JP6185866B2 - Position detecting device and position detecting method for underwater moving body - Google Patents
Position detecting device and position detecting method for underwater moving body Download PDFInfo
- Publication number
- JP6185866B2 JP6185866B2 JP2014054921A JP2014054921A JP6185866B2 JP 6185866 B2 JP6185866 B2 JP 6185866B2 JP 2014054921 A JP2014054921 A JP 2014054921A JP 2014054921 A JP2014054921 A JP 2014054921A JP 6185866 B2 JP6185866 B2 JP 6185866B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- underwater
- unit
- moving body
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Monitoring And Testing Of Nuclear Reactors (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Description
本発明は、3次元移動可能な水中移動体の位置を検知する水中移動体の位置検知装置に関する。 The present invention relates to an underwater moving body position detection device that detects the position of an underwater moving body capable of three-dimensional movement.
3次元移動が可能な水中移動体の位置を検出する水中移動体の位置検知装置を利用した技術としては、3次元移動可能な水中検査装置を用いて原子炉内の構造物の検査作業を行う原子炉内検査システムが知られている。 As a technique using a position detection device for an underwater moving body that detects the position of an underwater moving body that can move three-dimensionally, a structure in a nuclear reactor is inspected using an underwater inspection device that can move three-dimensionally. In-reactor inspection systems are known.
この種の技術の一例として、任意の水平面で水中移動体から周囲の構造物までの距離を計測することで当該水平面における当該構造物の形状を示す画像データ(測定画像)を作成し、次に、当該構造物の設計情報等から得られる当該水平面における当該構造物の形状を示す画像データであって、水平位置情報が付されている画像データ(記憶画像)を測定画像とマッチングすることで、水中移動体の水平位置を算出する位置検知装置がある(特開2010−203888号公報参照)。 As an example of this type of technology, image data (measurement image) indicating the shape of the structure on the horizontal plane is created by measuring the distance from the underwater moving body to the surrounding structure on an arbitrary horizontal plane, The image data indicating the shape of the structure in the horizontal plane obtained from the design information of the structure, etc., and matching the image data (stored image) with the horizontal position information with the measurement image, There is a position detection device that calculates the horizontal position of an underwater moving body (refer to JP 2010-203888 A).
上記文献に係る位置検知装置は、既知の構造物の設計情報をもとに予め作成しておいた記憶画像と、その場で距離センサで計測した当該構造物までの距離をもとに作成される測定画像とのマッチング処理により水中移動体の位置を算出している。そのため、例えば当該距離センサとして超音波センサを利用した場合には、当該構造物の表面で超音波が多重反射(反響など)して、設計情報の構造物には存在しない像(虚像や鏡像などと称される)が測定画像上に虚像ノイズとして表れることがある。この場合には、実際の構造物の状態が記憶画像作成時と異なっているとき、または、測定画像にノイズ(構造物の有無と関係の無い画素)が含まれているときと同様に、記憶画像と測定画像のマッチング率が低下するため、マッチング箇所の同定に誤りが生じて水中移動体の位置算出精度が低下するおそれがある。すなわち、上記文献に係る位置検知装置は、設計情報と異なる環境下で使用する場合には、その位置検知精度の点で改善の余地がある。 The position detection device according to the above document is created based on a stored image created in advance based on design information of a known structure and a distance to the structure measured by a distance sensor on the spot. The position of the underwater moving object is calculated by matching processing with the measured image. Therefore, for example, when an ultrasonic sensor is used as the distance sensor, an ultrasonic wave is reflected multiple times (echoed) on the surface of the structure, and an image (virtual image, mirror image, etc.) that does not exist in the structure of the design information May appear as virtual image noise on the measurement image. In this case, the storage is performed in the same manner as when the actual state of the structure is different from when the stored image is created or when the measurement image includes noise (pixels not related to the presence or absence of the structure). Since the matching rate between the image and the measurement image is lowered, there is a possibility that an error occurs in identification of the matching portion and the position calculation accuracy of the underwater moving body is lowered. That is, when the position detection device according to the above document is used in an environment different from the design information, there is room for improvement in terms of position detection accuracy.
本発明の目的は、構造物の設計情報と測定情報が異なる環境下での位置検知精度を向上できる水中移動体の位置検知装置及び位置検知方法を提供することにある。 An object of the present invention is to provide a position detection apparatus and a position detection method for an underwater moving body that can improve position detection accuracy in an environment where design information and measurement information of a structure are different.
本発明は、上記目的を達成するために、3次元空間を移動可能な水中移動体と、構造物の設計情報に基づいて作成された或る平面上の画像データであって、当該或る平面上での前記構造物の外形と、当該構造物の外形を構成する線を基準とした当該構造物の外形の鏡像とが、位置情報と関連付けて表された画像データが記憶された記憶装置と、前記或る平面上において前記水中移動体の周囲を距離センサで走査することで得られる画像データであって、前記或る平面における前記構造物の外形が表された測定画像を取得する画像取得部と、前記記憶装置に記憶された前記画像データと前記画像取得部で取得された前記測定画像との対応関係と、前記記憶装置に記憶された前記画像データに付された位置情報とに基づいて、前記或る平面上における前記水中移動体の位置を算出する位置算出部とを備えるものとする。 In order to achieve the above object, the present invention is an image data on a certain plane created on the basis of design information of an underwater moving body movable in a three-dimensional space and a structure. A storage device storing image data in which the outer shape of the structure above and a mirror image of the outer shape of the structure with reference to a line constituting the outer shape of the structure are associated with position information; Image acquisition obtained by scanning the periphery of the underwater moving object on the certain plane with a distance sensor, and obtaining a measurement image representing the outer shape of the structure on the certain plane Unit, a correspondence relationship between the image data stored in the storage device and the measurement image acquired by the image acquisition unit, and position information attached to the image data stored in the storage device On the certain plane That is intended to comprise a position calculating unit for calculating the position of the underwater vehicle.
本発明によれば、構造物の設計情報と測定情報が異なる環境下での水中移動体の位置の検知精度を向上させることができる。 ADVANTAGE OF THE INVENTION According to this invention, the detection accuracy of the position of the underwater moving body in the environment where the design information and measurement information of a structure are different can be improved.
まず、本発明の実施の形態を説明する前に、本発明に係る水中移動体の位置検知装置が備える主な特徴について説明する。 First, before describing the embodiments of the present invention, main features of the position detection device for an underwater moving body according to the present invention will be described.
(1)本発明に係る水中移動体の位置検知装置は、3次元空間を移動可能な水中移動体と、構造物の設計情報に基づいて作成された或る平面上の画像データであって、当該或る平面上での前記構造物の外形と、当該構造物の外形を構成する線を基準とした当該構造物の外形の鏡像とが、位置情報と関連付けて表された画像データが記憶された記憶装置と、前記或る平面上において前記水中移動体の周囲を距離センサで走査することで得られる画像データであって、前記或る平面における前記構造物の外形が表された測定画像を取得する画像取得部と、前記記憶装置に記憶された前記画像データと前記画像取得部で取得された前記測定画像との対応関係と、前記記憶装置に記憶された前記画像データに付された位置情報とに基づいて、前記或る平面上における前記水中移動体の位置を算出する位置算出部とを備えることを特徴とする。 (1) An underwater moving body position detection apparatus according to the present invention is an underwater moving body that is movable in a three-dimensional space, and image data on a certain plane created based on design information of a structure, Stored is image data in which the outer shape of the structure on the certain plane and the mirror image of the outer shape of the structure with reference to the lines constituting the outer shape of the structure are associated with the position information. A storage device and a measurement image representing an outer shape of the structure on the certain plane, the image data obtained by scanning the periphery of the underwater moving object on the certain plane with a distance sensor. The image acquisition unit to be acquired, the correspondence between the image data stored in the storage device and the measurement image acquired by the image acquisition unit, and the position attached to the image data stored in the storage device Based on the information Characterized in that it comprises a position calculation unit for calculating the position of the underwater vehicle on the plane.
このように、前記構造物の設計情報に基づいて作成した当該構造物の外形だけでなく、当該外形を構成する線を基準とした当該構造物の外形の鏡像までも埋め込んだ前記画像データと、当該画像データと略同じ平面上で前記距離センサを走査して得た前記測定画像との対応関係をとる(例えば、画像相関処理によるマップマッチングで対応関係をとる)と、前記距離センサ(例えば超音波センサ)を利用して当該測定画像の取得の際に多重反射に起因した前記構造物の虚像が当該測定画像上に表れていても、当該測定画像における当該虚像と前記画像データにおける前記鏡像とを対応付けることができるので、虚像の発生によるマッチング率の低下が抑制でき、水中移動体の位置検知精度を向上できる。 Thus, not only the outline of the structure created based on the design information of the structure, but also the image data embedded with a mirror image of the outline of the structure with reference to the lines constituting the outline; When the correspondence with the measurement image obtained by scanning the distance sensor on substantially the same plane as the image data is obtained (for example, correspondence is obtained by map matching by image correlation processing), the distance sensor (for example, super Even if a virtual image of the structure due to multiple reflection appears on the measurement image when the measurement image is acquired using a sound wave sensor, the virtual image in the measurement image and the mirror image in the image data Since the matching rate due to the generation of a virtual image can be suppressed, the position detection accuracy of the underwater moving body can be improved.
なお、前記画像データに埋め込む鏡像は、前記構造物の外形を構成する線を含み前記或る平面に直交する鏡面を仮想的に設定し、当該鏡面に対して当該構造物の外形が写った像に基づいて作成される。例えば、当該構造物の外形を構成する線が直線(または略直線とみなせる程度に充分に緩やかな曲線)であって当該鏡面が平坦(または平坦とみなせる)の場合には、当該鏡面(当該直線)に関して対称をなす当該外形の像が鏡像となる。また、当該構造物の外形が複数の直線の組み合わせのみで規定されており、当該外形に曲線が含まれていない場合には、当該複数の直線のそれぞれについて当該外形と線対称な図形を鏡像とすれば良いので、鏡像作成処理は容易となる。 The mirror image to be embedded in the image data is an image in which a mirror surface that includes a line that forms the outer shape of the structure and that is orthogonal to the certain plane is virtually set, and the outer shape of the structure is reflected on the mirror surface. Created based on For example, when the line constituting the outer shape of the structure is a straight line (or a sufficiently gentle curve that can be regarded as a substantially straight line) and the mirror surface is flat (or can be regarded as flat), the mirror surface (the straight line) ) Is a mirror image. In addition, when the outer shape of the structure is defined only by a combination of a plurality of straight lines, and the outer shape does not include a curve, a figure that is line-symmetric with the outer shape of each of the plurality of straight lines is a mirror image. Therefore, the mirror image creation process is easy.
また、前記画像データへの鏡像の埋め込み処理は、事前に行っておいて当該画像データに予め埋め込んでおいても良いし、前記水中移動体の位置検知の際に鏡像を作成して当該鏡像を当該画像データにその都度埋め込んでも良い。つまり、前記記憶装置に対しての、構造物の設計情報に基づいて作成される当該構造物の外形の記憶時期(作成時期)と、当該構造物の鏡像の記憶時期(作成時期)は、実質的に同じでも良いし異なっていても良い。そして、前記水中移動体の位置検知の都度に鏡像を前記画像データに付加する場合には、前記水中移動体の周囲に形成される一部の鏡像のみを作成し(例えば、多重反射後の波動の検知が可能な範囲に形成される鏡像のみを作成する)、それを前記画像データに埋め込んでも良い。 Further, the process of embedding the mirror image in the image data may be performed in advance and embedded in the image data in advance, or a mirror image is created when the position of the underwater moving body is detected and the mirror image is created. It may be embedded in the image data each time. That is, the storage time (creation time) of the outer shape of the structure created based on the design information of the structure and the storage time (creation time) of the mirror image of the structure for the storage device are substantially May be the same or different. When a mirror image is added to the image data every time the position of the underwater moving body is detected, only a part of the mirror image formed around the underwater moving body is created (for example, a wave after multiple reflections). Only a mirror image formed in a range in which the detection can be performed) may be embedded in the image data.
(2)また、本発明に係る水中移動体の位置検知装置は、3次元空間を移動可能な水中移動体と、構造物の設計情報に基づいて作成された或る平面上の画像データであって、前記3次元空間内で互いに異なる複数の平面上における前記構造物の外形が位置情報と関連付けて表された複数の記憶画像が記憶された記憶装置と、前記3次元空間で前記水中移動体の位置する平面上において当該水中移動体の周囲を距離センサで走査することで得られる画像データであって、当該平面上における前記構造物の外形が表された測定画像を取得する画像取得部と、前記複数の記憶画像の中から前記水中移動体の位置情報を取得するために利用される記憶画像を、前記水中移動体の姿勢および垂直位置に基づいて選択し、当該選択された記憶画像を選択画像とする画像選択部と、当該選択画像中の前記構造物の外形を構成する線を基準とした当該外形の鏡像を当該選択画像に付加する鏡像処理部と、前記鏡像処理部で前記鏡像が付加された前記選択画像と前記測定画像の対応関係と、前記選択画像に付された位置情報とに基づいて、前記水中移動体の位置する平面における当該水中移動体の位置を算出する位置算出部とを備えることを特徴とする。 (2) The underwater mobile object position detection apparatus according to the present invention is an underwater mobile object that can move in a three-dimensional space, and image data on a certain plane that is created based on design information of the structure. A storage device storing a plurality of stored images in which the outer shapes of the structures on a plurality of different planes in the three-dimensional space are associated with position information, and the underwater vehicle in the three-dimensional space An image acquisition unit that acquires a measurement image representing an outer shape of the structure on the plane, which is image data obtained by scanning the periphery of the underwater moving body with a distance sensor on the plane where Selecting a stored image to be used for acquiring position information of the underwater moving body from the plurality of stored images based on an attitude and a vertical position of the underwater moving body, and selecting the selected stored image Selected image An image selection unit, a mirror image processing unit for adding a mirror image of the outer shape with reference to a line constituting the outer shape of the structure in the selected image, and the mirror image is added by the mirror image processing unit. A position calculating unit that calculates a position of the underwater moving object in a plane on which the underwater moving object is positioned based on the correspondence relationship between the selected image and the measurement image and the position information attached to the selected image; It is characterized by providing.
このように水中移動体の位置検知装置を構成すると、上記(1)の場合のような或る平面における前記水中移動体の位置だけでなく、3次元空間における前記水中移動体の位置を検出することができる。なお、前記鏡像処理部により前記記憶画像に前記鏡像を付加する処理は、前記画像選択部による画像選択の前に行っておいても良く、前記記憶画像とともに前記鏡像を予め前記記憶装置に記憶しておいても良い。 When the underwater moving body position detection device is configured in this way, not only the position of the underwater moving body in a certain plane as in the case of (1) above, but also the position of the underwater moving body in a three-dimensional space is detected. be able to. The process of adding the mirror image to the stored image by the mirror image processing unit may be performed before image selection by the image selection unit, and the mirror image is stored in the storage device in advance together with the stored image. You can keep it.
なお、前記画像選択部で利用される前記水中移動体の垂直位置を算出する手段としては、例えば、水中における前記水中移動体の深度を検出する圧力センサが利用可能である。 In addition, as a means for calculating the vertical position of the underwater moving body used in the image selection unit, for example, a pressure sensor that detects the depth of the underwater moving body in water can be used.
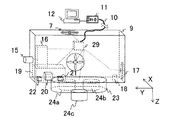
以下、本発明の実施の形態について図面を用いて説明する。図1は本発明の実施の形態に係る原子炉内検査システムの概略図である。この図に示す原子炉1には、シュラウド2、上部格子板3、炉心支持板4、及びシュラウドサポート5等の構造物が設置されており、PLR(Primary Loop Re-circulation System:一次冷却材再循環系)配管6等の配管が接続されている。原子炉1の上部には作業スペースであるオペレーションフロア7があり、さらにその上方には燃料交換装置8がある。
Hereinafter, embodiments of the present invention will be described with reference to the drawings. FIG. 1 is a schematic diagram of an in-reactor inspection system according to an embodiment of the present invention. In the
本実施の形態の原子炉内検査システムは、原子炉1内の構造物の目視検査に用いる水中検査装置9(水中移動体)と、ケーブル10を介して水中検査装置9に接続された制御装置11と、この制御装置11に接続され、水中検査装置9のカメラ画像を表示するとともに水中検査装置9の位置や姿勢等を表示する表示装置12と、制御装置11に接続され、水中検査装置9を操作可能な操作装置13を備えている。原子炉1内の構造物の目視検査作業を行う場合、燃料交換装置8上の検査員14は、原子炉1内に水中検査装置9を投入し、この水中検査装置9の位置や姿勢を表示装置12で確認しつつ、操作装置13を操作する。
The in-reactor inspection system of the present embodiment includes an underwater inspection device 9 (underwater moving body) used for visual inspection of structures in the
また、本発明に係る水中移動体の位置検知装置の他の適用先としては、図2に示すような、原子力発電所内のプールのように複数の平坦な壁面及び底面によって形成される閉空間(例えば、使用済燃料プール)での調査が挙げられる。プールのような単純な形状の場合、構造物が平坦な壁などの外形形状によって構成されているため、超音波が多重反射をおこしやすく、反響の影響が大きくなることが予想される。 In addition, as another application destination of the position detection device for an underwater vehicle according to the present invention, as shown in FIG. 2, a closed space formed by a plurality of flat wall surfaces and bottom surfaces like a pool in a nuclear power plant ( For example, a survey on the spent fuel pool). In the case of a simple shape such as a pool, since the structure is configured by an outer shape such as a flat wall, it is expected that ultrasonic waves are likely to cause multiple reflections, and the influence of reverberation increases.
図3は本発明の実施の形態に係る水中検査装置9の概略図である。
この図において、水中検査装置9は、本体の前面側(図3中左側)に設けられ原子炉1内の構造物等を撮像するカメラ15と、カメラ15の画像を電子情報化する画像取込部16を備えている。また、水中検査装置9は、本体の上面側(図3中上側)、後面側(図3中右側)、及び左側面側(図3中紙面に向かって手前側)にそれぞれ設けられた3つのスラスタ(推進機構)17を備えている。3つのスラスタ17は、それぞれ、スクリューと、スクリューを正回転又は逆回転に駆動するモータ(図示せず)で構成されている。スラスタ17は、水中検査装置9に対して上下方向(図3中上下方向)の推力、前後方向(図3中左右方向)の推力、及び左右方向(図3中紙面に対し垂直方向)の推力をそれぞれ付与する。すなわち、このスラスタ17により、水中検査装置9は水で満たされた3次元空間を自在に移動可能となっている。なお、以降、水中検査装置9の座標系は、本体における垂直下向き(検査装置9の高さ方向下向き)がZ軸正方向である右手座標系を定義して説明する。具体的には、本体の右方向(図3中紙面に向かって奥方向)がX軸正方向、前方向(図3中左方向)がY軸正方向、下方向(図3中下方向)がZ軸正方向となっており、X軸及びY軸はZ軸と直交しかつ互いに直交している。
FIG. 3 is a schematic diagram of the underwater inspection apparatus 9 according to the embodiment of the present invention.
In this figure, an underwater inspection device 9 is provided on the front side (the left side in FIG. 3) of the main body and captures an image of a structure or the like in the
水中検査装置9は、水中検査装置9に作用する水圧を検出する圧力センサ(垂直位置検出器)18と、原子炉1内における水中検査装置9の姿勢(姿勢角)を検出するための慣性センサ部(姿勢角検出器)19と、本体下部(底面)に取り付けられたレンジセンサユニット(相対距離検出器)23を備えている。
The underwater inspection apparatus 9 includes a pressure sensor (vertical position detector) 18 that detects water pressure acting on the underwater inspection apparatus 9 and an inertial sensor for detecting the attitude (attitude angle) of the underwater inspection apparatus 9 in the
圧力センサ18で検出された圧力は、原子炉1内における水中検査装置9の垂直位置(深度)の検出に用いられる。また、慣性センサ部19は、X軸、Y軸、及びZ軸周りの角速度をそれぞれ検出する3軸ジャイロ(角速度検出器)20と、X軸及びY軸周りの角度(傾斜角)を検出する傾斜計(傾斜角検出器)21と、Z軸周りの角度(方位角)を検出する地磁気センサ(方位角検出器)22を有しており、これらの検出値は水中検査装置9の姿勢角の検出に用いられる。
The pressure detected by the
図4はレンジセンサユニット23の概略構造を表す水平断面図であり、図5は図4中の断面IV−IVにおける断面図(垂直断面図)である。
4 is a horizontal sectional view showing a schematic structure of the
レンジセンサユニット23は、水で満たされた3次元空間で水中検査装置9の位置に応じて定められる水平面上において、水中検査装置9から当該水中検査装置9の周囲に存在する構造物までの相対距離を検出するものである。レンジセンサユニット23のケーシング25内には、水中検査装置9の前方側及び後方側に配置された合計2つの走査型のレーザセンサ(レーザレンジファインダ)24a,24bが収納されている。ケーシング25の下面(底面)には超音波アレイセンサ24d(後述の図7参照)が内蔵された超音波センサユニット24c(図3参照)が取り付けられている。このように本実施の形態では、水中検査装置9から周囲の構造物までの相対距離を検出するセンサとして、レーザセンサ24a,24bと、超音波アレイセンサ24dを備えている。なお、本稿における「水平面」とは、完全な水平面のみを示すだけでなく、誤差等も含んだ実質的に水平な面を意味するものとする。
The
ケーシング25の材質は、レーザセンサ24a,24bから投光されるレーザが透過可能なものであれば良く、例えば、ポリエチレンテレフタレートやポリプロピレン等の透光性を有する樹脂がある。
The
レーザセンサ24a,24bは、それぞれ、レーザを投光する投光部26と、投光したレーザを受光する受光部27を有している。投光部26は、走査装置(図示せず)によってZ軸周りに回転されて、同一平面上(ここでは水平面上となる)にレーザを走査する。投光部26より投光及び走査されたレーザは周囲の構造物等に反射して受光部27で受光される。
Each of the
ところで、本実施の形態のレーザセンサ24a,24bでは、投光部26と受光部27が分離されており、レーザセンサ24a,24bには投光部26側と受光部27側を区画する略U字状の遮光板26がそれぞれ設けられている。遮光板26は、投光部26からのレーザ光の一部がケーシング25の内表面で反射して生じる反射光が受光部27で受光されるのを防ぐためのものである。
By the way, in the
なお、図4に示すように、ケーシング25の前方側側面部は、その水平断面がレーザセンサ24aを中心とした円弧状になるように形成することが好ましく、また、ケーシング25の後方側側面部は、その水平断面がレーザセンサ24bを中心とした円弧状になるように形成することが好ましい。このようにケーシング25を形成すると、投光部26からのレーザ光が直交して出射するとともに、受光部27で受光する反射光が直交して入射するので、ケーシング25への出入射に伴うレーザ光の強度低下を抑制することができるからである。また、レーザセンサ24a,24bの構造は例えば特開2006−349449号公報に詳しい。
As shown in FIG. 4, the front side surface portion of the
図6はレンジセンサユニット23の測定動作の説明図である。この図に示すように、本実施の形態におけるレンジセンサユニット23では、レーザセンサ24aは、水中検査装置9の前方側範囲となる走査角度θa(1)〜θa(n)の範囲(例えば−30°〜210°程度の範囲)でレーザ光を走査するとともにその反射光を受光して、構造物Aとの相対距離M(1)〜M(n)をそれぞれ検出する。
FIG. 6 is an explanatory diagram of the measurement operation of the
また、レーザセンサ24bは、水中検査装置9の後方側範囲となる走査角度θb(1)〜θb(n)の範囲(例えば150°〜390°程度の範囲)でレーザ光を走査するとともにその反射光を受光して、構造物Aとの相対距離M(n+1)〜M(2n)をそれぞれ検出する。これにより、レーザセンサ24a,24bが位置する平面上における水中検査装置9とその周囲の構造物との相対距離を検出することができる。
Further, the
図7は超音波センサユニット24cの概略構造を表す水平断面図であり、図8は図7中の断面A−Aにおける断面図(水平断面図)である。
7 is a horizontal sectional view showing a schematic structure of the
超音波センサユニット24cは、水で満たされた3次元空間で水中検査装置9の位置に応じて定められる水平面上において、水中検査装置9から当該水中検査装置9の周囲に存在する構造物までの相対距離の分布を測定するものである。超音波センサユニット24cは、超音波の送信や受信を行う複数個の圧電素子から構成される超音波アレイセンサ24dを内蔵している。圧電素子は、水平面(図中のXY平面)に直線上または円弧状に複数個配置され、これにより水平面(XY面)内での超音波の送受信が可能となる。圧電素子の材質は、例えば、PZTなどの圧電セラミクッスや、圧電セラミックスと樹脂の複合材(コンポジット材)などでよい。
The
超音波アレイセンサ24dを構成する複数個の圧電素子のうち、例えば、8個や16個といった複数の圧電素子の組みをひとまとめとした素子群24e(図8参照)を送信用または受信用の素子群として使用する。
Among a plurality of piezoelectric elements constituting the
例えば、超音波アレイセンサ24dが64個の圧電素子で構成され、送信または受信用に16個の圧電素子を用いる場合、連続する16個をひとまとめとして超音波ビームを送信し、同じ16個の素子で水中から反射する超音波(エコー)を受信する。次に、今使用した16個に隣接する1個を加え、その加えた側と反対側の1個の使用を中止するようにすることで、前回の15個と新規の1個という新しい16個の組みあわせの素子群を形成し、この素子群で超音波を送信・受信をする。この新しい16個はちょうど1素子分だけずれているので、超音波の送受信方向がずれることになる。
For example, when the
このように、16個の素子群を構成する組合せを順次1素子ずつ切り替えていくことで、送受信方向を切り替えることができ、水平断面(XY面)に超音波を走査することが可能となる。このように超音波の送受信方向を切替えながら、超音波の反射波の受信時間を計測することで、超音波アレイセンサ24dの周辺の距離分布の計測が可能となる。
In this way, by sequentially switching the combinations constituting the 16 element groups one by one, it is possible to switch the transmission / reception direction, and it is possible to scan the ultrasonic wave on the horizontal section (XY plane). Thus, by measuring the reception time of the reflected ultrasonic wave while switching the transmission / reception direction of the ultrasonic wave, the distance distribution around the
本実施の形態では、レーザまたは超音波の送信時刻からその反射波の受信時刻までの伝播時間(または飛行時間)に基づいて周囲の構造物までの相対距離を測定している。このように測定した相対距離は、測定画像算出部36(後述)における測定画像の算出に主に用いられる。 In this embodiment, the relative distance to the surrounding structure is measured based on the propagation time (or flight time) from the transmission time of the laser or ultrasonic wave to the reception time of the reflected wave. The relative distance measured in this way is mainly used for measurement image calculation in a measurement image calculation unit 36 (described later).
図3に戻り、水中検査装置9には信号伝送部29が設けられている。そして、信号伝送部29及びケーブル10を介して、圧力センサ18、慣性センサ部19(3軸ジャイロ20、傾斜計21、地磁気センサ22)、レンジセンサユニット23(レーザセンサ24a,24b)および/または超音波センサユニット24c(超音波アレイセンサ24d)からの検出信号並びに画像取込部16からの画像信号が制御装置11に出力されている。そして、制御装置11は、前述した検出信号等に基づいて水中検査装置9の位置や姿勢を算出し、この算出した水中検査装置9の位置や姿勢を表示装置12に出力して表示している。また、制御装置11は、前述した画像信号を表示装置12に出力して、カメラ15の画像などを表示している(後の図17等で詳述)。また、制御装置11は、操作装置13からの操作信号に応じてスラスタ17を駆動制御する制御信号を生成し、この生成した制御信号をケーブル10及び信号伝送部29を介してスラスタ17に出力している。
Returning to FIG. 3, the underwater inspection apparatus 9 is provided with a
圧力センサ18は、水中検査装置9の底面から外部に露出したセンサ部(図示せず)を有しており、当該センサ部に作用する水圧を検出することで圧力を検出している。なお、圧力センサ18の設置の有無は、センサ部を外部から視認することで容易に確認できる。
The
制御装置11は、コンピュータであり、ハードウェアとして、各種プログラムを実行するための演算手段としての演算処理装置(例えば、CPU)と、当該プログラムをはじめ各種データを記憶するための記憶手段としての記憶装置(例えば、ROM、RAMおよびフラッシュメモリ等の半導体メモリや、ハードディスクドライブ等の磁気記憶装置)と、各装置と水中検査装置9に係る各センサ等へのデータ及び指示等の入出力制御を行うための入出力演算処理装置を備えている(いずれも図示せず)。
The
次に、制御装置11の位置・姿勢算出機能について説明する。図9は制御装置11の機能ブロック図である。
Next, the position / attitude calculation function of the
この図に示すように、制御装置11は、3軸ジャイロ20の角速度信号に基づきX軸、Y軸、及びZ軸周りの角速度をそれぞれ算出する角速度算出部30と、傾斜計21の角度信号に基づきX軸及びY軸周りの傾斜角をそれぞれ算出するとともに、地磁気センサ22の角度信号に基づきZ軸周りの方位角を算出する角度算出部31と、これら算出された角速度、傾斜角、及び方位角に基づき水中検査装置9の姿勢角(3軸周りの姿勢角)を算出する姿勢角算出部32として機能する。また、圧力センサ18の圧力信号に基づき水中における水中検査装置9の深度、すなわち垂直位置を算出する垂直位置算出部33としても機能する。
As shown in this figure, the
制御装置11は、測定画像算出部36と、画像記憶部34と、画像選択部35と、鏡像処理部35aと、画像修正部42と、対応部分特定部37と、水平位置算出部38と、位置・姿勢記憶部80として機能する。
The
測定画像算出部36は、レンジセンサユニット23(レーザセンサ24a,24b)または超音波センサユニット24c(超音波アレイセンサ24d)で検出された水中検査装置9と構造物との相対距離に基づいて、その相対距離を検出した水平面(以下において「スキャン平面」と称することがある)における構造物の外形の画像データ(測定画像)を算出・作成する処理(ビットマップ化処理)を行う部分である。
The measurement image calculation unit 36 is based on the relative distance between the underwater inspection apparatus 9 and the structure detected by the range sensor unit 23 (
本実施の形態における測定画像算出部36は、検出した相対距離を画像に変換する際に、距離[mm]を画素値[pixel]に変換する係数Kを使用してビットマップ化処理を行っている。このビットマップ化処理によって得られた画像は、複数の点(画素)の集合で表されており、原子炉1内の構造物をスキャン平面で切断したときの外形の一部を表すことになる。なお、本実施の形態では係数Kの値として、測定画像が一定のサイズ(例えば、640x480[pixel])のビットマップ画像となる値が採用されている。
When converting the detected relative distance into an image, the measurement image calculation unit 36 in the present embodiment performs bitmap processing using a coefficient K that converts the distance [mm] into the pixel value [pixel]. Yes. The image obtained by this bitmap processing is represented by a set of a plurality of points (pixels), and represents a part of the outer shape when the structure in the
画像記憶部34は、原子炉1およびその内部の構造物の設計情報に基づいて作成される複数の画像データであって、原子炉1内(3次元空間)で垂直位置の異なる複数の水平面における構造物の外形の画像データ(記憶画像)が記憶されている部分であり、制御装置11に係る記憶装置内の所定の領域に確保されている。
The
本実施の形態に係る画像記憶部34に記憶されている各記憶画像は、垂直位置の異なる複数の水平面で原子炉1内の構造物を切断したときの当該構造物の外形を表しており、各記憶画像には、それぞれの切断位置を示す情報である原子炉1内における垂直位置情報が付与されている。なお、本記憶画像は、構造物の表面形状、すなわち構造物内部に存在する構造物の外形情報を削除したものである。
Each stored image stored in the
また、画像記憶部34に記憶された各記憶画像を構成する画素の少なくとも1つには、原子炉1内の3次元空間に対応する水平位置情報が付されており(以下、この水平位置情報が付された画素を「基準画素」と称することがある)、各記憶画像は原子炉1内における水平位置の地図として機能している。なお、水平位置の算出精度を向上させる観点からは、記憶画像の画像サイズは大きいほど好ましい。画像サイズを大きくするほど各画素に付与する水平位置情報の精度を向上させることができるからである。
Further, at least one of the pixels constituting each stored image stored in the
画像選択部35は、測定画像算出部36によって測定画像を得たときの水中検査装置9の垂直位置や、測定画像と画像記憶部34内の複数の記憶画像とのマッチング率等に基づいて、画像記憶部34に記憶された複数の記憶画像の中から水中検査装置9の位置算出に利用する記憶画像を最終的に1枚選択する処理を実行する部分である。
The
本実施の形態の画像選択部35は、圧力センサ18で検出された水中検査装置9の垂直位置に基づいて、画像記憶部34に記憶された複数の記憶画像の中からレンジセンサユニット23が相対距離を検出した水平面に対応する記憶画像を選択している。具体的には、画像選択部35は、垂直位置算出部33で算出された垂直位置と一致する垂直位置情報を有する記憶画像(一致するものが無い場合には垂直位置が最も近い画像)を選択画像として選択する。
In the
また、この選択画像の選択方法に追加・代替して行われる他の選択方法としては、水中検査装置9の垂直位置に近い垂直位置情報を有する記憶画像を所定の枚数だけ抽出し、その抽出した記憶画像のそれぞれと測定画像に対して画像相関処理によるマップマッチングを実行し、当該複数の記憶画像の中からマッチング率の高いものを1枚選択し、最終的にその1枚を選択画像とするものがある。 Further, as another selection method performed in addition to or in place of the selection method of the selected image, a predetermined number of stored images having vertical position information close to the vertical position of the underwater inspection device 9 are extracted and extracted. Map matching by image correlation processing is executed for each of the stored images and the measured image, and one image having a high matching rate is selected from the plurality of stored images, and finally that one image is selected. There is something.
また、上記の選択方法に追加・代替して行われる更に他の方法としては、初回の選択のみ水中検査装置9の位置(主に垂直方向位置)から最適な画像を選択し、その後の水平位置算出処理には、対応部分特定部37で算出されるマッチング率が選択画像の再選択が不要なことを示す閾値M2未満に到達したときに、マッチング率がM2以上に到達する他の記憶画像を改めて選択する方法がある。このマッチング率がM2以上の他の画像を改めて選択する場合の具体的手段としては、まず、現在の選択画像(マッチング率がM2未満のもの)に垂直方向情報が近い数枚の記憶画像であって、水中検査装置9の移動可能範囲内にあるものを再選択の候補として挙げ、次に、その候補に挙げた複数の記憶画像と測定画像とのマッチング率をそれぞれ算出し、最もマッチング率の高い記憶画像を選択画像として選択する方法がある。このように選択画像を選択すれば、常にマッチング率が一定値以上の記憶画像を用いることができるので、水中検査装置9の水平位置算出処理の精度を向上することができる。
Further, as another method performed in addition to or in place of the above selection method, an optimal image is selected from the position of the underwater inspection device 9 (mainly the vertical position) only for the first selection, and the horizontal position thereafter. In the calculation process, when the matching rate calculated by the corresponding
本実施の形態に係る水中検査装置9はレンジセンサユニット23(レーザセンサ24a,24b)および超音波センサユニット24c(超音波アレイセンサ24d)を備えているため、測定画像算出部36によって得られる測定画像について、レーザと超音波の2方式を用いることができる。レーザと超音波は波長が数百nmと数mmとオーダが大きくことなることから、媒質(水)での透過特性が大きく異なる。一般に、波長の短いレーザはより精密に構造物の形状や距離を計測できる反面、超音波に比べて短い距離の計測に適する。従って、近距離はレーザで高精密に計測し、遠距離は超音波で距離や形状を計測するといった相補的な手法を採用することが好ましく、そのような構成を本実施の形態では利用可能となっている。
Since the underwater inspection apparatus 9 according to the present embodiment includes the range sensor unit 23 (
ところで、超音波センサユニット24cが利用する超音波は水などの媒質中での透過性が良好なため、超音波センサから送信された超音波が構造物などの外表面で反射を繰り返し(多重反射、反響)、ノイズ信号として計測される可能性がある。計測されたノイズ信号は測定画像上にちょうど鏡に何度も写った鏡像のような偽りの画像(虚像)として現れるため、距離分布計測や自己位置検知の精度を低下させる要因となることが予想される。しかし、本実施の形態では、多重反射に起因する虚像も構造物の外形形状に由来する信号であることに着目し、ノイズとして切り捨てるのではなく、選択画像とのマッチングに積極的に利用することで、距離分布計測や自己位置検知の精度向上を図っている。
By the way, since the ultrasonic wave used by the
鏡像処理部35aは、画像選択部35で選択された選択画像(記憶画像)において、構造物の外形形状から多重反射の効果を計算で算出し、選択画像(記憶画像)に多重反射による仮想的な外形データ(鏡像データ)を付加する処理を行う部分である。以下においては鏡像処理部35aにより鏡像データが付加された選択画像を鏡像付加選択画像と称することがある。
The mirror
画像修正部42は、鏡像処理部35aで取得された鏡像付加選択画像と、測定画像算出部(画像取得部)36で取得された測定画像とをそれぞれ簡略化することで修正する処理を行う部分であり、鏡像処理部35aから出力される鏡像付加選択画像の修正を行う選択画像修正部42aと、測定画像算出部36から出力される測定画像の修正を行う測定画像修正部42bを備えている。
The
画像修正部42によって行われる画像修正処理は、対応部分特定部37による測定画像と鏡像付加選択画像のマッチング率の向上に寄与する。例えば、修正前の測定画像には、設計情報に存在する構造物の他にも、設計情報に無い構造物の外形や、計測誤差による構造物以外のデータ(画素)等が含まれる。そのため、設計情報に無い構造物の外形や計測誤差による構造物以外のデータを測定画像から削除したものを新たな測定画像(修正後の測定画像)とする。一方、鏡像付加選択画像については、修正前の鏡像付加選択画像から所定の大きさ未満の細かい構造物の外形や主要構造物の内部に収納された構造物の外形を捨象する等することで主要構造物の外形のみを抽出し、当該鏡像付加選択画像を簡略化したものを新たな鏡像付加選択画像(修正後の鏡像付加選択画像)とする。
The image correction process performed by the
対応部分特定部37は、画像修正部42で修正された鏡像付加選択画像と測定画像とに対してマップマッチングを行うことで、当該鏡像付加選択画像上における当該測定画像に対応する部分を特定する部分である。すなわち、対応部分特定部37は、測定画像に表れた構造物の外形が鏡像付加選択画像に表れた構造物の外形のどの部分に対応するかを探索する。測定画像と鏡像付加選択画像の一致(対応)の程度はマッチング率で表される。画像修正部42で画像修正処理を施した鏡像付加選択画像と測定画像をマッチングさせると、両者のマッチング率が向上する。
The corresponding
水平位置算出部38は、対応部分特定部37で特定された鏡像付加選択画像上の部分において相対距離を検出した位置(すなわち、水中検査装置9の位置(正確にはレンジセンサユニット23または超音波センサユニット24cの位置、さらに正確にはレーザセンサ24a,24bまたは超音波アレイセンサ24dの位置だが、本稿ではこれらを同じ意味で利用する))に対応する画素を特定し、その特定した画素の位置と基準画素の位置から水中検査装置9の水平位置を算出する部分である。
The horizontal
ここにおける「相対距離を検出した位置」とは、図6等からも明らかなように、測定画像の中心に位置し、水中検査装置9の水平位置を示す。したがって、鏡像付加選択画像において測定画像の中心が位置する画素の位置が分かれば、当該画素と基準画素の距離を求めることにより、水平検査装置9の水平位置を算出することができる。なお、このとき画素から距離データへの変換が必要な場合には、距離から画素値に変換する際に用いた定数Kの逆数(すなわち、1/K)を画素値に乗じれば良い。 Here, the “position where the relative distance is detected” indicates the horizontal position of the underwater inspection apparatus 9 located at the center of the measurement image, as is apparent from FIG. Therefore, if the position of the pixel where the center of the measurement image is located in the mirror image addition selection image is known, the horizontal position of the horizontal inspection device 9 can be calculated by obtaining the distance between the pixel and the reference pixel. If conversion from pixel to distance data is necessary at this time, the pixel value may be multiplied by the reciprocal of the constant K (that is, 1 / K) used when converting from the distance to the pixel value.
位置・姿勢記憶部80は、上記のように垂直位置算出部33、水平位置算出部37、及び姿勢角算出部32で演算された水中検査装置9の垂直位置、水平位置、及び姿勢角を記憶する部分である。位置・姿勢記憶部80に記憶された垂直位置、水平位置、及び姿勢角は、水中検査装置9の垂直位置、水平位置、及び姿勢角として表示装置12に送信され、画像取込部16で電子情報化された目視検査用のカメラ15の映像とともに表示される。
The position /
次に上記のように構成される制御装置11で行われる制御処理内容について説明する。図10は制御装置11の位置・姿勢算出機能に係わる制御処理内容を表すPAD図である。
Next, the contents of control processing performed by the
この図において、まずステップ39で水中検査装置9の初期位置・初期姿勢角が入力されて位置・姿勢記憶部38に記憶される。そして、ステップ40に進んで水中検査装置9の操作開始とともにその位置・姿勢算出処理に移る。この位置・姿勢算出処理において、姿勢角算出処理(ステップ41)と、垂直位置算出処理(ステップ42)と、測定画像算出処理(ステップ43)と、水平位置算出処理(ステップ44)が順次繰り返し行われ、その都度ごとにステップ41,42,44で算出された姿勢角、垂直位置及び水平位置が位置・姿勢記憶部38に記憶される(ステップ45)。以下、各算出処理の詳細を説明する。
In this figure, first, at
(1)姿勢角算出処理
図11は図10に示すステップ41の姿勢角算出処理の詳細を表すPAD図である。この姿勢角算出処理において、角速度算出部30は、まず、3軸ジャイロ20の角速度信号を取り込み、角度算出部31は、傾斜計21及び地磁気センサ22の角度信号を取り込む(ステップ46)。
(1) Posture Angle Calculation Processing FIG. 11 is a PAD diagram showing details of the posture angle calculation processing in
そして、ステップ47に進み、角速度算出部30は、3軸ジャイロ20の角速度信号から各軸(X軸、Y軸、Z軸)周りの角速度を算出する角速度算出処理に移る。本実施の形態の3軸ジャイロ20は、静電浮上型ジャイロであり、角速度に比例する増減値が基準電圧(一定の電圧値)に加えられた正の電圧値を出力する。そのため、まずステップ48において、3軸ジャイロ20の各軸(X軸、Y軸、Z軸)周りの信号に対し基準電圧を減じる基本処理を行う。ここで、基準電圧は、通常、3軸ジャイロ20の固有スペックとして示されているが、本実施の形態では、角速度信号が入力されないときの電圧値を予め計測して平均化したものを用いる。その後、ステップ49に進んで、電圧−角速度換算係数(3軸ジャイロ20の固有のスペックとして示される一定値)を乗じて各軸周りの角速度を算出する。
Then, the process proceeds to step 47, where the angular
ステップ47の角速度算出処理が終了すると、ステップ50に進み、角度算出部31は、傾斜計21の角度信号から各軸(X軸、Y軸)周りの傾斜角を算出する傾斜角算出処理に移る。本実施の形態の傾斜計21は、封入された電解液の液面変化(X軸及びY軸周りの傾斜角)を電圧変化に変換して出力するものである。そのため、まずステップ51において、各軸(X軸、Y軸)周りの信号から基準電圧(傾斜計21の固有スペックとして示される一定の電圧値)を減じる基本処理を行う。その後、ステップ52に進んで、傾斜角換算係数(傾斜計21の固有スペックとして示される一定値)を乗じて各軸周りの傾斜角を算出する。
When the angular velocity calculation process of
ステップ50の傾斜角算出処理が終了すると、ステップ53に進み、角度算出部31は、地磁気センサ22の角度信号からZ軸周りの方位角を算出する方位角算出処理に移る。本実施の形態の地磁気センサ22は、X軸方向及びY軸方向に感度を有するホール素子で捉えた磁力を出力するものである。そのため、まずステップ54において、X軸及びY軸の地磁気信号から基準電圧を減じ、ゲインを乗じる基本処理を行う。ここで、基準電圧及びゲインは、地磁気センサ22を使用する環境により異なるため、予め使用する領域で測定したものを用いる。その後、ステップ55に進んで、基本処理したX軸及びY軸の信号Mx,Myを用い、下記の式(1)によりZ軸周りの方位角θmを算出する。
When the tilt angle calculation process of

ステップ53の方位角算出処理が終了すると、ステップ56に進み、姿勢角算出部32は、上述したX軸、Y軸、及びZ軸周りの角速度、X軸及びY軸周りの傾斜角、Z軸周りの方位角をカルマンフィルタ(この種のものとして公知のものであり、例えば上記特許文献1参照)に入力し、水中検査装置9の姿勢角(3軸周りの姿勢角)の最適値を推定する。その後、ステップ57に進んで、推定した水中検査装置9の姿勢角を位置・姿勢記憶部38に記憶する。このステップ57の手順が終了すると姿勢角算出処理が終了する。
When the azimuth calculation process of
(2)垂直位置算出処理
図12は図10に示すステップ42の垂直位置算出処理の詳細を表すPAD図である。この垂直位置算出処理において、垂直位置算出部33は、まず、下記の式(2)に基づいて圧力Pを算出する。すなわち、まず、ステップ58において圧力センサ18の圧力信号(検出電圧)を取り込む。そして、ステップ59に進んで、検出電圧Vpから基準電圧Vp_base(圧力センサ18の固有スペックとして示される一定の電圧値)を減じ、さらに圧力換算係数Kv_p(圧力センサ18の固有スペックとして示される一定値)を乗じて圧力Pを算出する。
(2) Vertical Position Calculation Processing FIG. 12 is a PAD diagram showing details of the vertical position calculation processing in
次に、垂直位置算出部33は、ステップ60に進んで、算出した圧力Pと原子炉1内の冷却材の密度ρと重力加速度gとを用い、下記の式(3)により水中検査装置9の深度Hを算出する。そして、算出した深度Hに例えばオペレーションフロア7から水面までの距離Lw(図1,2参照)を加えて、水中検査装置9の垂直位置とする。
Next, the vertical
その後、ステップ61に進んで、算出した水中検査装置9の垂直位置を位置・姿勢記憶部38に記憶する。このステップ61の手順が終了すると垂直位置算出処理が終了する。
Thereafter, the process proceeds to step 61, where the calculated vertical position of the underwater inspection device 9 is stored in the position /
ところで、以下に続く測定画像算出処理(ステップ43)と水平位置算出処理(ステップ44)では、その理解を容易にするために、水中検査装置9で中空直方体内を検査する場合を適宜参照しながら説明する。 By the way, in the measurement image calculation process (step 43) and the horizontal position calculation process (step 44) that follow, in order to facilitate understanding thereof, the case where the hollow rectangular parallelepiped is inspected by the underwater inspection apparatus 9 is referred to as appropriate. explain.
図13は制御装置11による鏡像付加処理、測定画像算出処理、画像修正処理及び水平位置算出処理の説明図である。この図に示す水中検査装置9は、水で満たされた中空直方体90内に配置されている。中空直方体90の内部には3つの小型構造物(例えば配管)45が配置されている。水中検査装置9の水平位置は、画像選択部35で選択されたスキャン平面Sにおける選択画像91と、当該選択画像91に鏡面処理部35aによる鏡像付加処理を施して得られる鏡像付加選択画像91Mと、当該鏡像付加選択画像91Mに選択画像修正部42aによる画像修正処理を施して得られる選択画像91Rと、平面Sで検出された測定画像92と、当該測定画像92に測定画像修正部42bによる画像修正処理を施して得られる測定画像92Rとに基づいて算出される。なお、選択画像91,91M,91R及び測定画像92,92Rのサイズはすべて640×480[pixel]であり、選択画像91,91M,91Rの中心点をC91とし、測定画像92,92Rの中心点をC92とする。
FIG. 13 is an explanatory diagram of mirror image addition processing, measurement image calculation processing, image correction processing, and horizontal position calculation processing by the
図13中の鏡像付加選択画像91Mには、選択画像91に対して、中空直方体90の内壁面82a,82b,82c,82dを基準とした当該中空直方体90の鏡像81a,81b,81c,81dが付加されている。中空直方体90の内壁面は、その外形として4つの平坦な壁面82a,82b,82c,82dを有しているため、当該4つの壁面82a,82b,82c,82dの1つを示す直線を対称軸にして残りの3つの壁面を示す直線を反転させた像81a,81b,81c,81dが鏡像であり、選択画像91には合計で4つの鏡像81a,81b,81c,81dが鏡像付加処理により付加されている。なお、図13の例では、各鏡像81a,81b,81c,81dの全体を選択画像91内に付加しているが、選択画像91の画像内に含まれる部分のみを鏡像として付加しても良く、選択画像91の画像サイズの外側に位置する鏡像は捨象しても良い。
The mirror image
(3)測定画像算出処理(構造物形状算出処理)
図14は図10に示すステップ43の測定画像算出処理の詳細を表すPAD図である。本実施の形態では鏡像付加選択画像と測定画像のマッチングが特徴となるため、ここでは測定画像を作成する際の距離センサとして超音波センサユニット24c(超音波アレイセンサ24d)を利用する場合を例に挙げて説明する。図14に示した測定画像算出処理において、測定画像算出部36は、まず、超音波アレイセンサ24dの出力信号を取り込む(ステップ62)。本実施の形態における超音波アレイセンサ24dでは図8で説明した方法で水平なスキャン平面(図13の例では面S)における構造物との相対距離が測定されており、超音波アレイセンサ24dからの出力信号には、構造物までの距離Mが情報として含まれている。測定画像算出部36は、ステップ62で取り込んだ出力信号から、スキャン平面上において構造物の表面(外形)が位置する座標値L(xL,yL)を算出する(ステップ63)。
(3) Measurement image calculation process (structure shape calculation process)
FIG. 14 is a PAD showing details of the measurement image calculation process in
次に、測定画像算出部36は、ステップ63で算出した各座標値xL,yLに係数Kを乗じ、その値を測定画像における構造物の表面を示す画素の座標値L’(KxL,KyL)とする(ステップ64)。すなわち、図13の例においてステップ64で得られた点P1の座標値が例えば(120,100)であった場合には、測定画像92の中心かつ水中検査装置9の中心の点C92からX軸の正方向へ120[pixel],Y軸の正方向へ100[pixel]進んだ位置が構造物の表面上の点P1の位置となる。そして、測定画像算出部36は、検出したすべての発振角度θについてステップ63,64の算出処理を行って測定画像92を得る。測定画像算出部36は、このように取得した測定画像92のデータを保存し(ステップ65)、測定画像算出処理を終了する。
Next, the measurement image calculation unit 36 multiplies each coordinate value xL, yL calculated in
(4)水平位置算出処理
図15は図10に示すステップ44の水平位置算出処理の詳細を表すPAD図である。この水平位置算出処理が開始すると、画像修正部42は、ステップ43で算出された測定画像92を取り込む(ステップ66)。
(4) Horizontal Position Calculation Processing FIG. 15 is a PAD diagram showing details of the horizontal position calculation processing in
一方、画像選択部35は、ステップ42で得られた水中検査装置9の垂直位置に基づいて、画像記憶部34内に記憶されている複数の記憶画像の中から、水中検査装置9の水平位置を算出するために利用する画像(選択画像91)を選択する(ステップ67)。すなわち、図13の例ではスキャン平面Sの垂直位置情報を有する記憶画像が選択画像91として選択される。
On the other hand, the
なお、ステップ67における選択画像の選択方法として、画像選択部35の説明箇所で触れた他の方法を利用しても良い。例えば、2回目以降の水平位置算出処理において水中検査装置9が垂直方向に移動することで選択画像と測定画像のマッチング率がM2未満に到達したときは、マッチング率がM2以上となる選択画像を改めて選択しても良い。
In addition, as a selection method of the selection image in
鏡像処理部35aは、ステップ67で選択された選択画像91に対して鏡像付加処理を施して、鏡像付加選択画像91Mを取得する。具体的には、選択画像91中で構造物の外形の鏡像を作成するために鏡面となる線を決定し、当該線を基準とした当該構造物の外形の鏡像を作成して選択画像に付加することで鏡面付加選択画像91Mを取得する。図13の例では、選択画像91中の中空直方体90の内壁は4つの直線(壁面)82a,82b,82c,82dを組み合わせて規定されており、当該4つの直線82a,82b,82c,82dのそれぞれが鏡面となる線となる。そこで、これら4つの直線82a,82b,82c,82dをそれぞれ対称軸にして合計4つの中空直方体90の鏡像81a,81b,81c,81dを作成し、当該4つの鏡像81a,81b,81c,81dを選択画像91中に付加したものが鏡像付加選択画像91Mとなっている。
The mirror
なお、図13の例では、選択画像91上に現れる可能性のある全ての鏡像を付加しているが、水中検査装置9から多重反射後の波動の検知が可能な一部の範囲に形成される鏡像のみを付加しても良い。また、ステップ67で選択された選択画像に対して鏡像付加処理を行う場合について説明したが、画像記憶部34に記憶される全ての記録画像に予め鏡像を付加しておいても良い。
In the example of FIG. 13, all the mirror images that may appear on the selected
次に、ステップ67aの鏡像付加処理が終了したら、画像修正部42は、ステップ66で取り込んだ測定画像92と、ステップ67aで鏡像を付加した選択画像91Mとに対して、画像修正処理を行う(ステップ68)。
Next, when the mirror image addition processing in step 67a is completed, the
ここで、ステップ68の測定画像92と選択画像91Mの修正処理について説明する。図16は画像修正部42a,42bの概略構成図である。この図に示すように画像修正部42a,42bは、それぞれ、膨張処理部142と、縮小処理部144と、クラスタリング処理部146と、クラスタ面積算出処理部148と、画像更新部150を備えている。
Here, the correction processing of the
画像修正処理に際して、膨張処理部142は、まず、取り込んだ選択画像91Mと測定画像92に対し、構造物形状を示す各画素を拡大する膨張処理を実施する。そして、縮小処理部144は、膨張処理が施された各画像に対して縮小処理を実施する。一般的に「測定画像」における構造物形状は点列で描かれるため、当該点列を構成する画素間に間隔が形成されることが多いが、上記の膨張処理部142と縮小処理部144による一連の処理により、当該画素間の間隔が満たされ、画素が線状に連続した構造物形状画像が得られる。
In the image correction process, the
次に、クラスタリング処理部146は、縮小処理が施された各画像に対してクラスタリング処理を実施し、各画像に含まれる構造物の形状(外形)を複数のクラスタに分類する。そして、クラスタ面積算出処理部148は、クラスタリング処理が実施された各画像に対して、各クラスタの面積を算出する処理を実施する。画像更新部150は、クラスタ面積算出処理で算出した各クラスタの面積を基に、所定の閾値A1以下の面積のクラスタは、画像測定時に発生したノイズである、または、主要構造物ではない、等と判断し、当該クラスタは画像中より削除する処理(画像更新処理)を実施する。
Next, the
上記の一連の画像修正処理により、各画像91M,92は、閾値A1を超える面積を有し所定の大きさ以上のクラスタのみが存在することになり、図13に示した画像91R,92Rのように簡略化される。具体的に説明すれば、図13の選択画像91Mには3つの小型構造物45が存在していたが、上記の一連の処理により修正後の選択画像91Rからは小型構造物45は削除されている。また、図13の測定画像92は間隔を介して配置される複数の点の集合で描かれていたが、上記の一連の処理により修正後の測定画像92Rでは構造物の形状は線状に繋がった点列で描かれている。さらに小型構造物45に係る画素は削除されており直方体90の壁面のみが残っている。また図13中に示されていないが、測定画像92の取得中に画素として記録されたノイズ等の構造物を示さない画素も削除できる。
Through the series of image correction processes described above, each of the
次に、対応部分特定部37は、ステップ68で画像修正処理を施した測定画像92Rと選択画像91Rに対して画像相関処理によるマップマッチングを行い、選択画像91R上で測定画像92Rに対応する部分を特定する。換言すれば、修正後の測定画像92Rと選択画像91Rがどのように重ね合わさるかが特定される(ステップ69)。ステップ68の画像修正処理を施した選択画像91Rと測定画像92Rでは、各画像で細かい構造物の形状を示す画素や構造物と無関係の画素が省略されており、面積の比較的大きい構造物のみが残っているので、記憶画像の作成時に存在しなかった小さな構造物やゴミが存在していたり、測定画像にノイズが混じったりしても、選択画像と測定画像のマッチング率が低下することを防止でき、構造物の設計情報と測定情報が異なる環境下での水中移動体9の位置の検知精度を向上させることができる。
Next, the corresponding
ステップ69において対応部分が特定できたら、水平位置算出部38は、まず、レンジセンサユニット23を利用して水中検査装置9から構造物までの距離を検出した位置(すなわち、測定画像の中心位置であって、水中検査装置9の中心位置)が、選択画像上のどの画素に対応するかを特定する。そして、その特定した画素の位置と、選択画像において水平位置情報が判明している画素(例えば、基準画素)の位置とから、水中検査装置9の水平位置を算出する(ステップ70)。
If the corresponding part can be specified in
ステップ70を図13の例で説明すると、修正後の選択画像91Rと測定画像92Rとは図13の右下に示したマッチングイメージ93が示すように重なるので、選択画像91R上において測定画像92Rの中心点C92に対応する画素を容易に特定できる。そして、選択画像91Rの中心点C91の画素は中空直方体90の中心に対応する基準画素なので、中心点C91と中心点C92との画素上における距離(シフト量94)を算出し、そのシフト量94を中空直方体90における距離データに変換すれば、中心点C92の水平位置(すなわち、水中検査装置9の水平位置)を算出することができる。なお、シフト量94を距離データへ変換する際には、測定画像算出部36において距離を画素値に変換する際に用いた定数Kの逆数(すなわち、1/K)をシフト量94(ξ,η)に乗じて算出すれば良い。このように水中検査装置9の水平位置の算出が終了したら、その算出した水平位置を位置・姿勢記憶部80に記憶する(ステップ71)。
The
ステップ71が終了したら一連の水平位置算出処理を終了する。上記の姿勢角算出処理(ステップ41)、垂直位置算出処理(ステップ42)、測定画像算出処理(ステップ43)、及び水平位置算出処理(ステップ44)で算出された水中検査装置値9の位置及び姿勢は位置・姿勢記憶部80を介して表示装置12に出力される。
When
なお、上記において画像修正部42の画像更新部150に利用される閾値A1は、画像更新部150による処理がユーザーの所望する結果となるように適宜変更可能とする。そして、閾値A1の変更時には、変更後の閾値に基づく画像修正結果が閾値A1とともに表示装置の画面上に表示されるように構成することが好ましく(後の図19参照)、このように構成することでユーザーの所望する結果に短時間で到達できるようになる。
In the above description, the threshold value A1 used by the
また、上記のクラスタ面積算出処理部148と画像更新部150は、各クラスタの面積を算出し、当該算出面積が閾値A1以下のクラスタを削除して各画像の修正を行ったが、各クラスタの図形が開いた形状で面積の算定が容易ではない場合等には、面積に代えて各クラスタの画素数を算出し、当該算出画素数が画素数用の閾値以下のクラスタを削除して各画像の修正を行っても良い。
In addition, the cluster area
また、本実施の形態では、2つの画像修正部42がそれぞれ膨張処理部142、縮小処理部144、クラスタリング処理部146、クラスタ面積算出処理部148および画像更新部150を備える場合について説明したが、一般的に「選択画像」は線状に連続した画素によって形成されることが多いため、選択画像修正部42aからは膨張処理部142と、縮小処理部144を省略しても構わない。
In the present embodiment, the case where the two
また、上記の実施の形態では、水平位置算出の都度、選択画像修正部42aで選択画像を修正する場合について説明したが、選択画像修正部42aが行う修正処理を画像記憶部34の全ての記憶画像に予め施しておいて、水平位置算出処理時における選択画像修正部42aによる画像修正処理を省略しても良い。この場合にはその都度行われる処理が減少するので、水平位置算出に要する時間を短縮できる。
In the above embodiment, the case where the selected
また、上記の実施の形態では、測定画像と選択画像の双方に画像修正処理を施してマッチングさせることで水中検査装置9の水平位置を算出する場合について説明したが、測定画像と選択画像のいずれか一方のみに画像修正処理を施して水平位置を算出しても良い。 In the above embodiment, the case where the horizontal position of the underwater inspection apparatus 9 is calculated by performing image correction processing and matching both the measurement image and the selection image has been described. Only one of them may be subjected to image correction processing to calculate the horizontal position.
図17は表示装置12の表示画面の一例を表す図である。この図に示す表示画面120は、位置座標表示部95と、水平位置画像表示部96と、カメラ映像表示部99を有している。
FIG. 17 is a diagram illustrating an example of a display screen of the
位置座標表示部95には、制御装置11の位置・姿勢記憶部38から読み込んだ水中検査装置9の絶対位置が表示される。水平位置画像表示部96には、水中検査装置9が位置する垂直位置における原子炉1内の水平断面画像とともに水中検査装置9の水平位置を示すマーカ94が表示される。
The position coordinate
水平位置画像表示部96における原子炉1内の水平断面画像は、例えば、制御装置11における構造物データ記憶部(図示せず)に記憶されている原子炉1の形状データ(例えば、CADデータ)と、垂直位置算出部33で算出された水中検査装置9の垂直位置とを利用して描かれており、水中検査装置9の垂直方向の移動に追従して随時変化する。また、水平位置画像表示部96には、水中検査装置9の投入位置(初期位置)をマーカ97でマークする機能や、水中検査装置9の移動軌跡98を表示又は非表示する機能が具備されている。
The horizontal cross-sectional image in the
カメラ映像表示部99は、水中検査装置9に搭載されたカメラ15の映像が表示される部分である。
The camera image display unit 99 is a portion where an image of the
なお、表示装置12は、図示しない他の表示画面に切り換えられるようになっており、位置・姿勢記憶部80から読み込んだ水中検査装置9の姿勢等も表示されるようになっている。このように構成された表示画面120によれば、検査員14は原子炉1内のどこに水中検査装置9があるかを視覚的に把握しながら検査することができる。
The
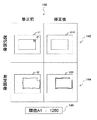
図18は表示装置12の他の表示画面の一例を表す図である。この図に示す表示画面130は、水中検査装置9による測定画像が表示される測定画像表示部110と、画像記憶部34の記憶画像もしくは選択画像(すなわち、原子炉の設計情報に基づいて作成した当初の記憶画像)または鏡像処理部35aによる鏡像付加画像が表示される記憶画像表示部115を有している。表示部110と表示部115に表示する画像は、それぞれ、画像修正部42a,42bによる修正後の画像へ切替可能な構成であり、操作者が修正前と修正後の画像を任意に選択して表示可能である。
FIG. 18 is a diagram illustrating an example of another display screen of the
なお、図18の例では測定画像と記憶画像(選択画像、鏡像付加画像)を個別のウィンドウに表示したが、測定画像と記憶画像(選択画像、鏡像付加画像)は1つのウィンドウ内に重ねて表示しても良い。その場合には、二つの画像の判別が容易になるように、各画像の色を異ならせること等して各画像の視認性の向上を図ることが好ましい。 In the example of FIG. 18, the measurement image and the stored image (selected image, mirror image added image) are displayed in separate windows. However, the measurement image and the stored image (selected image, mirror image added image) are overlapped in one window. You may display. In that case, it is preferable to improve the visibility of each image by making the colors of the images different so that the two images can be easily distinguished.
図19は表示装置12のさらに他の表示画面の一例を示す図である。この図に示す表示画面140は、画像修正部42による画像修正処理がユーザーの所望する結果となるように閾値A1を調整するための画面であり、選択画像修正部42aによる修正前の選択画像91(または鏡像付加画像91M)と修正後の選択画像91Rが表示される選択画像表示部142と、測定画像修正部42bによる修正前の測定画像92と修正後の測定画像92Rが表示される測定画像表示部144と、ユーザーが閾値A1を入力するための入力部146を備えている。入力部146の閾値を変更すると、当該変更後の閾値に応じて修正後の選択画像91Rと測定画像92Rがリアルタイムに変化するので、ユーザーは所望する簡略化が施された修正画像を容易に得ることができる。
FIG. 19 is a diagram showing an example of still another display screen of the
なお、図19の例では、修正前後の選択画像と、修正前後の測定画像とを同じ画面上に表示したが、いずれか一方を表示する表示態様を採用しても良い。また、図19の例では修正前後の画像(選択画像または測定画像)を同じ画面上に表示したが、修正前後の画像を個別のウィンドウで表示する等して個別に表示しても良い。つまり図19の表示例は種々存在する表示例の1つに過ぎない。 In the example of FIG. 19, the selected image before and after the correction and the measurement image before and after the correction are displayed on the same screen, but a display mode in which either one is displayed may be adopted. In the example of FIG. 19, the images before and after correction (selected images or measurement images) are displayed on the same screen. However, the images before and after correction may be displayed individually by displaying them in separate windows. That is, the display example of FIG. 19 is only one of various display examples.
図20は表示装置12のさらに他の表示画面の一例を示す図である。この図に示す表示画面160は、鏡像付加選択画像91Rと測定画像92Rが同時に表示される画面であり、鏡像付加選択画像91Rが表示される選択画像表示部162と、測定画像92Rが表示される測定画像表示部164を備えている。このように選択画像91Rと測定画像92Rを表示すると、測定画像92Rに虚像が含まれていることを容易に把握することができる。
FIG. 20 is a diagram showing an example of still another display screen of the
なお、図20の例では、選択画像91Rと測定画像92Rとを同じ画面上に表示したが、いずれか一方を表示する表示態様を採用しても良い。鏡像付加前の選択画像91を表示可能に構成しても良い。つまり図20の表示例は種々存在する表示例の1つに過ぎない。
In the example of FIG. 20, the
以上のように、本実施の形態に係る水中移動体(水中検査装置)の位置検知装置は、3次元空間を移動可能な水中検査装置9と、構造物の設計情報に基づいて作成された或る平面上の画像データであって、前記3次元空間内で互いに異なる複数の平面上における前記構造物の外形が、位置情報と関連付けて表された複数の記憶画像が記憶された画像記憶部34と、前記3次元空間で前記水中移動体の位置する平面上において当該水中検査装置9の周囲を超音波アレイセンサ24dで走査することで得られる画像データであって、当該平面上における前記構造物の外形が表された測定画像92を取得する測定画像算出部36と、前記複数の記憶画像の中から前記水中検査装置9の位置情報を取得するために利用される記憶画像を、前記水中検査装置9の姿勢および垂直位置に基づいて選択し、当該選択された記憶画像を選択画像91とする画像選択部35と、当該選択画像91中の前記構造物の外形を構成する線を基準とした当該外形の鏡像(81a,81b,81c,81d)を当該選択画像91に付加する鏡像処理部35aと、前記鏡像処理部35aで前記鏡像(81a,81b,81c,81d)が付加された鏡像付加選択画像91Mと前記測定画像92の対応関係と、前記鏡像付加選択画像91Mに付された位置情報とに基づいて、前記水中検査装置9の位置する平面における当該水中検査装置9の位置を算出する位置算出部38とを備えている。
As described above, the position detection device of the underwater vehicle (underwater inspection device) according to the present embodiment is created based on the underwater inspection device 9 that can move in the three-dimensional space and the design information of the structure. An
このように水中移動体の位置検知装置を構成すると、現実の構造物の状態が記憶画像作成時と異なっている場合や、測定画像に反響などによるノイズが含まれている場合にも、選択画像91に多重反射(反響)の影響を考慮した鏡像81a,81b,81c,81dを付加した鏡像付加選択画像91Mと、測定画像92とをマップマッチングすることで水中検査装置9の水平位置を算出することができるので、距離センサとして多重反射の影響を受けやすいもの(例えば超音波アレイセンサ24d)を利用して得た測定画像と選択画像を単にマッチングさせる場合と比較して、位置算出に伴う誤差を軽減することができる。したがって、本実施の形態によれば、構造物の設計情報と測定情報が異なる環境下での水中検査装置9の位置の検知精度を向上させることができる。
If the position detection device for an underwater moving body is configured in this way, the selected image can be used even when the state of the actual structure is different from that at the time of creating the stored image or when the measurement image includes noise due to reverberation or the like. The horizontal position of the underwater inspection apparatus 9 is calculated by map matching the mirror image addition selected
また、本実施の形態における水中検査装置9は、構造物との相対距離を検出する相対距離検出器(距離センサ)として、投光部26及び受光部27を有するレーザセンサ23a,23bを備えたレンジセンサユニット23を備えているので、次の効果を発揮する。すなわち、例えば投光部及び受光部のうちのいずれか一方を水中検査装置側に設けて他方を構造物側に設けるような構成では、水中検査装置が狭隘部若しくは複雑な構造物が介在するような環境下に配置された場合に、水中検査装置の位置を検知することが困難となる。これに対し本実施の形態では、投光部26及び受光部27をともに水中検査装置9側に設けているので、狭隘部や複雑な構造物が存在する環境下に配置された場合でも、水中検査装置9の位置を検知することができる。
Moreover, the underwater inspection apparatus 9 in the present embodiment includes
なお、上記では、記憶画像を構成する画素には水平位置情報が付された基準画素が1つ以上含まれている場合について説明したが、記憶画像を構成するすべての画素に水平位置情報を付しても良い。この場合には、選択画像上で測定画像の中心が位置する画素を特定できれば、当該画素に付された水平位置情報から水平位置を算出することができるようになるので、上記の場合と比較して水平処理算出処理を容易に行うことができる。 In the above description, the case where the pixels constituting the stored image include one or more reference pixels to which the horizontal position information is attached has been described. However, the horizontal position information is attached to all the pixels constituting the stored image. You may do it. In this case, if the pixel where the center of the measurement image is located on the selected image can be identified, the horizontal position can be calculated from the horizontal position information attached to the pixel. Thus, the horizontal processing calculation process can be easily performed.
また、上記の実施の形態では、相対距離検出器(距離センサ)として、超音波を送信してその反射波を受信する超音波センサ24dだけでなく、多数の方向にレーザを走査してその反射光を受光する走査型のレーザセンサ24a,24bを備えているため、構造物までの距離が遠い場合や測定環境の水が濁っている場合など、レーザなどの光の透過性が低下してレーザセンサ24a,24bによる相対距離検出が困難な場合においても、反響の影響を受けることなく超音波センサ24dによる相対距離検出、すなわち水中検査装置9の位置算出を精度良く実行できる。具体的には、構造物までの距離が所定の閾値以下である場合にはレーザセンサ24a,24bにより測定画像を取得し、構造物までの距離が当該閾値を超える場合には超音波センサ24dにより測定画像を取得するように制御装置11を構成するものがある。
In the above embodiment, the relative distance detector (distance sensor) is not only the
また、上記の説明では、位置算出に利用する測定画像と記憶画像は水平面に限定したが、測定画像と記憶画像は水平面に限らず、水平面と交差する他の面としても良い。この場合の構成例としては、検査対象である構造物の3次元モデルを記憶装置内に記憶しておき、測定画像を取得した時の水中検査装置9の垂直位置に近い位置で測定画像と平行な1以上の面でもって当該3次元モデルを切断し、その結果得られる1以上の画像を記憶画像とし、当該記憶画像を測定画像とマッチングさせることで水中検査装置9の水平位置を推定するものがある。なお、この場合には、水中検査装置9の姿勢から測定画像の水平面に対する傾きを推定し、当該傾きを有する1以上の画像を記憶画像として3次元モデルから切り出せば良い。 In the above description, the measurement image and the stored image used for position calculation are limited to the horizontal plane. However, the measurement image and the stored image are not limited to the horizontal plane and may be other planes that intersect the horizontal plane. As a configuration example in this case, a three-dimensional model of a structure to be inspected is stored in a storage device, and parallel to the measurement image at a position close to the vertical position of the underwater inspection device 9 when the measurement image is acquired. The three-dimensional model is cut by one or more planes, the one or more images obtained as a result are stored as images, and the stored image is matched with the measurement image to estimate the horizontal position of the underwater inspection apparatus 9 There is. In this case, the inclination of the measurement image with respect to the horizontal plane may be estimated from the attitude of the underwater inspection apparatus 9, and one or more images having the inclination may be cut out from the three-dimensional model as a stored image.
また、上記において図10およびこれに関連する図を利用して説明した各処理の順番は、一例に過ぎず、算出結果の変化が許容される範囲内で各処理の順番は適宜変更可能である。 Moreover, the order of each process demonstrated using FIG. 10 and the figure relevant to this in the above is only an example, and the order of each process is changeable suitably within the range to which the change of a calculation result is accept | permitted. .
また、上記の説明では、選択画像修正部42を制御装置11に備える場合を例に挙げて説明したが、選択画像修正部42を省略し、鏡像処理部35aからの選択画像と測定画像算出部36からの測定画像を対応部分特定部37でマップマッチングすることで、水中検査装置9の水平位置を算出しても良い。
In the above description, the case where the
さらに、以上の説明では原子炉内検査システムに用いられる水中移動体の位置検知装置について説明したが、本発明は、原子炉内の検査に用いる検査装置の位置検知だけでなく、水中で使用する移動体の位置検知に広く適用可能である。特に、本発明は、移動体を直接目視できない環境における当該移動体の位置把握に適している。 Furthermore, in the above description, the position detection device for the underwater mobile body used in the in-reactor inspection system has been described. It can be widely applied to the position detection of a moving body. In particular, the present invention is suitable for grasping the position of the moving body in an environment where the moving body cannot be directly visually observed.
なお、本発明は、上記の実施の形態に限定されるものではなく、その要旨を逸脱しない範囲内の様々な変形例が含まれる。例えば、本発明は、上記の実施の形態で説明した全ての構成を備えるものに限定されず、その構成の一部を削除したものも含まれる。 In addition, this invention is not limited to said embodiment, The various modifications within the range which does not deviate from the summary are included. For example, the present invention is not limited to the one having all the configurations described in the above embodiment, and includes a configuration in which a part of the configuration is deleted.
また、上記の制御装置11に係る各構成や当該各構成の機能及び実行処理等は、それらの一部又は全部をハードウェア(例えば各機能を実行するロジックを集積回路で設計する等)で実現しても良い。また、上記の制御装置11に係る構成は、演算処理装置(例えばCPU)によって読み出し・実行されることで当該制御装置の構成に係る各機能が実現されるプログラム(ソフトウェア)としてもよい。当該プログラムに係る情報は、例えば、半導体メモリ(フラッシュメモリ、SSD等)、磁気記憶装置(ハードディスクドライブ等)及び記録媒体(磁気ディスク、光ディスク等)等に記憶することができる。
In addition, each configuration related to the
また、上記の実施の形態の説明では、制御線や情報線は、当該実施の形態の説明に必要であると解されるものを示したが、必ずしも製品に係る全ての制御線や情報線を示しているとは限らない。実際には殆ど全ての構成が相互に接続されていると考えて良い。 In the description of the above embodiment, the control line and the information line are shown to be understood as necessary for the description of the embodiment. However, all the control lines and information lines related to the product are not necessarily included. It is not necessarily shown. In practice, it can be considered that almost all the components are connected to each other.
9…水中検査装置(水中移動体)、11…制御装置、18…圧力センサ(垂直位置検出器)、19…慣性センサ部(姿勢検出器)、20…3軸ジャイロ、21…傾斜計、22…地磁気センサ、23…レンジセンサユニット(相対距離検出器)、24a…レーザセンサ、24b…レーザセンサ、24d…超音波アレイセンサ、34…画像記憶部、35…画像選択部、35a…鏡像処理部、36…測定画像算出部、37…対応部分特定部、38…水平位置算出部、42…画像修正部、110…測定画像表示部、115…記憶画像表示部
DESCRIPTION OF SYMBOLS 9 ... Underwater inspection apparatus (underwater moving body), 11 ... Control apparatus, 18 ... Pressure sensor (vertical position detector), 19 ... Inertial sensor part (attitude detector), 20 ... 3-axis gyro, 21 ... Inclinometer, 22 ... Geomagnetic sensor, 23 ... Range sensor unit (relative distance detector), 24a ... Laser sensor, 24b ... Laser sensor, 24d ... Ultrasonic array sensor, 34 ... Image storage unit, 35 ... Image selection unit, 35a ... Mirror image processing unit 36 ... Measured
Claims (10)
構造物の設計情報に基づいて作成された或る平面上の画像データであって、当該或る平面上での前記構造物の外形と、当該構造物の外形を構成する線を基準とした当該構造物の外形の鏡像とが、位置情報と関連付けて表された画像データが記憶された記憶装置と、
前記或る平面上において前記水中移動体の周囲を距離センサで走査することで得られる画像データであって、前記或る平面における前記構造物の外形が表された測定画像を取得する画像取得部と、
前記記憶装置に記憶された前記画像データと前記画像取得部で取得された前記測定画像との対応関係と、前記記憶装置に記憶された前記画像データに付された位置情報とに基づいて、前記或る平面上における前記水中移動体の位置を算出する位置算出部と
を備えることを特徴とする水中移動体の位置検知装置。 An underwater vehicle capable of moving in a three-dimensional space;
It is image data on a certain plane created based on the design information of the structure, and is based on the outline of the structure on the certain plane and the lines constituting the outline of the structure. A storage device that stores image data in which a mirror image of the outer shape of the structure is associated with position information;
An image acquisition unit that acquires image data obtained by scanning the underwater moving body on the certain plane with a distance sensor, and representing an outer shape of the structure on the certain plane. When,
Based on the correspondence between the image data stored in the storage device and the measurement image acquired by the image acquisition unit, and the position information attached to the image data stored in the storage device, A position detection unit that calculates a position of the underwater moving body on a certain plane.
前記記憶装置には、前記構造物の設計情報に基づいて作成される複数の画像データであって、前記3次元空間内で互いに異なる複数の平面上における前記構造物の外形が位置情報と関連付けて表された複数の記憶画像が記憶されており、
当該複数の記憶画像の中から前記水中移動体の位置情報を取得するために利用される記憶画像を、前記水中移動体の姿勢および垂直位置に基づいて選択し、当該選択された記憶画像を選択画像とする画像選択部と、
当該選択画像中の前記構造物の外形を構成する線を基準とした当該外形の鏡像を当該選択画像に付加する鏡像処理部とをさらに備え、
前記画像取得部は、前記3次元空間で前記水中移動体の位置する平面上において当該水中移動体の周囲を前記距離センサで走査することで得られる画像データであって、当該平面上における前記構造物の外形が表された測定画像を取得し、
前記位置算出部は、前記鏡像処理部で前記鏡像が付加された前記選択画像と前記画像取得部で取得された前記測定画像の対応関係と、前記選択画像に付された位置情報とに基づいて、前記水中移動体の位置する平面における当該水中移動体の位置を算出すること
を特徴とする水中移動体の位置検知装置。 In the position detection apparatus of the underwater mobile object according to claim 1,
The storage device includes a plurality of pieces of image data created based on the design information of the structure, wherein the outer shape of the structure on a plurality of different planes in the three-dimensional space is associated with position information. A plurality of stored images are stored,
A stored image used for acquiring the position information of the underwater moving body is selected from the plurality of stored images based on the posture and vertical position of the underwater moving body, and the selected stored image is selected. An image selection unit as an image;
A mirror image processing unit for adding a mirror image of the outer shape with reference to a line constituting the outer shape of the structure in the selected image to the selected image;
The image acquisition unit is image data obtained by scanning the periphery of the underwater moving body with the distance sensor on a plane on which the underwater moving body is positioned in the three-dimensional space, and the structure on the plane Get a measurement image showing the outline of the object,
The position calculation unit is based on a correspondence relationship between the selected image to which the mirror image is added by the mirror image processing unit and the measurement image acquired by the image acquisition unit, and position information attached to the selected image. A position detection device for an underwater moving body, wherein the position of the underwater moving body in a plane on which the underwater moving body is positioned is calculated.
前記記憶装置に記憶された前記画像データ中の前記構造物の外形は、複数の直線を組み合わせて規定されていることを特徴とする水中移動体の位置検知装置。 In the position detection apparatus of the underwater mobile object according to claim 1,
An underwater moving body position detection device, wherein an outer shape of the structure in the image data stored in the storage device is defined by combining a plurality of straight lines.
前記距離センサは、超音波センサであることを特徴とする水中移動体の位置検知装置。 In the position detection apparatus of the underwater mobile object according to claim 1,
The position sensor of an underwater moving body, wherein the distance sensor is an ultrasonic sensor.
前記距離センサは、超音波センサとレーザセンサであることを特徴とする水中移動体の位置検知装置。 In the position detection apparatus of the underwater mobile object according to claim 1,
The distance sensor is an ultrasonic sensor and a laser sensor.
前記位置算出部で互いの対応関係が考慮される前に、前記記憶装置に記憶された前記画像データと、前記画像取得部で取得された前記測定画像とをそれぞれ簡略化することで修正する画像修正部をさらに備えることを特徴とする水中移動体の位置検知装置。 In the position detection apparatus of the underwater mobile object according to claim 1,
An image to be corrected by simplifying each of the image data stored in the storage device and the measurement image acquired by the image acquisition unit before the position calculation unit considers the corresponding relationship A position detecting device for an underwater vehicle, further comprising a correction unit.
前記画像修正部は、
前記記憶装置に記憶された前記画像データと前記画像取得部で取得された前記測定画像との各画素を拡大する膨張処理部と、
前記膨張処理部の出力画像の各画素を縮小する縮小処理部と、
前記縮小処理部の出力画像の構造物の外形を分類するクラスタリング処理部と、
前記クラスタリング処理部の出力画像の各クラスタの面積を算出するクラスタ面積算出処理部と、
前記クラスタ面積算出処理部で算出された複数のクラスタの面積のうち、予め設定した閾値以下の面積のクラスタを前記クラスタリング処理部の出力画像から削除することで前記記憶装置に記憶された前記画像データと前記画像取得部で取得された前記測定画像を修正する画像更新部とを備えることを特徴とする水中移動体の位置検知装置。 In the position detection device of the underwater mobile object according to claim 6,
The image correction unit
An expansion processing unit for enlarging each pixel of the image data stored in the storage device and the measurement image acquired by the image acquisition unit ;
A reduction processing unit for reducing each pixel of the output image of the expansion processing unit;
A clustering processing unit for classifying the outer shape of the structure of the output image of the reduction processing unit;
A cluster area calculation processing unit for calculating the area of each cluster of the output image of the clustering processing unit;
The image data stored in the storage device by deleting, from the output image of the clustering processing unit, a cluster having an area equal to or smaller than a preset threshold among the areas of the plurality of clusters calculated by the cluster area calculating processing unit. And an image updating unit for correcting the measurement image acquired by the image acquisition unit .
前記水中移動体の垂直位置を算出するために、水中における前記水中移動体の深度を検出する圧力センサをさらに備えることを特徴とする水中移動体の位置検知装置。 In the position detection apparatus of the underwater mobile object according to claim 2,
In order to calculate the vertical position of the underwater moving body, the underwater moving body position detection apparatus further includes a pressure sensor that detects a depth of the underwater moving body in water.
前記記憶装置に記憶され前記鏡像を含む前記画像データと、前記画像取得部による前記測定画像とが表示される表示装置をさらに備えることを特徴とする水中移動体の位置検知装置。 In the position detection apparatus of the underwater mobile object according to claim 1,
An underwater moving body position detection device, further comprising: a display device configured to display the image data stored in the storage device and including the mirror image, and the measurement image obtained by the image acquisition unit.
当該記憶画像中の前記構造物の外形を構成する線を基準とした当該構造物の外形の鏡像を作成し、当該鏡像を当該記憶画像に付加するステップと、
前記或る平面上において、水中移動体から当該水中移動体の周囲に存在する前記構造物までの距離を計測することで、前記或る平面上における前記構造物の外形が表された測定画像を取得するステップと、
前記鏡像が付加された前記記憶画像と前記測定画像との対応関係と、前記鏡像が付加された前記記憶画像に付された位置情報とに基づいて、前記或る平面上における前記水中移動体の位置を算出するステップと
を備えることを特徴とする水中移動体の位置検知方法。 Creating image data created based on the design information of the structure, wherein the outer shape of the structure on a certain plane is represented in association with the position information;
Creating a mirror image of the outer shape of the structure with reference to lines constituting the outer shape of the structure in the stored image, and adding the mirror image to the stored image;
By measuring the distance from the underwater moving body to the structure existing around the underwater moving body on the certain plane, a measurement image showing the outer shape of the structure on the certain plane is obtained. A step to obtain,
Based on the correspondence between the stored image to which the mirror image is added and the measurement image and the positional information attached to the stored image to which the mirror image is added, the underwater moving object on the certain plane A method for detecting the position of an underwater vehicle, comprising: calculating a position.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014054921A JP6185866B2 (en) | 2014-03-18 | 2014-03-18 | Position detecting device and position detecting method for underwater moving body |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014054921A JP6185866B2 (en) | 2014-03-18 | 2014-03-18 | Position detecting device and position detecting method for underwater moving body |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015175831A JP2015175831A (en) | 2015-10-05 |
| JP2015175831A5 JP2015175831A5 (en) | 2016-09-15 |
| JP6185866B2 true JP6185866B2 (en) | 2017-08-23 |
Family
ID=54255127
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014054921A Active JP6185866B2 (en) | 2014-03-18 | 2014-03-18 | Position detecting device and position detecting method for underwater moving body |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6185866B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6904895B2 (en) * | 2017-12-08 | 2021-07-21 | 日立Geニュークリア・エナジー株式会社 | Position estimation device and position estimation method |
| CN109669186B (en) * | 2018-12-24 | 2024-01-23 | 中国船舶重工集团公司第七一0研究所 | Acoustic-magnetic combined measurement system and method for underwater navigation body |
| CN109764927B (en) * | 2019-03-14 | 2023-12-19 | 长沙学院 | Float type intelligent solution depth measuring device and measuring method |
| CN110533650B (en) * | 2019-08-28 | 2022-12-13 | 哈尔滨工程大学 | AUV underwater pipeline detection tracking method based on vision |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6646593B1 (en) * | 2002-01-08 | 2003-11-11 | Science Applications International Corporation | Process for mapping multiple-bounce ghosting artifacts from radar imaging data |
| JP2009244234A (en) * | 2008-03-31 | 2009-10-22 | New Industry Research Organization | Ultrasonic array sensor and signal processing method |
| JP5054718B2 (en) * | 2009-03-03 | 2012-10-24 | 日立Geニュークリア・エナジー株式会社 | Position detecting device and position detecting method for underwater moving body |
| DE102010047051A1 (en) * | 2010-09-29 | 2012-03-29 | Carl Zeiss Sms Gmbh | Method for determining the position of a structure within an image and position measuring device for carrying out the method |
-
2014
- 2014-03-18 JP JP2014054921A patent/JP6185866B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015175831A (en) | 2015-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5054718B2 (en) | Position detecting device and position detecting method for underwater moving body | |
| JP4691581B2 (en) | Underwater moving object position detection device | |
| AU2014247986B2 (en) | Underwater platform with lidar and related methods | |
| JP6192938B2 (en) | 3D synthesis processing system and 3D synthesis processing method | |
| JP5303873B2 (en) | Vehicle shape measuring method and apparatus | |
| KR101888171B1 (en) | Method and device for recognizing environment based on position information of unmanned surface vessel | |
| JP6185866B2 (en) | Position detecting device and position detecting method for underwater moving body | |
| JPWO2017119202A1 (en) | Structure identifying device and method for structure | |
| JP2019128175A (en) | Tunnel wall inspection device and tunnel wall inspection program | |
| Wang et al. | Acoustic camera-based pose graph slam for dense 3-d mapping in underwater environments | |
| Singh et al. | Improved 2D laser grid mapping by solving mirror reflection uncertainty in SLAM | |
| CN113116386A (en) | Ultrasound imaging guidance method, ultrasound apparatus, and storage medium | |
| JP6904895B2 (en) | Position estimation device and position estimation method | |
| JP6163391B2 (en) | Underwater moving object position detection device | |
| EP1840507B1 (en) | Method and integrated system for the digital survey of three-dimensional environments. | |
| EP0681230A1 (en) | Navigation system | |
| JP6485616B2 (en) | Appearance measurement system, image processing method, and program | |
| JP6230923B2 (en) | Position detecting device and position detecting method for underwater moving body | |
| JP2010197268A (en) | Three-dimensional ultrasonic flaw detector and three-dimensional ultrasonic flaw detection method | |
| JP6580741B1 (en) | Position detection system and position detection method | |
| WO2023276567A1 (en) | Image processing device, image processing method, and program | |
| Kobayashi et al. | Development of hovering control system for an underwater vehicle to perform core internal inspections | |
| JP4855547B1 (en) | Method for analyzing the configuration of stereotyped bodies | |
| Blaer et al. | Two stage view planning for large-scale site modeling | |
| Constantinou et al. | An underwater laser vision system for relative 3-D posture estimation to mesh-like targets |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160727 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160727 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170417 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170509 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170630 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170718 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170728 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6185866 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |