JP5934865B2 - 反復動作のパラメータをリアルタイムに決定するシステムおよび方法 - Google Patents
反復動作のパラメータをリアルタイムに決定するシステムおよび方法 Download PDFInfo
- Publication number
- JP5934865B2 JP5934865B2 JP2012552396A JP2012552396A JP5934865B2 JP 5934865 B2 JP5934865 B2 JP 5934865B2 JP 2012552396 A JP2012552396 A JP 2012552396A JP 2012552396 A JP2012552396 A JP 2012552396A JP 5934865 B2 JP5934865 B2 JP 5934865B2
- Authority
- JP
- Japan
- Prior art keywords
- period
- motion
- repetitive
- sliding window
- estimating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F15/00—Digital computers in general; Data processing equipment in general
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
- G06V40/23—Recognition of whole body movements, e.g. for sport training
- G06V40/25—Recognition of walking or running movements, e.g. gait recognition
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F2300/00—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game
- A63F2300/10—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game characterized by input arrangements for converting player-generated signals into game device control signals
- A63F2300/105—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game characterized by input arrangements for converting player-generated signals into game device control signals using inertial sensors, e.g. accelerometers, gyroscopes
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F2300/00—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game
- A63F2300/60—Methods for processing data by generating or executing the game program
- A63F2300/6045—Methods for processing data by generating or executing the game program for mapping control signals received from the input arrangement into game commands
Description
−現在の動作が終了する前に、前記動作を表す代表信号に基づいて、前記反復動作の周期の近似値を推定する第1の手段と、
−前記第1の推定手段により推定された前記周期に基づいてスライディングウィンドウのサイズを決定する手段と、
−スライディングウィンドウにより、前記動作を表す代表信号および前記第1の推定手段により得られたスライディングウィンドウの前記サイズに基づいて、前記動作パラメータを正確に推定する第2の手段と
を含むシステムを提案する。
−現在の動作が終了する前に、前記動作を表す代表信号に基づいて、前記反復動作の周期の近似値を推定するステップと、
−前記第1の推定手段により推定された前記周期に基づいてスライディングウィンドウのサイズを決定するステップと、
−スライディングウィンドウにより、前記動作を表す代表信号およびスライディングウィンドウの前記決定されたサイズに基づいて、前記動作パラメータを正確に推定するステップからなるステップを含む反復動作のパラメータをリアルタイムに決定する方法も提案する。
一実装モードによれば、前記信号は、例えば、少なくとも1個の磁力計、および/または少なくとも1個の加速度計、および/またはジャイロメータ、および/または圧力センサー、および/または心電計、および/または呼吸の量を測定する流量計、および/または呼吸の頻度を測定するセンサーを含む、反復動作を実行する要素に固定されたセンサーアセンブリにより送信される。

c(A,B)はAおよびBは相互相関関数である。
D=P−1CPである。
Pは新規フレームを定義するスイッチング行列、すなわち信号を新規フレーム内で適合させるべく修正可能にする行列である。固有値への分解により、行列Lだけでなくスイッチング行列Pの決定が可能になる。
について以下の式がある。
但し、
tは現在の時点瞬間を表し、
τは考慮するシフトを表し、
Itはtに依存する間隔を表す。
Tfは関心対象である時間ウィンドウのサイズを表し、従って遅延τの変動幅を[0;Tf[として定義する。
但し、αは重み付けウィンドウの時間的指標を表す。
Sは右足または左足の磁力計信号の和である。
フレームの変更の場合、S(t)=Mx(t)+My(t)+Mz(t)またはS(t)=Mu(t)+Mv(t)+Mw(t)である。
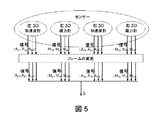
−足に装着された加速度計により送信されたX軸に沿った加速度の信号。
−可変ウィンドウサイズの、時間tおよびシフトτの関数としての相関関数。画像の最上部の黒いゾーンは、適合的に調整されたウィンドウのサイズに関連付けられている。本例では0.5秒〜1.7秒の間で変動する。
−本発明に従い、真の値との比較により適合的に推定された周期。
−固定ウィンドウサイズの時間tおよびシフトτの関数としての相関関数。
−真の値との比較により、固定ウィンドウで推定された2秒の周期。
Claims (16)
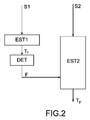
- 反復動作(PM,Tp)のパラメータをリアルタイムに決定するシステムであって、
−現在の動作が終了する前に、前記動作を表す代表信号(S1,S2)に基づいて、前記反復動作の周期の近似値(Tr)を推定する第1の手段(EST1)と、
−前記第1の推定手段(EST1)により推定された前記周期(Tr)に基づいてスライディングウィンドウのサイズ(F)を決定する手段(DET)と、
−スライディングウィンドウにより、前記動作を表す代表信号(S1,S2)および前記第1の推定手段(EST1)により得られたスライディングウィンドウの前記サイズ(F)に基づいて、前記動作パラメータを正確に推定する第2の手段(EST2)と
を含むことを特徴とするシステム。 - 前記動作パラメータ(PM)が、前記反復動作の周期(Tp)である、請求項1に記載のシステム。
- 前記第2の推定手段(EST2)が、相関に基づく計算手段を含んでいる、請求項2に記載のシステム。
- 前記周期(Tp)とは異なる前記反復動作の別の動作パラメータ(PM)を推定する前記第1の手段(EST1’)が、前記周期を正確に推定する前記第2の手段(EST2)を含んでいる、請求項2に記載のシステム。
- 前記決定手段(DET,DET’)が幾重もの安全性向上策を含んでいる、請求項1に記載のシステム。
- 前記動作の進行をリアルタイムに通信する通信インターフェースを含んでいる、請求項1に記載のシステム。
- 前記通信インターフェースが視聴覚インターフェースを含んでいる、請求項6に記載のシステム。
- 前記信号(S1、S2、S3、S)を配信するために、反復動作を実行している要素に固定すべく適合されたセンサーアセンブリを更に含んでいる、請求項1に記載のシステム。
- 前記センサーアセンブリが、少なくとも1個の磁力計、および/または少なくとも1個の加速度計、および/またはジャイロメータ、および/または圧力センサー、および/または心電計、および/または呼吸の量を測定する流量計、および/または呼吸の頻度を測定するセンサーを含んでいる、請求項8に記載のシステム。
- 反復動作のパラメータをリアルタイムに決定する方法であって、
−現在の動作が終了する前に、前記動作を表す代表信号(S,S1,S2,S3)に基づいて、前記反復動作の周期の近似値(Tr)を推定するステップと、
−前記近似的に推定された周期(Tr)に基づいてスライディングウィンドウのサイズ(F)を決定するステップと、
−スライディングウィンドウにより、前記動作を表す代表信号(S1)およびスライディングウィンドウの前記決定されたサイズ(F)に基づいて、前記動作パラメータ(PM)を正確に推定するステップとを含む方法。 - 前記反復動作の正確な周期(Tp)がリアルタイムに決定される、請求項10に記載の方法。
- 前記周期(Tp)とは異なる、前記反復動作の別の動作パラメータの推定が、前記周期を近似的に推定するステップにおいて、前記反復動作の周期を正確に推定するステップ(Tp)を用いる、請求項11に記載の方法。
- 前記信号(S1,S2,S3,S)が、前記反復動作を実行する要素に固定されたセンサーアセンブリにより送信される、請求項11に記載の方法。
- 前記センサーアセンブリにより送信される前記信号が、少なくとも1個の磁力計、および/または少なくとも1個の加速度計、および/またはジャイロメータ、および/または圧力センサー、および/または心電計、および/または呼吸の量を測定する流量計、および/または呼吸の頻度を測定するセンサーから生じる、請求項13に記載の方法。
- 第1の正規直交フレーム[X,Y,Z]を備えた前記センサーアセンブリにより送信された前記信号のフレームの変更が、減少する固有値λu、λvおよびλwへの分解を用いて、前記第1の正規直交フレーム[X,Y,Z]を自身の軸Uまたは軸UおよびVが各々前記動作の主軸または主面に対応する第2の正規直交フレーム[U,V,W]で表すことにより実行される、請求項13に記載の方法。
- 前記反復動作の前記正確な周期(Tp)のリアルタイムの前記決定が、前記スライディングウィンドウ上で、極大値および大域的最大値を検出し、前記極大値および大域的最大値は基本持続期間の倍数であって、前記正確な周期(Tp)に対応し、且つ最早に生じて前記大域的最大値に関する偏差がある閾値より小さい最大値を選択する、請求項11に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1050913A FR2956229B1 (fr) | 2010-02-10 | 2010-02-10 | Systeme et procede de determination en temps reel d'un parametre d'un mouvement de forme repetitive |
| FR1050913 | 2010-02-10 | ||
| PCT/EP2011/051961 WO2011098521A1 (fr) | 2010-02-10 | 2011-02-10 | Systeme et procede de determination en temps reel d'un parametre d'un mouvement de forme repetitive |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013527774A JP2013527774A (ja) | 2013-07-04 |
| JP5934865B2 true JP5934865B2 (ja) | 2016-06-15 |
Family
ID=42610922
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012552396A Expired - Fee Related JP5934865B2 (ja) | 2010-02-10 | 2011-02-10 | 反復動作のパラメータをリアルタイムに決定するシステムおよび方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9341645B2 (ja) |
| EP (1) | EP2534610A1 (ja) |
| JP (1) | JP5934865B2 (ja) |
| KR (1) | KR101700004B1 (ja) |
| CN (1) | CN102792315B (ja) |
| FR (1) | FR2956229B1 (ja) |
| WO (1) | WO2011098521A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10156907B2 (en) * | 2015-12-14 | 2018-12-18 | Invensense, Inc. | Device for analyzing the movement of a moving element and associated method |
| DE102019216189A1 (de) * | 2019-10-21 | 2021-04-22 | Robert Bosch Gmbh | Verfahren zum Verkehrsbetrieb einer mobilen Arbeitsmaschine in einem Verkehrsbereich aufweisend mindestens eine Zone mit Kollisionsgefahr mit weiteren mobilen Arbeitsmaschinen |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3592051B2 (ja) | 1997-10-03 | 2004-11-24 | 任天堂株式会社 | 歩数計 |
| GB9817834D0 (en) * | 1998-08-14 | 1998-10-14 | British Telecomm | Predicting avatar movement in a distributed virtual environment |
| US8956228B2 (en) | 1999-12-03 | 2015-02-17 | Nike, Inc. | Game pod |
| US6686716B1 (en) * | 2001-07-18 | 2004-02-03 | Itt Manufacturing Enterprises, Inc. | Tuned open-loop switched to closed-loop method for rapid point-to-point movement of a periodic motion control system |
| WO2005050565A1 (ja) * | 2003-11-20 | 2005-06-02 | Matsushita Electric Industrial Co., Ltd. | 移動物体検出装置及び移動物体検出方法 |
| ES2790885T3 (es) | 2005-03-29 | 2020-10-29 | Sportvu Ltd | Seguimiento de objetos en tiempo real y captura de movimiento en eventos deportivos |
| US8433592B2 (en) * | 2005-04-14 | 2013-04-30 | Avraham Y. Goldratt Institute, Lp | Method and system for determining buffer inventory size |
| WO2008011352A2 (en) * | 2006-07-16 | 2008-01-24 | The Jim Henson Company | System and method of animating a character through a single person performance |
| KR20090082711A (ko) | 2008-01-28 | 2009-07-31 | 삼성전자주식회사 | 보행자 항법 시스템에서의 보폭 추정 방법 및 시스템 |
| US8892345B2 (en) * | 2011-04-08 | 2014-11-18 | Here Global B.V. | Trend based predictive traffic |
-
2010
- 2010-02-10 FR FR1050913A patent/FR2956229B1/fr not_active Expired - Fee Related
-
2011
- 2011-02-10 EP EP11702651A patent/EP2534610A1/fr not_active Ceased
- 2011-02-10 US US13/578,539 patent/US9341645B2/en active Active
- 2011-02-10 JP JP2012552396A patent/JP5934865B2/ja not_active Expired - Fee Related
- 2011-02-10 CN CN201180009194.6A patent/CN102792315B/zh not_active Expired - Fee Related
- 2011-02-10 KR KR1020127020336A patent/KR101700004B1/ko active IP Right Grant
- 2011-02-10 WO PCT/EP2011/051961 patent/WO2011098521A1/fr active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| EP2534610A1 (fr) | 2012-12-19 |
| CN102792315A (zh) | 2012-11-21 |
| FR2956229B1 (fr) | 2016-02-19 |
| US20130073249A1 (en) | 2013-03-21 |
| WO2011098521A1 (fr) | 2011-08-18 |
| CN102792315B (zh) | 2018-03-06 |
| JP2013527774A (ja) | 2013-07-04 |
| KR101700004B1 (ko) | 2017-01-26 |
| FR2956229A1 (fr) | 2011-08-12 |
| KR20120128620A (ko) | 2012-11-27 |
| US9341645B2 (en) | 2016-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10751561B2 (en) | Systems and methods for controlling a self-paced treadmill using predicted subject velocity | |
| JP6313260B2 (ja) | ゴルフスイング中に一つまたは複数のスイングパラメータを測定するように構成されたコンピュータ可読命令を有する非一時的なコンピュータ可読媒体 | |
| CN102184009B (zh) | 跟踪系统中的手位置后处理精炼 | |
| US8475274B2 (en) | Method and apparatus for dynamically adjusting game or other simulation difficulty | |
| US9724604B2 (en) | Computer readable storage medium having game program stored thereon and game apparatus | |
| US20050076161A1 (en) | Input system and method | |
| EP2181740B1 (en) | Game apparatus and computer readable storage medium having game program stored thereon | |
| US20160354671A1 (en) | Golf shot detection | |
| US8974301B2 (en) | Computer readable storage medium having game program stored thereon and game apparatus | |
| JP2013535039A (ja) | 仮想世界処理装置及び方法 | |
| US8956229B2 (en) | Computer readable storage medium having game program stored thereon and game apparatus | |
| WO2015138148A1 (en) | Latency reduction in camera-projection systems | |
| US20100248824A1 (en) | Computer readable storage medium having game program stored thereon and game apparatus | |
| JP6054331B2 (ja) | ゴルフクラブ用の改善されたフィッティングシステム | |
| JP5934865B2 (ja) | 反復動作のパラメータをリアルタイムに決定するシステムおよび方法 | |
| US8979653B2 (en) | Computer readable storage medium having information processing program stored thereon and information processing apparatus | |
| Ben Brahem et al. | Use of a 3DOF accelerometer for foot tracking and gesture recognition in mobile HCI | |
| US20110208494A1 (en) | Method and system for simulating a handle's motion | |
| CN114296539B (zh) | 方向预测方法、虚拟实境装置及非暂态计算机可读取媒体 | |
| EP2140917B1 (en) | Orientation calculation apparatus and storage medium having orientation calculation program stored therein | |
| US9352230B1 (en) | Method and system for tracking motion-sensing device | |
| WO2024088778A1 (en) | Ball spin axis determination | |
| WO2024074410A1 (en) | Ball spin axis determination | |
| van Diest et al. | An exergame for balance training in older adults |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150512 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150812 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151008 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160209 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5934865 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |