JP5776686B2 - 線状マーク検出システム、線状マーク検出方法および線状マーク検出用プログラム - Google Patents
線状マーク検出システム、線状マーク検出方法および線状マーク検出用プログラム Download PDFInfo
- Publication number
- JP5776686B2 JP5776686B2 JP2012506679A JP2012506679A JP5776686B2 JP 5776686 B2 JP5776686 B2 JP 5776686B2 JP 2012506679 A JP2012506679 A JP 2012506679A JP 2012506679 A JP2012506679 A JP 2012506679A JP 5776686 B2 JP5776686 B2 JP 5776686B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- linear mark
- mark
- pixel
- linear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/13—Edge detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Analysis (AREA)
- Traffic Control Systems (AREA)
- Image Processing (AREA)
Description
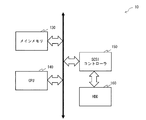
以下、図面を参照して本発明の実施の形態について説明する。図1は本実施の形態にかかる線状マーク検出にかかるシステムの構成を示すブロック図である。当該システムは、コンピュータ10と、画像入力装置20とを備える。
画像入力装置20は、線状マークを検出する対象となる画像を撮像するための装置である。
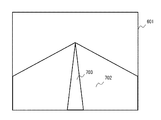
本発明の実施の形態2は、線状マーク検出システムを車線区画線の検出に応用したことを特徴とする。まず、本実施の形態にかかる線状マーク検出システムを含むシステムの動作イメージを、図6及び図7を用いて説明する。当該システムは車両の運転者の運転支援を行う運転支援システムとして動作する。
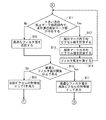
画像の各ピクセルについて、線状マークの内外のピクセル値を用いて複数の線状マーク幅各々に対応するフィルタ値を計算するフィルタ値計算手段と、
前記複数の線状マーク幅各々に対応するフィルタ値から最も適切な値を特徴値とするフィルタ値閾値処理手段と、
前記画像の各ピクセルについて、前記特徴値を前記線状マークにかかる特徴値として出力する特徴値出力手段と、を備えたことを特徴とする線状マーク検出システム。
前記複数の線状マーク幅をグループ化した複数の範囲を設定する線状マーク幅範囲群設定手段と、
前記複数の線状マーク幅各々に対応するフィルタ値から前記範囲についてそれぞれ最適なフィルタ値を選択するフィルタ値選択手段と、を備え、
前記フィルタ値閾値処理手段は、閾値以上の前記最適なフィルタ値の中で最も小さい前記線状マーク幅に相当する前記範囲において選択された前記最適なフィルタ値を前記特徴値とすることを特徴とする付記1に記載の線状マーク検出システム。
前記画像の各ピクセルについて、当該ピクセルが前記線状マークの左右いずれかの一端にあると仮定し、当該ピクセルから前記複数の線状マーク幅を想定して各線状マーク幅内のピクセルのピクセル値の平均値であるマーク内平均ピクセル値を算出するマーク内ピクセル値計算手段と、
前記マーク内フィルタ演算処理手段が使用した各線状マーク幅の範囲の左右の領域内のピクセルのピクセル値の平均値であるマーク外平均ピクセル値を算出するマーク外ピクセル値計算手段と、を備え、
前記フィルタ値計算手段は、前記マーク内平均ピクセル値と、前記マーク外平均ピクセル値と、から算出される演算値により前記フィルタ値を算出することを特徴とする付記1または付記2に記載の線状マーク検出システム。
前記線状マークの両端のピクセルの勾配値を算出するマーク端勾配値計算手段と、
前記線状マーク内でのピクセル値の均一性を算出するマーク内均一性計算手段と、をさらに備え、
前記フィルタ値計算手段は、前記マーク内平均ピクセル値及び前記マーク外平均ピクセル値を用いて算出した演算値と、前記勾配値と、前記均一性と、を用いて前記フィルタ値を算出することを特徴とする付記3に記載の線状マーク検出システム。
前記フィルタ値閾値処理手段は、前記範囲群のうち最も小さい範囲に属する前記最適なフィルタ値から順に前記閾値と比較を行い、前記最適なフィルタ値が前記閾値を超えた時点で比較を中止し、当該前記最適なフィルタ値を処理対象のピクセルにかかる前記特徴値とすることを特徴とする付記2乃至付記4のいずれか1項に記載の線状マーク検出システム。
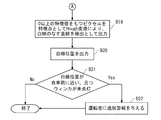
前記画像内において前記特徴値が前記閾値以上であるピクセルを線状マーク特徴点とし、前記線状マーク特徴点が構成する直線または曲線を検出する線状マーク位置検出手段をさらに備えることを特徴とする付記1乃至付記5のいずれか1項に記載の線状マーク検出システム。
前記画像は、車載カメラから撮像された道路画像または前記道路画像から作成された鳥瞰画像であり、前記線状マークは道路面上の車線区画線であることを特徴とする付記1乃至付記6のいずれか1項に記載の線状マーク検出システム。
付記7に記載の線状マーク検出システムと、
前記線状マーク検出システムが検出した前記車線区画線の位置及び種別情報の少なくとも一方を用いて運転者の運転行動を支援する運転支援装置と、を備える運転支援システム。
画像の各ピクセルについて、線状マークの内外のピクセル値を用いて複数の線状マーク幅各々に対応するフィルタ値を計算し、
前記複数の線状マーク幅各々に対応するフィルタ値から最も適切な値を特徴値とし、
前記画像の各ピクセルについて、前記特徴値を前記線状マークにかかる特徴値として出力することを特徴とする線状マーク検出方法。
前記複数の線状マーク幅をグループ化した複数の範囲を設定し、
前記複数の線状マーク幅各々に対応するフィルタ値から前記範囲についてそれぞれ最適なフィルタ値し、
前記最も適切な値を特徴値として選択する処理では、閾値以上の前記最適なフィルタ値の中で最も小さい前記線状マーク幅に相当する前記範囲において選択された前記最適なフィルタ値を前記特徴値とすることを特徴とする付記9に記載の線状マーク検出方法。
前記画像の各ピクセルについて、当該ピクセルが前記線状マークの左右いずれかの一端にあると仮定し、当該ピクセルから前記複数の線状マーク幅を想定して各線状マーク幅内のピクセルのピクセル値の平均値であるマーク内平均ピクセル値を算出し、
前記マーク内フィルタ演算処理手段が使用した各線状マーク幅の範囲の左右の領域内のピクセルのピクセル値の平均値であるマーク外平均ピクセル値を算出し、
前記フィルタ値を計算する処理では、前記マーク内平均ピクセル値と、前記マーク外平均ピクセル値と、から算出される演算値を前記フィルタ値とすることを特徴とする付記9または付記10に記載の線状マーク検出方法。
前記線状マークの両端のピクセルの勾配値を算出し、
前記線状マーク内でのピクセル値の均一性を算出し、
前記フィルタ値を計算する処理では、前記マーク内平均ピクセル値及び前記マーク外平均ピクセル値を用いて算出した演算値と、前記勾配値と、前記均一性と、を用いて前記フィルタ値を算出することを特徴とする付記11に記載の線状マーク検出方法。
前記最も適切な値を特徴値として選択する処理では、前記範囲群のうち最も小さい範囲に属する前記最適なフィルタ値から順に前記閾値と比較を行い、前記最適なフィルタ値が前記閾値を超えた時点で比較を中止し、当該前記最適なフィルタ値を処理対象のピクセルにかかる前記特徴値とすることを特徴とする付記10乃至付記12のいずれか1項に記載の線状マーク検出方法。
前記画像内において前記特徴値が前記閾値以上であるピクセルを線状マーク特徴点とし、前記線状マーク特徴点が構成する直線または曲線を検出することを特徴とする付記9乃至付記13のいずれか1項に記載の線状マーク検出方法。
前記画像は、車載カメラから撮像された道路画像または前記道路画像から作成された鳥瞰画像であり、前記線状マークは道路面上の車線区画線であることを特徴とする付記9乃至付記14のいずれか1項に記載の線状マーク検出方法。
線状マークを検出するための検出処理をコンピュータに実行させるプログラムが格納された非一時的なコンピュータ可読媒体であって、
前記検出処理は、
画像の各ピクセルについて、線状マークの内外のピクセル値を用いて複数の線状マーク幅各々に対応するフィルタ値を計算し、
前記複数の線状マーク幅各々に対応するフィルタ値から最も適切な値を特徴値とし、
前記画像の各ピクセルについて、前記特徴値を前記線状マークにかかる特徴値として出力することを特徴とする線状マーク検出プログラムが格納された非一時的なコンピュータ可読媒体。
前記検出処理は、
前記複数の線状マーク幅をグループ化した複数の範囲を設定し、
前記複数の線状マーク幅各々に対応するフィルタ値から前記範囲についてそれぞれ最適なフィルタ値し、
前記最も適切な値を特徴値として選択する処理では、閾値以上の前記最適なフィルタ値の中で最も小さい前記線状マーク幅に相当する前記範囲において選択された前記最適なフィルタ値を前記特徴値とすることを特徴とする付記16に記載の線状マーク検出プログラムが格納された非一時的なコンピュータ可読媒体。
前記検出処理は、
前記画像の各ピクセルについて、当該ピクセルが前記線状マークの左右いずれかの一端にあると仮定し、当該ピクセルから前記複数の線状マーク幅を想定して各線状マーク幅内のピクセルのピクセル値の平均値であるマーク内平均ピクセル値を算出し、
前記マーク内フィルタ演算処理手段が使用した各線状マーク幅の範囲の左右の領域内のピクセルのピクセル値の平均値であるマーク外平均ピクセル値を算出し、
前記フィルタ値を計算する処理では、前記マーク内平均ピクセル値と、前記マーク外平ピクセル値と、から算出される演算値を前記フィルタ値とすることを特徴とする付記16または付記17に記載の線状マーク検出プログラムが格納された非一時的なコンピュータ可読媒体。
前記検出処理は、
前記線状マークの両端のピクセルの勾配値を算出し、
前記線状マーク内でのピクセル値の均一性を算出し、
前記フィルタ値を計算する処理では、前記マーク内平均ピクセル値及び前記マーク外平均ピクセル値を用いて算出した演算値と、前記勾配値と、前記均一性と、を用いて前記フィルタ値を算出することを特徴とする付記18に記載の線状マーク検出プログラムが格納された非一時的なコンピュータ可読媒体。
前記最も適切な値を特徴値として選択する処理では、前記範囲群のうち最も小さい範囲に属する前記最適なフィルタ値から順に前記閾値と比較を行い、前記最適なフィルタ値が前記閾値を超えた時点で比較を中止し、当該前記最適なフィルタ値を処理対象のピクセルにかかる前記特徴値とすることを特徴とする付記17乃至付記19のいずれか1項に記載の線状マーク検出プログラムが格納された非一時的なコンピュータ可読媒体。
前記画像内において前記特徴値が前記閾値以上であるピクセルを線状マーク特徴点とし、前記線状マーク特徴点が構成する直線または曲線を検出することを特徴とする付記16乃至付記20のいずれか1項に記載の線状マーク検出プログラムが格納された非一時的なコンピュータ可読媒体。
前記画像は、車載カメラから撮像された道路画像または前記道路画像から作成された鳥瞰画像であり、前記線状マークは道路面上の車線区画線であることを特徴とする付記16乃至付記21のいずれか1項に記載の線状マーク検出プログラムが格納された非一時的なコンピュータ可読媒体。
100 線状マーク検出システム
101 マーク幅群設定部
102 マーク内平均ピクセル値計算部
103 マーク外平均ピクセル値計算部
104 フィルタ値計算部
105 フィルタ値選択部
106 フィルタ値閾値処理部
107 特徴値出力部
108 鳥瞰画像作成部
109 大小マーク幅範囲群設定部
110 Hough変換部
111 マーク位置出力部
130 メインメモリ
140 CPU
150 SCSIコントローラ
160 HDD
20 画像入力装置
30 車線逸脱警報装置
Claims (10)
- 画像の各ピクセルについて、当該ピクセルが線状マークの左右いずれかの一端にあると仮定し、当該ピクセルから複数の線状マーク幅を想定して各線状マーク幅内のピクセルを線状マーク内のピクセルとし、前記各線状マーク幅の範囲の左右の領域内のピクセルを線状マーク外のピクセルとし、前記線状マーク内外のピクセル値を用いて前記複数の線状マーク幅各々に対応するフィルタ値を計算するフィルタ値計算手段と、
前記複数の線状マーク幅各々に対応するフィルタ値から最も適切な値を特徴値とするフィルタ値閾値処理手段と、
前記画像の各ピクセルについて、前記特徴値を前記線状マークにかかる特徴値として出力する特徴値出力手段と、を備えたことを特徴とする線状マーク検出システム。 - 前記複数の線状マーク幅をグループ化した複数の範囲を設定する線状マーク幅範囲群設定手段と、
前記複数の線状マーク幅各々に対応するフィルタ値から前記範囲についてそれぞれ最適なフィルタ値を選択するフィルタ値選択手段と、を備え、
前記フィルタ値閾値処理手段は、閾値以上の前記最適なフィルタ値の中で最も小さい前記線状マーク幅に相当する前記範囲において選択された前記最適なフィルタ値を前記特徴値とすることを特徴とする請求項1に記載の線状マーク検出システム。 - 前記各線状マーク幅内のピクセルのピクセル値の平均値であるマーク内平均ピクセル値を算出するマーク内ピクセル値計算手段と、
前記各線状マーク幅の範囲の左右の領域内のピクセルのピクセル値の平均値であるマーク外平均ピクセル値を算出するマーク外ピクセル値計算手段と、を備え、
前記フィルタ値計算手段は、前記マーク内平均ピクセル値と、前記マーク外平均ピクセル値と、から算出される演算値により前記フィルタ値を算出することを特徴とする請求項1または請求項2に記載の線状マーク検出システム。 - 前記線状マークの両端のピクセルの勾配値を算出するマーク端勾配値計算手段と、
前記線状マーク内でのピクセル値の均一性を算出するマーク内均一性計算手段と、をさらに備え、
前記フィルタ値計算手段は、前記マーク内平均ピクセル値及び前記マーク外平均ピクセル値を用いて算出した演算値と、前記勾配値と、前記均一性と、を用いて前記フィルタ値を算出することを特徴とする請求項3に記載の線状マーク検出システム。 - 前記フィルタ値閾値処理手段は、前記範囲群のうち最も小さい範囲に属する前記最適なフィルタ値から順に前記閾値と比較を行い、前記最適なフィルタ値が前記閾値を超えた時点で比較を中止し、当該前記最適なフィルタ値を処理対象のピクセルにかかる前記特徴値とすることを特徴とする請求項2乃至請求項4のいずれか1項に記載の線状マーク検出システム。
- 前記画像内において前記特徴値が前記閾値以上であるピクセルを線状マーク特徴点とし、前記線状マーク特徴点が構成する直線または曲線を検出する線状マーク位置検出手段をさらに備えることを特徴とする請求項1乃至請求項5のいずれか1項に記載の線状マーク検出システム。
- 前記画像は、車載カメラから撮像された道路画像または前記道路画像から作成された鳥瞰画像であり、前記線状マークは道路面上の車線区画線であることを特徴とする請求項1乃至請求項6のいずれか1項に記載の線状マーク検出システム。
- 請求項7に記載の線状マーク検出システムと、
前記線状マーク検出システムが検出した前記車線区画線の位置及び種別情報の少なくとも一方を用いて運転者の運転行動を支援する運転支援装置と、を備える運転支援システム。 - 画像の各ピクセルについて、当該ピクセルが線状マークの左右いずれかの一端にあると仮定し、当該ピクセルから複数の線状マーク幅を想定して各線状マーク幅内のピクセルを線状マーク内のピクセルとし、前記各線状マーク幅の範囲の左右の領域内のピクセルを線状マーク外のピクセルとし、前記線状マーク内外のピクセル値を用いて前記複数の線状マーク幅各々に対応するフィルタ値を計算し、
前記複数の線状マーク幅各々に対応するフィルタ値から最も適切な値を特徴値とし、
前記画像の各ピクセルについて、前記特徴値を前記線状マークにかかる特徴値として出力することを特徴とする線状マーク検出方法。 - 線状マークを検出するための検出処理をコンピュータに実行させるプログラムであって、
前記検出処理は、
画像の各ピクセルについて、当該ピクセルが線状マークの左右いずれかの一端にあると仮定し、当該ピクセルから複数の線状マーク幅を想定して各線状マーク幅内のピクセルを線状マーク内のピクセルとし、前記各線状マーク幅の範囲の左右の領域内のピクセルを線状マーク外のピクセルとし、前記線状マーク内外のピクセル値を用いて前記複数の線状マーク幅各々に対応するフィルタ値を計算し、
前記複数の線状マーク幅各々に対応するフィルタ値から最も適切な値を特徴値とし、
前記画像の各ピクセルについて、前記特徴値を前記線状マークにかかる特徴値として出力することを特徴とする線状マーク検出プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012506679A JP5776686B2 (ja) | 2010-03-23 | 2010-12-16 | 線状マーク検出システム、線状マーク検出方法および線状マーク検出用プログラム |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010066580 | 2010-03-23 | ||
| JP2010066580 | 2010-03-23 | ||
| JP2012506679A JP5776686B2 (ja) | 2010-03-23 | 2010-12-16 | 線状マーク検出システム、線状マーク検出方法および線状マーク検出用プログラム |
| PCT/JP2010/007303 WO2011117950A1 (ja) | 2010-03-23 | 2010-12-16 | 線状マーク検出システム、線状マーク検出方法および線状マーク検出用プログラムが格納された非一時的なコンピュータ可読媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2011117950A1 JPWO2011117950A1 (ja) | 2013-07-04 |
| JP5776686B2 true JP5776686B2 (ja) | 2015-09-09 |
Family
ID=44672547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012506679A Active JP5776686B2 (ja) | 2010-03-23 | 2010-12-16 | 線状マーク検出システム、線状マーク検出方法および線状マーク検出用プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8948519B2 (ja) |
| JP (1) | JP5776686B2 (ja) |
| WO (1) | WO2011117950A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3098753A1 (en) * | 2015-05-28 | 2016-11-30 | Tata Consultancy Services Limited | Lane detection |
| EP3567518B1 (en) | 2018-05-08 | 2022-05-18 | Aptiv Technologies Limited | Lane marker recognition |
| CN111932605B (zh) * | 2020-09-11 | 2023-12-01 | 广东韶钢松山股份有限公司 | 尺寸检测方法、装置、电子设备及可读存储介质 |
| US12242519B2 (en) * | 2022-12-14 | 2025-03-04 | Here Global B.V. | Method, apparatus, and system for providing linear feature detection of cartographic features |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6591000B1 (en) * | 1998-04-21 | 2003-07-08 | Denso Corporation | Apparatus and method for preprocessing a picked-up image, lane mark recognizing system, related vehicle traveling control system, and recording media |
| JP3102478B2 (ja) | 1998-08-17 | 2000-10-23 | 日本電気株式会社 | 線状マーク検出方法および装置 |
| JP4032727B2 (ja) * | 2001-12-12 | 2008-01-16 | アイシン精機株式会社 | 車線境界検出装置 |
| JP4222411B2 (ja) | 2006-11-08 | 2009-02-12 | 日本電気株式会社 | 消失点検出システム、消失点検出方法および消失点検出用プログラム |
| JP2008225953A (ja) * | 2007-03-14 | 2008-09-25 | Toyota Motor Corp | 白線認識装置及び方法 |
| JP4697480B2 (ja) | 2008-01-11 | 2011-06-08 | 日本電気株式会社 | 車線認識装置、車線認識方法および車線認識プログラム |
-
2010
- 2010-12-16 JP JP2012506679A patent/JP5776686B2/ja active Active
- 2010-12-16 WO PCT/JP2010/007303 patent/WO2011117950A1/ja not_active Ceased
- 2010-12-16 US US13/636,050 patent/US8948519B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20130004084A1 (en) | 2013-01-03 |
| WO2011117950A1 (ja) | 2011-09-29 |
| US8948519B2 (en) | 2015-02-03 |
| JPWO2011117950A1 (ja) | 2013-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5906224B2 (ja) | 車外環境認識装置 | |
| JP6635188B2 (ja) | 物体認識装置、物体認識方法及び物体認識プログラム | |
| JP6347827B2 (ja) | 車線境界線を検出する方法、装置、およびデバイス | |
| JP4416039B2 (ja) | 縞模様検知システム、縞模様検知方法および縞模様検知用プログラム | |
| US20130070095A1 (en) | Fast obstacle detection | |
| JP6237875B2 (ja) | 自己位置算出装置及び自己位置算出方法 | |
| JP6187672B2 (ja) | 自己位置算出装置及び自己位置算出方法 | |
| JP2019211831A (ja) | 物体認識装置 | |
| JP2004145852A (ja) | レーンマーカー位置検出方法及びレーンマーカー位置検出装置並びに車線逸脱警報装置 | |
| JP6237874B2 (ja) | 自己位置算出装置及び自己位置算出方法 | |
| JP6139465B2 (ja) | 物体検出装置、運転支援装置、物体検出方法、および物体検出プログラム | |
| JP5776686B2 (ja) | 線状マーク検出システム、線状マーク検出方法および線状マーク検出用プログラム | |
| EP3384429A1 (en) | Method for identification of candidate points as possible characteristic points of a calibration pattern within an image of the calibration pattern | |
| WO2011074087A1 (ja) | 信号認識装置、信号認識方法、及び信号認識プログラム | |
| KR101178508B1 (ko) | 차량 충돌 경보 시스템 및 방법 | |
| JP2015064752A (ja) | 車両監視装置、および車両監視方法 | |
| JP4962304B2 (ja) | 歩行者検出装置 | |
| KR101405085B1 (ko) | 차량녹화영상분석 방법 및 장치 | |
| US11145063B2 (en) | Image processing apparatus | |
| JP2012252501A (ja) | 走行路認識装置及び走行路認識用プログラム | |
| JP2010286995A (ja) | 車両用画像処理システム | |
| JP5955357B2 (ja) | 照射制御装置 | |
| CN104517099A (zh) | 滤波装置和环境识别系统 | |
| JP6174960B2 (ja) | 車外環境認識装置 | |
| JP6569416B2 (ja) | 画像処理装置、物体認識装置、機器制御システム、画像処理方法及び画像処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150303 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150416 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150609 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150622 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5776686 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |