Tracheal tubes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M16/00—Devices for influencing the respiratory system of patients by gas treatment, e.g. mouth-to-mouth respiration; Tracheal tubes
- A61M16/021—Devices for influencing the respiratory system of patients by gas treatment, e.g. mouth-to-mouth respiration; Tracheal tubes operated by electrical means
- A61M16/022—Control means therefor
- A61M16/024—Control means therefor including calculation means, e.g. using a processor
- A61M16/026—Control means therefor including calculation means, e.g. using a processor specially adapted for predicting, e.g. for determining an information representative of a flow limitation during a ventilation cycle by using a root square technique or a regression analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0247—Pressure sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M16/00—Devices for influencing the respiratory system of patients by gas treatment, e.g. mouth-to-mouth respiration; Tracheal tubes
- A61M16/0003—Accessories therefor, e.g. sensors, vibrators, negative pressure
- A61M2016/0027—Accessories therefor, e.g. sensors, vibrators, negative pressure pressure meter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M16/00—Devices for influencing the respiratory system of patients by gas treatment, e.g. mouth-to-mouth respiration; Tracheal tubes
- A61M16/0003—Accessories therefor, e.g. sensors, vibrators, negative pressure
- A61M2016/003—Accessories therefor, e.g. sensors, vibrators, negative pressure with a flowmeter
- A61M2016/0033—Accessories therefor, e.g. sensors, vibrators, negative pressure with a flowmeter electrical
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2210/00—Anatomical parts of the body
- A61M2210/10—Trunk
- A61M2210/1042—Alimentary tract
- A61M2210/105—Oesophagus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/40—Respiratory characteristics
- A61M2230/46—Resistance or compliance of the lungs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/65—Impedance, e.g. conductivity, capacity
Description
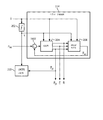
呼吸仕事量(WOB)決定部210は、入力として、推定された胸内圧及び決定された肺気量を受信して、WOB値を決定する。例えば、呼吸仕事量(WOB)決定部210は、WOBアルゴリズム212に基づきWOB値を決定する。これは、例えば、キャンベルダイヤグラムを生成し、各呼吸又は呼吸のサブセットを含む1つ又は複数の呼吸で、非侵襲的に決定された入力情報から、WOBを計算することを含む。

Claims (28)
- 被験者の非侵襲的に測定された気道圧を示す第1の生理的パラメータを得るステップと、
前記被験者の肺への非侵襲的に測定された気流を示す第2の生理的パラメータを得るステップと、
前記第1及び第2の生理的パラメータに基づき前記被験者の胸内圧を示す第3の生理的パラメータを推定して、これを示す信号を生成するステップとを有する、方法。 - 前記被験者の肺への気流を示す前記第2の生理的パラメータに基づき、前記被験者の肺気量を決定するステップと、
前記第1及び第2の生理的パラメータ並びに前記決定された肺気量に基づき、前記被験者の胸内圧を示す前記第3の生理的パラメータを推定するステップと更に有する、請求項1に記載の方法。 - 前記被験者の肺への気流を示す前記第2の生理的パラメータを積分することにより、前記肺気量を決定するステップを更に有する、請求項2に記載の方法。
- 肺力学モデルに基づき前記第3の生理的パラメータを推定するステップを更に有し、前記モデルが、前記非侵襲的に測定された気道圧、前記肺への前記非侵襲的に測定された気流、前記肺気量、肺抵抗、肺コンプライアンス及び所定の定数の関数である、請求項3に記載の方法。
- 前記非侵襲的に測定された気道圧、前記肺への気流、前記決定された肺気量及び前記所定の定数に対して前記肺力学モデルをフィットさせることにより、前記第3の生理的パラメータを推定するステップを更に有する、請求項4に記載の方法。
- 前記非侵襲的に測定された気道圧、前記肺への前記気流、前記決定された肺気量及び前記所定の定数に対して前記肺力学モデルをフィットさせることにより、前記肺抵抗及び前記肺コンプライアンスを推定するステップを更に有する、請求項5に記載の方法。
- 前記推定された胸内圧、前記肺への前記測定された気流、前記決定された肺気量、前記推定された肺抵抗、前記推定された肺コンプライアンス及び前記所定の定数を用いて、前記肺力学モデルに基づき気道圧を推定するステップと、
前記推定された気道圧及び前記測定された気道圧の間の差を決定するステップと、
前記推定された気道圧及び前記測定された気道圧の間の差を最小化することにより、前記第3の生理的パラメータを推定するステップとを有する、請求項6に記載の方法。 - 前記被験者の気道圧を非侵襲的に連続して測定するステップと、
前記被験者の肺への気流を非侵襲的に連続して測定するステップと、
前記非侵襲的に連続して測定された気道圧と非侵襲的に連続して測定された前記肺への気流とに基づき、前記第3の生理的パラメータを非侵襲的に連続して推定するステップとを更に有する、請求項7に記載の方法。 - 前記推定された胸内圧及び前記決定された肺気量に基づき、キャンベルダイヤグラムを生成するステップと、
胸壁コンプライアンスラインを生成するステップと、
前記キャンベルダイヤグラムの圧容積ループ及び前記胸壁コンプライアンスラインにおける領域を決定するステップと、
前記領域に基づき、呼吸仕事量を決定するステップとを有する、請求項8に記載の方法。 - 被験者の非侵襲的に推定された胸内圧を示す第1の生理的パラメータを得るステップと、
前記被験者の肺への非侵襲的に測定された気流を示す第3の生理的パラメータに基づき、前記被験者の肺気量を示す第2の生理的パラメータを決定するステップと、
前記第1及び第2の生理的パラメータに基づき、呼吸仕事量を決定し、これを示す信号を生成するステップとを有する、方法。 - 前記第1及び第2の生理的パラメータに基づき、キャンベルダイヤグラムを生成するステップと、
前記キャンベルダイヤグラムに基づき、前記呼吸仕事量を決定するステップとを更に有する、請求項10に記載の方法。 - 胸壁コンプライアンスラインを生成するステップと、
前記キャンベルダイヤグラムの圧容積ループ及び前記胸壁コンプライアンスラインにおける領域を決定するステップと、
前記領域に基づき、前記呼吸仕事量を決定するステップとを更に有する、請求項11に記載の方法。 - 各呼吸に関して前記呼吸仕事量を決定するステップを更に有する、請求項10乃至12のいずれかに記載の方法。
- 前記被験者の非侵襲的に測定された気道圧を得るステップと、
前記被験者の前記非侵襲的に測定された気道圧及び前記肺気量を示す前記第2の生理的パラメータに基づき、前記被験者の胸内圧を推定するステップとを更に有する、請求項10乃至13のいずれかに記載の方法。 - 前記肺への気流を積分することにより前記肺気量を決定するステップを更に有する、請求項14に記載の方法。
- 肺力学モデルに基づき前記胸内圧を推定するステップを更に有し、前記モデルが、前記非侵襲的に測定された気道圧、前記肺への気流、前記決定された肺気量、肺抵抗、肺コンプライアンス及び所定の定数の関数である、請求項14又は15に記載の方法。
- 前記非侵襲的に測定された気道圧、前記肺への前記気流、前記決定された肺気量及び前記所定の定数に対して前記肺力学モデルをフィットさせることにより、前記胸内圧を推定するステップを更に有する、請求項16に記載の方法。
- 前記非侵襲的に測定された気道圧、前記肺への前記気流、前記決定された肺気量及び前記所定の定数に対して前記肺力学モデルをフィットさせることにより、前記肺抵抗及び前記肺コンプライアンスを推定するステップを更に有する、請求項17に記載の方法。
- 前記推定された胸内圧、前記肺への前記測定された気流、前記決定された肺気量、前記推定された肺抵抗、前記推定された肺コンプライアンス及び前記所定の定数を用いて、前記肺力学モデルに基づき気道圧を推定するステップと、
前記推定された気道圧及び前記測定された気道圧の間の差を決定するステップと、
前記推定された気道圧及び前記測定された気道圧の間の差を最小化することにより、前記胸内圧を推定するステップとを更に有する、請求項18に記載の方法。 - 生理的パラメータ決定装置であって、
非侵襲的に測定された気道圧及び肺への非侵襲的に測定された気流に対して前記肺の力学モデルをフィットさせ、前記非侵襲的に測定された気道圧及び予測された気道圧の間の残差平方和を最小化することにより、被験者の前記非侵襲的に測定された気道圧及び前記被験者の肺への前記非侵襲的に測定された気流に基づき、前記被験者の胸内圧を推定するパラメータ推定器と、
前記推定された胸内圧及び前記肺への前記気流から決定される肺気量に基づき、キャンベルダイヤグラムを決定し、前記キャンベルダイヤグラムの圧容積ループ及び胸壁コンプライアンスラインにおける領域に基づき、前記被験者に関する呼吸仕事量を決定するメトリック決定部とを有する、生理的パラメータ決定装置。 - コンピュータに、
被験者の非侵襲的に測定された気道圧を示す第1の生理的パラメータを受信するステップと、
前記被験者の肺への非侵襲的に測定された気流を示す第2の生理的パラメータを受信するステップと、
前記第1及び第2の生理的パラメータに基づき前記被験者の胸内圧を示す第3の生理的パラメータを推定して、これを示す信号を生成するステップとを実行させるための、コンピュータプログラム。 - 前記被験者の肺への気流を示す前記第2の生理的パラメータに基づき、前記被験者の肺気量を決定するステップと、
前記第1及び第2の生理的パラメータ並びに前記決定された肺気量に基づき、前記被験者の胸内圧を示す前記第3の生理的パラメータを推定するステップと更に有する、請求項21に記載のコンピュータプログラム。 - 前記被験者の肺への気流を示す前記第2の生理的パラメータを積分することにより、前記肺気量を決定するステップを更に有する、請求項22に記載のコンピュータプログラム。
- 肺力学モデルに基づき前記第3の生理的パラメータを推定するステップを更に有し、前記モデルが、前記非侵襲的に測定された気道圧、前記肺への前記非侵襲的に測定された気流、前記肺気量、肺抵抗、肺コンプライアンス及び所定の定数の関数である、請求項23に記載のコンピュータプログラム。
- 前記非侵襲的に測定された気道圧、前記肺への気流、前記決定された肺気量及び前記所定の定数に対して前記肺力学モデルをフィットさせることにより、前記第3の生理的パラメータを推定するステップを更に有する、請求項24に記載のコンピュータプログラム。
- 前記非侵襲的に測定された気道圧、前記肺への前記気流、前記決定された肺気量及び前記所定の定数に対して前記肺力学モデルをフィットさせることにより、前記肺抵抗及び前記肺コンプライアンスを推定するステップを更に有する、請求項25に記載のコンピュータプログラム。
- 前記推定された胸内圧、前記肺への前記測定された気流、前記決定された肺気量、前記推定された肺抵抗、前記推定された肺コンプライアンス及び前記所定の定数を用いて、前記肺力学モデルに基づき気道圧を推定するステップと、
前記推定された気道圧及び前記測定された気道圧の間の差を決定するステップと、
前記推定された気道圧及び前記測定された気道圧の間の差を最小化することにより、前記第3の生理的パラメータを推定するステップとを有する、請求項26に記載のコンピュータプログラム。 - 前記推定された胸内圧及び前記決定された肺気量に基づき、キャンベルダイヤグラムを生成するステップと、
胸壁コンプライアンスラインを生成するステップと、
前記キャンベルダイヤグラムの圧容積ループ及び前記胸壁コンプライアンスラインにおける領域を決定するステップと、
前記領域に基づき、呼吸仕事量を決定するステップとを更に有する、請求項21に記載のコンピュータプログラム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361840658P | 2013-06-28 | 2013-06-28 | |
| US61/840,658 | 2013-06-28 | ||
| EP13179067 | 2013-08-02 | ||
| EP13179067.7 | 2013-08-02 | ||
| PCT/IB2014/062406 WO2014207623A2 (en) | 2013-06-28 | 2014-06-19 | Non-invasive estimation of intra-pleural pressure and/or computation of work of breathing based on a non-invasive estimation of intra-pleural pressure |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016526430A JP2016526430A (ja) | 2016-09-05 |
| JP2016526430A5 JP2016526430A5 (ja) | 2017-07-27 |
| JP6487425B2 true JP6487425B2 (ja) | 2019-03-20 |
Family
ID=48915905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016522911A Active JP6487425B2 (ja) | 2013-06-28 | 2014-06-19 | 胸内圧の非侵襲的推定及び/又は胸内圧の非侵襲的推定に基づく呼吸仕事量の計算 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10842411B2 (ja) |
| EP (1) | EP3013224A2 (ja) |
| JP (1) | JP6487425B2 (ja) |
| CN (1) | CN105530860B (ja) |
| BR (1) | BR112015032083A2 (ja) |
| MX (1) | MX2015016918A (ja) |
| RU (1) | RU2700981C2 (ja) |
| WO (1) | WO2014207623A2 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2700981C2 (ru) | 2013-06-28 | 2019-09-24 | Конинклейке Филипс Н.В. | Неинвазивная оценка внутриплеврального давления и/или вычисление работы дыхания на основании неинвазивной оценки внутриплеврального давления |
| WO2016063172A1 (en) * | 2014-10-24 | 2016-04-28 | Koninklijke Philips N.V. | Determining if airway clearance is required during respiratory therapy |
| US20180177963A1 (en) * | 2015-06-02 | 2018-06-28 | Koninklijke Philips N.V. | Non-invasive method for monitoring patient respiratory status via successive parameter estimation |
| US10912906B2 (en) | 2015-10-12 | 2021-02-09 | Koninklijke Philips N.V. | Mechanical ventilation with automatic control of patient's work of breathing using classical feedback control |
| US9682235B1 (en) | 2015-12-14 | 2017-06-20 | Stimdia Medical, Inc. | Electrical stimulation for preservation and restoration of diaphragm function |
| CN109069030B (zh) | 2016-02-18 | 2021-10-19 | 皇家飞利浦有限公司 | 经由使用中心静脉压测压法增强呼吸参数估计和异步检测算法 |
| IT201600103298A1 (it) * | 2016-10-14 | 2018-04-14 | Univ Degli Studi Di Trieste | Apparato e metodo per il controllo dei parametri di una macchina di assistenza alla respirazione |
| US11207517B2 (en) | 2017-07-06 | 2021-12-28 | Stimdia Medical, Inc. | Percutaneous electrical phrenic nerve stimulation system |
| EP3525857B1 (en) | 2017-11-14 | 2020-01-29 | Covidien LP | Systems for drive pressure spontaneous ventilation |
| WO2019234588A1 (de) * | 2018-06-04 | 2019-12-12 | Imt Analytics Ag | Prüfvorrichtung und verfahren zum prüfen einer messsonde sowie verwendung eines beatmungsgeräts zum prüfen der messsonde |
| CN112244808B (zh) * | 2020-11-10 | 2024-02-20 | 中国人民解放军陆军特色医学中心 | 一种用于测量胸腔压的胃管 |
| CN112790754B (zh) * | 2021-01-05 | 2021-11-09 | 中国医学科学院北京协和医院 | 一种胸腔内压测量装置 |
| CN112826489B (zh) * | 2021-01-05 | 2021-11-30 | 中国医学科学院北京协和医院 | 一种可视化的腔内压测量装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4597394A (en) * | 1981-05-26 | 1986-07-01 | Respitrace Corporation | Method for noninvasively monitoring mouth volume |
| ATE42672T1 (de) * | 1981-11-02 | 1989-05-15 | Respitrace Corp | Geraet zur beobachtung von klinisch aufschlussreichen oberflaechenbewegungen bei lebewesen. |
| US4860766A (en) * | 1983-11-18 | 1989-08-29 | Respitrace Corp. | Noninvasive method for measuring and monitoring intrapleural pressure in newborns |
| US4856532A (en) * | 1987-07-22 | 1989-08-15 | Johnson Arthur T | Large-signal airway resistance measurement |
| JP2582010B2 (ja) | 1991-07-05 | 1997-02-19 | 芳嗣 山田 | 呼吸筋活動のモニタ装置 |
| US5316010A (en) * | 1993-04-02 | 1994-05-31 | Brown Jesse P | Apparatus for noninvasive measuring of upper airway resistance in humans during sleep |
| RU2207159C2 (ru) | 2001-09-21 | 2003-06-27 | Новокузнецкий государственный институт усовершенствования врачей | Способ проведения искусственной вентиляции легких, регулируемой по объему |
| AU2003280434A1 (en) * | 2002-06-27 | 2004-01-19 | Yrt Limited | Method and device for monitoring and improving patient-ventilator interaction |
| EP1534131B1 (en) * | 2002-08-30 | 2016-10-26 | University of Florida Research Foundation, Inc. | Method and apparatus for predicting work of breathing |
| CN101380233B (zh) * | 2007-09-05 | 2010-12-22 | 深圳迈瑞生物医疗电子股份有限公司 | 基于呼吸力学模块的呼吸功实时监测方法及监测装置 |
| TWM335075U (en) | 2007-09-10 | 2008-06-21 | Hon Hai Prec Ind Co Ltd | Electrical connector |
| WO2010022513A1 (en) * | 2008-08-28 | 2010-03-04 | Maquet Critical Care Ab | Determining patient- ventilator breath contribution index in spontaneously breathing, mechanically ventilated patients |
| US20100071696A1 (en) * | 2008-09-25 | 2010-03-25 | Nellcor Puritan Bennett Llc | Model-predictive online identification of patient respiratory effort dynamics in medical ventilators |
| EP2189111A1 (en) * | 2008-11-21 | 2010-05-26 | Pulsion Medical Systems AG | Apparatus and method for determining a physiologic parameter |
| JP5181291B2 (ja) * | 2008-12-22 | 2013-04-10 | 日本光電工業株式会社 | 呼吸機能測定装置 |
| CN102770070B (zh) * | 2009-12-28 | 2015-11-25 | 佛罗里达大学研究基金会有限公司 | 用于实时评估肺力学的系统和方法 |
| US9408555B2 (en) * | 2010-06-30 | 2016-08-09 | Indiana University Research And Technology Corporation | Supersensitive linear pressure transducer |
| US8811635B2 (en) * | 2011-07-06 | 2014-08-19 | Robert Bosch Gmbh | Apparatus and method for driving parasitic capacitances using diffusion regions under a MEMS structure |
| RU2700981C2 (ru) | 2013-06-28 | 2019-09-24 | Конинклейке Филипс Н.В. | Неинвазивная оценка внутриплеврального давления и/или вычисление работы дыхания на основании неинвазивной оценки внутриплеврального давления |
-
2014
- 2014-06-19 RU RU2016102185A patent/RU2700981C2/ru not_active IP Right Cessation
- 2014-06-19 BR BR112015032083-0A patent/BR112015032083A2/pt not_active Application Discontinuation
- 2014-06-19 WO PCT/IB2014/062406 patent/WO2014207623A2/en active Application Filing
- 2014-06-19 US US14/901,115 patent/US10842411B2/en active Active
- 2014-06-19 JP JP2016522911A patent/JP6487425B2/ja active Active
- 2014-06-19 MX MX2015016918A patent/MX2015016918A/es unknown
- 2014-06-19 CN CN201480037198.9A patent/CN105530860B/zh active Active
- 2014-06-19 EP EP14737002.7A patent/EP3013224A2/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016526430A (ja) | 2016-09-05 |
| CN105530860A (zh) | 2016-04-27 |
| US20160135713A1 (en) | 2016-05-19 |
| MX2015016918A (es) | 2016-04-04 |
| US10842411B2 (en) | 2020-11-24 |
| EP3013224A2 (en) | 2016-05-04 |
| CN105530860B (zh) | 2019-07-09 |
| RU2016102185A3 (ja) | 2018-05-28 |
| RU2016102185A (ru) | 2017-08-01 |
| RU2700981C2 (ru) | 2019-09-24 |
| BR112015032083A2 (pt) | 2020-07-21 |
| WO2014207623A2 (en) | 2014-12-31 |
| WO2014207623A3 (en) | 2015-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6487425B2 (ja) | 胸内圧の非侵襲的推定及び/又は胸内圧の非侵襲的推定に基づく呼吸仕事量の計算 | |
| RU2737295C2 (ru) | Аппарат для механической искусственной вентиляции легких и мониторинга дыхания | |
| EP3256197B1 (en) | Simultaneous estimation of respiratory parameters by regional fitting of respiratory parameters | |
| CN109803708B (zh) | 呼吸设备和通气机设备 | |
| CN108814581B (zh) | 用于连续和无创地确定有效肺容量和心输出量的方法 | |
| EP2571423B1 (en) | System for estimating upper airway resistance and lung compliance employing induced central apneas | |
| JP2018536456A (ja) | 呼吸力学パラメータ推定のための異常検出装置及び方法 | |
| CN108513540B (zh) | 用于保护性换气的方法、系统和软件 | |
| CN108135536B (zh) | 经由参数优化的对呼吸动力学和患者努力的同时估计 | |
| JP2018532509A (ja) | 推定性能を改善するための患者肺パラメータの息ごとの再評価 | |
| JP6912388B2 (ja) | 逐次パラメータ推定を介する患者呼吸状態をモニタリングする非侵襲的方法 | |
| EP3451923B1 (en) | Capnotracking of cardiac output or effective pulmonary blood floow during mechanical ventilation | |
| CN109152898A (zh) | 用于控制通气辅助的装置和方法 | |
| WO2016132279A1 (en) | Enhancement of simultaneous estimation of respiratory parameters via superimposed pressure signal |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170609 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6487425 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |