JP6091913B2 - 生体シミュレーションプログラム、生体シミュレーション方法及び生体シミュレーション装置 - Google Patents
生体シミュレーションプログラム、生体シミュレーション方法及び生体シミュレーション装置 Download PDFInfo
- Publication number
- JP6091913B2 JP6091913B2 JP2013017680A JP2013017680A JP6091913B2 JP 6091913 B2 JP6091913 B2 JP 6091913B2 JP 2013017680 A JP2013017680 A JP 2013017680A JP 2013017680 A JP2013017680 A JP 2013017680A JP 6091913 B2 JP6091913 B2 JP 6091913B2
- Authority
- JP
- Japan
- Prior art keywords
- model
- displacement
- sarcomere
- calculated
- cell
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16B—BIOINFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR GENETIC OR PROTEIN-RELATED DATA PROCESSING IN COMPUTATIONAL MOLECULAR BIOLOGY
- G16B5/00—ICT specially adapted for modelling or simulations in systems biology, e.g. gene-regulatory networks, protein interaction networks or metabolic networks
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/50—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for simulation or modelling of medical disorders
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Public Health (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Computational Biology (AREA)
- Physiology (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Theoretical Computer Science (AREA)
- Biomedical Technology (AREA)
- Data Mining & Analysis (AREA)
- Biotechnology (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Investigating Or Analysing Biological Materials (AREA)
Description

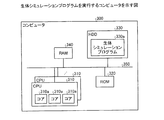
また、上記の実施例で説明した生体シミュレーション装置(10、20)の各種の処理は、あらかじめ用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータシステムで実行することによって実現することもできる。そこで、以下では、図11を用いて、上記の実施例で説明した生体シミュレーション装置と同様の機能を有するプログラムを実行するコンピュータの一例を説明する。図11は、生体シミュレーションプログラムを実行するコンピュータを示す図である。
13a マクロモデル
13b メゾモデル
13c ミクロモデル
14a マクロ処理部
14b メゾ・ミクロ処理部
15a 計算部
15b 第1の計算部
15c 第2の計算部
15d 第1の更新部
15e 第2の更新部
Claims (8)
- コンピュータに、
生体の心臓の細胞に含まれるサルコメアのモデルの収縮力を算出し、算出した前記収縮力と、前記細胞のモデルにかかる圧力を含む情報とに基づいて、前記サルコメアのモデルの変位を算出し、
算出した前記サルコメアのモデルの変位に基づいて、前記細胞のモデルの変位を算出するとともに、算出した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新し、
算出した前記細胞のモデルの変位に基づいて、前記心臓のモデルの変位を算出し、
算出した前記心臓のモデルの変位に基づいて、前記細胞のモデルの変位を更新し、更新した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新する、
処理を実行させることを特徴とする生体シミュレーションプログラム。 - 前記心臓のモデルの変位を算出する処理は、算出した前記心臓のモデルの変位に基づいて、前記細胞のモデルにかかる圧力を含む情報を更新する、
ことを特徴する請求項1に記載の生体シミュレーションプログラム。 - コンピュータに、
生体の心臓の細胞に含まれるサルコメアのモデルの収縮力を算出し、算出した前記収縮力と、前記細胞のモデルにかかる圧力を含む情報とに基づいて、前記サルコメアのモデルの変位を算出し、
算出した前記サルコメアのモデルの変位に基づいて、前記心臓のモデルの変位を算出し、
算出した前記サルコメアのモデルの変位に基づいて、前記細胞のモデルの変位を算出し、
算出した前記心臓のモデルの変位に基づいて、前記細胞のモデルの変位を更新し、更新した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新する、
処理を実行させることを特徴とする生体シミュレーションプログラム。 - 前記心臓のモデルの変位を算出する処理と、前記細胞のモデルの変位を算出する処理とは、並列に実行させる、
ことを特徴する請求項3に記載の生体シミュレーションプログラム。 - コンピュータが、
生体の心臓の細胞に含まれるサルコメアのモデルの収縮力を算出し、算出した前記収縮力と、前記細胞のモデルにかかる圧力を含む情報とに基づいて、前記サルコメアのモデルの変位を算出し、
算出した前記サルコメアのモデルの変位に基づいて、前記細胞のモデルの変位を算出するとともに、算出した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新し、
算出した前記細胞のモデルの変位に基づいて、前記心臓のモデルの変位を算出し、
算出した前記心臓のモデルの変位に基づいて、前記細胞のモデルの変位を更新し、更新した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新する、
処理を実行することを特徴とする生体シミュレーション方法。 - コンピュータが、
生体の心臓の細胞に含まれるサルコメアのモデルの収縮力を算出し、算出した前記収縮力と、前記細胞のモデルにかかる圧力を含む情報とに基づいて、前記サルコメアのモデルの変位を算出し、
算出した前記サルコメアのモデルの変位に基づいて、前記心臓のモデルの変位を算出し、
算出した前記サルコメアのモデルの変位に基づいて、前記細胞のモデルの変位を算出し、
算出した前記心臓のモデルの変位に基づいて、前記細胞のモデルの変位を更新し、更新した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新する、
処理を実行することを特徴とする生体シミュレーション方法。 - 生体の心臓の細胞に含まれるサルコメアのモデルの収縮力を算出し、算出した前記収縮力と、前記細胞のモデルにかかる圧力を含む情報とに基づいて、前記サルコメアのモデルの変位を算出する第1算出部と、
算出した前記サルコメアのモデルの変位に基づいて、前記細胞のモデルの変位を算出するとともに、算出した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新する第1更新部と、
算出した前記細胞のモデルの変位に基づいて、前記心臓のモデルの変位を算出する第2算出部と、
算出した前記心臓のモデルの変位に基づいて、前記細胞のモデルの変位を更新し、更新した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新する第2更新部と、
を有することを特徴とする生体シミュレーション装置。 - 生体の心臓の細胞に含まれるサルコメアのモデルの収縮力を算出し、算出した前記収縮力と、前記細胞のモデルにかかる圧力を含む情報とに基づいて、前記サルコメアのモデルの変位を算出する第1算出部と、
算出した前記サルコメアのモデルの変位に基づいて、前記心臓のモデルの変位を算出する第2算出部と、
算出した前記サルコメアのモデルの変位に基づいて、前記細胞のモデルの変位を算出する第3算出部と、
算出した前記心臓のモデルの変位に基づいて、前記細胞のモデルの変位を更新し、更新した前記細胞のモデルの変位に基づいて、前記サルコメアのモデルの変位を更新する更新部と、
を有することを特徴とする生体シミュレーション装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013017680A JP6091913B2 (ja) | 2013-01-31 | 2013-01-31 | 生体シミュレーションプログラム、生体シミュレーション方法及び生体シミュレーション装置 |
| EP14152473.6A EP2763067B1 (en) | 2013-01-31 | 2014-01-24 | Biological simulation program, biological simulation method, and biological simulation device |
| US14/164,717 US20140214390A1 (en) | 2013-01-31 | 2014-01-27 | Biological simulation method and biological simulation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013017680A JP6091913B2 (ja) | 2013-01-31 | 2013-01-31 | 生体シミュレーションプログラム、生体シミュレーション方法及び生体シミュレーション装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014149648A JP2014149648A (ja) | 2014-08-21 |
| JP6091913B2 true JP6091913B2 (ja) | 2017-03-08 |
Family
ID=50101688
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013017680A Active JP6091913B2 (ja) | 2013-01-31 | 2013-01-31 | 生体シミュレーションプログラム、生体シミュレーション方法及び生体シミュレーション装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20140214390A1 (ja) |
| EP (1) | EP2763067B1 (ja) |
| JP (1) | JP6091913B2 (ja) |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2441078B (en) * | 2003-08-22 | 2008-04-30 | Dennis Sunga Fernandez | Implantable network biosensor and system for diagnosis and therapy |
| JPWO2005083615A1 (ja) * | 2004-02-26 | 2007-11-29 | 国立大学法人京都大学 | 生体シミュレーション装置およびプログラム |
| WO2008047766A1 (en) * | 2006-10-17 | 2008-04-24 | Shoji Yamamoto | Cardiac performance simulation system, cardiac performance simulation method, cardiac performance simulation program and composite material sheet |
| US8718944B2 (en) * | 2007-05-22 | 2014-05-06 | Worcester Polytechnic Institute | Patient-specific image-based computational modeling and techniques for human heart surgery optimization |
-
2013
- 2013-01-31 JP JP2013017680A patent/JP6091913B2/ja active Active
-
2014
- 2014-01-24 EP EP14152473.6A patent/EP2763067B1/en active Active
- 2014-01-27 US US14/164,717 patent/US20140214390A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP2763067A2 (en) | 2014-08-06 |
| EP2763067B1 (en) | 2019-04-24 |
| JP2014149648A (ja) | 2014-08-21 |
| US20140214390A1 (en) | 2014-07-31 |
| EP2763067A3 (en) | 2015-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Wang et al. | A massively parallel and scalable multi-GPU material point method | |
| Anderson et al. | Massively parallel Monte Carlo for many-particle simulations on GPUs | |
| Brown et al. | Implementing molecular dynamics on hybrid high performance computers–Particle–particle particle-mesh | |
| US20130226535A1 (en) | Concurrent simulation system using graphic processing units (gpu) and method thereof | |
| Kang et al. | Colorectal tumour simulation using agent based modelling and high performance computing | |
| Jorge et al. | A CPU‐FPGA heterogeneous approach for biological sequence comparison using high‐level synthesis | |
| Alberts et al. | Data-parallel techniques for simulating a mega-scale agent-based model of systemic inflammatory response syndrome on graphics processing units | |
| JP6091913B2 (ja) | 生体シミュレーションプログラム、生体シミュレーション方法及び生体シミュレーション装置 | |
| Allen et al. | An efficient method for stochastic simulation of biological populations in continuous time | |
| Bisset et al. | High-performance biocomputing for simulating the spread of contagion over large contact networks | |
| CN113711208A (zh) | 多处理建模器和模拟器 | |
| Iturriaga et al. | Solving very large optimization problems (up to one billion variables) with a parallel evolutionary algorithm in CPU and GPU | |
| Mizera et al. | GPU-accelerated steady-state computation of large probabilistic Boolean networks | |
| Tennyson et al. | MPI+ OpenCL implementation of a phase-field method incorporating CALPHAD description of Gibbs energies on heterogeneous computing platforms | |
| Gouvêa de Barros et al. | Simulations of Complex and Microscopic Models of Cardiac Electrophysiology Powered by Multi‐GPU Platforms | |
| Thiagarajan et al. | The feasibility of genome-scale biological network inference using graphics processing units | |
| Jeannin-Girardon et al. | A software architecture for multi-cellular system simulations on graphics processing units | |
| Jiang et al. | Accelerating genome-wide association studies using cuda compatible graphics processing units | |
| Ganellari et al. | Fast many-core solvers for the Eikonal equations in cardiovascular simulations | |
| Higham et al. | Large speed increase using novel GPU based algorithms to simulate cardiac excitation waves in 3D rabbit ventricles | |
| Mengesha | Beyond the Classical Grid: A Critical Review of Emerging Finite Element Methodologies in Structural Engineering-From AI-Enhanced Solvers to Isogeometric, Discontinuous, and Phase-Field Paradigms | |
| Tordini et al. | NuChart-II: A Graph-Based Approach for Analysis and Interpretation of Hi-C Data | |
| Alias et al. | High speed computation of muscle stress problem using crack propagation modelling on DPCs platform | |
| Sabou et al. | Particle based modelling and processing of high resolution and large textile surfaces | |
| Xavier et al. | Use of multiple gpus to speedup the execution of a three-dimensional computational model of the innate immune system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161025 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170208 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6091913 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |