JP5355328B2 - Control device for inverted pendulum type vehicle - Google Patents
Control device for inverted pendulum type vehicle Download PDFInfo
- Publication number
- JP5355328B2 JP5355328B2 JP2009218313A JP2009218313A JP5355328B2 JP 5355328 B2 JP5355328 B2 JP 5355328B2 JP 2009218313 A JP2009218313 A JP 2009218313A JP 2009218313 A JP2009218313 A JP 2009218313A JP 5355328 B2 JP5355328 B2 JP 5355328B2
- Authority
- JP
- Japan
- Prior art keywords
- footrest
- mode
- boarding
- occupant
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000009471 action Effects 0.000 claims abstract description 231
- 230000007704 transition Effects 0.000 claims abstract description 44
- 230000033001 locomotion Effects 0.000 claims description 85
- 230000008859 change Effects 0.000 claims description 33
- 238000001514 detection method Methods 0.000 claims description 24
- 230000001052 transient effect Effects 0.000 claims description 9
- 238000012545 processing Methods 0.000 description 171
- 230000036544 posture Effects 0.000 description 64
- 238000000034 method Methods 0.000 description 61
- 230000008569 process Effects 0.000 description 59
- 230000005484 gravity Effects 0.000 description 49
- 230000014509 gene expression Effects 0.000 description 48
- 230000001133 acceleration Effects 0.000 description 33
- 238000013459 approach Methods 0.000 description 33
- 230000000670 limiting effect Effects 0.000 description 15
- 238000005259 measurement Methods 0.000 description 15
- 238000006243 chemical reaction Methods 0.000 description 12
- 230000002093 peripheral effect Effects 0.000 description 10
- 230000000284 resting effect Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 7
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 6
- 238000012937 correction Methods 0.000 description 5
- 230000035945 sensitivity Effects 0.000 description 5
- 239000000758 substrate Substances 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 241000257465 Echinoidea Species 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K1/00—Unicycles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J25/00—Foot-rests; Knee grips; Passenger hand-grips
- B62J25/04—Floor-type foot rests
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K11/00—Motorcycles, engine-assisted cycles or motor scooters with one or two wheels
- B62K11/007—Automatic balancing machines with single main ground engaging wheel or coaxial wheels supporting a rider
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/46—Wheel motors, i.e. motor connected to only one wheel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/46—Drive Train control parameters related to wheels
- B60L2240/465—Slip
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Motorcycle And Bicycle Frame (AREA)
Abstract
Description
本発明は、床面上を全方向に移動可能な倒立振子型車両の制御装置に関する。 The present invention relates to a control device for an inverted pendulum type vehicle that is movable in all directions on a floor surface.
倒立振子型車両は、床面上を移動する移動動作部と、この移動動作部を駆動するアクチュエータ装置とが組み付けられた基体に、鉛直方向に対して傾動自在な乗員の搭乗部が組み付けられた車両であり、搭乗部の傾斜角度をある目標角度に保つために(搭乗部が傾倒しないようにするために)、倒立振子の支点を動かすような形態で、移動動作部を移動させる必要がある車両である。 In an inverted pendulum type vehicle, a passenger's riding section that is tiltable with respect to the vertical direction is assembled to a base body on which a moving operation unit that moves on the floor surface and an actuator device that drives the moving operation unit are assembled. In order to keep the inclination angle of the riding section at a certain target angle (in order to prevent the riding section from tilting), it is necessary to move the moving operation unit in such a manner that the fulcrum of the inverted pendulum is moved. It is a vehicle.
そして、床面上を全方向(2次元的な全方向)に移動可能な移動動作部を備え、また、乗員の搭乗部が、前後方向及び左右方向の2軸周りに傾動可能な倒立振子型車両の制御技術としては、例えば、特許文献1に見られるものが本願出願人により提案されている。
In addition, an inverted pendulum type that includes a moving operation unit that can move in all directions (two-dimensional all directions) on the floor surface, and that allows the riding section of the occupant to tilt about two axes in the front-rear direction and the left-right direction. As the vehicle control technology, for example, the one shown in
この特許文献1には、乗員の搭乗部が組み付けられた車両の基体が球体状の移動動作部に対して前後方向の軸周りと左右方向の軸周りとの2軸周りに傾動自在に設けられた倒立振子型車両の制御技術が記載されている。この技術では、基体の傾斜角度(=搭乗の傾斜角度)の計測値と目標傾斜角度との偏差を“0”に近づけると共に、アクチュエータ装置としてのモータの速度(ひいては移動動作部の移動速度)の計測値と目標速度との偏差を“0”に近づけるようにモータの駆動トルク(移動動作部の前後方向の移動させるモータの駆動トルクと左右方向に移動させるモータの駆動トルクとの組)が逐次決定される。そして、その決定した駆動トルクに応じて、移動動作部の移動動作がモータを介して制御される。
In this
なお、床面上を全方向に移動可能な移動動作部を備え、倒立振子型車両として機能し得る車両としては、例えば、特許文献2、3に見られるものも本願出願人により提案されている。
In addition, as a vehicle having a moving operation unit that can move in all directions on the floor surface and capable of functioning as an inverted pendulum type vehicle, for example, those shown in
ところで、例えば特許文献2の図10、あるいは、特許文献3の図8に見られる如き倒立振子型車両、すなわち、乗員がその左右の足を載せる足載せ部(ステップ)を搭乗部として備え、この足載せ部上に乗員が起立した姿勢で搭乗するようにした形態の倒立振子型車両では、乗員が搭乗しようとする時には、通常、乗員は、その一方の足を足載せ部に載せた後に、他方の足を足載せ部に載せるという行為を行なう。また、乗員が降車しようとする時には、通常、乗員は、その一方の足を足載せ部から離脱させて接地させた後に、他方の足を足載せ部から離脱させて接地させるという行為を行なう。
By the way, for example, an inverted pendulum type vehicle as shown in FIG. 10 of
この場合、これらの搭乗行為あるいは降車行為の最中において、乗員が搭乗している状態と同じ態様で移動動作部の制御を行なうと、該搭乗行為あるいは降車行為のために足載せ部を基体と共に傾斜させることに起因して、移動動作部が動いてしまい易い。 In this case, during the boarding action or the getting-off action, if the movement operation unit is controlled in the same manner as the state where the occupant is on board, the footrest part together with the base for the boarding action or the getting-off action is used. Due to the inclination, the moving operation unit tends to move.
しかるに、特許文献1に見られる如き従来の制御技術では、搭乗行為や降車行為における倒立振子型車両の制御技術や、その制御における課題が十分に検討されていない。このため、搭乗行為や降車行為を円滑に行なうために熟練を要するものとなってしまう恐れがある。
However, in the conventional control technology as shown in
本発明は、かかる背景に鑑みてなされたものであり、乗員が搭乗行為や降車行為を行い易くなるようにすることができる倒立振子型車両の制御装置を提供することを目的とする。 The present invention has been made in view of such a background, and an object of the present invention is to provide an inverted pendulum type vehicle control device that enables an occupant to easily perform a boarding action and a getting-off action.
本発明の一態様の倒立振子型車両の制御装置は、かかる目的を達成するために、床面上を互いに直交する第1の方向及び第2の方向を含む全方向に移動可能な移動動作部と、該移動動作部を駆動するアクチュエータ装置と、該移動動作部及びアクチュエータ装置が組付けられた基体と、該基体に組み付けられ、前記第1の方向の軸周りと前記第2の方向の軸周りとの2軸周りで鉛直方向に対して傾動自在に設けられた乗員用の足載せ部とを備え、乗員がその両足を左右方向に間隔を存して並べるようにして前記足載せ部に載せた起立姿勢で該足載せ部上に搭乗可能に構成された倒立振子型車両の制御装置であって、
前記移動動作部の制御のための車両の動作モードとして、前記足載せ部上に乗員が搭乗しようとする時の過渡的な動作モードである搭乗行為用モードと、前記足載せ部上から乗員が降車しようとする時の過渡的な動作モードである降車行為用モードとのうちの少なくとも一方のモードから成る過渡期用モードを含み、該過渡期用モードを含む各動作モードにおいて前記移動動作部の移動動作を前記アクチュエータ装置を介して制御する移動動作部制御手段と、
前記足載せ部に乗員の各足が載せられているか否かに応じた出力を生成する足載せ検知手段とを備え、
前記移動動作部制御手段は、前記過渡期用モードでは、該過渡期用モードの開始時から終了時までの期間のうち、少なくとも前記足載せ検知手段の出力が、乗員の両足のうちの一方の足のみが前記足載せ部に載せられていることを示す出力となる片足載せ期間を含む期間において、前記足載せ部の過渡期用目標傾斜角度を前記足載せ検知手段の出力に応じて決定すると共に、その決定した過渡期用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部の移動動作を制御し、
少なくとも前記過渡期用モードでの前記片足載せ期間において前記移動動作部制御手段が決定する前記過渡期用目標傾斜角度は、前記足載せ検知手段の出力が、乗員の右足のみが前記足載せ部に載せられていることを示す出力である場合には、少なくとも前記足載せ部のうちの右足載せ部と該足載せ部の傾動中心との水平距離が、該足載せ部のうちの右足載せ部と左足載せ部とが水平方向に並列する状態での当該水平距離よりも相対的に小さくなる角度であり、前記足載せ検知手段の出力が、乗員の左足のみが前記足載せ部に載せられていることを示す出力である場合には、少なくとも前記足載せ部のうちの左足載せ部と該足載せ部の傾動中心との水平距離が、該足載せ部のうちの右足載せ部と左足載せ部とが水平方向に並列する状態での当該水平距離よりも相対的に小さくなる角度であることを特徴とする(第1発明)。
In order to achieve such an object, the control apparatus for an inverted pendulum type vehicle according to one aspect of the present invention can move in all directions including a first direction and a second direction orthogonal to each other on the floor surface. An actuator device for driving the moving operation unit; a base body on which the moving operation unit and the actuator device are assembled; and an axis around the first direction and an axis in the second direction. An occupant footrest portion that is tiltable with respect to the vertical direction around two axes, and the occupant arranges both feet in the left-right direction with an interval between them. A control device for an inverted pendulum type vehicle configured to be able to board on the footrest in a standing posture.
As the operation mode of the vehicle for controlling the moving operation unit, a mode for boarding action which is a transient operation mode when the occupant tries to board the footrest unit, and the occupant from above the footrest unit A transitional mode consisting of at least one mode of a mode for getting off which is a transient operation mode when attempting to get off, and in each operation mode including the mode for transitional period, A moving operation unit control means for controlling the moving operation via the actuator device;
A footrest detecting means for generating an output according to whether or not each foot of an occupant is placed on the footrest portion;
The moving operation unit control means, wherein in the transition period for the mode, of the period from the start to the end of the transition period for the mode, the output of at least the footrest detecting means, of the legs of the occupant In a period including a one-leg rest period that is an output indicating that only one leg is placed on the footrest, the transitional target inclination angle of the footrest is determined according to the output of the footrest detection means. Controlling the movement operation of the movement operation unit so as to bring the actual inclination angle of the footrest part closer to the determined target inclination angle for the transition period,
The target inclination angle for the transition period determined by the moving operation unit control means in at least the one leg rest period in the transition mode is such that the output of the foot rest detection means is such that only the right foot of the occupant is in the foot rest section. In the case of an output indicating that the footrest is placed, at least the horizontal distance between the right footrest portion of the footrest portion and the tilt center of the footrest portion is the right footrest portion of the footrest portion. It is an angle that is relatively smaller than the horizontal distance in a state where the left footrest part is parallel to the horizontal direction, and the output of the footrest detection means is that only the occupant's left foot is placed on the footrest part The horizontal distance between at least the left footrest portion of the footrest portion and the tilt center of the footrest portion is the right footrest portion and the left footrest portion of the footrest portion. In the state where the Characterized in that it is a relatively small angle than a horizontal distance (first invention).
なお、本発明において、前記移動動作部が、「第1の方向及び第2の方向を含む全方向に移動可能」ということは、該第1の方向及び第2の方向に直交する軸方向で見た場合における各瞬間での該移動動作部の速度ベクトルの向きが、前記アクチュエータ装置による移動動作部の駆動によって、上記軸方向の周りの任意の角度方向の向きを採り得るということを意味する。この場合、上記軸方向は、概ね、上下方向又は床面に垂直な方向である。また、本発明における「直交」は厳密な意味での直交であることは必須ではなく、本発明の本質を逸脱しない範囲で、厳密な意味での直交から若干のずれがあってもよい。 In the present invention, the fact that the movement operation unit is “movable in all directions including the first direction and the second direction” means that the movement direction is an axial direction orthogonal to the first direction and the second direction. The direction of the velocity vector of the moving operation unit at each moment when viewed means that the direction of an arbitrary angular direction around the axial direction can be taken by driving the moving operation unit by the actuator device. . In this case, the axial direction is generally a vertical direction or a direction perpendicular to the floor surface. Further, “orthogonal” in the present invention is not necessarily orthogonal in the strict sense, and may be slightly deviated from orthogonal in the strict meaning without departing from the essence of the present invention.
また、本発明において、「床」は、通常的な意味での床(屋内の床など)だけを意味するものではなく、屋外の地面もしくは路面をも含むものとして使用する。 Further, in the present invention, “floor” does not mean a floor in a normal sense (such as an indoor floor) but also includes an outdoor ground or road surface.
上記第1発明によれば、前記過渡期用モードでは、前記移動動作部制御手段は、該過渡期用モードの開始時から終了時までの期間のうち、少なくとも前記片足載せ期間を含む期間において、前記過渡期用目標傾斜角度を前記足載せ検知手段の出力に応じて決定すると共に、その決定した過渡期用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部の移動動作を制御する。このため、足載せ部の実際の傾斜角度が過渡期用目標傾斜角度に一致又はほぼ一致するような状態では、移動動作部の移動動作が発生し難くなる。 According to the first invention, the period and in the transition period for the mode, the moving operation unit control means, out of the period from the start to the end of the transition period for the mode, including at least the one foot placed period The transition period target inclination angle is determined according to the output of the footrest detection means, and the moving operation is performed so that the actual inclination angle of the footrest section is brought close to the determined transition period target inclination angle. Controls the movement of parts. For this reason, in a state in which the actual inclination angle of the footrest portion coincides with or substantially coincides with the transitional target inclination angle, the movement operation of the movement operation portion hardly occurs.
ここで、本願発明者の種々様々の検討によれば、搭乗行為あるいは降車行為における前記片足載せ期間において、乗員がその両足のうち、右足だけを足載せ部に載せている状態では、足載せ部のうちの右足載せ部が該足載せ部の傾動中心(傾動の支点)の直上(鉛直方向上方)もしくはほぼ直上に存することが、該搭乗行為あるいは降車行為を円滑に行う上で好ましい。また、前記片足載せ期間において、乗員がその両足のうち、左足だけを足載せ部に載せている状態では、足載せ部のうちの左足載せ部が該足載せ部の傾動中心の直上もしくはその近辺に存することが、該搭乗行為あるいは降車行為を円滑に行う上で好ましい。 Here, according to various studies by the inventors of the present application, in the state where the occupant is placing only the right foot of the both feet on the footrest during the one-leg rest period in the boarding action or the getting-off action, Of these, it is preferable that the right footrest portion is located immediately above (in the vertical direction) or substantially above the center of tilting (tilting fulcrum) of the footrest portion in order to smoothly perform the boarding action or the getting-off action. In addition, in the state where the occupant is placing only the left foot of the both feet on the foot rest during the one foot rest period, the left foot rest of the foot rest is directly above or near the tilt center of the foot rest. It is preferable that the boarding action or the getting-off action is performed smoothly.
これは、搭乗行為において、乗員が足載せ部に載せていない方の足(他方の足)を最終的に足載せ部に載せるられるまでの期間、あるいは、降車行為において、乗員が当該他方の足を床面に接地させるまでの期間において、乗員が、その重心点を足載せ部の傾動中心(傾動の支点)のほぼ直上の位置に保ち易いからである。 This is because during the boarding action, the period until the occupant who is not on the footrest part (the other leg) is finally placed on the footrest part, or during the dismounting action, This is because it is easy for the occupant to keep the center of gravity at a position almost immediately above the tilt center (tilt fulcrum) of the footrest during the period until the vehicle is in contact with the floor.
そこで、第1発明では、前記移動動作部制御手段は、少なくとも前記過渡期用モードでの前記片足載せ期間において、前記足載せ検知手段の出力が、乗員の右足のみが前記足載せ部に載せられていることを示す出力である場合(以降、右足載せ状態ということがある)には、少なくとも前記足載せ部のうちの右足載せ部と該足載せ部の傾動中心との水平距離が、該足載せ部のうちの右足載せ部と左足載せ部とが水平方向に並列する状態での当該水平距離よりも相対的に小さくなる角度を過渡期用目標傾斜角度として決定する。また、前記移動動作部制御手段は、少なくとも前記過渡期用モードでの前記片足載せ期間において、前記足載せ検知手段の出力が、乗員の左足のみが前記足載せ部に載せられていることを示す出力である場合(以降、右足載せ状態ということがある)には、少なくとも前記足載せ部のうちの左足載せ部と該足載せ部の傾動中心との水平距離が、該足載せ部のうちの右足載せ部と左足載せ部とが水平方向に並列する状態での当該水平距離よりも相対的に小さくなる角度を過渡期用目標傾斜角度として決定する。 Therefore, in the first aspect of the invention, the moving operation unit control means outputs at least the right foot of the occupant on the footrest portion during at least the one leg resting period in the transition mode. When the output indicates that the foot rests (hereinafter sometimes referred to as a right foot resting state), at least the horizontal distance between the right foot rest of the foot rest and the tilt center of the foot rest is the foot rest. An angle that is relatively smaller than the horizontal distance in a state where the right footrest portion and the left footrest portion of the placement portion are arranged in parallel in the horizontal direction is determined as the transitional target inclination angle. Further, the movement operation unit control means indicates that the output of the footrest detection means indicates that only the left foot of the occupant is placed on the footrest portion at least in the one footrest period in the transition mode. In the case of an output (hereinafter sometimes referred to as a right footrest state), at least the horizontal distance between the left footrest portion of the footrest portion and the tilting center of the footrest portion is equal to that of the footrest portion. An angle that is relatively smaller than the horizontal distance in a state where the right footrest portion and the left footrest portion are aligned in the horizontal direction is determined as the transitional target inclination angle.
このため、前記過渡期用モードでの前記片足載せ期間において、足載せ部の実際の傾斜角度を、上記の如く決定した過渡期用目標傾斜角度、すなわち、搭乗行為や降車行為を円滑に行い易い目標傾斜角度に一致又はほぼ一致させた状態で、移動動作部の移動動作が発生し難くなる。 For this reason, in the one-leg resting period in the transitional mode, the transitional target inclination angle determined as described above, that is, the actual inclination angle of the footrest part, that is, the boarding action and the getting-off action are easily performed. It is difficult for the movement operation of the movement operation unit to occur in a state where it matches or substantially matches the target inclination angle.
この結果、第1発明によれば、乗員が搭乗行為や降車行為を行い易くなるようにすることができる。 As a result, according to the first invention, it is possible to make it easier for the occupant to perform the boarding action and the getting-off action.
次に、本発明の他の態様の倒立振子型車両の制御装置は、前記の目的を達成するために、床面上を互いに直交する第1の方向及び第2の方向を含む全方向に移動可能な移動動作部と、該移動動作部を駆動するアクチュエータ装置と、該移動動作部及びアクチュエータ装置が組付けられた基体と、該基体に組み付けられ、前記第1の方向の軸周りと前記第2の方向の軸周りとの2軸周りで鉛直方向に対して傾動自在に設けられた乗員用の足載せ部とを備え、乗員がその両足を左右方向に間隔を存して並べるようにして前記足載せ部に載せた起立姿勢で該足載せ部上に搭乗可能に構成された倒立振子型車両の制御装置であって、
前記移動動作部の制御のための車両の動作モードとして、前記足載せ部上に乗員が搭乗しようとする時の過渡的な動作モードである搭乗行為用モードと、前記足載せ部上から乗員が降車しようとする時の過渡的な動作モードである降車行為用モードとのうちの少なくとも一方のモードから成る過渡期用モードを含み、該過渡期用モードを含む各動作モードにおいて前記移動動作部の移動動作を前記アクチュエータ装置を介して制御する移動動作部制御手段と、
前記足載せ部に乗員の各足が載せられているか否かに応じた出力を生成する足載せ検知手段とを備え、
前記移動動作部制御手段は、前記過渡期用モードでは、該過渡期用モードの開始時から終了時までの期間のうち、少なくとも前記足載せ検知手段の出力が、乗員の両足のうちの一方の足のみが前記足載せ部に載せられていることを示す出力となる片足載せ期間を含む期間において、前記足載せ部のうちの右足載せ部と左足載せ部との並列方向が水平方向から傾斜した方向となる過渡期用目標傾斜角度を前記足載せ検知手段の出力に応じて決定すると共に、その決定した過渡期用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部の移動動作を制御し、
少なくとも前記過渡期用モードでの前記片足載せ期間において前記移動動作部制御手段が決定する前記過渡期用目標傾斜角度は、前記足載せ検知手段の出力が、乗員の右足のみが前記足載せ部に載せられていることを示す出力である場合には、前記右足載せ部が左足載せ部よりも相対的に高い位置となる角度であり、乗員の左足のみが前記足載せ部に載せられていることを示す出力である場合には、前記左足載せ部が右足載せ部よりも相対的に高い位置となる角度であることを特徴とする(第2発明)。
Next, the inverted pendulum type vehicle control apparatus according to another aspect of the present invention moves in all directions including a first direction and a second direction orthogonal to each other on the floor surface in order to achieve the above-described object. Possible moving operation unit, an actuator device for driving the moving operation unit, a base body on which the moving operation unit and the actuator device are assembled, and an axis around the first direction and the first direction. An occupant's footrest provided so as to be tiltable with respect to the vertical direction around the two axes of the two directions, and the occupant arranges both feet in the left-right direction with an interval between them. A control device for an inverted pendulum type vehicle configured to be able to board on the footrest portion in an upright posture placed on the footrest portion,
As the operation mode of the vehicle for controlling the moving operation unit, a mode for boarding action which is a transient operation mode when the occupant tries to board the footrest unit, and the occupant from above the footrest unit A transitional mode consisting of at least one mode of a mode for getting off which is a transient operation mode when attempting to get off, and in each operation mode including the mode for transitional period, A moving operation unit control means for controlling the moving operation via the actuator device;
A footrest detecting means for generating an output according to whether or not each foot of an occupant is placed on the footrest portion;
The moving operation unit control means, wherein in the transition period for the mode, of the period from the start to the end of the transition period for the mode, the output of at least the footrest detecting means, of the legs of the occupant In a period including a one-leg rest period that is an output indicating that only one leg is resting on the foot rest, the parallel direction of the right foot rest and the left foot rest of the foot rest is from the horizontal direction. The transitional target inclination angle in the inclined direction is determined according to the output of the footrest detection means, and the actual inclination angle of the footrest portion is made closer to the determined transitional target inclination angle. Control the movement operation of the movement unit,
The target inclination angle for the transition period determined by the moving operation unit control means in at least the one leg rest period in the transition mode is such that the output of the foot rest detection means is such that only the right foot of the occupant is in the foot rest section. In the case of an output indicating that the vehicle is placed, the right footrest is at an angle that is relatively higher than the left footrest, and only the occupant's left foot is placed on the footrest. In the case of the output indicating the above, the left footrest portion is at an angle that is relatively higher than the right footrest portion (second invention).
上記第2発明によれば、第1発明と同様に、前記過渡期用モードでは、前記移動動作部制御手段は、該過渡期用モードの開始時から終了時までの期間のうち、少なくとも前記片足載せ期間を含む期間において、前記過渡期用目標傾斜角度を前記足載せ検知手段の出力に応じて決定すると共に、その決定した過渡期用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部の移動動作を制御する。このため、足載せ部の実際の傾斜角度が過渡期用目標傾斜角度に一致又はほぼ一致するような状態では、移動動作部の移動動作が発生し難くなる。 According to the second invention, as with the first invention, wherein in the transition period for the mode, the moving operation unit control means, out of the period from the start to the end of the transition period for the mode, at least In the period including the one foot rest period, the transitional period target inclination angle is determined according to the output of the footrest detection means, and the actual inclination angle of the footrest part is set to the determined transitional period target inclination angle. The moving operation of the moving operation unit is controlled so as to be close to each other. For this reason, in a state in which the actual inclination angle of the footrest portion coincides with or substantially coincides with the transitional target inclination angle, the movement operation of the movement operation portion hardly occurs.
ここで、前記した如く、搭乗行為において、乗員が足載せ部に載せていない方の足(他方の足)を最終的に足載せ部に載せるられるまでの期間、あるいは、降車行為において、乗員が当該他方の足を床面に接地させるまでの期間において、乗員が、その重心点を足載せ部の傾動中心(傾動の支点)のほぼ直上の位置に保ち易くすることが、搭乗行為あるいは降車行為を円滑に行う上で好ましい。 Here, as described above, in the boarding action, the occupant is in a period until the foot (the other leg) that is not on the footrest part is finally placed on the footrest part, or in the dismounting action. In the period until the other foot is brought into contact with the floor surface, it is easier for the occupant to keep its center of gravity at a position almost directly above the tilting center of the footrest (tilting fulcrum). It is preferable for carrying out smoothly.
そして、この好ましい形態は、例えば、次のような態様によって実現できる。 And this preferable form is realizable by the following aspects, for example.
すなわち、搭乗行為あるいは降車行為における前記片足載せ期間において、乗員がその両足のうち、右足だけを足載せ部に載せている状態では、足載せ部のうちの右足載せ部が左足載せ部よりも相対的に高い位置(鉛直方向での位置)となるように、該右足載せ部と左足載せ部との並列方向が水平方向に対して傾斜した方向となるようにする。また、前記片足載せ期間において、乗員がその両足のうち、左足だけを足載せ部に載せている状態では、足載せ部のうちの左足載せ部が右足載せ部よりも相対的に高い位置(鉛直方向での位置)となるように、該右足載せ部と左足載せ部との並列方向が水平方向に対して傾斜した方向となるようにする。 That is, in the state where the one foot is placed in the boarding action or the getting off action, in the state where the occupant is placing only the right foot on the foot rest portion of the both feet, the right foot rest portion of the foot rest portion is more relative than the left foot rest portion. Therefore, the parallel direction of the right footrest and the left footrest is set to be inclined with respect to the horizontal direction so that the position is vertically high (position in the vertical direction). Further, in the state where the occupant is placing only the left foot of the both feet on the foot rest during the one foot rest period, the left foot rest of the foot rest is relatively higher than the right foot rest (vertical The parallel direction of the right footrest portion and the left footrest portion is inclined with respect to the horizontal direction.
なお、右足載せ部と左足載せ部との並列方向が水平方向となる状態は、より詳しくは、右足載せ部の、右足の底面との接触面と、左足載せ部の、左足の底面との接触面とが同一もしくはほぼ同一の高さ位置になる状態を意味する。 More specifically, the state in which the parallel direction of the right foot rest and the left foot rest is in the horizontal direction is more specifically, the contact surface of the right foot rest with the bottom surface of the right foot and the contact of the left foot rest with the bottom surface of the left foot. This means that the surface is at the same or almost the same height.
そこで、第2発明では、前記移動動作部制御手段は、少なくとも前記過渡期用モードでの前記片足載せ期間において、前記足載せ検知手段の出力が、乗員の右足のみが前記足載せ部に載せられていることを示す出力となる前記右足載せ状態では、前記右足載せ部が左足載せ部よりも相対的に高い位置となる足載せ部の角度を過渡期用目標傾斜角度として決定する。また、前記移動動作部制御手段は、少なくとも前記過渡期用モードでの前記片足載せ期間において、前記足載せ検知手段の出力が、乗員の左足のみが前記足載せ部に載せられていることを示す出力となる前記右足載せ状態では、前記左足載せ部が右足載せ部よりも相対的に高い位置となる足載せ部の角度を過渡期用目標傾斜角度として決定する。 Therefore, in the second aspect of the invention, the movement operation unit control means outputs the output of the footrest detection means so that only the right foot of the occupant is placed on the footrest portion at least in the one footrest period in the transition mode. In the right footrest state, which is an output indicating that the right footrest is in an output, the angle of the footrest portion at which the right footrest portion is relatively higher than the left footrest portion is determined as the transition target inclination angle. Further, the movement operation unit control means indicates that the output of the footrest detection means indicates that only the left foot of the occupant is placed on the footrest portion at least in the one footrest period in the transition mode. In the right footrest state that is an output, the angle of the footrest portion at which the left footrest portion is relatively higher than the right footrest portion is determined as the transitional target inclination angle.
このため、前記過渡期用モードでの前記片足載せ期間において、足載せ部の実際の傾斜角度を、上記の如く決定した過渡期用目標傾斜角度、すなわち、搭乗行為や降車行為を円滑に行い易い目標傾斜角度に一致又はほぼ一致させた状態で、移動動作部の移動動作が発生し難くなる。 For this reason, in the one-leg resting period in the transitional mode, the transitional target inclination angle determined as described above, that is, the actual inclination angle of the footrest part, that is, the boarding action and the getting-off action are easily performed. It is difficult for the movement operation of the movement operation unit to occur in a state where it matches or substantially matches the target inclination angle.
この結果、第2発明によれば、乗員が搭乗行為や降車行為を行い易くなるようにすることができる。また、特に、過渡期用モードが前記搭乗行為用モードを含む場合には、搭乗行為での片足載せ期間において、これから足載せ部に載せようとする他方の足側の足載せ部の高さが相対的に低い高さとなるので、当該他方の足を、それに対応する足載せ部に素早く載せることが容易になる。 As a result, according to the second invention, it is possible to make it easier for the occupant to perform the boarding action and the getting-off action. In particular, when the transitional mode includes the boarding action mode, the height of the footrest part on the other foot side to be placed on the footrest part from now on during the one leg resting period in the boarding action Since the height is relatively low, it is easy to quickly place the other foot on the corresponding footrest.
なお、第1発明及び第2発明において、前記片足載せ期間を含む期間は、過渡期用モードの開始時から終了時までの期間のうち、例えば、乗員の一方の足のみが足載せ部に載せられている状態が一時的に解消された状態での期間を含んでいてもよい。また、過渡期用モードの開始時や終了時は、自動的に決定されてもよいが、それらのタイミングを乗員のスイッチ操作等に応じて人為的に決定し得るようにしてもよい。 In the first and second aspects of the invention, the foot placed period including the period of time from the start of the transition period for mode until the end, for example, legs only one leg of the passenger footrest It may include a period in a state where the state placed on is temporarily eliminated. Moreover, the start and end of the transition period for the mode may be automatically determined, or may be adapted to artificially determined according to their timing to the occupant of the switch operation or the like.
また、前記過渡期用目標傾斜角度は、前記片足載せ期間を含む期間において、一定値(固定値)に決定してもよいが、例えば、該期間の開始直後や終了直後に徐々に変化させるように決定してもよい。 Further, the transitional target inclination angle may be determined to be a constant value (fixed value) during the period including the one leg resting period. For example, the transitional target inclination angle may be gradually changed immediately after the start or end of the period. You may decide to.
また、第1発明及び第2発明において、例えば、前記第1の方向を足載せ部上に搭乗した乗員の前後方向、前記第2の方向を足載せ部上に搭乗した乗員の左右方向(前記右足載せ部と左足載せ部との並列方向)とした場合、前記片足載せ期間を含む期間において、前記過渡期用目標傾斜角度のうちの第2の方向の軸周りの成分については、前記右足載せ状態と左足載せ状態とで、互いに異なる必要はなく、同一であってもよい。換言すれば、右足載せ部と左足載せ部との並列方向を、前記右足載せ状態と左足載せ状態とで、互いに逆側に傾斜させる上では、前記過渡期用目標傾斜角度のうちの第1の方向(乗員の前後方向)の軸周りの成分のみを前記右足載せ状態と左足載せ状態とで互いに異なるようにしてもよい。 In the first and second aspects of the invention, for example, the front-rear direction of an occupant riding on the footrest in the first direction, and the left-right direction of the occupant riding on the footrest in the second direction (see above) In the period including the one leg resting period, a component around the axis in the second direction of the target inclination angle for the transition period in the period including the one leg resting period is used. The state and the left foot-mounted state need not be different from each other and may be the same. In other words, in order to incline the parallel direction of the right footrest portion and the left footrest portion in the right footrest state and the left footrest state in mutually opposite directions, the first of the transitional target inclination angles is the first. Only the components around the axis in the direction (the front-rear direction of the occupant) may be different from each other between the right footrest state and the left footrest state.
前記第2発明においては、前記動作モードが、前記搭乗行為用モードと、乗員が前記足載せ部上に搭乗した状態での動作モードである搭乗中モードとを含む場合には、前記移動動作部制御手段は、前記搭乗中モードでは、少なくとも前記足載せ部のうちの右足載せ部と左足載せ部との並列方向が水平方向となる所定値の搭乗中用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部を制御し、前記搭乗行為用モードにおいて、前記足載せ検知手段の出力が、乗員の一方の足のみが前記足載せ部に載せられていることを示す出力から、乗員の両足が前記足載せ部に載せられていることを示す出力に変化した場合に、前記足載せ部の目標傾斜角度を前記過渡期用目標傾斜角度から前記搭乗中用目標傾斜角度に変化させるように決定し、その決定した目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部を制御することが好ましい(第3発明)。 In the second aspect of the invention, when the operation mode includes the mode for boarding action and the on-boarding mode which is an operation mode in a state where an occupant is on the footrest, In the on-boarding mode, the control means is configured to set the actual position of the footrest portion to a predetermined target inclination angle during boarding in which the parallel direction of at least the right footrest portion and the left footrest portion of the footrest portion is a horizontal direction. The movement operation unit is controlled so as to approach the inclination angle of the vehicle, and in the riding action mode, the output of the footrest detection means indicates that only one foot of the occupant is placed on the footrest portion. When the output changes to an output indicating that both feet of the occupant are placed on the footrest, the target inclination angle of the footrest is changed from the target inclination angle for the transition period to the target inclination angle for the on-boarding. To change And sea urchin decision, it is preferable to control the moving operation part to approach the actual inclination angle of the footrest to the desired tilt angle and the determined (third invention).
この第3発明によれば、前記搭乗行為用モードにおいて、乗員の一方の足のみが前記足載せ部に載せられている状態から、乗員の両足が前記足載せ部に載せられている状態に変化した場合に、前記足載せ部の目標傾斜角度を前記過渡期用目標傾斜角度から前記搭乗中用目標傾斜角度に変化させるように決定するので、前記搭乗行為用モードでの移動動作部の制御から、搭乗中モードでの移動動作部の制御への移行を円滑に行うことができる。 According to the third aspect of the present invention, in the boarding action mode, the state changes from a state in which only one occupant's foot is placed on the footrest portion to a state in which both occupant feet are placed on the footrest portion. In this case, since the target inclination angle of the footrest portion is determined to be changed from the target inclination angle for the transition period to the target inclination angle for boarding, from the control of the movement operation unit in the mode for boarding action Thus, the shift to the control of the moving operation unit in the on-board mode can be performed smoothly.
なお、前記足載せ部の目標傾斜角度を前記過渡期用目標傾斜角度から前記搭乗中用目標傾斜角度に変化させる場合には、該目標傾斜角度の変化を徐々に行なうことが望ましい。 When the target inclination angle of the footrest is changed from the transitional target inclination angle to the on-boarding target inclination angle, it is desirable to gradually change the target inclination angle.
また、前記搭乗中用目標傾斜角度としては、例えば、車両と乗員とを併せた系のうち、前記足載せ部と一体に傾動する部分(乗員を含む)の全体の重心点が該足載せ部の傾動支点の鉛直方向上方に位置することとなる該足載せ部の傾斜角度を採用することが好適である。 In addition, as the target inclination angle for boarding, for example, the center of gravity of the entire portion (including the occupant) that tilts integrally with the footrest portion in the combined system of the vehicle and the occupant is the footrest portion. It is preferable to adopt an inclination angle of the footrest portion that is positioned vertically above the tilting fulcrum of the foot.
また、前記第2発明又は第3発明においては、前記動作モードが、前記降車行為用モードと、乗員が車両から離脱した状態での動作モードである非搭乗中モードとを含む場合には、前記移動動作部制御手段は、前記非搭乗中モードでは、少なくとも前記足載せ部のうちの右足載せ部と左足載せ部との並列方向が水平方向となる非搭乗中用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部を制御し、前記降車行為用モードにおいて、前記足載せ検知手段の出力が、乗員の一方の足のみが前記足載せ部に載せられていることを示す出力から、乗員の両足とも前記足載せ部に載せられていないことを示す出力に変化した場合に、前記足載せ部の目標傾斜角度を前記過渡期用目標傾斜角度から前記非搭乗中用目標傾斜角度に変化させるように決定し、その決定した目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部を制御することが好ましい(第4発明)。 In the second invention or the third invention, when the operation mode includes the mode for getting off the vehicle and the non-boarding mode that is an operation mode in a state in which the occupant has left the vehicle, In the non-boarding mode, the movement operation unit control means is configured such that at least the right footrest portion and the left footrest portion of the footrest portion have a horizontal direction in which the parallel direction of the right footrest portion and the left footrest portion is the non-boarding target inclination angle. The moving operation unit is controlled so as to approach the actual inclination angle of the vehicle, and in the dismounting action mode, the output of the footrest detection means is such that only one foot of the occupant is placed on the footrest portion. When the output changes to an output indicating that both feet of the occupant are not placed on the footrest, the target inclination angle of the footrest is changed from the target inclination angle for the transition period to the non-boarding Target tilt angle To determine to change, it is preferable to control the moving operation part to approach the actual inclination angle of the footrest to the desired tilt angle and the determined (fourth invention).
この第4発明によれば、前記降車行為用モードにおいて、乗員の一方の足のみが前記足載せ部に載せられている状態から、乗員の両足とも前記足載せ部に載せられていない状態(乗員が降車した状態)に変化した場合に、前記足載せ部の目標傾斜角度を前記過渡期用目標傾斜角度から前記非搭乗中用目標傾斜角度に変化させるように決定するので、前記降車行為用モードでの移動動作部の制御から、非搭乗中モードでの移動動作部の制御への移行を円滑に行うことができる。 According to the fourth aspect of the present invention, in the dismounting action mode, a state in which only one occupant's foot is placed on the footrest is not placed on the footrest (both passengers). In the state of getting off), the target inclination angle of the footrest portion is determined to be changed from the target inclination angle for the transition period to the target inclination angle for non-boarding. It is possible to smoothly perform the transition from the control of the moving operation unit at the control to the control of the moving operation unit in the non-boarding mode.
なお、前記足載せ部の目標傾斜角度を前記過渡期用目標傾斜角度から前記非搭乗中用目標傾斜角度に変化させる場合には、該目標傾斜角度を素早く変化させることが望ましい。 In addition, when changing the target inclination angle of the footrest from the transitional target inclination angle to the non-boarding target inclination angle, it is desirable to change the target inclination angle quickly.
また、前記非搭乗中用目標傾斜角度としては、例えば、車両単体のうち、前記足載せ部と一体に傾動する部分の全体の重心点が該足載せ部の傾動支点の鉛直方向上方に位置することとなる該足載せ部の傾斜角度を採用することが好適である。 Further, as the non-boarding target inclination angle, for example, the center of gravity of the entire portion of the vehicle that tilts integrally with the footrest portion is positioned above the tilting fulcrum of the footrest portion in the vertical direction. It is preferable to adopt the inclination angle of the footrest portion.
補足すると、前記各動作モードでの移動動作部制御手段による前記移動動作部の移動動作部の制御形態の一例としては、例えば、次のような形態が挙げられる。すなわち、移動動作部制御手段は、例えば、前記移動動作部に付与する駆動力を規定する制御用操作量を、少なくとも前記搭乗部の実際の傾斜角度の計測値と目標傾斜角度(前記過渡期用目標傾斜角度又は搭乗中用目標傾斜角度又は非搭乗中用目標傾斜角度)との偏差である傾斜偏差に応じて、該傾斜偏差を“0”に近づけるように決定する。あるいは、移動動作部制御手段は、例えば、該傾斜偏差を“0”に近づけることに加えて、車両の所定の代表点の移動速度の計測値とを“0”に近づけるように、少なくとも該傾斜偏差と速度偏差と応じて前記制御用操作量を決定する。この場合、上記代表点としては、例えば、前記足載せ部と一体に傾動可能な部位の点(重心点など)を用いることができる。なお、前記傾斜角度の計測値を用いる場合には、前記足載せ部の実際の傾斜角度に応じた出力を生成する傾斜角度計測手段を備えておく。同様に、前記代表点の移動速度の計測値を用いる場合には、前記代表点の実際の移動速度に応じた出力を生成する代表点速度計測手段を備えておく。 Supplementally, examples of the control mode of the moving operation unit of the moving operation unit by the moving operation unit control means in each operation mode include the following modes. That is, the moving operation unit control means, for example, sets the control operation amount that defines the driving force applied to the moving operation unit, at least the measured value of the actual inclination angle of the riding unit and the target inclination angle (for the transient period). The inclination deviation is determined to be close to “0” according to the inclination deviation that is a deviation from the target inclination angle, the target inclination angle for boarding or the target inclination angle for non-boarding). Alternatively, the movement operation unit control means, for example, in addition to bringing the inclination deviation closer to “0”, at least the inclination so as to bring the measured value of the moving speed of a predetermined representative point of the vehicle closer to “0”. The control operation amount is determined according to the deviation and the speed deviation. In this case, as the representative point, for example, a point (such as a center of gravity) that can be tilted integrally with the footrest portion can be used. In addition, when using the measured value of the said inclination angle, the inclination angle measurement means which produces | generates the output according to the actual inclination angle of the said footrest part is provided. Similarly, when the measured value of the moving speed of the representative point is used, representative point speed measuring means for generating an output corresponding to the actual moving speed of the representative point is provided.
本発明の一実施形態を以下に説明する。まず、図1〜図6を参照して、本実施形態における倒立振子型車両の構造を説明する。 One embodiment of the present invention will be described below. First, the structure of an inverted pendulum type vehicle in the present embodiment will be described with reference to FIGS.
図1及び図2に示すように、本実施形態における倒立振子型車両1は、乗員(運転者)の搭乗部3と、床面に接地しながら該床面上を全方向(前後方向及び左右方向を含む2次元的な全方向)に移動可能な移動動作部5と、この移動動作部5を駆動する動力を該移動動作部5に付与するアクチュエータ装置7と、これらの搭乗部3、移動動作部5及びアクチュエータ装置7が組付けられた基体9とを備える。
As shown in FIGS. 1 and 2, the inverted
ここで、本実施形態の説明では、「前後方向」、「左右方向」は、それぞれ、搭乗部3に標準的な姿勢で搭乗した乗員の上体の前後方向、左右方向に一致もしくはほぼ一致する方向を意味する。なお、「標準的な姿勢」は、搭乗部3に関して設計的に想定されている姿勢であり、乗員の上体の体幹軸を概ね上下方向に向け、且つ、上体を捻ったりしていない姿勢である。
Here, in the description of the present embodiment, “front-rear direction” and “left-right direction” respectively match or substantially coincide with the front-rear direction and the left-right direction of the upper body of the occupant who has boarded the
この場合、図1においては、「前後方向」、「左右方向」はそれぞれ、紙面に垂直な方向、紙面の左右方向であり、図2においては、「前後方向」、「左右方向」はそれぞれ、紙面の左右方向、紙面に垂直な方向である。また、本実施形態の説明では、参照符号に付する添え字「R」,「L」は、それぞれ車両1の右側、左側に対応するものという意味で使用する。
In this case, in FIG. 1, the “front-rear direction” and the “left-right direction” are the direction perpendicular to the paper surface and the left-right direction of the paper surface, respectively. In FIG. It is the left-right direction of the paper surface and the direction perpendicular to the paper surface. In the description of the present embodiment, the suffixes “R” and “L” attached to the reference numerals are used to mean the right side and the left side of the
基体9は、移動動作部5及びアクチュエータ装置7とが組付けられた下部フレーム11と、この下部フレーム11の上端から上方に延設された支柱フレーム13とを備える。
The
下部フレーム11は、左右方向に間隔を存して二股状に対向するように配置された一対のカバー部材21R,21Lを備える。これらのカバー部材21R,21Lの上端部(二股の分岐部分)は、前後方向の軸心を有するヒンジ軸23を介して連結され、カバー部材21R,21Lの一方が他方に対して相対的にヒンジ軸23の周りに揺動可能となっている。この場合、カバー部材21R,21Lは、図示を省略するバネによって、カバー部材21R,21Lの下端部側(二股の先端側)が狭まる方向に付勢されている。
The
この下部フレーム11には、乗員の搭乗部3としての足載せ部が装着されている。この足載せ部3は、乗員の右足、左足をそれぞれ載せる一対のステップ3R,3Lから構成される。右側のステップ3Rは、カバー部材3Rの外側面部から右向きに張り出すように突設され、左側のステップ3Lは、カバー部材21Lの外側面部から左向きに張り出すように突設されている。本実施形態の倒立振子型車両1(以降、単に車両1という)では、乗員は、その両足をステップ3R,3Lに載せて、起立した姿勢で車両1に搭乗するようになっている。この搭乗状態では、乗員の両足は、その間に車輪体5が介在するようにして、乗員の左右方向に間隔を存して並ぶ。なお、ステップ3R,3Lはそれぞれ、本発明における右足載せ部、左足載せ部に相当する。
The
また、支柱フレーム13の上部には、足載せ部3上に起立した乗員がその手で把持する把持部15が固定されている。この把持部15は、支柱フレーム13の上部から右向きに張り出すように突設された把持部15Rと、左向きに張り出すように突設された把持部15Lとから構成される。
In addition, a
移動動作部5及びアクチュエータ装置7は、下部フレーム11のカバー部材21R,21Lの間に配置されている。これらの移動動作部5及びアクチュエータ装置7の構造を図3〜図6を参照して説明する。
The moving
なお、本実施形態で例示する移動動作部5及びアクチュエータ装置7は、例えば前記特許文献2の図1に開示されているものと同じ構造のものである。従って、本実施形態の説明においては、移動動作部5及びアクチュエータ装置7の構成に関して、前記特許文献2に記載された事項については、簡略的な説明に留める。
The moving
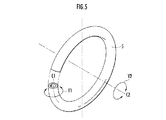
本実施形態では、移動動作部5は、ゴム状弾性材により円環状に形成された車輪体であり、ほぼ円形の横断面形状を有する。この移動動作部5(以降、車輪体5という)は、その弾性変形によって、図5及び図6の矢印Y1で示す如く、円形の横断面の中心C1(より詳しくは、円形の横断面中心C1を通って、車輪体5の軸心と同心となる円周線)の周りに回転可能となっている。
In the present embodiment, the moving
この車輪体5は、その軸心C2(車輪体5全体の直径方向に直交する軸心C2)を左右方向に向けた状態で、カバー部材21R,21Lの間に配置され、該車輪体5の外周面の下端部にて床面に接地する。
The
そして、車輪体5は、アクチュエータ装置7による駆動(詳細は後述する)によって、図5の矢印Y2で示す如く車輪体5の軸心C2の周りに回転する動作(床面上を輪転する動作)と、車輪体5の横断面中心C1の周りに回転する動作とを行なうことが可能である。その結果、車輪体5は、それらの回転動作の複合動作によって、床面上を全方向に移動することが可能となっている。
The
アクチュエータ装置7は、車輪体5と右側のカバー部材21Rとの間に介装される回転部材27R及びフリーローラ29Rと、車輪体5と左側のカバー部材17Lとの間に介装される回転部材27L及びフリーローラ29Lと、回転部材27R及びフリーローラ29Rの上方に配置されたアクチュエータとしての電動モータ31Rと、回転部材27L及びフリーローラ29Lの上方に配置されたアクチュエータとしての電動モータ31Lとを備える。
The
電動モータ31R,31Lは、それぞれのハウジングがカバー部材21R,21Lに各々取付けられている。なお、図示は省略するが、電動モータ31R,31Lの電源(蓄電器)は、支柱フレーム13等、基体9の適所に搭載されている。
The
回転部材27Rは、左右方向の軸心を有する支軸33Rを介してカバー部材21Rに回転可能に支持されている。同様に、回転部材27Lは、左右方向の軸心を有する支軸33Lを介してカバー部材21Lに回転可能に支持されている。この場合、回転部材27Rの回転軸心(支軸33Rの軸心)と、回転部材27Lの回転軸心(支軸33Lの軸心)とは同軸心である。
The rotating
回転部材27R,27Lは、それぞれ電動モータ31R,31Lの出力軸に、減速機としての機能を含む動力伝達機構を介して接続されており、電動モータ31R,31Lからそれぞれ伝達される動力(トルク)によって回転駆動される。各動力伝達機構は、例えばプーリ・ベルト式のものである。すなわち、図3に示す如く、回転部材27Rは、プーリ35Rとベルト37Rとを介して電動モータ31Rの出力軸に接続されている。同様に、回転部材27Lは、プーリ35Lとベルト37Lとを介して電動モータ31Lの出力軸に接続されている。
The rotating
なお、上記動力伝達機構は、例えば、スプロケットとリンクチェーンとにより構成されるもの、あるいは、複数のギヤにより構成されるものであってもよい。また、例えば、電動モータ31R,31Lを、それぞれの出力軸が各回転部材27R,27Lと同軸心になるように各回転部材27R,27Lに対向させて配置し、電動モータ31R,31Lのそれぞれの出力軸を回転部材27R,27Lに各々、減速機(遊星歯車装置等)を介して連結するようにしてもよい。
The power transmission mechanism may be constituted by, for example, a sprocket and a link chain, or may be constituted by a plurality of gears. In addition, for example, the
各回転部材27R,27Lは、車輪体5側に向かって縮径する円錐台と同様の形状に形成されており、その外周面がテーパ外周面39R,39Lとなっている。
Each rotating
回転部材27Rのテーパ外周面39Rの周囲には、回転部材27Rと同心の円周上に等間隔で並ぶようにして、複数のフリーローラ29Rが配列されている。そして、これらのフリーローラ29Rは、それぞれ、ブラケット41Rを介してにテーパ外周面39Rに取付けられ、該ブラケット41Rに回転自在に支承されている。
A plurality of
同様に、回転部材27Lのテーパ外周面39Lの周囲には、回転部材27Lと同心の円周上に等間隔で並ぶようにして、複数(フリーローラ29Rと同数)のフリーローラ29Lが配列されている。そして、これらのフリーローラ29Lは、それぞれ、ブラケット41Lを介してにテーパ外周面39Lに取付けられ、該ブラケット41Lに回転自在に支承されている。
Similarly, a plurality (the same number as the
前記車輪体5は、回転部材27R側のフリーローラ29Rと、回転部材27L側のフリーローラ29Lとの間に挟まれるようにして、回転部材27R,27Lと同軸心に配置されている。
The
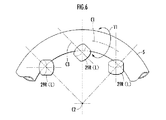
この場合、図1及び図6に示すように、各フリーローラ29R,29Lは、その軸心C3が車輪体5の軸心C2に対して傾斜すると共に、車輪体5の直径方向(車輪体5をその軸心C2の方向で見たときに、該軸心C2と各フリーローラ29R,29Lとを結ぶ径方向)に対して傾斜する姿勢で配置されている。そして、このような姿勢で、各フリーローラ29R,29Lのそれぞれの外周面が車輪体5の内周面に斜め方向に圧接されている。
In this case, as shown in FIGS. 1 and 6, each of the free rollers 29 </ b> R and 29 </ b> L has the axis C <b> 3 inclined with respect to the axis C <b> 2 of the
より一般的に言えば、右側のフリーローラ29Rは、回転部材27Rが軸心C2の周りに回転駆動されたときに、車輪体5との接触面で、軸心C2周りの方向の摩擦力成分(車輪体5の内周の接線方向の摩擦力成分)と、車輪体5の前記横断面中心C1の周り方向の摩擦力成分(円形の横断面の接線方向の摩擦力成分)とを車輪体5に作用させ得るような姿勢で、車輪体5の内周面に圧接されている。左側のフリーローラ29Lについても同様である。
More generally speaking, the
この場合、前記したように、カバー部材21R,21Lは、図示しないバネによって、カバー部材21R,21Lの下端部側(二股の先端側)が狭まる方向に付勢されている。このため、この付勢力によって、右側のフリーローラ29Rと左側のフリーローラ29Lとの間に車輪体5が挟持されると共に、車輪体5に対する各フリーローラ29R,29Lの圧接状態(より詳しくはフリーローラ29R,29Lと車輪体5との間で摩擦力が作用し得る圧接状態)が維持される。
In this case, as described above, the
以上説明した構造を有する車両1においては、電動モータ31R,31Lによりそれぞれ、回転部材27R,27Lを同方向に等速度で回転駆動した場合には、車輪体5が回転部材27R,27Lと同方向に軸心C2の周りに回転することとなる。これにより、車輪体5が床面上を前後方向に輪転して、車両1の全体が前後方向に移動することとなる。なお、この場合は、車輪体5は、その横断面中心C1の周りには回転しない。
In the
また、例えば、回転部材27R,27Lを互いに逆方向に同じ大きさの速度で回転駆動した場合には、車輪体5は、その横断面中心C1の周りに回転することとなる。これにより、車輪体4がその軸心C2の方向(すなわち左右方向)に移動し、ひいては、車両1の全体が左右方向に移動することとなる。なお、この場合は、車輪体5は、その軸心C2の周りには回転しない。
Further, for example, when the
さらに、回転部材27R,27Lを、互いに異なる速度(方向を含めた速度)で、同方向又は逆方向に回転駆動した場合には、車輪体5は、その軸心C2の周りに回転すると同時に、その横断面中心C1の周りに回転することとなる。
Furthermore, when the
この時、これらの回転動作の複合動作(合成動作)によって、前後方向及び左右方向に対して傾斜した方向に車輪体5が移動し、ひいては、車両1の全体が車輪体5と同方向に移動することとなる。この場合の車輪体5の移動方向は、回転部材27R,27Lの回転方向を含めた回転速度(回転方向に応じて極性が定義された回転速度ベクトル)の差に依存して変化するものとなる。
At this time, the
以上のように車輪体5の移動動作が行なわれるので、電動モータ31R,31Lのそれぞれの回転速度(回転方向を含む)を制御し、ひいては回転部材27R,27Lの回転速度を制御することによって、車両1の移動速度及び移動方向を制御できることとなる。
Since the moving operation of the
なお、足載せ部3及び基体9は、車輪体5の軸心C2を支点として、左右方向の軸心C2周りに傾動自在となっていると共に、車輪体5の接地面(下端面)を支点として、前後方向の軸周りに該車輪体5と共に傾動自在となっている。
The
次に、本実施形態の車両1の動作制御のための構成を説明する。なお、以降の説明では、図1及び図2に示すように、前後方向の水平軸をX軸、左右方向の水平軸をY軸、鉛直方向をZ軸とするXYZ座標系を想定し、前後方向、左右方向をそれぞれX軸方向、Y軸方向と言うことがある。
Next, the structure for operation control of the
まず、車両1の概略的な動作制御を説明すると、本実施形態では、基本的には、足載せ部3(ステップ3R,3L)上に起立姿勢で搭乗してグリップ15R,15Lを把持した乗員がその上体を傾けた場合(詳しくは、乗員と車両1とを合わせた全体の重心点の位置(水平面に投影した位置)を動かすように上体を傾けた場合)に、該上体を傾けた側に基体9が足載せ部3と共に傾動する。そして、この時、基体9が傾いた側に車両1が移動するように、車輪体5の移動動作が制御される。例えば、乗員が上体を前傾させ、ひいては、基体9を足載せ部3と共に前傾させると、車両1が前方に移動するように、車輪体5の移動動作が制御される。
First, schematic operation control of the
すなわち、本実施形態では、乗員が上体を動かし、ひいては、足載せ部3と共に基体9を傾動させるという動作が、車両1に対する1つの基本的な操縦操作(車両1の動作要求)とされ、その操縦操作に応じて車輪体5の移動動作がアクチュエータ装置7を介して制御される。
That is, in this embodiment, an operation in which the occupant moves the upper body and, as a result, tilts the
ここで、本実施形態の車両1は、その全体の接地面としての車輪体5の接地面が、車両1とこれに搭乗する乗員との全体を床面に投影した領域に比して面積が小さい単一の局所領域となり、その単一の局所領域だけに床反力が作用する。このため、基体9が傾倒しないようにするためには、乗員及び車両1の全体の重心点が車輪体5の接地面のほぼ真上に位置するように、車輪体5を動かす必要がある。
Here, in the
そこで、本実施形態では、乗員及び車両1の全体の重心点が、車輪体5の中心点(軸心C2上の中心点)のほぼ真上に位置する状態(より正確には当該重心点が車輪体5の接地面のほぼ真上に位置する状態)での基体9の姿勢を目標姿勢とし、基本的には、基体9の実際の姿勢を目標姿勢に収束させるように、車輪体5の移動動作が制御される。
Therefore, in the present embodiment, the center of gravity of the entire occupant and
さらに、車両1に乗員が搭乗していない状態では、車両1の単体の重心点が、車輪体5の中心点(軸心C2上の中心点)のほぼ真上に位置する状態(当該重心点が車輪体5の接地面のほぼ真上に位置する状態)での基体9の姿勢を目標姿勢とし、該基体9の実際の姿勢を目標姿勢に収束させ、ひいては、基体9が傾倒することなく車両1が自立するように、車輪体5の移動動作が制御される。
Further, in a state where no occupant is on board the
また、車両1に乗員が搭乗している状態と搭乗していない状態とのいずれの状態においても、基体9の実際の姿勢の目標姿勢からずれが大きいほど、車両1の移動速度が速くなると共に、基体9の実際の姿勢の目標姿勢に一致する状態では、車両1の移動が停止するように車輪体5の移動動作が制御される。
In addition, in both the state where the occupant is on board the
また、乗員が車両1に搭乗しようとする時、あるいは、車両1から降車しようとする時には、その搭乗行為あるいは降車行為を乗員が容易に行い得るように車輪体5の移動動作が制御される。
Further, when the occupant tries to board the
補足すると、「姿勢」は空間的な向きを意味する。本実施形態では、基体9が足載せ部3と共に傾動することで、基体9や足載せ部3の姿勢が変化する。また、本実施形態では、基体9と足載せ部3とは一体的に傾動するので、基体9の姿勢をその目標姿勢に収束させるということは、足載せ部3の姿勢を該足載せ部3に対応する目標姿勢(基体9の姿勢が基体9の目標姿勢に一致する状態での足載せ部3の姿勢)に収束させるということと等価である。
Supplementally, “posture” means a spatial orientation. In the present embodiment, the
本実施形態では、以上の如き車両1の動作制御を行なうために、図1及び図2に示すように、マイクロコンピュータや電動モータ31R,31Lのドライブ回路ユニットなどを含む電子回路ユニットにより構成された制御ユニット50と、基体9の姿勢(又は足載せ部3の姿勢)に関する状態量として、基体9の所定の部位の鉛直方向(重力方向)に対する傾斜角度θb及びその変化速度(=dθb/dt)を計測するための傾斜センサ52と、足載せ部3のステップ3R,3Lに乗員が足を載せているか否かを検知するための荷重センサ54R,54Lと、電動モータ31R,31Lのそれぞれの出力軸の回転角度及び回転角速度を検出するための角度センサとしてのロータリエンコーダ56R,56Lと、乗員が車両1に搭乗しようとする時、又は車両1から降車しようとする時にその旨を制御ユニット50に認識させるための搭乗/降車用操作子58とがそれぞれ、車両1の適所に搭載されている。
In the present embodiment, in order to control the operation of the
この場合、制御ユニット50及び傾斜センサ52は、例えば、基体9の支柱フレーム13の内部に収容された状態で該支柱フレーム13に取付けられている。また、荷重センサ54R,54Lはそれぞれ、ステップ3R,3Lに内蔵されている。また、ロータリエンコーダ56R,56Lは、それぞれ、電動モータ31R,31Lと一体に設けられている。なお、ロータリエンコーダ56R,56Lは、それぞれ、回転部材27R,27Lに装着してもよい。
In this case, the
上記傾斜センサ52は、より詳しくは、加速度センサとジャイロセンサ等のレートセンサ(角速度センサ)とから構成され、これらのセンサの検出信号を制御ユニット50に出力する。そして、制御ユニット50が、傾斜センサ52の加速度センサ及びレートセンサの出力を基に、所定の計測演算処理(これは公知の演算処理でよい)を実行することによって、傾斜センサ52を搭載した部位(本実施形態では支柱フレーム13)の、鉛直方向に対する傾斜角度θbの計測値とその変化速度(微分値)である傾斜角速度θbdotの計測値とを算出する。
More specifically, the
この場合、計測する傾斜角度θb(以降、基体傾斜角度θbということがある)は、より詳しくは、それぞれ、Y軸周り方向(ピッチ方向)の成分θb_xと、X軸周り方向(ロール方向)の成分θb_yとから成る。同様に、計測する傾斜角速度θbdot(以降、基体傾斜角速度θbdotということがある)も、Y軸周り方向(ピッチ方向)の成分θbdot_x(=dθb_x/dt)と、X軸周り方向(ロール方向)の成分θbdot_y(=dθb_y/dt)とから成る。 In this case, the tilt angle θb to be measured (hereinafter also referred to as the base body tilt angle θb) is more specifically, the component θb_x in the Y axis direction (pitch direction) and the X axis direction (roll direction), respectively. It consists of component θb_y. Similarly, the measured tilt angular velocity θbdot (hereinafter also referred to as the base tilt angular velocity θbdot) is also measured in the Y-axis direction (pitch direction) component θbdot_x (= dθb_x / dt) and the X-axis direction (roll direction). Component θbdot_y (= dθb_y / dt).
補足すると、本実施形態では、基体9の支柱フレーム13と一体に足載せ部3のステップ3R,3Lが傾動するので、基体傾斜角度θbは、足載せ部3の傾斜角度としての意味も持つ。
Supplementally, in this embodiment, the
なお、本実施形態の説明では、上記基体傾斜角度θbなど、X軸及びY軸の各方向(又は各軸周り方向)の成分を有する運動状態量等の変数、あるいは、該運動状態量に関連する係数等の変数に関しては、その各成分を区別して表記する場合に、該変数の参照符号に、添え字“_x”又は“_y”を付加する。 In the description of the present embodiment, a variable such as a motion state quantity having a component in each direction of the X axis and the Y axis (or a direction around each axis) such as the base body inclination angle θb, or a relation to the motion state quantity. For a variable such as a coefficient to be processed, a suffix “_x” or “_y” is added to the reference symbol of the variable when each component is expressed separately.
この場合において、並進速度等の並進運動に係わる変数については、そのX軸方向の成分に添え字“_x”を付加し、Y軸方向の成分に添え字“_y”を付加する。 In this case, for a variable related to translational motion such as translational speed, a subscript “_x” is added to the component in the X-axis direction, and a subscript “_y” is added to the component in the Y-axis direction.
一方、角度、回転速度(角速度)、角加速度など、回転運動に係わる変数については、並進運動に係わる変数と添え字を揃えるために、便宜上、Y軸周り方向の成分に添え字“_x”を付加し、X軸周り方向の成分に添え字“_y”を付加する。 On the other hand, for variables related to rotational motion, such as angle, rotational speed (angular velocity), angular acceleration, etc., the subscript “_x” is added to the component around the Y axis for convenience in order to align the subscript with the variable related to translational motion. In addition, the subscript “_y” is added to the component around the X axis.
さらに、X軸方向の成分(又はY軸周り方向の成分)と、Y軸方向の成分(又はX軸周り方向の成分)との組として変数を表記する場合には、該変数の参照符号に添え字“_xy”を付加する。例えば、上記基体傾斜角度θbを、Y軸周り方向の成分θb_xとX軸周り方向の成分θb_yの組として表現する場合には、「基体傾斜角度θb_xy」というように表記する。 Further, when a variable is expressed as a set of a component in the X-axis direction (or a component around the Y-axis) and a component in the Y-axis direction (or a component around the X-axis), the reference numeral of the variable The subscript “_xy” is added. For example, when the base body tilt angle θb is expressed as a set of a component θb_x around the Y axis and a component θb_y around the X axis, it is expressed as “base body tilt angle θb_xy”.
前記荷重センサ54R,54Lのうちの荷重センサ54Rは、乗員がその右足をステップ3Rに載せている場合に、その右足からステップ3Rに付与される荷重を受けるようにステップ3Rに内蔵され、その荷重に応じた検出信号を制御ユニット50に出力する。同様に、荷重センサ54Lは、乗員がその左足をステップ3Lに載せている場合に、その左足からステップ3Lに付与される荷重を受けるようにステップ3Lに内蔵され、その荷重に応じた検出信号を制御ユニット50に出力する。そして、制御ユニット50が、これらの荷重センサ54R,54Lの出力により示される荷重の計測値に基づいて、ステップ3R,3Lに乗員が足を載せているか否かを判断する。この場合、乗員がステップ3R,3Lの両方に乗員が足を載せている状態が、乗員が車両1に搭乗している状態を意味する。
The
なお、荷重センサ54R,54Lの代わりに、例えば、乗員が各ステップ3R,3Lに足を載せた状態でONとなるようなスイッチ式のセンサを用いてもよい。
Instead of the
ロータリエンコーダ56Rは、電動モータ31Rの出力軸が所定角度回転する毎にパルス信号を発生し、このパルス信号を制御ユニット50に出力する。そして、制御ユニット50が、そのパルス信号を基に、電動モータ53Rの出力軸の回転角度を計測し、さらにその回転角度の計測値の時間的変化率(微分値)を電動モータ53Rの回転角速度として計測する。電動モータ31L側のロータリエンコーダ56Lについても同様である。
The rotary encoder 56 </ b> R generates a pulse signal each time the output shaft of the
前記搭乗/降車用操作子58は、本実施形態では、グリップ15R,15Lの一方、例えば、グリップ15Rに装着されている。この搭乗/降車量操作子58は、例えば、その一端部58aと他端部59bとを選択的に押し操作可能なスイッチであり、各端部58a,58bを押し操作した時に、それぞれの押し操作に応じた信号(単発的なトリガ信号)を制御ユニット50に出力する。この場合、本実施形態では、端部58a,58bのうちの一方、例えば端部58aは、乗員が車両1に搭乗しようとする時(詳しくは搭乗行為を開始しようとする時)に押し操作を行なうべき部分、他方の端部58bは、乗員が車両1から降車しようとする時(詳しくは降車行為を開始しようとする時)に押し操作を行なうべき部分となっている。以降、搭乗/降車用操作子58の端部58a,58bを、それぞれ搭乗用操作部58a、降車用操作部58bという。
In this embodiment, the boarding /
なお、搭乗用操作部58a、降車用操作部58bの両方の押し操作が行なわれていない状態では、搭乗/降車用操作子58は、非操作状態(トリガ信号を出力しない状態)に復元する。
It should be noted that when both the boarding operation unit 58a and the getting-off
制御ユニット50は、上記の各計測値と、搭乗/降車用操作子58から適宜入力されるトリガ信号とを用いて所定の演算処理を実行することによって、電動モータ31R,31Lのそれぞれの回転角速度の目標値である速度指令を決定し、その速度指令に従って、電動モータ31R,31Lのそれぞれの回転角速度をフィードバック制御する。
The
なお、電動モータ31Rの出力軸の回転角速度と、回転部材27Rの回転角速度との間の関係は、該出力軸と回転部材27Rとの間の一定値の減速比に応じた比例関係になるので、本実施形態の説明では、便宜上、電動モータ31Rの回転角速度は、回転部材27Rの回転角速度を意味するものとする。同様に、電動モータ31Lの回転角速度は、回転部材27Lの回転角速度を意味するものとする。
The relationship between the rotational angular velocity of the output shaft of the
以下に、制御ユニット50の制御処理をさらに詳細に説明する。
Hereinafter, the control process of the
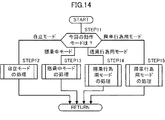
制御ユニット50は、所定の制御処理周期で図7のフローチャートに示す処理(メインルーチン処理)を実行する。
The
まず、STEP1において、制御ユニット50は、傾斜センサ52の出力を取得する。
First, in
次いで、STEP2に進んで、制御ユニット50は、取得した傾斜センサ52の出力を基に、基体傾斜角度θbの計測値θb_xy_sと、基体傾斜角速度θbdotの計測値θbdot_xy_sとを算出する。
Next, proceeding to
なお、以降の説明では、上記計測値θb_xy_sなど、変数(状態量)の実際の値の観測値(計測値又は推定値)を参照符号により表記する場合に、該変数の参照符号に、添え字“_s”を付加する。 In the following description, when an observed value (measured value or estimated value) of an actual value of a variable (state quantity) such as the measured value θb_xy_s is represented by a reference symbol, a subscript is added to the reference symbol of the variable. Add “_s”.
次いで、制御ユニット50は、STEP3において、荷重センサ54R,54Lの出力と、搭乗/降車用操作子58の出力とを取得した後、STEP4の処理を実行する。
Next, after acquiring the outputs of the
ここで、本実施形態では、車両1の動作モードとして、乗員が車両1に搭乗している状態(搭乗中の状態)での動作モードである搭乗中モードと、乗員が車両1に搭乗していない状態である自立モード(非搭乗中モード)と、乗員が車両1に搭乗しようとしている時(搭乗行為中)の動作モードである搭乗行為用モードと、乗員が車両1から降車しようとしている時(降車行為中)の動作モードである降車行為用モードとがある。そして、制御ユニット50は、それぞれ各動作モードにおいて、それぞれに適した制御特性で車輪体5の移動動作を制御する。
Here, in the present embodiment, as the operation mode of the
上記STEP4の処理は、荷重センサ54R,54Lの出力や、搭乗/降車用操作子58の出力に基づいて、車両1の動作モードを決定し、その決定した動作モードでの制御特性を規定する制御特性パラメータを決定する処理である。その処理の詳細は後述するが、本実施形態では、このSTEP4の処理で決定する制御特性パラメータには、基体9の傾斜角度の目標値である基体傾斜角度目標値θb_xy_objが含まれると共に、後述する第2ゲイン調整パラメータKr2が含まれる。
In the processing of STEP4, the operation mode of the
この場合、基体傾斜角度目標値θb_xy_objは各動作モードにおいて、基本的には次のように決定される。すなわち、搭乗中モードでは、車両1に搭乗した乗員との全体の重心点(以降、車両・乗員全体重心点という)が車輪体5の接地面のほぼ真上に位置する状態となる基体9の姿勢において、傾斜センサ52の出力に基づき計測される基体傾斜角度θbの計測値θb_xy_sに一致又はほぼ一致するようにあらかじめ設定された値(以降、搭乗モード用の設定値θb_xy_搭乗中ということがある)が、θb_xy_objとして決定される。
In this case, the base body tilt angle target value θb_xy_obj is basically determined as follows in each operation mode. In other words, in the boarding mode, the
また、自立モードでは、車両1単体の重心点(以降、車両単体重心点という)が車輪体5の接地面のほぼ真上に位置する状態となる基体9の姿勢において、傾斜センサ52の出力に基づき計測される基体傾斜角度θbの計測値θb_xy_sに一致又はほぼ一致するようにあらかじめ設定された値(以降、自立モード用の設定値θb_xy_自立ということがある)が、θb_xy_objとして決定される。
Further, in the self-supporting mode, the output of the
なお、本実施形態の車両1は左右対称構造の車両であるので、θb_xy_搭乗中のX軸周り成分θb_y_搭乗中と、θb_xy_自立のX軸周り成分θb_y_自立とは同じ値である。
Since the
また、搭乗行為用モードと降車行為用モードとでは、基体9の実際の傾斜角度をθb_xy_objに一致させた状態での基体9の姿勢が、X軸周りで右側又は左側に傾いた姿勢となると共に、θb_xy_objが急激に変化することを防止するようにθb_xy_objが決定される。
Further, in the boarding action mode and the getting-off action mode, the attitude of the
補足すると、搭乗中モード又は自立モードにおいて、基体9の実際の傾斜角度をθb_xy_objに一致させた状態での基体9の姿勢は、車両1をX軸方向で見たとき、鉛直方向に起立する姿勢となる。そして、この状態では、足載せ部3のステップ3R,3Lは、それぞれの上面(各足の底面との接触面)の高さ位置(鉛直方向での高さ位置)が互いに同一もしくはほぼ同一になるようにして、水平方向に並列する。一方、搭乗行為用モードと降車行為用モードとでは、基体9の実際の傾斜角度をθb_xy_objに一致させた状態での基体9の姿勢は上記のように右側又は左側に傾くので、足載せ部3のステップ3R,3Lも傾斜する。このため、ステップ3R,3Lの並列方向(間隔方向)が、水平方向から傾斜した方向になる。
Supplementally, the posture of the
また、前記搭乗モード用の設定値θb_xy_搭乗中、前記自立モード用の設定値θb_xy_自立は、それぞれ、本発明における搭乗中モード用目標傾斜角度、非搭乗中モード用目標傾斜角度に相当する。そして、搭乗行為用モードと降車行為用モードとで、上記のように基体9が右側又は左側に傾く状態での基体傾斜角度目標値θb_xy_objが、本発明における過渡期用目標傾斜角度に相当する。
In addition, during the boarding mode setting value θb_xy_ boarding, the independent mode setting value θb_xy_independence corresponds to the in-boarding mode target inclination angle and the non-boarding mode target inclination angle in the present invention, respectively. . In the boarding action mode and the getting-off action mode, the base body tilt angle target value θb_xy_obj in a state where the
なお、いずれの動作モードにおいても、基体傾斜角速度θbdotのY軸周り方向の成分θbdot_xの目標値とX軸周り方向の成分θbdot_yの目標値とは、いずれも“0”である。このため、基体傾斜角速度θbdot_xyの目標値を設定する処理は不要である。 In any of the operation modes, the target value of the component θbdot_x in the direction around the Y axis of the base body tilt angular velocity θbdot and the target value of the component θbdot_y in the direction around the X axis are both “0”. For this reason, the process which sets the target value of base | substrate inclination angular velocity (theta) bdot_xy is unnecessary.
また、詳細は後述するが、第2ゲイン調整パラメータKr2は、“0”から“1”までの範囲内の値に設定される。この場合、搭乗中モードと自立モードとでは、Kr2の値は、“0”とされ、搭乗行為用モードと降車行為モードとでは、Kr2の値は、基本的には“0”よりも大きい値に可変的に決定される。 As will be described in detail later, the second gain adjustment parameter Kr2 is set to a value within the range from “0” to “1”. In this case, the value of Kr2 is “0” in the boarding mode and the self-sustained mode, and the value of Kr2 is basically larger than “0” in the boarding action mode and the getting-off action mode. Is variably determined.
制御ユニット50は、STEP4で制御特性パラメータを決定した後、次にSTEP5において、車両制御演算処理を実行することによって、電動モータ31R,31Lのそれぞれの速度指令を決定する。この車両制御演算処理の詳細は後述する。
After determining the control characteristic parameter in STEP 4, the
次いで、STEP6に進んで、制御ユニット50は、STEP5で決定した速度指令に応じて電動モータ31R,31Lの動作制御処理を実行する。この動作制御処理では、制御ユニット50は、STEP5で決定した電動モータ31Rの速度指令と、ロータリエンコーダ56Rの出力に基づき計測した電動モータ31Rの回転速度の計測値との偏差に応じて、該偏差を“0”に収束させるように電動モータ31Rの出力トルクの目標値(目標トルク)を決定する。そして、制御ユニット50は、その目標トルクの出力トルクを電動モータ31Rに出力させるように該電動モータ31Rの通電電流を制御する。左側の電動モータ31Lの動作制御についても同様である。
Next, proceeding to
以上が、制御ユニット50が実行する全体的な制御処理である。
The above is the overall control process executed by the
次に、説明を後回しにした前記STEP4の処理(制御特性パラメータの決定処理)とSTEP5の車両制御演算処理とを以下に詳説する。
Next, the processing of STEP 4 (control characteristic parameter determination processing) and the vehicle control calculation processing of
まず、説明の便宜上、STEP5の車両制御演算処理の詳細を説明する。
First, for convenience of explanation, the details of the vehicle control calculation process of
なお、以降の説明においては、車輪体5の接地面に重力による鉛直方向下向きの並進力を作用させる系の全体の重心点を車両系重心点という。この場合、該車両系重心点は、車両1の動作モードが搭乗中モードである場合には、前記車両・乗員全体重心点に一致し、自立モードである場合には、前記車両単体重心点に一致する。さらに、車両1の動作モードが搭乗行為用モード又は降車行為用モードである場合には、便宜上、車両系重心点の位置は、あらかじめ定められた所定位置に存するものとする。該所定位置は、車両・乗員全体重心点又は車両単体重心点の位置に一致する位置であってもよい。
In the following description, the center of gravity of the entire system in which a downward translational force caused by gravity is applied to the ground contact surface of the
また、以降の説明では、制御ユニット50が各制御処理周期で決定する値(更新する値)に関し、現在の(最新の)制御処理周期で決定する値を今回値、その1つ前の制御処理周期で決定した値を前回値ということがある。そして、今回値、前回値を特にことわらない値は、今回値を意味する。
In the following description, regarding the value (value to be updated) determined by the
また、X軸方向の速度及び加速度に関しては、前方向きを正の向きとし、Y軸方向の速度及び加速度に関しては、左向きを正の向きとする。 Further, regarding the speed and acceleration in the X-axis direction, the forward direction is a positive direction, and regarding the speed and acceleration in the Y-axis direction, the left direction is a positive direction.
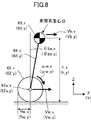
本実施形態では、搭乗中モード又は自立モードでの前記車両系重心点の動力学的な挙動(詳しくは、Y軸方向からこれに直交する面(XZ平面)に投影して見た挙動と、X軸方向からこれに直交する面(YZ平面)に投影して見た挙動)が、近似的に、図8に示すような、倒立振子モデルの挙動(倒立振子の動力学的挙動)によって表現されるものとして、STEP5の車両制御演算処理が行なわれる。 In the present embodiment, the dynamic behavior of the vehicle system center-of-gravity point in the boarding mode or the self-supporting mode (specifically, the behavior seen by projecting from the Y-axis direction onto the plane orthogonal to this (XZ plane); The behavior observed by projecting from the X-axis direction onto a plane perpendicular to this (YZ plane) is approximately expressed by the behavior of the inverted pendulum model (the dynamic behavior of the inverted pendulum) as shown in FIG. As a result, the vehicle control calculation process of STEP5 is performed.
なお、図8において、括弧を付していない参照符号は、Y軸方向から見た倒立振子モデルに対応する参照符号であり、括弧付きの参照符号は、X軸方向から見た倒立振子モデルに対応する参照符号である。 In FIG. 8, reference numerals without parentheses are reference numerals corresponding to the inverted pendulum model viewed from the Y-axis direction, and reference numerals with parentheses refer to the inverted pendulum model viewed from the X-axis direction. Corresponding reference sign.
この場合、Y軸方向から見た挙動を表現する倒立振子モデルは、車両系重心点に位置する質点60_xと、Y軸方向に平行な回転軸62a_xを有して床面上を輪転自在な仮想的な車輪62_x(以降、仮想車輪62_xという)とを備える。そして、質点60_xが、仮想車輪62_xの回転軸62a_xに直線状のロッド64_xを介して支持され、該回転軸62a_xを支点として該回転軸62a_xの周りに揺動自在とされている。 In this case, the inverted pendulum model expressing the behavior seen from the Y-axis direction has a mass point 60_x located at the center of gravity of the vehicle system and a rotation axis 62a_x parallel to the Y-axis direction. Wheel 62_x (hereinafter referred to as virtual wheel 62_x). The mass point 60_x is supported by the rotation shaft 62a_x of the virtual wheel 62_x via the linear rod 64_x, and can swing around the rotation shaft 62a_x with the rotation shaft 62a_x as a fulcrum.
この倒立振子モデルでは、質点60_xの運動が、Y軸方向から見た車両系重心点の運動に相当する。また、鉛直方向に対するロッド64_xの傾斜角度θbe_xがY軸周り方向での基体傾斜角度計測値θb_x_sとSTEP4の処理で後述する如く決定される基体傾斜角度目標値θb_x_objという)との偏差θbe_x_s(=θb_x_s−θb_x_obj)に一致するものとされる。また、ロッド64_xの傾斜角度θbe_xの変化速度(=dθbe_x/dt)がY軸周り方向の基体傾斜角速度計測値θbdot_x_sに一致するものとされる。また、仮想車輪62_xの移動速度Vw_x(X軸方向の並進移動速度)は、車両1の車輪体5のX軸方向の移動速度に一致するものとされる。
In this inverted pendulum model, the motion of the mass point 60_x corresponds to the motion of the vehicle system center of gravity as viewed from the Y-axis direction. Further, the tilt angle θbe_x of the rod 64_x with respect to the vertical direction is a deviation θbe_x_s (= θb_x_s) between the base body tilt angle measurement value θb_x_s in the direction around the Y axis and the base body tilt angle target value θb_x_obj determined as described later in STEP4. −θb_x_obj). Further, the changing speed (= dθbe_x / dt) of the inclination angle θbe_x of the rod 64_x is set to coincide with the measured body inclination angular velocity θbdot_x_s in the direction around the Y axis. Further, the movement speed Vw_x (translation movement speed in the X-axis direction) of the virtual wheel 62_x is the same as the movement speed in the X-axis direction of the
同様に、X軸方向から見た挙動を表現する倒立振子モデル(図8の括弧付きの符号を参照)は、車両系重心点に位置する質点60_yと、X軸方向に平行な回転軸62a_yを有して床面上を輪転自在な仮想的な車輪62_y(以降、仮想車輪62_yという)とを備える。そして、質点60_yが、仮想車輪62_yの回転軸62a_yに直線状のロッド64_yを介して支持され、該回転軸62a_yを支点として該回転軸62a_yの周りに揺動自在とされている。 Similarly, an inverted pendulum model (refer to the reference numerals in parentheses in FIG. 8) expressing the behavior viewed from the X-axis direction includes a mass point 60_y located at the vehicle system center of gravity and a rotation axis 62a_y parallel to the X-axis direction. And virtual wheels 62_y (hereinafter referred to as virtual wheels 62_y) that can rotate on the floor surface. The mass point 60_y is supported by the rotation shaft 62a_y of the virtual wheel 62_y via a linear rod 64_y, and can swing around the rotation shaft 62a_y with the rotation shaft 62a_y as a fulcrum.
この倒立振子モデルでは、質点60_yの運動が、X軸方向から見た車両系重心点の運動に相当する。また、鉛直方向に対するロッド64_yの傾斜角度θbe_yがX軸周り方向での基体傾斜角度計測値θb_y_sと、後述する如く決定される基体傾斜角度目標値θb_y_objとの偏差θbe_y_s(=θb_y_s−θb_y_obj)に一致するものとされる。また、ロッド64_yの傾斜角度θbe_yの変化速度(=dθbe_y/dt)がX軸周り方向の基体傾斜角速度計測値θbdot_y_sに一致するものとされる。また、仮想車輪62_yの移動速度Vw_y(Y軸方向の並進移動速度)は、車両1の車輪体5のY軸方向の移動速度に一致するものとされる。
In this inverted pendulum model, the motion of the mass point 60_y corresponds to the motion of the vehicle system center-of-gravity point viewed from the X-axis direction. Further, the inclination angle θbe_y of the rod 64_y with respect to the vertical direction coincides with the deviation θbe_y_s (= θb_y_s−θb_y_obj) between the base body tilt angle measured value θb_y_s in the direction around the X axis and the base body tilt angle target value θb_y_obj determined as described later. It is supposed to be. In addition, the change speed (= dθbe_y / dt) of the inclination angle θbe_y of the rod 64_y coincides with the measured base body inclination angular velocity θbdot_y_s in the direction around the X axis. Further, the moving speed Vw_y (translational moving speed in the Y-axis direction) of the virtual wheel 62_y is set to coincide with the moving speed in the Y-axis direction of the
なお、仮想車輪62_x,62_yは、それぞれ、あらかじめ定められた所定値Rw_x,Rw_yの半径を有するものとされる。 The virtual wheels 62_x and 62_y are assumed to have predetermined radii of predetermined values Rw_x and Rw_y, respectively.
また、仮想車輪62_x,62_yのそれぞれの回転角速度ωw_x,ωw_yと、電動モータ31R,31Lのそれぞれの回転角速度ω_R,ω_L(より正確には、回転部材27R,27Lのそれぞれの回転角速度ω_R,ω_L)との間には、次式01a,01bの関係が成立するものとされる。
Further, the rotational angular velocities ωw_x and ωw_y of the virtual wheels 62_x and 62_y and the rotational angular velocities ω_R and ω_L of the
ωw_x=(ω_R+ω_L)/2 ……式01a
ωw_y=C・(ω_R−ω_L)/2 ……式01b
なお、式01bにおける“C”は、前記フリーローラ29R,29Lと車輪体5との間の機構的な関係や滑りに依存する所定値の係数である。また、ωw_x,ω_R,ω_Lの正の向きは、仮想車輪62_xが前方に向かって輪転する場合の該仮想車輪62_xの回転方向、ωw_yの正の向きは、仮想車輪62_yが左向きに輪転する場合の該仮想車輪62_yの回転方向である。
ωw_x = (ω_R + ω_L) / 2 Equation 01a
ωw_y = C · (ω_R−ω_L) / 2 …… Formula 01b
Note that “C” in the expression 01b is a coefficient of a predetermined value depending on the mechanical relationship between the
ここで、図8に示す倒立振子モデルの動力学は、次式03x,03yにより表現される。なお、式03xは、Y軸方向から見た倒立振子モデルの動力学を表現する式、式03yは、X軸方向から見た倒立振子モデルの動力学を表現する式である。 Here, the dynamics of the inverted pendulum model shown in FIG. 8 is expressed by the following equations 03x and 03y. The expression 03x is an expression expressing the dynamics of the inverted pendulum model viewed from the Y-axis direction, and the expression 03y is an expression expressing the dynamics of the inverted pendulum model viewed from the X-axis direction.
d2θbe_x/dt2=α_x・θbe_x+β_x・ωwdot_x ……式03x
d2θbe_y/dt2=α_y・θbe_y+β_y・ωwdot_y ……式03y
式03xにおけるωwdot_xは仮想車輪62_xの回転角加速度(回転角速度ωw_xの1階微分値)、α_xは、質点60_xの質量や高さh_xに依存する係数、β_xは、仮想車輪62_xのイナーシャ(慣性モーメント)や半径Rw_xに依存する係数である。式03yにおけるωwdot_y、α_y、β_yについても上記と同様である。
d 2 θbe_x / dt 2 = α_x · θbe_x + β_x · ωwdot_x ...... Formula 03x
d 2 θbe_y / dt 2 = α_y · θbe_y + β_y · ωwdot_y ...... Formula 03y
In equation 03x, ωwdot_x is the rotational angular acceleration of the virtual wheel 62_x (first-order differential value of the rotational angular velocity ωw_x), α_x is a coefficient that depends on the mass and height h_x of the mass 60_x, and β_x is the inertia (moment of inertia of the virtual wheel 62_x ) And the radius Rw_x. The same applies to ωwdot_y, α_y, and β_y in Expression 03y.
これらの式03x,03yから判るように、倒立振子の質点60_x,60_yの運動(ひいては車両系重心点の運動)は、それぞれ、仮想車輪62_xの回転角加速度ωwdot_x、仮想車輪62_yの回転角加速度ωwdot_yに依存して規定される。 As can be seen from these equations 03x and 03y, the motions of the mass points 60_x and 60_y of the inverted pendulum (and hence the motion of the vehicle system center of gravity) are respectively the rotational angular acceleration ωwdot_x of the virtual wheel 62_x and the rotational angular acceleration ωwdot_y of the virtual wheel 62_y. It is defined depending on.
そこで、本実施形態では、Y軸方向から見た車両系重心点の運動を制御するための操作量(制御入力)として、仮想車輪62_xの回転角加速度ωwdot_xを用いると共に、X軸方向から見た車両系重心点の運動を制御するための操作量(制御入力)として、仮想車輪62_yの回転角加速度ωwdot_yを用いる。 Therefore, in the present embodiment, the rotational angular acceleration ωwdot_x of the virtual wheel 62_x is used as an operation amount (control input) for controlling the motion of the vehicle system center of gravity point viewed from the Y-axis direction, and viewed from the X-axis direction. The rotational angular acceleration ωwdot_y of the virtual wheel 62_y is used as an operation amount (control input) for controlling the motion of the vehicle system center of gravity.
そして、STEP9の車両制御演算処理を概略的に説明すると、制御ユニット50は、X軸方向で見た質点60_xの運動と、Y軸方向で見た質点60_yの運動とが、車両系重心点の所望の運動に対応する運動となるように、操作量としての上記回転角加速度ωwdot_x,ωwdot_yの指令値(目標値)である仮想車輪回転角加速度指令ωwdot_x_cmd,ωwdot_y_cmdを決定する。さらに、制御ユニット50は、仮想車輪回転角加速度指令ωwdot_x_cmd,ωwdot_y_cmdをそれぞれ積分してなる値を、仮想車輪62_x,62_yのそれぞれの回転角速度ωw_x,ωw_yの指令値(目標値)である仮想車輪回転角速度指令ωw_x_cmd,ωw_y_cmdとして決定する。
Then, the vehicle control arithmetic processing in
そして、制御ユニット50は、仮想車輪回転角速度指令ωw_x_cmdに対応する仮想車輪62_xの移動速度(=Rw_x・ωw_x_cmd)と、仮想車輪回転角速度指令ωw_y_cmdに対応する仮想車輪62_yの移動速度(=Rw_y・ωw_y_cmd)とを、それぞれ、車両1の車輪体5のX軸方向の目標移動速度、Y軸方向の目標移動速度とし、それらの目標移動速度を実現するように、電動モータ31R,31Lのそれぞれの速度指令ω_R_cmd,ωL_cmdを決定する。
Then, the
なお、本実施形態では、操作量(制御入力)としての上記仮想車輪回転角加速度指令ωwdot_x_cmd,ωwdot_y_cmdは、それぞれ、後述する式07x,07yに示す如く、3個の操作量成分を加え合わせることによって決定される。 In this embodiment, the virtual wheel rotation angular acceleration commands ωwdot_x_cmd and ωwdot_y_cmd as the operation amount (control input) are obtained by adding three operation amount components as shown in equations 07x and 07y described later, respectively. It is determined.
補足すると、本実施形態における操作量(制御入力)としての上記仮想車輪回転角加速度指令ωwdot_x_cmd,ωwdot_y_cmdのうち、ωwdot_x_cmdは、X軸方向に移動する仮想車輪62_xの回転角速度であるから、車輪体5をX軸方向に移動させるために該車輪体5に付与すべき駆動力を規定する操作量として機能するものとなる。また、ωwdot_y_cmdは、Y軸方向に移動する仮想車輪62_yの回転角速度であるから、車輪体5をY軸方向に移動させるために該車輪体5に付与すべき駆動力を規定する操作量として機能するものとなる。
Supplementally, among the virtual wheel rotation angular acceleration commands ωwdot_x_cmd and ωwdot_y_cmd as the operation amount (control input) in the present embodiment, ωwdot_x_cmd is the rotation angular velocity of the virtual wheel 62_x moving in the X-axis direction. This functions as an operation amount that defines the driving force to be applied to the
制御ユニット50は、上記の如き、STEP5の車両制御演算処理を実行するための機能として、図9のブロック図で示す機能を備えている。
As described above, the
すなわち、制御ユニット50は、基体傾斜角度計測値θb_xy_sと基体傾斜角度目標値θb_xy_objとの偏差である基体傾斜角度偏差計測値θbe_xy_sを算出する偏差演算部70と、前記車両系重心点の移動速度である重心速度Vb_xyの観測値としての重心速度推定値Vb_xy_sを算出する重心速度算出部72と、電動モータ31R,31Lの回転角速度の許容範囲に応じた制限を加味して、重心速度Vb_xyの目標値としての制御用目標重心速度Vb_xy_mdfdを決定する重心速度制限部76と、後述する式07x,07yのゲイン係数の値を調整するための第1ゲイン調整パラメータKr1_xyを決定するゲイン調整部78とを備える。
That is, the
制御ユニット50は、さらに、前記仮想車輪回転角速度指令ωw_xy_cmdを算出する姿勢制御演算部80と、この仮想車輪回転角速度指令ωw_xy_cmdを、右側の電動モータ31Rの速度指令ω_R_cmd(回転角速度の指令値)と左側の電動モータ31Lの速度指令ω_L_cmd(回転角速度の指令値)との組に変換するモータ指令演算部82とを備える。
The
なお、図9中の参照符号84を付したものは、姿勢制御演算部70が制御処理周期毎に算出する仮想車輪回転角速度指令ωw_xy_cmdを入力する遅延要素を示している。該遅延要素84は、各制御処理周期において、仮想車輪回転角速度指令ωw_xy_cmdの前回値ωw_xy_cmd_pを出力する。
Note that the
前記STEP5の車両制御演算処理では、これらの上記の各処理部の処理が以下に説明するように実行される。 In the vehicle control calculation process of STEP5, the processes of the above-described respective processing units are executed as described below.
すなわち、制御ユニット50は、まず、偏差演算部70の処理と重心速度算出部72の処理とを実行する。
That is, the
偏差演算部70には、前記STEP2で算出された基体傾斜角度計測値θb_xy_s(θb_x_s及びθb_y_s)と、前記STEP4で後述する如く決定される基体傾斜角度目標値θb_xy_obj(θb_x_obj及びθb_y_obj)とが入力される。そして、偏差演算部70は、θb_x_sからθb_x_objを減算することによって、Y軸周り方向の基体傾斜角度偏差計測値θbe_x_s(=θb_x_s−θb_x_obj)を算出すると共に、θb_y_sからθb_y_objを減算することによって、X軸周り方向の基体傾斜角度偏差計測値θbe_y_s(=θb_y_s−θb_y_obj)を算出する。
The
なお、偏差演算部70の処理は、例えば、前記STEP4の処理の中で実行してもよい。
The process of the
前記重心速度算出部72には、前記STEP2で算出された基体傾斜角速度計測値θbdot_xy_s(θbdot_x_s及びθbdot_y_s)の今回値が入力されると共に、仮想車輪速度指令ωw_xy_cmdの前回値ωw_xy_cmd_p(ωw_x_cmd_p及びωw_y_cmd_p)が遅延要素84から入力される。そして、重心速度算出部72は、これらの入力値から、前記倒立振子モデルに基づく所定の演算式によって、重心速度推定値Vb_xy_s(Vb_x_s及びVb_y_s)を算出する。
The center-of-gravity
具体的には、重心速度算出部72は、次式05x,05yにより、Vb_x_s及びVb_y_sをそれぞれ算出する。
Specifically, the center-of-gravity
Vb_x_s=Rw_x・ωw_x_cmd_p+h_x・θbdot_x_s ……05x
Vb_y_s=Rw_y・ωw_y_cmd_p+h_y・θbdot_y_s ……05y
これらの式05x,05yにおいて、Rw_x,Rw_yは、前記したように、仮想車輪62_x,62_yのそれぞれの半径であり、これらの値は、あらかじめ設定された所定値である。また、h_x,h_yは、それぞれ倒立振子モデルの質点60_x,60_yの高さである。この場合、本実施形態では、車両1の各動作モードにおいて、それぞれ、車両系重心点の高さはほぼ一定に維持されるものとされる。そして、h_x,h_yの値としては、それぞれ、各動作モード毎にあらかじめ設定された所定値が用いられる。
Vb_x_s = Rw_x · ωw_x_cmd_p + h_x · θbdot_x_s ...... 05x
Vb_y_s = Rw_y · ωw_y_cmd_p + h_y · θbdot_y_s …… 05y
In these expressions 05x and 05y, Rw_x and Rw_y are the respective radii of the virtual wheels 62_x and 62_y as described above, and these values are predetermined values set in advance. H_x and h_y are the heights of the mass points 60_x and 60_y of the inverted pendulum model, respectively. In this case, in this embodiment, in each operation mode of the
なお、h_x,h_yの値は、動作モード毎に異なる値である必要はない。例えば、搭乗行為用モード又は降車行為用モードでのh_x,h_yの値が、搭乗中モードと同じ値に設定されていてもよい。 Note that the values of h_x and h_y do not have to be different for each operation mode. For example, the values of h_x and h_y in the boarding action mode or the getting-off action mode may be set to the same values as in the boarding mode.
上記式05xの右辺の第1項は、仮想車輪62_xの速度指令の前回値ωw_x_cmd_pに対応する該仮想車輪62_xのX軸方向の移動速度であり、この移動速度は、車輪体5のX軸方向の実際の移動速度の現在値に相当するものである。また、式05xの右辺の第2項は、基体9がY軸周り方向にθbdot_x_sの傾斜角速度で傾動することに起因して生じる車両系重心点のX軸方向の移動速度(車輪体5に対する相対的な移動速度)の現在値に相当するものである。これらのことは、式05yについても同様である。
The first term on the right side of the formula 05x is the moving speed in the X-axis direction of the virtual wheel 62_x corresponding to the previous value ωw_x_cmd_p of the speed command of the virtual wheel 62_x, and this moving speed is the X-axis direction of the
なお、前記ロータリエンコーダ56R,56Lの出力を基に計測される電動モータ31R,31Lのそれぞれの回転角速度の計測値(今回値)の組を、仮想車輪62_x,62_yのそれぞれの回転角速度の組に変換し、それらの回転角速度を、式05x、05yのωw_x_cmd_p、ωw_y_cmd_pの代わりに用いてもよい。ただし、回転角速度の計測値に含まれるノイズの影響を排除する上では、目標値であるωw_x_cmd_p、ωw_y_cmd_pを使用することが有利である。
Note that a set of measured values (current values) of the respective rotational angular velocities of the
次に、制御ユニット50は、重心速度制限部76の処理とゲイン調整部78の処理とを実行する。この場合、重心速度制限部76及びゲイン調整部78には、それぞれ、重心速度算出部72で上記の如く算出された重心速度推定値Vb_xy_s(Vb_x_s及びVb_y_s)が入力される。
Next, the
そして、ゲイン調整部78は、入力された重心速度推定値Vb_xy_s(Vb_x_s及びVb_y_s)を基に、前記第1ゲイン調整パラメータKr1_xy(Kr1_x及びKr1_y)を決定する。
Then, the
このゲイン調整部78の処理を図10及び図11を参照して以下に説明する。
The processing of the
図10に示すように、ゲイン調整部78は、入力された重心速度推定値Vb_x_s,Vb_y_sをリミット処理部86に入力する。このリミット処理部86では、重心速度推定値Vb_x_s,Vb_y_sに、電動モータ31R,31Lのそれぞれの回転角速度の許容範囲に応じた制限を適宜、加えることによって、出力値Vw_x_lim1,Vw_y_lim1を生成する。出力値Vw_x_lim1は、前記仮想車輪62_xのX軸方向の移動速度Vw_xの制限後の値、出力値Vw_y_lim1は、前記仮想車輪62_yのY軸方向の移動速度Vw_yの制限後の値としての意味を持つ。
As shown in FIG. 10, the
このリミット処理部86の処理を、図11を参照してさらに詳細に説明する。なお、図11中の括弧付きの参照符号は、後述する重心速度制限部76のリミット処理部100の処理を示すものであり、リミット処理部86の処理に関する説明では無視してよい。
The processing of the
リミット処理部86は、まず、重心速度推定値Vb_x_s,Vb_y_sをそれぞれ処理部86a_x,86a_yに入力する。処理部86a_xは、Vb_x_sを仮想車輪62_xの半径Rw_xで除算することによって、仮想車輪62_xのX軸方向の移動速度をVb_x_sに一致させたと仮定した場合の該仮想車輪62_xの回転角速度ωw_x_sを算出する。同様に、処理部86a_yは、仮想車輪62_yのY軸方向の移動速度をVb_y_sに一致させたと仮定した場合の該仮想車輪62_yの回転角速度ωw_y_s(=Vb_y_s/Rw_y)を算出する。
First, the
次いで、リミット処理部86は、ωw_x_s,ωw_y_sの組を、XY−RL変換部86bにより、電動モータ31Rの回転角速度ω_R_sと電動モータ31Lの回転角速度ω_L_sとの組に変換する。
Next, the
この変換は、本実施形態では、前記式01a,01bのωw_x,ωw_y,ω_R,ω_Lをそれぞれ、ωw_x_s,ωw_y_s,ω_R_s,ω_L_sに置き換えて得られる連立方程式を、ω_R_s,ω_L_sを未知数として解くことにより行なわれる。 In this embodiment, this conversion is performed by solving simultaneous equations obtained by replacing ωw_x, ωw_y, ω_R, and ω_L in the equations 01a and 01b with ωw_x_s, ωw_y_s, ω_R_s, and ω_L_s, with ω_R_s and ω_L_s as unknowns. Done.
次いで、リミット処理部86は、XY−RL変換部86bの出力値ω_R_s,ω_L_sをそれぞれ、リミッタ86c_R,86c_Lに入力する。このとき、リミッタ86c_Rは、ω_R_sが、あらかじめ設定された所定値の上限値(>0)と下限値(<0)とを有する右モータ用許容範囲内に収まっている場合には、ω_R_sをそのまま出力値ω_R_lim1として出力する。また、リミッタ86c_Rは、ω_R_sが、右モータ用許容範囲から逸脱している場合には、該右モータ用許容範囲の上限値と下限値とのうちのω_R_sに近い方の境界値を出力値ω_R_lim1として出力する。これにより、リミッタ86c_Rの出力値ω_R_lim1は、右モータ用許容範囲内の値に制限される。
Next, the
同様に、リミッタ86c_Lは、ω_L_sが、あらかじめ設定された所定値の上限値(>0)と下限値(<0)とを有する左モータ用許容範囲内に収まっている場合には、ω_L_sをそのまま出力値ω_L_lim1として出力する。また、リミッタ86c_Lは、ω_L_sが、左モータ用許容範囲から逸脱している場合には、該左モータ用許容範囲の上限値と下限値とのうちのω_L_sに近い方の境界値を出力値ω_L_lim1として出力する。これにより、リミッタ86c_Lの出力値ω_L_lim1は、左モータ用許容範囲内の値に制限される。 Similarly, when the limiter 86c_L is within the allowable range for the left motor having a predetermined upper limit value (> 0) and lower limit value (<0), the limiter 86c_L keeps ω_L_s as it is. Output as output value ω_L_lim1. Further, when ω_L_s deviates from the left motor allowable range, the limiter 86c_L outputs the boundary value closer to ω_L_s between the upper limit value and the lower limit value of the left motor allowable range as the output value ω_L_lim1. Output as. As a result, the output value ω_L_lim1 of the limiter 86c_L is limited to a value within the left motor allowable range.
上記右モータ用許容範囲は右側の電動モータ31Rの回転角速度(絶対値)が高くなり過ぎないようにし、ひいては、電動モータ31Rが出力可能なトルクの最大値が低下するのを防止するために設定された許容範囲である。このことは、左モータ用許容範囲についても同様である。
The allowable range for the right motor is set so that the rotational angular velocity (absolute value) of the right
次いで、リミット処理部86は、リミッタ86c_R,86c_Lのそれぞれの出力値ω_R_lim1,ω_L_lim1の組を、RL−XY変換部86dにより、仮想車輪62_x,62_yのそれぞれの回転角速度ωw_x_lim1,ωw_y_lim1の組に変換する。
Next, the
この変換は、前記XY−RL変換部86bの変換処理の逆変換の処理である。この処理は、前記式01a,01bのωw_x,ωw_y,ω_R,ω_Lをそれぞれ、ωw_x_lim1,ωw_y_lim1,ω_R_lim1,ω_L_lim1に置き換えて得られる連立方程式を、ωw_x_lim1,ωw_y_lim1を未知数として解くことにより行なわれる。 This conversion is a reverse conversion process of the conversion process of the XY-RL conversion unit 86b. This processing is performed by solving simultaneous equations obtained by replacing ωw_x, ωw_y, ω_R, and ω_L in the equations 01a and 01b with ωw_x_lim1, ωw_y_lim1, ω_R_lim1, and ω_L_lim1 as ωw_x_lim1 and ωw_y_lim1.
次いで、リミット処理部86は、RL−XY変換部86dの出力値ωw_x_lim1,ωw_y_lim1をそれぞれ処理部86e_x,86e_yに入力する。処理部86e_xは、ωw_x_lim1に仮想車輪62_xの半径Rw_xを乗じることによって、ωw_x_lim1を仮想車輪62_xの移動速度Vw_x_lim1に変換する。同様に、処理部86e_yは、ωw_y_lim1を仮想車輪62_yの移動速度Vw_y_lim1(=ωw_y_lim1・Rw_y)に変換する。
Next, the
以上のリミット処理部86の処理によって、仮想車輪62_xのX軸方向の移動速度Vw_xと、仮想車輪62_yのY軸方向の移動速度Vw_yとをそれぞれ重心速度推定値Vb_x_s,Vb_y_sに一致させたと仮定した場合(換言すれば、車輪体5のX軸方向の移動速度とY軸方向の移動速度とをそれぞれ、Vb_x_s,Vb_y_sに一致させたと仮定した場合)に、それらの移動速度を実現するために必要な電動モータ31R,31Lのそれぞれの回転角速度ω_R_s,ω_L_sが、両方とも、許容範囲内に収まっている場合には、Vb_x_s,Vb_y_sにそれぞれ一致する出力値Vw_x_lim1,Vw_y_lim1の組がリミット処理部86から出力される。
It is assumed that the movement speed Vw_x of the virtual wheel 62_x in the X-axis direction and the movement speed Vw_y of the virtual wheel 62_y in the Y-axis direction are made to coincide with the center-of-gravity speed estimated values Vb_x_s and Vb_y_s, respectively, by the above processing of the
一方、電動モータ31R,31Lのそれぞれの回転角速度ω_R_s,ω_L_sの両方又は一方が許容範囲から逸脱している場合には、その両方又は一方の回転角速度が強制的に許容範囲内に制限された上で、その制限後の電動モータ31R,31Lのそれぞれの回転角速度ω_R_lim1,ω_L_lim1の組に対応する、X軸方向及びY軸方向の移動速度Vw_x_lim1,Vw_y_lim1の組がリミット処理部86から出力される。
On the other hand, when both or one of the rotational angular velocities ω_R_s and ω_L_s of the
従って、リミット処理部86は、その出力値Vw_x_lim1,Vw_y_lim1の組に対応する電動モータ31R,31Lのそれぞれの回転角速度が許容範囲を逸脱しないことを必須の必要条件として、その必要条件下で可能な限り、出力値Vw_x_lim1,Vw_y_lim1をそれぞれVb_x_s,Vb_y_sに一致させるように、出力値Vw_x_lim1,Vw_y_lim1の組を生成する。
Therefore, the
図10の説明に戻って、ゲイン調整部78は、次に、演算部88_x,88_yの処理を実行する。演算部88_xには、X軸方向の重心速度推定値Vb_x_sと、リミット処理部86の出力値Vw_x_lim1とが入力される。そして、演算部88_xは、Vw_x_lim1からVb_x_sを減算してなる値Vover_xを算出して出力する。また、演算部88_yには、Y軸方向の重心速度推定値Vb_y_sと、リミット処理部86の出力値Vw_y_lim1とが入力される。そして、演算部88_yは、Vw_y_lim1からVb_y_sを減算してなる値Vover_yを算出して出力する。
Returning to the description of FIG. 10, the
この場合、リミット処理部86での出力値Vw_x_lim1,Vw_y_lim1の強制的な制限が行なわれなかった場合には、Vw_x_lim1=Vb_x_s、Vw_y_lim1=Vb_y_sとなるので、演算部88_x,88_yのそれぞれの出力値Vover_x,Vover_yはいずれも“0”となる。
In this case, if the output values Vw_x_lim1 and Vw_y_lim1 are not forcibly limited by the
一方、リミット処理部86の出力値Vw_x_lim1,Vw_y_lim1が、入力値Vb_x_s,Vb_y_sに対して強制的な制限を施して生成された場合には、Vw_x_lim1のVb_x_sからの修正量(=Vw_x_lim1−Vb_x_s)と、Vw_y_lim1のVb_y_sからの修正量(=Vw_y_lim1−Vb_y_s)とがそれぞれ、演算部88_x,88_yから出力される。
On the other hand, when the output values Vw_x_lim1 and Vw_y_lim1 of the
次いで、ゲイン調整部78は、演算部88_xの出力値Vover_xを処理部90_x,92_xに順番に通すことによって、第1ゲイン調整パラメータKr1_xを決定する。また、ゲイン調整部78は、演算部88_yの出力値Vover_yを処理部90_y,92_yに順番に通すことによって、第1ゲイン調整パラメータKr1_yを決定する。なお、第1ゲイン調整パラメータKr_x,Kr_yは、いずれも“0”から“1”までの範囲内の値である。
Next, the
上記処理部90_xは、入力されるVover_xの絶対値を算出して出力する。また、処理部92_xは、その出力値Kr1_xが入力値|Vover_x|に対して単調に増加し、且つ、飽和特性を有するようにKr1_xを生成する。該飽和特性は、入力値がある程度大きくなると、入力値の増加に対する出力値の変化量が“0”になるか、もしくは、“0”に近づく特性である。 The processing unit 90_x calculates and outputs the absolute value of the input Vover_x. Further, the processing unit 92_x generates Kr1_x so that the output value Kr1_x monotonously increases with respect to the input value | Vover_x | and has saturation characteristics. The saturation characteristic is a characteristic in which the change amount of the output value with respect to the increase of the input value becomes “0” or approaches “0” when the input value increases to some extent.
この場合、本実施形態では、処理部92_xは、入力値|Vover_x|があらかじめ設定された所定値以下である場合には、該入力値|Vover_x|に所定値の比例係数を乗じてなる値をKr1_xとして出力する。また、処理部92_xは、入力値|Vover_x|が所定値よりも大きい場合には、“1”をKr1_xとして出力する。なお、上記比例係数は、|Vover_x|が所定値に一致するときに、|Vover_x|と比例係数との積が“1”になるように設定されている。 In this case, in this embodiment, when the input value | Vover_x | is equal to or less than a predetermined value set in advance, the processing unit 92_x sets a value obtained by multiplying the input value | Vover_x | by a proportional coefficient of the predetermined value. Output as Kr1_x. In addition, when the input value | Vover_x | is larger than the predetermined value, the processing unit 92_x outputs “1” as Kr1_x. The proportional coefficient is set so that the product of | Vover_x | and the proportional coefficient is “1” when | Vover_x | matches a predetermined value.
また、処理部90_y,92_yの処理は、それぞれ上記した処理部90_x,92_xの処理と同様である。 The processing of the processing units 90_y and 92_y is the same as the processing of the above-described processing units 90_x and 92_x, respectively.
以上説明したゲイン調整部78の処理によって、リミット処理部86での出力値Vw_x_lim1,Vw_y_lim1の強制的な制限が行なわれなかった場合、すなわち、車輪体5のX軸方向及びY軸方向のそれぞれの移動速度Vw_x,Vw_yを、それぞれ、重心速度推定値Vb_x_s,Vb_y_sに一致させるように電動モータ31R,31Lを動作させても、電動モータ31R,31Lのそれぞれの回転角速度が許容範囲内に収まるような場合には、第1ゲイン調整パラメータKr1_x,Kr1_yはいずれも“0”に決定される。従って、通常は、Kr1_x=Kr1_y=0である。
When the output values Vw_x_lim1 and Vw_y_lim1 are not forcibly limited by the
一方、リミット処理部86の出力値Vw_x_lim1,Vw_y_lim1が、入力値Vb_x_s,Vb_y_sに対して強制的な制限を施して生成された場合、すなわち、車輪体5のX軸方向及びY軸方向のそれぞれの移動速度Vw_x,Vw_yを、それぞれ、重心速度推定値Vb_x_s,Vb_y_sに一致させるように電動モータ31R,31Lを動作させると、電動モータ31R,31Lのいずれかの回転角速度が許容範囲を逸脱してしまう場合(いずれかの回転角速度の絶対値が高くなり過ぎる場合)には、前記修正量Vover_x,Vover_yのそれぞれの絶対値に応じて、第1ゲイン調整パラメータKr1_x,Kr1_yの値がそれぞれ決定される。この場合、Kr1_xは、“1”を上限値して、修正量Vx_overの絶対値が大きいほど、大きな値になるように決定される。このことは、Kr1_yについても同様である。
On the other hand, when the output values Vw_x_lim1 and Vw_y_lim1 of the
また、前記重心速度制限部76は、入力された重心速度推定値Vb_xy_s(Vb_x_s及びVb_y_s)を使用して、図12のブロック図で示す処理を実行することによって、制御用目標重心速度Vb_xy_mdfd(Vb_x_mdfd及びVb_y_mdfd)を決定する。
Further, the center-of-
具体的には、重心速度制限部76は、まず、定常偏差算出部94_x,94_yの処理を実行する。
Specifically, the center-of-gravity
この場合、定常偏差算出部94_xには、X軸方向の重心速度推定値Vb_x_sが入力されると共に、X軸方向の制御用目標重心速度Vb_x_mdfdの前回値Vb_x_mdfd_pが遅延要素96_xを介して入力される。そして、定常偏差算出部94_xは、まず、入力されるVb_x_sが比例・微分補償要素(PD補償要素)94a_xに入力する。この比例・微分補償要素94_xは、その伝達関数が1+Kd・Sにより表される補償要素であり、入力されるVb_x_sと、その微分値(時間的変化率)に所定値の係数Kdを乗じてなる値とを加算し、その加算結果の値を出力する。 In this case, the steady-state deviation calculating unit 94_x receives the estimated center-of-gravity velocity value Vb_x_s in the X-axis direction and the previous value Vb_x_mdfd_p of the control target center-of-gravity velocity Vb_x_mdfd in the X-axis direction via the delay element 96_x. . The steady deviation calculating unit 94_x first inputs the input Vb_x_s to the proportional / differential compensation element (PD compensation element) 94a_x. The proportional / differential compensation element 94_x is a compensation element whose transfer function is represented by 1 + Kd · S, and is obtained by multiplying the input Vb_x_s and its differential value (time change rate) by a predetermined coefficient Kd. Add the value and output the result of the addition.
次いで、定常偏差算出部94_xは、入力されるVb_x_mdfd_pを、比例・微分補償要素94_xの出力値から減算してなる値を演算部94b_xにより算出した後、この演算部94b_xの出力値を、位相補償機能を有するローパスフィルタ94c_xに入力する。このローパスフィルタ94c_xは、伝達関数が(1+T2・S)/(1+T1・S)により表されるフィルタである。そして、定常偏差算出部94_xは、このローパスフィルタ94c_xの出力値Vb_x_prdを出力する。 Next, the steady deviation calculating unit 94_x calculates a value obtained by subtracting the input Vb_x_mdfd_p from the output value of the proportional / differential compensation element 94_x by the calculating unit 94b_x, and then outputs the output value of the calculating unit 94b_x to the phase compensation It inputs into the low-pass filter 94c_x which has a function. The low-pass filter 94c_x is a filter whose transfer function is represented by (1 + T2 · S) / (1 + T1 · S). The steady deviation calculating unit 94_x outputs the output value Vb_x_prd of the low-pass filter 94c_x.
また、定常偏差算出部94_yには、Y軸方向の重心速度推定値Vb_y_sが入力されると共に、Y軸方向の制御用目標重心速度Vb_y_mdfdの前回値Vb_y_mdfd_pが遅延要素96_yを介して入力される。 In addition, the steady-state deviation calculating unit 94_y receives the Y-axis centroid speed estimated value Vb_y_s and the previous value Vb_y_mdfd_p of the Y-axis control target centroid speed Vb_y_mdfd via the delay element 96_y.
そして、定常偏差算出部94_yは、上記した定常偏差算出部94_xと同様に、比例・微分補償要素94a_y、演算部94b_y及びローパスフィルタ94c_yの処理を順次実行し、ローパスフィルタ94c_yの出力値Vb_y_prdを出力する。 Then, similarly to the above-described steady deviation calculation unit 94_x, the steady deviation calculation unit 94_y sequentially executes the processing of the proportional / differential compensation element 94a_y, the calculation unit 94b_y, and the low-pass filter 94c_y, and outputs the output value Vb_y_prd of the low-pass filter 94c_y. To do.
ここで、定常偏差算出部94_xの出力値Vb_x_prdは、Y軸方向から見た車両系重心点の現在の運動状態(換言すればY軸方向から見た倒立振子モデルの質点60_xの運動状態)から推測される、将来のX軸方向の重心速度推定値の収束予測値の制御用目標重心速度Vb_x_mdfdに対する定常偏差としての意味を持つものである。同様に、定常偏差算出部94_y出力値Vb_y_prdは、X軸方向から見た車両系重心点の現在の運動状態(換言すればX軸方向から見た倒立振子モデルの質点60_yの運動状態)から推測される、将来のY軸方向の重心速度推定値の収束予測値の制御用目標重心速度Vb_y_mdfdに対する定常偏差としての意味を持つものである。以降、定常偏差算出部94_x,94_yのそれぞれの出力値Vb_x_prd,Vb_y_prdを重心速度定常偏差予測値という。 Here, the output value Vb_x_prd of the steady deviation calculating unit 94_x is based on the current motion state of the vehicle system center of gravity as viewed from the Y-axis direction (in other words, the motion state of the mass point 60_x of the inverted pendulum model as viewed from the Y-axis direction). It has a meaning as a steady deviation with respect to the control target center-of-gravity speed Vb_x_mdfd of the estimated predicted center-of-gravity speed estimated value in the X-axis direction. Similarly, the steady deviation calculating unit 94_y output value Vb_y_prd is estimated from the current motion state of the vehicle system center of gravity as viewed from the X-axis direction (in other words, the motion state of the mass point 60_y of the inverted pendulum model as viewed from the X-axis direction). The convergence predicted value of the estimated center-of-gravity speed value in the future Y-axis direction has a meaning as a steady deviation with respect to the control target center-of-gravity speed Vb_y_mdfd. Hereinafter, the respective output values Vb_x_prd and Vb_y_prd of the steady deviation calculation units 94_x and 94_y are referred to as center-of-gravity velocity steady deviation prediction values.
重心速度制限部76は、上記の如く定常偏差算出部94_x,94_yの処理を実行した後、上記重心速度定常偏差予測値Vb_x_prd,Vb_y_prdをリミット処理部100に入力する。このリミット処理部100の処理は、前記したゲイン調整部78のリミット処理部86の処理と同じである。この場合、図11に括弧付きに参照符号で示す如く、リミット処理部100の各処理部の入力値及び出力値だけがリミット処理部86と相違する。
The center-of-
具体的には、リミット処理部100では、前記仮想車輪62_x,62_yのそれぞれの移動速度Vw_x,Vw_yを、Vb_x_prd,Vb_y_prdにそれぞれ一致させたと仮定した場合の各仮想車輪62_x,62_yの回転角速度ωw_x_t,ωw_y_tがそれぞれ処理部86a_x,86a_yにより算出される。そして、この回転角速度ωw_x_t,ωw_y_tの組が、XY−RL変換部86bにより、電動モータ31R,31Lの回転角速度ω_R_t,ω_L_tの組に変換される。
Specifically, in the
さらに、これらの回転角速度ω_R_t,ω_L_tが、リミッタ86c_R,86c_Lによって、それぞれ、右モータ用許容範囲内の値と左モータ用許容範囲内の値とに制限される。そして、この制限処理後の値ω_R_lim2,ω_L_lim2が、RL−XY変換部86dによって、仮想車輪62_x,62_yの回転角速度ωw_x_lim2,ωw_y_lim2に変換される。
Further, these rotational angular velocities ω_R_t and ω_L_t are limited by the limiters 86c_R and 86c_L to values within the allowable range for the right motor and values within the allowable range for the left motor, respectively. Then, the values ω_R_lim2 and ω_L_lim2 after the restriction process are converted into the rotational angular velocities ωw_x_lim2 and ωw_y_lim2 of the virtual wheels 62_x and 62_y by the RL-
次いで、この各回転角速度ωw_x_lim2,ωw_y_lim2に対応する各仮想車輪62_x,62_yの移動速度Vw_x_lim2,Vw_y_lim2がそれぞれ処理部86e_x,86e_yによって算出され、これらの移動速度Vw_x_lim2,Vw_y_lim2がリミット処理部100から出力される。
Next, the moving speeds Vw_x_lim2 and Vw_y_lim2 of the virtual wheels 62_x and 62_y corresponding to the rotational angular velocities ωw_x_lim2 and ωw_y_lim2 are calculated by the processing units 86e_x and 86e_y, respectively, and the moving speeds Vw_x_lim2 and Vw_y_lim2 are output from the
以上のリミット処理部100の処理によって、リミット処理部100は、リミット処理部86と同様に、その出力値Vw_x_lim2,Vw_y_lim2の組に対応する電動モータ31R,31Lのそれぞれの回転角速度が許容範囲を逸脱しないことを必須の必要条件として、その必要条件下で可能な限り、出力値Vw_x_lim2,Vw_y_lim2をそれぞれVb_x_t,Vb_y_tに一致させるように、出力値Vw_x_lim2,Vw_y_lim2の組を生成する。
By the above processing of the
なお、リミット処理部100における右モータ用及び左モータ用の各許容範囲は、リミット処理部86における各許容範囲と同一である必要はなく、互いに異なる許容範囲に設定されていてもよい。
Note that the permissible ranges for the right motor and the left motor in the
図12の説明に戻って、重心速度制限部76は、次に、演算部102_x,102_yの処理を実行することによって、それぞれ制御用目標重心速度Vb_x_mdfd,Vb_y_mdfdを算出する。この場合、演算部102_xは、リミット処理部100の出力値Vw_x_lim2から、X軸方向の重心速度定常偏差予測値Vb_x_prdを減算してなる値をX軸方向の制御用目標重心速度Vb_x_mdfdとして算出する。同様に、演算部102_yは、リミット処理部100の出力値Vw_y_lim2から、Y軸方向の重心速度定常偏差予測値Vb_y_prdを減算してなる値をY軸方向の制御用目標重心速度Vb_y_mdfdとして算出する。
Returning to the description of FIG. 12, the center-of-gravity
以上のようにして決定される制御用目標重心速度Vb_x_mdfd,Vb_y_mdfdは、リミット処理部100での出力値V_x_lim2,V_y_lim2の強制的な制限が行なわれなかった場合、すなわち、車輪体5のX軸方向及びY軸方向のそれぞれの移動速度を、それぞれ、重心速度定常偏差予測値Vb_x_prd,Vb_y_prdに一致させるように電動モータ31R,31Lを動作させても、電動モータ31R,31Lのそれぞれの回転角速度が許容範囲内に収まるような場合には、制御用目標重心速度Vb_x_mdfd,Vb_y_mdfdはいずれも“0”に決定される。従って、通常は、Vb_x_mdfd=Vb_y_mdfd=0である。
The control target center-of-gravity velocities Vb_x_mdfd and Vb_y_mdfd determined as described above are obtained when the output values V_x_lim2 and V_y_lim2 in the
一方、リミット処理部100の出力値Vw_x_lim2,Vw_y_lim2が、入力値Vb_x_t,Vb_y_tに対して強制的な制限を施して生成された場合、すなわち、車輪体5のX軸方向及びY軸方向のそれぞれの移動速度を、それぞれ、重心速度定常偏差予測値Vb_x_prd,Vb_y_prdに一致させるように電動モータ31R,31Lを動作させると、電動モータ31R,31Lのいずれかの回転角速度が許容範囲を逸脱してしまう場合(いずれかの回転角速度の絶対値が高くなり過ぎる場合)には、X軸方向については、リミット処理部100の出力値Vw_x_lim2の入力値Vb_x_prdからの修正量(=Vw_x_lim2−Vb_x_prd)が、X軸方向の制御用目標重心速度Vb_x_mdfdとして決定される。
On the other hand, when the output values Vw_x_lim2 and Vw_y_lim2 of the
また、Y軸方向については、リミット処理部100の出力値Vw_y_lim2の入力値Vb_y_prdからの修正量(=Vw_y_lim2−Vb_y_prd)が、Y軸方向の制御用目標重心速度Vb_y_mdfdとして決定される。
For the Y-axis direction, a correction amount (= Vw_y_lim2-Vb_y_prd) from the input value Vb_y_prd of the output value Vw_y_lim2 of the
この場合において、例えばX軸方向の速度に関し、制御用目標重心速度Vb_x_mdfdは、定常偏差算出部94_xが出力するX軸方向の重心速度定常偏差予測値Vb_x_prdと逆向きの速度となる。このことは、Y軸方向の速度に関しても同様である。 In this case, for example, regarding the speed in the X-axis direction, the control target center-of-gravity speed Vb_x_mdfd is a speed opposite to the X-axis direction center-of-gravity speed steady deviation predicted value Vb_x_prd output by the steady deviation calculating unit 94_x. The same applies to the speed in the Y-axis direction.
以上が、重心速度制限部76の処理である。
The above is the process of the gravity center
図9の説明に戻って、制御ユニット50は、以上の如く重心速度制限部76、ゲイン調整部78、及び偏差演算部70の処理を実行した後、次に、姿勢制御演算部80の処理を実行する。
Returning to the description of FIG. 9, the
この姿勢制御演算部80の処理を、以下に図13を参照して説明する。なお、図13において、括弧を付していない参照符号は、X軸方向に輪転する仮想車輪62_xの回転角速度の目標値である前記仮想車輪回転角速度指令ωw_x_cmdを決定する処理に係わる参照符号であり、括弧付きの参照符合は、Y軸方向に輪転する仮想車輪62_yの回転角速度の目標値である前記仮想車輪回転角速度指令ωw_y_cmdを決定する処理に係わる参照符号である。
The processing of the attitude
姿勢制御演算部80には、偏差演算部70で算出された基体傾斜角度偏差計測値θbe_xy_sと、前記STEP2で算出された基体傾斜角速度計測値θbdot_xy_sと、重心速度算出部72で算出された重心速度推定値Vb_xy_sと、重心速度制限部76で算出された制御用目標重心速度Vb_xy_mdfdと、ゲイン調整部78で算出された第1ゲイン調整パラメータKr1_xyと、前記STEP4で後述する如く決定される第2ゲイン調整パラメータKr2及び動作モードとが入力される。
The posture
そして、姿勢制御演算部80は、まず、上記の入力値を用いて、次式07x,07yにより、仮想車輪回転角加速度指令ωdotw_xy_cmdを算出する。
Then, the attitude
ωwdot_x_cmd=K1_x・θbe_x_s+K2_x・θbdot_x_s
+K3_x・(Vb_x_s−Vb_x_mdfd) ……式07x
ωwdot_y_cmd=K1_y・θbe_y_s+K2_y・θbdot_y_s
+K3_y・(Vb_y_s−Vb_y_mdfd) ……式07y
従って、本実施形態では、Y軸方向から見た倒立振子モデルの質点60_xの運動(ひいては、Y軸方向から見た車両系重心点の運動)を制御するための操作量(制御入力)としての仮想車輪回転角加速度指令ωdotw_x_cmdと、X軸方向から見た倒立振子モデルの質点60_yの運動(ひいては、X軸方向から見た車両系重心点の運動)を制御するための操作量(制御入力)としての仮想車輪回転角加速度指令ωdotw_y_cmdとは、それぞれ、3つの操作量成分(式07x,07yの右辺の3つの項)を加え合わせることによって決定される。
ωwdot_x_cmd = K1_x ・ θbe_x_s + K2_x ・ θbdot_x_s
+ K3_x ・ (Vb_x_s−Vb_x_mdfd) ...... Formula 07x
ωwdot_y_cmd = K1_y ・ θbe_y_s + K2_y ・ θbdot_y_s
+ K3_y · (Vb_y_s−Vb_y_mdfd) ...... Formula 07y
Therefore, in the present embodiment, as an operation amount (control input) for controlling the motion of the mass point 60_x of the inverted pendulum model viewed from the Y-axis direction (and hence the motion of the vehicle system center-of-gravity point viewed from the Y-axis direction). Virtual wheel rotation angular acceleration command ωdotw_x_cmd and operation amount (control input) for controlling the motion of the mass point 60_y of the inverted pendulum model viewed from the X-axis direction (and hence the motion of the center of gravity of the vehicle system viewed from the X-axis direction) The virtual wheel rotation angular acceleration command ωdotw_y_cmd is determined by adding three manipulated variable components (three terms on the right side of equations 07x and 07y).
この場合、式07xにおける各操作量成分に係わるゲイン係数K1_x,K2_x,K3_xは、第1ゲイン調整パラメータKr1_x、第2ゲイン調整パラメータKr2、及び動作モードに応じて可変的に設定される。同様に、式07yにおける各操作量成分に係わるゲイン係数K1_y,K2_y,K3_yは、第1ゲイン調整パラメータKr1_x、第2ゲイン調整パラメータKr2、及び動作モードに応じて可変的に設定される。以降、式07xにおけるゲイン係数K1_x,K2_x,K3_xのそれぞれを第1ゲイン係数K1_x、第2ゲイン係数K2_x、第3ゲイン係数K3_xということがある。このことは、式07yにおけるゲイン係数K1_y,K2_y,K3_yについても同様とする。 In this case, the gain coefficients K1_x, K2_x, K3_x related to each manipulated variable component in Expression 07x are variably set according to the first gain adjustment parameter Kr1_x, the second gain adjustment parameter Kr2, and the operation mode. Similarly, gain coefficients K1_y, K2_y, and K3_y related to each manipulated variable component in Expression 07y are variably set according to the first gain adjustment parameter Kr1_x, the second gain adjustment parameter Kr2, and the operation mode. Hereinafter, the gain coefficients K1_x, K2_x, and K3_x in Expression 07x may be referred to as a first gain coefficient K1_x, a second gain coefficient K2_x, and a third gain coefficient K3_x, respectively. The same applies to the gain coefficients K1_y, K2_y, and K3_y in Expression 07y.
式07xにおける第iゲイン係数Ki_x(i=1,2,3)と、式07yにおける第iゲイン係数Ki_y(i=1,2,3)とは、それぞれ、図13中に示した如く、次式09x、09yにより決定される。 The i-th gain coefficient Ki_x (i = 1, 2, 3) in Expression 07x and the i-th gain coefficient Ki_y (i = 1, 2, 3) in Expression 07y are as follows, as shown in FIG. It is determined by the expressions 09x and 09y.
Ki_x=(1−Wgain_x)・Ki_a_x + Wgain_x・Ki_b_x ……式09y
(i=1,2,3)
Ki_y=(1−Wgain_y)・Ki_a_y + Wgain_y・Ki_b_y ……式09y
(i=1,2,3)
この場合、式09xにおけるWgain_x、Ki_a_x、Ki_b_xと、式09yにおけるWgain_x、Ki_a_x、Ki_b_xとは、車両1の現在の動作モード(STEP4で決定される今回の動作モード)に応じて、次の(1)〜(4)に示す如く決定される。
Ki_x = (1−Wgain_x) · Ki_a_x + Wgain_x · Ki_b_x …… Formula 09y
(I = 1, 2, 3)
Ki_y = (1−Wgain_y) · Ki_a_y + Wgain_y · Ki_b_y …… Formula 09y
(I = 1, 2, 3)
In this case, Wgain_x, Ki_a_x, Ki_b_x in the expression 09x and Wgain_x, Ki_a_x, Ki_b_x in the expression 09y are the following (1 ) To (4).
(1)現在の動作モードが搭乗中モードである場合
Wgain_x=Kr1_x, Ki_a_x=Gi_x_搭乗中A(i=1,2,3)
Ki_b_x=Gi_x_搭乗中B(i=1,2,3)
Wgain_y=Kr1_y, Ki_a_y=Gi_y_搭乗中A(i=1,2,3)
Ki_b_y=Gi_y_搭乗中B(i=1,2,3)
(2)現在の動作モードが自立モードである場合
Wgain_x=Kr1_x, Ki_a_x=Gi_x_自立A(i=1,2,3)
Ki_b_x=Gi_x_自立B(i=1,2,3)
Wgain_y=Kr1_y, Ki_a_y=Gi_y_自立A(i=1,2,3)
Ki_b_y=Gi_y_自立B(i=1,2,3)
(3)現在の動作モードが搭乗行為用モードである場合
Wgain_x=Kr2, Ki_a_x=Gi_x_搭乗中A(i=1,2,3)
Ki_b_x=Gi_x_搭乗行為(i=1,2,3)
Wgain_y=Kr2, Ki_a_y=Gi_y_搭乗中A(i=1,2,3)
Ki_b_y=Gi_y_搭乗行為(i=1,2,3)
(4)現在の動作モードが降車行為用モードである場合
Wgain_x=Kr2, Ki_a_x=Gi_x_搭乗中A(i=1,2,3)
Ki_b_x=Gi_x_降車行為(i=1,2,3)
Wgain_y=Kr2, Ki_a_y=Gi_y_搭乗中A(i=1,2,3)
Ki_b_y=Gi_y_降車行為(i=1,2,3)
ここで、Gi_x_搭乗中A、Gi_x_搭乗中B、Gi_y_搭乗中A、Gi_y_搭乗中Bは搭乗モード用としてあらかじめ設定された所定値(定数値)、Gi_x_自立A、Gi_x_自立B、Gi_y_自立A、Gi_y_自立Bは自立モード用としてあらかじめ設定された所定値(定数値)、Gi_x_搭乗行為、Gi_y_搭乗行為は、搭乗行為用モード用としてあらかじめ設定された所定値(定数値)、Gi_x_降車行為、Gi_y_降車行為は、降車行為用モード用としてあらかじめ設定された所定値(定数値)である。
(1) When the current operation mode is the boarding mode Wgain_x = Kr1_x, Ki_a_x = Gi_x_boarding A (i = 1, 2, 3)
Ki_b_x = Gi_x_ Boarding B (i = 1, 2, 3)
Wgain_y = Kr1_y, Ki_a_y = Gi_y_ boarding A (i = 1, 2, 3)
Ki_b_y = Gi_y_ Boarding B (i = 1, 2, 3)
(2) When the current operation mode is the independent mode Wgain_x = Kr1_x, Ki_a_x = Gi_x_independent A (i = 1, 2, 3)
Ki_b_x = Gi_x_independent B (i = 1, 2, 3)
Wgain_y = Kr1_y, Ki_a_y = Gi_y_independent A (i = 1, 2, 3)
Ki_b_y = Gi_y_independent B (i = 1, 2, 3)
(3) When the current operation mode is the mode for boarding action Wgain_x = Kr2, Ki_a_x = Gi_x_During boarding A (i = 1, 2, 3)
Ki_b_x = Gi_x_ boarding action (i = 1, 2, 3)
Wgain_y = Kr2, Ki_a_y = Gi_y_ boarding A (i = 1, 2, 3)
Ki_b_y = Gi_y_ boarding action (i = 1, 2, 3)
(4) When the current operation mode is the mode for getting off Wgain_x = Kr2, Ki_a_x = Gi_x_During boarding A (i = 1, 2, 3)
Ki_b_x = Gi_x_Get-off action (i = 1, 2, 3)
Wgain_y = Kr2, Ki_a_y = Gi_y_ boarding A (i = 1, 2, 3)
Ki_b_y = Gi_y_Getting off (i = 1,2,3)
Here, Gi_x_boarding A, Gi_x_boarding B, Gi_y_boarding A, Gi_y_boarding B are predetermined values (constant values) preset for the boarding mode, Gi_x_independent A, Gi_x_independent B, Gi_y_self-supporting A, Gi_y_self-supporting B are predetermined values (constant values) set in advance for the self-supporting mode, Gi_x_ boarding action, Gi_y_ boarding action are predetermined values set in advance for the boarding action mode (Constant value), Gi_x_Get-off action, Gi_y_Get-off action are predetermined values (constant values) set in advance for the get-off action mode.
この場合、本実施形態では、|Gi_x_搭乗中A|<|Gi_x_搭乗中B|、|Gi_y_搭乗中A|<|Gi_y_搭乗中B|、|Gi_x_自立A|<|Gi_x_自立B|、|Gi_y_自立A|<|Gi_y_自立B|、|Gi_x_搭乗行為|<|Gi_x_搭乗中A|、|Gi_y_搭乗行為|<|Gi_y_搭乗中A|、|Gi_x_降車行為|<|Gi_x_搭乗中A|、|Gi_y_降車行為|<|Gi_y_搭乗中A|となっている。また、|Gi_x_自立A|<|Gi_x_搭乗中A|、|Gi_y_自立A|<|Gi_y_搭乗中A|となっている。 In this case, in this embodiment, | Gi_x_boarding A | <| Gi_x_boarding B |, | Gi_y_boarding A | <| Gi_y_boarding B |, | Gi_x_independent A | <| Gi_x_ Self-standing B |, | Gi_y_self-supporting A | <| Gi_y_self-supporting B |, | Gi_x_ boarding action | <| Gi_x_ boarding A |, | Gi_y_ boarding action | <| Gi_y_ boarding A |, | Gi_x _Get-off action | <| Gi_x_Aboarding A |, | Gi_y_Get-off action | <| Gi_y_Aboarding A |. Also, | Gi_x_self-supporting A | <| Gi_x_boarding A |, | Gi_y_self-supporting A | <| Gi_y_boarding A |.
なお、本実施形態では、Gi_x_搭乗行為=Gi_x_降車行為、Gi_y_搭乗行為=Gi_y_降車行為とされている。ただし、Gi_x_搭乗行為≠Gi_x_降車行為、又は、Gi_y_搭乗行為≠Gi_y_降車行為であってもよい。 In this embodiment, Gi_x_boarding action = Gi_x_getting off action, Gi_y_boarding action = Gi_y_getting off action. However, Gi_x_ boarding action ≠ Gi_x_ getting off action or Gi_y_ boarding action ≠ Gi_y_ getting off action may be used.
動作モードが搭乗中モードである場合には、式07xの演算に用いる各第iゲイン係数Ki_x(i=1,2,3)は、それぞれに対応する2つの定数値Gi_x_搭乗中A,Gi_x_搭乗中Bの重み付き平均値して決定される。そして、この場合、Ki_a_x(=Gi_x_搭乗中A)、Ki_b_x(=Gi_x_搭乗中B)にそれぞれ掛かる重み(1−Wgain),Wgainが、第1ゲイン調整パラメータKr1_xに応じて変化させられる。具体的には、Kr1_x=0である場合には、Ki_x=Gi_x_搭乗中Aとなり、Kr1_x=1である場合には、Ki_x=Gi_x_搭乗中Bとなる。そして、Kr1_xが“0”から“1”に近づくに伴い、第iゲイン係数Ki_xはKi_x=Gi_x_搭乗中AからGi_x_搭乗中Bに近づいていく(Ki_xの絶対値が増加していく)。搭乗中モードでは、式07yの演算に用いる各第iゲイン係数Ki_y(i=1,2,3)についても上記と同様である。 When the operation mode is the boarding mode, each i-th gain coefficient Ki_x (i = 1, 2, 3) used in the calculation of Expression 07x is set to two constant values Gi_x_boarding A, Gi_x. _Determined as the weighted average value of B during boarding. In this case, the weight (1-Wgain) and Wgain applied to Ki_a_x (= Gi_x_boarding A) and Ki_b_x (= Gi_x_boarding B) are changed according to the first gain adjustment parameter Kr1_x. Specifically, when Kr1_x = 0, Ki_x = Gi_x_boarding A, and when Kr1_x = 1, Ki_x = Gi_x_boarding B. As Kr1_x approaches “1” from “0”, the i-th gain coefficient Ki_x approaches from Ki_x = Gi_x_boarding A to Gi_x_boarding B (the absolute value of Ki_x increases). . In the boarding mode, the same applies to each i-th gain coefficient Ki_y (i = 1, 2, 3) used in the calculation of Expression 07y.
また、動作モードが自立モードである場合には、式07xの演算に用いる各第iゲイン係数Ki_x(i=1,2,3)は、それぞれに対応する2つの定数値Gi_x_自立A,Gi_x_自立Bの重み付き平均値して決定される。そして、この場合、Ki_a_x(=Gi_x_自立A)、Ki_b_x(=Gi_x_自立B)にそれぞれ掛かる重み(1−Wgain),Wgainが、第1ゲイン調整パラメータKr1_xに応じて変化させられる。具体的には、Kr1_x=0である場合には、Ki_x=Gi_x_自立Aとなり、Kr1_x=1である場合には、Ki_x=Gi_x_自立Bとなる。そして、Kr1_xが“0”から“1”に近づくに伴い、第iゲイン係数Ki_xはKi_x=Gi_x_自立AからGi_x_自立Bに近づいていく(Ki_xの絶対値が増加していく)。自立モードでは、式07yの演算に用いる各第iゲイン係数Ki_y(i=1,2,3)についても上記と同様である。 Further, when the operation mode is the self-supporting mode, each i-th gain coefficient Ki_x (i = 1, 2, 3) used in the calculation of the expression 07x has two constant values Gi_x_self-supporting A, Gi_x corresponding thereto. _Determined as a weighted average value of self-supporting B In this case, the weight (1-Wgain) and Wgain applied to Ki_a_x (= Gi_x_independent A) and Ki_b_x (= Gi_x_independent B) are changed according to the first gain adjustment parameter Kr1_x. Specifically, when Kr1_x = 0, Ki_x = Gi_x_independent A, and when Kr1_x = 1, Ki_x = Gi_x_independent B. As Kr1_x approaches “1” from “0”, the i-th gain coefficient Ki_x approaches from Ki_x = Gi_x_independent A to Gi_x_independent B (the absolute value of Ki_x increases). In the self-supporting mode, the same applies to each i-th gain coefficient Ki_y (i = 1, 2, 3) used in the calculation of Expression 07y.
補足すると、第1ゲイン調整パラメータKr1_x,Kr1_yは、前記したように、通常は(詳しくはゲイン調整部78のリミット処理部86での出力値Vw_x_lim1,Vw_y_lim1の強制的な制限が行なわれなかった場合)、“0”である。従って、搭乗中モード及び自立モードにおける第iゲイン係数Ki_x,Ki_y(i=1,2,3)は、通常は、それぞれ、Ki_x=Ki_a_x(=Gi_x_搭乗中A又はGi_x_自立A)、Ki_y=Ki_a_y(=Gi_y_搭乗中A又はGi_y_自立A)となる。従って、Gi_x_搭乗中A,Gi_y_搭乗中Aは、搭乗中モードでの通常的な車両1の動作状態での第iゲイン係数Ki_x,Ki_y(i=1,2,3)の適切な値としてあらかじめ設定された定数値である。同様に、Gi_x_自立A,Gi_y_自立Aは、自立モードでの通常的な車両1の動作状態での第iゲイン係数Ki_x,Ki_y(i=1,2,3)の適切な値としてあらかじめ設定された定数値である。
Supplementally, as described above, the first gain adjustment parameters Kr1_x and Kr1_y are normally (specifically, when the output values Vw_x_lim1 and Vw_y_lim1 in the
一方、動作モードが搭乗行為用モードである場合には、式07xの演算に用いる各第iゲイン係数Ki_x(i=1,2,3)は、それぞれに対応する2つ定数値Gi_x_搭乗中A,Gi_x_搭乗行為の重み付き平均値して決定される。そして、この場合、Ki_a_x(=Gi_x_搭乗中A)、Ki_b_x(=Gi_x_搭乗行為)にそれぞれ掛かる重み(1−Wgain),Wgainが、第2ゲイン調整パラメータKr2に応じて変化させられる。具体的には、Kr2_x=0である場合には、Ki_x=Gi_x_搭乗中Aとなり、Kr2_x=1である場合には、Ki_x=Gi_x_搭乗行為となる。そして、Kr2が“1”から“0”に近づくに伴い、第iゲイン係数Ki_xはKi_x=Gi_x_搭乗行為からGi_x_搭乗中Aに近づいていく。ひいては、Ki_xの絶対値が増加していく。この場合、|Gi_x_搭乗行為|<|Gi_x_搭乗中A|であるから、Kr2=0である場合を除き、搭乗行為用モードでの各第iゲイン係数Ki_x(i=1,2,3)の絶対値は、搭乗中モードよりも小さい値となる。搭乗行為用モードでは、式07yの演算に用いる各第iゲイン係数Ki_y(i=1,2,3)についても上記と同様である。 On the other hand, when the operation mode is the mode for boarding action, each i-th gain coefficient Ki_x (i = 1, 2, 3) used for the calculation of Expression 07x is two constant values Gi_x_ during boarding. A, Gi_x_ is determined as a weighted average value of boarding action. In this case, the weight (1-Wgain) and Wgain applied to Ki_a_x (= Gi_x_during boarding A) and Ki_b_x (= Gi_x_boarding action) are changed according to the second gain adjustment parameter Kr2. Specifically, Ki_x = Gi_x_boarding A when Kr2_x = 0, and Ki_x = Gi_x_boarding action when Kr2_x = 1. As Kr2 approaches “0” from “1”, the i-th gain coefficient Ki_x approaches from Gi_x = Gi_x_boarding action to Gi_x_during boarding A. As a result, the absolute value of Ki_x increases. In this case, since | Gi_x_boarding action | <| Gi_x_ during boarding A |, each i-th gain coefficient Ki_x (i = 1, 2, 3) in the mode for boarding action except for Kr2 = 0. The absolute value of) is smaller than that in boarding mode. In the boarding action mode, the same applies to the i-th gain coefficient Ki_y (i = 1, 2, 3) used for the calculation of Expression 07y.
また、動作モードが降車行為用モードである場合には、式07xの演算に用いる各第iゲイン係数Ki_x(i=1,2,3)は、それぞれに対応する2つ定数値Gi_x_搭乗中A,Gi_x_降車行為Bの重み付き平均値して決定される。そして、この場合、Ki_a_x(=Gi_x_搭乗中A)、Ki_b_x(=Gi_x_降車行為)にそれぞれ掛かる重み(1−Wgain),Wgainが、第2ゲイン調整パラメータKr2に応じて変化させられる。具体的には、Kr2_x=0である場合には、Ki_x=Gi_x_搭乗中Aとなり、Kr2_x=1である場合には、Ki_x=Gi_x_降車行為となる。そして、Kr2が“1”から“0”に近づくに伴い、第iゲイン係数Ki_xはKi_x=Gi_x_降車行為からGi_x_搭乗中Aに近づいていく。ひいては、Ki_xの絶対値が増加していく。この場合、|Gi_x_降車行為|<|Gi_x_搭乗中A|であるから、Kr2=0である場合を除き、搭乗行為用モードでの各第iゲイン係数Ki_x(i=1,2,3)の絶対値は、搭乗中モードよりも小さい値となる。降車行為用モードでは、式07yの演算に用いる各第iゲイン係数Ki_y(i=1,2,3)についても上記と同様である。 Further, when the operation mode is the mode for getting off the vehicle, each i-th gain coefficient Ki_x (i = 1, 2, 3) used in the calculation of the expression 07x has two constant values Gi_x_ during boarding. A, Gi_x_Get-off action B is determined as a weighted average value. In this case, Ki_a_x (= Gi_x_Aboarding A), Ki_b_x (= Gi_x_Get-off action), the weight (1-Wgain) and Wgain, respectively, are changed according to the second gain adjustment parameter Kr2. Specifically, when Kr2_x = 0, Ki_x = Gi_x_boarding A, and when Kr2_x = 1, Ki_x = Gi_x_get-off action. As Kr2 approaches “0” from “1”, the i-th gain coefficient Ki_x approaches from Gi_x = Gi_x_get-off action to Gi_x_During boarding A. As a result, the absolute value of Ki_x increases. In this case, | Gi_x_getting-off action | <| Gi_x_during boarding A |, so that each i-th gain coefficient Ki_x (i = 1, 2, 3) in the boarding action mode except for Kr2 = 0. The absolute value of) is smaller than that in boarding mode. In the mode for getting off, each i-th gain coefficient Ki_y (i = 1, 2, 3) used in the calculation of Expression 07y is the same as described above.
姿勢制御演算部80は、上記の如く決定した第1〜第3ゲイン係数K1_x,K2_x,K3_xを用いて前記式07xの演算を行なうことで、X軸方向に輪転する仮想車輪62_xに係わる仮想車輪回転角加速度指令ωwdot_x_cmdを算出する。
The attitude
さらに詳細には、図13を参照して、姿勢制御演算部80は、基体傾斜角度偏差計測値θbe_x_sに第1ゲイン係数K1_xを乗じてなる操作量成分u1_xと、基体傾斜角速度計測値θbdot_x_sに第2ゲイン係数K2_xを乗じてなる操作量成分u2_xとをそれぞれ、処理部80a,80bで算出する。さらに、姿勢制御演算部80は、重心速度推定値Vb_x_sと制御用目標重心速度Vb_x_mdfdとの偏差(=Vb_x_s−Vb_x_mdfd)を演算部80dで算出し、この偏差に第3ゲイン係数K3_xを乗じてなる操作量成u3_xを処理部80cで算出する。そして、姿勢制御演算部80は、これらの操作量成分u1_x,u2_x,u3_xを演算部80eにて加え合わせることにより、仮想車輪回転角加速度指令ωwdot_x_cmdを算出する。
In more detail, with reference to FIG. 13, the posture
同様に、姿勢制御演算部80は、上記の如く決定した第1〜第3ゲイン係数K1_y,K2_y,K3_yを用いて前記式07yの演算を行なうことで、Y軸方向に輪転する仮想車輪62_yに係わる仮想車輪回転角加速度指令ωwdot_y_cmdを算出する。
Similarly, the posture
この場合には、姿勢制御演算部80は、基体傾斜角度偏差計測値θbe_y_sに第1ゲイン係数K1_yを乗じてなる操作量成分u1_yと、基体傾斜角速度計測値θbdot_y_sに第2ゲイン係数K2_yを乗じてなる操作量成分u2_yとをそれぞれ、処理部80a,80bで算出する。さらに、姿勢制御演算部80は、重心速度推定値Vb_y_sと制御用目標重心速度Vb_y_mdfdとの偏差(=Vb_y_s−Vb_y_mdfd)を演算部80dで算出し、この偏差に第3ゲイン係数K3_yを乗じてなる操作量成u3_yを処理部80cで算出する。そして、姿勢制御演算部80は、これらの操作量成分u1_y,u2_y,u3_yを演算部80eにて加え合わせることにより、仮想車輪回転角加速度指令ωwdot_x_cmdを算出する。
In this case, the posture
ここで、式07xの右辺の第1項(=第1操作量成分u1_x)及び第2項(=第2操作量成分u2_x)は、X軸周り方向での基体傾斜角度偏差計測値θbe_x_sを、フィードバック制御則としてのPD則(比例・微分則)により“0”に収束させる(基体傾斜角度計測値θb_x_sを目標値θb_x_objに収束させる)ためのフィードバック操作量成分としての意味を持つ。 Here, the first term (= the first manipulated variable component u1_x) and the second term (= the second manipulated variable component u2_x) on the right side of the expression 07x are the body tilt angle deviation measured values θbe_x_s in the direction around the X axis, It has a meaning as a feedback manipulated variable component for converging to “0” (converging the base body tilt angle measurement value θb_x_s to the target value θb_x_obj) by the PD law (proportional / differential law) as a feedback control law.
また、式07xの右辺の第3項(=第3操作量成分u3_x)は、重心速度推定値Vb_x_sと制御用目標重心速度Vb_x_mdfdとの偏差をフィードバック制御則としての比例則により“0”に収束させる(Vb_x_sをVb_x_mdfdに収束させる)ためのフィードバック操作量成分としての意味を持つ。 In addition, the third term (= third manipulated variable component u3_x) on the right side of Expression 07x converges to “0” by the proportional law as the feedback control law for the deviation between the center of gravity speed estimated value Vb_x_s and the control target center of gravity speed Vb_x_mdfd. It has a meaning as a feedback manipulated variable component for causing Vb_x_s to converge to Vb_x_mdfd.
これらのことは、式07yの右辺の第1〜第3項(第1〜第3操作量成分u1_y,u2_y,u3_y)についても同様である。 The same applies to the first to third terms (first to third manipulated variable components u1_y, u2_y, u3_y) on the right side of Expression 07y.
なお、前記したように通常は(より詳しくは、前記重心速度制限部76のリミット処理部100での出力値V_x_lim2,V_y_lim2の強制的な制限が行なわれなかった場合)、制御用目標重心速度Vb_x_mdfd,Vb_y_mdfdは“0”である。そして、Vb_x_mdfd=Vb_y_mdfd=0となる通常の場合は、第3操作量成分u3_x,u3_yは、それぞれ、重心速度推定値Vb_x_s,Vb_y_sに第3ゲイン係数K3_x,K3_yを乗じた値に一致する。
Normally, as described above (more specifically, when the output values V_x_lim2 and V_y_lim2 are not forcibly limited by the
姿勢制御演算部80は、上記の如く、仮想車輪回転角加速度指令ωwdot_x_cmd,ωwdot_y_cmdを算出した後、次に、これらのωwdot_x_cmd,ωwdot_y_cmdをそれぞれ積分器80fにより積分することによって、前記仮想車輪回転速度指令ωw_x_cmd,ωw_y_cmdを決定する。
After calculating the virtual wheel rotation angular acceleration commands ωwdot_x_cmd and ωwdot_y_cmd as described above, the attitude
以上が姿勢制御演算部80の処理の詳細である。
The above is the details of the processing of the attitude
補足すると、式07xの右辺の第3項を、Vb_x_sに応じた操作量成分(=K3_x・Vb_x_s)と、Vb_x_mdfdに応じた操作量成分(=−K3_x・Vb_x_mdfd)とに分離した式によって、仮想車輪回転角加速度指令ωdotw_x_cmdを算出するようにしてよい。同様に、式07yの右辺の第3項を、Vb_y_sに応じた操作量成分(=K3_y・Vb_y_s)と、Vb_y_mdfdに応じた操作量成分(=−K3_y・Vb_y_mdfd)とに分離した式によって、仮想車輪回転角加速度指令ωdotw_y_cmdを算出するようにしてよい。 Supplementally, the third term on the right side of the expression 07x is virtually divided into an operation amount component (= K3_x · Vb_x_s) according to Vb_x_s and an operation amount component (= −K3_x · Vb_x_mdfd) according to Vb_x_mdfd The wheel rotation angular acceleration command ωdotw_x_cmd may be calculated. Similarly, the third term on the right side of Expression 07y is divided into an operation amount component (= K3_y · Vb_y_s) according to Vb_y_s and an operation amount component (= −K3_y · Vb_y_mdfd) according to Vb_y_mdfd, The wheel rotation angular acceleration command ωdotw_y_cmd may be calculated.
また、本実施形態では、車両系重心点の挙動を制御するための操作量(制御入力)として、仮想車輪62_x,62_yの回転角加速度指令ωw_x_cmd,ωw_y_cmdを用いるようにしたが、例えば、仮想車輪62_x,62_yの駆動トルク、あるいは、この駆動トルクを各仮想車輪62_x,62_yの半径Rw_x,Rw_yで除算してなる並進力(すなわち仮想車輪62_x,62_yと床面との間の摩擦力)を操作量として用いるようにしてもよい。 In the present embodiment, the rotational angular acceleration commands ωw_x_cmd and ωw_y_cmd of the virtual wheels 62_x and 62_y are used as the operation amount (control input) for controlling the behavior of the vehicle system center-of-gravity point. The driving torque of 62_x, 62_y or a translational force obtained by dividing this driving torque by the radii Rw_x, Rw_y of the virtual wheels 62_x, 62_y (that is, the frictional force between the virtual wheels 62_x, 62_y and the floor surface) is manipulated. It may be used as a quantity.
図9の説明に戻って、制御ユニット50は、次に、姿勢制御演算部80で上記の如く決定した仮想車輪回転速度指令ωw_x_cmd,ωw_y_cmdをモータ指令演算部82に入力し、該モータ指令演算部82の処理を実行することによって、電動モータ31Rの速度指令ω_R_cmdと電動モータ31Lの速度指令ω_L_cmdとを決定する。このモータ指令演算部82の処理は、前記リミット処理部86(図11参照)のXY−RL変換部86bの処理と同じである。
Returning to the description of FIG. 9, the
具体的には、モータ指令演算部82は、前記式01a,01bのωw_x,ωw_y,ω_R,ω_Lをそれぞれ、ωw_x_cmd,ωw_y_cmd,ω_R_cmd,ω_L_cmdに置き換えて得られる連立方程式を、ω_R_cmd,ω_L_cmdを未知数として解くことによって、電動モータ31R,31Lのそれぞれの速度指令ω_R_cmd,ω_L_cmdを決定する。
Specifically, the motor
以上により前記STEP9の車両制御演算処理が完了する。
Thus, the vehicle control calculation process of
次に、説明を後回しにした前記STEP4の処理(制御特性パラメータの決定処理)を図14〜図19を参照して詳細に説明する。 Next, the processing of STEP 4 (control characteristic parameter determination processing) that has been described later will be described in detail with reference to FIGS.
STEP4の処理は、図14のフローチャートに示す如く実行される。 The process of STEP 4 is executed as shown in the flowchart of FIG.
具体的には、制御ユニット50は、まず、STEP11において、今回の(今回の制御処理周期での)動作モードがどの動作モードであるかを判断する。
Specifically, the
ここで、本実施形態では、制御ユニット50の起動時において、制御ユニット50は、車両1の初期動作モードとして、自立モードを設定する。そして、制御ユニット50は、以後の各制御処理周期において、次回の制御処理周期での動作モードを決定する。従って、STEP11で判断される動作モードは、基本的には、前回の制御処理周期で決定された動作モードである。
Here, in the present embodiment, when the
STEP11において、今回の動作モードが自立モードである場合、搭乗中モードである場合、搭乗行為用モードである場合、降車行為用モードである場合のそれぞれの場合に対応して、制御ユニット50は、それぞれ、STEP12,13,14,15の処理を実行することによって、次回の動作モードや、制御特性パラメータの今回値を決定する。これにより図14の処理が終了する。
In
今回の動作モードが自立モードである場合に対応するSTEP12の処理は、図15のフローチャートに示すサブルーチン処理により実行される。
The processing of
この処理では、制御ユニット50は、まず、前記STEP3で取得した搭乗/降車用操作子58の出力に基づいて、該操作子58の搭乗用操作部58aがON操作(押し操作)されたか否かをSTEP12−1で判断する。
In this process, the
この判断結果が否定的である場合には、STEP12−2に進んで、制御ユニット50は、次回の動作モードを現在の動作モード(=自立モード)に保持する。また、STEP12−1の判断結果が肯定的である場合(乗員がこれから車両1に搭乗しようとして、搭乗用操作部58aをON操作した場合)には、制御ユニット50は、次回の動作モードを搭乗行為用モードに変更する。
When the determination result is negative, the process proceeds to STEP 12-2, and the
次いで、制御ユニット50は、STEP12−4において、第2ゲイン調整パラメータKr2の値を“0”にする(初期化する)。さらに、制御ユニット50は、STEP12−5において、基体傾斜角度目標値θb_x_obj,θb_y_objとして、自立モード用の設定値θb_x_自立を設定する。これにより図15の処理が終了する。
Next, in STEP 12-4, the
以上の処理により、STEP11で判断する今回の動作モードが自立モードに設定されている場合には、基体傾斜角度目標値θb_x_obj,θb_y_objとして、自立モード用の設定値θb_x_自立が設定される。そして、搭乗/降車用操作子58の搭乗用操作部58aがON操作された場合に、次回の制御処理周期での動作モードが搭乗行為用モードに変更される。
With the above processing, when the current operation mode determined in
次に、今回の動作モードが搭乗中モードである場合に対応するSTEP13の処理は、図16のフローチャートに示すサブルーチン処理により実行される。
Next, the processing of
この処理では、制御ユニット50は、まず、前記STEP3で取得した搭乗/降車用操作子58の出力に基づいて、該操作子58の降車用操作部58bがON操作(押し操作)されたか否かをSTEP13−1で判断する。
In this process, the
この判断結果が否定的である場合には、STEP13−2に進んで、制御ユニット50は、次回の動作モードを現在の動作モード(=搭乗中モード)に保持する。また、STEP13−1の判断結果が肯定的である場合(乗員が車両1から降車しようとして、降車用操作部58bをON操作した場合)には、制御ユニット50は、次回の動作モードを降車行為用モードに変更する。
When this determination result is negative, the process proceeds to STEP 13-2, and the
次いで、制御ユニット50は、STEP13−4において、第2ゲイン調整パラメータKr2の値を“0”にする(初期化する)。さらに、制御ユニット50は、STEP13−5において、基体傾斜角度目標値θb_x_obj,θb_y_objとして、搭乗中モード用の設定値θb_x_搭乗中を設定する。これにより、図16の処理が終了する。
Next, the
以上の処理により、STEP11で判断する今回の動作モードが搭乗中モードに設定されている場合には、基体傾斜角度目標値θb_x_obj,θb_y_objとして、搭乗中モード用の設定値θb_x_搭乗中が設定される。そして、搭乗/降車用操作子58の降車用操作部58bがON操作された場合に、次回の制御処理周期での動作モードが降車行為用モードに変更される。
Through the above processing, when the current operation mode determined in
次に、今回の動作モードが搭乗行為用モードである場合に対応するSTEP14の処理は、図17及び図18のフローチャートに示すサブルーチン処理により実行される。 Next, the processing of STEP 14 corresponding to the case where the current operation mode is the boarding action mode is executed by the subroutine processing shown in the flowcharts of FIGS. 17 and 18.
この処理では、制御ユニット50は、まず、前記STEP3で取得した搭乗/降車用操作子58の出力に基づいて、該操作子58の降車用操作部58bがON操作(押し操作)されたか否かをSTEP13−1で判断する。そして、この判断結果が肯定的である場合には、制御ユニット50は、図18の処理を実行する。
In this process, the
具体的には、制御ユニット50は、前回の動作モードが搭乗行為用モードであるか否かをSTEP14−20で判断する。
Specifically, the
この判断結果が否定的となる場合は、前回の動作モードが自立モードであり、その自立モードにおいて乗員が誤って搭乗/降車用操作子58の搭乗用操作部58aを操作してしまったような状況である。この場合には、制御ユニット50は、STEP14−21において、今回の動作モードを強制的に搭乗行為用モードから自立モードに変更する。
If this determination result is negative, the previous operation mode is the self-sustained mode, and the occupant mistakenly operates the boarding operation unit 58a of the boarding /
そして、制御ユニット50は、STEP14−22,14−23,14−24で、それぞれ、第2ゲイン調整パラメータKr2の値を“0”にすることと、基体傾斜角度目標値θb_xy_objとして、自立モード用の設定値θb_xy_自立を設定することと、次回の動作モードを自立モードにすることとを実行する。
Then, in STEP14-22, 14-23, and 14-24, the
また、STEP14−20の判断結果が肯定的となる場合は、搭乗行為用モードの途中で乗員が搭乗行為を中止して、降車しようとする状況である。この場合には、制御ユニット50は、STEP14−26,14−27,14−28で、それぞれ、第2ゲイン調整パラメータKr2の値を前回値に保持することと、基体傾斜角度基本値θb_xy_objを前回値に保持することと、次回の動作モードを降車行為用モードにすることとを実行する。なお、この場合には、今回の動作モードは、搭乗行為用モードに保持される。
Further, when the determination result in STEP14-20 is affirmative, the occupant cancels the boarding action in the middle of the boarding action mode and gets off the vehicle. In this case, the
上記の如くSTEP14−24又はSTEP14−28の処理を実行した後、制御ユニット50は、次にSTEP14−25において、後述するフラグFlagの値を“0”にする。これにより、図17及び図18の処理が終了する。
After executing the processing of STEP14-24 or STEP14-28 as described above, the
図17の説明に戻って、STEP14−1の判断結果が否定的である場合には、制御ユニット50は、次に、前記STEP3で取得した荷重センサ54R,54Lの出力に基づいて、左右の両ステップ3R,3LがON状態であるか否かをSTEP14−2で判断する。
Returning to the description of FIG. 17, when the determination result of STEP 14-1 is negative, the
なお、右側のステップ3RがON状態であるということは、本実施形態では、該ステップ3Rの荷重センサ54Rの出力が示す荷重検出値が所定値を超えている状態を意味し、この状態は、換言すれば、該ステップ3Rに乗員の足が載せられている状態である。そして、ステップ3RがOFF状態であるということは、ステップ3Rに実質的に足が載せられていない(乗員の体重がステップ3Rにかかっていない)状態を意味する。このことは、左側のステップ3LのON状態、OFF状態についても同様である。
In this embodiment, the fact that the
STEP14−2の判断結果が否定的である場合は、搭乗行為用モードでの実際の搭乗行為を乗員がこれから開始しようとする状況で、ステップ3R,3Lのいずれにも未だ、乗員の足が載せられていない状況であるか、又は、実際の搭乗行為の途中で、乗員がその一方の足をステップ3R又は3Lに載せた状況である。
If the determination result in STEP 14-2 is negative, the passenger is about to start the actual boarding action in the boarding action mode, and the feet of the passenger are still on both
この場合には、制御ユニット50は、両ステップ3R,3LがOFF状態であるか否か、すなわち、ステップ3R,3Lのいずれにも未だ、乗員の足が載せられていない状況であるかをSTEP14−3で判断する。
In this case, the
そして、この判断結果が肯定的である場合には、制御ユニット50は、STEP14−13において、基体傾斜角度目標値θb_xy_objを調整するための重み係数Wthの値を“0”にすると共に、第2ゲイン調整パラメータKr2の値を“1”にする。さらに制御ユニット50は、STEP14−14において、後述するフラグFlagの値を“0”にする。なお、本実施形態では、重み係数Wthは、搭乗行為用モード又は降車行為用モードにおいて、“−1”から“1”までの範囲内で可変的に決定される値である。
If the determination result is affirmative, the
次いで、制御ユニット50は、STEP14−11において、次回の動作モードを現在の動作モード(=搭乗行為用モード)に保持する。さらに、制御ユニット50は、STEP14−12において、重み係数Wthに応じて基体傾斜角度目標値θb_xy_objを決定し、図17の処理を終了する。なお、STEP14−12の処理の詳細は後述する。
Next, the
前記STEP14−3の判断結果が否定的である場合は、搭乗行為の開始時又はその直後において、ステップ3R,3Lのうちのいずれか一方に、乗員がその一方の足を載せている状態である。この場合には、制御ユニット50は、前回の動作モードが搭乗行為用モードであるか否かをSTEP14−4で判断する。
If the determination result in STEP 14-3 is negative, the passenger is placing one foot on either one of
この判断結果が否定的となる場合は、前記の動作モードが自立モードである場合であり、自立モードから搭乗行為用モードに移行して即座に、ステップ3R,3Lのうちのいずれか一方に、乗員がその一方の足を最初に載せた状況である。この場合には、制御ユニット50は、次に右側のステップ3RがON状態であるか否か、すなわち、ステップ3R,3Lのうちの右側のステップ3Rのみに乗員の足(右足)が載せられているか否かをSTEP14−6で判断する。そして、この判断結果が肯定的である場合には、制御ユニット50は、STEP14−7で重み係数Wthの値を“1”とする。また、STEP14−6の判断結果が否定的である場合(左側のステップ3Lのみに乗員の足(左足)が載せられている場合)には、制御ユニット50は、STEP14−7で重み係数Wthの値を“−1”とする。
When this determination result is negative, the operation mode is a self-supporting mode, and immediately after the transition from the self-supporting mode to the boarding action mode, either one of
ここで、補足すると、本実施形態の車両1では、搭乗行為において、乗員は、基本的には、まず、その片足をステップ3R,3Lの一方3R又は3Lに載せ、この状態で、他方の足を素早く離床させて他方のステップ3L又は3Rに載せる。この時、例えば、乗員の右足をステップ3Rの載せた状態で、基体9が乗員の右側に傾いていると、左足を離床させた瞬間に、ステップ3Rが乗員から受ける荷重によって基体9がさらに右傾して、円滑な搭乗が困難となる。このため、乗員の右足をステップ3Rの載せた状態から車両1に搭乗する場合には、乗員は、基本的には、まず、右足をステップ3Rに載せたまま基体9を左側にある程度傾ける。そして、乗員は、この状態で、左足を離床させて該左足をステップ3Lに載せる。このような搭乗行為は、乗員がその左足をステップ3Lに載せた状態から車両1に搭乗する場合も同様である。
Here, supplementally, in the
なお、降車行為においても、上記と同様の理由によって、乗員がステップ3R又は3Lに一方の足を載せたまま、他方の足をステップ3L又は3Rから離脱させる際には、その離脱させる足と同じ側に、基体9を傾けることが望ましい。
In the case of getting off, for the same reason as above, when the occupant leaves one foot on
このようなことから、本実施形態では、制御ユニット50は、搭乗行為中、又は降車行為中において、X軸周り方向での基体傾斜角度目標値θb_y_objとして、基体9を搭乗中モードでの基体傾斜角度目標値θb_y_obj(=θb_y_搭乗中)に対応する姿勢よりも、乗員の右側及び左側のいずれか一方側に傾けた姿勢(ステップ3R,3Lの並列方向が水平方向に対して傾斜した方向となる姿勢)での角度値を設定する。そして、本実施形態では、基体9を左側に傾ける場合における上記重み係数Wthの極性を正極性、基体9を右側に傾ける場合における上記重み係数Wthの極性を負極性としている。
For this reason, in the present embodiment, the
従って、STEP14−6の判断結果が肯定的である場合(右側のステップ3Rのみに乗員の足(右足)が載せられている場合)には、基体9を左側に傾けるべく、重み係数WthがSTEP14−7において、正極性の値に決定される。また、STEP14−6の判断結果が否定的である場合(左側のステップ3Lのみに乗員の足(右足)が載せられている場合)には、基体9を右側に傾けるべく、重み係数WthがSTEP14−8において、負極性に決定される。
Therefore, when the determination result of STEP 14-6 is affirmative (when the occupant's foot (right foot) is placed only on the
補足すると、本実施形態の構造の車両1では、ステップ3R,3Lの並列方向が水平方向となるような基体9の姿勢から、該基体9を左側に傾けることによって、右側ステップ3R(より詳しくはステップ3Rの右足との接触部位)と、車輪体5の接地部(X軸周りでの足載せ部3及び基体9の傾動中心)との水平距離(X軸方向での距離)が、ステップ3R,3Lの並列方向が水平方向となる状態での当該水平距離よりも小さくなる。また、ステップ3R,3Lの並列方向が水平方向となるような基体9の姿勢から、該基体9を右側に傾けることによって、左側ステップ3L(より詳しくはステップ3Lの左足との接触部位)と、車輪体5の接地部(X軸周りでの足載せ部3及び基体9の傾動中心)との水平距離(X軸方向での距離)が、ステップ3R,3Lの並列方向が水平方向となる状態での当該水平距離よりも小さくなる。
Supplementally, in the
このようにSTEP14−7又は14−8において、重み係数Wthを決定した後、制御ユニット50は、STEP14−9において、第2ゲイン調整パラメータKr2の値を“1”に設定する。さらに、制御ユニット50は、STEP14−10において、フラグFlagの値を“0”にした後、前記STEP14−11,14−12の処理を実行し、図7の処理を終了する。
After determining the weighting factor Wth in STEP 14-7 or 14-8 as described above, the
前記STEP14−4の判断結果が肯定的である場合は、搭乗行為用モードの開始後、今回の制御処理周期の前の各制御処理周期において、STEP14−1,14−2,13−3の判断結果が否定的、否定的、肯定的となっていた場合、あるいは、搭乗行為用モードの開始後、今回の制御処理周期の前のいずれか1つ以上の制御処理周期で、STEP14−2の判断結果が一旦、肯定的になって、後述するSTEP14−16,14−17の処理を既に実行した場合である。 If the determination result of STEP 14-4 is affirmative, the determinations of STEP 14-1, 14-2, and 13-3 are made in each control processing cycle after the start of the boarding action mode and before the current control processing cycle. If the result is negative, negative, or positive, or after the start of the boarding action mode, at any one or more control processing cycles before the current control processing cycle, the determination of STEP 14-2 This is a case where the result is once positive and the processing of STEPs 14-16 and 14-17 described later has already been executed.
この場合には、制御ユニット50は、STEP14−5において、フラグFlagの値が“1”であるか否かを判断する。このフラグFlagは、STEP14−16,14−17の処理を既に実行したか否かを、それぞれ、値“1”、“0”で示すフラグである。そして、制御ユニット50は、STEP14−5において、Flag=0である場合には(この状況は、搭乗行為用モードの開始後、未だ、STEP14−2の判断結果が肯定的になっていない場合で、乗員が片足をステップ3R又は3Lに載せている状況である)、前記したSTEP14−6からの処理を実行し、図17の処理を終了する。
In this case, the
また、STEP14−5でFlag=1である場合には、制御ユニット50は、後述するSTEP14−16からの処理を実行する。
Further, when Flag = 1 in STEP14-5, the
搭乗行為においては、乗員は、最終的に、その両足をステップ3R,3Lに載せる。この時、前記STEP14−2の判断結果が肯定的になる。
In the boarding action, the occupant finally places both feet on the
この場合には、制御ユニット50は、STEP14−15からの処理を実行する。すなわち、制御ユニット50は、STEP14−15において、フラグFlagの値を“1”にセットする。次いで、制御ユニット50は、STEP14−16,14−17の処理を実行し、第2ゲイン調整パラメータKr2の今回値と重み係数Wthの今回値とを前回値から変化させる。
In this case, the
具体的には、制御ユニット50は、STEP14−16において、Kr2の今回値を、前回値よりもあらかじめ定められた所定値Δkr1(0<Δkr1<1)だけ“0”に近づけた値(=Kr2の前回値−Δkr1)に決定する。なお、この場合、Kr2の前回値−Δkr1<0となる場合には、Kr2の今回値は“0”に設定される。
Specifically, in STEP14-16, the
また、STEP14−17においては、制御ユニット50は、Wthの今回値を、前回値よりもあらかじめ定められた所定値Δw1(0<Δw1<1)だけ“0”に近づけた値に決定される。より詳しくは、Wthの前回値≧0である場合には、Wthの今回値は、Wthの前回値からΔw1を減算した値(ただし、Wthの前回値−Δw1<0となる場合には、“0”)に決定される。また、Wthの前回値<0である場合には、Wthの今回値は、Wthの前回値にΔw1を加算した値(ただし、Wthの前回値+Δw1<0となる場合には、“0”)に決定される。
In STEP14-17, the
なお、Δkr1、Δw1はそれぞれ、Kr2、Wthの変化速度(1制御処理周期毎の変化量)を規定する値としての意味を持つ。これらのΔkr1、Δw1は同じ値である必要ななく、互いに異なる値に(例えば、Δkr1<Δw1となるように)設定されていてもよい。 In addition, Δkr1 and Δw1 have meanings as values that define the rate of change of Kr2 and Wth (the amount of change per control processing cycle), respectively. These Δkr1 and Δw1 do not need to be the same value, and may be set to different values (for example, Δkr1 <Δw1).
補足すると、乗員がその両足をステップ3R,3Lに載せた後であっても、基体9の姿勢のバランスを採るため等の理由で、乗員の片足がステップ3R又は3Lから一時的に離脱する場合もある。このような場合に、前記STEP14−5の判断結果が肯定的になり、上記STEP14−16、14−17の処理が実行されることとなる。
Supplementally, even after the occupant places both feet on the
上記の如くSTEP14−16、14−17の処理を実行した後、次に、制御ユニット50は、上記の如く決定したWthの今回値とKr2の今回値とがいずれも“0”であるか否かをSTEP14−18で判断する。そして、この判断結果が否定的である場合には、制御ユニット50は、前記したSTEP14−11からの処理を実行し、図17の処理を終了する。また、STEP14−18の判断結果が肯定的である場合には、制御ユニット50は、STEP14−19において、次回の動作モードを搭乗行為用モードから搭乗中モードに変更する。そして、STEP14−12において、基体傾斜角度目標値θb_xy_objを決定する。
After executing the processing of STEPs 14-16 and 14-17 as described above, the
本実施形態では、上記STEP14−12では、基体傾斜角度目標値θb_xy_objは、次式11x,11yにより決定される。 In the present embodiment, in STEP 14-12, the base body tilt angle target value θb_xy_obj is determined by the following equations 11x and 11y.
θb_x_obj=(1−|Wth|)・θb_x_搭乗中
+|Wth|・θb_x_乗降 ……式11x
θb_y_obj=(1−|Wth|)・θb_y_搭乗中
+|Wth|・(sgn(Wth)・θb_y_乗降) ……式11y
なお、sgn(Wth)は、Wthの符号関数であり、Wth>0である場合に、sgn(Wth)=+1、Wth<0である場合に、sgn(Wth)=−1、Wth=0である場合にsgn(Wth)=0となる。従って、式11yの右辺の第2項に関しては、|Wth|・(sgn(Wth)・θb_y_乗降)=Wth・θb_y_乗降である。
θb_x_obj = (1- | Wth |) · θb_x_ boarding
+ | Wth | ・ θb_x_ getting on and off ...... Formula 11x
θb_y_obj = (1- | Wth |) · θb_y_ boarding
+ | Wth | ・ (sgn (Wth) ・ θb_y_ on / off) …… Formula 11y
Note that sgn (Wth) is a sign function of Wth. When Wth> 0, sgn (Wth) = + 1, and when Wth <0, sgn (Wth) = − 1 and Wth = 0. In some cases, sgn (Wth) = 0. Therefore, for the second term on the right side of Expression 11y, | Wth | · (sgn (Wth) · θb_y_ on / off) = Wth · θb_y_ on / off.
ここで、式11xにおけるθb_x_乗降と式11yにおけるsgn(Wth)・θb_y_乗降とは、搭乗行為及び降車行為に適した基体9の傾斜角度としてあらかじめ設定された所定値の傾斜角度である。この場合、本実施形態では、Y軸周り方向でのθb_x_乗降は、Wthの極性が正極性である場合と負極性である場合とで同じ値に設定されている。
Here, θb_x_ boarding / alighting in Expression 11x and sgn (Wth) · θb_y_ boarding / alighting in Expression 11y are inclination angles having a predetermined value set in advance as the inclination angle of the
一方、X軸周り方向でのθb_y_乗降は、Wthの極性が正極性である場合(sgn(Wth)=+1となる場合)に、搭乗行為及び降車行為に適したX軸周り方向の基体9の傾斜角度として設定されている。この場合、θb_y_乗降は、基体9が左側に傾く傾斜角度であり、θb_y_乗降≠θb_y_搭乗中である。そして、本実施形態では、θb_y_乗降の符号を反転させた角度(=−θb_y_乗降)、すなわち、θb_y_乗降と同じ大きさだけ、基体9が右側に傾く傾斜角度が、Wthの極性が負極性である場合(sgn(Wth)=−1となる場合)に、搭乗行為及び降車行為に適したX軸周り方向の基体9の傾斜角度として設定されている。
On the other hand, the θb_y_ boarding / alighting in the direction around the X axis is the
従って、STEP14−12では、Y軸周り方向の基体傾斜角度目標値θb_x_objは、(1−|Wth|)、|Wth|を重みとして、θb_x_搭乗中とθb_x_乗降との重み付き平均に決定される。この場合、Wth=+1又は−1である場合には、θb_x_obj=θb_x_乗降となり、Wth=0である場合には、θb_x_obj=θb_x_搭乗中である。そして、|Wth|が“1”から“0”に近づいていくに伴い、θb_x_objは、θb_x_乗降からθb_x_搭乗中に近づいていく。 Therefore, in STEP14-12, the base body tilt angle target value θb_x_obj in the direction around the Y axis is determined to be a weighted average of θb_x_ during boarding and θb_x_ boarding / alighting with (1- | Wth |) and | Wth | as weights. Is done. In this case, when Wth = + 1 or −1, θb_x_obj = θb_x_ boarding / exiting is performed, and when Wth = 0, θb_x_obj = θb_x_ boarding. Then, as | Wth | approaches from “1” to “0”, θb_x_obj approaches from θb_x_ getting on and off to θb_x_ boarding.
なお、θb_x_乗降は、例えば、θb_x_搭乗中に一致していてもよい。この場合には、式11xにより決定されるθb_x_objは、Wthの値によらずに、常に、θb_x_搭乗中に一致する。 Note that θb_x_ boarding / alighting may coincide with, for example, θb_x_ boarding. In this case, θb_x_obj determined by Expression 11x always coincides with θb_x_ boarding regardless of the value of Wth.
また、搭乗行為用モードにおけるX軸周り方向の基体傾斜角度目標値θb_y_objは、θb_x_搭乗中と(sgn(Wth)・θb_y_乗降)との重み付き平均に決定される。この場合、Wth=+1又は−1である場合には、θb_y_obj=+θb_y_乗降又は−θb_y_乗降となり、Wth=0である場合には、θb_y_obj=θb_y_搭乗中である。そして、|Wth|が“1”から“0”に近づいていくに伴い、θb_y_objは、θb_y_乗降からθb_y_搭乗中に近づいていく。 Further, the base body inclination angle target value θb_y_obj in the direction around the X axis in the boarding action mode is determined as a weighted average between θb_x_ boarding and (sgn (Wth) · θb_y_ boarding / alighting). In this case, when Wth = + 1 or −1, θb_y_obj = + θb_y_ getting on / off or −θb_y_ getting on / off, and when Wth = 0, θb_y_obj = θb_y_ boarding. Then, as | Wth | approaches from “1” to “0”, θb_y_obj approaches from θb_y_ boarding / unloading to θb_y_ boarding.
補足すると、本実施形態では、θb_y_乗降りは、実際の基体傾斜角度θb_yが+θb_y_乗降りに一致している状態で、X軸方向で見たときの右側のステップ3Rの位置が、車輪体5の接地部(X軸周りでの足載せ部3及び基体9の傾動中心)の直上位置(鉛直方向上方の位置)もしくはこれに近い位置になると共に、実際の基体傾斜角度θb_yが−θb_y_乗降りに一致している状態で、X軸方向で見たときの左側のステップ3Lの位置が、車輪体5の接地部の直上位置もしくはこれに近い位置になるように設定されている。
Supplementally, in this embodiment, the position of
以上が搭乗行為用モードでのSTEP14の処理の詳細である。 The above is the details of the processing of STEP14 in the boarding action mode.
以上の処理によりSTEP11で判断する今回の動作モードが搭乗行為用モードに設定されている場合には、基本的には、次のように、第2ゲイン調整パラメータKr2と基体傾斜角度目標値θb_xy_objとが決定される。
When the current operation mode determined in
すなわち、乗員が搭乗行為を開始すべくその片足をステップ3R又は3Lに載せると、第2ゲイン調整パラメータKr2は、“1”に設定される。この状況(片足載せ期間)では、前記式09x,09yによりそれぞれ決定される第iゲイン係数Ki_x,Ki_y(i=1,2,3)は、それぞれ、Ki_b_x(=Gi_x_搭乗行為)、Ki_b_y(=Gi_y_搭乗行為)となる。従って、Ki_x,Ki_yのそれぞれの絶対値は、搭乗中モードよりも小さい値となる。
That is, when the occupant puts his / her foot on
さらに、この状況(片足載せ期間)では、重み係数Wthが“1”又は“−1”に設定される。このため、前記式11x,11yにより決定される基体傾斜角度目標値θb_xy_objのうちのY軸周り成分θb_x_objがθb_x_乗降に設定されると共に、X軸周り成分θb_y_objが、左側又は右側に基体9が傾斜する角度である+θb_y乗降又は−θb_y乗降に設定される。より詳しくは、乗員の右足がステップ3Rに載っている場合には、左側傾斜の+θb_y乗降がθb_y_objとして設定され、乗員の左足がステップ3Lに載っている場合には、右側傾斜の−θb_y乗降がθb_y_objとして設定される。
Further, in this situation (single foot placement period), the weight coefficient Wth is set to “1” or “−1”. For this reason, the Y axis around component θb_x_obj of the base body tilt angle target value θb_xy_obj determined by the formulas 11x and 11y is set to θb_x_ getting on and off, and the X axis around component θb_y_obj is on the left or right side of the
なお、Kr2とθb_xy_objとは、乗員の片足だけがステップ3R又は3Lに載せられている状態では、一定に保持される。
Note that Kr2 and θb_xy_obj are held constant when only one occupant's foot is placed on
次いで、上記の如く乗員の片足だけがステップ3R又は3Lに載せられている状態で、乗員が搭乗行為を完了すべく、残りの足(着床させていた足)をステップ3L又は3Rに載せると、Kr2の値は、その後、徐々に“1”から“0”に近づいていくように決定される。なお、Kr2の値が“0”に到達するまでに要する時間は、前記所定値Δkr1により規定される。
Next, when only one occupant's foot is placed on
この状況では、前記式09xにより決定される第iゲイン係数Ki_x(i=1,2,3)は、Gi_x_搭乗行為から、その絶対値が徐々に増加しつつ、Gi_x_搭乗中に近づいていく。同様に、前記式09yにより決定される第iゲイン係数Ki_y(i=1,2,3)は、Gi_y_搭乗行為から、その絶対値が徐々に増加しつつ、Gi_y_搭乗中に近づいていく。この場合、Ki_x,Ki_yがそれぞれGi_x_搭乗中、Gi_y_搭乗中に達するまでは、Ki_x,Ki_yのそれぞれの絶対値は、搭乗中モードよりも小さい値に保たれる。 In this situation, the i-th gain coefficient Ki_x (i = 1, 2, 3) determined by the expression 09x approaches Gi_x_ boarding while the absolute value gradually increases from Gi_x_ boarding action. Go. Similarly, the i-th gain coefficient Ki_y (i = 1, 2, 3) determined by the expression 09y approaches Gi_y_ boarding while the absolute value gradually increases from Gi_y_ boarding action. . In this case, until Ki_x and Ki_y reach Gi_x_ boarding and Gi_y_ boarding, the absolute values of Ki_x and Ki_y are kept smaller than those in the boarding mode.
また、この状況では、重み係数Wthが“1”又は“−1”から“0”に近づいていくように決定される。このため、前記式11xにより決定されるY軸周り方向の基体傾斜角度目標値θb_x_objは、θb_x_乗降から搭乗中モード用の設定値θb_x_搭乗中に徐々に近づいていくように決定される。さらに、前記式11yにより決定されるX軸周り方向の基体傾斜角度目標値θb_y_objは、+θb_y乗降又は−θb_y乗降から搭乗中モード用の設定値θb_y_搭乗中に徐々に近づいていくように決定される。なお、θb_x_obj,θb_y_objがそれぞれθb_x_搭乗中、θb_y_搭乗中に到達するまでの時間は、前記所定値Δw1により規定される。 In this situation, the weight coefficient Wth is determined to approach “0” from “1” or “−1”. For this reason, the base body tilt angle target value θb_x_obj in the direction around the Y axis determined by the equation 11x is determined so as to gradually approach from θb_x_ boarding / alighting to the set value θb_x_ boarding mode for boarding. Further, the base body tilt angle target value θb_y_obj in the direction around the X-axis determined by the equation 11y is determined so as to gradually approach from the + θb_y boarding / alighting or −θb_y boarding / alighting to the setting value θb_y_ boarding for the boarding mode. The It should be noted that the time until θb_x_obj and θb_y_obj arrive while boarding θb_x_ and boarding θb_y_ is defined by the predetermined value Δw1.
補足すると、θb_x_乗降=θb_x_搭乗中とした場合には、θb_x_objは変化せず、θb_x_搭乗中に保たれる。 Supplementally, when θb_x_ boarding / exiting = θb_x_ boarding, θb_x_obj does not change and is kept while boarding θb_x_.
また、搭乗行為中は、乗員は、基本的には、把持部15R,15Lのうちの少なくともいずれか一方を把持する。
Further, during the boarding action, the occupant basically grips at least one of the
次いで、最終的に、Kr2が“0”まで変化し、且つ、Wthが“0”まで変化(ひいてはθb_xy_objがθb_xy_搭乗中まで変化)すると、次回の制御処理周期での動作モードが搭乗中モードに変更される。従って、乗員が搭乗行為を完了すべく、その両足をステップ3R,3Lに載せても、Kr2が“0”になり、且つ、θb_xy_objがθb_xy_搭乗中になるまでは、動作モードは搭乗行為用モードに維持される。
Then, finally, when Kr2 changes to “0” and Wth changes to “0” (and θb_xy_obj changes until θb_xy_ boarding), the operation mode in the next control processing cycle becomes the boarding mode. Changed to Therefore, even if the occupant puts both feet on
なお、搭乗行為用モードの開始後、乗員が未だ、その片足をステップ3R又は3Lに載せていない状態(STEP14−3の判断結果が肯定的になる場合)には、第2ゲイン調整パラメータKr2は、“1”に設定される。従って、前記式09x,09yによりそれぞれ決定される第iゲイン係数Ki_x,Ki_y(i=1,2,3)は、それぞれ、Ki_b_x(=Gi_x_搭乗行為)、Ki_b_y(=Gi_y_搭乗行為)となる。一方、この状況では、重み係数Wthは暫定的に“0”に設定されるので、基体傾斜角度目標値θb_xy_objは暫定的に搭乗中モードと同じ値(=θb_xy_搭乗中)に設定される。なお、この状況での基体傾斜角度目標値θb_xy_objを自立モードと同じ値(=θb_xy_自立)に設定してもよい。
In addition, after the start of the boarding action mode, when the occupant has not put his / her foot on
また、搭乗行為用モードで、乗員が搭乗/降車用操作子58の降車用操作部58bがON操作された場合には、前回の制御処理周期での動作モード(直前の動作モード)が、自立モードである場合には、今回の動作モードが強制的に自立モードに変更され、第iゲイン係数Ki_x,Ki_y(i=1,2,3)と、基体傾斜角度目標値θb_xy_objとが、それぞれ、自立モードと同じ値に設定される。そして、次回の制御処理周期での動作モードが自立モードに変更される。
Further, when the getting-off
また、前回の制御処理周期での動作モード(直前の動作モード)が、自立モードでない場合(搭乗行為用モードである場合)には、Kr2は前回値と同じ値に保持される。ひいては、第iゲイン係数Ki_x,Ki_y(i=1,2,3)が前回値と同じ値に保持される。さらに、基体傾斜角度目標値θb_xy_objも、前回値と同じ値に保持される。そして、次回の制御処理周期での動作モードが降車行為用モードに変更される。 Further, when the operation mode in the previous control processing cycle (immediate operation mode) is not the self-supporting mode (in the case of the boarding action mode), Kr2 is held at the same value as the previous value. As a result, the i-th gain coefficient Ki_x, Ki_y (i = 1, 2, 3) is held at the same value as the previous value. Further, the base body tilt angle target value θb_xy_obj is also held at the same value as the previous value. And the operation mode in the next control processing cycle is changed to the mode for alighting action.
次に、今回の動作モードが降車行為用モードである場合の処理であるSTEP15の処理は、図19のフローチャートに示すサブルーチン処理により実行される。
Next, the processing of
この処理では、制御ユニット50は、まず、前記STEP3で取得した荷重センサ54R,54Lの出力に基づいて、前記STEP14−2と同じ判断処理をSTEP15−1で実行し、左右の両ステップ3R,3LがON状態であるか否かを判断する。
In this process, the
そして、この判断結果が肯定的である場合、すなわち、乗員の両足が、未だ、ステップ3R,3Lに載せられており、実質的な降車行為が開始されていない場合には、制御ユニット50は、STEP15−10において、降車行為における重み係数Wthの目標値Wthaimと、第2ゲイン調整パラメータKr2の目標値Kr2aimとをそれぞれ“0”に設定する。そして、制御ユニット50は、後述するSTEP15−7からの処理を実行する。
If this determination result is affirmative, that is, if both feet of the occupant are still on the
STEP15−1の判断結果が否定的である場合には、制御ユニット50は、前記STEP14−3と同じ判断処理をSTEP15−2で実行し、両ステップ3R,3LがいずれもOFF状態であるか否かを判断する。
If the determination result in STEP 15-1 is negative, the
この判断結果が肯定的となる場合は、乗員がその両足をステップ3R,3Lから離脱させ、実質的に降車行為が終了した状態である。この場合には、制御ユニット50は、STEP15−11において、今回の動作モードを搭乗行為用モードから自立モードに強制的に変更する。
When the determination result is affirmative, the occupant has removed both feet from
さらに、制御ユニット50は、前記STEP14−22〜14−24と同じ処理をSTEP15−12〜15−14で実行し、図19の処理を終了する。すなわち、制御ユニット50は、第2ゲイン調整パラメータKr2の値を“0”にすることと、基体傾斜角度目標値θb_xy_objとして、自立モード用の設定値θb_xy_自立を設定することと、次回の動作モードを自立モードにすることとを、それぞれ、STEP15−12〜15−14で実行する。
Further, the
STEP15−2の判断結果が否定的となる場合は、降車行為の途中の状況(詳しくは、乗員がその片足だけをステップ3R又は3Lに載せている状況)である。この場合には、制御ユニット50は、次に右側のステップ3RがON状態であるか否か、すなわち、ステップ3R,3Lのうちの右側のステップ3Rのみに乗員の足(右足)が載せられているか否かをSTEP15−3で判断する。そして、この判断結果が肯定的である場合には、制御ユニット50は、STEP15−4で重み係数Wthの目標値Wthaimを“1”とする。また、STEP15−3の判断結果が否定的である場合(左側のステップ3Lのみに乗員の足(左足)が載せられている場合)には、制御ユニット50は、STEP15−5で重み係数Wthの目標値Wthaimを“−1”とする。
If the determination result in STEP 15-2 is negative, this is a situation in the middle of getting off (specifically, a situation in which the occupant places only one foot on
このように重み係数Wthの目標値Wthaimを決定した後、制御ユニット50は、STEP15−6において、第2ゲイン調整パラメータKr2の目標値Kr2aimを“1”に設定する。
After determining the target value Wthaim of the weighting factor Wth in this way, the
以上のようにSTEP15−6の処理を実行した後、あるいは、前記STEP15−10の処理を実行した後、制御ユニット50は、次にSTEP15−7の処理を実行し、第2ゲイン調整パラメータKr2の今回値と、重み係数Wthの今回値とを決定する。
After executing the processing of STEP 15-6 as described above, or after executing the processing of STEP 15-10, the
具体的には、制御ユニット50は、Kr2の今回値を、前回値よりもあらかじめ定められた所定値Δkr2(0<Δkr2<1)だけ目標値Kr2aim(=0又は1)に近づけた値に決定する。より詳しくは、Kr2の前回値≧Kr2aimである場合には、Kr2の今回値は、Kr2の前回値からΔkr2を減算した値(ただし、その減算結果の値がKr2aimよりも小さくなった場合には、Kr2aim)に決定される。また、Kr2の前回値<Kr2aimである場合には、Kr2の今回値は、Kr2の前回値にΔkr2を加算した値(ただし、その加算結果の値がKr2aimよりも大きくなった場合には、Kr2aim)に決定される。
Specifically, the
また、制御ユニット50は、Wthの今回値を、前回値よりもあらかじめ定められた所定値Δw2(0<Δw2<1)だけ目標値Wthaim(=0又は1又は−1)に近づけた値に決定される。より詳しくは、Wthの前回値≧Wthaimである場合には、Wthの今回値は、Wthの前回値からΔw2を減算した値(ただし、その減算結果の値がWthaimよりも小さくなった場合には、Wthaim)に決定される。また、Wthの前回値<Wthaimである場合には、Wthの今回値は、Wthの前回値にΔw2を加算した値(ただし、その加算結果の値がWthaimよりも大きくなった場合には、Wthaim)に決定される。
Further, the
なお、Δkr2とΔw2とは同じ値である必要ななく、互いに異なる値に設定されていてもよい。また、Δkr2、Δw2は、それぞれ、搭乗行為用モードでの前記STEP14−16で使用するΔkr1、前記STEP14−17で使用するΔw1と同じ値である必要はない。 Note that Δkr2 and Δw2 do not have to be the same value, and may be set to different values. Further, Δkr2 and Δw2 do not have to be the same values as Δkr1 used in STEP14-16 and Δw1 used in STEP14-17, respectively, in the boarding action mode.
次いで、制御ユニット50は、前記STEP14−12と同じ処理をSTEP15−8で実行することによって、基体傾斜角度目標値θb_xy_objを決定する。すなわち、重み係数Wthに応じて、前記式11x、11yによりそれぞれ、θb_x_objとθb_y_objとを決定する。
Next, the
次いで、制御ユニット50は、STEP15−9において、次回の動作モードを現在の動作モード(=降車行為用モード)に保持し、図19の処理を終了する。
Next, in STEP 15-9, the
以上が搭乗行為用モードでのSTEP15の処理の詳細である。
The above is the details of the processing of
以上の処理によりSTEP11で判断する今回の動作モードが降車行為用モードに設定されている場合には、基本的には、次のように、第2ゲイン調整パラメータKr2と基体傾斜角度目標値θb_xy_objとが決定される。
When the current operation mode determined in
すなわち、降車行為用モードの開始後、乗員がその両足をステップ3R,3Lに載せたままの状態では、第2ゲイン調整パラメータKr2の目標値Kr2aimが“0”に設定されると共に、重み係数Wthの目標値Wthaimが“0”に設定される。
That is, after the start of the dismounting action mode, when the occupant keeps both feet on the
この状況では、Kr2は基本的には、“0”に保持される。このため、前記式09x,09yによりそれぞれ決定される第iゲイン係数Ki_x,Ki_y(i=1,2,3)は、それぞれ、搭乗中モードと同じ値(Gi_x_搭乗中、Gi_y_搭乗中)となる。 In this situation, Kr2 is basically held at “0”. Therefore, the i-th gain coefficients Ki_x and Ki_y (i = 1, 2, 3) determined by the expressions 09x and 09y, respectively, are the same values as in the boarding mode (Gi_x_ boarding, Gi_y_ boarding). It becomes.
また、この状況では、Wthも基本的には、“0”に保持される。このため、前記式11x,11yにより決定される基体傾斜角度目標値θb_xy_objは、基本的には搭乗中モードと同じ値θb_xy_搭乗中になる。従って、この状況での車両1の制御状態は、実質的に、搭乗中モードと同等である。
In this situation, Wth is basically held at “0”. For this reason, the base body tilt angle target value θb_xy_obj determined by the equations 11x and 11y is basically the same value θb_xy_ boarding as in the boarding mode. Therefore, the control state of the
次いで、乗員が降車行為を開始すべくその片足をステップ3R又は3Lから離脱させると、Kr2の目標値Kr2aimが“1”に設定される。そして、Kr2の値は、Kr2aim(=1)に近づいていくように決定される。従って、この状況(片足載せ期間)では、前記式09xにより決定される第iゲイン係数Ki_x(i=1,2,3)は、その絶対値が徐々に減少しつつ、Gi_x_降車行為(これは、本実施形態では、Gi_x_搭乗行為に一致する)に近づいていく。同様に、前記式09yにより決定される第iゲイン係数Ki_y(i=1,2,3)は、その絶対値が徐々に減少しつつ、Gi_y_降車行為(これは、本実施形態では、Gi_y_搭乗行為に一致する)に徐々に近づいていく。この場合、Ki_x,Ki_yのそれぞれの絶対値は、搭乗中モードよりも小さい値に保たれる。
Next, when the occupant disengages one foot from
なお、この状況でのKr2の変化速度(1制御処理周期当たりの変化量)、ひいては、各第iゲイン係数Ki_x,Ki_yの変化速度は、前記所定値Δkr2により規定される。 In this situation, the rate of change of Kr2 (the amount of change per control processing cycle), and thus the rate of change of each i-th gain coefficient Ki_x, Ki_y, is defined by the predetermined value Δkr2.
また、この状況(片足載せ期間)では、Wthの目標値Wthaimが“+1”又は“−1”に設定される。そして、Wthの値は、Wthaim(“+1”又は“−1”)に近づいていくように決定される。このため、前記式11xにより決定されるY軸周り方向の基体傾斜角度目標値θb_x_objは、θb_x_乗降に徐々に近づいていくように決定される。さらに、前記式11yにより決定されるX軸周り方向の基体傾斜角度目標値θb_y_objは、+θb_y乗降又は−θb_y乗降に徐々に近づいていくように決定される。より詳しくは、乗員の右足がステップ3Rに載っている場合には、左側傾斜の+θb_y乗降に近づいていくようにθb_y_objが設定され、乗員の左足がステップ3Lに載っている場合には、右側傾斜の−θb_y乗降に近づいていくようにθb_y_objが設定される。なお、θb_x_obj,θb_y_objがそれぞれの変化速度(1制御処理周期当たりの変化量)は、前記所定値Δw2により規定される。
In this situation (one-legged period), the Wth target value Wthaim is set to “+1” or “−1”. The value of Wth is determined so as to approach Wthim (“+1” or “−1”). For this reason, the base body tilt angle target value θb_x_obj in the direction around the Y axis determined by the expression 11x is determined so as to gradually approach θb_x_ boarding / alighting. Further, the base body tilt angle target value θb_y_obj in the direction around the X axis determined by the equation 11y is determined so as to gradually approach the + θb_y getting-on / off or the −θb_y getting-on / off. More specifically, when the occupant's right foot is on
補足すると、θb_x_乗降=θb_x_搭乗中とした場合には、θb_x_objは変化せず、θb_x_搭乗中に保たれる。 Supplementally, when θb_x_ boarding / exiting = θb_x_ boarding, θb_x_obj does not change and is kept while boarding θb_x_.
次いで、乗員が降車行為を完了すべく、ステップ3R又は3Lに載せていた片足を該ステップ3R又は3Lから離脱させると、今回の動作モードが強制的に自立モードに変更され、第iゲイン係数Ki_x,Ki_y(i=1,2,3)と、基体傾斜角度目標値θb_xy_objとが、それぞれ、自立モードと同じ値に設定される。そして、次回の制御処理周期での動作モードが自立モードに変更される。
Next, when the occupant removes one foot placed on
なお、本実施形態では、降車行為用モードでは、例えば搭乗/降車用操作子58の搭乗用操作部58aがON操作されても、それに応じた処理が行われることはない。このため、本実施形態では、降車行為用モードでは、乗員がその両足をステップ3R,3Lから離脱させて、実質的な降車行為を完了しない限り(STEP15−2の判断結果が肯定的にならない限り)、次回の制御処理周期での動作モードが降車行為用モードから自立モードに変更されないようになっている。
In the present embodiment, in the getting-off action mode, for example, even when the boarding operation unit 58a of the boarding /
補足すると、降車行為中は、搭乗行為中と同様に、乗員は、基本的には、把持部15R,15Lのうちの少なくともいずれか一方を把持する。
Supplementally, during the dismounting action, the occupant basically grips at least one of the
以上が、STEP4の処理の詳細である。 The above is the details of the processing of STEP4.
次に、本実施形態の車両1の作動に関して説明する。
Next, the operation of the
まず、車両1の動作モードが前記搭乗中モード又は自立モードである場合の作動を説明する。
First, an operation when the operation mode of the
前記搭乗モード及び自立モードのいずれの動作モードにおいても、基本的には、基体9の姿勢が、前記基体傾斜角度偏差計測値θbe_x_s,θbe_y_sの両方が“0”となる姿勢(以下、この姿勢を基本姿勢という)に保たれるように、換言すれば、車両系重心点(車両・乗員全体重心点又は車両単体重心点)の位置が、車輪体5の接地面のほぼ真上に位置する状態に保たれるように、操作量(制御入力)としての仮想車輪回転角加速度指令ωdotw_xy_cmdが決定される。より詳しく言えば、基体9の姿勢を前記基本姿勢に保ちつつ、車両系重心点の移動速度の推定値としての重心速度推定値Vb_xy_sを制御用目標重心速度Vb_xy_mdfdに収束させるように、仮想車輪回転角加速度指令ωdotw_xy_cmdが決定される。なお、制御用目標重心速度Vb_xy_mdfdは、前記した如く、通常は“0”である。この場合には、基体9の姿勢を前記基本姿勢に保ちつつ、車両系重心点がほぼ静止するように、仮想車輪回転角加速度指令ωdotw_xy_cmdが決定されることとなる。
Basically, in any of the operation modes of the boarding mode and the self-supporting mode, the posture of the
そして、ωdotw_xy_cmdの各成分を積分してなる仮想車輪回転角速度指令ωw_xy_cmdを変換してなる電動モータ31R,31Lのそれぞれの回転角速度が、電動モータ31R,31Lの速度指令ω_R_cmd,ω_L_cmdとして決定される。さらに、その速度指令ω_R_cmd,ω_L_cmdに従って、各電動モータ31R,31Lの回転速度が制御される。ひいては車輪体5のX軸方向及びY軸方向のそれぞれの移動速度が、ωw_x_cmdに対応する仮想車輪62_xの移動速度と、ωw_y_cmdに対応する仮想車輪62_yの移動速度とに各々一致するように制御される。
Then, the respective rotational angular velocities of the
このため、例えば、Y軸周り方向で、実際の基体傾斜角度θb_xが目標値θb_x_objから前傾側にずれると、そのずれを解消すべく(θbe_x_sを“0”に収束させるべく)、車輪体5が前方に向かって移動する。同様に、実際のθb_xが目標値θb_x_objから後傾側にずれると、そのずれを解消すべく(θbe_x_sを“0”に収束させるべく)、車輪体5が後方に向かって移動する。
For this reason, for example, if the actual base body tilt angle θb_x shifts forward from the target value θb_x_obj in the direction around the Y axis, the
また、例えば、X軸周り方向で、実際の基体傾斜角度θb_yが目標値θb_y_objから右傾側にずれると、そのずれを解消すべく(θbe_y_sを“0”に収束させるべく)、車輪体5が右向きに移動する。同様に、実際のθb_yが目標値θb_y_objから左傾側にずれると、そのずれを解消すべく(θbe_y_sを“0”に収束させるべく)、車輪体5が左向きに移動する。
Further, for example, when the actual base body tilt angle θb_y shifts to the right tilt side from the target value θb_y_obj in the direction around the X axis, the
さらに、実際の基体傾斜角度θb_x,θb_yの両方が、それぞれ目標値θb_x_obj,θb_y_objからずれると、θb_xのずれを解消するための車輪体5の前後方向の移動動作と、θb_yのずれを解消するための車輪体5の左右方向の移動動作とが合成され、車輪体5がX軸方向及びY軸方向の合成方向(X軸方向及びY軸方向の両方向に対して傾斜した方向)に移動することとなる。
Further, when both the actual base body tilt angles θb_x and θb_y deviate from the target values θb_x_obj and θb_y_obj, respectively, in order to eliminate the shift operation of the
このようにして、基体9が前記基本姿勢から傾くと、その傾いた側に向かって、車輪体5が移動することとなる。従って、例えば前記搭乗中モードにおいて、乗員が意図的にその上体を傾けると、その傾けた側に、車輪体5が移動することとなる。
Thus, when the
なお、基体9の姿勢が基本姿勢に収束すると、車輪体5の移動もほぼ停止する。また、例えば、基体9のY軸周り方向の傾斜角度θb_xを基本姿勢から傾いた一定の角度に維持すると、車輪体5のX軸方向の移動速度は、その角度に対応する一定の移動速度(制御用目標重心速度Vb_x_mdfdと一定の定常偏差を有する移動速度)に収束する。このことは、基体9のX軸周り方向の傾斜角度θb_yを基本姿勢から傾いた一定の角度に維持した場合も同様である。
Note that when the posture of the
また、例えば基体9の前記基本姿勢からの傾き量(基体傾斜角度偏差計測値θbe_x_s,θbe_y_s)が比較的大きくなり、それを解消し、もしくはその傾き量を維持するために必要な車輪体5のX軸方向及びY軸方向の一方又は両方の移動速度(これらの移動速度は、それぞれ、図12に示した前記重心速度定常偏差予測値Vb_x_prd、Vb_y_prdに相当する)が、電動モータ31R,31Lの一方又は両方の回転角速度を許容範囲から逸脱させてしまうような、過大な移動速度になるような状況では、該車輪体5の移動速度に対して逆向きとなる速度(詳しくは、Vw_x_lim2−Vb_x_prd及びVw_y_lim2−Vb_y_prd)が制御用目標重心速度Vb_x_mdfd,Vb_y_mdfdとして決定される。そして、制御入力を構成する操作量成分のうちの操作量成分u3_x,u3_yが、この制御用目標重心速度Vb_x_mdfd,Vb_y_mdfdに重心速度推定値Vb_x_s,Vb_y_sをそれぞれ収束させるように決定される。このため、基体9の前記基本姿勢からの傾き量が過大になるのを予防し、ひいては、電動モータ31R,31Lの一方又は両方の回転角速度が高速になり過ぎるのが防止される。
Further, for example, the tilt amount (base tilt angle deviation measurement values θbe_x_s, θbe_y_s) of the
さらに、前記ゲイン調整部78では、重心速度推定値Vb_x_s,Vb_y_sの一方又は両方が大きくなり、ひいては、基体9の前記基本姿勢からの傾きを解消し、もしくはその傾き量を維持するために必要な車輪体5のX軸方向及びY軸方向の一方又は両方の移動速度が、電動モータ31R,31Lの一方又は両方の回転角速度を許容範囲から逸脱させてしまうような、過大な移動速度になる恐れがある状況では、その逸脱が顕著になるほど(詳しくは、図10に示すVover_x,Vover_yの絶対値が大きくなるほど)、前記第1ゲイン調整パラメータKr1_x,Kr1_yの一方又は両方が“0”から“1”に近づけられる。
Further, in the
この場合、前記式09xにより算出される各第iゲイン係数Ki_x(i=1,2,3)の絶対値は、Kr_xが“1”に近づくほど、大きくなる。このことは、前記式09yにより算出される各第iゲイン係数Ki_y(i=1,2,3)についても同様である。 In this case, the absolute value of each i-th gain coefficient Ki_x (i = 1, 2, 3) calculated by the expression 09x increases as Kr_x approaches “1”. The same applies to each i-th gain coefficient Ki_y (i = 1, 2, 3) calculated by the expression 09y.
そして、上記ゲイン係数の絶対値が大きくなることによって、基体9の傾きの変化に対する操作量(仮想車輪回転角加速度指令ωdotw_x_cmd,ωdotw_y_cmd)の感度が高まる。従って、基体9の基本姿勢からの傾き量が大きくなろうとすると、それを素早く解消するように、車輪体5の移動速度が制御されることとなる。従って、基体9が基本姿勢から大きく傾くことが強めに抑制され、ひいては、車輪体5のX軸方向及びY軸方向の一方又は両方の移動速度が、電動モータ31R,31Lの一方又は両方の回転角速度を許容範囲から逸脱させてしまうような、過大な移動速度になるのを防止することができる。
As the absolute value of the gain coefficient increases, the sensitivity of the operation amount (virtual wheel rotation angular acceleration commands ωdotw_x_cmd, ωdotw_y_cmd) with respect to a change in the tilt of the
次に、車両1の動作モードが前記搭乗行為用モード又は降車行為用モードである場合の作動を説明する。
Next, the operation in the case where the operation mode of the
搭乗行為用モードと降車行為用モードとにおいて、基本的には、乗員がその片足だけをステップ3R又は3Lに載せている状況では、前記式07x,07yで使用する第iゲイン係数Ki_x,Ki_y(i=1,2,3)がいずれも、その絶対値が搭乗中モードよりも小さい値になるように設定される。
In the boarding action mode and the getting-off action mode, basically, in the situation where the occupant puts only one foot on the
この状況では、基体9及び足載せ部3(搭乗部)の実際の傾斜角度が変化しても、車輪体5の移動動作を制御するための制御用操作量である仮想車輪回転角加速度指令ωdotw_xy_cmdの変化は搭乗中モードに比して微小なものとなる。ひいては、基体3及び足載せ部3の実際の傾斜角度の変化に対する、車輪体5の移動加速度の変化の感度が搭乗中モードよりも小さくなる。このため、基体9及び足載せ部3を基本姿勢から傾けた状態であっても、車輪体5の移動が生じないか、もしくは、生じ難い状態となる。
In this situation, the virtual wheel rotation angular acceleration command ωdotw_xy_cmd, which is a control operation amount for controlling the moving operation of the
従って、搭乗行為用モードと降車行為用モードとにおいて、乗員がその片足だけをステップ3R又は3Lに載せている状況では、車輪体5が動かないか、もしくは動き難い状態を保ちつつ、基体9及び足載せ部3を搭乗行為又は降車行為に適した姿勢に傾けることが容易になる。
Therefore, in the boarding action mode and the getting-off action mode, in the situation where the occupant puts only one foot on the
加えて、本実施形態では、乗員が右側のステップ3Rに片足を載せた状態では、基体傾斜角度目標値θb_y_objが、基体9が左側に傾く角度(搭乗行為用モードでは、+θb_y_乗降り、降車行為用モードでは、θb_y_搭乗中よりも+θb_y_乗降側に傾けた角度)に設定される。換言すれば、この状態では、基体傾斜角度目標値θb_y_objが、X軸方向で見たときに、右側のステップ3Rが車輪体5の接地部の直上位置により近づくような角度に設定される。また、乗員が左側のステップ3Lに片足を載せた状態では、基体傾斜角度目標値θb_y_objが、基体9が右側に傾く角度(搭乗行為用モードでは、−θb_y_乗降り、降車行為用モードでは、θb_y_搭乗中よりも−θb_y_乗降側に傾けた角度)に設定される。換言すれば、この状態では、基体傾斜角度目標値θb_y_objが、X軸方向で見たときに、左側のステップ3Lが車輪体5の接地部の直上位置により近づくような角度に設定される。このため、基体9及び足載せ部3の姿勢を搭乗行為又は降車行為に適した姿勢に保ちやすくなる。
In addition, in this embodiment, when the occupant puts one foot on the
この結果、車輪体5が動かないか、もしくは動き難い状態を保ちつつ、搭乗行為又は降車行為を行なうことが容易になる。
As a result, it becomes easy to perform the boarding action or the getting-off action while maintaining the state where the
ここで、本実施形態の車両1と本発明との対応関係を補足しておく。
Here, the correspondence between the
本実施形態では、車両1に搭乗する乗員の前後方向(X軸方向)、左右方向(Y軸方向)が、それぞれ、本発明における第1の方向、第2の方向に相当する。
In the present embodiment, the front-rear direction (X-axis direction) and the left-right direction (Y-axis direction) of the passenger boarding the
そして、制御ユニット50が実行する図7の処理により、本発明における移動動作部制御手段が実現される。なお、前記搭乗行為用モードと降車行為用モードとが本発明における過渡期用モードに相当する。また、本実施形態における搭乗中モードと自立モードとが、本発明における搭乗中モード、非搭乗中モードに相当する。
And the movement operation part control means in this invention is implement | achieved by the process of FIG. 7 which the
また、搭乗中モード用の基体傾斜角度の設定値θb_xy_搭乗中が本発明における搭乗中モード用目標傾斜角度に相当し、自立モード用の基体傾斜角度の設定値θb_xy_自立が、本発明における非搭乗中モード用目標傾斜角度に相当する。さらに、搭乗行為用モードにおいて、乗員の一方の足のみがステップ3R又は3Lに載せられて状態(図17のSTEP14−7又は14−8の処理が実行される状況)で、STEP14−12の処理により決定される基体傾斜角度目標値θb_xy_objと、降車行為用モードにおいて、乗員の一方の足のみがステップ3R又は3Lに載せられて状態(図19のSTEP15−4又は15−5の処理が実行される状況)で、STEP15−6の処理により決定される基体傾斜角度目標値θb_xy_objとがそれぞれ、本発明における過渡期用目標傾斜角度に相当する。
Further, the setting value θb_xy_ of the base body inclination angle for the in-boarding mode corresponds to the target inclination angle for in-board mode in the present invention, and the setting value θb_xy_ independence of the base body inclination angle for the self-standing mode is in the present invention. This corresponds to the target inclination angle for the non-boarding mode. Further, in the mode for boarding action, only one of the passenger's feet is placed on
また、荷重センサ54R,54Lが本発明における足載せ検知手段手段に相当する。
Further, the
次に、以上説明した実施形態に係わる変形態様に関していくつか説明しておく。 Next, some modifications relating to the embodiment described above will be described.
前記実施形態では、|Gi_x_搭乗行為|<|Gi_x_搭乗中A|、|Gi_y_搭乗行為|<|Gi_y_搭乗中A|とし、搭乗行為用モードと降車行為用モードとにおいて、X軸方向に関する各第iゲイン係数Ki_x(i=1,2,3)と、Y軸方向に関する各第iゲイン係数Ki_y(i=1,2,3)とが、いずれも、その絶対値が搭乗中モードより小さくなるようにした。 In the above embodiment, | Gi_x_boarding action | <| Gi_x_boarding A |, | Gi_y_boarding action | <| Gi_y_boarding A |, and in the boarding action mode and the getting-off action mode, the X axis Each i-th gain coefficient Ki_x (i = 1, 2, 3) related to the direction and each i-th gain coefficient Ki_y (i = 1, 2, 3) related to the Y-axis direction are both boarded in absolute value. Made smaller than mode.
ただし、例えば、Y軸方向に関しては、|Gi_y_搭乗行為|<|Gi_y_搭乗中A|とする一方、X軸方向に関しては、Gi_x_搭乗行為をGi_x_搭乗中Aに一致もしくはほぼ一致させ、搭乗行為用モードにおいて、X軸方向に関する各第iゲイン係数Ki_x(i=1,2,3)が搭乗中モードと一致又はほぼ一致するようにしてもよい。同様に、Y軸方向に関しては、|Gi_y_降車行為|<|Gi_y_搭乗中A|とする一方、X軸方向に関しては、Gi_x_降車行為をGi_x_搭乗中Aに一致もしくはほぼ一致させ、降車行為用モードにおいて、X軸方向に関する各第iゲイン係数Ki_x(i=1,2,3)が搭乗中モードと一致又はほぼ一致するようにしてもよい。 However, for example, for the Y-axis direction, | Gi_y_boarding action | <| Gi_y_during boarding A |, while for the X-axis direction, Gi_x_boarding action matches or substantially matches Ai during boarding. In the boarding action mode, each i-th gain coefficient Ki_x (i = 1, 2, 3) in the X-axis direction may match or substantially match the boarding mode. Similarly, with respect to the Y-axis direction, | Gi_y_getting-off action | <| Gi_y_during boarding A |, while with respect to the X-axis direction, Gi_x_getting-off action matches or substantially matches Gi_x_during boarding A, In the getting-off action mode, each i-th gain coefficient Ki_x (i = 1, 2, 3) in the X-axis direction may match or substantially match the boarding mode.
すなわち、本実施形態の如く、足載せ部3(ステップ3R,3L)に搭乗する車両1では、搭乗行為や降車行為を行い易くするためには、特に、X軸周り方向で基体9及び足載せ部3を傾け易いことが好ましく、Y軸周り方向での傾きは一般には、搭乗中モードでの基体傾斜角度目標値θb_x_objと同程度でよい。従って、上記の如く、搭乗行為用モード、あるいは、降車行為用モードにおいて、X軸方向に関する各第iゲイン係数Ki_x(i=1,2,3)が搭乗中モードと一致又はほぼ一致するようにしてもよい。
That is, as in this embodiment, in the
また、前記実施形態では、搭乗行為用モードと降車行為用モードとにおいて、各第iゲイン係数Ki_x,Ki_y(i=1,2,3)が、いずれも、その絶対値が搭乗中モードより小さくなるようにしたが、例えば、次のようにしてもよい。すなわち、例えば、搭乗行為用モード又は降車行為用モードにおいて、Y軸方向でのゲイン係数Ki_y(i=1,2,3)に関し、第3ゲイン係数K3_yを搭乗中モードでの値に一致又はほぼ一致させ、第1ゲイン係数K1_yと第2ゲイン係数K2_yとを、その絶対値が搭乗中モードよりも小さくなるようにしてもよい。例えば、搭乗行為用モード又は降車行為用モードでのK1_y及びK2_yを“0”もしくはこれに近い値に設定してもよい。このようにゲイン係数Ki_y(i=1,2,3)を設定することは、搭乗行為用モードにおいては、前記実施形態における|G1_y_搭乗行為|<|G1_y_搭乗中A|、|G2_y_搭乗行為|<|G2_y_搭乗中A|、|G3_y_搭乗行為|≒|G3_y_搭乗中A|となるようにGi_y_搭乗行為を設定しておくことによって実現することができる。また、降車行為用モードにおいては、前記実施形態におけるG1_y_降車行為をGi_y_搭乗行為と同様に設定しておけばよい。 In the embodiment, in the boarding action mode and the getting-off action mode, the i-th gain coefficients Ki_x and Ki_y (i = 1, 2, 3) are both smaller in absolute value than in the boarding mode. For example, it may be as follows. That is, for example, in the boarding action mode or the getting-off action mode, with respect to the gain coefficient Ki_y (i = 1, 2, 3) in the Y-axis direction, the third gain coefficient K3_y matches or substantially matches the value in the boarding mode. The first gain coefficient K1_y and the second gain coefficient K2_y may be made to coincide with each other so that the absolute value thereof is smaller than that in the boarding mode. For example, K1_y and K2_y in the boarding action mode or the getting-off action mode may be set to “0” or a value close thereto. Setting the gain coefficient Ki_y (i = 1, 2, 3) in this manner means that in the boarding action mode, | G1_y_boarding action | <| G1_y_boarding A |, | G2_y_ This can be realized by setting the Gi_y_ boarding action so that the boarding action | <| G2_y_boarding A |, | G3_y_boarding action | ≈ | G3_y_boarding A |. Moreover, in the mode for getting off, the G1_y_ getting-off action in the embodiment may be set similarly to the Gi_y_ boarding action.
このようにすることによって、搭乗行為用モード又降車行為用モードにおいて、基体9及び足載せ部3のX軸周りでの傾斜角度の変化に対する車輪体5の移動速度の変化の感度を小さくすることができる。
In this way, in the boarding action mode or the getting-off action mode, the sensitivity of the change in the moving speed of the
なお、基体9及び足載せ部3のX軸周りでの傾斜角度の変化に対する車輪体5の移動速度の変化の感度をより小さくすることは、基本的には、第3ゲイン係数K3_yの絶対値に対する第1ゲイン係数K1_yの絶対値の比率|K1_x|/|K3_x|を小さくすることで実現することができる。
Note that the sensitivity of the change in the moving speed of the
また、搭乗行為用モード又は降車行為用モードにおいて、X軸方向でのゲイン係数Ki_x(i=1,2,3)に関し、上記と同様に、第3ゲイン係数K3_xを搭乗中モードでの値に一致又はほぼ一致させ、第1ゲイン係数K1_xと第2ゲイン係数K2_xとを、その絶対値が搭乗中モードよりも小さくなるように設定してもよい。このようにすることによって、搭乗行為用モード又は降車行為用モードにおいて、基体9及び足載せ部3のY軸周りでの傾斜角度の変化に対する車輪体5の移動速度の変化の感度を小さくすることができる。
Further, in the boarding action mode or the getting-off action mode, the gain coefficient Ki_x (i = 1, 2, 3) in the X-axis direction is set to the third gain coefficient K3_x in the on-board mode as described above. The first gain coefficient K1_x and the second gain coefficient K2_x may be set so that the absolute values thereof are smaller than in the boarding mode. By doing so, in the boarding action mode or the getting-off action mode, the sensitivity of the change in the moving speed of the
なお、本発明では、前記実施形態の如くゲイン係数の値を、搭乗行為用モード及び降車行為用モードにおいて、搭乗中モードと異ならせることは必須ではなく、搭乗行為用モード及び降車行為用モードにおけるゲイン係数の値を搭乗中モードと同じ値に設定してもよい。 In the present invention, it is not essential that the value of the gain coefficient is different from the in-boarding mode in the boarding action mode and the unloading action mode as in the above embodiment. The value of the gain coefficient may be set to the same value as in the boarding mode.
また、前記実施形態の如くゲイン係数の値を、搭乗行為用モード及び降車行為用モードにおいて、搭乗中モードと異ならせることに代えて、次のようにしてもよい。すなわち、搭乗行為用モード又は降車行為用モードにおいて、少なくとも乗員がその片足のみをステップ3R又は3Lに載せている状態において、電動モータ31R,31Lを回転停止状態に維持するように、ひいては、車輪体5が移動停止状態に保持されるように該電動モータ31R,31Lを制御するようにしてもよい。
Moreover, instead of changing the value of the gain coefficient in the boarding action mode and the getting-off action mode as in the above-described embodiment, the following may be used. That is, in the boarding action mode or the getting-off action mode, in order to maintain the
あるいは、例えば搭乗行為用モード又は降車行為用モードにおいて、前記重心速度制限部76におけるリミット処理部100での各電動モータ31R,31Lの回転角速度の許容範囲を“0”に設定し、リミット処理部100の出力値が“0”に保持されるようにしてもよい。このようにした場合には、搭乗行為用モード又は降車行為用モードにおいて、基体傾斜角度によらずに、重心速度推定値Vb_x_s,Vb_y_sが“0”に収束するように車輪体5の移動動作が制御される。このため、搭乗行為用モード又は降車行為用モードにおける車輪体5の移動速度を“0”に収束させ、基体傾斜角度によらずに、該車輪体5が動かないようにすることができる。
Alternatively, for example, in the boarding action mode or the getting-off action mode, the permissible range of the rotational angular speeds of the
また、前記実施形態では、前記式07x、07yにより制御用操作量としての仮想車輪回転角加速度指令ωdotw_x_cmd,ωdotw_y_cmdを算出するようにしたが、例えば、式07x、07yの右辺の第2項を省略した式によって、ωdotw_x_cmd,ωdotw_y_cmdを算出するようにしてもよい。 In the embodiment, the virtual wheel rotation angular acceleration commands ωdotw_x_cmd and ωdotw_y_cmd are calculated as control operation amounts using the equations 07x and 07y. For example, the second term on the right side of the equations 07x and 07y is omitted. Ωdotw_x_cmd and ωdotw_y_cmd may be calculated by the above formula.
また、前記実施形態では、図1及び図2に示した構造の車両1を例示したが、本発明における倒立振子型車両1は、本実施形態で例示した車両に限られるものではない。
Moreover, in the said embodiment, although the
具体的には、本実施形態の車両1の移動動作部としての車輪体5は一体構造のものであるが、例えば、前記特許文献3の図10に記載されているような構造のものであってもよい。すなわち、剛性を有する円環状の軸体に、複数のローラをその軸心が該軸体の接線方向に向くようにして回転自在に外挿し、これらの複数のローラを軸体に沿って円周方向に配列させることによって、車輪体を構成してもよい。
Specifically, the
さらに移動動作部は、例えば、特許文献2の図3に記載されているようなクローラ状の構造のものであってもよい。 Further, the moving operation unit may have a crawler-like structure as described in FIG.
あるいは、例えば、前記特許文献2の図5、特許文献3の図7、もしくは特許文献1の図1に記載されているように、移動動作部を球体により構成し、この球体を、アクチュエータ装置(例えば前記車輪体5を有するアクチュエータ装置)によりX軸周り方向及びY軸周り方向に回転駆動するように車両を構成してもよい。
Alternatively, for example, as described in FIG. 5 of
このように本発明は、前記特許文献1〜3等に見られる如き、各種の構造の倒立振子型車両に適用することが可能である。
Thus, the present invention can be applied to an inverted pendulum type vehicle having various structures as seen in
さらには、本発明における倒立振子型車両は、移動動作部を複数(例えば、左右方向に2つ、あるいは、前後方向に2つ、あるいは、3つ以上)備えていてもよい。 Furthermore, the inverted pendulum type vehicle according to the present invention may include a plurality of moving operation units (for example, two in the left-right direction, two in the front-rear direction, or three or more).
また、本発明における倒立振子型車両は、基体が乗員の搭乗部と共に傾動することは必須ではない。例えば、複数の移動動作部を有する場合に、これらの移動動作部を組付ける基体が床面に対して傾動しないようにすると共に、この基体に対して搭乗部を傾動自在に組付けるようにしてもよい。 In the inverted pendulum type vehicle according to the present invention, it is not essential that the base body tilts together with the passenger's riding section. For example, in the case of having a plurality of moving operation units, the base body to which these moving operation units are assembled is prevented from tilting with respect to the floor surface, and the riding section is mounted to be tiltable with respect to the base body. Also good.
1…倒立振子型車両、3…足載せ部、3R…ステップ(右足載せ部)、3L…ステップ(左足載せ部)、5…車輪体(移動動作部)、7…アクチュエータ装置、9…基体、50…制御ユニット(移動動作部制御手段)、54R,54L…荷重センサ(足載せ検知手段)。
DESCRIPTION OF
Claims (4)
前記移動動作部の制御のための車両の動作モードとして、前記足載せ部上に乗員が搭乗しようとする時の過渡的な動作モードである搭乗行為用モードと、前記足載せ部上から乗員が降車しようとする時の過渡的な動作モードである降車行為用モードとのうちの少なくとも一方のモードから成る過渡期用モードを含み、該過渡期用モードを含む各動作モードにおいて前記移動動作部の移動動作を前記アクチュエータ装置を介して制御する移動動作部制御手段と、
前記足載せ部に乗員の各足が載せられているか否かに応じた出力を生成する足載せ検知手段とを備え、
前記移動動作部制御手段は、前記過渡期用モードでは、該過渡期用モードの開始時から終了時までの期間のうち、少なくとも前記足載せ検知手段の出力が、乗員の両足のうちの一方の足のみが前記足載せ部に載せられていることを示す出力となる片足載せ期間を含む期間において、前記足載せ部の過渡期用目標傾斜角度を前記足載せ検知手段の出力に応じて決定すると共に、その決定した過渡期用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部の移動動作を制御し、
少なくとも前記過渡期用モードでの前記片足載せ期間において前記移動動作部制御手段が決定する前記過渡期用目標傾斜角度は、前記足載せ検知手段の出力が、乗員の右足のみが前記足載せ部に載せられていることを示す出力である場合には、少なくとも前記足載せ部のうちの右足載せ部と該足載せ部の傾動中心との水平距離が、該足載せ部のうちの右足載せ部と左足載せ部とが水平方向に並列する状態での当該水平距離よりも相対的に小さくなる角度であり、前記足載せ検知手段の出力が、乗員の左足のみが前記足載せ部に載せられていることを示す出力である場合には、少なくとも前記足載せ部のうちの左足載せ部と該足載せ部の傾動中心との水平距離が、該足載せ部のうちの右足載せ部と左足載せ部とが水平方向に並列する状態での当該水平距離よりも相対的に小さくなる角度であることを特徴とする倒立振子型車両の制御装置。 A moving operation unit movable in all directions including a first direction and a second direction orthogonal to each other on the floor surface, an actuator device for driving the moving operation unit, and the moving operation unit and the actuator device are assembled. And a footrest for an occupant that is assembled to the base body and is tiltable with respect to a vertical direction around two axes, an axis around the first direction and an axis around the second direction. And an inverted pendulum type vehicle configured to be able to ride on the footrest portion in an upright posture placed on the footrest portion so that an occupant arranges both feet in the left-right direction with a gap therebetween A device,
As the operation mode of the vehicle for controlling the moving operation unit, a mode for boarding action which is a transient operation mode when the occupant tries to board the footrest unit, and the occupant from above the footrest unit A transitional mode consisting of at least one mode of a mode for getting off which is a transient operation mode when attempting to get off, and in each operation mode including the mode for transitional period, A moving operation unit control means for controlling the moving operation via the actuator device;
A footrest detecting means for generating an output according to whether or not each foot of an occupant is placed on the footrest portion;
The moving operation unit control means, wherein in the transition period for the mode, of the period from the start to the end of the transition period for the mode, the output of at least the footrest detecting means, of the legs of the occupant In a period including a one-leg rest period that is an output indicating that only one leg is placed on the footrest, the transitional target inclination angle of the footrest is determined according to the output of the footrest detection means. Controlling the movement operation of the movement operation unit so as to bring the actual inclination angle of the footrest part closer to the determined target inclination angle for the transition period,
The target inclination angle for the transition period determined by the moving operation unit control means in at least the one leg rest period in the transition mode is such that the output of the foot rest detection means is such that only the right foot of the occupant is in the foot rest section. In the case of an output indicating that the footrest is placed, at least the horizontal distance between the right footrest portion of the footrest portion and the tilt center of the footrest portion is the right footrest portion of the footrest portion. It is an angle that is relatively smaller than the horizontal distance in a state where the left footrest part is parallel to the horizontal direction, and the output of the footrest detection means is that only the occupant's left foot is placed on the footrest part The horizontal distance between at least the left footrest portion of the footrest portion and the tilt center of the footrest portion is the right footrest portion and the left footrest portion of the footrest portion. In the state where the Control device of an inverted pendulum type vehicle which is a relatively small angle from the horizontal distance.
前記移動動作部の制御のための車両の動作モードとして、前記足載せ部上に乗員が搭乗しようとする時の過渡的な動作モードである搭乗行為用モードと、前記足載せ部上から乗員が降車しようとする時の過渡的な動作モードである降車行為用モードとのうちの少なくとも一方のモードから成る過渡期用モードを含み、該過渡期用モードを含む各動作モードにおいて前記移動動作部の移動動作を前記アクチュエータ装置を介して制御する移動動作部制御手段と、
前記足載せ部に乗員の各足が載せられているか否かに応じた出力を生成する足載せ検知手段とを備え、
前記移動動作部制御手段は、前記過渡期用モードでは、該過渡期用モードの開始時
から終了時までの期間のうち、少なくとも前記足載せ検知手段の出力が、乗員の両足のうちの一方の足のみが前記足載せ部に載せられていることを示す出力となる片足載せ期間を含む期間において、前記足載せ部のうちの右足載せ部と左足載せ部との並列方向が水平方向から傾斜した方向となる過渡期用目標傾斜角度を前記足載せ検知手段の出力に応じて決定すると共に、その決定した過渡期用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部の移動動作を制御し、
少なくとも前記過渡期用モードでの前記片足載せ期間において前記移動動作部制御手段が決定する前記過渡期用目標傾斜角度は、前記足載せ検知手段の出力が、乗員の右足のみが前記足載せ部に載せられていることを示す出力である場合には、前記右足載せ部が左足載せ部よりも相対的に高い位置となる角度であり、乗員の左足のみが前記足載せ部に載せられていることを示す出力である場合には、前記左足載せ部が右足載せ部よりも相対的に高い位置となる角度であることを特徴とする倒立振子型車両の制御装置。 A moving operation unit movable in all directions including a first direction and a second direction orthogonal to each other on the floor surface, an actuator device for driving the moving operation unit, and the moving operation unit and the actuator device are assembled. And a footrest for an occupant that is assembled to the base body and is tiltable with respect to a vertical direction around two axes, an axis around the first direction and an axis around the second direction. And an inverted pendulum type vehicle configured to be able to ride on the footrest portion in an upright position on the footrest portion so that an occupant places both feet in the left-right direction with a space therebetween A device,
As the operation mode of the vehicle for controlling the moving operation unit, a mode for boarding action which is a transient operation mode when the occupant tries to board the footrest unit, and the occupant from above the footrest unit A transitional mode consisting of at least one mode of a mode for getting off which is a transient operation mode when attempting to get off, and in each operation mode including the mode for transitional period, A moving operation unit control means for controlling the moving operation via the actuator device;
A footrest detecting means for generating an output according to whether or not each foot of an occupant is placed on the footrest portion;
The moving operation unit control means, wherein in the transition period for the mode, at the start of the mode for the transition period
In the period from the end to the end, at least the output of the footrest detection means includes a one footrest period in which only one foot of the occupant's feet is placed on the footrest portion. In the period, the transitional target inclination angle in which the parallel direction of the right footrest portion and the left footrest portion of the footrest portion is inclined from the horizontal direction is determined according to the output of the footrest detection means. , Controlling the movement operation of the movement operation unit so as to bring the actual inclination angle of the footrest portion closer to the determined transition period target inclination angle,
The target inclination angle for the transition period determined by the moving operation unit control means in at least the one leg rest period in the transition mode is such that the output of the foot rest detection means is such that only the right foot of the occupant is in the foot rest section. In the case of an output indicating that the vehicle is placed, the right footrest is at an angle that is relatively higher than the left footrest, and only the occupant's left foot is placed on the footrest. In the case of an output indicating the above, the control device for an inverted pendulum type vehicle, characterized in that the left footrest is at an angle relatively higher than the right footrest.
前記動作モードは、前記搭乗行為用モードと、乗員が前記足載せ部上に搭乗した状態での動作モードである搭乗中モードとを含み、
前記移動動作部制御手段は、前記搭乗中モードでは、少なくとも前記足載せ部のうちの右足載せ部と左足載せ部との並列方向が水平方向となる所定値の搭乗中用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部を制御し、前記搭乗行為用モードにおいて、前記足載せ検知手段の出力が、乗員の一方の足のみが前記足載せ部に載せられていることを示す出力から、乗員の両足が前記足載せ部に載せられていることを示す出力に変化した場合に、前記足載せ部の目標傾斜角度を前記過渡期用目標傾斜角度から前記搭乗中用目標傾斜角度に変化させるように決定し、その決定した目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部を制御することを特徴とする倒立振子型車両の制御装置。 In the control apparatus for an inverted pendulum type vehicle according to claim 2,
The operation mode includes the mode for boarding action, and an on-boarding mode that is an operation mode in a state in which an occupant is on the footrest,
In the on-boarding mode, the movement operation unit control means is configured to set the foot to a target inclination angle for boarding at a predetermined value in which the parallel direction of at least the right foot rest portion and the left foot rest portion of the foot rest portion is a horizontal direction. The moving operation unit is controlled so as to bring the actual inclination angle of the mounting part closer, and in the riding action mode, the output of the footrest detection means is such that only one foot of the occupant is placed on the footrest part. The output indicating that the two feet of the occupant are changed to the output indicating that both feet of the occupant are mounted on the footrest portion, the target inclination angle of the footrest portion is changed from the target inclination angle for the transition period during the boarding. Inverted pendulum type vehicle control comprising: determining to change to a target inclination angle for use, and controlling the moving operation unit to bring the actual inclination angle of the footrest portion closer to the determined target inclination angle apparatus.
前記動作モードは、前記降車行為用モードと、乗員が車両から離脱した状態での動作モードである非搭乗中モードとを含み、
前記移動動作部制御手段は、前記非搭乗中モードでは、少なくとも前記足載せ部のうちの右足載せ部と左足載せ部との並列方向が水平方向となる非搭乗中用目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部を制御し、前記降車行為用モードにおいて、前記足載せ検知手段の出力が、乗員の一方の足のみが前記足載せ部に載せられていることを示す出力から、乗員の両足とも前記足載せ部に載せられていないことを示す出力に変化した場合に、前記足載せ部の目標傾斜角度を前記過渡期用目標傾斜角度から前記非搭乗中用目標傾斜角度に変化させるように決定し、その決定した目標傾斜角度に前記足載せ部の実際の傾斜角度を近づけるように前記移動動作部を制御することを特徴とする倒立振子型車両の制御装置。 In the control apparatus for an inverted pendulum type vehicle according to claim 2 or 3,
The operation mode includes the mode for getting off the vehicle and a non-boarding mode that is an operation mode in a state in which an occupant leaves the vehicle,
In the non-boarding mode, the movement operation unit control means sets the footrest to a target inclination angle for non-boarding in which a parallel direction of at least the right footrest portion and the left footrest portion of the footrest portion is a horizontal direction. The moving operation unit is controlled so as to bring the actual inclination angle of the unit closer to each other, and in the dismounting action mode, the output of the footrest detection means is such that only one foot of the occupant is placed on the footrest portion. The output indicating that both feet of the occupant are not placed on the footrest, the target inclination angle of the footrest is changed from the target inclination angle for the transition period to the non-boarding state. Inverted pendulum type vehicle control comprising: determining to change to a target inclination angle for use, and controlling the moving operation unit to bring the actual inclination angle of the footrest portion closer to the determined target inclination angle apparatus
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009218313A JP5355328B2 (en) | 2009-09-23 | 2009-09-23 | Control device for inverted pendulum type vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009218313A JP5355328B2 (en) | 2009-09-23 | 2009-09-23 | Control device for inverted pendulum type vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011068165A JP2011068165A (en) | 2011-04-07 |
| JP5355328B2 true JP5355328B2 (en) | 2013-11-27 |
Family
ID=44013907
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009218313A Expired - Fee Related JP5355328B2 (en) | 2009-09-23 | 2009-09-23 | Control device for inverted pendulum type vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5355328B2 (en) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5927031B2 (en) | 2011-11-26 | 2016-05-25 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP5808289B2 (en) | 2012-05-14 | 2015-11-10 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP6081081B2 (en) * | 2012-05-14 | 2017-02-15 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP5959927B2 (en) | 2012-05-14 | 2016-08-02 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP5922489B2 (en) * | 2012-05-14 | 2016-05-24 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP5916520B2 (en) * | 2012-05-14 | 2016-05-11 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP5959928B2 (en) | 2012-05-14 | 2016-08-02 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP5927032B2 (en) | 2012-05-14 | 2016-05-25 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP5921950B2 (en) | 2012-05-14 | 2016-05-24 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
| JP2014088054A (en) * | 2012-10-29 | 2014-05-15 | Toyota Motor Corp | Inverted mobile entity and control method thereof |
| GB2523884A (en) | 2014-02-04 | 2015-09-09 | Timur Artemev | Usage detection system for a self-balancing powered unicycle device |
| GB2533078A (en) * | 2014-09-03 | 2016-06-15 | Artemev Timur | Entity presence detection system for a self-balancing powered unicycle device |
| JP6220763B2 (en) | 2014-11-06 | 2017-10-25 | 本田技研工業株式会社 | Inverted pendulum type vehicle |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06105415B2 (en) * | 1988-06-17 | 1994-12-21 | 特芸株式会社 | Self-supporting carrier and automatic carrier using it |
| JP4691912B2 (en) * | 2004-06-16 | 2011-06-01 | トヨタ自動車株式会社 | Unstable traveling device |
| CN101353070A (en) * | 2005-04-14 | 2009-01-28 | 丰田自动车株式会社 | Coaxial two-wheel vehicle |
| KR101113927B1 (en) * | 2007-04-20 | 2012-02-29 | 혼다 기켄 고교 가부시키가이샤 | Omnidirectional driver and omnidirectional vehicle employing it |
| JP4862801B2 (en) * | 2007-10-22 | 2012-01-25 | トヨタ自動車株式会社 | Coaxial motorcycle and control method thereof |
-
2009
- 2009-09-23 JP JP2009218313A patent/JP5355328B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011068165A (en) | 2011-04-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5355328B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5306474B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5504272B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5436564B2 (en) | Control device for inverted pendulum type vehicle | |
| JP2011063219A (en) | Inverted-pendulum mobile body | |
| JP5383812B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5414804B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5306472B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5414801B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5414800B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5355700B2 (en) | Inverted pendulum type moving body control device | |
| JPWO2011036695A1 (en) | Inverted pendulum type vehicle | |
| JP5379235B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5306470B2 (en) | Control device for omnidirectional vehicle | |
| JP5430317B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5355348B2 (en) | Control device for omnidirectional vehicle | |
| JP5436119B2 (en) | Inverted pendulum type moving body | |
| JPWO2011033577A1 (en) | Control device for inverted pendulum type vehicle | |
| JP5386283B2 (en) | Inverted pendulum type moving body, control device, and control method | |
| JP5330199B2 (en) | Control device for inverted pendulum type vehicle | |
| JP5306951B2 (en) | Inverted pendulum type vehicle | |
| JP2011073628A (en) | Control device for inverted pendulum type moving body |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130708 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130827 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5355328 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |