JP6316744B2 - 埋め込み3dモデリング - Google Patents
埋め込み3dモデリング Download PDFInfo
- Publication number
- JP6316744B2 JP6316744B2 JP2014504422A JP2014504422A JP6316744B2 JP 6316744 B2 JP6316744 B2 JP 6316744B2 JP 2014504422 A JP2014504422 A JP 2014504422A JP 2014504422 A JP2014504422 A JP 2014504422A JP 6316744 B2 JP6316744 B2 JP 6316744B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- data
- model
- dimensional
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 claims description 53
- 238000000034 method Methods 0.000 claims description 45
- 238000004590 computer program Methods 0.000 claims description 15
- 238000002059 diagnostic imaging Methods 0.000 claims description 12
- 238000003384 imaging method Methods 0.000 claims description 12
- 230000009466 transformation Effects 0.000 claims description 11
- 238000005259 measurement Methods 0.000 claims description 7
- 210000000709 aorta Anatomy 0.000 description 12
- 230000011218 segmentation Effects 0.000 description 11
- 238000002591 computed tomography Methods 0.000 description 6
- 230000002792 vascular Effects 0.000 description 5
- 206010002329 Aneurysm Diseases 0.000 description 4
- 238000013152 interventional procedure Methods 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 238000001356 surgical procedure Methods 0.000 description 4
- 210000004204 blood vessel Anatomy 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 210000003090 iliac artery Anatomy 0.000 description 3
- 238000002513 implantation Methods 0.000 description 3
- 230000008439 repair process Effects 0.000 description 3
- 208000002223 abdominal aortic aneurysm Diseases 0.000 description 2
- 210000003484 anatomy Anatomy 0.000 description 2
- 208000007474 aortic aneurysm Diseases 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 210000004197 pelvis Anatomy 0.000 description 2
- 238000000844 transformation Methods 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 210000005166 vasculature Anatomy 0.000 description 2
- 230000003936 working memory Effects 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 210000001105 femoral artery Anatomy 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 210000003709 heart valve Anatomy 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 238000009607 mammography Methods 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 210000002254 renal artery Anatomy 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000002195 synergetic effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/12—Arrangements for detecting or locating foreign bodies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/486—Diagnostic techniques involving generating temporal series of image data
- A61B6/487—Diagnostic techniques involving generating temporal series of image data involving fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5211—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data
- A61B6/5229—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image
- A61B6/5235—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image combining images from the same or different ionising radiation imaging techniques, e.g. PET and CT
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/20—Editing of 3D images, e.g. changing shapes or colours, aligning objects or positioning parts
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/75—Determining position or orientation of objects or cameras using feature-based methods involving models
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/367—Correlation of different images or relation of image positions in respect to the body creating a 3D dataset from 2D images using position information
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10116—X-ray image
- G06T2207/10121—Fluoroscopy
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30021—Catheter; Guide wire
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30101—Blood vessel; Artery; Vein; Vascular
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2210/00—Indexing scheme for image generation or computer graphics
- G06T2210/41—Medical
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2219/00—Indexing scheme for manipulating 3D models or images for computer graphics
- G06T2219/20—Indexing scheme for editing of 3D models
- G06T2219/2004—Aligning objects, relative positioning of parts
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Animal Behavior & Ethology (AREA)
- High Energy & Nuclear Physics (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Architecture (AREA)
- Computer Graphics (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description
a)対象の関心領域の3Dデータを提供するステップ、
b)関心領域の少なくとも一部の画像データを提供するステップ、装置は少なくとも部分的に関心領域内に位置する、
c)画像データから装置の3Dモデルを生成するステップ、
d)3Dデータ内に3Dモデルを埋め込むことによってモデル更新3D画像のためのデータを提供するステップ。
入力ユニットから処理ユニットへ対象の関心領域の3Dデータを提供するステップ、
入力ユニットから処理ユニットへ関心領域の少なくとも一部の画像データを提供するステップ、装置は少なくとも部分的に関心領域内に配置される、
処理ユニットによって画像データから装置の3Dモデルを生成するステップ、
出力ユニットを介してモデル更新3D画像を提供するために処理ユニットによって3Dデータ内に3Dモデルを埋め込むステップ。
Claims (15)
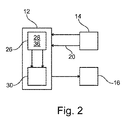
- ガイダンスサポートのための画像処理装置であって、
処理ユニットと、
入力ユニットと、
出力ユニットとを有し、
前記入力ユニットは対象の関心領域の術前三次元データを提供し、前記関心領域の少なくとも一部の術中画像データを提供し、装置は少なくとも部分的に前記関心領域内に配置され、前記装置はステントであり、
前記処理ユニットは前記ステントのために提供される形状仮定によって前記術中画像データから前記装置の三次元モデルを生成する生成ユニットを有し、
前記処理ユニットは前記三次元モデルを前記術前三次元データ内に埋め込む埋め込みユニットを有し、
前記出力ユニットは前記埋め込まれた三次元モデルを伴うモデル更新三次元画像を提供する、
画像処理装置。 - 前記術中画像データが少なくとも一つの二次元画像を有し、前記生成ユニットが前記少なくとも一つの二次元画像から前記三次元モデルを生成し、
前記生成ユニットが前記術前三次元データから前記関心領域の三次元表現を生成し、
前記埋め込みユニットが前記三次元モデルを前記三次元表現内に埋め込む、
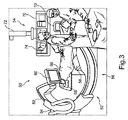
請求項1に記載の画像処理装置。 - ガイダンスサポートを提供するための医用イメージングシステムであって、
画像収集装置と、
請求項1又は2に記載の画像処理装置と、
表示ユニットとを有し、
前記画像収集装置が前記術中画像データを収集し、当該データを前記処理ユニットへ提供し、
前記出力ユニットが前記モデル更新三次元画像を前記表示ユニットへ提供し、
前記表示ユニットが前記モデル更新三次元画像を表示する、
医用イメージングシステム。 - 前記画像収集装置がX線源とX線検出器を持つX線イメージング装置であり、
前記X線イメージング装置が二次元X線画像を術中画像データとして提供する、
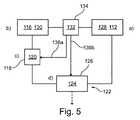
請求項3に記載の医用イメージングシステム。 - ガイダンスサポートのための画像処理装置の作動方法であって、前記画像処理装置は処理ユニット、入力ユニット、及び出力ユニットを有し、前記処理ユニットは生成ユニット及び埋め込みユニットを有し、
a)前記処理ユニットが、対象の関心領域の術前三次元データを提供するステップと、
b)前記処理ユニットが、前記関心領域の少なくとも一部の術中画像データを提供するステップであって、装置は少なくとも部分的に前記関心領域内に位置し、前記装置がステントである、ステップと、
c)前記生成ユニットが、前記ステントのために提供される形状仮定によって前記術中画像データから前記装置の三次元モデルを生成するステップと、
d)前記埋め込みユニットが、前記三次元モデルを前記術前三次元データ内に埋め込むことによってモデル更新三次元画像のためのデータを提供するステップと
を有する方法。 - ステップa)における前記術前三次元データが第1の基準座標系を有し、ステップb)における前記術中画像データが第2の基準座標系を有し、
ステップd)における埋め込みのために、前記第1の基準座標系と前記第2の基準座標系の間の変換が決定され、
前記変換が前記三次元モデルへ適用される、
請求項5に記載の方法。 - 前記術中画像データが少なくとも一つの二次元画像を有する、請求項5又は6に記載の方法。
- 前記関心領域の三次元表現が前記術前三次元データから生成され、ステップd)において、前記三次元モデルが前記三次元表現内に埋め込まれる、請求項5乃至7のいずれか一項に記載の方法。
- ステップd)のために、前記三次元モデルと前記術前三次元データの間の予測される空間関係が予め決定され、埋め込みのために、前記三次元モデルがそれに従って調節される、請求項5乃至8のいずれか一項に記載の方法。
- ステップd)に続いて、前記関心領域の前記三次元表現内で前記モデル更新三次元画像がユーザへ表示されるステップe)が提供される、請求項8又は9に記載の方法。
- 前記装置及び/又は対象の所定の特徴が前記モデル更新三次元画像において検出され、前記所定の特徴が前記モデル更新三次元画像において強調される、請求項5乃至10のいずれか一項に記載の方法。
- 前記装置及び/又は対象の所定の特徴が前記モデル更新三次元画像において検出され、
前記対象に関連する前記特徴の測定データが決定され、
インターベンションの操作若しくはガイドの方策を定義する及び/又は適応させるために前記測定データが提供される、
請求項5乃至11のいずれか一項に記載の方法。 - ガイダンスサポートのための画像処理装置の作動方法であって、
入力ユニットから処理ユニットへ対象の関心領域の術前三次元データを提供するステップと、
前記入力ユニットから前記処理ユニットへ前記関心領域の少なくとも一部の術中画像データを提供するステップであって、装置は少なくとも部分的に前記関心領域内に配置され、前記装置がステントである、ステップと、
前記処理ユニットによって、前記ステントのために提供される形状仮定によって前記術中画像データから前記装置の三次元モデルを生成するステップと、
出力ユニットを介してモデル更新三次元画像を提供するために前記処理ユニットによって前記術前三次元データ内に前記三次元モデルを埋め込むステップと
を有する方法。 - 処理ユニットによって実行されるときに、請求項5乃至13のいずれか一項に記載の方法ステップを実行するように構成される、請求項1乃至4のいずれか一項に記載の装置を制御するためのコンピュータプログラム要素。
- 請求項14に記載のプログラム要素を記憶したコンピュータ可読媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP11305428 | 2011-04-12 | ||
| EP11305428.2 | 2011-04-12 | ||
| PCT/IB2012/051700 WO2012140553A1 (en) | 2011-04-12 | 2012-04-05 | Embedded 3d modelling |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014514082A JP2014514082A (ja) | 2014-06-19 |
| JP2014514082A5 JP2014514082A5 (ja) | 2015-05-21 |
| JP6316744B2 true JP6316744B2 (ja) | 2018-04-25 |
Family
ID=46025819
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014504422A Active JP6316744B2 (ja) | 2011-04-12 | 2012-04-05 | 埋め込み3dモデリング |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20140031676A1 (ja) |
| EP (1) | EP2697772A1 (ja) |
| JP (1) | JP6316744B2 (ja) |
| CN (1) | CN103460246B (ja) |
| BR (1) | BR112013026014A2 (ja) |
| RU (1) | RU2013150250A (ja) |
| WO (1) | WO2012140553A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3091931B8 (en) * | 2014-01-06 | 2020-04-01 | Koninklijke Philips N.V. | Deployment modelling |
| US9757245B2 (en) * | 2014-04-24 | 2017-09-12 | DePuy Synthes Products, Inc. | Patient-specific spinal fusion cage and methods of making same |
| US10430445B2 (en) * | 2014-09-12 | 2019-10-01 | Nuance Communications, Inc. | Text indexing and passage retrieval |
| CN107205785B (zh) | 2015-01-22 | 2021-07-27 | 皇家飞利浦有限公司 | 利用光学形状感测的腔内移植物可视化 |
| US10105117B2 (en) * | 2015-02-13 | 2018-10-23 | Biosense Webster (Israel) Ltd. | Compensation for heart movement using coronary sinus catheter images |
| US10307078B2 (en) | 2015-02-13 | 2019-06-04 | Biosense Webster (Israel) Ltd | Training of impedance based location system using registered catheter images |
| KR20170033722A (ko) * | 2015-09-17 | 2017-03-27 | 삼성전자주식회사 | 사용자의 발화 처리 장치 및 방법과, 음성 대화 관리 장치 |
| EP3456243A1 (en) * | 2017-09-14 | 2019-03-20 | Koninklijke Philips N.V. | Improved vessel geometry and additional boundary conditions for hemodynamic ffr/ifr simulations from intravascular imaging |
| US11515031B2 (en) | 2018-04-16 | 2022-11-29 | Canon Medical Systems Corporation | Image processing apparatus, X-ray diagnostic apparatus, and image processing method |
| EP3586748B1 (de) * | 2018-06-26 | 2020-06-24 | Siemens Healthcare GmbH | Verfahren zum betreiben eines medizinischen bildgebungsgeräts sowie bildgebungsgerät |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3667813B2 (ja) * | 1995-04-18 | 2005-07-06 | 株式会社東芝 | X線診断装置 |
| US6409755B1 (en) * | 1997-05-29 | 2002-06-25 | Scimed Life Systems, Inc. | Balloon expandable stent with a self-expanding portion |
| JP4405002B2 (ja) * | 1999-09-10 | 2010-01-27 | 阿部 慎一 | ステントグラフト設計装置 |
| US6351513B1 (en) * | 2000-06-30 | 2002-02-26 | Siemens Corporate Research, Inc. | Fluoroscopy based 3-D neural navigation based on co-registration of other modalities with 3-D angiography reconstruction data |
| US7840393B1 (en) * | 2000-10-04 | 2010-11-23 | Trivascular, Inc. | Virtual prototyping and testing for medical device development |
| US6782284B1 (en) * | 2001-11-21 | 2004-08-24 | Koninklijke Philips Electronics, N.V. | Method and apparatus for semi-automatic aneurysm measurement and stent planning using volume image data |
| JP2003245360A (ja) * | 2002-02-26 | 2003-09-02 | Piolax Medical Device:Kk | ステント設計支援装置、ステント設計支援方法、ステント設計支援プログラム、及びステント設計支援プログラムを記録した記録媒体 |
| FR2845185B1 (fr) * | 2002-09-27 | 2004-11-26 | Ge Med Sys Global Tech Co Llc | Procede et systeme de traitement d'une image, programme d'ordinateur et dispositif de radiologie associe |
| US7991453B2 (en) * | 2002-11-13 | 2011-08-02 | Koninklijke Philips Electronics N.V | Medical viewing system and method for detecting boundary structures |
| US7697972B2 (en) * | 2002-11-19 | 2010-04-13 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| WO2004066803A2 (en) * | 2003-01-31 | 2004-08-12 | Koninklijke Philips Electronics N.V. | Magnetic resonance compatible stent |
| US20040215338A1 (en) * | 2003-04-24 | 2004-10-28 | Jeff Elkins | Method and system for drug delivery to abdominal aortic or thoracic aortic aneurysms |
| JP4467522B2 (ja) * | 2003-08-05 | 2010-05-26 | 株式会社日立メディコ | 断層像構成装置及び方法 |
| JP2008504055A (ja) * | 2004-06-28 | 2008-02-14 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 特にインプラントの画像のための画像処理システム |
| US20080212883A1 (en) * | 2005-08-17 | 2008-09-04 | Pixoneer Geomatics, Inc. | Processing Method of Data Structure for Real-Time Image Processing |
| US20080273777A1 (en) * | 2005-10-21 | 2008-11-06 | Vincent Luboz | Methods And Apparatus For Segmentation And Reconstruction For Endovascular And Endoluminal Anatomical Structures |
| WO2007113705A1 (en) * | 2006-04-03 | 2007-10-11 | Koninklijke Philips Electronics N. V. | Determining tissue surrounding an object being inserted into a patient |
| US20100292771A1 (en) * | 2009-05-18 | 2010-11-18 | Syncardia Systems, Inc | Endovascular stent graft system and guide system |
| WO2008001264A2 (en) | 2006-06-28 | 2008-01-03 | Koninklijke Philips Electronics N. V. | Spatially varying 2d image processing based on 3d image data |
| US8165360B2 (en) * | 2006-12-06 | 2012-04-24 | Siemens Medical Solutions Usa, Inc. | X-ray identification of interventional tools |
-
2012
- 2012-04-05 US US14/110,970 patent/US20140031676A1/en not_active Abandoned
- 2012-04-05 RU RU2013150250/08A patent/RU2013150250A/ru unknown
- 2012-04-05 WO PCT/IB2012/051700 patent/WO2012140553A1/en active Application Filing
- 2012-04-05 BR BR112013026014A patent/BR112013026014A2/pt not_active IP Right Cessation
- 2012-04-05 EP EP12718379.6A patent/EP2697772A1/en not_active Ceased
- 2012-04-05 CN CN201280017926.0A patent/CN103460246B/zh not_active Expired - Fee Related
- 2012-04-05 JP JP2014504422A patent/JP6316744B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20140031676A1 (en) | 2014-01-30 |
| WO2012140553A1 (en) | 2012-10-18 |
| BR112013026014A2 (pt) | 2016-12-20 |
| CN103460246A (zh) | 2013-12-18 |
| CN103460246B (zh) | 2018-06-08 |
| EP2697772A1 (en) | 2014-02-19 |
| RU2013150250A (ru) | 2015-05-20 |
| JP2014514082A (ja) | 2014-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6316744B2 (ja) | 埋め込み3dモデリング | |
| JP6092124B2 (ja) | 血管介入手順において介入装置の正確な位置決めを支援する画像描写を提供する医用撮像装置 | |
| US10959780B2 (en) | Method and system for helping to guide an endovascular tool in vascular structures | |
| CN105816190B (zh) | X射线记录系统 | |
| RU2526567C2 (ru) | Автоматическое создание ориентиров для замены сердечного клапана | |
| CN107174263B (zh) | 用于采集和处理检查对象的图像数据的方法 | |
| JP5647251B2 (ja) | 血管インターベンション手術のための正確な位置決め | |
| US10682112B2 (en) | Suppression of independent movements in a series of 2D X-ray fluoroscopy images using a 3D pre-operative volume | |
| CN105520716B (zh) | 荧光镜图像的实时模拟 | |
| US11857354B2 (en) | Angiographic examination method for a vascular system | |
| JP2013532507A (ja) | 3d起源の心臓ロードマップ生成 | |
| JP6828083B2 (ja) | 自動的な動き検出 | |
| CN110891513A (zh) | 辅助引导血管内器械的方法和系统 | |
| US9875531B2 (en) | Bone suppression in X-ray imaging | |
| CN106456080B (zh) | 用于修改x射线数据中的对tee探头的成像的设备 | |
| WO2011121516A2 (en) | Virtual stent deployment | |
| KR101703564B1 (ko) | 혈관 정보를 포함하는 의료 영상을 디스플레이하는 장치 및 방법 | |
| US10779889B2 (en) | Planning support during an interventional procedure | |
| JP5847163B2 (ja) | 関心対象の角度付きビューを生成する医用表示システム及び方法 | |
| CN111317566A (zh) | 用于介入式手术的规划支持 | |
| JP5950902B2 (ja) | 生体構造の一部分を自動的に判定する装置及び方法、画像処理システム並びにコンピュータプログラム | |
| Breininger et al. | 3D-reconstruction of stiff wires from a single monoplane X-ray image | |
| Haigron et al. | Angiovision: aortic stent-graft placement by augmented angionavigation | |
| JP2023549954A (ja) | 医用撮像の際に患者の位置を調整するための誘導 | |
| WO2024049952A1 (en) | Intraoperative ultrasound coregistered to preoperative imaging technique for aiding navigation of instruments during endovascular procedures |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150401 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150401 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160204 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160506 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160801 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170124 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170928 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180301 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180328 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6316744 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |