JP6243522B2 - 正則化された検出再構成を使用するマルチエコーディクソン水−脂肪分離及びb0歪補正による並列mri - Google Patents
正則化された検出再構成を使用するマルチエコーディクソン水−脂肪分離及びb0歪補正による並列mri Download PDFInfo
- Publication number
- JP6243522B2 JP6243522B2 JP2016517592A JP2016517592A JP6243522B2 JP 6243522 B2 JP6243522 B2 JP 6243522B2 JP 2016517592 A JP2016517592 A JP 2016517592A JP 2016517592 A JP2016517592 A JP 2016517592A JP 6243522 B2 JP6243522 B2 JP 6243522B2
- Authority
- JP
- Japan
- Prior art keywords
- map
- fat
- water
- sensitivity
- signal data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- RGCLLPNLLBQHPF-HJWRWDBZSA-N phosphamidon Chemical compound CCN(CC)C(=O)C(\Cl)=C(/C)OP(=O)(OC)OC RGCLLPNLLBQHPF-HJWRWDBZSA-N 0.000 title claims description 47
- 238000012937 correction Methods 0.000 title claims description 7
- 238000001514 detection method Methods 0.000 title description 3
- 238000000926 separation method Methods 0.000 title description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 82
- 230000035945 sensitivity Effects 0.000 claims description 78
- 238000003384 imaging method Methods 0.000 claims description 53
- 238000000034 method Methods 0.000 claims description 39
- 238000005070 sampling Methods 0.000 claims description 9
- 238000004590 computer program Methods 0.000 claims description 6
- 230000009466 transformation Effects 0.000 claims description 3
- 239000003925 fat Substances 0.000 claims 25
- 238000004364 calculation method Methods 0.000 claims 3
- 230000003750 conditioning effect Effects 0.000 description 11
- 230000005415 magnetization Effects 0.000 description 11
- 210000003484 anatomy Anatomy 0.000 description 9
- 230000001629 suppression Effects 0.000 description 7
- 210000000577 adipose tissue Anatomy 0.000 description 4
- 238000013480 data collection Methods 0.000 description 4
- 230000005284 excitation Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 239000011159 matrix material Substances 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000001727 in vivo Methods 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 238000005481 NMR spectroscopy Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 210000001061 forehead Anatomy 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000005865 ionizing radiation Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000002610 neuroimaging Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 238000000264 spin echo pulse sequence Methods 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/5608—Data processing and visualization specially adapted for MR, e.g. for feature analysis and pattern recognition on the basis of measured MR data, segmentation of measured MR data, edge contour detection on the basis of measured MR data, for enhancing measured MR data in terms of signal-to-noise ratio by means of noise filtering or apodization, for enhancing measured MR data in terms of resolution by means for deblurring, windowing, zero filling, or generation of gray-scaled images, colour-coded images or images displaying vectors instead of pixels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/24—Arrangements or instruments for measuring magnetic variables involving magnetic resonance for measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/243—Spatial mapping of the polarizing magnetic field
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/4828—Resolving the MR signals of different chemical species, e.g. water-fat imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/5607—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution by reducing the NMR signal of a particular spin species, e.g. of a chemical species for fat suppression, or of a moving spin species for black-blood imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/561—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution by reduction of the scanning time, i.e. fast acquiring systems, e.g. using echo-planar pulse sequences
- G01R33/5611—Parallel magnetic resonance imaging, e.g. sensitivity encoding [SENSE], simultaneous acquisition of spatial harmonics [SMASH], unaliasing by Fourier encoding of the overlaps using the temporal dimension [UNFOLD], k-t-broad-use linear acquisition speed-up technique [k-t-BLAST], k-t-SENSE
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/561—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution by reduction of the scanning time, i.e. fast acquiring systems, e.g. using echo-planar pulse sequences
- G01R33/5615—Echo train techniques involving acquiring plural, differently encoded, echo signals after one RF excitation, e.g. using gradient refocusing in echo planar imaging [EPI], RF refocusing in rapid acquisition with relaxation enhancement [RARE] or using both RF and gradient refocusing in gradient and spin echo imaging [GRASE]
- G01R33/5616—Echo train techniques involving acquiring plural, differently encoded, echo signals after one RF excitation, e.g. using gradient refocusing in echo planar imaging [EPI], RF refocusing in rapid acquisition with relaxation enhancement [RARE] or using both RF and gradient refocusing in gradient and spin echo imaging [GRASE] using gradient refocusing, e.g. EPI
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56563—Correction of image distortions, e.g. due to magnetic field inhomogeneities caused by a distortion of the main magnetic field B0, e.g. temporal variation of the magnitude or spatial inhomogeneity of B0
Description
-対象物から参照MR信号データを収集するステップと;
-参照MR信号データからB0マップを引き出すステップと;
-感度マップの幾何学的歪を補正するため、B0マップによる感度マップを構成し、感度マップは、一つ又はそれより多くのRF受信コイルの空間感度プロファイルを示す、ステップと;
-k-スペースのサブサンプリングにより、一つ又はそれより多くの受信コイルを介して対象物からイメージングMR信号データを収集するステップと;
-イメージングMR信号データからMR画像を再構成し、サブサンプリングアーチファクトが、もたらされた感度マップを使用して除去される、ステップと
を有する。本発明によれば、感度マップ及び/又はイメージングMR信号データは、EPIを使って収集されてもよい。代わりに、三次元フィールドエコー(FFE)シーケンスが、感度マップの収集のために使用されてもよい。B0不均一性による幾何学歪を補正する構成は、感度マップに適用される。随意に、対応する補正は、収集されたイメージングMR信号データにももたらされてもよい。補正の後、感度マップは、患者の解剖部のそれぞれの位置における、使用された受信コイルの「真の」感度を正確に表す。それによって本発明は、SENSE再構成の後、残留するサブサンプリングアーチファクトを低減することを可能にする。

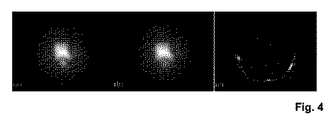
これらのマップは、水及び脂肪信号の位置に関して、非常に有用な情報を提供する。水及び脂肪マップは、B0マップに沿って同時に得られる。それ故に、余分な収集時間又は再構成時間は、必要とされない。図4aは、従来のSENSEプレスキャンから結果としてもたらされる正則化マップを示す。図4bは、マルチポイントディクソン水マップから得られる正則化マップを表し、図4cは、マルチポイントディクソン脂肪マップから得られる正則化マップを表す。マルチポイントディクソンマップを使うことにより、コンディショニングはかなり向上させられる。再構成された水及び脂肪画像におけるSNRは、かなり低減される。これは、図5に示される生体内MR画像において、明確に理解されることができる。図5aは、従来のSENSE収集及び再構成スキームと組み合わされて従来のSENSEプレスキャンから得られるヘッド画像を示す。かなりのサブサンプリングアーチファクトは観測される。図5bは、本発明に従うプレスキャン及び感度マップの対応するB0補正による同じ画像を示す。標準的な正則化マップは、図5bにおいてもたらされる。サブサンプリングアーチファクトは、図5aと比較してかなり低減される。図5cにおいて、マルチポイントディクソンプレスキャンから得られる水及び脂肪マップが、正則化マップとして使われる。サブサンプリングアーチファクト低減は、図5cにおいてより強くなる。さらに、SNRは増やされ、画像バックグランドは、図5bにおけるものより非常にきれいになる。
Claims (10)
- MR装置の検査ボリュームにおいて位置される対象物のMRイメージングの方法であって、
-マルチポイントディクソン技術を使用して、及び空間感度プロファイルを示す感度マップを持つ二つ又はそれより多くのRF受信コイルを用いて、前記対象物から参照MR信号データを収集するステップと、
-前記参照MR信号データからB0マップを引き出すステップと、
-前記参照MR信号データからマルチポイントディクソン水マップ及びマルチポイントディクソン脂肪マップを引き出すステップと、
-前記感度マップの幾何学的歪に対して、前記B0マップによって前記感度マップを補正するステップと、
-k-スペースのサブサンプリングにより、前記二つ又はそれより多くの受信コイルを介して前記対象物からイメージングMR信号データを収集するステップと、
-前記イメージングMR信号データからMR画像を再構成し、サブサンプリングアーチファクトが、前記補正された感度マップを使用して除去される、ステップと
を有する方法において、
-前記感度マップの前記補正は、水からの信号及び脂肪からの信号にそれぞれ関連する前記補正された感度マップの計算を含み、
-前記MR画像の前記再構成は、水画像及び脂肪画像を同時に展開するために、前記補正された感度マップを使用する、正則化されたSENSE再構成スキームによって実行され、
-前記正則化は、正則化マップとして、前記参照MR信号データから引き出された前記マルチポイントディクソン水マップ及び/又は前記マルチポイントディクソン脂肪マップを使用する、
方法。 - 前記参照MR信号データは、前記イメージングMR信号データの画像分解能より低い画像分解能で収集される、請求項1に記載の方法。
- 前記参照MR信号データ及び/又は前記イメージングMR信号データは、エコープレーナイメージングを用いることによって収集される、請求項1又は2に記載の方法。
- 脂肪比率は、前記マルチポイントディクソン水マップ及び前記マルチポイントディクソン脂肪マップから計算され、前記脂肪比率は、それぞれの画像位置における水及び脂肪プロトンの信号寄与の関係を示し、前記脂肪比率は、前記MR画像を再構成する前記ステップにおいて使用される、請求項1に記載の方法。
- 前記水画像は、水感度マップを使用して再構成され、前記脂肪画像は、前記水感度マップと異なる脂肪感度マップを使用して再構成される、請求項4に記載の方法。
- 前記脂肪感度マップは、脂肪シフトの方向における変換によって前記水感度マップから計算される、請求項5に記載の方法。
- 前記水画像は、水正則化マップを使用して再構成され、前記脂肪画像は、脂肪正則化マップを使用することによって再構成される、請求項1に記載の方法。
- 前記水正則化マップは、前記マルチポイントディクソン水マップからもたらされ、脂肪正則化マップは、前記マルチポイントディクソン脂肪マップからもたらされる、請求項7に記載の方法。
- 請求項1乃至8の何れかの一項に記載の方法を実行するためのMR装置であって、前記MR装置は、検査ボリューム内において均一な定常磁場B0を生成するための少なくとも一つの主磁石コイルと、前記検査ボリューム内における異なる空間方向において、スイッチされる磁場傾斜を生成するためのいくつかの傾斜コイルと、前記検査ボリューム内においてRFパルスを生成するための、少なくとも一つのRFコイルと、前記検査ボリュームにおいて位置される対象物からMR信号を受信するための、一つ又はそれより多くの受信コイルと、スイッチされる磁場傾斜及びRFパルスの時間連続性を制御するための制御ユニットと、再構成ユニットとを含み、前記MR装置は、
-空間感度プロファイルを示す感度マップを持つ二つ又はそれより多くのRF受信コイルを用いて、マルチポイントディクソン技術を使用して、前記対象物から参照MR信号データを収集するステップと、
-前記参照MR信号データからB0マップを引き出すステップと、
-前記参照MR信号データからマルチポイントディクソン水マップ及びマルチポイントディクソン脂肪マップを引き出すステップと、
-前記感度マップの幾何学的歪に対して、前記B0マップによって前記感度マップを補正するステップと、
-k-スペースのサブサンプリングにより、前記二つ又はそれより多くの受信コイルを介して前記対象物からイメージングMR信号データを収集するステップと、
-前記イメージングMR信号データからMR画像を再構成し、サブサンプリングアーチファクトが、前記補正された感度マップを使用して除去される、ステップと
を実行するように構成され、
-前記感度マップの前記補正は、水からの信号及び脂肪からの信号にそれぞれ関連する前記補正された感度マップの計算を含み、
-前記MR画像の前記再構成は、水画像及び脂肪画像を同時に展開するために、前記補正された感度マップを使用する、正則化されたSENSE再構成スキームによって実行され、
-前記正則化は、正則化マップとして、前記参照MR信号データから引き出された前記マルチポイントディクソン水マップ及び/又は前記マルチポイントディクソン脂肪マップを使用する、
MR装置。 - MR装置上で実行されるべきコンピュータプログラムであって、前記コンピュータプログラムは、
-マルチポイントディクソン技術を使用して、及び空間感度プロファイルを示す感度マップを持つ二つ又はそれより多くのRF受信コイルを用いて、対象物から参照MR信号データを収集するステップと、
-前記参照MR信号データからB0マップを引き出すステップと、
-前記参照MR信号データからマルチポイントディクソン水マップ及びマルチポイントディクソン脂肪マップを引き出すステップと、
-前記感度マップの幾何学的歪に対して、前記B0マップによって前記感度マップを補正するステップと、
-k-スペースのサブサンプリングにより、前記二つ又はそれより多くの受信コイルを介して前記対象物からイメージングMR信号データを収集するステップと、
-前記イメージングMR信号データからMR画像を再構成し、サブサンプリングアーチファクトが、前記補正された感度マップを使用して除去される、ステップと
のための命令を有し、
-前記感度マップの前記補正は、水からの信号及び脂肪からの信号にそれぞれ関連する前記補正された感度マップの計算を含み、
-前記MR画像の前記再構成は、水画像及び脂肪画像を同時に展開するために、前記補正された感度マップを使用する、正則化されたSENSE再構成スキームによって実行され、
-前記正則化は、正則化マップとして、前記参照MR信号データから引き出された前記マルチポイントディクソン水マップ及び/又は前記マルチポイントディクソン脂肪マップを使用する、
コンピュータプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13170826.5 | 2013-06-06 | ||
| EP13170826 | 2013-06-06 | ||
| PCT/EP2014/061644 WO2014195384A1 (en) | 2013-06-06 | 2014-06-05 | Parallel mri with b0 distortion correction and multi-echo dixon water-fat separation using regularised sense reconstruction |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016519994A JP2016519994A (ja) | 2016-07-11 |
| JP2016519994A5 JP2016519994A5 (ja) | 2017-07-13 |
| JP6243522B2 true JP6243522B2 (ja) | 2017-12-06 |
Family
ID=48626277
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016517592A Active JP6243522B2 (ja) | 2013-06-06 | 2014-06-05 | 正則化された検出再構成を使用するマルチエコーディクソン水−脂肪分離及びb0歪補正による並列mri |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10107882B2 (ja) |
| EP (1) | EP3004908B1 (ja) |
| JP (1) | JP6243522B2 (ja) |
| CN (1) | CN105308469B (ja) |
| WO (1) | WO2014195384A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2461175A1 (en) * | 2010-12-02 | 2012-06-06 | Koninklijke Philips Electronics N.V. | MR imaging using a multi-point Dixon technique |
| EP2646842A2 (en) * | 2010-12-02 | 2013-10-09 | Koninklijke Philips N.V. | Mr imaging using a multi-point dixon technique |
| JP6446027B2 (ja) * | 2013-04-03 | 2018-12-26 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 高snrの同相画像及び低snrの少なくとも部分的に異相の画像を使用するディクソン型の水/脂肪分離mri |
| DE102015202062A1 (de) * | 2015-02-05 | 2016-08-11 | Siemens Healthcare Gmbh | Rekonstruktion von Magnetresonanzbilddaten für mehrere chemische Substanzarten bei Multi-Echo-Bildgebungsverfahren |
| WO2017177197A1 (en) * | 2016-04-08 | 2017-10-12 | The Johns Hopkins University | Method of fast imaging of nmr parameters with variably-accelerated sensitivity encoding |
| EP3497456B1 (en) * | 2016-08-15 | 2023-10-11 | Koninklijke Philips N.V. | Mr imaging with dixon-type water/fat separation |
| JP7025410B2 (ja) * | 2016-08-25 | 2022-02-24 | コーニンクレッカ フィリップス エヌ ヴェ | 補正された感度符号化磁気共鳴イメージング |
| EP3495832A1 (en) * | 2017-12-11 | 2019-06-12 | Koninklijke Philips N.V. | Diffusion mr imaging with fat suppression |
| EP3511725A1 (en) * | 2018-01-11 | 2019-07-17 | Koninklijke Philips N.V. | Dual resolution dixon magnetic resonance imaging |
| US10955506B2 (en) * | 2018-03-09 | 2021-03-23 | Koninklijke Philips N.V. | Parallel MR imaging with spectral fat suppression |
| US11333731B2 (en) * | 2018-04-13 | 2022-05-17 | Canon Medical Systems Corporation | Magnetic resonance imaging apparatus, RF coil, and magnetic resonance imaging method |
| JP7267816B2 (ja) * | 2018-04-13 | 2023-05-02 | キヤノンメディカルシステムズ株式会社 | 磁気共鳴イメージング装置、rfコイル及び磁気共鳴イメージング方法 |
| EP3719525A1 (en) * | 2019-04-01 | 2020-10-07 | Koninklijke Philips N.V. | Correction of magnetic resonance images using simulated magnetic resonance images |
| EP3751300A1 (en) * | 2019-06-13 | 2020-12-16 | Koninklijke Philips N.V. | Reconstruction of spiral k-space sampled magnetic resonance images |
| EP3770625A1 (en) * | 2019-07-24 | 2021-01-27 | Siemens Healthcare GmbH | Mri using compressed sensing with improved regularization parameter |
| CN110780248A (zh) * | 2019-11-12 | 2020-02-11 | 无锡鸣石峻致医疗科技有限公司 | 一种基于磁共振原理的器官脂肪无创定量检测系统 |
| US11287504B2 (en) * | 2020-08-11 | 2022-03-29 | Uih America, Inc. | Systems and methods for magnetic resonance imaging |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7084626B2 (en) * | 2003-06-30 | 2006-08-01 | Board Of Regents, The University Of Texas System | Methods and apparatuses for fast chemical shift magnetic resonance imaging |
| US8072215B2 (en) * | 2006-07-06 | 2011-12-06 | Koninklijke Philips Electronics N.V. | Magnetic resonance device and method |
| EP2288941A4 (en) | 2008-05-02 | 2011-12-21 | Univ Jefferson | PHASE MARKING BASED ON SENSITIVITY CODING: DATA COLLECTION AND IMAGE RECONSTRUCTION FOR GEOMETRIC EPI CORRECTION CORRECTION |
| US8373415B2 (en) * | 2010-04-15 | 2013-02-12 | Wisconsin Alumni Research Foundation | Method for separating magnetic resonance imaging signals using spectral distinction of species |
| CN102232830B (zh) * | 2010-04-30 | 2014-09-03 | 西门子(深圳)磁共振有限公司 | 一种磁共振成像水脂分离方法 |
| US8326010B2 (en) * | 2010-05-03 | 2012-12-04 | General Electric Company | System and method for nuclear magnetic resonance (NMR) temperature monitoring |
| CN102525460B (zh) * | 2010-12-29 | 2013-11-06 | 西门子(深圳)磁共振有限公司 | 一种磁共振成像水脂图像辨析方法及装置 |
| US9030201B2 (en) * | 2011-01-27 | 2015-05-12 | Siemens Medical Solutions Usa, Inc. | System and method for independent manipulation of a fat and a water component in magnetic resonance imaging |
| CN102949189B (zh) * | 2011-08-31 | 2015-03-18 | 上海联影医疗科技有限公司 | 一种磁共振成像中用多通道数据组合实现水脂分离的方法 |
| WO2016070167A1 (en) * | 2014-11-01 | 2016-05-06 | Mayo Foundation For Medical Education And Research | Sparse reconstruction strategy for multi-level sampled mri |
| DE102015202062A1 (de) * | 2015-02-05 | 2016-08-11 | Siemens Healthcare Gmbh | Rekonstruktion von Magnetresonanzbilddaten für mehrere chemische Substanzarten bei Multi-Echo-Bildgebungsverfahren |
-
2014
- 2014-06-05 EP EP14729281.7A patent/EP3004908B1/en active Active
- 2014-06-05 JP JP2016517592A patent/JP6243522B2/ja active Active
- 2014-06-05 WO PCT/EP2014/061644 patent/WO2014195384A1/en active Application Filing
- 2014-06-05 US US14/895,006 patent/US10107882B2/en active Active
- 2014-06-05 CN CN201480032066.7A patent/CN105308469B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10107882B2 (en) | 2018-10-23 |
| EP3004908A1 (en) | 2016-04-13 |
| WO2014195384A1 (en) | 2014-12-11 |
| EP3004908B1 (en) | 2021-04-28 |
| US20160124064A1 (en) | 2016-05-05 |
| JP2016519994A (ja) | 2016-07-11 |
| CN105308469A (zh) | 2016-02-03 |
| CN105308469B (zh) | 2019-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6243522B2 (ja) | 正則化された検出再構成を使用するマルチエコーディクソン水−脂肪分離及びb0歪補正による並列mri | |
| US10444315B2 (en) | MRI with motion correction using navigators acquired using a dixon technique | |
| US9575154B2 (en) | MR imaging using a multi-point dixon technique | |
| JP5547800B2 (ja) | 並列信号収集を利用したmr撮像 | |
| JP6333293B2 (ja) | 金属耐性mr画像化 | |
| US9223001B2 (en) | MR imaging using navigators | |
| EP3044604B1 (en) | Metal resistant mr imaging | |
| US10591565B2 (en) | Parallel MR imaging with RF coil sensitivity mapping | |
| CN109716155B (zh) | 具有迪克逊型水/脂肪分离的mr成像 | |
| JP7128972B2 (ja) | 歪み補正を伴うepi mr画像 | |
| CN111164444B (zh) | 具有经改进的脂肪位移校正的Dixon型水/脂肪分离MR成像 | |
| EP3480617A1 (en) | Diffusion weighted turbo spin echo mr imaging with motion compensation | |
| CN114402214A (zh) | 狄克逊型水/脂肪分离mr成像 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170601 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170601 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170601 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170713 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170727 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171017 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171109 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6243522 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |