JP6477348B2 - Self-position estimation apparatus and self-position estimation method - Google Patents
Self-position estimation apparatus and self-position estimation method Download PDFInfo
- Publication number
- JP6477348B2 JP6477348B2 JP2015157925A JP2015157925A JP6477348B2 JP 6477348 B2 JP6477348 B2 JP 6477348B2 JP 2015157925 A JP2015157925 A JP 2015157925A JP 2015157925 A JP2015157925 A JP 2015157925A JP 6477348 B2 JP6477348 B2 JP 6477348B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image
- unit
- light
- sign
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Navigation (AREA)
- Image Processing (AREA)
Description
本発明は、車両の地図上での位置を推定する自己位置推定装置及び自己位置推定方法に関する。 The present invention relates to a self-position estimation apparatus and a self-position estimation method for estimating the position of a vehicle on a map.
特許文献1(特開2009−163714号公報)には、自車両の周囲に存在する標識の位置を推定し、推定した標識位置とナビゲーション装置に用いられる地図上の標識位置を照合して、地図情報に含まれる標識位置を補正することが開示されている。 In Patent Document 1 (Japanese Patent Laid-Open No. 2009-163714), a position of a sign existing around the host vehicle is estimated, and the estimated sign position is compared with a sign position on a map used for a navigation device. It is disclosed to correct the marker position included in the information.
該特許文献1では、投光器より周期的に点灯、消灯が切り替わる光を投光し、更に、この光の反射光をカメラで撮像し、点灯時及び消灯時に撮像した画像の差分画像を生成する。この差分画像に基づき、反射強度が所定値以上であり、且つ、対象とする標識(例えば、四角形)に相当する面積を有する領域を設定して、標識の有無及び位置を算出することが示されている。
In
しかしながら、上述した特許文献1に開示された従来例では、投光する光と類似した周期で点灯、消灯する光源の存在や、車両に対する標識面の角度に応じてカメラで撮像した画像に含まれる反射光が変化してしまう。このため、カメラで撮像した画像に含まれる標識位置と地図情報に含まれる標識位置を照合できず、ひいては、車両の自己位置を高精度に推定できなくなるという問題があった。
However, in the conventional example disclosed in
本発明は、このような従来の課題を解決するためになされたものであり、その目的とするところは、車両の自己位置を高精度に推定することが可能な自己位置推定装置及び自己位置推定方法を提供することにある。 The present invention has been made to solve such a conventional problem, and an object of the present invention is to provide a self-position estimation device and a self-position estimation capable of estimating the self-position of a vehicle with high accuracy. It is to provide a method.
上記目的を達成するため、本発明の一態様は、車両周囲に光を投光する投光部と、投光部より光が投光された領域を含む車両周囲を撮像する撮像部と、撮像部で撮像された画像から反射光を抽出する反射光抽出部と、反射光抽出部にて抽出された反射光に基づいて、撮像部で撮像された画像から反射物の画像領域を設定し、画像領域の面積、中心座標、受信強度の分布、及び受信強度の積分値に基づいて、車両周囲に存在する標識位置を推定する標識位置推定部を有する。更に、地図情報を取得する地図情報取得部と、地図情報に含まれる標識位置と、標識位置推定部で推定された標識位置に基づいて、車両の地図上の位置を推定する自己位置推定部を備える。 In order to achieve the above object, according to one embodiment of the present invention, a light projecting unit that projects light around a vehicle, an image capturing unit that captures an area around the vehicle including a region where light is projected from the light projecting unit, and imaging Based on the reflected light extracted from the reflected light extracted from the image captured by the imaging unit and the reflected light extracted by the reflected light extracting unit , the image area of the reflector is set from the image captured by the imaging unit, Based on the area of the image area, the center coordinates, the distribution of the received intensity, and the integrated value of the received intensity, the apparatus has a sign position estimating unit that estimates a marker position existing around the vehicle. Further, a map information acquisition unit that acquires map information, a self-position estimation unit that estimates a position of the vehicle on the map based on the sign position included in the map information and the sign position estimated by the sign position estimation unit Prepare.
本発明によれば、撮像された画像から抽出された反射光の面積、強度の分布から車両周囲に存在する標識位置を推定し、更に、地図情報に含まれる標識位置に基づいて車両の地図上の位置を推定するので、車両の自己位置を高精度に推定することが可能となる。 According to the present invention, the sign position existing around the vehicle is estimated from the area and intensity distribution of the reflected light extracted from the captured image, and further on the map of the vehicle based on the sign position included in the map information. Therefore, it is possible to estimate the self-position of the vehicle with high accuracy.
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明の一実施形態に係る自己位置推定装置100の構成を示すブロック図である。本実施形態に係る自己位置推定装置100は、車両周囲に存在する標識位置を高精度に検出し、且つ、検出した標識位置と地図情報に含まれる標識位置を照合することにより、地図上での車両の自己位置を推定する。なお、以下に示す「標識」とは、交通標識等の路側に立設されているものやボッツドッツと併設されている反射板等の路面に設けられているものを含む概念である。
Hereinafter, embodiments of the present invention will be described with reference to the drawings. FIG. 1 is a block diagram showing a configuration of a self-
図1に示すように、本実施形態に係る自己位置推定装置100は、投光部11と、撮像部12と、反射光抽出部13と、標識位置推定部14を備えている。更に、車両の位置情報を取得するGPS17と、参照画像生成部16と、自己位置推定部15を備えている。
As shown in FIG. 1, the self-
投光部11は、車両の適所に搭載され、車両の周囲に向けて所定の周期で点灯、消灯を繰り返す点滅光を投光する。
The
撮像部12は、車両に搭載される例えばCCDカメラやCMOSカメラであり、投光部11より照射され、車両周囲に存在する標識等の反射物Pで反射する光を撮像する。
The
反射光抽出部13は、投光部11にて投光した点滅光の周期に同期させて、撮像部12で撮像された画像を取得する。そして、投光部11の点灯時の画像と、消灯時の画像の差分を演算することにより、投光部11により投光した光の反射光のみを抽出する。
The reflected
標識位置推定部14は、反射光抽出部13で検出された反射光に基づいて、撮像部12で撮像した画像内における標識の位置、領域、及び反射光強度を測定する。そして、後述する正規化処理を実施して、標識を含む画像(以下「計測画像」という)を生成する。即ち、標識位置推定部14は、反射光抽出部13で抽出された反射光の面積及び強度の分布から車両周囲に存在する標識位置を推定する機能を備えている。
Based on the reflected light detected by the reflected
参照画像生成部16は、GPS17より取得される車両の現在位置情報、及び車両周囲に存在する標識位置を含む地図情報に基づき、予想される複数の車両姿勢から撮像部12で撮像される車両周囲の複数の画像を参照画像として生成する。この際、複数の参照画像は、x,y,z座標、及びヨー、ロール、ピッチがそれぞれ異なるように生成される。その結果、撮像部12で撮像されると予想される複数の参照画像が生成される。即ち、参照画像生成部16は、車両周囲に存在する標識位置を含む地図情報を取得する地図情報取得部としての機能を備え、この地図情報に基づいて複数の参照画像を生成する。
The reference
自己位置推定部15は、参照画像生成部16で生成された複数の参照画像と、標識位置推定部14で生成された計測画像との間でマッチング処理を実行し、各画像間の一致度を演算する。そして、一致度が最も高い参照画像を選択する。更に、選択された参照画像に設定されているx,y,z座標、及びヨー、ロール、ピッチに基づいて、地図上での車両位置、及び車両の姿勢角を推定する。即ち、自己位置推定部15は、地図情報に含まれる標識位置と、標識位置推定部14で推定された標識位置に基づいて、車両の地図上の位置を推定する機能を備えている。
The self-
上記のマッチング処理では、例えば、図7に示すように、計測画像Mの各画素と参照画像Nの各画素の乗算を乗算器31にて行い、更に、各乗算結果を加算する。そして、各参照画像Nについての加算値を比較し、加算値が最も大きくなる参照画像Nが、計測画像との間の一致度が最も高い画像であると判断する。詳細については後述する。
In the above matching process, for example, as shown in FIG. 7, multiplication of each pixel of the measurement image M and each pixel of the reference image N is performed by the
ここで、図1に示す反射光抽出部13、標識位置推定部14、自己位置推定部15、及び参照画像生成部16は、例えば、中央演算ユニット(CPU)や、RAM、ROM、ハードディスク等の記憶手段からなる一体型のコンピュータとして構成することができる。
Here, the reflected
次に、本実施形態に係る自己位置推定装置100の作用を、図2、図3に示すフローチャートを参照して説明する。初めに、図2のステップS11において、投光部11より車両周囲に点滅光を投光する。ステップS12において、撮像部12は、車両周囲を撮像する。撮像された画像には、点滅光が照射され標識(反射物)で反射した光が含まれる。
Next, the operation of the self-
ステップS13において、反射光抽出部13は、投光部11が点灯している際に撮像部12で撮像された画像と、消灯している際に撮像部12で撮像された画像との差分を演算する。その結果、撮像部12で撮像される画像の、各画素の受信強度が求められる。標識位置推定部14は、この受信強度を取得する。
In step S <b> 13, the reflected
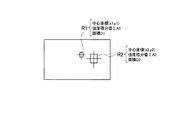
ステップS14において、標識位置推定部14は、受信強度が一定のレベル以上の領域を標識が存在する領域として設定する。例えば、車両の前方に四角形の標識が存在する場合には、該標識にて投光部11より投光した光が反射して撮像部12で撮像されるので、この標識に対応する画像領域にて受信強度が一定のレベル以上となる。従って、この画像領域を標識が存在する領域として設定する。その結果、例えば図5に示すように、撮像部12で撮像した画像中に、2つの画像領域R1、R2が設定される。
In step S14, the sign
ステップS15において、標識位置推定部14は、ステップS14の処理で設定した画像領域内の中心座標、受信強度の積分値、面積、及び受信強度の分布を演算する。具体的には、図5に示す画像領域R1に対して、中心座標(x1,y1)、受信強度積分値ΣA1、及び面積D1が演算され、更に、受信強度の分布が演算される。また、画像領域R2に対して、中心座標(x2,y2)、受信強度積分値ΣA2、及び面積D2が演算され、更に、受信強度の分布が演算される。面積D1及びD2は、例えば、予め設定される所定の受信強度値以上の画素の数から演算することができる。
In step S15, the marker
ステップS16において、標識位置推定部14は、ステップS15の処理で演算された各情報に基づいて、受信強度情報の再散布処理を実行し、車両V1の走行方向に対して直交する方向(画像横方向)についての光強度の変動分を補正する。以下、再散布処理を実行する理由を、図4に示す説明図を参照して説明する。
In step S <b> 16, the sign
図4(a)は、車両V1が走行路X1を走行しており、該走行路X1の右前方に標識Q2が存在し、更にその遠方に標識Q1が存在する状況を示している。車両V1より点滅光が投光されると、符号q1の曲線に示すように、光の強度は、車両V1の正面が最も高く、左右方向に向けて徐々に低くなる特性を有する。従って、反射光の受信強度はこの特性の影響を受けることになる。 FIG. 4 (a) shows a situation in which the vehicle V1 is traveling on the traveling path X1, the sign Q2 is present on the right front side of the traveling path X1, and the sign Q1 is further on the far side. When blinking light is projected from the vehicle V1, the intensity of the light is highest at the front of the vehicle V1 and gradually decreases in the left-right direction, as shown by the curve q1. Accordingly, the reception intensity of the reflected light is affected by this characteristic.
例えば、図4(b)に示すように標識Q1については、画角の変化に対して光の反射係数に大きな変化は無い。即ち、標識Q1の左端p1に示す反射係数と右端p2に示す反射係数に大差はない。これに対して、標識Q2については、画角の変化に対して光の反射係数が大きく変化する。即ち、標識Q2の左端p3に示す反射係数に対して右端p4に示す反射係数は著しく低下している。従って、標識Q2で反射した光が撮像部12で撮像されると、画像領域内の各画素で受信強度に大きな偏りが生じてしまい、正確な標識の位置推定ができなくなる。
For example, as shown in FIG. 4B, for the sign Q1, there is no significant change in the light reflection coefficient with respect to the change in the angle of view. That is, there is no great difference between the reflection coefficient shown at the left end p1 of the sign Q1 and the reflection coefficient shown at the right end p2. On the other hand, for the sign Q2, the light reflection coefficient changes greatly with respect to the change in the angle of view. That is, the reflection coefficient shown at the right end p4 is significantly lower than the reflection coefficient shown at the left end p3 of the sign Q2. Therefore, when the light reflected by the sign Q2 is picked up by the
そこで、図2のステップS16において、受信強度の再散布処理を実行し、車両V1の走行方向に対して直交する方向(画像横方向)についての光強度の変動分を補正する。以下、図3に示すフローチャートを参照して、再散布処理の詳細な処理手順について説明する。なお、図4(a)に示した標識Q1、Q2は、それぞれ図5に示す画像領域R1、R2に対応している。ここでは、一例として図5に示した画像領域R2の再散布処理について説明する。 Therefore, in step S16 in FIG. 2, the reception intensity re-spreading process is executed to correct the variation in the light intensity in the direction orthogonal to the traveling direction of the vehicle V1 (the image lateral direction). Hereinafter, with reference to the flowchart shown in FIG. 3, a detailed processing procedure of the respreading process will be described. Note that the signs Q1 and Q2 shown in FIG. 4A correspond to the image areas R1 and R2 shown in FIG. 5, respectively. Here, the re-spreading process for the image region R2 illustrated in FIG. 5 will be described as an example.
初めに、図3のステップS31において、標識位置推定部14は、図2のステップS14で設定された画像領域R2の受信強度の積分値ΣA2を取得する。
First, in step S31 of FIG. 3, the marker
ステップS32において、標識位置推定部14は、画像領域R2内における各画素の受信強度の分布に基づき、受信強度の重心座標Xc(図6(b)参照)を取得する。
In step S32, the sign
ステップS33において、標識位置推定部14は、画像縦方向が一定値で画像横方向が正規分布画像となるように受信強度を再散布する。即ち、画像領域R2で検出される信号強度は、図4で説明したように、画像領域R2内で偏りが存在する。具体的には、図6(a)に示すように、画像領域R2の左側の受信強度が大きく、右側に移動するにつれて受信強度が低下する。標識位置推定部14は、画像領域R2内における受信強度の積分値ΣA2が一定であるという条件下で、受信強度を正規化して各画素に受信強度を再散布する。具体的には、平均値μ、標準偏差σを用いて、下記(1)式で確率密度関数f(x)を演算する。

ステップS34において、標識位置推定部14は、上記の確率密度関数f(x)に基づいて再散布後の画像を生成する。再散布により得られた画像は、投光部11の光分布のばらつきによる受信強度の変動が均一化されている。即ち、図6(b)に示すように、正規分布を有する受信強度分布を有する計測画像に変換される。
In step S34, the marker
その後、ステップS35において、自己位置推定部15は、ステップS34の処理で演算された計測画像と、参照画像生成部16で生成された複数の参照画像とを比較することにより、車両の自己位置を推定する。具体的には、図7に示すように、乗算器31にて計測画像Mに含まれる各画素と参照画像Nに含まれる各画素の乗算を実行する。更に、各乗算結果を加算して加算値を求める。この演算を、複数の参照画像Nに対して全て実行する。
Thereafter, in step S35, the self-
計測画像Mと参照画像Nとの一致度が高いほど、上記の加算値が大きい値になる。従って、各参照画像Nのうち加算値が最も大きくなる参照画像を選択し、選択した参照画像のx,y,z座標、及びヨー、ピッチ、ロールを取得する。取得したx,y,z座標、及びヨー、ピッチ、ロールに基づいて、地図上での車両の位置を高精度に推定することができる。 The higher the degree of coincidence between the measurement image M and the reference image N, the larger the added value. Therefore, the reference image having the largest added value is selected from the reference images N, and the x, y, z coordinates, yaw, pitch, and roll of the selected reference image are acquired. Based on the acquired x, y, z coordinates and the yaw, pitch, and roll, the position of the vehicle on the map can be estimated with high accuracy.
このように、本実施形態に係る自己位置推定装置100では、GPS17で検出される車両の自己位置に基づいて、この自己位置で撮影されると予想される画像を、x,y,zの各座標、及びヨー、ピッチ、ロールを適宜変更して複数作成し、これらを参照画像とする。そして、各参照画像像と、再散布処理により得られた計測画像との間で、各画素の乗算を実施し、更に各乗算値を加算する。画像の一致度が高い画像は、加算値が大きくなる。よって、複数の参照画像のうち、計測画像との間の加算値が最も大きいものが、計測画像と一致度が高い参照画像であると判断できる。従って、一致度が最も高いと判断された参照画像のx,y,z座標、及びヨー、ピッチ、ロールに基づいて、車両の自己位置を推定する。こうして、車両の自己位置を高精度に推定する。
Thus, in the self-
つまり、車両の走行路に存在する標識を検出し、地図上での車両位置を推定する場合において、多くの標識が反射素材を用いており、点滅光源を用いたときに、その形状や受信強度情報は、反射率と距離に応じて変化する。その際、反射光の受信強度は、距離や反射物の傾き、光学的な正反射の有無等に影響され易く、計測画像と複数の参照画像との乗算を実施する場合には、上記の影響が誤差要因となる場合がある。 In other words, when detecting signs on the road of the vehicle and estimating the vehicle position on the map, many signs use reflective material, and when using a blinking light source, its shape and received intensity Information varies with reflectivity and distance. At that time, the reception intensity of the reflected light is easily affected by the distance, the inclination of the reflecting object, the presence or absence of optical regular reflection, and the like when the multiplication of the measurement image and a plurality of reference images is performed. May be an error factor.
本実施形態では、標識の反射面の反射強度情報を正規分布補正した画像の画素値と、自車両候補位置から生成した参照画像の画素値との乗算を行うので、反射光学的な誤差要因を低減し、反射板の重心付近でマッチングの合計値が高くなる。従って、反射物の形状に依存し難く位置情報を特定することができることになる。 In this embodiment, the pixel value of the image obtained by normal distribution correction of the reflection intensity information on the reflecting surface of the sign is multiplied by the pixel value of the reference image generated from the own vehicle candidate position. The total value of matching increases near the center of gravity of the reflector. Therefore, the position information can be specified without depending on the shape of the reflector.
ここで、上述した実施形態では、x,y,z座標、及びヨー、ピッチ、ロールを適宜変更した参照画像を作成し、この参照画像とのマッチング処理にて加算値が最も大きい参照画像を特定する例について説明したが、周知の技術であるパーティクルフィルタを用いてマッチング処理を実行することもできる。 Here, in the above-described embodiment, a reference image in which the x, y, and z coordinates, the yaw, the pitch, and the roll are appropriately changed is created, and the reference image having the largest added value is specified by matching processing with the reference image. Although the example to do was demonstrated, a matching process can also be performed using the particle filter which is a well-known technique.
即ち、図1に示す自己位置推定部15は、パーティクルフィルタを用いて所定範囲のパーティクル存在分布範囲を設定する。そして、設定した存在分布範囲内にパーティクルフィルタを散布して、各パーティクルフィルタにて予測される複数の車両姿勢に基づいて、地図情報に含まれる標識位置と、標識位置推定部14で推定された標識位置とのマッチング処理を実施して車両の地図上の位置、及び姿勢角を推定することも可能である。
That is, the self-
このようにして、本実施形態に係る自己位置推定装置100では、反射面の反射強度情報を正規化し、正規化した計測画像を用いて参照画像とのマッチング処理を実施する。従って、標識の形状や反射率等の光学的な特性に影響されることなく、高精度に計測画像を生成することができ、ひいては自己位置を高精度に推定することが可能となる。
In this way, the self-
また、投光部11より、周期的に点灯、消灯が切り替わる点滅光を投光し、点滅光が点灯している際の画像、及び点滅光が消灯しているときの画像から、反射物からの反射光を検出する。従って、他の光源等の影響を低減することができ、標識位置の検出を高精度に行うことが可能となる。
In addition, the
更に、標識位置推定部14は、抽出した領域の、水平方向に抽出した反射光の面積、及び反射強度の分布に基づいて、標識位置を検出する。即ち、強度分布を検出する際に、光学的な位置関係の影響が大きい水平方向について評価することで、強度分布による影響を抑えて、面積及び強度の積分値から高精度に位置を測定することが可能となる。
Further, the marker
また、上述した実施形態では、x,y,z座標、及びヨー、ピッチ、ロールが相違する複数の参照画像を生成し、各参照画像と計測画像との一致度を求めて、車両の自己位置を推定する例について説明したが、パーティクルフィルタを用いることも可能である。 In the above-described embodiment, a plurality of reference images having different x, y, and z coordinates, yaw, pitch, and roll are generated, and the degree of coincidence between each reference image and the measurement image is obtained to determine the self-position of the vehicle. Although an example of estimating the above has been described, it is also possible to use a particle filter.
更に、パーティクルフィルタを用いて計測画像との一致度を求める場合には、所定範囲内の探索を行う際に、反射強度を重み付けに含めて探索することで、より強い反射が得られる反射物に応じた自己位置計測の結果が得られる。従って、自己位置の推定精度をより一層向上させることが可能となる。 Furthermore, when the degree of coincidence with the measurement image is obtained using a particle filter, when performing a search within a predetermined range, the reflection intensity is included in the weighting to search for a reflector that can obtain a stronger reflection. A corresponding self-position measurement result is obtained. Therefore, it is possible to further improve the self-position estimation accuracy.
[変形例の説明]
上記した実施形態では、点滅光を投光して、標識が存在する領域を検出する例について説明したが、周期変化された光を投光し、撮像された画像から、その周期と同期した光を抽出して同期画像を生成する同期検波処理を用いることも可能である。具体的には、投光部11より送信する信号をS(t)とし、これをsin(ωt)で変調する。更に、撮像部12で撮像された画像データにsin(ωt)を乗じる。すると、下記(2)式の関係から、ローパスフィルタで高周波成分を除去すれば、信号S(t)を抽出できる。
S(t)*sin(ωt)*sin(ωt)=S(t)*(1−cos(2ωt))/2 …(2)
なお、同期検波方式は、周知の技術であるので、詳細な説明を省略する。そして、同期検波処理を用いることにより、より高精度に標識位置を推定することが可能となる。
[Description of modification]
In the above-described embodiment, the example in which the blinking light is projected to detect the area where the sign is present has been described. However, the light that is periodically changed is projected, and the light that is synchronized with the period is captured from the captured image. It is also possible to use a synchronous detection process that extracts a signal to generate a synchronous image. Specifically, a signal transmitted from the
S (t) * sin (ωt) * sin (ωt) = S (t) * (1-cos (2ωt)) / 2 (2)
Since the synchronous detection method is a well-known technique, detailed description thereof is omitted. Then, by using the synchronous detection process, it is possible to estimate the marker position with higher accuracy.
即ち、投光部11は、周期的に輝度が変化する光を投光し、反射光抽出部13は、撮像部12で取得された画像から、輝度の周期的変化と同期する反射光を抽出する。そして、この反射光に基づいて同期画像を生成し、この同期画像を計測画像として用いる。従って、反射光の強度を正確に計測するために、同期検波回路を設けて、投光部11と同調して反射光の周期的な変調を検知し、振幅強度を観測できるので、画像中に存在する標識位置の検出を、より高精度に実施することが可能となる。
That is, the
以上、本発明の自己位置推定装置、及び自己位置推定方法を図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置き換えることができる。 The self-position estimation apparatus and self-position estimation method of the present invention have been described based on the illustrated embodiment. However, the present invention is not limited to this, and the configuration of each unit is an arbitrary function having the same function. It can be replaced with that of the configuration.
11 投光部
12 撮像部
13 反射光抽出部
14 標識位置推定部
15 自己位置推定部
16 参照画像生成部
17 GPS
31 乗算器
100 自己位置推定装置
DESCRIPTION OF
31
Claims (5)
車両に搭載され、前記投光部より光が投光された領域を含む車両周囲を撮像する撮像部と、
前記撮像部で撮像された画像から、前記投光部より投光された光の反射光を抽出する反射光抽出部と、
前記反射光抽出部にて抽出された反射光に基づいて、前記撮像部で撮像された画像から反射物の画像領域を設定し、前記画像領域の面積、中心座標、受信強度の分布、及び受信強度の積分値に基づいて、車両周囲に存在する標識位置を推定する標識位置推定部と、
車両周囲に存在する標識位置を含む地図情報を取得する地図情報取得部と、
前記地図情報に含まれる標識位置と、前記標識位置推定部で推定された標識位置に基づいて、前記車両の地図上の位置を推定する自己位置推定部と、
を備えたことを特徴とする自己位置推定装置。 A light projecting unit mounted on the vehicle and projecting light around the vehicle;
An imaging unit that is mounted on a vehicle and that images a vehicle periphery including an area where light is projected from the light projecting unit;
A reflected light extraction unit that extracts reflected light of light projected from the light projecting unit from an image captured by the imaging unit;
Based on the reflected light extracted by the reflected light extraction unit , an image area of a reflecting object is set from the image captured by the imaging unit, and the area of the image area, the center coordinates, the distribution of received intensity, and the reception A sign position estimator for estimating a sign position existing around the vehicle based on the integrated value of the intensity ;
A map information acquisition unit for acquiring map information including sign positions existing around the vehicle;
A self-position estimating unit that estimates a position of the vehicle on the map based on the sign position included in the map information and the sign position estimated by the sign position estimating unit;
A self-position estimation apparatus comprising:
前記反射光抽出部は、前記撮像部で取得された画像から、前記輝度の周期的変化と同期する反射光を抽出すること
を特徴とする請求項1に記載の自己位置推定装置。 The light projecting unit projects light whose luminance periodically changes,
The self-position estimation apparatus according to claim 1, wherein the reflected light extraction unit extracts reflected light that is synchronized with a periodic change in luminance from an image acquired by the imaging unit.
を特徴とする請求項2に記載の自己位置推定装置。 3. The self-position estimation according to claim 2, wherein the sign position estimation unit detects the sign position based on an area of reflected light extracted in a horizontal direction and a distribution of reflection intensity in the extracted region. apparatus.
設定した存在分布範囲内に散布したパーティクルと、前記車両が所定時間に進んだ後のパーティクルの位置関係から予測される複数の車両姿勢と、地図情報に含まれる標識位置と、前記標識位置推定部で推定された標識位置に基づいて、前記車両の地図上の位置、及び姿勢角を推定すること
を特徴とする請求項1〜3のいずれか1項に記載の自己位置推定装置。 The self-position estimation unit sets a predetermined particle presence distribution range using a particle filter,
Particles dispersed within a set presence distribution range, a plurality of vehicle postures predicted from the positional relationship of the particles after the vehicle has advanced for a predetermined time, a marker position included in map information, and the marker position estimation unit The self-position estimation apparatus according to any one of claims 1 to 3, wherein a position and a posture angle of the vehicle on the map are estimated based on the sign position estimated in (4).
前記光が投光された領域を含む車両周囲を撮像する工程と、
前記車両周囲の画像から、前記光の反射光を抽出する工程と、
前記抽出された反射光に基づいて、前記車両周囲の画像から反射物の画像領域を設定し、前記画像領域の面積、中心座標、受信強度の分布、及び受信強度の積分値に基づいて、車両周囲に存在する標識位置を推定する工程と、
車両周囲に存在する標識位置を含む地図情報を取得する工程と、
前記地図情報に含まれる標識位置と、推定された標識位置に基づいて、前記車両の地図上の位置を推定する工程と、
を備えたことを特徴とする自己位置推定方法。
Projecting light around the vehicle;
Imaging a vehicle periphery including a region where the light is projected;
Extracting reflected light of the light from an image around the vehicle;
Based on the extracted reflected light, to set the image area of the reflector from the vehicle around the image, the area of the image region, the center coordinates, the reception intensity distribution, and based on the integrated value of the reception intensity, vehicle Estimating a surrounding marker position;
Obtaining map information including sign positions present around the vehicle;
Estimating the position of the vehicle on the map based on the sign position included in the map information and the estimated sign position;
A self-position estimation method comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015157925A JP6477348B2 (en) | 2015-08-10 | 2015-08-10 | Self-position estimation apparatus and self-position estimation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015157925A JP6477348B2 (en) | 2015-08-10 | 2015-08-10 | Self-position estimation apparatus and self-position estimation method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017036980A JP2017036980A (en) | 2017-02-16 |
| JP6477348B2 true JP6477348B2 (en) | 2019-03-06 |
Family
ID=58047583
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015157925A Active JP6477348B2 (en) | 2015-08-10 | 2015-08-10 | Self-position estimation apparatus and self-position estimation method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6477348B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6984256B2 (en) * | 2017-09-11 | 2021-12-17 | ソニーグループ株式会社 | Signal processing equipment, and signal processing methods, programs, and mobiles. |
| JP2020034472A (en) * | 2018-08-31 | 2020-03-05 | 株式会社デンソー | Map system, method and storage medium for autonomous navigation |
| JP2023066524A (en) * | 2021-10-29 | 2023-05-16 | ソニーグループ株式会社 | Information processor, method for processing information, and information processing system |
| CN115050206B (en) * | 2022-06-09 | 2023-06-27 | 陕西工业职业技术学院 | Intelligent parking lot parking car-searching navigation system based on smart phone |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4321142B2 (en) * | 2003-07-02 | 2009-08-26 | 日産自動車株式会社 | Sign recognition device |
| JP4847090B2 (en) * | 2005-10-14 | 2011-12-28 | クラリオン株式会社 | Position positioning device and position positioning method |
| JP5200861B2 (en) * | 2007-12-10 | 2013-06-05 | 富士通株式会社 | Sign judging device and sign judging method |
| JP5992184B2 (en) * | 2012-03-09 | 2016-09-14 | 株式会社トプコン | Image data processing apparatus, image data processing method, and image data processing program |
-
2015
- 2015-08-10 JP JP2015157925A patent/JP6477348B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017036980A (en) | 2017-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Reynolds et al. | Capturing time-of-flight data with confidence | |
| JP6667065B2 (en) | Position estimation device and position estimation method | |
| CN109831660B (en) | Depth image acquisition method, depth image acquisition module and electronic equipment | |
| JP6125188B2 (en) | Video processing method and apparatus | |
| JP5472538B2 (en) | Distance measuring device and environmental map generating device | |
| EP2072947B1 (en) | Image processing device and image processing method | |
| US10156437B2 (en) | Control method of a depth camera | |
| US20190188860A1 (en) | Detection system | |
| KR20130099735A (en) | Method and fusion system of time-of-flight camera and stereo camera for reliable wide range depth acquisition | |
| JP6477348B2 (en) | Self-position estimation apparatus and self-position estimation method | |
| WO2009110082A1 (en) | Image photographic device, image photographic method, and image photographic program | |
| JP6566768B2 (en) | Information processing apparatus, information processing method, and program | |
| US20150268035A1 (en) | Information processing apparatus, information processing method, and storage medium | |
| EP3002550B1 (en) | Information processing system and information processing method for distance measurement | |
| US10240913B2 (en) | Three-dimensional coordinate measuring apparatus and three-dimensional coordinate measuring method | |
| CN112313541A (en) | Apparatus and method | |
| US10348961B2 (en) | Camera modeling system | |
| US20160259034A1 (en) | Position estimation device and position estimation method | |
| JP2015059768A (en) | Level difference measuring device, level difference measuring method and program | |
| JP2014067193A (en) | Image processing apparatus and image processing method | |
| KR20180061803A (en) | Apparatus and method for inpainting occlusion of road surface | |
| JP6425406B2 (en) | INFORMATION PROCESSING APPARATUS, INFORMATION PROCESSING METHOD, AND PROGRAM | |
| JP2013257244A (en) | Distance measurement device, distance measurement method, and distance measurement program | |
| JP6452361B2 (en) | Information processing apparatus, information processing method, and program | |
| WO2019016879A1 (en) | Object detection device and object detection method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181122 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190121 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6477348 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |