JP5765483B2 - 光センサ - Google Patents
光センサ Download PDFInfo
- Publication number
- JP5765483B2 JP5765483B2 JP2014506127A JP2014506127A JP5765483B2 JP 5765483 B2 JP5765483 B2 JP 5765483B2 JP 2014506127 A JP2014506127 A JP 2014506127A JP 2014506127 A JP2014506127 A JP 2014506127A JP 5765483 B2 JP5765483 B2 JP 5765483B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- light emitting
- phase difference
- reflected light
- emitting elements
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000003287 optical effect Effects 0.000 title claims description 42
- 238000001514 detection method Methods 0.000 claims description 36
- 239000000758 substrate Substances 0.000 claims description 28
- 238000004364 calculation method Methods 0.000 claims description 18
- 238000000034 method Methods 0.000 description 26
- 210000003811 finger Anatomy 0.000 description 12
- 238000010586 diagram Methods 0.000 description 9
- 239000011347 resin Substances 0.000 description 7
- 229920005989 resin Polymers 0.000 description 7
- 230000003321 amplification Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 238000005314 correlation function Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 210000004932 little finger Anatomy 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P13/00—Indicating or recording presence, absence, or direction, of movement
- G01P13/02—Indicating direction only, e.g. by weather vane
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P13/00—Indicating or recording presence, absence, or direction, of movement
- G01P13/02—Indicating direction only, e.g. by weather vane
- G01P13/04—Indicating positive or negative direction of a linear movement or clockwise or anti-clockwise direction of a rotational movement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/50—Systems of measurement based on relative movement of target
- G01S17/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K2217/00—Indexing scheme related to electronic switching or gating, i.e. not by contact-making or -breaking covered by H03K17/00
- H03K2217/94—Indexing scheme related to electronic switching or gating, i.e. not by contact-making or -breaking covered by H03K17/00 characterised by the way in which the control signal is generated
- H03K2217/941—Indexing scheme related to electronic switching or gating, i.e. not by contact-making or -breaking covered by H03K17/00 characterised by the way in which the control signal is generated using an optical detector
- H03K2217/94111—Indexing scheme related to electronic switching or gating, i.e. not by contact-making or -breaking covered by H03K17/00 characterised by the way in which the control signal is generated using an optical detector having more than one emitter
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- Human Computer Interaction (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Geophysics And Detection Of Objects (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Position Input By Displaying (AREA)
Description
本発明は、発光素子と受光素子を用いて被検出物体の存在や移動を検知する光センサに関する。
一般に、発光素子と受光素子を用いて指や手等の被検出物体の移動を検知する光センサが知られている(例えば、特許文献1、非特許文献1参照)。このような従来技術による光センサは、1個の受光素子の周囲を取囲んで3個の発光素子を設け、3個の発光素子毎に被検出物体からの反射光を受光して、3つの反射光の位相差に基づいて被検出物体の移動を検知する。
"Silicon Labs AN580", [online], インターネット<URL:http://www.silabs.com/pages/DownloadDoc.aspx?FILEURL=Support%20Documents/TechnicalDocs/AN580.pdf&src=DocumentationWebPart>
特許文献1に記載された光センサでは、3つの反射光が所定の閾値よりも大きくなる立上り時または所定の閾値よりも小さくなる立下り時をそれぞれ検出し、この立上り時または立下り時の時間差に基づいて位相差を求める。非特許文献1に記載された光センサでは、3つの反射光の波形のピークをそれぞれ検出し、このピークの時間差に基づいて位相差を求める。しかし、これらの方法では、受光素子に流れる3個の電流値の波形が相互に異なるときには、反射光の位相差を正確に求めることができず、移動方向の誤検知が発生するという問題がある。
本発明は前述の問題に鑑みなされたものであり、本発明の目的は、移動方向の誤検知を抑制することができる光センサを提供することにある。
(1).上記課題を解決するために、本発明は、基板と、該基板の表面に実装された少なくとも3個の発光素子と、該少なくとも3個の発光素子の発光動作を制御する発光制御手段と、前記基板の表面に実装された少なくとも1個の受光素子とを備え、前記発光素子から出射された光が、被検出物体によって反射された光を前記受光素子で受光することによって該被検出物体の存在および移動を検知する光センサにおいて、前記少なくとも3個の発光素子による光が前記被検出物体によって反射された光を前記受光素子によって受光し、前記受光素子から出力される光検出信号に基づいて、前記3個の発光素子による光に対応した3つの反射光信号を取得する反射光信号取得手段と、3つの前記反射光信号の波形全体の差または相関に基づいて各々の位相差を求める位相差演算手段と、少なくとも2つの前記位相差に基づいて前記被検出物体の移動方向を特定する移動方向特定手段とを備えることを特徴としている。
本発明によれば、少なくとも3個の発光素子を用いるから、例えば3個の発光素子の光を被検出物体が反射したときに、各々の反射光の位相差を検出することによって、基板の表面に平行な2軸方向の動作を検知することができる。また、反射光の強度を検出することによって、基板に垂直な方向の動作も検知することができる。
また、位相差演算手段は、3つの反射光信号の波形全体の差または相関に基づいて各々の位相差を求めるから、受光素子に流れる3個の電流値の波形が相互に異なるときでも、これらの波形全体の差や相関を考慮して各々の位相差を求めることができる。このため、反射光信号のピーク等によって位相差を求める場合に比べて、位相差の検出精度を高めることができる。そして、移動方向特定手段は、位相差演算手段によって求めた位相差を用いて被検出物体の移動方向を判定するから、移動方向の誤検知を抑制することができる。
(2).本発明では、前記位相差演算手段は、2つの前記反射光信号の位相差を求めるときには、一方の前記反射光信号を所定のシフト量だけ時間をシフトさせた状態で、他方の前記反射光信号との間の差の二乗を波形全体で加算し、この加算値が最小となるシフト量を位相差としている。
本発明によれば、位相差演算手段は、2つの反射光信号の位相差を求めるときには、一方の反射光信号を所定のシフト量だけ時間をシフトさせた状態で、他方の反射光信号との間の差の二乗を波形全体で加算し、この加算値が最小となるシフト量を位相差とする。このため、2つの反射光信号の波形全体の差を考慮して位相差を求めることができ、位相差の検出精度を高めることができる。
(3).本発明では、前記位相差演算手段は、2つの前記反射光信号の位相差を求めるときには、一方の前記反射光信号を所定のシフト量だけ時間をシフトさせた状態で、2つの前記反射光信号の積和演算を行い、この演算値が最大となるシフト量を位相差としている。
本発明によれば、位相差演算手段は、2つの反射光信号の位相差を求めるときには、一方の反射光信号を所定のシフト量だけ時間をシフトさせた状態で、2つの反射光信号の積和演算を行い、この演算値が最大となるシフト量を位相差とする。このため、2つの反射光信号の波形全体の相互相関を考慮して位相差を求めることができ、位相差の検出精度を高めることができる。
(4).本発明では、前記発光制御手段は、前記少なくとも3個の発光素子の各々をパルス発光で、かつ時分割発光させる。
本発明によれば、発光制御手段は、少なくとも3個の発光素子の各々をパルス発光で、かつ時分割発光させるから、1個の受光素子によって、各々の発光素子による反射光を検出することができる。このため、受光素子の個数を低減することができ、部品点数を削減して製造コストを低減することができる。
(5).本発明では、前記発光素子は面発光レーザである。
本発明によれば、発光素子は面発光レーザであるから、例えば発光ダイオード等を用いた場合に比べて、光の出射角を小さくすることができ、検知分解能を上げ、S/Nを向上させることができる。
以下、本発明の実施の形態による光センサについて、図面を参照しつつ詳細に説明する。
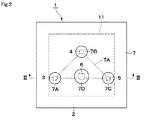
図1ないし図4に、第1の実施の形態による光センサ1を示す。光センサ1は、基板2、発光素子3〜5、受光素子6、信号処理回路11等を備える。
基板2は、絶縁材料を用いて形成された平板である。基板2としては、例えばプリント配線基板が用いられる。基板2の表面2Aには、発光素子3〜5と受光素子6とが実装される。
発光素子3〜5は、基板2の表面2Aに実装され、赤外線や可視光線の光を出射する。発光素子3〜5の光軸は通常、例えば基板2の表面2Aに対して垂直方向(Z軸方向)である。発光素子3〜5としては、例えば発光ダイオード(LED)、レーザダイオード(LD)、面発光レーザ(VCSEL)が用いられる。検知分解能を上げ、S/Nを向上させるためには、素子として元々出射角の小さいVCSELを発光素子3〜5として用いるのが好ましい。
3個の発光素子3〜5は、基板2の表面2A上で一直線に並ばない位置に配置される。このため、基板2の表面2Aには、3個の発光素子3〜5の内部に三角形領域TAが形成される。
受光素子6は、基板2の表面2Aに実装され、赤外線や可視光線の光を受光する。受光素子6としては、例えばフォトダイオード(PD)、フォトトランジスタ等が用いられる。受光素子6は、基板2の表面2Aの三角形領域TAの範囲内に配置される。なお、受光素子6は、三角形領域TAの外側に配置してもよい。
基板2の表面2Aには、透明樹脂層7が形成される。透明樹脂層7は、基板2の表面2Aを全面に亘って覆い、発光素子3〜5および受光素子6を封止する。透明樹脂層7には、各発光素子3〜5と対応した位置に発光素子用レンズ7A〜7Cが形成される。発光素子用レンズ7A〜7Cは、上方に突出した略半球形状に形成される。
発光素子用レンズ7A〜7Cの中心と発光素子3〜5の実装位置とは、一致する。このため、発光素子3〜5からの光束の光軸は、Z軸方向に沿っている。なお、発光素子用レンズ7A〜7Cの中心と発光素子3〜5の実装位置とをずらすことによって、発光素子3〜5からの光束の光軸をZ軸方向から傾斜させてもよい。この場合、後述する位相差T21,T32が大きくなるように、発光素子3〜5からの光束の光軸を三角形領域TAの外側に向けて出射させるのが好ましい。
また、透明樹脂層7には、受光素子6と対応した位置に受光素子用レンズ7Dが形成される。受光素子用レンズ7Dも、発光素子用レンズ7A〜7Cと同様に半球形状に形成される。受光素子用レンズ7Dは、外部から入射される光を受光素子6に集光する。
なお、発光素子用レンズ7A〜7Cおよび受光素子用レンズ7Dは、発光素子3〜5および受光素子6を封止する透明樹脂層7に一体的に形成したが、透明樹脂層7とは別個に設けてもよい。
次に、発光素子3〜5および受光素子6に接続された信号処理回路11について説明する。
図4に示すように、信号処理回路11は、発光素子駆動部12、光検出信号増幅部13、フィルタ部14および演算処理部15を備える。
発光素子駆動部12は、演算処理部15と協働して発光制御手段を構成する。発光素子駆動部12は、発光素子3〜5に接続され、演算処理部15からの制御信号に基づいて発光信号St1〜St3を出力する。具体的には、発光素子駆動部12は、発光素子3〜5を発光させるための駆動電流を、発光素子3〜5に供給する。
光検出信号増幅部13は、受光素子6に接続され、受光素子6から供給された光検出信号S0に対して電流−電圧変換を行い、電流−電圧変換された光検出信号S0を増幅する。フィルタ部14は、光検出信号増幅部13の後段に接続され、光検出信号増幅部13から出力された光検出信号S0からノイズを除去する。
そして、信号処理回路11は、発光素子駆動部12を用いて発光素子3〜5を駆動し、光検出信号増幅部13およびフィルタ部14を用いて被検出物体Objからの反射光に応じた光検出信号S0を演算処理部15に向けて出力する。
演算処理部15は、例えばマイクロプロセッサであり、発光素子3〜5の発光を制御する処理、光検出信号S0から発光素子3〜5に対応した3つの反射光信号Sr1〜Sr3に分離する処理、3つの反射光信号Sr1〜Sr3に基づいて被検出物体Objの存在や移動を検知する処理、光センサ1の全体的な制御等を行う。
具体的には、演算処理部15は、発光素子3〜5の検出光の強度やタイミングを制御するための制御信号を発光素子駆動部12に供給し、この制御信号に対応するように発光素子3〜5を発光させる。ここで、発光素子駆動部12は、発光信号St1〜St3としてパルス状の駆動電流を発光素子3〜5にそれぞれ供給する。発光信号St1〜St3のパルスは、一定の発光間隔T0を有すると共に、発光素子3〜5毎に異なるタイミングで出力される。これにより、発光素子3〜5は、各々をパルス発光で、かつ時分割発光する(図5参照)。
なお、発光素子3〜5は、時分割でパルス発光すればよい。このため、例えば発光素子3の発光が停止するのと同時に、次なる発光素子4の発光を開始してもよい。
また、演算処理部15は、図6に示すプログラムを実行する。このプログラムでは、以下に示す手順によって、被検出物体Objの移動方向を特定する。
ステップ1では、受光素子6から光検出信号増幅部13およびフィルタ部14を介して供給された光検出信号S0を読込む。ステップ2では、光検出信号S0から3つの反射光信号Sr1〜Sr3を分離する。
ここで、発光素子3〜5は互いに異なるタイミングで時分割発光するから、発光素子3〜5の発光タイミング毎に、それぞれの発光素子3〜5からの光を被検出物体Objが反射した反射光が受光される。このため、光検出信号S0から発光信号St1〜St3と同期した3つの信号を取り出すことによって、それぞれの発光素子3〜5からの光に基づく反射光の信号を分離することができる。
そこで、演算処理部15は、光検出信号S0を発光素子3〜5の発光タイミング毎に取り出し、発光素子3〜5の反射光に応じた3つの反射光信号Sr1〜Sr3に分離する。このとき、反射光信号Sr1〜Sr3は、発光タイミング毎に抽出したパルス状の光検出信号S0を包絡線検波したものに相当する。
この場合、1個の受光素子6によって各々の発光素子3〜5による反射光を検出することができるから、受光素子6の個数を低減することができ、部品点数を削減して製造コストを低減することができる。
続くステップ3では、反射光信号Sr1,Sr2間の位相差T21を演算し、ステップ4では、反射光信号Sr2,Sr3間の位相差T32を演算する。このとき、位相差T21,T32は、反射光信号Sr1〜Sr3の波形全体の差に基づいて演算する。そして、ステップ5では、これらの位相差T21,T32に基づいて、被検出物体Objの移動方向を特定する。
次に、図6中のステップ3に示す位相差T21の演算処理について、図7を参照して説明する。
ステップ11では、反射光信号Sr1,Sr2に基づいて、波形全体の差分を計算するための範囲として、波形の開始時刻t0と終了時刻t1を決める。ここでは、反射光信号Sr2が所定の閾値よりも増加する立上り時刻を開始時刻t0とし、反射光信号Sr2が所定の閾値よりも減少する立下り時刻を終了時刻t1とした場合を例に挙げて説明する。
なお、開始時刻t0と終了時刻t1は、上述したものに限らず、例えば反射光信号Sr1の立上り時刻と立下り時刻に設定してもよい。また、反射光信号Sr1,Sr2のうち立上り時刻と立下り時刻の時間差が大きいものに基づいて、開始時刻t0と終了時刻t1を設定してもよく、立上り時刻と立下り時刻の時間差が小さいものに基づいて、開始時刻t0と終了時刻t1を設定してもよい。さらに、反射光信号Sr1,Sr2のうち立上り時刻が早いものに基づいて、開始時刻t0と終了時刻t1を設定してもよい。また、被検出物体Objの大きさや移動速度が予測可能な場合には、これらに基づいて、開始時刻t0と終了時刻t1との時間差を予め設定しておいてもよい。
ステップ12では、反射光信号Sr1,Sr2に基づいて、位相差T21の検出範囲として、反射光信号Sr2の波形を負側または正側にシフトさせる最大値(±x0)を決める。シフト量xの最大値(±x0)は、例えば反射光信号Sr2の波形の開始時刻t0と終了時刻t1との時間差に基づいて設定する。シフト量の最大値(±x0)は、例えば反射光信号Sr2の波形の開始時刻t0と終了時刻t1との時間差と同程度の値でもよく、半分程度の値でもよい。
なお、シフト量の最大値(±x0)は、反射光信号Sr2の波形の開始時刻t0と終了時刻t1との時間差よりも小さい値に設定してもよく、大きい値に設定してもよい。また、シフト量の最大値(±x0)は、反射光信号Sr1の波形に基づいて設定してもよい。シフト量の最大値(±x0)が実験的に予測可能であれば、シフト量の最大値(±x0)を、実験に基づく値に予め設定しておいてもよい。
ステップ13では、シフト量xを初期値としての負の最大値(−x0)に設定する。ステップ14では、以下の数1に示す関数Zd1(x)を用いて、反射光信号Sr2をシフト量xだけ時間をシフトさせ、この状態で反射光信号Sr1との差分の二乗和を演算する。なお、関数Zd1(x)は離散値の総和を演算するものとしたが、連続値の積分を演算してもよい。

続くステップ15では、シフト量xを予め設定された所定値Δx(Δx>0)だけ増加させ、ステップ16では、シフト量xが正の最大値(+x0)よりも大きいか否かを判定する。所定値Δxは、位相差T21の検出間隔に相当し、最大値(+x0)よりも小さい値に設定される。
そして、ステップ16で「NO」と判定したときには、ステップ14,15の処理を繰り返す。一方、ステップ16で「YES」と判定したときには、シフト量xが正の最大値(+x0)よりも大きくなっているから、ステップ17に移行して、関数Zd1(x)が最小となるシフト量x21を位相差T21として出力する。
次に、図6中のステップ4に示す位相差T32の演算処理について、図8を参照して説明する。
位相差T32の演算処理によるステップ21〜27は、位相差T21の演算処理によるステップ11〜17とほぼ同様である。このため、ステップ21では、反射光信号Sr2,Sr3に基づいて、波形全体の差分を計算するための範囲として、波形の開始時刻t0と終了時刻t1を決める。ステップ22では、反射光信号Sr2,Sr3に基づいて、位相差T32の検出範囲として、反射光信号Sr2の波形を負側または正側にシフトさせる最大値(±x0)を決める。ステップ21,22では、例えばステップ11,12と同じ値の時刻t0,t1とシフト量xの最大値(±x0)が設定される。
ステップ23では、シフト量xを初期値としての負の最大値(−x0)に設定する。ステップ24では、以下の数2に示す関数Zd2(x)を用いて、反射光信号Sr3をシフト量xだけ時間をシフトさせ、この状態で反射光信号Sr2との差分の二乗和を演算する。なお、関数Zd2(x)は離散値の総和を演算するものとしたが、連続値の積分を演算してもよい。
続くステップ25では、シフト量xを予め設定された所定値Δx(Δx>0)だけ増加させ、ステップ26では、シフト量xが正の最大値(+x0)よりも大きいか否かを判定する。そして、ステップ26で「NO」と判定したときには、ステップ24,25の処理を繰り返す。一方、ステップ26で「YES」と判定したときには、ステップ27に移行して、関数Zd2(x)が最小となるシフト量x32を位相差T32として出力する。
なお、位相差T21,T32の精度を高めるためには、波形の範囲としての開始時刻t0と終了時刻t1との時間差と、シフト量xの範囲となる最大値(±x0)はできるだけ大きな値に設定した方がよく、所定値Δxはできるだけ小さい値に設定した方がよい。しかし、波形の範囲とシフト量xの範囲が大きくなり、所定値Δxが小さくなるに従って、演算量の増大や処理速度の低下が発生する。このため、位相差T21,T32の精度が許容できる範囲で、積分の範囲とシフト量xの範囲はできるだけ小さい値に設定され、所定値Δxはできるだけ大きい値に設定される。
次に、図6中のステップ5に示す移動方向の特定処理について、図9ないし図12を参照して説明する。
ステップ31では、以下の数3の式に基づいて、位相差T21と位相差T32の比率f(θ)を求める。
続くステップ32では、位相差T21,T32の比率f(θ)を、図12に示すマップMに当てはめることによって、被検出物体Objの移動方向を特定する。
ここで、マップMの具体的な作成方法について説明する。図10に示すように、例えば発光素子3〜5を円周上に配置すると共に、円周の中心に対して右側位置を0°としたときに、発光素子3を180°の位置に配置し、発光素子4を90°の位置に配置し、発光素子5を0°の位置に配置した場合を考える。被検出物体Objの移動速度は等速と仮定し、被検出物体Objが0°方向に進むものとし、光センサ1を回転させたときの角度(回転角度)をθとする。角度θを変化させると、0°方向に対する発光素子3,4間の距離L21と発光素子4,5間の距離L32が幾何学的に変化する。また、被検出物体Objが等速で移動すると仮定すると、距離La,Lbは、被検出物体Objが移動するときの所要時間(位相差T21,T32)から見積もることができる。
この場合、距離L21,L32の比率は、数3の式に示す比率f(θ)に一致すると共に、以下の数4に示すように、幾何学的に角度θを変数とする関数になる。
この比率f(θ)と角度θとの関係を図示すると、図11に示す通りとなる。距離L21が正の場合(L21>0)と負の場合(L21<0)とで場合分けすると、角度θと比率f(θ)が一対一で対応する。従って、比率f(θ)に基づいて、被検出物体Objの移動方向となる角度θを求めることができる。
図12に示すマップMは、単純化のために、比率f(θ)の範囲によって角度θを30°刻みで求めたものである。ここで、正側の第1閾値f1は、角度θが165°または345°の場合の比率f(θ)であり、負側の第1閾値(−f1)は、角度θが105°または285°の場合の比率f(θ)である。また、正側の第2閾値f2は、角度θが15°または195°の場合の比率f(θ)であり、負側の第2閾値(−f2)は、角度θが75°または255°の場合の比率f(θ)である。
なお、前述では、発光素子3〜5を円周上で所定の角度位置に配置した場合を例に挙げて説明したが、これらの角度位置は適宜設定することができる。また、発光素子3〜5は必ずしも円周上に配置する必要はなく、基板2上の任意の位置に配置することができる。さらに、マップMを用いずに、数4の式を用いて角度θを直接的に逆算してもよい。
次に、図13ないし図19を用いて、光センサ1による被検出物体Objの検出動作について説明する。
光センサ1が駆動すると、発光素子3〜5は基板2の上方に向けて光を出射する。この状態で基板2の上方を手や指等の被検出物体Objが通過すると、発光素子3〜5の光路を被検出物体Objが遮る。これにより、被検出物体Objは発光素子3〜5からの光を反射する。この反射光は受光素子6によって受光され、受光素子6は、反射光の強度に応じた電流を光検出信号S0として出力する。
演算処理部15は、受光素子6からの光検出信号S0から3つの反射光信号Sr1〜Sr3を分離し、これらの位相差T21,T32を演算する。そして、演算処理部15は、2つの位相差T21,T32に基づいて、被検出物体Objの移動方向、位置、移動速度等を特定する。
移動方向等の特定方法は、以下に示す通りである。ここでは、被検出物体Objとして手の指を例に挙げて説明する。図13および図14に示すように、X軸方向に沿って被検出物体Objが移動したときには、発光素子3,4,5の順番で、これらの上方を被検出物体Objが通過する。このため、反射光信号Sr1,Sr2,Sr3の順番でこれらのピークが発生するから、位相差T21,T32もこのようなピークの発生順序に応じた値になる。この結果、位相差T21,T32に基づいて、被検出物体ObjがX軸方向に沿って移動していること、および被検出物体Objの移動速度を検出することができる。
一方、図15および図16に示すように、Y軸方向に沿って被検出物体Objが移動したときには、発光素子5,3,4の順番で、これらの上方を被検出物体Objが通過する。このとき、位相差T21,T32もこのような通過順序に応じた値になるから、位相差T21,T32に基づいて、被検出物体ObjがY軸方向に沿って移動していること、および被検出物体Objの移動速度を検出することができる。
また、図17ないし図19に示すように、反射光信号Sr1〜Sr3の大きさは、被検出物体ObjのZ軸方向の位置に応じて変化する。即ち、被検出物体Objが光センサ1に近い位置に配置されたときには、反射光が強くなり、反射光信号Sr1〜Sr3も大きくなる。一方、被検出物体Objが光センサ1から離れた位置に配置されたときには、反射光が弱くなり、反射光信号Sr1〜Sr3も小さくなる。このため、反射光信号Sr1〜Sr3の大きさに応じて、Z軸方向の位置を検出できると共に、反射光信号Sr1〜Sr3の大きさの変化に応じて、被検出物体ObjがZ軸方向に沿って移動していること、および被検出物体Objの移動速度を検出することができる。
また、発光素子3〜5として、例えばVCSELのような高い分解能を有する素子を用いると、被検出物体Objの表面の凹凸に応じて、反射光信号Sr1〜Sr3の大きさが変化する。このため、図20および図21に示すように、例えば被検出物体Objとしての手がX軸方向に沿って移動したときには、指等の凹凸に応じて、反射光信号Sr1〜Sr3の大きさが変化し、反射光信号Sr1〜Sr3には複数のピークが発生する。
一方、図22に示すように、例えば被検出物体Objとして手を用いたときには、発光素子3〜5からの光が照射される部分の形状が発光素子3〜5毎に異なることがある。図22に示す例では、発光素子3,5からの光は人差し指、中指、薬指、小指の4本の指に照射されるが、発光素子4からの光は、小指を除いた3本の指にしか照射されない。この場合、図23に示すように、反射光信号Sr1,Sr3と反射光信号Sr2は互いのピークの数が異なる。このため、反射光信号Sr1〜Sr3のピーク、立上り、立下り等を用いたときには、正確な位相差T21,T32を求めることができないことがある。
これに対し、第1の実施の形態による光センサ1では、反射光信号Sr1〜Sr3の波形全体の差に基づいて位相差T21,T32を求める。例えば図23に示す反射光信号Sr1〜Sr3について、シフト量xと反射光信号Sr1,Sr2の差分の二乗和の関数Zd1(x)との関係は、図24に示す通りとなる。このとき、関数Zd1(x)の極小値は1つだけとなるから、この極小値に対応したシフト量x21が位相差T21として検出される。図25中に2点鎖線で示すように、シフト量x21だけ反射光信号Sr2をシフトさせると、反射光信号Sr1,Sr2の波形が互いに対応していることが分かる。
一方、シフト量xと反射光信号Sr2,Sr3の差分の二乗和の関数Zd2(x)との関係は、図26に示す通りとなる。このとき、関数Zd2(x)の極小値は2つ存在するが、この中で最小の極小値に対応したシフト量x32が位相差T32として検出される。図27中に2点鎖線で示すように、シフト量x32だけ反射光信号Sr3をシフトさせると、反射光信号Sr2,Sr3の波形が互いに対応していることが分かる。なお、残余の極小値に対応したシフト量xは、指1本ずれた位置に対応したものである。
このように、第1の実施の形態では、反射光信号Sr1〜Sr3の波形が相互に異なる場合でも、正確な位相差T21,T32を求めることができる。この結果、X軸方向やY軸方向に限らず、X軸方向やY軸方向から斜めに傾斜した移動方向でも正確に検出することができる。
なお、図6中のステップ1,2は反射光信号取得手段の具体例を示し、図6中のステップ3,4、図7中のステップ13〜17、図8中のステップ23〜27は位相差演算手段の具体例を示し、図6中のステップ5は移動方向特定手段の具体例を示している。
次に、図4、図28および図29を用いて、本発明の第2の実施の形態について説明する。第2の実施の形態では、3つの反射光信号の相互相関に基づいて位相差を求める。なお、第2の実施の形態において、第1の実施の形態と同一の構成要素は同一の符号を付し、その説明を省略する。
第2の実施の形態による光センサ21は、第1の実施の形態による光センサ1とほぼ同様に構成される。このため、基板2には、3個の発光素子3〜5と受光素子6が設けられると共に、信号処理回路22が実装される。信号処理回路22は、第1の実施の形態による信号処理回路11とほぼ同様に構成され、発光素子駆動部12、光検出信号増幅部13、フィルタ部14および演算処理部15を備える。
第2の実施の形態による演算処理部15は、第1の実施の形態と同様に、図6に示すプログラムを実行し、被検出物体Objの移動方向を特定する。第2の実施の形態による演算処理部15は、図6中のステップ3,4において、反射光信号Sr1〜Sr3の相互相関に基づいて位相差T21,T32を求める。
次に、第2の実施の形態による位相差T21の演算処理について、図28を参照して説明する。
ステップ41では、反射光信号Sr1,Sr2に基づいて、波形の相関を計算するための範囲として、波形の開始時刻t0と終了時刻t1を決める。ステップ42では、反射光信号Sr1,Sr2に基づいて、位相差T21の検出範囲として、反射光信号Sr2の波形を負側または正側にシフトさせる最大値(±x0)を決める。
ステップ43では、シフト量xを初期値としての負の最大値(−x0)に設定する。ステップ44では、以下の数5に示す関数Zc1(x)を用いて、反射光信号Sr2をシフト量xだけ時間をシフトさせ、この状態で反射光信号Sr2との積和を演算する。このとき、関数Zc1(x)は、反射光信号Sr1,Sr2の相関関数である。なお、関数Zc1(x)は離散値の総和を演算するものとしたが、連続値の積分を演算してもよい。
続くステップ45では、シフト量xを予め設定された所定値Δx(Δx>0)だけ増加させ、ステップ46では、シフト量xが正の最大値(+x0)よりも大きいか否かを判定する。そして、ステップ46で「NO」と判定したときには、ステップ44,45の処理を繰り返す。一方、ステップ46で「YES」と判定したときには、ステップ47に移行して、関数Zc1(x)が最大となるシフト量x21を位相差T21として出力する。
次に、第2の実施の形態による位相差T32の演算処理について、図29を参照して説明する。
ステップ51では、反射光信号Sr2,Sr3に基づいて、波形の相関を計算するための範囲として、波形の開始時刻t0と終了時刻t1を決める。ステップ52では、反射光信号Sr2,Sr3に基づいて、位相差T32の検出範囲として、反射光信号Sr2の波形を負側または正側にシフトさせる最大値(±x0)を決める。
ステップ53では、シフト量xを初期値としての負の最大値(−x0)に設定する。ステップ54では、以下の数6に示す関数Zc2(x)を用いて、反射光信号Sr3をシフト量xだけ時間をシフトさせ、この状態で反射光信号Sr2との積和を演算する。このとき、関数Zc2(x)は、反射光信号Sr2,Sr3の相関関数である。なお、関数Zc2(x)は離散値の総和を演算するものとしたが、連続値の積分を演算してもよい。
続くステップ55では、シフト量xを予め設定された所定値Δx(Δx>0)だけ増加させ、ステップ56では、シフト量xが正の最大値(+x0)よりも大きいか否かを判定する。そして、ステップ56で「NO」と判定したときには、ステップ54,55の処理を繰り返す。一方、ステップ56で「YES」と判定したときには、ステップ57に移行して、関数Zc2(x)が最大となるシフト量x32を位相差T32として出力する。
かくして、第2の実施の形態でも、第1の実施の形態とほぼ同様な作用効果を得ることができる。なお、第2の実施の形態では、図28中のステップ43〜47、図29中のステップ53〜57が位相差演算手段の具体例を示している。
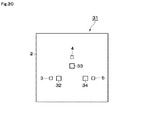
次に、図30を用いて、本発明の第3の実施の形態について説明する。第3の実施の形態では、3個の発光素子に対応して3個の受光素子を備える。なお、第3の実施の形態において、第1の実施の形態と同一の構成要素は同一の符号を付し、その説明を省略する。
第3の実施の形態による光センサ31では、基板2には3個の受光素子32〜34が実装される。受光素子32は、発光素子3の近傍に位置して発光素子3からの光に基づく反射光を受光する。受光素子33は、発光素子4の近傍に位置して発光素子4からの光に基づく反射光を受光する。受光素子34は、発光素子5の近傍に位置して発光素子5からの光に基づく反射光を受光する。
この場合、発光素子3〜5はパルス発光で時分割発光する必要はなく、連続発光してもよい。
かくして、第3の実施の形態でも、第1の実施の形態とほぼ同様な作用効果を得ることができる。この場合、3個の受光素子32〜34から出力される光検出信号が反射光信号Sr1〜Sr3にそれぞれ対応するから、3個の受光素子32〜34は、反射光信号取得手段の一部を構成する。
なお、第3の実施の形態は、第2の実施の形態にも適用することができる。また、第3の実施の形態では、3個の受光素子32〜34を備える場合を例に挙げて説明したが、2個の受光素子を備える構成としてもよく、4個以上の受光素子を備える構成としてもよい。
前記各実施の形態では、3個の発光素子3〜5を備える場合を例に挙げて説明したが、4個以上の発光素子を備える構成としてもよい。
前記各実施の形態では、信号処理回路11,22は基板2に実装する構成としたが、基板2と別個に設けてもよい。
前記各実施の形態では、反射光信号Sr1,Sr2間の位相差T21と反射光信号Sr2,Sr3間の位相差T32を用いて被検出物体Objの移動方向等を特定する場合を例に挙げて説明した。しかし、本発明はこれに限らず、例えば位相差T21,T32のいずれかに代えて、反射光信号Sr1,Sr3間の位相差T31を用いてもよく、これら3つの位相差T21,T32,T31を用いてもよい。
1,21,31 光センサ
2 基板
2A 表面
3〜5 発光素子
6,32〜34 受光素子
11,22 信号処理回路
12 発光素子駆動部(発光制御手段)
15 演算処理部
2 基板
2A 表面
3〜5 発光素子
6,32〜34 受光素子
11,22 信号処理回路
12 発光素子駆動部(発光制御手段)
15 演算処理部
Claims (5)
- 基板と、
該基板の表面に実装された少なくとも3個の発光素子と、
該少なくとも3個の発光素子の発光動作を制御する発光制御手段と、
前記基板の表面に実装された少なくとも1個の受光素子とを備え、
前記発光素子から出射された光が、被検出物体によって反射された光を前記受光素子で受光することによって該被検出物体の存在および移動を検知する光センサにおいて、
前記少なくとも3個の発光素子による光が前記被検出物体によって反射された光を前記受光素子によって受光し、前記受光素子から出力される光検出信号に基づいて、前記3個の発光素子による光に対応した3つの反射光信号を取得する反射光信号取得手段と、
3つの前記反射光信号の波形全体の差または相関に基づいて各々の位相差を求める位相差演算手段と、
少なくとも2つの前記位相差に基づいて前記被検出物体の移動方向を特定する移動方向特定手段とを備えることを特徴とする光センサ。 - 前記位相差演算手段は、2つの前記反射光信号の位相差を求めるときには、一方の前記反射光信号を所定のシフト量だけ時間をシフトさせた状態で、他方の前記反射光信号との間の差の二乗を波形全体で加算し、この加算値が最小となるシフト量を位相差とする請求項1に記載の光センサ。
- 前記位相差演算手段は、2つの前記反射光信号の位相差を求めるときには、一方の前記反射光信号を所定のシフト量だけ時間をシフトさせた状態で、2つの前記反射光信号の積和演算を行い、この演算値が最大となるシフト量を位相差とする請求項1に記載の光センサ。
- 前記発光制御手段は、前記少なくとも3個の発光素子の各々をパルス発光で、かつ時分割発光させる請求項1に記載の光センサ。
- 前記発光素子は面発光レーザである請求項1に記載の光センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014506127A JP5765483B2 (ja) | 2012-03-19 | 2013-03-06 | 光センサ |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012061867 | 2012-03-19 | ||
| JP2012061867 | 2012-03-19 | ||
| JP2014506127A JP5765483B2 (ja) | 2012-03-19 | 2013-03-06 | 光センサ |
| PCT/JP2013/056107 WO2013141021A1 (ja) | 2012-03-19 | 2013-03-06 | 光センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2013141021A1 JPWO2013141021A1 (ja) | 2015-08-03 |
| JP5765483B2 true JP5765483B2 (ja) | 2015-08-19 |
Family
ID=49222483
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014506127A Expired - Fee Related JP5765483B2 (ja) | 2012-03-19 | 2013-03-06 | 光センサ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9476901B2 (ja) |
| EP (1) | EP2829951B1 (ja) |
| JP (1) | JP5765483B2 (ja) |
| CN (1) | CN104205020B (ja) |
| WO (1) | WO2013141021A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6607709B2 (ja) * | 2015-06-08 | 2019-11-20 | ローム株式会社 | 近接センサ |
| JP6753653B2 (ja) * | 2015-06-23 | 2020-09-09 | ローム株式会社 | 近接センサ及びそれを用いた電子機器 |
| FR3053135B1 (fr) * | 2016-06-27 | 2018-08-10 | Valeo Comfort And Driving Assistance | Dispositif de detection de gestes |
| FR3053136A1 (fr) * | 2016-06-27 | 2017-12-29 | Valeo Comfort & Driving Assistance | Dispositif de detection de gestes |
| CN110178044B (zh) * | 2017-01-23 | 2022-04-05 | 深圳源光科技有限公司 | 检测装置、检测系统及检测装置的制作方法 |
| TWI662482B (zh) * | 2017-06-28 | 2019-06-11 | 緯創資通股份有限公司 | 手勢識別方法以及手勢識別模組 |
| US11157111B2 (en) * | 2017-08-29 | 2021-10-26 | Sony Interactive Entertainment LLC | Ultrafine LED display that includes sensor elements |
| AT522115A1 (de) * | 2019-01-24 | 2020-08-15 | Zactrack Gmbh | Bühnentechnische Vorrichtung und Verfahren zur Bestimmung einer Korrelationsfunktion |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3240941B2 (ja) * | 1996-11-18 | 2001-12-25 | 松下電器産業株式会社 | 手振り検出方法及び装置 |
| JP2891955B2 (ja) * | 1997-02-14 | 1999-05-17 | 日本電気移動通信株式会社 | Lcd表示装置 |
| ATE463004T1 (de) * | 2000-11-06 | 2010-04-15 | Koninkl Philips Electronics Nv | Verfahren zur messung der bewegung eines eingabegeräts |
| EP1716476B1 (en) * | 2004-02-09 | 2015-05-20 | Koninklijke Philips N.V. | Optical input device based on doppler shift and laser self-mixing |
| JP2007003355A (ja) * | 2005-06-23 | 2007-01-11 | Shinku Rei:Kk | パルス光伝播時間計測装置および仮想マウス等の応用装置 |
| US20070080940A1 (en) * | 2005-10-07 | 2007-04-12 | Sharp Kabushiki Kaisha | Remote control system, and display device and electronic device using the remote control system |
| JP2007104567A (ja) * | 2005-10-07 | 2007-04-19 | Sharp Corp | 電子機器 |
| US8253768B2 (en) * | 2005-12-09 | 2012-08-28 | Ricoh Company, Ltd. | Optical scanner and image forming apparatus |
| JP4912071B2 (ja) * | 2006-08-04 | 2012-04-04 | 株式会社リコー | 光走査装置、光走査方法、画像形成装置、カラー画像形成装置、プログラム、記録媒体 |
| EP2068212A1 (fr) * | 2007-12-06 | 2009-06-10 | The Swatch Group Research and Development Ltd. | Objet portable tel qu'une pièce d'horlogerie comprenant des moyens d'enclenchement d'une fonction de commande électronique |
| KR101734354B1 (ko) * | 2009-04-29 | 2017-05-11 | 코닌클리케 필립스 엔.브이. | 차량 동역학의 특징화를 위한 레이저 다이오드 기반 다중 빔 레이저 스폿 이미징 시스템 |
| US8619029B2 (en) * | 2009-05-22 | 2013-12-31 | Motorola Mobility Llc | Electronic device with sensing assembly and method for interpreting consecutive gestures |
| US8810524B1 (en) * | 2009-11-20 | 2014-08-19 | Amazon Technologies, Inc. | Two-sided touch sensor |
| JP2011227574A (ja) | 2010-04-15 | 2011-11-10 | Rohm Co Ltd | 演算装置、動き検出装置、電子機器 |
| JP5758688B2 (ja) * | 2010-07-22 | 2015-08-05 | ローム株式会社 | 照明機器 |
| KR101146454B1 (ko) | 2010-07-29 | 2012-05-18 | 엘지엔시스(주) | 매체의 자기성분 검출방법 및 그를 이용한 매체인식방법과 매체인식장치 |
| JP2012173029A (ja) * | 2011-02-18 | 2012-09-10 | Seiko Epson Corp | 光学式位置検出装置および入力機能付き表示システム |
-
2013
- 2013-03-06 WO PCT/JP2013/056107 patent/WO2013141021A1/ja active Application Filing
- 2013-03-06 CN CN201380015398.XA patent/CN104205020B/zh not_active Expired - Fee Related
- 2013-03-06 JP JP2014506127A patent/JP5765483B2/ja not_active Expired - Fee Related
- 2013-03-06 EP EP13764924.0A patent/EP2829951B1/en not_active Not-in-force
-
2014
- 2014-09-18 US US14/489,543 patent/US9476901B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2829951A4 (en) | 2015-05-06 |
| JPWO2013141021A1 (ja) | 2015-08-03 |
| EP2829951A1 (en) | 2015-01-28 |
| WO2013141021A1 (ja) | 2013-09-26 |
| CN104205020A (zh) | 2014-12-10 |
| CN104205020B (zh) | 2016-12-28 |
| US20150006106A1 (en) | 2015-01-01 |
| EP2829951B1 (en) | 2017-11-01 |
| US9476901B2 (en) | 2016-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5765483B2 (ja) | 光センサ | |
| US10261175B2 (en) | Ranging apparatus | |
| JP6805504B2 (ja) | 距離測定装置、移動体装置及び距離測定方法 | |
| US7965278B2 (en) | Optical navigation device adapted for navigation on a transparent plate | |
| CN106324586B (zh) | 光子设备 | |
| US20140285817A1 (en) | Limited reflection type photoelectric sensor | |
| JP2008052734A (ja) | 透明構造上のナビゲーションに適合した持ち上がり検出 | |
| JP2003287420A (ja) | 測距センサおよびこれを備えた電子機器、測距センサの製造方法 | |
| GB2443975A (en) | Optical navigation and lift detection system | |
| JP5773067B2 (ja) | 光センサ | |
| CN101206541B (zh) | 用于对表面进行导航的方法和装置 | |
| JP2022087326A (ja) | エンコーダ | |
| US10085013B2 (en) | 3D camera module | |
| US20120133617A1 (en) | Application using a single photon avalanche diode (spad) | |
| WO2006106452A1 (en) | Relative movement sensor comprising multiple lasers | |
| TWI505141B (zh) | 光學導航裝置及其製造方法,以及追蹤光學導航裝置與導航表面之間之相對移動的方法 | |
| JP2018179640A (ja) | 乗員検出装置 | |
| TWI564754B (zh) | 空間運動感測器與空間運動感測方法 | |
| TWI575248B (zh) | 非接觸式光學感測裝置及感測三維空間之物件深度位置的方法 | |
| JP6020738B2 (ja) | 傾き検出装置 | |
| JP6760319B2 (ja) | 光検出装置、光検出方法および光学式測距センサ | |
| KR20160051070A (ko) | 양안 시차를 이용한 물체 위치 검출 장치 및 그 장치의 동작 방법 | |
| JPH0381609A (ja) | 3次元位置認識装置 | |
| JP2012226412A (ja) | 光学式位置検出装置および入力機能付き表示システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150519 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150601 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5765483 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |