JP5572994B2 - Robot controller - Google Patents
Robot controller Download PDFInfo
- Publication number
- JP5572994B2 JP5572994B2 JP2009117547A JP2009117547A JP5572994B2 JP 5572994 B2 JP5572994 B2 JP 5572994B2 JP 2009117547 A JP2009117547 A JP 2009117547A JP 2009117547 A JP2009117547 A JP 2009117547A JP 5572994 B2 JP5572994 B2 JP 5572994B2
- Authority
- JP
- Japan
- Prior art keywords
- amount
- characteristic
- center point
- origin
- tool center
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Manipulator (AREA)
Description
本発明は、操作レバー等の操作子の操作に応じて、ツールセンターポイントを移動させるための駆動信号を、ロボットのアクチュエータに対して出力するロボット制御装置に関するものである。 The present invention relates to a robot control apparatus that outputs a drive signal for moving a tool center point to an actuator of a robot in accordance with an operation of an operation element such as an operation lever.
例えば、車両の製造ライン等においては、作業員が一人では運べないほど大きく重たいワークを取り扱うことが多い。そのような作業の省力化を図るために、従来からパワーアシスト装置が利用されている。このパワーアシスト装置では、ワークの重力方向の荷重の大半を装置に負担させて、作業員が負担するワークの荷重を軽くすることができる。 For example, in a vehicle production line or the like, a large and heavy work is often handled so that a worker cannot carry it alone. Conventionally, a power assist device has been used in order to save such work. In this power assist device, most of the load in the gravity direction of the work can be borne by the device, and the work load borne by the worker can be reduced.
上述したパワーアシスト装置では、作業員が操作子を操作してマニピュレータを動作させることで、マニピュレータの手先に保持されたワークを所望の姿勢や位置に動かすことになる。そのために、パワーアシスト装置においては、操作子に加わる作業員の操作力を力覚センサで検出し、検出した操作力から操作子の操作方向を判別する。そして、判別した操作子の操作方向にワークを動かす駆動信号を生成し、これをマニピュレータのアクチュエータに出力する(例えば、特許文献1,2)。
In the above-described power assist device, the operator operates the manipulator to operate the manipulator, thereby moving the work held at the hand of the manipulator to a desired posture or position. Therefore, in the power assist device, the operation force of the worker applied to the operation element is detected by a force sensor, and the operation direction of the operation element is determined from the detected operation force. And the drive signal which moves a workpiece | work to the operation direction of the discriminate | determined operation element is produced | generated, and this is output to the actuator of a manipulator (for example,
上述した車両の製造ラインの場合、パワーアシスト装置によるワークの移動はアセンブリ工程で利用されることが多い。ワークをアセンブリ対象物の組付位置に移動させる場合には、アセンブリ対象物に近づくまでは大雑把にワークを移動させ、ある程度アセンブリ対象物に近づいた後はワークを細かく正確に組付位置に移動させることが望ましい。 In the case of the vehicle production line described above, the movement of the workpiece by the power assist device is often used in the assembly process. When moving the workpiece to the assembly target assembly position, move the workpiece roughly until it approaches the assembly target, and then move the workpiece to the assembly position finely and accurately after approaching the assembly target to some extent. It is desirable.
作業員が自力で移動させることができるワークの場合、ワークを大雑把に移動させようとしているのか、それとも、細かく移動させようとしているのかという、ワークの移動の仕方に関する作業員の意図は、作業員がワークに加える操作力に現れる。したがって、作業員がパワーアシスト装置を用いて操作子の操作によりワークを移動させる場合には、ワークの移動の仕方に関する作業員の意図は操作子の操作力に現れる。 In the case of a work that can be moved by the worker, the intention of the worker regarding how to move the work, whether the work is to be moved roughly or finely, Appears in the operating force applied to the workpiece. Therefore, when the worker moves the workpiece by operating the operator using the power assist device, the operator's intention regarding the movement of the workpiece appears in the operating force of the operator.
そこで、ワークの移動の仕方に関する作業員の意図を、力覚センサで検出される操作子の操作力から判断するには、少なくとも力覚センサの感度を上げる必要がある。しかし、力覚センサの感度を上げるのは、他軸干渉に起因して作業員の意図しない方向にワークが移動するのを防ぐ観点から、自ずと限界がある。また、力覚センサは元々高価なセンサであるため、これに対して高感度を要求するのは、コストの面からして現実的でない。 Therefore, in order to determine the operator's intention regarding how to move the workpiece from the operation force of the operator detected by the force sensor, at least the sensitivity of the force sensor needs to be increased. However, increasing the sensitivity of the force sensor is naturally limited from the viewpoint of preventing the workpiece from moving in a direction unintended by the worker due to interference with other axes. Further, since the force sensor is originally an expensive sensor, it is not practical from the viewpoint of cost to require high sensitivity.
また、上述したような操作子の操作力を力覚センサで検出する操作系の代わりに、ジョイスティックを傾動操作する操作系も提案されている(例えば、特許文献3)。しかし、この提案においても、ジョイスティックの傾倒角から、ワークの移動の仕方に関する作業員の意図を判断するような方法については、何ら言及されていない。 In addition, an operation system that tilts a joystick has been proposed instead of the operation system that detects the operation force of the operation element using a force sensor (for example, Patent Document 3). However, even in this proposal, there is no mention of a method for determining an operator's intention regarding a method of moving a workpiece from the tilt angle of the joystick.
上述したように、パワーアシスト装置において、操作子の操作力からワークをどのように移動させるのかという作業員の意図を判断するのは現実的に難しい。そこで、作業員の意図を判断する代わりに作業員の意図を推定することが考えられる。作業員の意図を推定するには、その意図が反映されるパラメータをセンシングし、センシングしたパラメータの内容から何某かの推定処理を行うことになる。この場合、推定精度が高くないと、却って作業員の意図とは異なる動作が行われて操作性を低下させる原因となってしまう。したがって、そのような推定処理を実行する装置は大がかりなものとなるのが必定であり、これも現実的とは言い難い。 As described above, in the power assist device, it is practically difficult to determine the operator's intention of how to move the workpiece from the operation force of the operator. Therefore, it is conceivable to estimate the worker's intention instead of judging the worker's intention. In order to estimate the worker's intention, a parameter that reflects the intention is sensed, and some estimation processing is performed from the content of the sensed parameter. In this case, if the estimation accuracy is not high, an operation different from the operator's intention is performed and the operability is deteriorated. Therefore, a device that performs such an estimation process must be a large-scale device, and this is also not realistic.
また、上述した問題は、ツールがワークをグリップして移動する場合に限ったものではなく、例えば、操作子の操作によりロボットの溶接トーチ等のツールが溶接対象箇所に向けて移動する場合等にも共通するものである。 The above-described problem is not limited to the case where the tool moves while gripping the workpiece. For example, when a tool such as a welding torch of a robot moves toward a welding target location by operating the operator, etc. Is also common.
本発明は前記事情に鑑みなされたもので、本発明の目的は、ロボットのツールセンターポイントを操作子の操作によって移動させる場合に、状況に応じてツールセンターポイントの移動速度を操作子の操作により操作性良く調整することができるロボット制御装置を提供することにある。 The present invention has been made in view of the above circumstances, and an object of the present invention is to change the movement speed of the tool center point by operating the operator according to the situation when the tool center point of the robot is moved by operating the operator. An object of the present invention is to provide a robot control device that can be adjusted with good operability.
上記目的を達成するため、請求項1に記載した本発明のロボット制御装置は、
操作子の操作に応じて、ツールセンターポイントを移動させるための駆動信号をロボットに対して出力するロボット制御装置において、
前記操作子の原点からの操作量に対する前記ツールセンターポイントの移動速度の特性を示す特性データを保持する特性データ保持手段と、
前記操作子の操作時に出力する前記駆動信号の内容を、前記特性データに示された前記操作子の原点からの操作量に対応する移動速度で前記ツールセンターポイントが移動するように前記ロボットを駆動させる内容とする信号内容決定手段と、
を備えており、
前記操作子の原点からの操作量に関するレンジのうち前記操作子の最大操作量を少なくとも除くレンジ部分の前記特性は、前記操作子の原点からの操作量が小さい場合よりも大きい場合の方が、前記操作子の操作の変化量に対する前記ツールセンターポイントの移動速度の変化量が相対的に大きい特性である、
ことを特徴とする。
In order to achieve the above object, a robot control apparatus according to the present invention described in
In the robot control device that outputs a drive signal for moving the tool center point to the robot in accordance with the operation of the operator,
Characteristic data holding means for holding characteristic data indicating the characteristic of the moving speed of the tool center point with respect to the operation amount from the origin of the operator;
The robot is driven so that the tool center point moves at the moving speed corresponding to the operation amount from the origin of the operating element indicated in the characteristic data, based on the content of the driving signal output when operating the operating element. Signal content determining means to be content to be
With
Of the range related to the operation amount from the origin of the operation element, the characteristic of the range portion excluding at least the maximum operation amount of the operation element is greater when the operation amount from the origin of the operation element is smaller than The amount of change in the movement speed of the tool center point relative to the amount of change in operation of the operator is a characteristic that is relatively large.
It is characterized by that.
請求項1に記載した本発明のロボット制御装置によれば、操作レバーの原点からの操作量が小さいと、操作子の操作量に対するツールセンターポイントの移動速度の変化量が小さく、操作子の原点からの操作量が大きいと、操作子の操作量に対するツールセンターポイントの移動速度の変化量が大きい。したがって、操作子が原点から遠い(原点からの操作量が大きい)ときには、操作子が原点に近い(原点からの操作量が小さい)ときに比べて、操作子の操作量が同じでもツールセンターポイントの移動速度が大きく変化する。これにより、ツールセンターポイントの移動速度を、操作者の操作による操作子の原点からの操作量によって、操作性良く調整することができる。例えば、ワークをアセンブリ対象物の組付位置に移動させる場合に、アセンブリ対象物に近づくまでは大雑把にワークを移動させ、ある程度アセンブリ対象物に近づいた後はワークを細かく正確に組付位置に移動させることができる。
According to the robot control apparatus of the present invention described in
さらに、請求項1に記載した本発明のロボット制御装置は、前記特性が、前記レンジ部分を超える前記操作子の各操作量に対して、前記ツールセンターポイントの最大移動速度がそれぞれ割り当てられた特性であり、かつ、前記原点からの操作量が最も小さいレンジでは、前記操作の変化量に対する前記ツールセンターポイントの移動速度の変化量が相対的に最も小さく、前記原点からの操作量が中程度のレンジでは、前記操作の変化量に対する前記ツールセンターポイントの移動速度の変化量が相対的に最も大きく、前記原点からの操作量が最も大きいレンジでは、前記操作の変化量に対する前記ツールセンターポイントの移動速度の変化量が相対的に中程度である特性であることを特徴とする。
Further, the robot control apparatus of the present invention according to
請求項1に記載した本発明のロボット制御装置によれば、操作子の操作量が、操作子の最大操作量を少なくとも除くレンジ部分を超えると、ツールセンターポイントが最大速度で移動する状態が維持される。このため、操作子を厳密に最大操作量まで操作しなくても、それに近い操作量まで大まかに操作することで、ツールセンターポイントが大雑把に高速移動する状態にすることができる。
According to the robot controller of the present invention as set forth in
また、請求項2に記載した本発明のロボット制御装置は、請求項1に記載した本発明のロボット制御装置において、前記特性データ保持手段が、内容の異なる複数パターンの前記特性に対応して前記特性データを複数保持しており、又は、前記特性をパラメータ化した特性式を前記特性データとして保持しており、複数の前記特性データから所望の特性データを選択し、又は、前記特性式の変数に代入する変数値を選択する選択手段をさらに備えており、前記信号内容決定手段が、前記操作子の操作時に出力する前記駆動信号の内容を、前記選択手段が選択した所望の特性データによって示される前記特性に応じた内容、又は、前記選択手段が選択した変数値を変数に代入した前記特性式によって表される前記特性に応じた内容とすることを特徴とする。
Further, the robot control apparatus of the present invention as set forth in
請求項2に記載した本発明のロボット制御装置によれば、請求項1に記載した本発明のロボット制御装置において、選択手段により所望の特性データを選択するか、あるいは、所望の変数値を選択することで、操作子の操作量に対応するツールセンターポイントの移動速度が、操作者の好みに応じた特性となる。このため、例えば、複数の操作者でロボット制御装置を共有して使用する場合に、それぞれの操作者が自身の好みに応じた特性で操作子の操作によるツールセンターポイントの移動を行うことができる。
According to the robot control apparatus of the present invention described in
また、請求項3に記載した本発明のロボット制御装置は、請求項1又は2に記載した本発明のロボット制御装置において、前記ロボットがワークの移動をアシストするパワーアシスト装置であることを特徴とする。 According to a third aspect of the present invention, there is provided the robot control device according to the first aspect of the present invention, wherein the robot is a power assist device that assists the movement of the workpiece. To do.
請求項3に記載した本発明のロボット制御装置によれば、請求項1又は2に記載した本発明のロボット制御装置において、パワーアシスト装置によってワークを移送する場合に、操作者の操作による操作子の原点からの操作量によって、ワークの移動速度を操作性良く調整することができる。
According to the robot control device of the present invention described in
本発明のロボット制御装置によれば、現在位置と移動先との位置関係に応じたワークのロボットによる移動を操作子の操作によって実現することができる。 According to the robot control apparatus of the present invention, the movement of the workpiece by the robot according to the positional relationship between the current position and the movement destination can be realized by operating the operator.
以下、本発明の実施形態について図面を参照しながら説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
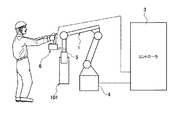
図1は本発明の一実施形態に係るロボット制御装置とそれによって制御されるロボット装置の構成を示す模式的な側面図である。 FIG. 1 is a schematic side view showing a configuration of a robot control device according to an embodiment of the present invention and a robot device controlled thereby.
図1に示す本実施形態のロボット制御装置によって制御されるロボット装置4は、例えば、マニピュレータ1を有し、このマニピュレータ1により、ワーク101の把持、運搬、加工及び他の部材への組立が可能となされているものである。
A
マニピュレータ1は、複数のアームを接続した多関節型アームで構成されている。このマニピュレータ1は、後述するロータリアクチュエータ4a〜4f(図5参照)によって空間6自由度の位置及び姿勢を決定することができる。各ロータリアクチュエータ4a〜4fは、ロボット制御装置を構成するコントローラ3によって制御される。
The
マニピュレータ1の先端側には、ワーク101を把持したり加工したりするツール5が設けられている。このツール5は、コントローラ3によって制御される。
A
図2は図1の操作装置の構成を示す斜視図である。操作装置6は、この実施の形態においては、図2に示すように、ロボット装置4の可動部(マニピュレータ1)に取り付けられている。ただし、この操作装置6は、後述するように、ロボット装置4から離れた位置に設置して用いてもよい。この操作装置6は、固定レバー7と操作レバー8と表示灯9とを有している。
FIG. 2 is a perspective view showing the configuration of the operating device of FIG. In this embodiment, the operating
固定レバー7は、イネーブルスイッチ10と緊急停止スイッチ11とを有している。イネーブルスイッチ10は、初期位置(以下、非押圧位置という。)と、図2中矢印Aで示すように、非押圧位置よりも押圧された押圧位置(以下、中間位置という。)と、中間位置よりも押圧された押込み位置との3つのポイントのいずれかとなされるようになっている。なお、イネーブルスイッチ10は、外力が加えられない場合には、非押圧位置に復帰するようになっている。緊急停止スイッチ11は、押圧するとロボット装置4の動作が即座に停止するようになっている。
The fixed
そして、コントローラ3は、イネーブルスイッチ10が押圧位置であるときに、ロボット装置4のマニピュレータ1の手動操作を可能とする。この手動操作は、操作レバー8を操作することによって行われる。
Then, the
操作レバー8(請求項中の操作子に相当)は、本実施形態では、作業員(以下、「操作者」という。)によって操作されるジョイスティックを用いて構成されている。この操作レバー8は、原点から360°の各方向に平行移動及び傾動させることができる。また、操作レバー8は、原点に対して操作レバー8の中心軸方向に移動させることができる。さらに、操作レバー8は、原点に対して操作レバー8の中心軸の周りに回転可能に構成されている。操作レバー8を前後左右又は上下に移動させると、ツール5のツールセンターポイントが前後左右又は上下に移動する。操作レバー8を前後左右に傾動させるとツールセンターポイントが前後左右に旋回する。操作レバー8をその中心軸の周りに回転させると、ツールセンターポイントが水平面内で旋回する。操作レバー8の移動や傾動、回転とその操作量は、力覚センサ8aによって検出することができる。操作者が操作を止めると、操作レバー8は原点に復帰する。
In the present embodiment, the operation lever 8 (corresponding to the operation element in the claims) is configured by using a joystick operated by an operator (hereinafter referred to as “operator”). The
力覚センサ8aは、操作者による操作レバー8の操作量を操作方向別に検出するためのものである。本実施形態では、力覚センサ8aとして6軸力覚センサを用いている。この力覚センサ8aは、力覚センサ8aに加わる力3成分(Fx,Fy,Fz)とモーメント3成分(θx,θy,θz)をそれぞれ検出して、それぞれに応じた内容の信号を出力する。
The
表示灯9は、ロボット装置4の手動操作が可能であることを告知するものである。この表示灯9は、イネーブルスイッチ10が押圧位置にあるときに点灯し、ロボット装置4の手動操作が可能となっていることを告知(表示)する。このとき、操作者は、表示灯9が点灯したことを確認し、操作レバー8によりロボット装置4を手動操作することができることを認識してから、操作レバー8によりロボット装置4を手動操作することができる。
The
そして、操作者がイネーブルスイッチ10を離して、イネーブルスイッチ10が非押圧位置へ移動した場合、または、操作者がイネーブルスイッチ10をさらに押し、イネーブルスイッチ10が押込み位置へ移動した場合には、ロボット装置4は、手動操作不可能となる。このとき、表示灯9は消灯し、ロボット装置4の手動操作が不可能となっていることを告知(表示)する。操作者の意図しない力加減によって、イネーブルスイッチ10が中間位置より外れた場合にも、表示灯9が消灯することにより、操作者は、手動操作が不可能となったことを認識することができる。
When the operator releases the enable
また、例えば、自動運転中など、ロボット装置4が操作装置6による手動操作を受け付けない状態であるときには、操作者がイネーブルスイッチ10を押して中間位置へ移動させたとしても、ロボット装置4は手動操作可能とならない。この場合には、イネーブルスイッチ10が中間位置であったとしても、表示灯9は点灯しない。操作者は、表示灯9が点灯しないことにより、ロボット装置4が手動操作不可能な状態であることを認識することができる。
Further, for example, when the
このようなロボット装置4は、図3及び図4に示すように、操作者がワーク101を運ぶときのパワーアシスト装置となる。したがって、操作者は、操作装置6のイネーブルスイッチ10や操作レバー8の操作によって、ツール5にグリップされたワーク101を任意の位置に任意の姿勢で移動することができる。ロボット装置4のツール5やアクチュエータ4a〜4f(図5参照)は、コントローラ3の制御によって駆動される。
As shown in FIGS. 3 and 4, the
そして、本実施形態に係るロボット制御装置は、コントローラ3と、このコントローラ3に接続された操作装置6とから構成される。
The robot control device according to the present embodiment includes a
次に、本実施形態のロボット制御装置の電気的な構成を説明する。図5は図1のロボット制御装置の電気的な概略構成を示すブロック図である。 Next, the electrical configuration of the robot control apparatus of this embodiment will be described. FIG. 5 is a block diagram showing a schematic electrical configuration of the robot control apparatus of FIG.
まず、コントローラ3は、機能ブロック的に表現すると、力覚センサ8aの力3成分(Fx,Fy,Fz)とモーメント3成分(θx,θy,θz)の各出力を、それぞれの初期値(操作レバー8が原点にあるときの力覚センサ8aの出力)を差し引いてゼロ点補正する機能を有している。これにより、力覚センサ8aに操作者から加えられた操作量(力3成分、モーメント3成分)が得られる。
First, when expressed in terms of functional blocks, the
また、コントローラ3は、力覚センサ8aに操作者から加えられた操作量(力3成分、モーメント3成分)を、力覚センサ8aの位置を原点とする座標系から操作レバー8の操作者から操作力を受ける位置を原点とする座標系に、座標変換処理する機能を有している。これにより、操作レバー8に操作者から加えられた操作量の力3成分(Fx,Fy,Fz)及びモーメント3成分(Mx,My,Mz)が得られる。
Further, the
さらに、コントローラ3は、操作レバー8に操作者から加えられた操作量の力3成分(Fx,Fy,Fz)及びモーメント3成分(Mx,My,Mz)を、操作レバー8の操作者から操作力を受ける位置を原点とする座標系からツール5のツールセンターポイント(TCP)を原点とする座標系に、座標変換処理する機能を有している。これにより、操作者による操作レバー8の操作量に対応するツールセンターポイントの移動速度(x,y,z,θx,θy,θz)が得られる。この座標変換は、コントローラ3のメモリ(図示せず)に記憶されている、操作レバー8の操作量に対するツール5のツールセンターポイントの移動速度の特性データを参照して行われる。
Further, the
また、コントローラ3は、操作者による操作レバー8の操作量に対応する移動速度(x,y,z,θx,θy,θz)でツールセンターポイントが移動するように、マニピュレータ1の各ロータリアクチュエータ4a〜4fを駆動させるための、各ロータリアクチュエータ4a〜4fに対する駆動信号を生成し、ロボット装置4に出力する。
Further, the
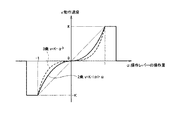
操作レバー8の操作量に対するツール5のツールセンターポイントの移動速度の特性データは、例えば、図6の説明図に示す参考例のように定義することができる。なお、図6では1つの成分について示しているが、力3成分及びモーメント3成分の各成分について、それぞれ図6に示すように特性データを定義することができる。
Characteristic data of the moving speed of the tool center point of the
図6では、操作レバー8の原点からの操作量を横軸に取り、ツールセンターポイントの移動速度を縦軸に取って、特性データの内容を示している。図6に示す特性データでは、操作レバー8の原点からの操作量の全範囲(プラス側マイナス側それぞれ)に亘って、べき乗を含む多項式関数を用いて定義しても良い。この場合、例えは図6中実線で示す2乗の指数関数よりも、同じく破線で示す3乗の指数関数の方が、操作レバー8の原点からの操作量が小さいレンジと大きいレンジとで、操作レバー8の操作量の変化に対するツールセンターポイントの移動速度の変化の度合いを、大きく変化させることができる。なお、図6ではべき乗を含む多項式関数による曲線を用いて特性データを定義しているが、べき乗関数、多項式関数、又は、指数関数による曲線や、ベジェ曲線、あるいは、正弦曲線等によって、特性データが定義されるものとしてもよい。In FIG. 6, the operation amount from the origin of the
図7は、上述したような曲線を用いて定義された、コントローラ3の不図示のメモリに記憶される本実施形態の特性データの内容を示す説明図である。この特性データは、操作レバー8の原点に対する操作量のプラス側もマイナス側も、それぞれ、操作レバー8の原点からの操作量が0〜a1(0〜−a1)までのレンジ、a1〜a2(−a1〜−a2)までのレンジ、a2〜1(−a2〜−1)までのレンジ(但し、0<a1<a2<1,−1<−a2<−a1<0)の3つに大きく分けることができる。
Figure 7 is an explanatory diagram showing the contents of the characteristic data of the present embodiment which is defined using a curve as described above, Ru stored in a memory (not shown) of the
このうち、操作レバー8の原点からの操作量が最も小さいレンジ(操作量=0〜±a1)では、操作レバー8の操作の変化量に対するツールセンターポイントの移動速度の変化量が相対的に最も小さい。次に、操作レバー8の原点からの操作量が中程度のレンジ(操作量=±a1〜±a2)では、操作レバー8の操作の変化量に対するツールセンターポイントの移動速度の変化量が相対的に最も大きい。最後に、操作レバー8の原点からの操作量が最も大きいレンジ(操作量=±a2〜±1)では、操作レバー8の操作の変化量に対するツールセンターポイントの移動速度の変化量が相対的に中程度である。なお、操作レバー8の原点からの操作量が最も大きいレンジ(操作量=±a2〜±1)だけが、操作レバー8の操作の変化量が大きくなればなるほど、ツールセンターポイントの移動速度の変化量が徐々に小さくなる。他の2つのレンジ(操作量=0〜±a1,±a1〜±a2)では、操作レバー8の操作の変化量が大きくなればなるほど、ツールセンターポイントの移動速度の変化量が徐々に大きくなる。
Among these, in the range where the operation amount from the origin of the
したがって、操作レバー8の原点からの操作量が最も小さいレンジ(操作量=0〜±a1)では、操作者が操作レバー8の操作量を変化させても、ツールセンターポイントの移動速度はさほど変化しない。なお、操作レバー8を原点に近いところで操作した場合と、原点から離れたところで操作レバー8を操作した場合とでは、操作の変化量が同じでも後者の方が、ツールセンターポイントの移動速度の変化量が大きくなる。
Therefore, in the range where the operation amount from the origin of the
また、操作レバー8の原点からの操作量が中程度のレンジ(操作量=±a1〜±a2)では、操作者が操作レバー8の操作量を変化させると、ツールセンターポイントの移動速度が大きく変化する。なお、操作レバー8をレンジの最小値である±a1に近いところで操作した場合と、レンジの最大値である±a2に近いところで操作レバー8を操作した場合とでは、操作の変化量が同じでも後者の方が、ツールセンターポイントの移動速度の変化量が大きくなる。
In the range where the operation amount from the origin of the
さらに、操作レバー8の原点からの操作量が最も大きいレンジ(操作量=±a2〜±1)では、操作者が操作レバー8の操作量を変化させても、ツールセンターポイントの移動速度は、高速のままさほど変化しない。但し、操作レバー8をレンジの最小値である±a2に近いところで操作した場合と、レンジの最大値である±1に近いところで操作レバー8を操作した場合とでは、操作の変化量が同じでも前者の方が、ツールセンターポイントの移動速度の変化量が大きくなる。
Further, in the range where the operation amount from the origin of the
図7に示す特性データでは、操作レバー8の原点からの操作量が0から±a1までの部分も、±a1から±a2までの部分も、±a2から±1までの部分も、縦軸と横軸との関係が曲線によって定義される。なお、操作レバー8の原点からの操作量の各レンジの境界において、それぞれの特性がスムーズにつながるように、それぞれのレンジの特性を定義する曲線を選んでいる。
In the characteristic data shown in FIG. 7, the portion where the operation amount from the origin of the
図7に示す特性データによれば、操作レバー8の原点からの操作量が最も小さいレンジ(操作量=0〜±a1)においては、ツールセンターポイントの移動速度を低速としてツール5の移動速度の微調整を行いやすくすることができる。これに対し、操作レバー8の原点からの操作量が最も小さいレンジを超えるレンジ(操作量=±a1〜±1)においては、ツールセンターポイントの移動速度を高速としてツール5を大雑把に移動させることができる。このため、ツールセンターポイント(ツール5)が高速で移動する操作レバー8の操作レンジを拡げて、ツール5乃至ワーク101の大雑把な移動を行いやすくすることができる。
According to the characteristic data shown in FIG. 7, in the range where the operation amount from the origin of the
このように、図7に示す特性データでは、操作レバー8の原点からの操作量が最も大きいレンジ(操作量=±a2〜±1)に対して曲線の特性を選択し、中程度のレンジ(操作量=±a1〜±a2)の特性とスムーズにつながるようにした。なお、図8の説明図に示す特性データの参考例では、操作レバー8の原点からの操作量が最も大きいレンジ(操作量=±a2〜±1)においては、操作レバー8の操作量が変化してもツールセンターポイントの移動速度が最高速度に固定されるようにしている。このような特性データでは、ツールセンターポイント(ツール5)が高速で移動する操作レバー8の操作レンジを拡げて、ツール5乃至ワーク101の大雑把な移動を行いやすくすることができる。しかも、操作レバー8を厳密に最大操作量まで操作しなくても、ツールセンターポイント(ツール5)が最大速度で移動するので、ツール5乃至ワーク101の大雑把な移動を操作レバー8の大まかな操作で実行することができる。
Thus, in the characteristic data shown in FIG. 7, the curve characteristic is selected for the range where the operation amount from the origin of the
このように、本実施形態によれば、操作者が操作装置6の操作レバー8を操作(平行移動、傾動、回転)してツールセンターポイントを移動させる場合、操作レバー8を原点に近いところで操作すれば、ツールセンターポイントを低い速度で移動させて操作レバー8の操作によりツールセンターポイントの移動速度を細かく調整することができる。また、操作レバー8を原点から離れたところで操作すれば、ツールセンターポイントを高速で移動させることができる。このため、ツール5にグリップされたワーク101を必要に応じて大雑把に移動させたり細かく移動させたりすることができる。
Thus, according to the present embodiment, when the operator operates the
即ち、本実施形態によれば、操作レバー8の原点からの操作量(平行移動量、傾動量、回転量)を変えると、操作レバー8の操作量に対するツールセンターポイントの移動速度の変化量が変わる。つまり、操作レバー8の操作によるツールセンターポイントの移動速度の分解能が変化することになる。したがって、操作レバー8の原点からの操作量の調整でツールセンターポイントの移動速度の分解能を容易に変更して、状況に応じてツールセンターポイントの移動速度を操作レバー8の操作によって操作性良く調整することができる。
That is, according to the present embodiment, when the operation amount (parallel movement amount, tilt amount, rotation amount) from the origin of the
なお、操作子は、本実施形態で説明したようなジョイスティックによる操作レバー8に限定されない。即ち、操作子の操作によってツールセンターポイントを移動させる対象のロボットにおける、マニピュレータの自由度に応じた数の動きを入力できるものであれば、ジョイスティックのような操作レバー以外のものであっても良い。
The operation element is not limited to the
また、ワーク101やツール5の形態は、上述した実施形態で示したものに限定されず、任意である。例えば、ツールが溶接トーチであって、操作子の操作により溶接トーチを目的の溶接箇所に移動させる場合等にも、本発明は広く適用可能である。
Moreover, the form of the workpiece | work 101 and the
さらに、本実施形態では、ワーク101の移動をアシストするパワーアシスト装置として使用するロボット装置4の駆動を制御する際に、本発明を適用した場合を例に取って説明した。しかし、本発明は、パワーアシスト装置として利用するロボット以外にも、ワークをツールでグリップして操作子の操作により動くロボットであれば、その駆動制御に広く適用可能である。例えば、単にワークを搬送するロボットの制御や、研磨、加工用のサンダー(砥石)にワークを当て付けるロボットの制御にも、本発明を適用することができる。即ち、本発明は、ワークを持ち運ぶ作業を行うロボット全般の制御に適用することができる。
Furthermore, in this embodiment, the case where the present invention is applied when controlling the driving of the
1 マニピュレータ
3 コントローラ
4 ロボット装置
4a ロータリアクチュエータ
4b ロータリアクチュエータ
4c ロータリアクチュエータ
4d ロータリアクチュエータ
4e ロータリアクチュエータ
4f ロータリアクチュエータ
5 ツール
6 操作装置
7 固定レバー
8 操作レバー(操作子)
8a 力覚センサ
9 表示灯
10 イネーブルスイッチ
11 緊急停止スイッチ
101 ワーク
DESCRIPTION OF
Claims (3)
前記操作子の原点からの操作量に対する前記ツールセンターポイントの移動速度の特性を示す特性データを保持する特性データ保持手段と、
前記操作子の操作時に出力する前記駆動信号の内容を、前記特性データに示された前記操作子の原点からの操作量に対応する移動速度で前記ツールセンターポイントが移動するように前記ロボットを駆動させる内容とする信号内容決定手段と、
を備えており、
前記操作子の原点からの操作量に関するレンジのうち前記操作子の最大操作量を少なくとも除くレンジ部分の前記特性は、前記操作子の原点からの操作量が小さい場合よりも大きい場合の方が、前記操作子の操作の変化量に対する前記ツールセンターポイントの移動速度の変化量が相対的に大きい特性であり、
かつ、前記特性は、前記レンジ部分を超える前記操作子の各操作量に対して、前記ツールセンターポイントの最大移動速度がそれぞれ割り当てられた特性であり、
かつ、前記特性は、前記原点からの操作量が最も小さいレンジでは、前記操作の変化量に対する前記ツールセンターポイントの移動速度の変化量が相対的に最も小さく、前記原点からの操作量が中程度のレンジでは、前記操作の変化量に対する前記ツールセンターポイントの移動速度の変化量が相対的に最も大きく、前記原点からの操作量が最も大きいレンジでは、前記操作の変化量に対する前記ツールセンターポイントの移動速度の変化量が相対的に中程度である特性である、
ことを特徴とするロボット制御装置。 In the robot control device that outputs a drive signal for moving the tool center point to the robot in accordance with the operation of the operator,
Characteristic data holding means for holding characteristic data indicating the characteristic of the moving speed of the tool center point with respect to the operation amount from the origin of the operator;
The robot is driven so that the tool center point moves at the moving speed corresponding to the operation amount from the origin of the operating element indicated in the characteristic data, based on the content of the driving signal output when operating the operating element. Signal content determining means to be content to be
With
Of the range related to the operation amount from the origin of the operation element, the characteristic of the range portion excluding at least the maximum operation amount of the operation element is greater when the operation amount from the origin of the operation element is smaller than The change amount of the moving speed of the tool center point with respect to the change amount of the operation of the operation element is a relatively large characteristic,
And, the characteristic is a characteristic in which the maximum moving speed of the tool center point is assigned to each operation amount of the operation element exceeding the range portion,
And, in the characteristic, in the range where the operation amount from the origin is the smallest, the change amount of the movement speed of the tool center point relative to the operation change amount is relatively the smallest, and the operation amount from the origin is medium In this range, the amount of change in the movement speed of the tool center point relative to the amount of change in the operation is relatively largest, and in the range where the amount of operation from the origin is the largest, the change in the tool center point relative to the amount of change in the operation. It is a characteristic that the amount of change in moving speed is relatively moderate.
A robot controller characterized by that.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009117547A JP5572994B2 (en) | 2009-05-14 | 2009-05-14 | Robot controller |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009117547A JP5572994B2 (en) | 2009-05-14 | 2009-05-14 | Robot controller |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010264539A JP2010264539A (en) | 2010-11-25 |
| JP5572994B2 true JP5572994B2 (en) | 2014-08-20 |
Family
ID=43361995
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009117547A Active JP5572994B2 (en) | 2009-05-14 | 2009-05-14 | Robot controller |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5572994B2 (en) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5347705B2 (en) * | 2009-05-14 | 2013-11-20 | 株式会社Ihi | Robot controller |
| EP2684652A1 (en) | 2012-07-09 | 2014-01-15 | Eppendorf Ag | Operating device for controlling a movement device and method |
| JP2015024461A (en) * | 2013-07-25 | 2015-02-05 | 株式会社Ihi | Method and device for control of robotic hand |
| JP6238110B2 (en) * | 2013-07-25 | 2017-11-29 | 株式会社Ihi | Robot hand control method and control device |
| US10016900B1 (en) * | 2017-10-10 | 2018-07-10 | Auris Health, Inc. | Surgical robotic arm admittance control |
| JP6784660B2 (en) | 2017-11-28 | 2020-11-11 | ファナック株式会社 | Input device and robot control system |
| CN113319866B (en) * | 2021-06-10 | 2024-03-26 | 潍坊新松机器人自动化有限公司 | Intelligent robot load balancing lifting appliance |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02279285A (en) * | 1989-04-19 | 1990-11-15 | Toshiba Corp | Method and device for controlling master/slave manipulator |
| JP2831221B2 (en) * | 1992-12-21 | 1998-12-02 | 日立機電工業株式会社 | Speed control method of overhead crane |
| JPH10202568A (en) * | 1997-01-17 | 1998-08-04 | Mitsubishi Heavy Ind Ltd | Industrial robot and its teaching method |
| JP4518598B2 (en) * | 1999-09-22 | 2010-08-04 | 富士重工業株式会社 | Self-propelled robot control device |
| JP2003128397A (en) * | 2001-10-22 | 2003-05-08 | Nippon Yusoki Co Ltd | Accelerator of electric vehicle |
| JP4631856B2 (en) * | 2007-02-08 | 2011-02-16 | トヨタ自動車株式会社 | Work assistance device, work assistance method, and work rotation device used for the work |
| JP2008213119A (en) * | 2007-03-07 | 2008-09-18 | Institute Of Physical & Chemical Research | Collaborative work robot and its control method |
| JP2009012125A (en) * | 2007-07-05 | 2009-01-22 | Shin Meiwa Ind Co Ltd | Power assist robot |
| JP2009034755A (en) * | 2007-07-31 | 2009-02-19 | Toyota Motor Corp | Power assist device and control method thereof |
-
2009
- 2009-05-14 JP JP2009117547A patent/JP5572994B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010264539A (en) | 2010-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5572994B2 (en) | Robot controller | |
| JP6619395B2 (en) | Robot system and robot teaching method | |
| JP4517726B2 (en) | Assist device | |
| JP5678979B2 (en) | Robot system, calibration method, and workpiece manufacturing method | |
| CN102239454B (en) | Method and device for inputting commands into a control of a manipulator | |
| US10300597B2 (en) | Robot and method of operating robot | |
| DK2566667T3 (en) | Hand-held device and method for controlling and / or programming of a manipulator | |
| WO2017033351A1 (en) | Remote control robot system | |
| JP5946859B2 (en) | Robot control device and robot system for robots that move according to force | |
| JP5338297B2 (en) | Robot control device | |
| CN106493711B (en) | Controls, Robots, and Robotic Systems | |
| WO2017064851A1 (en) | Method for teaching robot and device for controlling robot arm | |
| JP6806036B2 (en) | Main mold and core fitting device, and main mold and core fitting method | |
| JP2014217913A (en) | Operation teaching method of parallel link robot and parallel link robot | |
| JP2021030364A (en) | Robot control device | |
| JP2010231575A (en) | Device and method for instruction of off-line of robot, and robot system | |
| US11518026B2 (en) | Control method and calculation device | |
| US20210129322A1 (en) | Control Method And Calculation Device | |
| JP7157275B1 (en) | Robot controller and robot system | |
| JP4822067B2 (en) | Robot and its direct teaching device | |
| JP4461994B2 (en) | Master / slave manipulator controller | |
| JP2013220501A (en) | Robot control method and robot control device | |
| JP5347705B2 (en) | Robot controller | |
| JP2009214257A (en) | Robot teaching method | |
| JP2021065943A (en) | Robot system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130318 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130326 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130527 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140107 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140603 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140616 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5572994 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |