JP6351663B2 - Spherical video imaging device, global sphere video imaging system, omnidirectional video imaging program, recording medium recording the same, and omnidirectional video imaging method - Google Patents
Spherical video imaging device, global sphere video imaging system, omnidirectional video imaging program, recording medium recording the same, and omnidirectional video imaging method Download PDFInfo
- Publication number
- JP6351663B2 JP6351663B2 JP2016124164A JP2016124164A JP6351663B2 JP 6351663 B2 JP6351663 B2 JP 6351663B2 JP 2016124164 A JP2016124164 A JP 2016124164A JP 2016124164 A JP2016124164 A JP 2016124164A JP 6351663 B2 JP6351663 B2 JP 6351663B2
- Authority
- JP
- Japan
- Prior art keywords
- video
- omnidirectional
- image
- omnidirectional video
- unidirectional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Studio Devices (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Accessories Of Cameras (AREA)
- Closed-Circuit Television Systems (AREA)
Description
本発明は、撮影車や操作者が映らない全天球映像を生成する全天球映像撮影装置等に関する。 The present invention relates to an omnidirectional video image capturing device that generates an omnidirectional video image in which a photographing vehicle and an operator are not reflected.
現在、全国において地域創生の施策が実施されている。地域創生においては、地域中心商業施設や商店街の活性化、道の駅や直売所等の農産物販売施設の設置、観光施設のPR(広報・宣伝活動)の情報発信が重要である。また、現在、福島の原子力事故において、建物の構図はあるが施設内に設置されている各設備がどのように設置されていたか分からないという事態がある。 Currently, regional revitalization measures are being implemented nationwide. In regional revitalization, it is important to revitalize regional commercial facilities and shopping streets, establish agricultural products sales facilities such as roadside stations and direct sales offices, and disseminate information on PR (public relations / advertisement activities) of tourist facilities. At present, in the nuclear accident in Fukushima, there is a situation where there is a composition of the building, but it is not known how each facility installed in the facility was installed.
特許文献1に記載の「地図誘導映像システム」は、インターネット等の通信回線を利用する地図データ紹介システムで、利用者のパソコンにおいて、検索した地域地図画面上での誘導矢印による誘導に沿って地図画面上を進行すると、それに同期して、実際にその道路を通行した際に見える道路通行視覚映像を表示するシステムに関するものである。
The "map guidance video system" described in
このシステムは、地図画面における道路を、交差点から交差点までの道路ブロック毎に道路ブロック番号を付与する構成とすることで、予め出発地から目的地を指定してこれらの道路ブロックを探査して組み合わせた経路を案内表示するか、あるいは利用者が交差点毎に左折、直進、右折、戻りを選択して道路ブロックを選択することができる。さらに進行速度もブロック毎に選択指定し変えることもでき、また、一時停止中や経路上を進行中の誘導矢印が飛び越えて移動するという移動地点の変更も可能な柔軟性ある道路誘導システムを実現している。 In this system, roads on the map screen are assigned a road block number for each road block from the intersection to the intersection, and these road blocks are searched and combined by designating the destination from the departure point in advance. The user can select a road block by guiding the displayed route, or selecting a left turn, straight ahead, right turn, or return for each intersection. In addition, you can select and change the traveling speed for each block, and realize a flexible road guidance system that can change the moving point such as temporarily stopping or moving the guidance arrow moving over the route doing.
また、特許文献2に記載の「地図誘導全方位映像システム」は、映像を全方位映像(上下の映像なし)としているが、映像の拡大や縮小はできたものの拡大すると映像の画質が悪くなる点や映像表示画面を大きくすることは通信回線上できないという問題があった。
In addition, the “map-guided omnidirectional video system” described in
さらに、特許文献3に記載の「映像レイヤーリンク対応映像誘導システム」は、全方位走行映像にリンクを可能とするもので、インターネット等の通信回線を利用し、街路(道路)の走行や百貨店の売場通路を回遊して予め撮影された映像データにリンクをはることを可能とし、街路や売場通路を映像で誘導しながら、映像上の建物、店舗、売場等のリンクにより、それらのホームページやウェブカメラのライブ映像表示画面を見るものである。 Furthermore, the “video layer link-compatible video guidance system” described in Patent Document 3 enables a link to an omnidirectional running video, and uses a communication line such as the Internet to run on a street (road) or a department store. It is possible to make a link to video data taken in advance by going around the sales floor corridor, and guiding the streets and sales floor corridors with video, and by linking the buildings, stores, sales floors, etc. on the video, A live video display screen of a webcam is viewed.
これらのシステムは、ADSL(非対称デジタル加入者線)が一般的な頃のもので、現在のような光回線ではなかったため、映像配信とGIS(地理情報システム)における誘導を同時に配信するには通信回線速度に限界があった。また、携帯電話を利用したインターネット接続サービスが普及していたころで、現在一般的に利用されているスマートフォンはなく、全方位映像撮影サービスや地図誘導全方位映像システムのニーズもない状況であった。 These systems are the days when ADSL (Asymmetric Digital Subscriber Line) was common, and they were not optical lines as they are today. Therefore, communication is necessary to simultaneously distribute video distribution and guidance in GIS (Geographic Information System). There was a limit to the line speed. Also, when Internet connection services using mobile phones were widespread, there were no smartphones currently in general use, and there was no need for omnidirectional video shooting services or map-guided omnidirectional video systems. .
現在では、ハイビジョン映像レベルの撮影が可能であり、モバイル環境においても大容量の映像配信が可能となっている。また、家庭においても光通信が一般的で、スマートフォンやタブレット端末においてもLTE等の高速通信方式が採用され、大容量を要する映像配信も問題なく動作する環境が整っている。 Currently, high-definition video level photography is possible, and large-capacity video distribution is possible even in mobile environments. In addition, optical communication is common in homes, and high-speed communication methods such as LTE are adopted in smartphones and tablet terminals, and an environment in which video distribution requiring large capacity can be operated without any problem is set up.
世界中の道路沿いの風景をパノラマ写真で提供するインターネットサービスとして、米国Google社の「ストリートビュー」があるが、ストリートビューは静止画であり、任意の始点と終点を自動的に誘導することはできない。 Google's “Street View” is an internet service that provides panoramic pictures of landscapes along roads around the world. Street View is a still image, and it is not possible to automatically guide any start and end points. Can not.
インターネットの通信回線を通して全天球映像の走行映像で商店街の街路、商業施設や店舗建物内の通路を誘導すれば、映像上の被写体をクリックすることにより施設情報や製品情報の提供、商品のネット販売が可能となる。なお、全天球映像とは、撮影基点を中心に複数のカメラがついている機材によって撮影される上下・左右・斜めの全周囲をパソコン上で見ることが可能な映像である。 If you guide a street in a shopping street, a commercial facility, or a passage in a store building with a traveling image of a celestial sphere through an Internet communication line, you can click on the subject on the image to provide facility information and product information, Online sales are possible. Note that the omnidirectional video is a video that can be viewed on a personal computer on the entire top / bottom, left / right, and diagonal surroundings taken by equipment equipped with a plurality of cameras with the photographing base point as the center.
例えば、インターネットを介して、商店街の街区を自由に経路選択し、その経路上の矢印の進行スピードにあわせて全天球映像が再生され、実際にその場所に行ったときのような臨場感で回遊することが可能となる。また、走行映像上にリンクを張りクリックすると店舗等の情報を表示すれば、より詳細な情報提供が可能となる。 For example, you can freely select a route in a shopping district via the Internet, and the celestial sphere image will be played according to the speed of the arrow on the route, making you feel as if you were actually at that location. It is possible to travel around. Further, if a link is clicked on the traveling image and clicked to display information such as a store, more detailed information can be provided.
全天球走行映像を撮影するためには、人が撮影機材を持って歩くか、撮影車で撮影しなければならない。その場合、撮影カメラの映像は、全天球映像であるため撮影する人や撮影車自体も映ってしまい、道路や通路等の下側の状況を撮影できないという問題がある。そのため、人(操作者)や撮影車の画像や映像の削除作業、画像マスク処理、類似画像で補正するといった作業を行う必要がある。 In order to shoot a celestial sphere image, a person must walk with a photographic equipment or shoot with a photographic car. In that case, since the image of the camera is a celestial sphere image, the person who is shooting and the shooting vehicle itself are also reflected, and there is a problem that the situation below the road or the passage cannot be taken. Therefore, it is necessary to perform operations such as deleting an image or video of a person (operator) or a photographing vehicle, image mask processing, and correcting with a similar image.
そこで、本発明は、撮影車や操作者が映らない全天球映像を生成することを目的とする。 SUMMARY OF THE INVENTION An object of the present invention is to generate a spherical image that does not show a photographing vehicle or an operator.
上記の課題を解決するために、本発明である全天球映像撮影装置は、全方位の映像を撮影可能な複眼の全天球映像カメラと、一方向の映像を撮影する一眼映像カメラと、前記全天球映像カメラ及び前記一眼映像カメラを搭載するためのカメラ架台と、を備え、前記カメラ架台は、垂立する支柱から上方に延びる縦部材と、前記支柱から後方に延びる横部材と、を有し、前記全天球映像カメラは、前記縦部材に設置され、前記カメラ架台を設置した移動体を含む視野の全方位映像を撮影し、前記一眼映像カメラは、前記横部材に設置され、前記全方位映像の視野の一部であって前記移動体が含まれない視野の一方向映像を撮影し、前記全天球映像カメラで撮影した全方位映像に、前記一眼映像カメラで撮影した一方向映像が合成されて、前記移動体が含まれない全天球映像が生成される、ことを特徴とする。 In order to solve the above-described problems, the omnidirectional video imaging device according to the present invention includes a compound-eye omnidirectional video camera capable of capturing an omnidirectional video, a single-lens video camera that captures a unidirectional video, A camera frame for mounting the omnidirectional video camera and the single-lens video camera, and the camera frame includes a vertical member extending upward from a supporting column, and a horizontal member extending rearward from the column. The omnidirectional video camera is installed on the vertical member and shoots an omnidirectional video of a field of view including a moving body on which the camera mount is installed, and the single-lens video camera is installed on the horizontal member. A unidirectional image of a field of view that is a part of the field of view of the omnidirectional video and does not include the moving object was photographed, and an omnidirectional video photographed by the omnidirectional video camera was photographed by the single-lens video camera. A one-way video is synthesized and Omnidirectional images containing no body is generated, characterized in that.
また、前記全天球映像撮影装置は、前記全天球映像カメラ及び前記一眼映像カメラが、振動を防止するジンバルを介して前記カメラ架台に搭載される、ことを特徴とする。 The omnidirectional video imaging apparatus is characterized in that the omnidirectional video camera and the single-lens video camera are mounted on the camera mount via a gimbal that prevents vibration.
また、前記全天球映像撮影装置は、前記全天球映像が、前記全方位映像と前記一方向映像との、前記移動体の進行速度に伴う同一場面の撮影時間差が同期され、撮影範囲が一致する範囲が抽出され、高度差に基づいて遠近が補正されることによって合成される、ことを特徴とする。 In addition, the omnidirectional video imaging apparatus is configured such that the omnidirectional video is synchronized with the photographic time difference between the omnidirectional video and the unidirectional video in the same scene according to the moving speed of the moving body, A matching range is extracted and synthesized by correcting the perspective based on the altitude difference.
本発明である全天球映像撮影システムは、移動体の上方から撮影した全方位の映像を取得するための全天球映像撮影手段と、前記移動体の後方において撮影した一方向の映像を取得するための一眼映像撮影手段と、前記全天球映像撮影手段から取得した前記移動体を含む視野の全方位映像、及び前記一眼映像撮影手段から取得した前記全方位映像の視野の一部であって前記移動体が含まれない視野の一方向映像を記憶するための記憶手段と、を有し、コンピュータが、前記記憶手段に記憶された全方位映像に、前記記憶手段に記憶された一方向映像を合成することにより、前記移動体が含まれない全天球映像を生成する、ことを特徴とする。 An omnidirectional video imaging system according to the present invention acquires an omnidirectional video imaging means for acquiring an omnidirectional video imaged from above a moving body and a unidirectional video image taken behind the moving body. And a part of the field of view of the omnidirectional video acquired from the single-lens video imaging unit, and the omnidirectional video of the visual field including the moving body acquired from the omnidirectional video imaging unit. Storage means for storing a unidirectional image of a visual field that does not include the moving body, and the computer stores the unidirectional image stored in the storage device into an omnidirectional image stored in the storage device. A celestial sphere image that does not include the moving object is generated by synthesizing the images.
また、前記全天球映像撮影システムは、前記記憶手段が、コンピュータネットワーク上の記憶装置である、ことを特徴とする。 Further, the omnidirectional video imaging system is characterized in that the storage means is a storage device on a computer network.
本発明である全天球映像撮影プログラム(記録媒体に記録されたものを含む)は、移動体の上方から撮影した前記移動体を含む視野の全方位映像を取得して記憶手段に保存する全方位映像保存ステップと、前記移動体の後方において撮影した前記全方位映像の視野の一部であって前記移動体が含まれない視野の一方向映像を取得して記憶手段に保存する一方向映像保存ステップと、保存された前記全方位映像と保存された前記一方向映像との前記移動体の進行速度に伴う同一場面の撮影時間差を同期させる再生場面同期ステップと、同期された前記全方位映像の撮影範囲うち同期された前記一方向映像の撮影範囲と一致する部分を抽出する撮影範囲抽出ステップと、抽出された前記全方位映像と抽出された前記一方向映像との高度差に基づいて遠近を補正する遠近補正ステップと、補正された前記全方位映像に補正された前記一方向映像を合成し、前記移動体が含まれない全天球映像を生成する全天球映像合成ステップと、を有する、ことを特徴とする。 The omnidirectional video imaging program (including those recorded on a recording medium) according to the present invention acquires all omnidirectional video images of the field of view including the moving body taken from above the moving body and stores them in the storage means. An azimuth image storage step, and a unidirectional image that is a part of the field of view of the omnidirectional image captured behind the moving body and that does not include the moving body and that is stored in a storage unit A storing step, a reproduction scene synchronizing step of synchronizing a shooting time difference of the same scene according to a moving speed of the moving body between the stored omnidirectional video and the stored unidirectional video, and the synchronized omnidirectional video A shooting range extracting step of extracting a portion that coincides with the synchronized shooting range of the one-way video, and an altitude difference between the extracted omnidirectional video and the extracted one-way video. A perspective correction step for correcting perspective, and a omnidirectional video synthesis step for synthesizing the corrected unidirectional video with the corrected omnidirectional video to generate a omnidirectional video that does not include the moving body; It is characterized by having.
本発明である全天球映像撮影方法は、移動体の上方から撮影した前記移動体を含む視野の全方位映像を取得し、前記移動体の後方において撮影した前記全方位映像の視野の一部であって前記移動体が含まれない視野の一方向映像を取得し、取得された前記全方位映像と取得された前記一方向映像との前記移動体の進行速度に伴う同一場面の撮影時間差を同期させ、同期された前記全方位映像の撮影範囲うち同期された前記一方向映像の撮影範囲と一致する部分を抽出し、抽出された前記全方位映像と抽出された前記一方向映像との高度差に基づいて遠近を補正し、補正された前記全方位映像に補正された前記一方向映像を合成し、前記移動体が含まれない全天球映像を生成する、ことを特徴とする。 The omnidirectional video image capturing method according to the present invention acquires an omnidirectional video image of a visual field including the moving object imaged from above the mobile object, and a part of the visual field of the omnidirectional video imaged behind the mobile object. A unidirectional image of a field of view that does not include the moving object is acquired, and an imaging time difference of the same scene according to the moving speed of the moving object between the acquired omnidirectional image and the acquired unidirectional image is calculated. Synchronize and extract a portion that coincides with the synchronized shooting range of the unidirectional video out of the synchronized shooting range of the omnidirectional video, and the height of the extracted omnidirectional video and the extracted unidirectional video The perspective is corrected based on the difference, and the corrected unidirectional video is synthesized with the corrected omnidirectional video to generate an omnidirectional video that does not include the moving object.
本発明によれば、撮影車や操作者が映らない全天球映像を生成することができる。現在の通信環境に合わせた高画質画面や拡大再生画面等にして、OS(オペレーティングシステム)やインターネット利用モバイル機器など機種に左右されずに稼動させることが可能であり、街路(道路)の走行や商店街、店舗の売場、観光施設、公園、アミューズメント施設等に利用することができる。また、防災システムとしても活用が可能である。 According to the present invention, it is possible to generate a celestial sphere image that does not show a photographing vehicle or an operator. It can be operated without depending on the model such as OS (Operating System) and Internet-enabled mobile devices, with high-quality screens and enlarged playback screens adapted to the current communication environment, and can be run on streets (roads) It can be used for shopping streets, store floors, tourist facilities, parks, amusement facilities, etc. It can also be used as a disaster prevention system.
以下に、本発明の実施形態について図面を参照して詳細に説明する。なお、同一機能を有するものは同一符号を付け、その繰り返しの説明は省略する場合がある。 Embodiments of the present invention will be described below in detail with reference to the drawings. In addition, what has the same function attaches | subjects the same code | symbol, and the repeated description may be abbreviate | omitted.
ここで、全方位映像とは、全天球映像カメラを使用して上下方向及び左右方向(及び前後方向)を360度に渡り撮影した全方位の動画データとする。一方向映像とは、一眼映像カメラを使用して所定の方向(例えば、下向き)を撮影した一方向の動画データとする。全天球映像とは、全方位映像と一方向映像を合成して不要な情報を除去した動画データとし、それを球状に合成すればパノラマ的な映像となる。なお、動画データは、高精細な映像を使用しても良い。 Here, the omnidirectional video is omnidirectional video data obtained by shooting 360 degrees in the vertical direction and the horizontal direction (and the longitudinal direction) using an omnidirectional video camera. The unidirectional video is unidirectional video data obtained by photographing a predetermined direction (for example, downward) using a single-lens video camera. The omnidirectional video is a moving image data in which unnecessary information is removed by synthesizing the omnidirectional video and the unidirectional video, and if it is synthesized into a spherical shape, it becomes a panoramic video. Note that high-definition video may be used as the moving image data.
まず、本発明である全天球映像撮影装置について説明する。図1は、全天球映像撮影装置の概要を示す図である。図1に示すように、全天球映像撮影装置100は、全天球映像カメラ200、一眼映像カメラ300、カメラ架台400、及び移動体500等を有する。
First, the omnidirectional video imaging apparatus according to the present invention will be described. FIG. 1 is a diagram showing an overview of an omnidirectional video imaging apparatus. As shown in FIG. 1, the omnidirectional
全天球映像カメラ200は、全方位の映像を撮影可能な複眼のカメラ(例えば、6つのカメラ)であり、カメラ架台400を介して移動体500の上方に設置される。全天球映像カメラ200において視野220を下方向にしたときは、全方位映像のうち撮影範囲230の映像が取得される。なお、視野220が示す二等辺三角形の範囲内に移動体500や一眼映像カメラ300が配置される。このとき、取得される映像は、撮影範囲230内の地面510以外に、移動体500、カメラ架台400、一眼映像カメラ300等を含む映像となる。
The
一眼映像カメラ300は、一方向の映像を撮影するカメラであり、カメラ架台400を介して移動体500の後方に設置される。一眼映像カメラ300の視野320は、全天球映像カメラ200で特定した視野220と同じ方向(下向き)にし、撮影範囲330の一方向映像を取得する。
The single-
なお、一方向映像における撮影範囲330は、全方位映像における撮影範囲230の一部であって、移動体500が含まれないようにする。全方位映像における撮影範囲230の後端を基点231としたとき、一方向映像における撮影範囲330は、移動体500の後方から基点231までが映るように一眼映像カメラ300の角度等を調整すれば良い。
Note that the
カメラ架台400は、全天球映像カメラ200及び一眼映像カメラ300を移動体500に搭載するために設けられる。カメラ架台400は、移動体500の後部から支柱410を垂立させる。支柱410からは、さらに上方に延びる縦部材420と、後方に延びる横部材430とに分岐する。
The
縦部材420は、上下方向に伸縮可能であり、上端に全天球映像カメラ200が設置される。横部材430は、前後方向に伸縮可能であり、後端に一眼映像カメラ300が下向きに設置される。なお、支柱410についても上下方向に伸縮可能としても良い。
The
全天球映像カメラ200のカメラ架台400への取り付けは、ジンバル210を介して縦部材420に行う。また、一眼映像カメラ300のカメラ架台400への取り付けは、ジンバル310を介して横部材430に行う。ジンバル210、310は、全天球映像カメラ200及び一眼映像カメラ300の撮影方向(例えば、水平方向)を維持するために用いる。ジンバル210、310は、加速度センサーやモーター等を利用して、重量に対して垂直位置を維持するものであれば良い。
The
ジンバル210、310により移動体500の移動に伴う振動を吸収し、全方位映像及び一方向映像のブレを取り除くことで、全天球映像カメラ200及び一眼映像カメラ300による撮影を安定させる。また、道路の勾配や段差に対して全天球映像カメラ200及び一眼映像カメラ300の角度を自動補正しても良い。
The
移動体500は、全天球映像撮影装置100を移動させるための撮影車である。人が搭乗して撮影車を直接操作しても、人が載らずに撮影車を遠隔操作しても、撮影車が自動走行しても良い。撮影車が走行できないような場所においては、ロボットや人等その他の移動手段を利用しても良い。
The moving
全天球映像撮影装置100については、全天球映像カメラ200で撮影した全方位映像に、一眼映像カメラ300で撮影した一方向映像を合成して、全天球映像を生成するための制御装置及び記憶装置を組み合わせた全天球映像撮影システムとしても良い。
The omnidirectional
全天球映像撮影システムでは、全方位映像と一方向映像とを、移動体500の進行速度に伴う同一場面の撮影時間差を同期させ、撮影範囲が一致する範囲を抽出し、高度差に基づいて遠近を補正することによって合成し、移動体が含まれない全天球映像を生成する。
In the omnidirectional video shooting system, the omnidirectional video and the unidirectional video are synchronized with the shooting time difference of the same scene according to the traveling speed of the moving
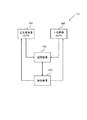
次に、本発明である全天球映像撮影システムについて説明する。全天球映像撮影システムは、全天球映像撮影装置100とコンピュータ等を組み合わせて全天球映像撮影方法を実現するための仕組みである。図2は、全天球映像撮影システムの構成を示すブロック図である。図2に示すように、全天球映像撮影システム110は、全天球映像カメラ200、一眼映像カメラ300、制御装置600、及び記憶装置700等を有する。
Next, the omnidirectional video imaging system according to the present invention will be described. The omnidirectional video imaging system is a mechanism for realizing an omnidirectional video imaging method by combining the omnidirectional
全天球映像カメラ200は、移動体500の上方から撮影した全方位映像を取得するための全天球映像撮影手段である。一眼映像カメラ300は、移動体500の後方において撮影した一方向映像を取得するための一眼映像撮影手段である。なお、全方位映像は、移動体500を含む映像であり、一方向映像は、全方位映像の視野の一部であって移動体500が含まれない視野の映像である。
The
制御装置600は、コンピュータのCPU(中央処理装置)等のプロセッサである。制御装置600は、全天球映像カメラ200、一眼映像カメラ300、及び記憶装置700等を制御する。具体的には、全天球映像カメラ200及び一眼映像カメラ300に指示して全方位映像及び一方向映像を取得し、記憶装置700に保存する。そして、記憶装置700に保存された全方位映像及び一方向映像を演算により合成して移動体500が含まれない全天球映像を生成し、記憶装置700に保存する。
The
記憶装置700は、半導体メモリ等の主記憶装置や、磁気ディスク等の補助記憶装置(リムーバブルディスク等の記録媒体を含む)等であり、全方位映像及び一方向映像を保存するための記憶手段である。主記憶装置は、主に制御装置600が演算等をする際に一時的にデータを記憶し、補助記憶装置は、主に保存のために長期的にデータを記憶する。なお、記憶装置700は、コンピュータネットワーク上のサーバ等が備える記憶手段であっても良い。
The
図3は、全天球映像撮影システム110の制御装置600と記憶装置700の関係を示すブロック図である。図3に示すように、制御装置600は、全方位映像保存部610、一方向映像保存部620、再生場面同期部630、同一映像範囲計算処理部640、映像遠近計算処理部650、及び全天球映像合成処理部660等を有する。
FIG. 3 is a block diagram showing the relationship between the
全方位映像保存部610は、全天球映像カメラ200に撮影の指示を出すとともに、全天球映像カメラ200で撮影された全方位映像710を取得して、記憶装置700に保存する。なお、全天球映像カメラ200に対して、撮影の位置や方向、ズームの倍率などの撮影条件を指示しても良い。また、全方位映像710に対して、撮影場所の緯度、経度などの地図情報や時間情報を付加しても良い。さらに、速度、加速度、進行方向などの情報を付加しても良い。
The omnidirectional
一方向映像保存部620は、一眼映像カメラ300に撮影の指示を出すとともに、一眼映像カメラ300で撮影された一方向映像720を取得して、記憶装置700に保存する。なお、一眼映像カメラ300に対して、撮影の位置や方向、ズームの倍率などの撮影条件を指示しても良い。また、一方向映像720に対して、撮影場所の緯度、経度などの地図情報や時間情報を付加しても良い。さらに、速度、加速度、進行方向などの情報を付加しても良い。
The one-way
再生場面同期部630は、記憶装置700に保存された全方位映像710と一方向映像720との移動体500の進行速度に伴う同一場面の撮影時間差を同期させる。同期させた全方位映像710aと一方向映像720aを記憶装置700に一時的に保存する。なお、移動体500の走行速度や走行方向について、移動体500やGPS(全地球測位システム)等から情報を取得しても良いし、全方位映像710等から自動的に算出しても良い。
The playback
同一映像範囲計算処理部640は、同期された全方位映像710aの撮影範囲うち、同期された一方向映像710aの撮影範囲と一致する部分を抽出する。範囲抽出した全方位映像710bと一方向映像720bを記憶装置700に一時的に保存する。
The same video range
映像遠近計算処理部650は、範囲抽出された全方位映像710bと一方向映像720bとの高度差に基づいて遠近を補正する。遠近補正した全方位映像710cと一方向映像720cを記憶装置700に一時的に保存する。
The video perspective
全天球映像合成処理部660は、遠近補正された全方位映像710cに一方向映像720cを合成し、移動体500が含まれない全天球映像730を生成する。生成した全天球映像730は、記憶装置700に保存する。
The omnidirectional video image
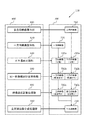
次に、本発明である全天球映像撮影プログラムについて説明する。全天球映像撮影システム110において、制御装置600は、記憶装置700に保存された全天球映像撮影プログラム120を読み込んで、処理を実行する。全天球映像撮影プログラム120は、全天球映像撮影方法について制御装置600に実行させる命令を記述したものである。図4は、全天球映像撮影プログラム120の処理の流れを示すフローチャートである。
Next, the omnidirectional video shooting program according to the present invention will be described. In the omnidirectional
図4に示すように、全天球映像撮影プログラム120は、移動体500の上方から撮影した移動体500を含む視野の全方位映像710を取得して記憶手段700に保存するステップ(全方位映像保存800)と、移動体500の後方において撮影した全方位映像710の視野の一部であって移動体500が含まれない視野の一方向映像720を取得して記憶手段700に保存するステップ(一方向映像保存810)と、保存された全方位映像710と保存された一方向映像720との移動体500の進行速度に伴う同一場面の撮影時間差を同期させるステップ(再生場面同期820)と、同期された全方位映像710aの撮影範囲うち同期された一方向映像720aの撮影範囲と一致する部分を抽出するステップ(撮影範囲抽出830)と、抽出された全方位映像710bと抽出された一方向映像720bとの高度差に基づいて遠近を補正するステップ(遠近補正840)と、補正された全方位映像710cに補正された一方向映像720cを合成し、移動体500が含まれない全天球映像730を生成するステップ(全天球映像合成850)と、を有する。
As shown in FIG. 4, the omnidirectional
なお、全方位映像保存800と一方向映像保存810については、同時並行にしているが、ステップの順序を問わず、さらに他に必要な情報の入力を行っても良い。再生場面同期820、撮影範囲抽出830、及び遠近補正840については、他に加工・編集に関するステップを加えても良い。全天球映像合成850については、後に出力・送信に関するステップを加えても良い。
The
図5は、全天球映像撮影方法の進行方向におけるカメラ配置のずれによる再生場面同期820について説明する図である。図5に示すように、全天球映像カメラ200が撮影した全方位映像710の再生コマ240と、一眼映像カメラ300が撮影した一方向映像720の再生コマ340とは、同一範囲が撮影された映像について撮影時間差821が生じる。
FIG. 5 is a diagram for explaining the
撮影時間差821は、移動体500が水平に直進している場合に、全天球映像カメラ200と一眼映像カメラ300との水平距離だけ移動したときに経過した時間である。撮影時間差821は、移動体500の走行速度に応じて変動するので、できるだけ走行速度を一定に維持するのが好ましい。なお、速度情報から撮影時間差821を自動調整しても良い。
The
同期の方法としては、全方位映像710と一方向映像720から、同一範囲が撮影された再生コマ240と再生コマ340を見つけてタイミングを合わせる。移動体500の走行速度から撮影時間差821を算出してタイミングを合わせても良いし、全方位映像710及び一方向映像720に目印となる情報(例えば、座標など)を持たせて、目印となる情報が一致する再生コマ240と再生コマ340を見つけるようにしても良い。
As a synchronization method, the
同じ撮影範囲の映像を有する全方位映像710の再生コマ240と一方向映像720の再生コマ340とを同期させ、全方位映像710a及び一方向映像720aを生成しても良いし、再生コマ240と再生コマ340の対応関係を示す情報として保持しても良い。
The
全方位映像710の各再生コマ240に対して、一方向映像720の何れかの再生コマ340を関連付けるが、対応する再生コマ340が存在しない場合は、前後の再生コマ340を利用する等して補完すれば良い。
Any
図6は、全天球映像撮影方法の全方位映像における一方向映像の撮影範囲を一致させる撮影範囲抽出830について説明する図である。なお、図6(a)は、移動体500が進行方向501に移動しているときに、全天球映像カメラ200の撮影範囲230と、一眼映像カメラ300の撮影範囲330を上方から見たもので、図6(b)は、撮影時間差821の分だけ移動体500が移動したものである。
FIG. 6 is a diagram for explaining the
図6(a)における全天球映像カメラ200の撮影範囲230には移動体500が映っているため、全方位映像(710a)から移動体500を除去するためには、移動体500の位置における移動体500が映っていない一方向映像(720a)が必要となる。
Since the moving
図6(b)における一眼映像カメラ300の撮影範囲330には移動体500が映っておらず、図6(a)において移動体500が存在していた位置を含むものであり、これを一致範囲831として抽出する。一致範囲831は、少なくとも除去したい移動体500等の位置が含まれる範囲となれば良い。
The moving
なお、一致範囲831における全方位映像(710b)及び一方向映像(720b)に撮影時間差821による余計な映り込みが生じた場合には、マスク処理などにより除去しても良い。
Note that in the case where an extra reflection due to the
図7は、全天球映像撮影方法の全方位映像と一方向映像の遠近補正840について説明する図である。なお、図7(a)は、移動体500が進行方向501に移動しているときに、全天球映像カメラ200の視野220と、一眼映像カメラ300の視野320を側方から見たもので、図7(b)は、撮影時間差821の分だけ移動体500が移動したものである。
FIG. 7 is a diagram for explaining the
全天球映像カメラ200と一眼映像カメラ300とは垂直距離だけ高度差841が存在するため、一致範囲831における全方位映像(710b)及び一方向映像(720b)には、遠近による歪みが生じる。
Since the
高度差841による画質等の補正は、一方向映像(720b)の画質等を調整して、全方位映像(710b)に合わせれば良い。また、全天球映像カメラ200と一眼映像カメラ300の撮影方向にズレがある場合には、角度などを補正すれば良い。さらに、地面510の傾斜や移動体500の振動は、ジンバル210、310で吸収して調整しているが、全天球映像カメラ200と一眼映像カメラ300にズレが生じた場合にも補正を行えば良い。
The image quality and the like can be corrected by the
補正された一方向映像(720c)を全方位映像(710c)に合成することにより、疑似的に移動体500が除去された全天球映像730が生成される。例えば、マスク処理を施すなどして、全方位映像(710c)と一方向映像(720c)との違う部分、すなわち移動体500などの不要な部分を抽出し、全方位映像(710c)における当該部分を一方向映像(720c)に置き換えることにより、全天球映像730を生成する。
By synthesizing the corrected one-directional image (720c) with the omnidirectional image (710c), an
全天球映像730は、地図座標と関連付ければ、その座標においてパノラマ状に映像を再生することが可能となる。また、経路探索を組み合わせれば、経路に従って映像を再生することも可能となる。
If the
このように、撮影車や操作者等の移動体500が映らない全天球映像730を生成することができる。現在の通信環境に合わせた高画質画面や拡大再生画面等にして、OSやインターネット利用モバイル機器など機種に左右されずに稼動させることが可能であり、街路(道路)の走行や商店街、店舗の売場、観光施設、公園、アミューズメント施設等に利用することができる。また、防災システムとしても活用が可能である。
In this way, it is possible to generate the
例えば、店舗・農産物直売所・ショッピングセンターのインターネット回遊サービス、商店街、公園、遊園地、テーマパーク、農場や観光農園、寺社・史跡等の案内サービス、津波避難シミュレーション、災害時における避難訓練や避難誘導、現場把握等の防災システム、全天球静止画コンテンツ提供サービスなどを提供することができる。このように、地域産業の活性化、地域観光案内、自立的な農業経営など創生政策に活用でき、地域の安全・安心対策にも貢献することができる。 For example, online shopping services for stores, agricultural direct sales offices, and shopping centers, shopping streets, parks, amusement parks, theme parks, farms and tourist farms, information services for temples and historical sites, tsunami evacuation simulation, evacuation drills and evacuation in times of disaster Disaster prevention systems such as guidance and on-site grasping, omnidirectional still image content providing services, etc. can be provided. In this way, it can be used for revitalization policies such as revitalization of local industries, regional tourism guidance, and independent farming management, and can also contribute to regional safety and security measures.
以上、本発明の実施例を述べたが、これらに限定されるものではない。例えば、全天球映像730は、予め取得した全方位映像710と一方向映像720とを合成した後に提供されるが、全天球映像撮影カメラ200及び一眼映像撮影カメラ300で撮影しながら全天球映像730の合成も行い、できるだけ遅延時間を短くすることにより、リアルタイムに提供できるようにしても良い。
As mentioned above, although the Example of this invention was described, it is not limited to these. For example, the
100:全天球映像撮影装置
110:全天球映像撮影システム
120:全天球映像撮影プログラム
200:全天球映像カメラ
210:ジンバル
220:視野
230:撮影範囲
231:基点
240:再生コマ
300:一眼映像カメラ
310:ジンバル
320:視野
330:撮影範囲
340:再生コマ
400:カメラ架台
410:支柱
420:縦部材
430:横部材
500:移動体
501:進行方向
510:地面
600:制御装置
610:全方位映像保存部
620:一方向映像保存部
630:再生場面同期部
640:同一映像範囲計算処理部
650:映像遠近計算処理部
660:全天球映像合成処理部
700:記憶装置
710、710a、710b、710c:全方位映像
720、720a、720b、720c:一方向映像
730:全天球映像
800:全方位映像保存
810:一方向映像保存
820:再生場面同期
821:撮影時間差
830:撮影範囲抽出
831:一致範囲
840:遠近補正
841:高度差
850:全天球映像合成
DESCRIPTION OF SYMBOLS 100: Spherical video imaging device 110: Spherical video imaging system 120: Spherical video imaging program 200: Spherical video camera 210: Gimbal 220: Field of view 230: Shooting range 231: Base point 240: Playback frame 300: Single-lens video camera 310: Gimbal 320: Field of view 330: Shooting range 340: Playback frame 400: Camera mount 410: Support column 420: Vertical member 430: Horizontal member 500: Moving body 501: Traveling direction 510: Ground 600: Control device 610: All Direction video storage unit 620: One-way video storage unit 630: Playback scene synchronization unit 640: Same video range calculation processing unit 650: Video perspective calculation processing unit 660: Spherical video synthesis processing unit 700:
Claims (8)
一方向の映像を撮影する一眼映像カメラと、
前記全天球映像カメラ及び前記一眼映像カメラを搭載するためのカメラ架台と、を備え、
前記カメラ架台は、垂立する支柱から上方に延びる縦部材と、前記支柱から後方に延びる横部材と、を有し、
前記全天球映像カメラは、前記縦部材に設置され、前記カメラ架台を設置した移動体を含む視野の全方位映像を撮影し、
前記一眼映像カメラは、前記横部材に設置され、前記全方位映像の視野の一部であって前記移動体が含まれない視野の一方向映像を撮影し、
前記全天球映像カメラで撮影した全方位映像に、前記一眼映像カメラで撮影した一方向映像が合成されて、前記移動体が含まれない全天球映像が生成される、
ことを特徴とする全天球映像撮影装置。 A compound-eye omnidirectional video camera capable of shooting omnidirectional images,
A single-lens video camera that captures unidirectional video,
A camera mount for mounting the omnidirectional video camera and the single-lens video camera;
The camera mount has a vertical member that extends upward from a support column that suspends, and a horizontal member that extends rearward from the support column,
The omnidirectional video camera is installed on the vertical member and shoots an omnidirectional video of a field of view including a moving body on which the camera mount is installed,
The single-lens video camera is installed on the transverse member and shoots a unidirectional image of a field of view that is part of the field of view of the omnidirectional image and does not include the moving body,
The omnidirectional video shot by the single-lens video camera is combined with the omnidirectional video shot by the omnidirectional video camera to generate a omnidirectional video that does not include the moving object.
An omnidirectional video imaging device.
ことを特徴とする請求項1に記載の全天球映像撮影装置。 The omnidirectional video camera and the single-lens video camera are mounted on the camera mount via a gimbal that prevents vibrations.
The omnidirectional video imaging device according to claim 1.
ことを特徴とする請求項1又は2に記載の全天球映像撮影装置。 As for the omnidirectional video, the shooting time difference of the same scene according to the traveling speed of the moving object is synchronized between the omnidirectional video and the unidirectional video, and the range where the shooting ranges match is extracted, based on the altitude difference Is synthesized by correcting the perspective,
The omnidirectional video imaging device according to claim 1 or 2, characterized in that
前記移動体の後方において撮影した一方向の映像を取得するための一眼映像撮影手段と、
前記全天球映像撮影手段から取得した前記移動体を含む視野の全方位映像、及び前記一眼映像撮影手段から取得した前記全方位映像の視野の一部であって前記移動体が含まれない視野の一方向映像を記憶するための記憶手段と、を有し、
コンピュータが、前記記憶手段に記憶された全方位映像に、前記記憶手段に記憶された一方向映像を合成することにより、前記移動体が含まれない全天球映像を生成する、
ことを特徴とする全天球映像撮影システム。 Omnidirectional video imaging means for acquiring an omnidirectional video imaged from above the moving body;
A single-lens image capturing means for acquiring a one-way image captured behind the moving body;
An omnidirectional image of the visual field including the moving object acquired from the omnidirectional video image capturing unit and a visual field that is a part of the visual field of the omnidirectional image acquired from the single-lens video image capturing unit and does not include the moving object. Storage means for storing a unidirectional video,
The computer generates an omnidirectional video that does not include the moving body by combining the unidirectional video stored in the storage with the omnidirectional video stored in the storage.
An omnidirectional video shooting system.
ことを特徴とする請求項4に記載の全天球映像撮影システム。 The storage means is a storage device on a computer network;
The omnidirectional video imaging system according to claim 4.
前記移動体の後方において撮影した前記全方位映像の視野の一部であって前記移動体が含まれない視野の一方向映像を取得して記憶手段に保存する一方向映像保存ステップと、
保存された前記全方位映像と保存された前記一方向映像との前記移動体の進行速度に伴う同一場面の撮影時間差を同期させる再生場面同期ステップと、
同期された前記全方位映像の撮影範囲うち同期された前記一方向映像の撮影範囲と一致する部分を抽出する撮影範囲抽出ステップと、
抽出された前記全方位映像と抽出された前記一方向映像との高度差に基づいて遠近を補正する遠近補正ステップと、
補正された前記全方位映像に補正された前記一方向映像を合成し、前記移動体が含まれない全天球映像を生成する全天球映像合成ステップと、を有する、
ことを特徴とする全天球映像撮影プログラム。 An omnidirectional video storage step of acquiring an omnidirectional video of a field of view including the moving body photographed from above the mobile body and storing it in a storage means;
A unidirectional image storage step of acquiring a unidirectional image of a field of view that is a part of the field of view of the omnidirectional image captured behind the moving body and does not include the moving body, and storing it in a storage unit;
A reproduction scene synchronization step of synchronizing a shooting time difference of the same scene according to a traveling speed of the moving body between the stored omnidirectional video and the stored unidirectional video;
A shooting range extracting step of extracting a portion that matches the synchronized shooting range of the one-way video out of the synchronized shooting range of the omnidirectional video;
A perspective correction step for correcting perspective based on an altitude difference between the extracted omnidirectional video and the extracted unidirectional video;
Combining the corrected unidirectional image with the corrected omnidirectional image and generating an omnidirectional image not including the moving object, and an omnidirectional image combining step.
An omnidirectional video shooting program.
前記移動体の後方において撮影した前記全方位映像の視野の一部であって前記移動体が含まれない視野の一方向映像を取得し、
取得された前記全方位映像と取得された前記一方向映像との前記移動体の進行速度に伴う同一場面の撮影時間差を同期させ、
同期された前記全方位映像の撮影範囲うち同期された前記一方向映像の撮影範囲と一致する部分を抽出し、
抽出された前記全方位映像と抽出された前記一方向映像との高度差に基づいて遠近を補正し、
補正された前記全方位映像に補正された前記一方向映像を合成し、前記移動体が含まれない全天球映像を生成する、
ことを特徴とする全天球映像撮影方法。 Obtain an omnidirectional image of the field of view including the moving body taken from above the moving body,
Obtaining a unidirectional image of a field of view that is part of the field of view of the omnidirectional image taken behind the moving object and does not include the moving object;
Synchronize the shooting time difference of the same scene with the traveling speed of the moving body between the acquired omnidirectional video and the acquired unidirectional video,
Extracting a portion of the synchronized shooting range of the omnidirectional video that matches the synchronized shooting range of the unidirectional video,
Correct perspective based on the altitude difference between the extracted omnidirectional video and the extracted unidirectional video,
Combining the corrected unidirectional image with the corrected omnidirectional image to generate an omnidirectional image that does not include the moving object;
A spherical image capturing method characterized by the above.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016124164A JP6351663B2 (en) | 2016-06-23 | 2016-06-23 | Spherical video imaging device, global sphere video imaging system, omnidirectional video imaging program, recording medium recording the same, and omnidirectional video imaging method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016124164A JP6351663B2 (en) | 2016-06-23 | 2016-06-23 | Spherical video imaging device, global sphere video imaging system, omnidirectional video imaging program, recording medium recording the same, and omnidirectional video imaging method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017228956A JP2017228956A (en) | 2017-12-28 |
| JP6351663B2 true JP6351663B2 (en) | 2018-07-04 |
Family
ID=60892197
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016124164A Active JP6351663B2 (en) | 2016-06-23 | 2016-06-23 | Spherical video imaging device, global sphere video imaging system, omnidirectional video imaging program, recording medium recording the same, and omnidirectional video imaging method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6351663B2 (en) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10232446A (en) * | 1997-02-19 | 1998-09-02 | Biinoi:Kk | Camera supporting device |
| JP2006191524A (en) * | 2004-12-09 | 2006-07-20 | Nikon Corp | Automatic framing device and photographing device |
| US7667730B2 (en) * | 2005-06-15 | 2010-02-23 | Mitsubishi Electric Research Laboratories, Inc. | Composite surveillance camera system |
| JP4980617B2 (en) * | 2005-08-26 | 2012-07-18 | 株式会社岩根研究所 | 2D drawing and video composition display device |
| JP5230013B2 (en) * | 2009-07-13 | 2013-07-10 | シャープ株式会社 | Imaging device |
| JP3185364U (en) * | 2013-05-20 | 2013-08-15 | 竜崎 孝雄 | Camera stand |
| US9406114B2 (en) * | 2014-02-18 | 2016-08-02 | Empire Technology Development Llc | Composite image generation to remove obscuring objects |
-
2016
- 2016-06-23 JP JP2016124164A patent/JP6351663B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017228956A (en) | 2017-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7307259B2 (en) | Three-dimensional information processing method and three-dimensional information processing apparatus | |
| JP7223978B2 (en) | Calibration device and calibration method | |
| CN107534789B (en) | Image synchronization device and image synchronization method | |
| US20110211040A1 (en) | System and method for creating interactive panoramic walk-through applications | |
| WO2018103408A1 (en) | Aerial image capturing method and system for unmanned aerial vehicle to survey traffic accident scene | |
| US20200045239A1 (en) | Control device of movable type imaging device, control method of movable type imaging device, and program | |
| JP2020086983A (en) | Image processing device, image processing method, and program | |
| WO2017134706A1 (en) | Video display method and video display device | |
| JP2017139725A (en) | Video display method and video display device | |
| CN104079802B (en) | Aviation or the shadow removal method and apparatus of satellite photo | |
| CN108600607A (en) | A kind of fire-fighting panoramic information methods of exhibiting based on unmanned plane | |
| JP6616967B2 (en) | Map creation apparatus and map creation method | |
| JP2019114147A (en) | Image processing apparatus, control method for image processing apparatus, and program | |
| JP2020042407A (en) | Information processor and information processing method and program | |
| CN104767975A (en) | Method for achieving interactive panoramic video stream map | |
| CN102831816B (en) | Device for providing real-time scene graph | |
| CN107590854A (en) | Reservoir region three-dimensional live methods of exhibiting based on WEBGIS | |
| US6731825B1 (en) | Apparatus and method for producing images using digitally stored dynamic background sets | |
| KR100926231B1 (en) | 360-degree video image-based spatial information construction system and its construction method | |
| CN106454119A (en) | Watermark picture generating method and mobile terminal with watermark camera | |
| KR101149756B1 (en) | The system for collecting road and traffic data using a moving camera on road network | |
| KR20090001494A (en) | Digital Photo Mapping System and Its Service Method | |
| JP6351663B2 (en) | Spherical video imaging device, global sphere video imaging system, omnidirectional video imaging program, recording medium recording the same, and omnidirectional video imaging method | |
| KR101484314B1 (en) | System and method for building video-based spatial information | |
| KR101857104B1 (en) | Contents service system for pictures of playing space |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180522 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180605 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6351663 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |