JP5872894B2 - Robot motion teaching support apparatus and method - Google Patents
Robot motion teaching support apparatus and method Download PDFInfo
- Publication number
- JP5872894B2 JP5872894B2 JP2011288486A JP2011288486A JP5872894B2 JP 5872894 B2 JP5872894 B2 JP 5872894B2 JP 2011288486 A JP2011288486 A JP 2011288486A JP 2011288486 A JP2011288486 A JP 2011288486A JP 5872894 B2 JP5872894 B2 JP 5872894B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- teaching
- interference
- motion
- position information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 80
- 238000000034 method Methods 0.000 title claims description 22
- 230000002093 peripheral effect Effects 0.000 claims description 17
- 238000010977 unit operation Methods 0.000 claims 1
- 238000004519 manufacturing process Methods 0.000 description 19
- 230000006854 communication Effects 0.000 description 9
- 238000004891 communication Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000003860 storage Methods 0.000 description 3
- 230000007175 bidirectional communication Effects 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010422 painting Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images




Landscapes
- Numerical Control (AREA)
- Manipulator (AREA)
Description
本発明は、ロボットの例えば動作教示時に使用可能な動作教示支援装置及び教示支援方法に関する。 The present invention relates to a motion teaching support apparatus and a teaching support method that can be used, for example, during motion teaching of a robot.
例えば自動車製造工場等では、生産ラインには複数のロボットが設置され、自動車製造に関与している。近年では、生産設備の省スペース化及び生産性の効率化を図るため、生産ラインのロボット、及び、ワークや治具といったロボット周辺装置の配置は、密集化してきている。そのため、ロボット同士の配置間隔が狭くなり、またロボットと周辺装置との距離も接近、近接して配置されてきている。 For example, in an automobile manufacturing factory or the like, a plurality of robots are installed on a production line and are involved in automobile manufacturing. In recent years, in order to save space in production facilities and increase the efficiency of production, the arrangement of robots on production lines and robot peripheral devices such as workpieces and jigs have become denser. For this reason, the arrangement interval between the robots is narrowed, and the distance between the robot and the peripheral device is also approaching and close to each other.
一方、このようなロボットの動作は、ロボットコントローラにて制御される。一つのロボットコントローラには、一もしくは複数台のロボットが接続され、ロボットコントローラは、予め完成された動作プログラムに従い、ロボットの動作を制御する。このような動作プログラムに使用される、ロボットを動作させるための位置つまり教示位置は、例えば次のような方法で教示される。即ち、生産ラインに設置された実際のロボットに対して、例えばティーチングペンダントと呼ばれる教示装置を用いて教示作業者がロボットを教示位置まで動作させて、その位置情報を入力することで教示される。 On the other hand, the operation of such a robot is controlled by a robot controller. One or more robots are connected to one robot controller, and the robot controller controls the operation of the robot according to an operation program completed in advance. A position for operating the robot, that is, a teaching position used in such an operation program is taught by the following method, for example. That is, for an actual robot installed on the production line, a teaching worker moves the robot to a teaching position using a teaching device called a teaching pendant, for example, and inputs the position information.
一方、作成された動作プログラムが実行される実動作時におけるロボットの干渉防止を図るため、さらに干渉防止用の外部センサを用いる発明も提案されている(例えば特許文献1、2)。 On the other hand, inventions using an external sensor for preventing interference have also been proposed in order to prevent robot interference during actual operation in which the created operation program is executed (for example, Patent Documents 1 and 2).
さらにまた、上述のように生産ラインにてロボット等が密集配置される状況下では、実機にて教示作業を行うことは困難であることから、コンピュータ画面上に、生産ラインにおけるロボットを3次元的に表示させて、擬似的にロボット動作を再現するシミュレータが使用される場合が多い。このような擬似的に再現した空間領域にて、ロボットの侵入禁止領域を算出する発明もまた提案されている(例えば特許文献3)。 Furthermore, in the situation where robots and the like are densely arranged on the production line as described above, it is difficult to perform teaching work on the actual machine, so the robot on the production line is three-dimensionally displayed on the computer screen. In many cases, a simulator that reproduces the robot motion in a simulated manner is used. An invention has also been proposed in which a robot intrusion prohibited area is calculated in such a simulated spatial area (for example, Patent Document 3).
しかしながら、上述したような教示作業を行う場合、教示作業者の操作ミスは避けることができず、ロボット間の干渉などが発生する可能性がある。即ち、ロボットの教示作業の際には、一般的に教示作業者は、ロボットの手先(作業用のツールを取り付けている箇所)に注視して教示を行ってしまう傾向がある。そのため、ロボットの手先以外の例えば関節部分等には注意が行き届かず、隣接するロボットや周辺装置との干渉等が発生する可能性が生じる。 However, when performing the teaching work as described above, an operation error of the teaching worker cannot be avoided, and there is a possibility that interference between the robots may occur. That is, during the teaching work of the robot, the teaching worker generally tends to teach while paying attention to the hand of the robot (the place where the working tool is attached). For this reason, attention is not paid to, for example, a joint portion other than the hand of the robot, and there is a possibility that interference with an adjacent robot or a peripheral device may occur.
一旦、例えば周辺装置とロボットとが干渉し周辺装置が破損したような場合には、その修理時間及びコストが発生する。このような状況を避けるためには、ロボットを低速で動作させて教示作業を行う方法もあるが、教示作業に長時間を要するという問題が生じる。また、教示作業者は、干渉防止のため細心の注意を払って作業する必要があり、教示作業者への負担も大きい。 For example, if the peripheral device is damaged due to interference between the peripheral device and the robot, the repair time and cost are generated. In order to avoid such a situation, there is a method of performing the teaching work by operating the robot at a low speed, but there arises a problem that the teaching work takes a long time. In addition, the teaching worker needs to work with great care to prevent interference, and the burden on the teaching worker is large.
また、上記特許文献1、2の従来技術では、外部センサを使用する必要があり、装置構成が大きくなるという欠点がある。 Further, the prior arts of Patent Documents 1 and 2 have a drawback in that an external sensor needs to be used and the apparatus configuration becomes large.
また、上記特許文献3の発明は、ロボットの侵入禁止領域を算出するもので、物体同士が干渉するか否かを算出するものではない。よってこの場合も、干渉有無の確認が必要となり、やはり上述の教示プログラムの動作確認及び教示修正などの作業は、避けることができない。 Further, the invention of Patent Document 3 calculates a robot intrusion prohibition area, and does not calculate whether or not objects interfere with each other. Therefore, also in this case, it is necessary to confirm the presence / absence of interference, and the above-described operations such as operation check and teaching correction of the teaching program cannot be avoided.
本発明は、このような問題点を解決するためになされたもので、装置間の干渉防止を図ることができ、かつ該干渉防止のために要する作業を従来に比べて効率化することができる、ロボット動作教示支援装置及び方法を提供することを目的とする。 The present invention has been made to solve such a problem, and can prevent interference between apparatuses, and can make the work required for preventing the interference more efficient than before. An object of the present invention is to provide a robot motion teaching support apparatus and method.
上記目的を達成するため、本発明は以下のように構成する。
即ち、本発明の第1態様におけるロボット動作教示支援装置は、動作プログラムに従いロボットの動作を制御するロボットコントローラに接続されロボットの動作姿勢を画面表示するシミュレータを備え、上記動作プログラムの作成を支援するロボット動作教示支援装置であって、
上記ロボットコントローラは、ロボットの動作姿勢の将来位置を算出する将来位置算出部を有し、
上記シミュレータは、上記将来位置算出部から供給される将来位置でのロボットの動作姿勢を画面表示し、かつ将来位置での当該ロボットの干渉の有無を判断する干渉予知装置を有する、ことを特徴とする。
In order to achieve the above object, the present invention is configured as follows.
That is, the robot motion teaching support apparatus according to the first aspect of the present invention includes a simulator connected to a robot controller that controls the robot motion according to the motion program and displays the motion posture of the robot on the screen, and supports the creation of the motion program. A robot motion teaching support device,
The robot controller has a future position calculation unit for calculating the future position of the robot's motion posture,
The simulator has an interference prediction device that displays on the screen the robot's operation posture at the future position supplied from the future position calculation unit and determines whether or not there is interference of the robot at the future position. To do.
また、上記干渉予知装置は、干渉有の判断に従いロボットコントローラへロボットの動作停止を指示する動作停止部を有することもできる。 The interference prediction apparatus can also include an operation stop unit that instructs the robot controller to stop the operation of the robot in accordance with the determination that there is interference.
また、上記ロボットコントローラに接続されロボットの動作位置情報を入力する教示装置をさらに備え、
上記干渉予知装置は、ロボットにおける実際の作業環境と同じ位置関係でロボット及びロボット周辺装置を配置した3次元仮想空間を生成する仮想空間生成部を有し、この3次元仮想空間において上記将来位置でのロボットの動作姿勢を表示し、
上記干渉予知装置は、さらに、教示装置から入力される動作位置情報に伴い変化するロボットの将来位置における干渉の有無を上記3次元仮想空間において判断し、かつ上記教示装置に対して干渉箇所を表示させる教示装置用干渉表示部を有することもできる。
Further, the teaching device further includes a teaching device connected to the robot controller for inputting operation position information of the robot,
The interference prediction apparatus has a virtual space generation unit that generates a three-dimensional virtual space in which the robot and the robot peripheral devices are arranged in the same positional relationship as the actual work environment in the robot, and at the future position in the three-dimensional virtual space. Display the robot's movement posture,
The interference prediction apparatus further determines in the three-dimensional virtual space whether or not there is interference at a future position of the robot that changes in accordance with the operation position information input from the teaching apparatus, and displays the interference location on the teaching apparatus. It is also possible to have an interference display unit for a teaching device.
また、本発明の第2態様におけるロボット動作教示支援方法は、動作プログラムに従いロボットの動作を制御するロボットコントローラに接続されてロボットの動作姿勢を画面表示するシミュレータと、上記ロボットコントローラに接続されロボットの動作位置情報を入力する教示装置とを備えたロボット動作教示支援装置にて実行される、ロボットの動作プログラムの作成を支援するロボット動作教示支援方法であって、
上記ロボットコントローラは、ロボットの動作姿勢の将来位置を算出し、
上記シミュレータは、ロボットにおける実際の作業環境と同じ位置関係でロボット及びロボット周辺装置を配置した3次元仮想空間を生成し、この3次元仮想空間において上記将来位置でのロボットの動作姿勢を表示し、さらに、上記教示装置から入力される動作位置情報に伴い変化するロボットの将来位置での干渉の有無を上記3次元仮想空間において判断し、
干渉有のときには、上記シミュレータは、さらに、ロボットコントローラに対してロボットの動作停止を指示し、かつ干渉を回避可能な動作位置情報を入力するために上記教示装置へ干渉箇所を表示させることを特徴とする。
Further, the robot motion teaching support method according to the second aspect of the present invention includes a simulator that is connected to a robot controller that controls the motion of the robot according to the motion program and displays the motion posture of the robot on the screen, and a robot that is connected to the robot controller and A robot motion teaching support method for supporting creation of a robot motion program, which is executed by a robot motion teaching support device having a teaching device for inputting motion position information,
The robot controller calculates the future position of the robot's motion posture,
The simulator generates a three-dimensional virtual space in which the robot and the robot peripheral device are arranged in the same positional relationship as the actual work environment in the robot, and displays the robot's motion posture at the future position in the three-dimensional virtual space. Further, in the three-dimensional virtual space, the presence or absence of interference at the future position of the robot that changes with the operation position information input from the teaching device is determined.
When there is interference, the simulator further instructs the robot controller to stop the operation of the robot, and displays the interference location on the teaching device to input operation position information that can avoid the interference. And
本発明の第1態様におけるロボット動作教示支援装置、及び第2態様におけるロボット動作教示支援方法によれば、ロボットコントローラと接続するシミュレータを備え、該シミュレータによって、ロボットの動作姿勢の将来位置における干渉の有無を判断するように構成した。したがって、ロボット間、あるいはロボットとその周辺装置との間の干渉防止を図ることができ、かつ該干渉防止のために要する作業を従来に比べて効率化することができる。その結果、ロボットの動作プログラム設計者における負担を軽減することができ、教示作業の効率化及び時間短縮を図ることができる。また、生産ライン立ち上げ時間を短縮することもできる。 According to the robot motion teaching support apparatus in the first aspect of the present invention and the robot motion teaching support method in the second aspect, a simulator connected to the robot controller is provided, and the simulator prevents interference at a future position of the robot motion posture. It was configured to determine the presence or absence. Therefore, it is possible to prevent interference between the robots or between the robot and its peripheral devices, and the work required for preventing the interference can be made more efficient than before. As a result, the burden on the robot operation program designer can be reduced, and the efficiency and time of teaching work can be improved. In addition, the production line startup time can be shortened.
本発明の実施形態であるロボット動作教示支援装置及び方法について、図を参照しながら以下に説明する。尚、各図において、同一又は同様の構成部分については同じ符号を付している。 A robot motion teaching support apparatus and method according to an embodiment of the present invention will be described below with reference to the drawings. In each figure, the same or similar components are denoted by the same reference numerals.
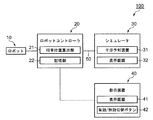
図1は、本実施形態におけるロボット動作教示支援装置100の構成をブロック図にて示している。また図3では、ロボット動作教示支援装置100の各構成部分を、具体的な一実施例の態様にて示している。
FIG. 1 is a block diagram showing the configuration of a robot motion
例えば、完成された生産ラインでは、この生産ラインに設置されたロボットは、予め作成された動作プログラムに従い動作制御されて自動的に動作する。ロボット動作教示支援装置100は、そのような動作プログラムを作成するときに使用されてロボット動作の教示を支援する装置である。
For example, in a completed production line, a robot installed in the production line is automatically controlled according to an operation program created in advance. The robot motion
このような本実施形態のロボット動作教示支援装置100は、基本的構成部分として、ロボットコントローラ20と、このロボットコントローラ20に接続されるシミュレータ30とを備える。ロボットコントローラ20は、上記動作プログラムに従いロボット10の動作を制御する装置であり、シミュレータ30は、ロボットコントローラ20に通信ネットワーク50を介して接続され、ロボットの動作姿勢つまりロボット各部の動きを表示画面32に表示するとともに詳細後述の動作を行う装置である。以下に、これらの各構成部分についてさらに詳しく説明する。
Such a robot motion
本実施形態において、ロボット10としては、生産ラインに配置される作業ロボットであり、一例として、自動車の製造ラインにおける溶接ロボットを例に採る。尚、図3では、一例として一台のロボット10のみを図示するが、通常、複数台のロボット10が配置され、これらのロボット10が一台もしくは複数台のロボットコントローラ20にて制御される。また、ロボット10は、勿論、上記溶接ロボットに限定されず、例えば塗装用ロボット、組立用ロボット等であっても良く、さらに生産ライン用ロボットのように固定設置されるロボットに限らず、搬送用ロボット(AGV)、さらにはポジショナ等であってもよい。
In the present embodiment, the
本実施形態において、ロボットコントローラ20は、ロボット10の動作姿勢の将来位置を算出する将来位置算出部21を有する。ロボットコントローラ20は、ロボット10の動作部分の一つである例えばアームの現在位置情報、及びこのアームに指定された移動速度情報を有することから、将来位置算出部21は、これらの情報から、指定時間後における当該アームの将来位置つまり将来の指令値を算出することができる。また、従来のロボットコントローラと同様に、ロボットコントローラ20は、上記動作プログラム等を格納する記憶部22も含む。
In the present embodiment, the
将来位置算出部21が、例えばアームの将来位置を算出する方法について説明する。まず、ロボット10における各関節毎に指令値を与えて動作させるモードである、ジョイント動作モードを例に取ると、将来の指令値はθ(t+1)=θ(t)+TΔθによって算出される。ここで、θはロボット10における各関節角度を成分とするベクトルであり、Δθは各関節角度の変化量である。Δθは各関節の角速度に制御周期時間を乗じることで求められる。Tはここでいう「将来」までの進み幅を仮想的に調整するためのパラメータであり、Tを大きな値とすると、より遠い将来の位置を算出できることになる。ジョイント動作モード以外のモード、即ち、ロボット10におけるベース座標系上で指令値を与えて動作させるモードであるベース座標系動作モードや、ロボット10におけるツール座標系上で指令値を与えて動作させるモードであるツール座標系動作モードの場合も、上記ジョイント動作モードの場合と同様に将来位置を算出することができる。
A method in which the future
このようなロボットコントローラ20は、図3に示すように、主としてコンピュータを用いて実現され、将来位置算出部21は、その機能に対応するソフトウェアと、これを実行するためのCPU(中央演算処理装置)等のハードウェアから構成されている。また、上記動作プログラムは、ロボットコントローラ20によって直接実行可能なものだけでなく、例えば通信線を介してロボットコントローラ20に読み込まれハードディスク等にインストールすることによって実行可能となるものも含む。又、圧縮されたり、暗号化されたりしたものも含まれる。
As shown in FIG. 3, such a
また、ロボットコントローラ20には、動作プログラムを作成するに際し教示作業者がロボット動作の教示を行うため、例えばロボットアームの移動先の位置情報を入力するための、例えばティーチングペンダントと呼ばれる、教示装置40も接続されている。教示作業時には、教示作業者は、教示装置40によってロボット10を操作する。
よって、ロボットコントローラ20における将来位置算出部21は、教示装置40からの入力値に応じて時々刻々変化する将来の指令値を算出する。
The
Therefore, the future
従来のシミュレータは、実際の生産ラインを組み立てる前の段階、つまり画面上で仮想的にロボットを配置した仮の生産ラインにおけるロボットの大まかな動作を実行、検証するために使用される装置である。
これに対して本実施形態に含まれるシミュレータ30は、このような従来の使用方法のみならず、上述のように通信ネットワーク50にてロボットコントローラ20と接続され、完成状態に近い状態における生産ラインの状況を表示画面32上でシミュレーションする装置であり、干渉予知装置31を有している。尚、シミュレータ30とロボットコントローラ20とは、図示のように別物で構成されてもよいし、ロボットコントローラ20の機能を実行するソフトウェア(プログラム)と、シミュレータ30の機能を実行するソフトウェア(プログラム)とが一つのコンピュータに格納された構成を採ることもできる。
A conventional simulator is an apparatus used for executing and verifying a rough operation of a robot in a stage before an actual production line is assembled, that is, a temporary production line in which a robot is virtually arranged on a screen.
On the other hand, the
上記干渉予知装置31は、ロボットコントローラ20の将来位置算出部21から供給される将来位置(将来の指令値)でのロボット10の動作姿勢を表示画面32に表示し、かつ将来位置での当該ロボット10の干渉の有無を判断する装置である。ここでロボット10の干渉とは、複数のロボット10同士の例えばアーム同士が当接する場合や、あるいはワークや治具といった周辺装置と、例えばアームとが当接する場合等を意味する。
The
また、上述のようにロボットコントローラ20には教示装置40が接続されていることから、シミュレータ30は、教示装置40との間でも双方向の通信を行う。よって、教示装置40から入力された位置情報に応じて、シミュレータ30は、ロボット10の動作姿勢を表示画面32に表示することができる。一方、図3に示すように、教示装置40は、表示画面41を有することから、上記双方向通信により表示画面41には、シミュレータ30における表示画面32と同じ画像を表示することができる。
よって、シミュレータ30の干渉予知装置31にて上記将来位置での干渉有が判断されたときには、干渉予知装置31は、ロボットコントローラ20へロボット10の動作停止を指示する。そして教示作業者は、干渉回避のための修正位置情報を教示装置40から入力することができる。
Since the
Therefore, when the
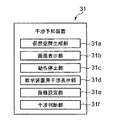
このような干渉予知装置31は、本実施形態では図2に示すように、説明の便宜上、機能動作部分として、仮想空間生成部31a、画面表示部31b、動作停止部31c、教示装置用干渉表示部31d、距離設定部31e、及び干渉判断部31fを有する。
In the present embodiment, as shown in FIG. 2, such an
このようなシミュレータ30は、図3に示すように実際にはパーソナルコンピュータを用いて実現され、仮想空間生成部31a、画面表示部31b、動作停止部31c、教示装置用干渉表示部31d、距離設定部31e、及び干渉判断部31fは、それぞれの機能に対応するソフトウェアと、これを実行するためのCPUやメモリ等のハードウェアから構成されている。
尚、仮想空間生成部31a等の各機能動作部分の詳しい機能については、下記の当該ロボット動作教示支援装置100の動作説明部分にて説明を行う。
Such a
The detailed functions of each functional operation part such as the virtual
以上のように構成される本実施形態のロボット動作教示支援装置100における動作、つまりロボット動作教示支援方法について、さらに図4から図6も参照して以下に説明する。
The operation in the robot operation teaching
上述のように、ロボットコントローラ20、シミュレータ30、及び教示装置40は互いに通信ネットワーク50を介して接続されており、ロボット動作教示支援装置100の大まかな動作としては、図4を参照して次のようになる。
即ち、ロボット10における、教示しようとする教示位置について、教示作業者は、当該動作に関するロボット10の位置情報を教示装置40から入力する(ステップS1)。次に、ロボットコントローラ20の将来位置算出部21は、入力された位置情報に応じて将来位置(将来の指令値)を算出し(ステップS2)、算出した将来の指令値をシミュレータ30の干渉予知装置31へ送信する。そして干渉予知装置31は、ロボット10の将来位置における、ロボット間や周辺装置との干渉の有無を判断する(ステップS3)。ステップS3にて、将来位置において干渉有りと判断されたときには、干渉予知装置31からロボットコントローラ20へ停止信号が送信され、ロボットコントローラ20は、ロボット10の動作を停止させる(ステップS4)。よって、ロボット10における実際の干渉は、未然に防止される。また、予知された将来位置での干渉を回避するため、再度ステップ1へ戻り、教示作業者は、教示装置40から修正位置情報を入力することができ、シミュレータ30は、修正位置情報に応じて再び将来位置での干渉の有無を判断する。
尚、以下で説明するが、図4ではステップS0にて3次元空間を生成する旨を示しているが、該動作は、必須の動作ではない。
As described above, the
That is, for the teaching position to be taught in the
As will be described below, FIG. 4 shows that a three-dimensional space is generated in step S0, but this operation is not an essential operation.
より詳しくロボット動作教示支援装置100の動作について説明する。
ロボット10に対する教示作業を行っている教示作業者において、上述した干渉の有無が容易に認識できるように、シミュレータ30の干渉予知装置31は、まず、実際の作業環境と同じ位置関係となるようにロボット10、上記周辺装置等を配置設定した3次元仮想空間を構築する(図4、ステップS0)。この動作は、入力された実際の作業環境の情報を用いて、図2に示す干渉予知装置31の仮想空間生成部31aで実行され、構築される3次元仮想空間は、実際のロボット10及び周辺装置等に則したモデルとなる。構築された3次元仮想空間モデルは、干渉予知装置31の画面表示部31b(図2)によって、シミュレータ30の表示画面32へ表示される。表示された3次元仮想空間モデルの一例を図5に示す。
The operation of the robot operation teaching
First, the
上述のように教示作業者は、教示装置40を用いてロボット10の動作位置及び姿勢を指示する(図4、ステップS1)。この動作姿勢の入力作業に応じて、一もしくは複数台のロボットコントローラ20の将来位置算出部21は、将来の指令値を算出し(図4、ステップS2)、通信ネットワーク50を介してシミュレータ30の干渉予知装置31へ送信する。ここで上記将来の指令値は、実時刻よりも例えば数百m秒〜数秒先の時刻における指令値であり、将来位置算出部21は、上述の範囲内の一つの時刻を任意に設定可能である。
As described above, the teaching worker instructs the operation position and posture of the
供給される将来の指令値に応じて、干渉予知装置31は、ロボット10同士、及びロボット10と周辺装置との間の干渉の有無をチェックする(図4、ステップS3)。この動作は、図2に示す干渉予知装置31の干渉判断部31fで実行される。また、この動作と並行して、画面表示部31bは、将来の指令値に従い、3次元仮想空間モデル内におけるロボット10の動作姿勢の表示を逐次変化させる。既に説明したように、教示作業者が教示装置40を用いてロボット10を操作することにより、将来の指令値は時々刻々変化する。よって干渉予知装置31においては、ある時点での将来の指令値に基づいて3次元仮想空間内のロボット10の姿勢を決定し、干渉の有無をチェックする。
In accordance with the supplied future command value, the
干渉予知装置31での干渉チェックの結果、干渉が無い場合には、ロボット10は、教示作業者の指示に従って動作する。そして、ロボット10が、教示しようとする場所に移動後、ロボットコントローラ20に対する教示装置40からの記憶指示に基づいて、そのときのロボット10の位置情報が記憶部22に取り込まれて、教示が完成される。
一方、干渉チェックの結果、干渉が発生する場合には、ロボット10がこのまま動作すると干渉が発生することとなるため、干渉予知装置31は、通信ネットワーク50を介してロボットコントローラ20へ停止信号を送信する。この動作は、図2に示す干渉予知装置31の動作停止部31cで実行される。停止信号を受信したロボットコントローラ20は、対応するロボット10の動作を停止させる(図4、ステップS4)。これにより、干渉を未然に防止することができる。
If there is no interference as a result of the interference check by the
On the other hand, if interference occurs as a result of the interference check, interference will occur if the
また、この動作と並行して干渉予知装置31は、画面表示部31bによって、表示画面32の3次元仮想空間モデル内で、例えば表示色を変更する等の手法にてロボット10の干渉するであろう干渉予測部分を強調表示する。このような干渉状況における3次元仮想空間モデルを図6に示す。図6において、「11」の符号を付した部分が強調表示された、ロボット10の干渉予測部分に相当する。これにより、教示作業者は、干渉予測部分を容易に認識することができる。
In parallel with this operation, the
さらにまた、上記停止信号の送信と並行してシミュレータ30の干渉予知装置31は、通信ネットワーク50を介して接続されている教示装置40に対しても干渉予知を通知し、ロボット10の干渉予測部分に関する情報を送信する。この動作は、図2に示す干渉予知装置31の教示装置用干渉表示部31dで実行される。よって、教示装置40の表示画面41にも、シミュレータ30の表示画面32に表示されているのと同じ画像が表示され、ロボット10の干渉予測部分も表示される。尚、教示装置40は、表示画面41の必要領域(例えば干渉予測部分)を拡大表示可能に構成されている。これにより教示作業者は、ロボット10のどの部分に注意しなければならないのかを認識でき、干渉回避用の動作を指示するための目安にすることができる。
Further, in parallel with the transmission of the stop signal, the
その後、再び、図4のステップS1に戻り、教示作業者は、教示装置40を用いて干渉を回避できるようにロボット10の動作位置及び姿勢を指示する。以下、ステップS3にて干渉無しが判断されるまで、同様にステップS2〜4が繰り返され、教示作業者は、ロボット10における、教示しようとする教示位置の教示を終了する。そして他の教示位置についても同様の教示作業を行い、最終的にロボット10の教示作業が完成する。
Thereafter, the process returns to step S1 in FIG. 4 again, and the teaching operator instructs the operation position and posture of the
このように本実施形態のロボット動作教示支援装置100を用いることで、ロボット10の干渉予知が実行され、実際に干渉が発生する前にロボット10は停止され、かつ、教示装置40にロボット10の干渉予測部分が表示されて、教示作業者は教示装置40から修正位置情報を入力できる。したがって、ロボット10の動作プログラムにおける干渉防止のために要する作業を従来に比べて効率的に行うことができ、教示作業の効率化及び時間短縮を図ることができる。よって、動作プログラム設計者における負担を軽減することもでき、さらには、生産ライン立ち上げ時間を短縮することもできる。そして、実際のロボット10の動作においてロボット10同士、あるいはロボット10とその周辺装置との干渉防止を図ることができる。また、上述のロボット10の停止を、一時停止のような迅速な作業再開が可能な態様での停止とすることで、作業を更に効率的に行うことができる。
As described above, by using the robot motion
以下には、本実施形態のロボット動作教示支援装置100における更なる工夫点等について説明を行う。
シミュレータ30では、上述したように仮想的な3次元空間を構築して干渉の有無をチェックしている。よって、この3次元仮想空間における機器配置と、実際の機器配置とは数mmオーダー以上の位置誤差が発生することは避けることができない。このような位置誤差に起因する干渉の誤検出に対処するために、本実施形態のロボット動作教示支援装置100では以下の2点を構成している。
Hereinafter, further contrivance points and the like in the robot motion
In the
一つ目として、干渉予知装置31における干渉有無のチェックロジックでは、3次元仮想空間モデルを構成する幾何形状間の距離が設定値未満になったときに、干渉すると判断している。そこで、上記位置誤差に対処するために、干渉予知装置31では、上記位置誤差に対応して上記設定値を調整することで対応する。理想の設定値はゼロである。この動作は、図2に示す干渉予知装置31の距離設定部31eで実行される。
First, the check logic for the presence or absence of interference in the
他の一つとして、ロボットコントローラ20の将来位置算出部21で将来の指令値(将来の位置)を算出する際に、どれだけ先の将来の時刻における指令値を算出するかで調整する。より先の時刻の指令値を算出する方が感度は上がる。
As another one, when the future command value (future position) is calculated by the future
また、上述の位置誤差への対処とも関係するが、デッドロックと呼ばれる状態にロボット10が陥る場合がある。即ち、ロボット10の例えばアームが狭隘部に進入してしまい、ほとんどの方向に動作させた場合に干渉有と判断されてしまい、ロボット10が移動できなくなる場合が想定される。
このようなデッドロック状態からの離脱を容易に行うために、教示装置40は、干渉チェックの有効あるいは無効を容易に切り替えることのできる有効/無効切替ボタン(干渉チェックオーバーライドボタン)42(図1)を有する。例えば、教示作業者がこのボタンを押しながら、かつロボット10の軸操作キーを押下する等してロボット10の動作位置及び姿勢を指示したときには、教示装置40は、干渉予知装置31に対して干渉チェックを無効の状態とすることができる。尚、本機能は、上述の、位置誤差による誤検知への対策としても使用できる。
In addition, although related to the handling of the position error, the
In order to easily release from such a deadlock state, the
既に、位置誤差による誤検知への対策の一つとして実時刻から将来の指令値算出時刻までの時間を調整すること、及びこの時間は短い方が理想的であることを述べた。しかしながら、干渉予知を行う対象のロボット10の台数が増加する等の場合には、干渉チェックに要する時間が増大してしまう。その結果、ロボット10の将来位置をチェックできず、干渉が発生する可能性も生じる。そこで干渉発生を防止するために、物理的に計算量を削減して干渉チェック時間の短縮を図る方法がある。つまり、シミュレータ30の干渉予知装置31は、例えば干渉が発生しない、動作範囲外に配置されるロボット及び周辺装置について、干渉チェックを実行しないように構成してもよい。また、教示装置40を用いて、干渉チェックの対象とする組み合わせを手動で設定するようにしてもよい。
It has already been stated that adjusting the time from the actual time to the future command value calculation time as one of the countermeasures against the erroneous detection due to the position error, and that the shorter this time is ideal. However, when the number of
また、上述の、物理的に計算量を削減する以外で干渉発生防止を図る方法として、次の方法を採ることもできる。即ち、干渉チェックに要する時間と、実時刻から将来の指令値算出時刻までの時間との比較を常時行い、干渉チェックに要する時間の方が長いと判断されたときには、例えば、教示装置40を介して教示作業者にその旨を通知して教示作業者に実時刻から将来の指令値算出時刻までの時間設定を変更させる、あるいは干渉予知装置31にて自動的に時間設定を調整する、等の手段を採るようにしてもよい。
Moreover, the following method can also be taken as a method for preventing the occurrence of interference other than physically reducing the amount of calculation described above. That is, the time required for the interference check is always compared with the time from the actual time to the future command value calculation time, and when it is determined that the time required for the interference check is longer, for example, via the
また、本実施形態のロボット動作教示支援装置100では、シミュレータ30は、ロボットコントローラ20と通信ネットワーク50を介して常時接続されている構成であるが、シミュレータ30を取り外し可能とし必要時のみ通信ネットワーク50に接続するように構成してもよい。ここで必要時とは、上述したような生産ライン立ち上げ時や、例えばワーク変更、ライン変更などに伴うロボット10の教示変更などである。
In the robot motion
また、ロボット動作教示支援装置100では、上述したように、教示作業時での干渉を回避するための装置として使用を想定しているが、完成した動作プログラムによる自動運転時のロボットのエラー停止、プログラムミスなどによる干渉を防止するためにも使用することができる。
In addition, as described above, the robot motion
また、ロボット10の周辺装置及びワークなどは、静止しているもの以外にも、ポジショナなどにより移動するような物体でも干渉チェック対象とできる。
また、物体を移動させるためのアクチュエータに内蔵された、エンコーダ等のセンサからの情報に基づき、物体の位置を求めることができる場合や、レーザ距離センサのような外部のセンサにて物体の位置を計測してもよい。計測したデータを干渉予知装置31に入力することで、3次元仮想空間内における物体の位置を決定してもよい。
Further, as for the peripheral device and the workpiece of the
In addition, when the position of the object can be obtained based on information from a sensor such as an encoder built in the actuator for moving the object, or the position of the object can be determined by an external sensor such as a laser distance sensor. You may measure. The position of the object in the three-dimensional virtual space may be determined by inputting the measured data to the
本発明は、ロボットの動作教示時における教示支援装置及び教示支援方法に適用可能である。 The present invention can be applied to a teaching support apparatus and teaching support method at the time of teaching robot operation.
10…ロボット、20…ロボットコントローラ、21…将来位置算出部、
30…シミュレータ、31…干渉予知装置、31a…仮想空間生成部、
31b…画面表示部、31c…動作停止部、31d…教示装置用干渉表示部、
31e…距離設定部、40…教示装置、42…有効/無効切替ボタン、
100…ロボット動作教示支援装置。
10 ... Robot, 20 ... Robot controller, 21 ... Future position calculation unit,
30 ... Simulator, 31 ... Interference prediction device, 31a ... Virtual space generation part,
31b ... Screen display unit, 31c ... Operation stop unit, 31d ... Interference display unit for teaching device,
31e ... Distance setting unit, 40 ... Teaching device, 42 ... Valid / invalid switching button
100: Robot motion teaching support device.
Claims (7)
上記ロボットコントローラは、ロボットの動作姿勢の将来位置を算出する将来位置算出部(21)を有し、
上記シミュレータは、上記将来位置算出部から供給される将来位置でのロボットの動作姿勢を画面表示し、かつ将来位置での当該ロボットの干渉の有無を判断する干渉予知装置(31)を有し、
上記ロボットコントローラに接続されロボットの動作位置情報を入力する教示装置(40)をさらに備え、ここで教示装置は、上記動作プログラムにおいて作成されるロボットの動作姿勢の第1動作位置情報及び第2動作位置情報のうち第1動作位置情報が入力されるものであり、
上記将来位置算出部は、上記教示装置から入力された上記第1動作位置情報に応じて、ロボットの動作姿勢の将来位置に相当する上記第2動作位置情報を算出する、
ことを特徴とするロボット動作教示支援装置。 A robot motion teaching support apparatus that includes a simulator (30) that is connected to a robot controller (20) that controls the motion of the robot (10) according to the motion program and that displays the motion posture of the robot on the screen, and that supports creation of the motion program. And
The robot controller has a future position calculation unit (21) for calculating the future position of the robot's motion posture,
The simulator, the future position calculating unit operation posture of the robot at the future position supplied screen displays from, and possess the interference prediction apparatus for determining the presence or absence of interference of the robot (31) at a future position,
The teaching device further includes a teaching device connected to the robot controller and inputting robot operation position information, wherein the teaching device includes first operation position information and second operation of the robot operation posture created in the operation program. Among the position information, the first operation position information is input,
The future position calculation unit calculates the second motion position information corresponding to the future position of the robot motion posture in accordance with the first motion position information input from the teaching device.
A robot motion teaching support apparatus.
上記干渉予知装置は、さらに、教示装置から入力される動作位置情報に伴い変化するロボットの将来位置における干渉の有無を上記3次元仮想空間において判断し、かつ上記教示装置に対して干渉箇所を表示させる教示装置用干渉表示部(31d)を有する、請求項2記載のロボット動作教示支援装置。 Upper Symbol Interference prediction device, the virtual space generation unit for generating a three-dimensional virtual space of arranging the robot and the robot peripheral device at the same positional relationship as the actual working environment in the robot has a (31a), in the 3-dimensional virtual space Display the robot's movement posture at the above future position,
The interference prediction apparatus further determines in the three-dimensional virtual space whether or not there is interference at a future position of the robot that changes in accordance with the operation position information input from the teaching apparatus, and displays the interference location on the teaching apparatus. The robot operation teaching support apparatus according to claim 2, further comprising a teaching apparatus interference display unit (31 d) to be operated.
上記教示装置を介して、上記動作プログラムにおいて作成されるロボットの動作姿勢の第1動作位置情報及び第2動作位置情報のうち第1動作位置情報が入力されたとき、
上記ロボットコントローラは、入力された上記第1動作位置情報に応じて、ロボットの動作姿勢の将来位置に相当する上記第2動作位置情報を算出し、
上記シミュレータは、ロボットにおける実際の作業環境と同じ位置関係でロボット及びロボット周辺装置を配置した3次元仮想空間を生成し、この3次元仮想空間において上記将来位置でのロボットの動作姿勢を表示し、さらに、上記教示装置から入力される動作位置情報に伴い変化するロボットの将来位置での干渉の有無を上記3次元仮想空間において判断し、
干渉有のときには、上記シミュレータは、さらに、ロボットコントローラに対してロボットの動作停止を指示し、かつ干渉を回避可能な動作位置情報を入力するために上記教示装置へ干渉箇所を表示させる、
ことを特徴とするロボット動作教示支援方法。 A simulator (30) connected to the robot controller (20) for controlling the operation of the robot (10) according to the operation program and displaying the operation posture of the robot on the screen, and a teaching for inputting the operation position information of the robot connected to the robot controller. A robot motion teaching support method for supporting creation of a robot motion program, which is executed by a robot motion teaching support device including the device (40),
When the first motion position information among the first motion position information and the second motion position information of the motion posture of the robot created in the motion program is input via the teaching device,
The robot controller calculates the second movement position information corresponding to the future position of the movement posture of the robot according to the input first movement position information ,
The simulator generates a three-dimensional virtual space in which the robot and the robot peripheral device are arranged in the same positional relationship as the actual work environment in the robot, and displays the robot's motion posture at the future position in the three-dimensional virtual space. Further, in the three-dimensional virtual space, the presence or absence of interference at the future position of the robot that changes with the operation position information input from the teaching device is determined.
When there is interference, the simulator further instructs the robot controller to stop the operation of the robot, and causes the teaching device to display the interference location in order to input operation position information that can avoid the interference.
A robot motion teaching support method.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011288486A JP5872894B2 (en) | 2011-12-28 | 2011-12-28 | Robot motion teaching support apparatus and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011288486A JP5872894B2 (en) | 2011-12-28 | 2011-12-28 | Robot motion teaching support apparatus and method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013136123A JP2013136123A (en) | 2013-07-11 |
| JP5872894B2 true JP5872894B2 (en) | 2016-03-01 |
Family
ID=48912319
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011288486A Active JP5872894B2 (en) | 2011-12-28 | 2011-12-28 | Robot motion teaching support apparatus and method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5872894B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102267943B1 (en) * | 2019-12-17 | 2021-06-21 | 경남대학교 산학협력단 | Apparatus for monitoring 6-axis articulated robot |
| KR20230068530A (en) * | 2021-11-11 | 2023-05-18 | 주식회사 소이넷 | cooperative robot monitoring-control system |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5927310B1 (en) | 2015-01-14 | 2016-06-01 | ファナック株式会社 | Robot system simulation device |
| JP6328599B2 (en) | 2015-11-20 | 2018-05-23 | ファナック株式会社 | Robot manual feed device that calculates the operable range of the robot |
| JP6420296B2 (en) | 2016-12-01 | 2018-11-07 | ファナック株式会社 | Robot controller that automatically sets the robot interference area |
| US10766140B2 (en) * | 2017-04-13 | 2020-09-08 | Battelle Memorial Institute | Teach mode collision avoidance system and method for industrial robotic manipulators |
| JP6909632B2 (en) * | 2017-05-16 | 2021-07-28 | タクボエンジニアリング株式会社 | Teaching method for painting robots |
| JP6592053B2 (en) * | 2017-10-11 | 2019-10-16 | ファナック株式会社 | Control device for monitoring the moving direction of the work tool |
| JP7155664B2 (en) * | 2017-10-31 | 2022-10-19 | セイコーエプソン株式会社 | Simulation equipment, controllers and robots |
| WO2019092792A1 (en) * | 2017-11-07 | 2019-05-16 | 三菱電機株式会社 | Display control device, display control method, and display control program |
| JP7146402B2 (en) | 2018-01-18 | 2022-10-04 | キヤノン株式会社 | Information processing device and information processing method |
| JP7118725B2 (en) * | 2018-04-27 | 2022-08-16 | 川崎重工業株式会社 | Robot teaching method and robot teaching system |
| JP2020082307A (en) * | 2018-11-29 | 2020-06-04 | トヨタ自動車株式会社 | Risk assessment method for robot |
| JP7396872B2 (en) | 2019-11-22 | 2023-12-12 | ファナック株式会社 | Simulation device and robot system using augmented reality |
| CN111862297A (en) * | 2020-06-02 | 2020-10-30 | 天津大学 | Coon 3D-based collaborative robot visual simulation teaching method |
| WO2024111687A1 (en) * | 2022-11-22 | 2024-05-30 | 엘지전자 주식회사 | Method for virtually verifying robot, and system therefor |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07299792A (en) * | 1994-04-28 | 1995-11-14 | Matsushita Electric Ind Co Ltd | Double-armed robot system and its controlling method |
| JP3202731B2 (en) * | 1999-06-21 | 2001-08-27 | 川崎重工業株式会社 | Transfer device |
| JP2003165079A (en) * | 2001-11-28 | 2003-06-10 | Nachi Fujikoshi Corp | Industrial robot |
| JP3907649B2 (en) * | 2004-09-02 | 2007-04-18 | ファナック株式会社 | Interference prevention control device between robots |
| JP4836458B2 (en) * | 2005-01-07 | 2011-12-14 | 株式会社神戸製鋼所 | How to create an operation program |
| KR100738052B1 (en) * | 2006-12-26 | 2007-07-12 | 주식회사 이디 | System for simulating intelligent robot control |
| JP5025598B2 (en) * | 2008-08-29 | 2012-09-12 | 三菱電機株式会社 | Interference check control apparatus and interference check control method |
| JP2010172990A (en) * | 2009-01-28 | 2010-08-12 | Seiko Epson Corp | Apparatus and method for controlling robot |
| JP2010240782A (en) * | 2009-04-07 | 2010-10-28 | Seiko Epson Corp | Robot control system, control device, and control method |
-
2011
- 2011-12-28 JP JP2011288486A patent/JP5872894B2/en active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102267943B1 (en) * | 2019-12-17 | 2021-06-21 | 경남대학교 산학협력단 | Apparatus for monitoring 6-axis articulated robot |
| KR20230068530A (en) * | 2021-11-11 | 2023-05-18 | 주식회사 소이넷 | cooperative robot monitoring-control system |
| KR102691989B1 (en) * | 2021-11-11 | 2024-08-05 | 주식회사 소이넷 | cooperative robot monitoring-control system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013136123A (en) | 2013-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5872894B2 (en) | Robot motion teaching support apparatus and method | |
| US11220002B2 (en) | Robot simulation device | |
| US10737396B2 (en) | Method and apparatus for robot path teaching | |
| US9149931B2 (en) | Robot system, robot control device and method for controlling robot | |
| JP3708083B2 (en) | Robot teaching device | |
| JP6450737B2 (en) | Robot system | |
| US9073211B2 (en) | Control system and teaching method for seven-axis articulated robot | |
| US20070032905A1 (en) | Robot programming device | |
| JP5458769B2 (en) | Robot control device | |
| JP2011048621A (en) | Robot off-line teaching method | |
| JP2015174185A (en) | Robot simulation device and method, control device, and robot system | |
| CN118269089A (en) | Method for motion simulation of manipulator | |
| JP2010052114A (en) | Device and method for controlling interference check | |
| US12115672B2 (en) | Robot planning | |
| JP2018062026A (en) | Robot control device with function for restricting speed and acceleration of robot | |
| JP2018176333A (en) | Offline programming apparatus and method having workpiece position detection program generation function using contact sensor | |
| JP2016159406A (en) | Robot control device, robot control method and robot system | |
| JP2007272309A (en) | Off-line teaching device for working robot | |
| US10022868B2 (en) | Inverse kinematic solution for multi-joint link mechanism, and teaching-data creating device using the inverse kinematic solution | |
| JP7448651B2 (en) | Offline teaching device and operation program generation method | |
| US20180088569A1 (en) | Off-line-programming jog assist device, jog assist method, and recording medium storing jog assist program | |
| US11787054B2 (en) | Robot planning | |
| JP2015100874A (en) | Robot system | |
| JP2021175595A (en) | Simulator, robot teaching device, robot system, simulation method, program, and recording medium | |
| JP7568854B2 (en) | CONTROL DEVICE, INTERFERENCE CHECK DEVICE, AND CONTROL SYSTEM |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141009 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150813 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150825 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151020 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5872894 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |