JP5635100B2 - 生体組織の少なくとも1つの特性を測定する方法、およびその方法を実施する超音波変換器 - Google Patents
生体組織の少なくとも1つの特性を測定する方法、およびその方法を実施する超音波変換器 Download PDFInfo
- Publication number
- JP5635100B2 JP5635100B2 JP2012529279A JP2012529279A JP5635100B2 JP 5635100 B2 JP5635100 B2 JP 5635100B2 JP 2012529279 A JP2012529279 A JP 2012529279A JP 2012529279 A JP2012529279 A JP 2012529279A JP 5635100 B2 JP5635100 B2 JP 5635100B2
- Authority
- JP
- Japan
- Prior art keywords
- biological tissue
- parameter
- characteristic
- tissue
- parameters
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 56
- 238000002604 ultrasonography Methods 0.000 claims description 47
- 238000002091 elastography Methods 0.000 claims description 15
- 230000005855 radiation Effects 0.000 claims description 4
- 210000001519 tissue Anatomy 0.000 description 122
- 239000000523 sample Substances 0.000 description 24
- 210000004185 liver Anatomy 0.000 description 23
- 238000005259 measurement Methods 0.000 description 10
- 238000001514 detection method Methods 0.000 description 7
- 230000017531 blood circulation Effects 0.000 description 6
- 241001465754 Metazoa Species 0.000 description 5
- 210000002615 epidermis Anatomy 0.000 description 5
- 230000000007 visual effect Effects 0.000 description 5
- 210000003734 kidney Anatomy 0.000 description 4
- 210000004072 lung Anatomy 0.000 description 3
- 210000000056 organ Anatomy 0.000 description 3
- 210000000577 adipose tissue Anatomy 0.000 description 2
- 239000006185 dispersion Substances 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000009552 doppler ultrasonography Methods 0.000 description 2
- 210000000936 intestine Anatomy 0.000 description 2
- 238000007477 logistic regression Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 206010033675 panniculitis Diseases 0.000 description 2
- 208000003098 Ganglion Cysts Diseases 0.000 description 1
- 241000282412 Homo Species 0.000 description 1
- 206010020843 Hyperthermia Diseases 0.000 description 1
- 208000005400 Synovial Cyst Diseases 0.000 description 1
- 210000001557 animal structure Anatomy 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000037396 body weight Effects 0.000 description 1
- 210000000481 breast Anatomy 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 210000004907 gland Anatomy 0.000 description 1
- 230000036031 hyperthermia Effects 0.000 description 1
- 238000000338 in vitro Methods 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 230000003601 intercostal effect Effects 0.000 description 1
- 230000000968 intestinal effect Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 238000003908 quality control method Methods 0.000 description 1
- 210000003491 skin Anatomy 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 210000004304 subcutaneous tissue Anatomy 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 210000001685 thyroid gland Anatomy 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0048—Detecting, measuring or recording by applying mechanical forces or stimuli
- A61B5/0051—Detecting, measuring or recording by applying mechanical forces or stimuli by applying vibrations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/41—Detecting, measuring or recording for evaluating the immune or lymphatic systems
- A61B5/414—Evaluating particular organs or parts of the immune or lymphatic systems
- A61B5/415—Evaluating particular organs or parts of the immune or lymphatic systems the glands, e.g. tonsils, adenoids or thymus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/41—Detecting, measuring or recording for evaluating the immune or lymphatic systems
- A61B5/414—Evaluating particular organs or parts of the immune or lymphatic systems
- A61B5/418—Evaluating particular organs or parts of the immune or lymphatic systems lymph vessels, ducts or nodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/485—Diagnostic techniques involving measuring strain or elastic properties
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Immunology (AREA)
- Vascular Medicine (AREA)
- Endocrinology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Description
− 被測定生体組織に対向させて超音波変換器を位置決めするステップ;
− 前記生体組織内に少なくとも1つの超音波信号を発生させるステップ;
− 前記生体組織から反射された少なくとも1つの超音波信号を捕捉するステップ;
− 生体組織から反射されて前記捕捉された少なくとも1つの超音波信号によって前記生体組織の少なくとも1つのパラメータを決定するステップであって、前記少なくとも1つのパラメータが前記生体組織を表している、ステップ
を含む方法において、
− 前記超音波変換器に対向して前記標的生体組織が存在するという仮定を確認するために、前記生体組織の前記少なくとも1つのパラメータを標的生体組織の少なくとも1つの参照パラメータと比較するステップ;
− 前記比較ステップの結果に基づいて前記生体組織の少なくとも1つの特性を決定するステップ
をさらに含むことを特徴とする方法に関する。
− 前記比較ステップは、少なくとも1つのパラメータの値を少なくとも1つの参照パラメータの値と比較することからなり、少なくとも1つの特性を決定するステップは、このパラメータの少なくとも1つの値と少なくとも1つの参照パラメータの値との間の差の絶対値が所与の閾値を下回る場合にのみ、実施される;
− 複数のパラメータが組み合わせられ、比較ステップが、パラメータの組み合わせから得られる結果を少なくとも1つの参照パラメータと比較することからなる;
− 方法が、生体組織に低周波弾性波を発生させるステップを含む;
− この低周波弾性波は、低周波弾性波発生器の振動によって発生される;
− この低周波弾性波は放射圧によって発生される;
− この比較ステップの結果をインジケータによって操作者に知らせる;そのようなインジケータは、プローブまたはスクリーン上に配置されかつプローブと通信可能な可視的インジケータとし得るか、または可聴式インジケータとし得る。
− 生体組織の前記パラメータおよび前記特性は、生体組織から反射されて捕捉された少なくとも1つの超音波信号から抽出されたデータに基づいて決定される;この特徴のために、前記生体組織を表すパラメータおよび前記生体組織の特性の双方を決定するために単一回の測定が行われる;
− 前記生体組織の少なくとも1つの特性がエラストグラフィ方法を実施することによって決定される;
− 少なくとも1つの特性は前記生体組織の弾力性である;
− 少なくとも1つの特性は前記生体組織の超音波減衰である;
− 少なくとも1つのパラメータは前記生体組織の超音波パラメータである;
− 少なくとも1つの超音波パラメータは前記生体組織の超音波減衰である;
− 少なくとも1つのパラメータは前記生体組織の粘弾性パラメータである;
− 少なくとも1つの粘弾性パラメータは前記生体組織の弾力性である;
− 弾力性は、振動エラストグラフィ方法によって得られる;
− 少なくとも1つのパラメータは前記生体組織の生理的パラメータである。
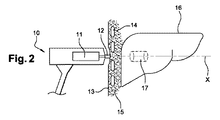
− 低周波弾性波発生器11および超音波変換器12を備えた振動エラストグラフィプローブ10;
− 表皮13;
− 4本の肋骨14;
− 皮下組織15;
− なんら限定されないが、例えば、肝臓16が形成する生体組織;
− 対象領域17;
− 超音波放射軸X
を示す。
− 決定されているパラメータが参照パラメータに適合する場合は緑色;
− 決定されているパラメータが参照パラメータと異なる場合は赤色
を点灯する信号灯によって形成してもよい。
予測値(組み合わせから得られる結果)=a+b*Parameter_1[...]+c*Parameter_2[...]...
を適用することによって得てもよい。
− 各無線周波数の超音波信号に対して対象領域17を選択するステップ(肝臓16の例では、対象領域17は、例えば、表皮13の下側25〜65mmの間に位置し得る);
− 対象領域17からの各無線周波数の超音波信号に対して時間窓の枠組みを作成するステップであって、同一の期間Tに対し窓数は1〜nまで可変であり、各窓は、予め定めた百分率だけ、隣接する窓と重なりあっている、ステップ;
− 各窓に関して、無線周波数の超音波信号がゼロ点を通過した回数を評価するステップ;(それゆえ、無線周波数の超音波信号が減衰されるほど、一時的な持続期間Tの窓中にゼロ点を通過する回数は少なくなる);
− 数式によって超音波減衰値を決定するステップ。
Claims (17)
- 生体組織(16)の少なくとも1つの特性を測定する方法であって、
− 測定する前記生体組織(16)に対向させて超音波変換器(12)を位置決めするステップ(1);
− 前記生体組織(16)内に少なくとも1つの超音波信号を発生させるステップ(21);
− 前記生体組織(16)から反射された少なくとも1つの超音波信号を捕捉するステップ(22);
− 前記生体組織(16)から反射された前記少なくとも1つの超音波信号の前記捕捉(22)によって前記生体組織(16)の少なくとも1つのパラメータを決定するステップ(3)であって、前記少なくとも1つのパラメータが、前記生体組織(16)を表すステップ(3);
− 前記超音波変換器に対向して標的生体組織が存在するという仮定を確認するために、前記生体組織(16)の前記少なくとも1つのパラメータと前記標的生体組織の少なくとも1つの参照パラメータとを比較する、比較ステップ(4);
− 前記比較ステップ(4)の結果に基づいて前記生体組織(16)の少なくとも1つの特性を決定するステップ(5);
を含み、
前記比較ステップ(4)が、前記少なくとも1つの決定されたパラメータの値と、前記少なくとも1つの参照パラメータの値とを比較することからなり、前記少なくとも1つの特性を決定するステップ(5)は、前記少なくとも1つの決定されたパラメータの前記値と前記少なくとも1つの参照パラメータの前記値との間の差の絶対値が所与の閾値を下回る場合にのみ実施されることを特徴とする方法。 - 複数のパラメータを組み合わせ、前記比較ステップ(4)は、パラメータの前記組み合わせから得られた結果と前記少なくとも1つの参照パラメータとを比較することからなることを特徴とする、請求項1に記載の方法。
- 前記生体組織(16)に低周波弾性波を発生させるステップ(23)を含むことを特徴とする、請求項1または2に記載の方法。
- 前記低周波弾性波が、低周波弾性波発生器(11)の振動によって発生されることを特徴とする、請求項3に記載の方法。
- 前記低周波弾性波が放射圧によって発生されることを特徴とする、請求項3に記載の方法。
- 前記比較ステップ(4)の結果をインジケータによって操作者に知らせることを特徴とする、請求項1〜5のいずれか一項に記載の方法。
- 前記生体組織(16)の前記少なくとも1つのパラメータおよび前記少なくとも1つの特性が、前記生体組織(16)から反射されて前記捕捉(22)された前記少なくとも1つの超音波信号から抽出されたデータに基づいて決定されることを特徴とする、請求項1〜6のいずれか一項に記載の方法。
- 前記生体組織(16)の前記少なくとも1つの特性が、エラストグラフィ方法を実施することによって決定されることを特徴とする、請求項1〜7のいずれか一項に記載の方法。
- 前記少なくとも1つの特性が前記生体組織(16)の弾力性であることを特徴とする、請求項1〜8のいずれか一項に記載の方法。
- 前記少なくとも1つの特性が前記生体組織(16)の超音波減衰であることを特徴とする、請求項1〜7のいずれか一項に記載の方法。
- 前記少なくとも1つのパラメータが前記生体組織(16)の超音波パラメータであることを特徴とする、請求項1〜10のいずれか一項に記載の方法。
- 前記少なくとも1つの超音波パラメータが前記生体組織(16)の超音波減衰であることを特徴とする、請求項11に記載の方法。
- 前記少なくとも1つのパラメータが前記生体組織(16)の粘弾性パラメータであることを特徴とする、請求項1〜10のいずれか一項に記載の方法。
- 前記粘弾性パラメータが前記生体組織(16)の弾力性であることを特徴とする、請求項13に記載の方法。
- 前記弾力性がエラストグラフィ方法によって得られることを特徴とする、請求項14に記載の方法。
- 前記少なくとも1つのパラメータが前記生体組織(16)の生理的パラメータであることを特徴とする、請求項1〜10のいずれか一項に記載の方法。
- 請求項1〜16のいずれか一項に記載の、生体組織(16)の少なくとも1つの特性を測定する前記方法を実施する、超音波変換器(12)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0956408 | 2009-09-17 | ||
| FR0956408A FR2949965B1 (fr) | 2009-09-17 | 2009-09-17 | Procede pour la mesure d'au moins une propriete de tissu biologique |
| PCT/EP2010/063677 WO2011033050A1 (fr) | 2009-09-17 | 2010-09-17 | Procede pour la mesure d'au moins une propriete d'un tissu biologique |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013505040A JP2013505040A (ja) | 2013-02-14 |
| JP5635100B2 true JP5635100B2 (ja) | 2014-12-03 |
Family
ID=42111548
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012529279A Active JP5635100B2 (ja) | 2009-09-17 | 2010-09-17 | 生体組織の少なくとも1つの特性を測定する方法、およびその方法を実施する超音波変換器 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US9918695B2 (ja) |
| EP (1) | EP2477551B1 (ja) |
| JP (1) | JP5635100B2 (ja) |
| CN (1) | CN102596051B (ja) |
| BR (1) | BR112012006041A2 (ja) |
| ES (1) | ES2618570T3 (ja) |
| FR (1) | FR2949965B1 (ja) |
| IN (1) | IN2012DN02603A (ja) |
| PL (1) | PL2477551T3 (ja) |
| PT (1) | PT2477551T (ja) |
| WO (1) | WO2011033050A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11071525B2 (en) | 2017-07-27 | 2021-07-27 | General Electric Company | Ultrasonic diagnostic apparatus and method |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5896623B2 (ja) | 2011-05-02 | 2016-03-30 | キヤノン株式会社 | 被検体情報取得装置およびその制御方法 |
| WO2012158877A2 (en) * | 2011-05-17 | 2012-11-22 | University Of Rochester | Non-invasive assessment of liver fat by crawling wave dispersion |
| FR2978657B1 (fr) * | 2011-08-03 | 2013-08-30 | Echosens | Procede pour determiner en temps-reel une probabilite de presence d'un tissu biologique cible en regard d'un transducteur ultrasonore |
| US20140316267A1 (en) * | 2011-08-15 | 2014-10-23 | University Of Rochester | Non-invasive assessment of liver fat by crawling wave dispersion with emphasis on attenuation |
| FR3036943A1 (fr) | 2015-06-02 | 2016-12-09 | Echosens | Dispositif non invasif de detection de lesion hepatique |
| WO2017176065A1 (ko) * | 2016-04-07 | 2017-10-12 | (주)엠큐브테크놀로지 | 독립형 초음파 스캐너 |
| FR3054123B1 (fr) * | 2016-07-25 | 2021-11-26 | Echosens | Procede de mesure d’un parametre viscoelastique d’un organe humain ou animal |
| KR102627723B1 (ko) * | 2017-09-08 | 2024-01-23 | 삼성메디슨 주식회사 | 초음파 영상장치 및 그 제어방법 |
| EP3453336B1 (en) * | 2017-09-08 | 2020-11-04 | Samsung Medison Co., Ltd. | Ultrasound imaging apparatus and control method thereof |
| US11426146B2 (en) | 2017-09-08 | 2022-08-30 | Samsung Medison Co., Ltd. | Ultrasound imaging apparatus and control method thereof |
| US11443422B2 (en) | 2017-10-13 | 2022-09-13 | The Cleveland Clinic Foundation | Advanced ultrasonic detection of different tissue types |
| FR3078485B1 (fr) * | 2018-03-02 | 2020-02-28 | Echosens | Procede d’elastographie hybride, sonde et dispositif pour elastographie hybride |
| FR3078484A1 (fr) | 2018-03-02 | 2019-09-06 | Echosens | Procede de mesure d’un parametre d’attenuation ultrasonore guide par elastographie harmonique, sonde et dispositif pour la mise en œuvre du procede |
| CN109363718A (zh) * | 2018-10-26 | 2019-02-22 | 深圳迈瑞生物医疗电子股份有限公司 | 超声成像方法和超声成像设备 |
| CN113081054B (zh) * | 2018-12-04 | 2022-10-11 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声成像方法以及超声成像系统 |
| US11850098B2 (en) | 2019-06-14 | 2023-12-26 | Echosens | Method and device for measuring an ultrasound parameter of a viscoelastic medium |
| EP3750483A1 (en) | 2019-06-14 | 2020-12-16 | Echosens | Method and device for measuring an ultrasound parameter of a viscoelastic medium |
| CN114224382B (zh) * | 2021-12-17 | 2023-09-15 | 重庆医科大学 | 粘弹性测量方法及其系统 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4389893A (en) * | 1981-06-01 | 1983-06-28 | North American Philips Corporation | Precision ultrasound attenuation measurement |
| US4441368A (en) | 1982-04-19 | 1984-04-10 | General Electric Company | Method and means for determining ultrasonic wave attenuation in tissue |
| US4603703A (en) * | 1984-04-13 | 1986-08-05 | The Board Of Trustees Of The Leland Stanford Junior University | Method for real-time detection and identification of neuroelectric signals |
| JP2590219B2 (ja) * | 1988-08-05 | 1997-03-12 | 株式会社東芝 | 超音波診断装置 |
| US5906578A (en) * | 1997-06-18 | 1999-05-25 | Rajan; Govinda N. | Method and system for probe positioning in transesophageal echocardiography |
| US6013031A (en) * | 1998-03-09 | 2000-01-11 | Mendlein; John D. | Methods and devices for improving ultrasonic measurements using anatomic landmarks and soft tissue correction |
| US6238342B1 (en) * | 1998-05-26 | 2001-05-29 | Riverside Research Institute | Ultrasonic tissue-type classification and imaging methods and apparatus |
| US20020068870A1 (en) * | 2000-07-20 | 2002-06-06 | Alam Sheikh Kaisar | Hand held mechanical compression device for inducing tissue strain |
| FR2843290B1 (fr) * | 2002-08-08 | 2005-06-24 | Echosens | Dispositif et procede pour la mesure de l'elasticite d'un organe humain ou animal |
| US7578789B2 (en) * | 2002-08-08 | 2009-08-25 | Echosens | Device and method for measuring the elasticity of a human or animal organ |
| US7914456B2 (en) * | 2003-05-30 | 2011-03-29 | Hitachi Medical Corporation | Ultrasonic probe and ultrasonic elasticity imaging device |
| US20100168574A1 (en) * | 2005-12-14 | 2010-07-01 | Teijin Pharma Limited | Medical Ultrasound Device Having Irradiation Position Checking Function |
| JP4981023B2 (ja) * | 2006-03-02 | 2012-07-18 | 株式会社日立メディコ | 自動圧迫装置及び同装置を用いた超音波診断装置 |
| US8711144B2 (en) * | 2006-08-01 | 2014-04-29 | Siemens Medical Solutions Usa, Inc. | Perception-based artifact quantification for volume rendering |
| US9125589B2 (en) * | 2007-05-09 | 2015-09-08 | General Electric Company | System and method for tissue characterization using ultrasound imaging |
| JP2010526626A (ja) * | 2007-05-16 | 2010-08-05 | スーパー ソニック イマジン | 関心領域の粘弾性の平均値を測定するための方法および装置 |
| US8131379B2 (en) * | 2007-08-27 | 2012-03-06 | St. Jude Medical Atrial Fibrillation Division, Inc. | Cardiac tissue elasticity sensing |
| JP2009183454A (ja) * | 2008-02-06 | 2009-08-20 | Teijin Pharma Ltd | 周波数減衰特性を利用した超音波検査装置又は超音波照射位置検査方法 |
| JP5426101B2 (ja) * | 2008-02-25 | 2014-02-26 | 株式会社東芝 | 超音波診断装置及、超音波画像処理装置及び超音波画像処理プログラム |
-
2009
- 2009-09-17 FR FR0956408A patent/FR2949965B1/fr active Active
-
2010
- 2010-09-17 EP EP10752844.0A patent/EP2477551B1/fr active Active
- 2010-09-17 JP JP2012529279A patent/JP5635100B2/ja active Active
- 2010-09-17 IN IN2603DEN2012 patent/IN2012DN02603A/en unknown
- 2010-09-17 US US13/496,628 patent/US9918695B2/en active Active
- 2010-09-17 PT PT107528440T patent/PT2477551T/pt unknown
- 2010-09-17 CN CN201080048631.0A patent/CN102596051B/zh active Active
- 2010-09-17 ES ES10752844.0T patent/ES2618570T3/es active Active
- 2010-09-17 WO PCT/EP2010/063677 patent/WO2011033050A1/fr active Application Filing
- 2010-09-17 BR BR112012006041-4A patent/BR112012006041A2/pt not_active Application Discontinuation
- 2010-09-17 PL PL10752844T patent/PL2477551T3/pl unknown
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11071525B2 (en) | 2017-07-27 | 2021-07-27 | General Electric Company | Ultrasonic diagnostic apparatus and method |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120190983A1 (en) | 2012-07-26 |
| CN102596051B (zh) | 2017-08-18 |
| WO2011033050A1 (fr) | 2011-03-24 |
| EP2477551A1 (fr) | 2012-07-25 |
| CN102596051A (zh) | 2012-07-18 |
| FR2949965A1 (fr) | 2011-03-18 |
| US9918695B2 (en) | 2018-03-20 |
| JP2013505040A (ja) | 2013-02-14 |
| FR2949965B1 (fr) | 2012-09-28 |
| IN2012DN02603A (ja) | 2015-09-04 |
| EP2477551B1 (fr) | 2016-12-14 |
| PL2477551T3 (pl) | 2017-06-30 |
| PT2477551T (pt) | 2017-03-17 |
| ES2618570T3 (es) | 2017-06-21 |
| BR112012006041A2 (pt) | 2020-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5635100B2 (ja) | 生体組織の少なくとも1つの特性を測定する方法、およびその方法を実施する超音波変換器 | |
| KR102287021B1 (ko) | 전단파 탄성초음파 영상화를 수행하기 위한 영상화 방법 및 장치 | |
| JP4667394B2 (ja) | 超音波診断装置 | |
| JP6761866B2 (ja) | 弾性の検出方法及び機器 | |
| JP6139067B2 (ja) | 超音波診断装置 | |
| JP6203197B2 (ja) | 肺振動中の経胸郭肺ドップラー超音波を使用した肺疾患の診断 | |
| JP2010526626A (ja) | 関心領域の粘弾性の平均値を測定するための方法および装置 | |
| JP2020501648A5 (ja) | ||
| US11850098B2 (en) | Method and device for measuring an ultrasound parameter of a viscoelastic medium | |
| JP2005532097A5 (ja) | ||
| JP7284769B2 (ja) | 解剖学的粘度の剪断波検出 、関連するデバイス、システム、及び方法 | |
| US20140187940A1 (en) | Method of calculating displacement of shear wave, method of calculating mechanical modulus of body, and system using the methods | |
| CN111110275A (zh) | 血管力学性能的测量方法、装置、系统及存储介质 | |
| Ostras et al. | Diagnostic ultrasound imaging of the lung: A simulation approach based on propagation and reverberation in the human body | |
| JP2001519674A (ja) | エラストグラフィー測定および撮像法およびこの方法を実施する装置 | |
| US11490876B2 (en) | Ultrasonic diagnostic device and method for evaluating physical properties of biological tissue | |
| JP5747377B2 (ja) | 超音波診断装置及び超音波診断用プログラム | |
| CN110494082B (zh) | 超声弹性成像方法和系统 | |
| JP2010094287A (ja) | 超音波診断装置、超音波信号処理装置及び超音波信号処理プログラム | |
| CN117897102A (zh) | 用于使用超声的反向散射相干的组织分析的方法、系统和计算机程序产品 | |
| KR20200143285A (ko) | 점탄성 매체의 초음파 파라미터를 측정하는 방법 및 디바이스 | |
| JP2018061635A (ja) | 超音波撮像装置及び硬さの算出方法 | |
| EP2508136B1 (en) | Apparatus and method for ultrasound imaging with contrast agents | |
| WO2017169332A1 (ja) | 超音波撮像装置および超音波受信信号の処理方法 | |
| JP6207956B2 (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140318 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140319 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141015 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5635100 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |