JP5782446B2 - 接触面上における1つまたは複数の対象用の接触データの決定 - Google Patents
接触面上における1つまたは複数の対象用の接触データの決定 Download PDFInfo
- Publication number
- JP5782446B2 JP5782446B2 JP2012535161A JP2012535161A JP5782446B2 JP 5782446 B2 JP5782446 B2 JP 5782446B2 JP 2012535161 A JP2012535161 A JP 2012535161A JP 2012535161 A JP2012535161 A JP 2012535161A JP 5782446 B2 JP5782446 B2 JP 5782446B2
- Authority
- JP
- Japan
- Prior art keywords
- contact
- signal
- light
- contact surface
- panel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
- G06F3/0421—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by interrupting or reflecting a light beam, e.g. optical touch-screen
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04109—FTIR in optical digitiser, i.e. touch detection by frustrating the total internal reflection within an optical waveguide due to changes of optical properties or deformation at the touch location
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Input By Displaying (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
本出願は、2009年10月19日出願のスウェーデン特許出願第0950768−2号および2009年10月19日出願の米国仮出願第61/272,665号の利益を主張し、これら両方の出願が、参照により本明細書に援用されている。
Si:空間伝播信号i
Pi、j:空間伝播信号iにおけるピークj
bi、j、l:空間伝播信号iにおけるピークjの左極限
bi、j、r:空間伝播信号iにおけるピークjの右極限
bi、j、m:空間伝播信号iのピークjにおける極小の位置
Ai:空間伝播信号i用の多角形セット
Ai、j:多角形セットiにおける減衰経路j
Di、j:多角形セットiにおける不感帯j
Ai+k:多角形セットAiおよびAkの交点
図1Aは、接触検出機器における例示的な機構の側面図である。この機構には、光透過パネル1、1つまたは複数の光エミッタ2(1つが示されている)、および1つまたは複数の光センサ3(1つが示されている)が含まれる。パネルは、2つの対向する略平行な面4、5を規定し、かつ平面または曲面であってもよい。放射伝播チャネルが、パネルの2つの境界面間に設けられ、境界面4、5の少なくとも1つによって、伝播光は、接触対象6と相互作用することが可能になる。典型的には、エミッタ2からの光は、放射伝播チャネルにおける全内部反射(TIR)によって伝播し、センサ3は、パネル1の周囲に配置されて、受信光のエネルギを示すそれぞれの出力信号を生成する。
図2は、図1に関連して上で記載し説明したような接触検出機器において得られる出力信号に基づいた、接触決定のための例示的な方法の流れ図である。以下で方法ステップを簡潔に説明して、方法の概要、ならびに個別ステップおよび/またはステップの組み合わせのいくつかの利点を提示する。
一実施形態において、空間伝播信号は、特定の閾値を超える減衰を備えたどんなピークも検出するように処理される。閾値は、任意の適切な値に固定し設定してもよいが、一般に0.25未満である。一例において、閾値は、最も弱い接触シグネチャを検出できるように、約0.01〜0.001などの非常に低い値に設定される。一般に、閾値は、空間伝播信号のノイズレベルの上に設定される。したがって、ピーク検出ステップの感度を改善するために、任意の標準フィルタ技術、例えば低域通過フィルタ、メジアンフィルタ、フーリエフィルタ等を用いて、ピーク検出ステップの前に、ノイズ低減用に空間伝播信号を前処理するのが望ましくなり得る。
1.空間伝播信号の左端からスタートする。
2.左から右へ行きながら空間伝播信号Siにおける信号値を繰り返し処理し、減衰が閾値qtより大きくなる位置、および減衰が再び閾値qtより小さくなる位置を見つける。これらの位置をピークPi、jの極限点bi、j、l、bi、j、rとして記憶する。また、各ピークPi、jに対して、ピークに境界があるかないか、すなわち極限点の1つが空間伝播信号Siにおける活性領域(以下を参照)の端部と一致するかどうかの情報を記憶する。
3.各ピークPi、jに対して、極限点bi、j、l、bi、j、rを処理して、それらをピークPi、jからわずかに潜在的に移動させる。例えば、各極限点は、信号値が大きさにおいて減少している限り、ピークから離れるように移動してもよい。このステップは、閾値qtを超える信号値を有する接触シグネチャの狭い領域だけでなく、弱い接触シグネチャが全体として含まれることを保証するように働き得る。次に、結果としての極限点は、後続の計算において極限点として用いられる。
4.全てのピークPi、jに対して、恐らく、極小値の深さが、所定のまたは予め設定されたノイズ閾値を超えなければならないという追加制約と共に任意の適切なアルゴリズムを用いて、極限点間の極小値を探索する。各ピーク用の極小値bi、j、mに関する情報を記憶する。
5.1つまたは複数の極小値を有する全てのピークに対して、ピークを分割する。分割されたピーク用の極限点は、極小値の位置を極限点として用いることによって、または任意の他の適切な技術によって、上記の基底関数を用いて決定してもよい。
多角形セットを生成するステップを説明し例示する目的で、図4Aにおける走査ビーム実施形態を検討する。ここで、6つのビームB1−B6が、接触面にわたって掃引され、この場合に第1のビームセットB1、B3、B4が、第1の入力結合部位10から第1の出力結合部位11への伝播のために導入され、同時に第1の主方向R1において掃引され、第2のビームセットB2、B5、B6が、第2の入力結合部位10から第2の出力結合部位11への伝播のために導入され、同時に第2の主方向R2において掃引される。第1および第2の主方向R1、R2は、相互に直交し、パネルのエッジに平行である。第1のビームセットには、第1の入力結合部位10に垂直な1つのビームB1と、2つの非垂直で非平行なビームB3、B4と、が含まれる。第2のビームセットには、第2の入力結合部位10に垂直な1つのビームB2と、2つの非垂直で非平行なビームB5、B6と、が含まれる。

解析領域を決定するステップには、様々な信号伝播信号Si用に生成された多角形セットAiの全交差Atotalを推定または計算することが含まれる。
再構成ステップにおいて、解析領域は、接触点の存在を識別するように処理される。再構成ステップには、典型的には空間分布図を生成することが含まれるが、この空間分布図は、解析領域内におけるエネルギ/減衰/透過率の値の空間分布を示す。かかる空間分布図は、接触面全体にわたる空間分布図を再構成して、局所的に解析領域内だけの空間分布図を生成するために使用できる任意の既存の画像再構成技術を適合させて生成することができる。
1.適切なフィルタを投影に適用する。適切なフィルタは、文献で見つけられるが、しかし例えば、Ram−LakまたはShepp−Logan(シェフ−ローガン)とすることができる。フィルタは、フーリエ平面または空間領域において利用することができる。
2.空間分布図における全ての点/画素に対して、再構成された信号値が、全てのフィルタ補正投影との画素の相互作用の和として計算される。これは、逆投影プロセスである。
局所的な再構成ステップ206の完了後に、空間分布図内の真の(実際の)接触点を分離するために任意の周知技術を用いてもよい。例えば、通常の塊検出および追跡技術を、実際の接触点を見つけるために用いてもよい。しかしながら、先の局所的な再構成ステップが、接触点を抽出するために必要とされる処理を低減することを理解されたい。
上記のように、空間伝播信号は、背景信号を用いた正規化を通じて取得してもよい。背景信号は、典型的には、対象がパネルに接触していない状態での透過エネルギを表し、したがってそれぞれの出力結合部位における光の空間分布を示す。背景信号は、各検出器/出力結合部位または各出力信号に対して一意であってもなくてもよい。背景信号は、予め設定しても、別個の較正ステップ中に導き出しても、または恐らくかかる出力信号のセットを平均することによって1つまたは複数の前の繰り返し中に取得された出力信号(どんな対象もパネルに接触していない)から導き出してもよい。
本出願人は、光散乱効果を考慮するように接触決定プロセスを設計することによって、接触決定を改善し得ることを理解した。
上記のように、分散関数は、特定の接触検出機器用の理論計算によってか、または測定によって得ることができる。図19は、図1Cに示すタイプの走査ビーム実施形態から得られた測定データのグラフであるが、この場合に測定データは、直径が37インチの矩形光透過パネル用に得られた。グラフは、エントリ点(例えば、図1Cにおけるパネルの左側に位置する)と接触対象との間の距離の関数として、接触シグネチャの測定された半値幅を示す。したがって、このグラフは、図15Aにおけるグラフに対応する。接触シグネチャ幅は、エントリ点からの距離(およびまた出力結合点までの距離)に明白に依存する。この特定の例において、接触対象が、出力結合点に接近して位置する場合に、接触シグネチャ幅における減少はない。分散関数は、図15Bに示すように関数への再計算後に、実際の測定データによって適切に提供してもよく、または分散関数は、測定データに適合された適切な関数に基づいて導き出してもよい。かかる適合された関数は、線形、多角形、スプライン等であってもよい。
Claims (14)
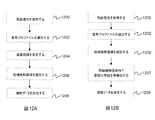
- 接触検出機器における方法において、前記機器が、接触面(4)および対向面(5)を画定する光透過パネル(1)と、前記パネル(1)内で光シートを供給するための光源機構(2;8)であって、各シートが、前記接触面(4)と前記対向面(5)との間の内部反射によって、入力結合部位(10)から出力結合部位(11)へ伝播する光を含む光源機構(2;8)と、を含み、前記機器が、前記出力結合部位(11)に達する光を検出するための光センサ機構(3;9)であって、前記接触面(4)に接触する1つまたは複数の対象(6)が少なくとも2つの光シートの局所的減衰を引き起こすように前記接触検出機器が構成された光センサ機構(3;9)をさらに含み、前記方法が、
前記出力結合部位(11)内で、光の空間分布を示す少なくとも1つの投影信号(Si)を取得するステップと、
前記減衰を表す信号プロファイル(Pi、j)の識別のために前記少なくとも1つの投影信号(Si)を処理するステップと、
前記信号プロファイル(Pi、j)に基づいて、前記接触面(4)上の1つまたは複数の候補接触領域を識別するステップと、
前記1つまたは複数の候補接触領域内で、信号値の二次元分布を再構成するために前記少なくとも1つの投影信号(Si)を処理するステップと、
前記候補接触領域内で、前記再構成された信号値を処理することによって、前記または各対象(6)用の接触データを決定するステップと、
を含むことを特徴とする方法。 - 請求項1に記載の方法において、前記識別ステップが、各信号プロファイル(Pi、j)用に、前記接触面(4)にわたる減衰経路(Ai、j)を決定するステップであって、前記減衰経路が、前記信号プロファイル(Pi、j)に基づいて決定される幅を有するステップと、このように決定された減衰経路(Ai、j)のセットの関数として、前記接触面(4)上の前記1つまたは複数の候補接触領域を識別するステップと、を含むことを特徴とする方法。
- 請求項2に記載の方法において、前記識別ステップが、前記減衰経路(Ai、j)を交差させるステップを含むことを特徴とする方法。
- 請求項3に記載の方法において、前記取得ステップが、複数の投影信号(Si)を取得するステップであって、各投影信号(Si)が、前記接触面(4)の不感帯(Di、j)のセットに関連付けられ、前記投影信号(Si)が、前記接触面(4)に接触する対象(6)に無感応であるステップを含み、かつ前記識別ステップが、前記減衰経路(Ai、j)を前記不感帯(Di、j)と交差させるステップをさらに含むことを特徴とする方法。
- 請求項2に記載の方法において、前記取得ステップが、複数の投影信号(Si)を取得するステップを含み、前記識別ステップが、各投影信号(Si)用に、前記接触面(4)上の関連する減衰経路(Ai、j)の位置を表す経路図(Ai)を生成するステップと、前記生成された経路図(Ai)を交差させるステップと、を含むことを特徴とする方法。
- 請求項5に記載の方法において、各経路図(Ai)が、前記光シートの1つに関連付けられ、かつ前記識別ステップが、前記関連するシートにおける光線間の角度を最小化するように経路図(Ai)ペアを形成するステップと、前記経路図(Ai)ペアを交差させるステップと、を含むことを特徴とする方法。
- 請求項2に記載の方法において、前記取得ステップが、複数の投影信号(Si)を取得するステップを含み、かつ前記識別ステップが、各投影信号(Si)ペア用に、前記投影信号(Si)ペア用に決定された前記減衰経路(Ai、j)の交差を表す経路図(Ai)を生成するステップと、前記生成された経路図(Ai)を交差させるステップと、を含むことを特徴とする方法。
- 請求項5〜7のいずれか一項に記載の方法において、前記交差させるステップが、前記経路図(Ai)を幾何学的に整列させるステップと、前記経路図(Ai)に対して論理積演算を実行するステップと、を含むことを特徴とする方法。
- 請求項5〜8のいずれか一項に記載の方法において、各経路図(Ai)が、前記接触面(4)上の不感帯(Di、j)の位置をさらに表してもよく、前記投影信号(Si)が、前記接触面(4)に接触する対象(6)に無感応であることを特徴とする方法。
- 請求項2〜9のいずれか一項に記載の方法において、前記減衰経路を決定する前記ステップが、多角形、好ましくは凸多角形によって各減衰経路(Ai、j)を表すステップを含むことを特徴とする方法。
- 請求項1〜10のいずれか一項に記載の方法において、各投影信号(Si)が、前記光シートの1つに関連付けられることを特徴とする方法。
- 請求項1〜11のいずれか一項に記載の方法において、前記投影信号(Si)を取得する前記ステップが、前記出力結合部位内(11)で、光エネルギの空間分布を表すエネルギ信号を取得するステップと、背景信号(REF)によって前記エネルギ信号を正規化するステップであって、前記背景信号(REF)が、前記接触面(4)に対象(6)が接触していない状態で前記出力結合部位(11)内で前記光エネルギ空間分布を表すステップと、を含むことを特徴とする方法。
- データ処理システム上で実行される場合に、請求項1〜12のいずれか一項に記載の方法を実行するように適合されたコンピュータコードを含むコンピュータプログラムプロダクト。
- 接触検出機器に含まれる、接触面(4)における1つまたは複数の対象(6)用の接触データを決定するための装置において、前記接触検出機器が、前記接触面(4)および対向面(5)を画定する光透過パネル(1)と、前記パネル(1)内で光シートを供給するための光源機構(2;8)であって、各シートが、前記接触面(4)と前記対向面(5)との間の内部反射によって、入力結合部位(10)から出力結合部位(11)へ伝播する光を含む光源機構(2;8)と、前記出力結合部位(11)に達する光を検出するための光センサ機構(3;9)であって、前記接触面(4)に接触する各対象(6)が少なくとも2つの光シートを局所的に減衰させるように、前記接触検出機器が構成される光センサ機構(3;9)と、を含み、前記装置が、
前記出力結合部位(11)内で光の空間分布を示す少なくとも1つの投影信号(Si)を取得するための要素(1300)と、
前記減衰を表す信号プロファイル(Pi、j)の識別のために前記少なくとも1つの投影信号(Si)を処理するための要素(1302)と、
前記信号プロファイル(Pi、j)に基づいて、前記接触面(4)上の1つまたは複数の候補接触領域を識別するための要素(1304)と、
前記1つまたは複数の候補接触領域内で信号値の二次元分布を再構成するために、前記少なくとも1つの投影信号(Si)を処理するための要素(1306)と、
前記候補接触域内で、前記再構成された信号値を処理することによって、前記または各対象(6)用の接触データを決定するための要素(1308)と、を含むことを特徴とする装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US27266509P | 2009-10-19 | 2009-10-19 | |
| US61/272,665 | 2009-10-19 | ||
| SE0950768 | 2009-10-19 | ||
| SE0950768-2 | 2009-10-19 | ||
| PCT/SE2010/051107 WO2011049513A1 (en) | 2009-10-19 | 2010-10-13 | Determining touch data for one or more objects on a touch surface |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013508852A JP2013508852A (ja) | 2013-03-07 |
| JP2013508852A5 JP2013508852A5 (ja) | 2013-12-05 |
| JP5782446B2 true JP5782446B2 (ja) | 2015-09-24 |
Family
ID=43900542
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012535161A Expired - Fee Related JP5782446B2 (ja) | 2009-10-19 | 2010-10-13 | 接触面上における1つまたは複数の対象用の接触データの決定 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US9430079B2 (ja) |
| EP (1) | EP2491481A4 (ja) |
| JP (1) | JP5782446B2 (ja) |
| KR (1) | KR20120083915A (ja) |
| CN (1) | CN102656547A (ja) |
| AU (1) | AU2010308596A1 (ja) |
| CA (1) | CA2778154A1 (ja) |
| IL (1) | IL219189A0 (ja) |
| RU (1) | RU2012118597A (ja) |
| WO (1) | WO2011049513A1 (ja) |
Families Citing this family (87)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7148879B2 (en) | 2000-07-06 | 2006-12-12 | At&T Corp. | Bioacoustic control system, method and apparatus |
| CN102171637B (zh) | 2008-08-07 | 2015-08-12 | 拉普特知识产权公司 | 用于检测光学触摸敏感装置中的多触摸事件的方法和设备 |
| US8531435B2 (en) | 2008-08-07 | 2013-09-10 | Rapt Ip Limited | Detecting multitouch events in an optical touch-sensitive device by combining beam information |
| US9092092B2 (en) * | 2008-08-07 | 2015-07-28 | Rapt Ip Limited | Detecting multitouch events in an optical touch-sensitive device using touch event templates |
| SE533704C2 (sv) | 2008-12-05 | 2010-12-07 | Flatfrog Lab Ab | Pekkänslig apparat och förfarande för drivning av densamma |
| JP5295008B2 (ja) * | 2009-06-18 | 2013-09-18 | 株式会社ワコム | 指示体検出装置 |
| JP5396167B2 (ja) * | 2009-06-18 | 2014-01-22 | 株式会社ワコム | 指示体検出装置及び指示体検出方法 |
| AU2010308594A1 (en) | 2009-10-19 | 2012-04-26 | Flatfrog Laboratories Ab | Extracting touch data that represents one or more objects on a touch surface |
| JP5295090B2 (ja) * | 2009-12-18 | 2013-09-18 | 株式会社ワコム | 指示体検出装置 |
| TW201203052A (en) | 2010-05-03 | 2012-01-16 | Flatfrog Lab Ab | Touch determination by tomographic reconstruction |
| WO2012002894A1 (en) | 2010-07-01 | 2012-01-05 | Flatfrog Laboratories Ab | Data processing in relation to a multi-touch sensing apparatus |
| US8692785B2 (en) * | 2010-09-29 | 2014-04-08 | Byd Company Limited | Method and system for detecting one or more objects |
| EP2628068A4 (en) | 2010-10-11 | 2014-02-26 | Flatfrog Lab Ab | TOUCH DETECTION BY TOMOGRAPHIC RECONSTRUCTION |
| EP2652582A4 (en) | 2010-12-15 | 2017-06-21 | FlatFrog Laboratories AB | Touch determination with signal enhancement |
| EP2466428A3 (en) | 2010-12-16 | 2015-07-29 | FlatFrog Laboratories AB | Touch apparatus with separated compartments |
| EP2466429A1 (en) | 2010-12-16 | 2012-06-20 | FlatFrog Laboratories AB | Scanning ftir systems for touch detection |
| US9170683B2 (en) | 2011-07-22 | 2015-10-27 | Rapt Ip Limited | Optical coupler for use in an optical touch sensitive device |
| TW201329821A (zh) | 2011-09-27 | 2013-07-16 | Flatfrog Lab Ab | 用於觸控決定的影像重建技術 |
| TW201333787A (zh) | 2011-10-11 | 2013-08-16 | Flatfrog Lab Ab | 觸控系統中改良的多點觸控偵測 |
| US9658715B2 (en) | 2011-10-20 | 2017-05-23 | Microsoft Technology Licensing, Llc | Display mapping modes for multi-pointer indirect input devices |
| US9274642B2 (en) | 2011-10-20 | 2016-03-01 | Microsoft Technology Licensing, Llc | Acceleration-based interaction for multi-pointer indirect input devices |
| US8933896B2 (en) | 2011-10-25 | 2015-01-13 | Microsoft Corporation | Pressure-based interaction for indirect touch input devices |
| US9367230B2 (en) | 2011-11-08 | 2016-06-14 | Microsoft Technology Licensing, Llc | Interaction models for indirect interaction devices |
| WO2013081894A1 (en) | 2011-11-28 | 2013-06-06 | Corning Incorporated | Optical touch-screen systems and methods using a planar transparent sheet |
| JP2015503159A (ja) | 2011-11-28 | 2015-01-29 | コーニング インコーポレイテッド | 堅牢な光学式タッチスクリーンシステム及び、平面透明シートの使用方法 |
| US9389679B2 (en) | 2011-11-30 | 2016-07-12 | Microsoft Technology Licensing, Llc | Application programming interface for a multi-pointer indirect touch input device |
| US8908894B2 (en) | 2011-12-01 | 2014-12-09 | At&T Intellectual Property I, L.P. | Devices and methods for transferring data through a human body |
| EP2791763B1 (en) * | 2011-12-16 | 2018-10-31 | FlatFrog Laboratories AB | Tracking objects on a touch surface |
| CN104081323B (zh) * | 2011-12-16 | 2016-06-22 | 平蛙实验室股份公司 | 跟踪触摸表面上的对象 |
| US9927920B2 (en) | 2011-12-16 | 2018-03-27 | Flatfrog Laboratories Ab | Tracking objects on a touch surface |
| EP2795437A4 (en) | 2011-12-22 | 2015-07-15 | Flatfrog Lab Ab | TOUCH DETERMINATION WITH INTERACTION COMPENSATION |
| JP5882744B2 (ja) * | 2012-01-05 | 2016-03-09 | キヤノン株式会社 | 座標入力装置 |
| US9323322B2 (en) * | 2012-02-02 | 2016-04-26 | Smart Technologies Ulc | Interactive input system and method of detecting objects |
| WO2013126005A2 (en) | 2012-02-21 | 2013-08-29 | Flatfrog Laboratories Ab | Touch determination with improved detection of weak interactions |
| KR101910607B1 (ko) * | 2012-04-30 | 2018-10-23 | 랩트 아이피 리미티드 | 터치 이벤트 템플릿을 이용한 광학 터치-감지 장치에서의 다중 터치 이벤트 검출 |
| EP2845080A4 (en) | 2012-05-02 | 2015-12-16 | Flatfrog Lab Ab | OBJECT DETECTION IN TOUCH SYSTEMS |
| US10318041B2 (en) | 2012-05-02 | 2019-06-11 | Flatfrog Laboratories Ab | Object detection in touch systems |
| US10168835B2 (en) | 2012-05-23 | 2019-01-01 | Flatfrog Laboratories Ab | Spatial resolution in touch displays |
| US9524060B2 (en) | 2012-07-13 | 2016-12-20 | Rapt Ip Limited | Low power operation of an optical touch-sensitive device for detecting multitouch events |
| US9405382B2 (en) | 2012-07-24 | 2016-08-02 | Rapt Ip Limited | Augmented optical waveguide for use in an optical touch sensitive device |
| EP2706443B1 (en) | 2012-09-11 | 2017-12-27 | FlatFrog Laboratories AB | Touch force estimation in a projection-type touch-sensing apparatus based on frustrated total internal reflection |
| WO2014104968A1 (en) * | 2012-12-27 | 2014-07-03 | Flatfrog Laboratories Ab | A touch-sensing apparatus and a method for enabling control of a touch-sensing apparatus by an external device |
| US9811178B2 (en) * | 2013-03-14 | 2017-11-07 | Apple Inc. | Stylus signal detection and demodulation architecture |
| US10459546B2 (en) * | 2013-03-14 | 2019-10-29 | Apple Inc. | Channel aggregation for optimal stylus detection |
| AU2015258278B2 (en) * | 2013-03-14 | 2016-09-15 | Apple Inc. | Channel aggregation for optimal stylus detection |
| US10019113B2 (en) | 2013-04-11 | 2018-07-10 | Flatfrog Laboratories Ab | Tomographic processing for touch detection |
| US9946366B2 (en) | 2013-06-03 | 2018-04-17 | Apple Inc. | Display, touch, and stylus synchronization |
| US9874978B2 (en) | 2013-07-12 | 2018-01-23 | Flatfrog Laboratories Ab | Partial detect mode |
| CN104298405B (zh) * | 2013-07-19 | 2017-07-28 | 中强光电股份有限公司 | 触控模块、投影系统及其触控方法 |
| US10108984B2 (en) | 2013-10-29 | 2018-10-23 | At&T Intellectual Property I, L.P. | Detecting body language via bone conduction |
| US9594433B2 (en) | 2013-11-05 | 2017-03-14 | At&T Intellectual Property I, L.P. | Gesture-based controls via bone conduction |
| US9349280B2 (en) | 2013-11-18 | 2016-05-24 | At&T Intellectual Property I, L.P. | Disrupting bone conduction signals |
| US10678322B2 (en) | 2013-11-18 | 2020-06-09 | At&T Intellectual Property I, L.P. | Pressure sensing via bone conduction |
| US9715774B2 (en) | 2013-11-19 | 2017-07-25 | At&T Intellectual Property I, L.P. | Authenticating a user on behalf of another user based upon a unique body signature determined through bone conduction signals |
| WO2015076731A1 (en) * | 2013-11-22 | 2015-05-28 | Flatfrog Laboratories Ab | A touch sensitive apparatus with improved spatial resolution |
| US9405892B2 (en) | 2013-11-26 | 2016-08-02 | At&T Intellectual Property I, L.P. | Preventing spoofing attacks for bone conduction applications |
| US10126882B2 (en) | 2014-01-16 | 2018-11-13 | Flatfrog Laboratories Ab | TIR-based optical touch systems of projection-type |
| US10146376B2 (en) | 2014-01-16 | 2018-12-04 | Flatfrog Laboratories Ab | Light coupling in TIR-based optical touch systems |
| US10161886B2 (en) | 2014-06-27 | 2018-12-25 | Flatfrog Laboratories Ab | Detection of surface contamination |
| US9589482B2 (en) | 2014-09-10 | 2017-03-07 | At&T Intellectual Property I, L.P. | Bone conduction tags |
| US9882992B2 (en) | 2014-09-10 | 2018-01-30 | At&T Intellectual Property I, L.P. | Data session handoff using bone conduction |
| US9582071B2 (en) | 2014-09-10 | 2017-02-28 | At&T Intellectual Property I, L.P. | Device hold determination using bone conduction |
| US10045732B2 (en) | 2014-09-10 | 2018-08-14 | At&T Intellectual Property I, L.P. | Measuring muscle exertion using bone conduction |
| US9600079B2 (en) | 2014-10-15 | 2017-03-21 | At&T Intellectual Property I, L.P. | Surface determination via bone conduction |
| CN104317461A (zh) * | 2014-11-03 | 2015-01-28 | 兰州空间技术物理研究所 | 高分辨率红外触摸屏触摸响应模型 |
| US11182023B2 (en) | 2015-01-28 | 2021-11-23 | Flatfrog Laboratories Ab | Dynamic touch quarantine frames |
| US10318074B2 (en) | 2015-01-30 | 2019-06-11 | Flatfrog Laboratories Ab | Touch-sensing OLED display with tilted emitters |
| EP3256936A4 (en) | 2015-02-09 | 2018-10-17 | FlatFrog Laboratories AB | Optical touch system comprising means for projecting and detecting light beams above and inside a transmissive panel |
| CN104571731B (zh) * | 2015-02-16 | 2017-06-09 | 京东方科技集团股份有限公司 | 触摸面板和显示装置 |
| US10401546B2 (en) | 2015-03-02 | 2019-09-03 | Flatfrog Laboratories Ab | Optical component for light coupling |
| WO2017099657A1 (en) | 2015-12-09 | 2017-06-15 | Flatfrog Laboratories Ab | Improved stylus identification |
| CN110100226A (zh) | 2016-11-24 | 2019-08-06 | 平蛙实验室股份公司 | 触摸信号的自动优化 |
| KR102495467B1 (ko) | 2016-12-07 | 2023-02-06 | 플라트프로그 라보라토리즈 에이비 | 개선된 터치 장치 |
| CN116679845A (zh) | 2017-02-06 | 2023-09-01 | 平蛙实验室股份公司 | 触摸感测装置 |
| WO2018174786A1 (en) * | 2017-03-22 | 2018-09-27 | Flatfrog Laboratories | Pen differentiation for touch displays |
| EP4036697A1 (en) | 2017-03-28 | 2022-08-03 | FlatFrog Laboratories AB | Optical touch sensing apparatus |
| KR20240042123A (ko) * | 2017-08-30 | 2024-04-01 | 바이오액시알 사스 | 단일 분포 및 딥 러닝에 기초한 초해상도 계측 방법 |
| CN117311543A (zh) | 2017-09-01 | 2023-12-29 | 平蛙实验室股份公司 | 触摸感测设备 |
| WO2019172826A1 (en) | 2018-03-05 | 2019-09-12 | Flatfrog Laboratories Ab | Improved touch-sensing apparatus |
| CN108710449B (zh) * | 2018-05-02 | 2022-03-22 | Oppo广东移动通信有限公司 | 电子装置 |
| US10831316B2 (en) | 2018-07-26 | 2020-11-10 | At&T Intellectual Property I, L.P. | Surface interface |
| WO2020080992A1 (en) | 2018-10-20 | 2020-04-23 | Flatfrog Laboratories Ab | Frame for a touch-sensitive device and tool therefor |
| US11943563B2 (en) | 2019-01-25 | 2024-03-26 | FlatFrog Laboratories, AB | Videoconferencing terminal and method of operating the same |
| CN112305638A (zh) * | 2019-07-26 | 2021-02-02 | 西安光启未来技术研究院 | 一种有效感知范围识别方法及相关设备 |
| CN112347812B (zh) * | 2019-08-07 | 2024-04-19 | 群创光电股份有限公司 | 通过电子装置以侦测指纹的方法 |
| WO2021107840A1 (en) | 2019-11-25 | 2021-06-03 | Flatfrog Laboratories Ab | A touch-sensing apparatus |
| KR20220131982A (ko) | 2020-02-10 | 2022-09-29 | 플라트프로그 라보라토리즈 에이비 | 향상된 터치-감지 장치 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3673327A (en) | 1970-11-02 | 1972-06-27 | Atomic Energy Commission | Touch actuable data input panel assembly |
| US4254333A (en) | 1978-05-31 | 1981-03-03 | Bergstroem Arne | Optoelectronic circuit element |
| US5105186A (en) * | 1990-05-25 | 1992-04-14 | Hewlett-Packard Company | Lcd touch screen |
| JP3827450B2 (ja) * | 1998-08-18 | 2006-09-27 | 富士通株式会社 | 光走査型タッチパネル |
| US6972753B1 (en) | 1998-10-02 | 2005-12-06 | Semiconductor Energy Laboratory Co., Ltd. | Touch panel, display device provided with touch panel and electronic equipment provided with display device |
| US6690363B2 (en) * | 2000-06-19 | 2004-02-10 | Next Holdings Limited | Touch panel display system |
| JP2003330603A (ja) | 2002-05-13 | 2003-11-21 | Ricoh Co Ltd | 座標検出装置、座標検出方法、その方法をコンピュータに実行させる座標検出プログラムおよび座標検出プログラムを記録した記録媒体 |
| JP2005004278A (ja) * | 2003-06-09 | 2005-01-06 | Ricoh Elemex Corp | 座標入力装置 |
| US7432893B2 (en) * | 2003-06-14 | 2008-10-07 | Massachusetts Institute Of Technology | Input device based on frustrated total internal reflection |
| WO2005026938A2 (en) | 2003-09-12 | 2005-03-24 | O-Pen Aps | A system and method of determining a position of a radiation scattering/reflecting element |
| US8599140B2 (en) | 2004-11-17 | 2013-12-03 | International Business Machines Corporation | Providing a frustrated total internal reflection touch interface |
| JP2008533581A (ja) * | 2005-03-10 | 2008-08-21 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | タッチスクリーン・ディスプレイと相互作用する複数オブジェクトの位置・大きさ・形を検出するためのシステムおよび方法 |
| US8847924B2 (en) | 2005-10-03 | 2014-09-30 | Hewlett-Packard Development Company, L.P. | Reflecting light |
| WO2007112742A1 (en) * | 2006-03-30 | 2007-10-11 | Flatfrog Laboratories Ab | A system and a method of determining a position of a scattering/reflecting element on the surface of a radiation transmissive element |
| US8094136B2 (en) | 2006-07-06 | 2012-01-10 | Flatfrog Laboratories Ab | Optical touchpad with three-dimensional position determination |
| JP5016049B2 (ja) | 2006-09-13 | 2012-09-05 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 対象の方向性の決定 |
| US8094129B2 (en) | 2006-11-27 | 2012-01-10 | Microsoft Corporation | Touch sensing using shadow and reflective modes |
| US20110310064A1 (en) | 2007-06-25 | 2011-12-22 | Nokia Corporation | User Interfaces and Associated Apparatus and Methods |
| US8716614B2 (en) | 2007-10-10 | 2014-05-06 | Flatfrog Laboratories Ab | Touch pad and a method of operating the touch pad |
| AR064377A1 (es) * | 2007-12-17 | 2009-04-01 | Rovere Victor Manuel Suarez | Dispositivo para sensar multiples areas de contacto contra objetos en forma simultanea |
| US20090219256A1 (en) * | 2008-02-11 | 2009-09-03 | John David Newton | Systems and Methods for Resolving Multitouch Scenarios for Optical Touchscreens |
| WO2010006885A2 (en) | 2008-06-23 | 2010-01-21 | Flatfrog Laboratories Ab | Detecting the location of an object on a touch surface |
| TW201013492A (en) | 2008-06-23 | 2010-04-01 | Flatfrog Lab Ab | Determining the location of one or more objects on a touch surface |
| TW201005606A (en) | 2008-06-23 | 2010-02-01 | Flatfrog Lab Ab | Detecting the locations of a plurality of objects on a touch surface |
| TW201001258A (en) | 2008-06-23 | 2010-01-01 | Flatfrog Lab Ab | Determining the location of one or more objects on a touch surface |
| TW201007530A (en) | 2008-06-23 | 2010-02-16 | Flatfrog Lab Ab | Detecting the location of an object on a touch surface |
| CN102171637B (zh) * | 2008-08-07 | 2015-08-12 | 拉普特知识产权公司 | 用于检测光学触摸敏感装置中的多触摸事件的方法和设备 |
| KR101323045B1 (ko) * | 2008-10-21 | 2013-10-29 | 엘지디스플레이 주식회사 | 감지장치와 그 출력 증폭방법 |
| SE533704C2 (sv) | 2008-12-05 | 2010-12-07 | Flatfrog Lab Ab | Pekkänslig apparat och förfarande för drivning av densamma |
| US8154529B2 (en) * | 2009-05-14 | 2012-04-10 | Atmel Corporation | Two-dimensional touch sensors |
| WO2010134865A1 (en) | 2009-05-18 | 2010-11-25 | Flatfrog Laboratories Ab | Determining the location of an object on a touch surface |
| KR101738190B1 (ko) | 2009-09-02 | 2017-05-29 | 플라트프로그 라보라토리즈 에이비 | 보상 신호 프로파일을 갖는 터치 표면 |
| AU2010308594A1 (en) | 2009-10-19 | 2012-04-26 | Flatfrog Laboratories Ab | Extracting touch data that represents one or more objects on a touch surface |
| WO2011049512A1 (en) | 2009-10-19 | 2011-04-28 | Flatfrog Laboratories Ab | Touch surface with two-dimensional compensation |
| WO2011078769A1 (en) | 2009-12-21 | 2011-06-30 | Flatfrog Laboratories Ab | Touch surface with identification of reduced performance |
| TW201203052A (en) | 2010-05-03 | 2012-01-16 | Flatfrog Lab Ab | Touch determination by tomographic reconstruction |
-
2010
- 2010-10-13 AU AU2010308596A patent/AU2010308596A1/en not_active Abandoned
- 2010-10-13 WO PCT/SE2010/051107 patent/WO2011049513A1/en active Application Filing
- 2010-10-13 EP EP10825284.2A patent/EP2491481A4/en not_active Ceased
- 2010-10-13 CN CN2010800471207A patent/CN102656547A/zh active Pending
- 2010-10-13 US US13/502,698 patent/US9430079B2/en active Active
- 2010-10-13 KR KR1020127012818A patent/KR20120083915A/ko not_active Application Discontinuation
- 2010-10-13 CA CA2778154A patent/CA2778154A1/en not_active Abandoned
- 2010-10-13 JP JP2012535161A patent/JP5782446B2/ja not_active Expired - Fee Related
- 2010-10-13 RU RU2012118597/08A patent/RU2012118597A/ru not_active Application Discontinuation
-
2012
- 2012-04-15 IL IL219189A patent/IL219189A0/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| IL219189A0 (en) | 2012-06-28 |
| RU2012118597A (ru) | 2013-11-27 |
| US9430079B2 (en) | 2016-08-30 |
| KR20120083915A (ko) | 2012-07-26 |
| US20120212441A1 (en) | 2012-08-23 |
| CN102656547A (zh) | 2012-09-05 |
| WO2011049513A1 (en) | 2011-04-28 |
| EP2491481A4 (en) | 2014-08-20 |
| JP2013508852A (ja) | 2013-03-07 |
| EP2491481A1 (en) | 2012-08-29 |
| CA2778154A1 (en) | 2011-04-28 |
| AU2010308596A1 (en) | 2012-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5782446B2 (ja) | 接触面上における1つまたは複数の対象用の接触データの決定 | |
| US8482547B2 (en) | Determining the location of one or more objects on a touch surface | |
| EP2491479B1 (en) | Extracting touch data that represents one or more objects on a touch surface | |
| US9626018B2 (en) | Object detection in touch systems | |
| US9134854B2 (en) | Detecting the locations of a plurality of objects on a touch surface | |
| US20190094990A1 (en) | Touch sensing apparatus and method of operating the same | |
| US20170185230A1 (en) | Touch determination with interaction compensation | |
| JP2013508851A (ja) | 二次元補償を用いるタッチ面 | |
| US20110163996A1 (en) | Determining the location of one or more objects on a touth surface | |
| TW201411454A (zh) | 觸控系統中的物件偵測 | |
| EP2433204A1 (en) | Determining the location of an object on a touch surface |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131010 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131010 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140812 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150310 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150413 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150623 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150717 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5782446 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |