JP5313565B2 - Image reading apparatus, image reading method, image reading system, and program - Google Patents
Image reading apparatus, image reading method, image reading system, and program Download PDFInfo
- Publication number
- JP5313565B2 JP5313565B2 JP2008173500A JP2008173500A JP5313565B2 JP 5313565 B2 JP5313565 B2 JP 5313565B2 JP 2008173500 A JP2008173500 A JP 2008173500A JP 2008173500 A JP2008173500 A JP 2008173500A JP 5313565 B2 JP5313565 B2 JP 5313565B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- document
- reading
- read
- image reading
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 151
- 238000001514 detection method Methods 0.000 claims abstract description 113
- 230000008569 process Effects 0.000 claims description 132
- 238000003708 edge detection Methods 0.000 claims description 24
- 238000004364 calculation method Methods 0.000 claims description 10
- 239000000872 buffer Substances 0.000 description 41
- 238000010586 diagram Methods 0.000 description 20
- 238000003705 background correction Methods 0.000 description 13
- 230000008859 change Effects 0.000 description 11
- 239000000428 dust Substances 0.000 description 9
- 230000006870 function Effects 0.000 description 9
- 239000011521 glass Substances 0.000 description 7
- 230000004069 differentiation Effects 0.000 description 6
- 239000012536 storage buffer Substances 0.000 description 4
- 101100311460 Schizosaccharomyces pombe (strain 972 / ATCC 24843) sum2 gene Proteins 0.000 description 3
- 238000013500 data storage Methods 0.000 description 3
- 230000003321 amplification Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images























Landscapes
- Image Input (AREA)
- Facsimile Heads (AREA)
- Facsimiles In General (AREA)
- Facsimile Scanning Arrangements (AREA)
Abstract
Description
本発明は、原稿の画像情報を読取る画像読取装置、画像読取方法及び該方法を実行するためのプログラムに関する。 The present invention relates to an image reading apparatus for reading image information of a document, an image reading method, and a program for executing the method.
一般に、画像読取装置は、光源により原稿を照明して原稿画像をラインイメージセンサ等により読取るが、光源の光量むらやラインイメージセンサの感度むらがあるため、白色の色基準部材を読取って補正しなければならない。この際、原稿を照射する光源の発光量を適正化する光量調整と、ラインイメージセンサの出力信号を増幅する回路の増幅率を最適化するゲイン調整とを行ったうえで、光源の光量むらやラインイメージセンサの感度むらをラインイメージセンサの光電変換素子ごとに補正するシェーディング補正を行うのが一般的である。なお、後述する本発明の実施の形態では、上述の「光量調整」及び「ゲイン調整」等を含み、ラインイメージセンサが原稿の画像情報を一様に読取るための補正を「シェーディング補正」と称することとする。 In general, an image reading apparatus illuminates a document with a light source and reads a document image with a line image sensor or the like. However, since there is unevenness in the light amount of the light source and uneven sensitivity in the line image sensor, the white color reference member is read and corrected. There must be. At this time, after adjusting the amount of light to optimize the amount of light emitted from the light source that irradiates the document and the gain adjustment to optimize the amplification factor of the circuit that amplifies the output signal of the line image sensor, In general, shading correction is performed to correct the sensitivity unevenness of the line image sensor for each photoelectric conversion element of the line image sensor. In the embodiment of the present invention to be described later, the correction for the line image sensor to uniformly read the image information of the document including the above-described “light amount adjustment” and “gain adjustment” is referred to as “shading correction”. I will do it.
また、一般的に、原稿読取時は、原稿と背景の境界の検知、原稿の傾きの検知、原稿の裏面画像の透け防止等の目的で、ラインイメージセンサの対向部材の色を白以外の色(例えば、黒色)にすることが多い。 In general, when reading a document, the line image sensor is set to a color other than white for the purpose of detecting the boundary between the document and the background, detecting the tilt of the document, and preventing the transparency of the back image of the document. (For example, black) is often used.
図19は、従来の画像読取装置を説明する図であり、図19aは、ラインイメージセンサの第1の移動位置を示し、図19bは第2の移動位置を示す。 19A and 19B are diagrams for explaining a conventional image reading apparatus. FIG. 19A shows a first movement position of the line image sensor, and FIG. 19B shows a second movement position.
図19に示すように、画像読取装置701は、原稿723を搬送しながらラインイメージセンサ711によって原稿723を読み取って読取画像を取得する。画像を読み取るタイミングとしては、レジストセンサ721の設置位置を原稿の先端が通過した後に画像読取を開始し、レジストセンサ721の設置位置を原稿が通過し終わった後に画像読取を終了する。なお、原稿検知センサ721とラインイメージセンサ711は離れているため、原稿の読取は、原稿の先端がレジストセンサ721上を通過してから一定時間経過後に開始される。また、原稿の読取は、原稿の後端がレジストセンサ721上を通過してから一定時間経過後に終了される。このようにして読取画像の先端レジストと後端レジストが調整される。
As shown in FIG. 19, the
画像読取装置701はまず、原稿723の読取を行う前に、図中矢印S方向にラインイメージセンサ711を移動させ、色基準部材717を読取る。これにより、ラインイメージセンサ711の出力をもとに生成する画像データをシェーディング補正するための補正用データを生成し画素毎に記憶する。
The
なお、画像読取装置701は、ラインイメージセンサ711が色基準部材717を読取る位置に移動したことを位置検知センサ720で検知することができる。
The
その後、画像読取装置701は、ラインイメージセンサ711を元の位置に戻し(図19b参照)、原稿723を搬送しながら原稿723を読取る。ここで、原稿723の読取時においては、事前に記憶した補正用データを参照して、ラインイメージセンサ711の出力をもとに生成した画像データをシェーディング補正する。
Thereafter, the
この様に、ラインイメージセンサ711がシェーディング補正用の補正データ取得を行うために色基準部材を読み取る位置(図19a参照)と原稿の読取を行う位置(図19b参照)とを移動する構成を有する画像読取装置では、原稿の画像情報読取りを行う位置がずれると、原稿読取のレジストレーションずれを引き起こしてしまう。このレジストレーションずれを防止するため、ラインイメージセンサの位置を検知するための位置検知センサ720を設けて、ラインイメージセンサの位置決めをするのが一般的である。
In this manner, the
また従来は、読取画像中の原稿画像のサイズ検出や原稿画像の傾きの検出は、ラインイメージセンサの対向部材の色を黒にして、読取画像中の背景画像の部分と原稿画像の部分の境界位置を検出することにより行われている。 Conventionally, the size of the original image in the read image and the detection of the inclination of the original image are detected by setting the color of the opposing member of the line image sensor to black, and the boundary between the background image portion and the original image portion in the read image. This is done by detecting the position.
しかしながら、縁が黒で塗られた原稿や、明度の低い余白部をもつ原稿のように光の反射率が低い原稿を読み取る場合、背景画像(一般的には黒)と原稿部分の境界位置が検出しにくい。この問題を解消するために、特許文献1に開示された画像読取装置では、対向部材の色を反射率の高い色(一般的には白)にしている。また別の装置では、さらに、原稿の後端に影ができる構成にし、読取画像内の原稿後端の影を利用して境界位置を検出しているものがある。
しかしながら、原稿の端部を含まないよう領域指定して読取った場合や、読取可能長さが実際の原稿長より短かった場合には、原稿の後端部分の影が読取れないため、原稿の後端部分の影を利用する画像読取装置では原稿境界位置を誤検知することがある。例えば、図20aのように1本黒い横線2001が描かれた原稿の点線で囲まれた領域2000を読取るとする。この場合、読取られた読取画像(図20b)内に現れる黒い横線2002を影と誤認識してしまい、正しい境界位置を検知できないため、原稿境界位置検知処理を行うと図20cのような小さい画像にしてしまう場合がある。
However, if the document is scanned by specifying an area not including the edge of the document, or if the readable length is shorter than the actual document length, the shadow of the trailing edge of the document cannot be read. An image reading apparatus that uses the shadow of the trailing edge may erroneously detect the document boundary position. For example, assume that an
本発明の目的は、原稿境界位置検知処理の誤動作を回避できる画像読取装置を提供することにある。 SUMMARY OF THE INVENTION An object of the present invention is to provide an image reading apparatus that can avoid a malfunction in document boundary position detection processing.
上記目的を達成するために、本発明の一態様に係る画像読取装置は、原稿に形成された画像を読み取る画像読取手段と、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像を用いて原稿のサイズを検知する原稿サイズ検知手段と、前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記原稿のサイズを検知する原稿サイズ検知処理を行えるか否かを判断する判断手段とを備え、前記判断手段によって前記原稿サイズ検知処理を行えると判断されると、前記原稿サイズ検知手段は、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿のサイズを検知することを特徴とする。
また、本発明の他の一態様に係る画像読取装置は、原稿に形成された画像を読み取る画像読取手段と、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像を用いて原稿のサイズを検知する原稿サイズ検知手段と、前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記原稿のサイズを検知する原稿サイズ検知処理を行えるか否かを判断する判断手段とを備え、前記判断手段は、前記読取画像の前記副走査方向に沿った長さが、前記原稿前後端検出手段によって検出された前記原稿の先端と後端から求まる前記原稿の長さよりも、短い場合には、前記原稿サイズ検知処理を行えないと判断し、短くない場合には、前記原稿サイズ検知処理を行えると判断することを特徴とする。
また、本発明の他の一態様に係る画像読取装置は、原稿に形成された画像を読み取る画像読取手段と、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像中の原稿画像の傾き補正を行う傾き補正手段と、前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記読取画像中の原稿画像の傾きを補正する傾き補正処理を行えるか否かを判断する判断手段とを備え、前記判断手段によって前記傾き補正処理を行えると判断されると、前記傾き補正手段は、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿画像の傾きを補正することを特徴とする。
また、本発明の他の一態様に係る画像読取装置は、原稿に形成された画像を読み取る画像読取手段と、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像中の原稿画像の傾き補正を行う傾き補正手段と、前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記読取画像中の原稿画像の傾きを補正する傾き補正処理を行えるか否かを判断する判断手段とを備え、前記判断手段は、前記読取画像の前記副走査方向に沿った長さが、前記原稿前後端検出手段によって検出された前記原稿の先端と後端から求まる前記原稿の長さよりも、短い場合には、前記傾き補正処理を行えないと判断し、短くない場合には、前記傾き補正処理を行えると判断することを特徴とする。
In order to achieve the above object, an image reading apparatus according to an aspect of the present invention includes an image reading unit that reads an image formed on a document, and a leading end of the document in a sub-scanning direction of reading by the image reading unit. and the document longitudinal end detecting means for detecting a rear end, based on the specified scan area, and the document size detection means for detecting the size of the original using the read image of a document obtained by reading by the image reading means, wherein A determination unit that determines whether or not a document size detection process for detecting the size of the document can be performed based on a length of the read image in the sub-scanning direction and a detection result detected by the document front and rear edge detection unit; When the determination unit determines that the document size detection process can be performed, the document size detection unit detects whether the document image in the read image is a background image. Based on the information indicating the position of the field, and detecting the size of the document.
An image reading apparatus according to another aspect of the present invention includes an image reading unit that reads an image formed on a document, and a front end and a rear end of the document in a sub-scanning direction of reading by the image reading unit. Document front and rear edge detection means for detecting, document size detection means for detecting the size of the document using a read image of the document read by the image reading means based on designation of the reading area, and the read image Determination means for determining whether or not document size detection processing for detecting the size of the document can be performed based on a length in the sub-scanning direction and a detection result detected by the document front and rear edge detection unit; The judging means determines the length of the read image along the sub-scanning direction from the leading edge and the trailing edge of the document detected by the document front / rear edge detecting means. Also, when short, it is determined that not be the document size detection processing, if not shorter is characterized in that it is determined that allows the document size detection process.
An image reading apparatus according to another aspect of the present invention includes an image reading unit that reads an image formed on a document, and a front end and a rear end of the document in a sub-scanning direction of reading by the image reading unit. and the document longitudinal end detecting means for detecting, based on the specified scan area, the inclination correction means for performing tilt correction of the original image in the read image of a document obtained by reading by the image reading means, the said read image sub Judging means for judging whether or not inclination correction processing for correcting the inclination of the document image in the read image can be performed based on the length in the scanning direction and the detection result detected by the document front and rear edge detection means; And when the determination means determines that the inclination correction processing can be performed, the inclination correction means is based on information indicating the position of the boundary between the document image and the background image in the read image. , And correcting the inclination of the document image.
An image reading apparatus according to another aspect of the present invention includes an image reading unit that reads an image formed on a document, and a front end and a rear end of the document in a sub-scanning direction of reading by the image reading unit. Document front / rear edge detection means for detecting, inclination correction means for correcting the inclination of the document image in the read image of the document obtained by reading by the image reading means based on the designation of the reading area, and the sub-image of the read image Judging means for judging whether or not inclination correction processing for correcting the inclination of the document image in the read image can be performed based on the length in the scanning direction and the detection result detected by the document front and rear edge detection means; The length of the read image along the sub-scanning direction is determined by the length of the original obtained from the leading edge and the trailing edge of the original detected by the original front and rear edge detecting means. Also, if short, determines not perform the inclination correction processing, if not shorter is characterized in that it is determined that allows the inclination correction processing.
また、本発明の一態様に係る画像読取方法は、原稿に形成された画像を読み取る画像読取手段と、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像を用いて原稿のサイズを検知する原稿サイズ検知手段とを備える画像読取装置が、前記原稿の画像を読み取るときの画像読取方法であって、前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記原稿のサイズを検知する原稿サイズ検知処理を行えるか否かを判断する判断工程と、前記判断工程において前記原稿サイズ検知処理を行えると判断されると、前記原稿サイズ検知手段によって、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿のサイズを検知する原稿サイズ検知工程と、を含むことを特徴とする。
また、本発明の他の一態様に係る画像読取方法は、原稿に形成された画像を読み取る画像読取手段と、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像中の原稿画像の傾き補正を行う傾き補正手段とを備える画像読取装置が、前記原稿の画像を読み取るときの画像読取方法であって、前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記読取画像中の原稿画像の傾きを補正する傾き補正処理を行えるか否かを判断する判断工程と、前記判断工程において前記傾き補正処理を行えると判断されると、前記傾き補正手段によって、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿画像の傾きを補正する傾き補正工程と、を含むことを特徴とする。
また、本発明の一態様に係る画像読取システムは、原稿の画像を読み取る画像読取装置と、前記画像読取装置に接続されるコンピュータとを備えた画像読取システムであって、前記画像読取装置に設けられて、原稿に形成された画像を読み取る画像読取手段と、前記画像読取装置に設けられて、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、前記画像読取装置から得た原稿の読取画像であって、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像を用いて原稿のサイズを検知する原稿サイズ検知手段と、前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記原稿のサイズを検知する原稿サイズ検知処理を行えるか否かを判断する判断手段とを有し、前記判断手段によって前記原稿サイズ検知処理を行えると判断されると、前記原稿サイズ検知手段は、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿のサイズを検知することを特徴とする。
また、本発明の他の一態様に係る画像読取システムは、原稿の画像を読み取る画像読取装置と、前記画像読取装置に接続されるコンピュータとを備えた画像読取システムであって、前記画像読取装置に設けられて、原稿に形成された画像を読み取る画像読取手段と、前記画像読取装置に設けられて、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像中の原稿画像の傾き補正を行う傾き補正手段と、前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記読取画像中の原稿画像の傾きを補正する傾き補正処理を行えるか否かを判断する判断手段とを備え、前記判断手段によって前記傾き補正処理を行えると判断されると、前記傾き補正手段は、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿画像の傾きを補正することを特徴とする。
In addition, an image reading method according to an aspect of the present invention detects an image reading unit that reads an image formed on a document, and a leading edge and a trailing edge of the document in a sub-scanning direction of reading by the image reading unit. An image reading apparatus comprising: a document front / rear edge detection unit; and a document size detection unit configured to detect a document size using a read image of a document read by the image reading unit based on designation of a reading area. an image reading method when reading an image of a document, and a length in the sub-scanning direction of the read image based on the detection result detected by the document longitudinal end detecting means, for detecting the size of the document A determination step for determining whether or not document size detection processing can be performed, and if it is determined in the determination step that the document size detection processing can be performed, the document size detection processing is performed. It means by, based on the information indicating the position of the boundary between the original image and the background image of the read in image, characterized in that it comprises a and a document size detection process for detecting the size of the document.
An image reading method according to another aspect of the present invention includes an image reading unit that reads an image formed on a document, and a front end and a rear end of the document in a sub-scanning direction of reading by the image reading unit. An image reading apparatus comprising: a document front and rear edge detection unit to detect; and a tilt correction unit that performs tilt correction of a document image in a read image of a document obtained by reading by the image reading unit based on designation of a reading area . an image reading method when reading an image of the document, a length in the sub-scanning direction of the read image based on the detection result detected by the document longitudinal end detecting means, the document of the reading in the image A determination step for determining whether or not tilt correction processing for correcting the tilt of an image can be performed, and if it is determined in the determination step that the tilt correction processing can be performed, the tilt correction means It, on the basis of information indicating the position of the boundary between the original image and the background image of the read in image, characterized in that it comprises a and a tilt correction step of correcting the inclination of the document image.
An image reading system according to an aspect of the present invention is an image reading system including an image reading device that reads an image of a document and a computer connected to the image reading device, and is provided in the image reading device. An image reading unit that reads an image formed on the original, and a front and rear of the original that are provided in the image reading device and detect the leading end and the rear end of the original in the sub-scanning direction of reading by the image reading unit An original detection image obtained from the edge detection unit and the image reading apparatus, and based on the designation of the reading area, the size of the original is detected using the read image of the original read by the image reading unit. Based on the document size detection means, the length of the read image in the sub-scanning direction, and the detection result detected by the document front and rear edge detection means, the document size is detected. Determination means for determining whether or not document size detection processing can be performed, and when the determination means determines that the document size detection processing can be performed, the document size detection means detects the read image. The size of the original is detected based on information indicating the position of the boundary between the original original image and the background image.
An image reading system according to another aspect of the present invention is an image reading system including an image reading device that reads an image of a document and a computer connected to the image reading device. An image reading means for reading an image formed on the original, and an image reading means provided in the image reading device for detecting the leading edge and the trailing edge of the original in the sub-scanning direction of reading by the image reading means. Document front and rear edge detection means, inclination correction means for correcting the inclination of the document image in the read image of the document read by the image reading means based on the designation of the reading area, and the sub-scanning direction of the read image Whether or not tilt correction processing for correcting the tilt of the document image in the read image can be performed based on the length of the document and the detection result detected by the document front and rear edge detection means Determining means for determining whether the inclination correction processing can be performed by the determining means, the inclination correcting means uses information indicating a position of a boundary between the document image and the background image in the read image. Based on this, the inclination of the original image is corrected.
本発明によれば、原稿端の影等を利用した原稿境界位置検知処理において、原稿の端部よりも内側の領域が指定された状態で読取った場合や、原稿長さが読取可能長さと同等以上であった場合等における、原稿境界位置検知処理の誤動作を回避できる。 According to the present invention, in document boundary position detection processing using a shadow or the like of the document edge, when the document is read in a state in which an area inside the document edge is specified, or the document length is equal to the readable length. In this case, it is possible to avoid a malfunction in the document boundary position detection process.
以下、本発明の実施の形態を図面を参照しながら説明する。 Embodiments of the present invention will be described below with reference to the drawings.
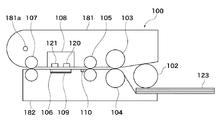
図1は、本発明の実施の形態に係る画像読取装置の構成を示す断面図である。尚、図1に示す画像読取装置の構成は概略的であり、本構成に限るものではない。 FIG. 1 is a cross-sectional view showing a configuration of an image reading apparatus according to an embodiment of the present invention. The configuration of the image reading apparatus shown in FIG. 1 is schematic and is not limited to this configuration.
図1に示すように、画像読取装置100は、上部フレーム181及び下部フレーム182から構成される。上部フレーム181は回動軸181aを中心に回動可能であり、搬送された原稿の紙詰まり等が発生した際に画像読取装置100内に滞留した原稿を取り除くため、手動での上部フレーム181の開閉が可能な構成となっている。
As shown in FIG. 1, the
また、画像読取装置100は、原稿123をピックアップするピックアップローラ102と、ピックアップローラ102によりピックアップされた原稿束123を装置内に給送する給送ローラ103と、ピックアップされた原稿束123を1枚ずつ分離する分離ローラ104と、原稿束123から分離された原稿(シート)の上面の画像情報を読取る読取ユニット108と、読取ユニット108の上流側に配置され原稿を搬送するべく対になって設けられたレジストローラ対105と、読取ユニット108の下流側に配置され原稿を搬送するべく対になって設けられた搬送ローラ対107と、レジストローラ対105の下流側近傍に配置され、搬送される原稿を検知するレジストセンサ110とを備える。
The
上部フレーム181には読取ユニット108(画像読取手段)が固定されている。読取ユニット108は、原稿や後述する対向部材の画像を読取るラインイメージセンサ120と、搬送される原稿等に光を照射する光源121とを備える。下部フレーム182には、読取ユニット108に対向する位置に配置される対向部材109と、対向部材109と読取ユニット108との間に配置される板状のガラス106とが設けられている。対向部材109の色は白色であり、この対向部材を利用してシェーディング補正が行われる。上述のように、対向部材109は白色であるため、前述した従来例とは異なりシェーディング補正に用いる補正データ取得時と画像読み取り時で、読取ユニット108を移動させる動作が必要なく、画像読取機構が単純化されている。
A reading unit 108 (image reading means) is fixed to the
次に、原稿に形成された画像を画像読取装置100が読取るときの動作を説明する。まず、読取ユニット108は、白色の対向部材109をラインイメージセンサ120により読取り、シェーディング補正用の補正データを生成して画素毎に記憶する。
Next, an operation when the
その後、原稿束123をピックアップローラ102と給送ローラ103によって画像読取装置100内に取り込み、分離ローラ104によって1枚ずつに分離する。分離された原稿は、レジストローラ対105及び搬送ローラ対107により挟持されながら副走査方向に搬送されつつ、その上面(表側)に形成されている画像が読取ユニット108によって主走査方向(原稿搬送方向と直交する方向)に沿って読み取られる。また、前述した補正用のデータを参照して、ラインイメージセンサ120の出力信号から生成した画像データをシェーディング補正する。画像が読み取られた後、原稿は搬送ローラ対107によって挟持されながら搬送され、装置外部へ排出される。
Thereafter, the
図2は、図1の画像読取装置100の電気回路の概略構成を示すブロック図である。図2において、120は読み取りユニット108内のラインイメージセンサ、121は光源である。400は、ラインイメージセンサ120の出力信号を、増幅や黒レベルクランプなどのアナログ処理を施した後、デジタルデータに変換するA/D変換部である。
FIG. 2 is a block diagram showing a schematic configuration of an electric circuit of the
401はラインイメージセンサ120や光源121、A/D変換部400などの制御と、ラインイメージセンサ120の出力信号をデジタル化して生成した画像データに各種の画像処理(シェーディング補正等)を行う画像処理部である。
402は、画像データを記憶する画像記憶部となる画像メモリである。403は外部ホスト装置とのインターフェース部であり、信号ケーブル409によりPC等の外部ホスト装置と接続されている。404は本画像読取装置の制御を司る制御部となるCPUである。405はCPU404が動作するために使用する記憶部となるワークメモリである。画像処理部401、CPU404及びワークメモリ405は、バス408を介して接続されている。CPU404は画像処理部401を介して画像メモリ402にアクセスすることができるように構成されている。412は原稿の搬送を行う駆動手段(搬送モータ)であり、CPU404からの指示を受けたモータドライバ407が励磁電流を流すことにより動作する。
図3は、読取ユニット108及びその近傍を示す図であり、図3aは、読取ユニット108を示し、図3bは、読取ユニット108により原稿123の後端が読み取られている状態を示す。
3A and 3B are diagrams showing the
図3a及び図3bにおいて、ラインイメージセンサ120と対向部材109の間には、ガラス106が配置されている。このガラス106は、対向部材109に傷や汚れが付かないようにする役割を果たす。また、原稿123と対向部材109の間にガラス106の厚みと同等若しくはそれ以上の隙間を持たせる役割がある。光源121は、ラインイメージセンサ120の片方の側面に沿って設けられており、上方から光を原稿123に対して片側から斜めに照射することにより、原稿の影124が現れる。このような片側照射は、両側照射の場合と比べると読取画像に影が現れやすくなっている。なお、両側照射とは、ラインイメージセンサに関して対称な位置に配置される一対の光源を設けて、該一対の光源を用いて原稿に光を当てる方式をいう。このとき、ラインイメージセンサ及び一対の光源は、図24のように副走査方向に関して光源、ラインイメージセンサ、光源、の順番で配置される。このように両側照射では図3の影124ができなくなることがわかる。一方、本実施例のように片側照射とし、さらにガラス106を隔てて対向部材を設けたことで、原稿端の影を強調することができ、原稿画像の境界の検出が容易となっている。
In FIGS. 3 a and 3 b, a
次に、読取ユニット108で読取った読取画像中の原稿画像に基づいて原稿画像のサイズや傾き及び原稿画像に外接する長方形を求める処理並びに傾き補正について説明する。 本実施例では、サイズ検出、傾き検出及び原稿画像に外接する長方形の検出は、前述の原稿読取処理で原稿を読み取った後、画像メモリ402に一時記憶された読取画像に対して前述のシェーディング補正処理を行う前に行い、傾き補正はシェーディング補正処理の後に行うこととする。しかし、上記の処理の順序に限定するものではない。
Next, processing for obtaining the size and inclination of the original image and a rectangle circumscribing the original image based on the original image in the read image read by the
まず、本発明で利用される微分情報を取得するための微分情報生成処理について図4を用いて説明する。この微分情報生成処理は画像処理手段401及びCPU404により実行される。
First, a differential information generation process for acquiring differential information used in the present invention will be described with reference to FIG. This differential information generation process is executed by the
図4は、読み取った読取画像の左上端を原点としたxy座標系を示す図である。本実施の形態では、xy座標系における各画素の濃度値(画素値)をf(x,y)とし、濃度値f(x,y)は、明るい程大きい値とする。尚、本実施の形態では、y軸方向が副走査方向である。また、原稿の読取画像を副走査方向に微分を行った値の絶対値を微分情報値としている。また、実際に画像読取装置で読取った画像では、背景部分と原稿部分の境界には影ができるが、図4を用いた説明では、説明を簡単にするため、背景と原稿の境界部分の影を省略する。 FIG. 4 is a diagram showing an xy coordinate system with the upper left corner of the read image being read as the origin. In the present embodiment, the density value (pixel value) of each pixel in the xy coordinate system is set to f (x, y), and the density value f (x, y) is set to a larger value as it becomes brighter. In the present embodiment, the y-axis direction is the sub-scanning direction. The absolute value of the value obtained by differentiating the read image of the document in the sub-scanning direction is used as the differential information value. Further, in the image actually read by the image reading apparatus, a shadow is formed on the boundary between the background portion and the document portion. However, in the description using FIG. Is omitted.
まず、各画素の位置における読取画像の微分情報値Δ(x,y)は、以下の(1)式で表される。尚、この(1)式の微分情報値の求め方は一例である。 First, the differential information value Δ (x, y) of the read image at the position of each pixel is expressed by the following equation (1). Note that the method of obtaining the differential information value of the equation (1) is an example.
Δ(x,y)=abs(f(x,y+m)−f(x,y)) ……(1)
f(x,y) :各座標の画素の濃度値
f(x,y+m):各座標からmライン先の画素の濃度値
(本実施例では、m=1とする)
Δ (x, y) = abs (f (x, y + m) −f (x, y)) (1)
f (x, y): density value of pixel at each coordinate f (x, y + m): density value of pixel m lines ahead from each coordinate (in this embodiment, m = 1)
ここで、図4中に示されている語句は、夫々以下のように定義される。
・Width :画像の幅(例えば(x座標が0から23までの画像の幅)=24)
・Height :画像の長さ(例えば(y座標が0から25までの画像の長さ)=26)
・nライン :注目ライン
・n+mライン:注目ラインからmライン離れた先のライン
Here, the phrases shown in FIG. 4 are defined as follows.
Width: the width of the image (for example, (the width of the image whose x coordinate is from 0 to 23) = 24)
Height: the length of the image (for example, (the length of the image where the y coordinate is 0 to 25) = 26)
・ N line: attention line ・ n + m line: line ahead of m line from attention line
まず、図4の画像の左上端(x,y)=(0,0)から(Width−1,0)までの各画素の濃度値を(1)式に当てはめる処理を行う。(Width−1,0)まで処理が進んだら、次のラインに移動し、左端(x,y)=(0,1)から(Width−1,1)まで処理を行う。同様にラインを移動し続け、上記と同様の処理を(Width−1,Height−1−m)まで行う。これにより、副走査方向に関する各画素の位置における画像の微分情報値が得られる(図5)。また、図5のy=Height−1のラインは、計算できないので空欄となっている。また、本実施の形態ではxを1ずつ増やしながら走査し、1ラインずつずらしているが、xを1以上ずつ増やしながら、数ラインずつずらし、選択された画素の位置で微分情報を取得してもよい。 First, a process of applying the density value of each pixel from the upper left end (x, y) = (0, 0) to (Width-1, 0) of the image in FIG. 4 to the expression (1) is performed. When the process proceeds to (Width-1, 0), the process moves to the next line, and the process is performed from the left end (x, y) = (0, 1) to (Width-1, 1). Similarly, the line is continuously moved, and the same processing as described above is performed up to (Width-1, Height-1-m). Thereby, the differential information value of the image at the position of each pixel in the sub-scanning direction is obtained (FIG. 5). Further, the line of y = Height-1 in FIG. 5 is blank because it cannot be calculated. Further, in this embodiment, scanning is performed while increasing x by 1 and shifted by one line. However, by shifting x by several lines while increasing x by 1 or more, differential information is acquired at the position of the selected pixel. Also good.
次に、微分情報2値化処理について説明する。尚、微分情報2値化処理は画像処理手段401及びCPU404により実行される。
Next, the differential information binarization process will be described. The differential information binarization process is executed by the
この微分情報2値化処理は、前述した微分情報値Δ(x,y)をある閾値sで2値化する。
本実施の形態では、微分情報値が閾値s(=50)を超えた場合1、それ以外を0とする。2値化情報T(x,y)は以下の(2)式で取得する。尚、sを50とするのは一例である。
T(x,y)=1 (Δ(x,y)>s ) ……(2)
0 (Δ(x,y)≦s ) (s=50)
In the differential information binarization process, the differential information value Δ (x, y) described above is binarized with a certain threshold value s.
In this embodiment, 1 is set when the differential information value exceeds the threshold s (= 50), and 0 is set otherwise. The binarized information T (x, y) is acquired by the following equation (2). Note that setting s to 50 is an example.
T (x, y) = 1 (Δ (x, y)> s) (2)
0 (Δ (x, y) ≦ s) (s = 50)
次に、境界座標情報取得手段について図6を用いて説明する。尚、座標情報取得処理は画像処理手段401及びCPU404により実行される。
Next, boundary coordinate information acquisition means will be described with reference to FIG. The coordinate information acquisition process is executed by the
図6は、微分情報2値化処理で取得した2値化情報T(x,y)を示す図である。 FIG. 6 is a diagram illustrating the binarization information T (x, y) acquired by the differential information binarization processing.
図6において、604は2値化情報の全体図であり、601は、各横ラインにおいてT(x,y)=1となる画素のうち1番小さいx座標値を有する画素のx座標値を格納するバッファである。602は、各横ラインにおいてT(x,y)=1となる画素のうち1番大きいx座標値を有する画素のx座標値を格納するバッファである。603は、各縦ラインにおいてT(x,y)=1となる画素のうち1番大きいy座標値を有する画素のy座標値を格納するバッファである。605は、各縦ラインにおいてT(x,y)=1となる画素のうち1番小さいy座標値を有する画素のy座標値を格納するバッファである。各横ラインまたは各縦ラインにT(x,y)=1となる画素が見つからなかった場合は、各バッファに−1を設定する。尚、バッファ601,602の最後の列(y=25に対応する値)には−1が設定される。これは、前記(1)式の計算をHeight−1−mラインまでしか行っていないからである。
In FIG. 6, 604 is an overall view of the binarized information, and 601 is the x coordinate value of the pixel having the smallest x coordinate value among the pixels where T (x, y) = 1 in each horizontal line. The buffer to store.
次に、実際に画像読取装置で原稿を読み取った読取画像の、本実施例に関係ある特性について説明する。これから説明する読取画像においては、その原稿部分と背景部分の境界には影が存在する。 Next, characteristics related to the present embodiment of the read image actually read by the image reading apparatus will be described. In the read image to be described below, there is a shadow at the boundary between the document portion and the background portion.
図7は、ラインイメージセンサ120と、画像読取装置100内に搬送される原稿と、該原稿の読取画像との対応関係を示す図である。
FIG. 7 is a diagram illustrating a correspondence relationship between the
図7において、矢印1109は原稿の搬送方向を示しており、1102は画像読取装置100内に搬送される原稿であり、1104は副走査方向に搬送される原稿1102をラインイメージセンサ120で読取ることにより得られる読取画像であり、1103は読取画像1104において原稿1102に対応する原稿画像であり、1105は読取画像1104における背景画像であり、1106は、原稿画像1103の後端において原稿画像と背景画像との境界に形成される影部である。
In FIG. 7, an
図8は、図7のラインイメージセンサ120で原稿1102を読み取ったときの副走査方向の濃度変化を示すグラフであり、図8aは、ラインイメージセンサ120の読取位置1107で読み取った縦ラインの濃度変化を示し、図8bは、ラインイメージセンサ120の読取位置1108で読み取った縦ラインの濃度変化を示し、図8cは、読取位置1107における濃度変化の微分値を示し、図8dは、読取位置1108における濃度変化の微分値を示す。尚、原稿画像1103の余白の濃度は、背景画像1105の濃度にほぼ等しいものとして例示する。
FIG. 8 is a graph showing the change in density in the sub-scanning direction when the original 1102 is read by the
図8aに示すように、ラインイメージセンサ120の読取位置1107は原稿1102が通過しない場所を読取るため、読取画像の濃度はほぼ一定値(例えば200)となる。一方、図8bに示すように、ラインイメージセンサ120の読取位置1108は原稿1102が通過する位置を読取る。このとき、原稿画像の後端部と背景画像1105との境界に影部1106が形成されるため、読取画像の濃度は影部1106の位置で急激に変化する。濃度が急激に変化する位置では、副走査方向(図8の縦方向)に微分した値の絶対値が大きくなる(図8d)。本実施の形態では、縦方向、すなわち副走査方向の微分を求めることにより、原稿画像と背景画像の境界にできる影部1106、または、原稿先端において、原稿画像と背景画像との境界における濃度変化を検知している。したがって、バッファ601,602,603に格納する値は、原稿画像の境界の位置を示す境界座標値(座標データ)を示すことになる。
As shown in FIG. 8a, since the
ここで、ラインイメージセンサ120及び対向部材109に付着したゴミについて説明する。図22に示すように、ラインイメージセンサ120やラインイメージセンサ120の対向面(例えば、ガラス106の上面)にゴミが付着した場合、原稿画像には縦スジ(黒線)2204が発生する。しかし、本発明の微分処理を実行した場合、ゴミの影響で発生した副走査方向の縦スジに対して微分をとっても、副走査方向には急激な濃度変化がないため、その微分値は、図8cのグラフに示すように低い値となる。そのため、原稿1102の後端の影部1106を検知する処理は、ゴミによる縦スジの発生に影響されない。また、読取位置1108にゴミがついた場合、ゴミによって発生する縦スジのライン上では原稿と背景の位置を微分値から特定できないが、ゴミが付着していない隣接したラインのデータを使用することにより、後述するサイズ検知や傾き検知を行うことが可能である。
Here, dust adhering to the
次に、原稿画像と背景画像の境界座標値をバッファ601〜603に格納する処理を説明する。
Next, processing for storing the boundary coordinate values of the document image and the background image in the
図9は、バッファ601に境界座標値を格納する処理を示すフローチャートである。ここでは、バッファ601用の配列変数をbuff[y]とし、注目画素の座標を(x,y)とする。
FIG. 9 is a flowchart showing processing for storing boundary coordinate values in the
図9において、まず、図6に示す2値化情報の全体図604の左上端Aをスタート地点(x=0,y=0)とし(ステップS91,S91a)、注目画素をx軸と平行な方向にx座標値の小さい画素から順にずらしながら走査を行う。次に、注目画素の2値化情報T(x,y)が1であるか否かを判別し(ステップS92)、注目画素の2値化情報T(x,y)が1でない場合は、xをインクリメントして(x=x+1)(ステップS93)、ステップS95に進む。注目画素の2値化情報T(x,y)が1である場合は、バッファ601に注目画素のx座標値を格納して(buff[y]=x)(ステップS94)、ステップS98に進む。ステップS95では、注目画素が読取画像の右端を越えているか否かを判別する(x≧Width?)。注目画素が右端を越えていない場合はステップS92に戻り、注目画素が右端を越えている場合は、バッファに−1を格納し(buff[y]=−1)(ステップS97)、注目画素を含む横ラインが最終ラインであるか否かを判別する(y≧Height−1?)(ステップS98)。注目画素を含む横ラインが最終ラインでない場合は、次の横ラインへ移動するためにyをインクリメントして(y=y+1)(ステップS99)、ステップS91aに戻り、最終ラインである場合は、本処理を終了する。 In FIG. 9, first, the upper left end A of the entire binarized information diagram 604 shown in FIG. 6 is set as the start point (x = 0, y = 0) (steps S91, S91a), and the target pixel is parallel to the x-axis. Scanning is performed while sequentially shifting the pixels in the direction from the smallest x coordinate value. Next, it is determined whether or not the binarization information T (x, y) of the target pixel is 1 (step S92). If the binarization information T (x, y) of the target pixel is not 1, x is incremented (x = x + 1) (step S93), and the process proceeds to step S95. When the binarization information T (x, y) of the target pixel is 1, the x coordinate value of the target pixel is stored in the buffer 601 (buff [y] = x) (step S94), and the process proceeds to step S98. . In step S95, it is determined whether or not the target pixel exceeds the right end of the read image (x ≧ Width?). If the target pixel does not exceed the right end, the process returns to step S92. If the target pixel exceeds the right end, -1 is stored in the buffer (buff [y] =-1) (step S97). It is determined whether or not the horizontal line to be included is the last line (y ≧ Height−1?) (Step S98). If the horizontal line including the pixel of interest is not the final line, y is incremented to move to the next horizontal line (y = y + 1) (step S99), and the process returns to step S91a. The process ends.
図10は、バッファ602に境界座標値を格納する処理を示すフローチャートである。尚、図10の処理は、図6に示す2値化情報の全体図604の右上端Bを注目画素のスタート地点とし、x軸と平行な方向にx座標値の大きい画素から順に走査を行うこと以外は、図9のデータ格納処理と基本的に同じであるので、その説明を省略する。
FIG. 10 is a flowchart showing processing for storing boundary coordinate values in the
図11は、バッファ603に境界座標値を格納する処理を示すフローチャートである。図11の処理は、図6に示す2値化情報の全体図604の左下端Cを注目画素のスタート地点とし、y軸と平行な方向にy座標値の大きい画素から順に走査を行い、バッファ603用の配列変数(すなわち、buff[y]に相当)をbuff[x]とすること以外は、図9のデー
タ格納処理と基本的に同じであるので、その説明を省略する。上記境界座標値格納処理によれば、原稿画像と背景画像の境界座標値をバッファ601〜603、605に格納し、原稿画像と背景画像の境界座標値を取得することができる。
FIG. 11 is a flowchart showing processing for storing boundary coordinate values in the
図23は、バッファ605に境界座標値を格納する処理を示すフローチャートである。図23の処理は、図6に示す2値化情報の全体図604の左上端Aを注目画素のスタート地点とし、y軸と平行な方向にy座標値の小さい画素から順に走査を行い、バッファ605用の配列変数(すなわち、buff[y]に相当)をbuff[x]とすること以外は、図9のデータ格納処理と基本的に同じであるので、その説明を省略する。 FIG. 23 is a flowchart showing processing for storing boundary coordinate values in the buffer 605. In the processing of FIG. 23, the upper left end A of the binarization information overall diagram 604 shown in FIG. 9 is basically the same as the data storage process of FIG. 9 except that the array variable for 605 (that is, corresponding to buff [y]) is buff [x], and the description thereof is omitted.
上記境界座標値格納処理によれば、原稿画像と背景画像の境界座標値をバッファ601〜603、605に格納し、原稿画像と背景画像の境界座標値を取得することができる。
According to the boundary coordinate value storing process, the boundary coordinate values of the document image and the background image are stored in the
次に原稿前後端検出手段について説明する。原稿前後端検出手段は、図1のレジストセンサ110及びその出力信号の変化を認識して原稿の前後端を検知するCPU404のことである。不図示のハードウエア回路を検知に用いてもよい。CPU404は原稿の先端がこのレジストセンサ110を通過してから原稿の後端が通過するまでの時間を計測する。また、原稿を搬送するスピードはあらかじめ解像度等によって決まっておりメモリ上に記録されている。原稿搬送スピードと原稿がレジストセンサ110を通過し始めてから通過し終わるまでの時間から原稿の長さを取得している。
Next, the document front and rear edge detection means will be described. The document front / rear edge detection means is the
上述したように、本実施の形態によれば、原稿に形成された画像を読取ユニット108で読み取り、読取ユニット108で読み取った読取画像を副走査方向に走査して、読取画像の全画素のうち選択された画素の位置における該読取画像の副走査方向に関する微分情報を取得し(微分情報生成処理)、微分情報から各画素の2値化情報を取得し(微分情報2値化処理)、2値化情報から読取画像中の原稿画像と背景画像との境界座標値を取得するので(座標情報取得処理)、読取ユニット108や対向部材109に付着したゴミにより読取画像に副走査方向に延びる縦スジが発生した場合であっても、原稿画像と背景画像の境界位置を正確に検出することができる。また、ラインイメージセンサ120の対向部材109を白色にすることで、シェーディング補正時と画像読み取り時で、ラインイメージセンサ120を移動させる必要がなくなるので、ラインイメージセンサを移動する移動手段等の構成を省くことができ、読取ユニットの構成を単純化することができる。
As described above, according to the present embodiment, the image formed on the original is read by the
次に、原稿サイズ検知処理について説明する。図12は、原稿サイズ検知処理を説明する図である。原稿サイズ検知処理では、上記の座標情報取得処理によって得られた境界座標値が用いられる。尚、原稿サイズ検知処理は、画像処理手段401及びCPU404により実行される。
Next, the document size detection process will be described. FIG. 12 is a diagram for explaining the document size detection process. In the document size detection process, the boundary coordinate value obtained by the coordinate information acquisition process is used. The document size detection process is executed by the
図12に示すように、原稿サイズ検知処理で検知するサイズとは、読取画像1303のうち、原稿画像の全ての部分を含む最小四角形のサイズである。1301は読取画像1303内の原稿画像であり、1302はサイズ検知結果として得られる最小四角形である。また、境界線1304〜1307は、バッファ601〜603に格納した境界データから夫々導いたものである。具体的には、まず、座標値x1を求めるために、バッファ601を利用する。座標値xlは、バッファ601に格納した境界データの中で1番小さい値に設定される(但し、−1は除く)。同様にして、座標値xrはバッファ602に格納した境界データの中で1番大きい値に設定され、座標値ytは、バッファ603に格納した境界データの中で一番大きい値に設定される。また、ラインイメージセンサが読み始める位置は原稿の先端の位置と同じであるため、座標値ybは常に0に設定される。
As shown in FIG. 12, the size detected by the document size detection process is a minimum rectangular size including all parts of the document image in the
次に、傾き補正処理について、説明する。傾き補正処理は、後述する原稿傾斜角検出処理と外接長方形算出処理と回転処理で構成されている。 Next, the inclination correction process will be described. The inclination correction process includes a document inclination angle detection process, a circumscribed rectangle calculation process, and a rotation process, which will be described later.
まず、原稿傾斜角検出処理を説明する。原稿傾斜角検出処理では、バッファ603に格納された境界座標値が用いられる。尚、この原稿傾斜角検出処理はCPU404により実行される。
First, document inclination angle detection processing will be described. In the document inclination angle detection process, boundary coordinate values stored in the
図13は、バッファ603の境界座標値から得られる線分を示す図である。図13において、x軸方向の区間Aは、濃度変化がなかったために境界座標値が−1に設定されている部分である。区間Bには、配列にy座標が格納されている。バッファ603に格納されている値は、原稿下側の影の位置に相当する。まず、バッファ603の境界座標値から最大値(P2)、左端(P1)及び右端(P3)を求める。次に、線分P1―P2
と線分P2―P3とを分け、線分P1―P2及び線分P2―P3の傾斜角を検出する。
FIG. 13 is a diagram showing line segments obtained from the boundary coordinate values of the
And the line segments P 2 -P 3 are separated, and the inclination angles of the line segments P 1 -P 2 and the line segments P 2 -P 3 are detected.
図14は、線分P1―P2及び線分P2―P3の傾斜角の検出を説明する図であり、図14aは、線分P1―P2を示し、図14bは、線分P2―P3を示す。 FIG. 14 is a diagram for explaining the detection of the inclination angles of the line segments P 1 -P 2 and the line segments P 2 -P 3 , FIG. 14 a shows the line segments P 1 -P 2 , and FIG. The minutes P 2 -P 3 are shown.
図14aに示すように、線分P1―P2に関して、P1からP2に向かって一定間隔a
で配列を進めていき(p1n;nは自然数)、P2を超えるまでy座標の差分値b1〜bnを求め、差分値b1〜bnの合計値sum1(sum1は図示の例では正の値)を算出する。同様に、線分P2―P3に関して、P2からP3に向かって一定間隔aで配列を進めていき(p2m;mは自然数)、P3を超えるまでy座標の差分値c1〜cmを求め、差分値c1〜cmの合計値sum2(sum2は図示の例では負の値)を算出する(図14b)。
As shown in FIG. 14a, with respect to line segment P 1 -P 2 , a constant interval a from P 1 toward P 2
In will promote sequence (p 1n; n is a natural number), calculates the
次に、上記自然数nと自然数mのうち大きい方を採用し(区間C及び区間Dのうち長い方の区間を採用)、以下の(3)式を用いて傾きベクトル(g,h)を求め、この傾きベクトルにより原稿画像の傾斜角を検出する。 Next, the larger one of the natural number n and the natural number m is adopted (the longer one of the sections C and D is adopted), and the gradient vector (g, h) is obtained using the following equation (3). The inclination angle of the document image is detected from the inclination vector.
(g, h)=(a, sum1/n) n≧m ……(3)
(a, sum2/m) n<m
本原稿傾斜角検出処理によれば、バッファ603に格納された境界座標値を用いて読取画像中の原稿画像の傾斜角を検出することができる。
(G, h) = (a, sum1 / n) n ≧ m (3)
(a, sum2 / m) n <m
According to the original document inclination angle detection process, the inclination angle of the original image in the read image can be detected using the boundary coordinate values stored in the
次に、外接長方形算出処理を説明する。この外接長方形算出処理では、前記傾斜角検出処理で得られた傾きベクトル(g,h)と前記境界座標値(バッファ601及びバッファ602に格納された値)とが用いられる。尚、この外接長方形算出処理は画像処理手段401及びCPU404により実行される。
Next, circumscribed rectangle calculation processing will be described. In the circumscribed rectangle calculation process, the inclination vector (g, h) obtained by the inclination angle detection process and the boundary coordinate values (values stored in the
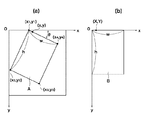
図15は、読取画像1601内の傾いた原稿画像1602を示す図である。図15において、1604及び1605は、バッファ601に格納された境界座標値から得られる境界線である。1606及び1607は、バッファ602に格納された境界座標値から得られる境界線である。1612a,1614aは、n≧mの場合、傾きh/gを有する直線を示し、1613a,1615aは、傾き−g/hを有する直線を示す。1612〜1615は、夫々、1612a〜1615aのうち上記境界線1604〜1607に接する直線である。点1608〜1611は、夫々、直線1612〜1615のうち互いに垂直に交わる2直線の交点を示す。
FIG. 15 is a view showing a tilted
まず、境界線1605に接する傾きh/gの直線1612の方程式を求める方法を説明する。ここではn≧mであって(g, h)=(a, sum1/n)とした場合を例にとって説明する。まず、y=(h/g)x+bを変形して、
b=−(h/g)x+y ……(4)
とする。そして、バッファ601に格納された境界座標値を上記式(4)のx,yに代入し、bを求める。上記(4)式にバッファ601の全ての境界座標値を代入することにより求められるy切片bの中で最も大きい値を選択し、この最大値により境界線1605に接する直線を求める。
First, a method for obtaining an equation of a
b =-(h / g) x + y (4)
And Then, the boundary coordinate values stored in the
同様に、境界線1607に接する直線1614の方程式を求める場合は、
c=−(h/g)x+y ……(5a)
の式にバッファ602の全ての境界座標値を代入することにより求められるy切片cの中で最も小さい値を選択する。
Similarly, when calculating the equation of the
c =-(h / g) x + y (5a)
The smallest value is selected from the y-intercepts c obtained by substituting all the boundary coordinate values of the
境界線1604に接する直線1615の方程式を求める場合は、
e=(g/h)x+y ……(5b)
の式にバッファ601の全ての境界座標値を代入することにより求められるy切片eの中で最も小さい値を選択する。
When calculating the equation of the
e = (g / h) x + y (5b)
The smallest value is selected from the y-intercepts e obtained by substituting all the boundary coordinate values of the
同様に、境界線1606に接する直線1613の方程式を求める場合は、
d=(g/h)x+y ……(5c)
の式にバッファ602の全ての境界座標値を代入することにより求められるy切片dの中で最も大きい値を選択する。
Similarly, when calculating the equation of the
d = (g / h) x + y (5c)
The largest value among the y-intercepts d obtained by substituting all the boundary coordinate values of the
次に、前記手順で求めた4直線1612〜1615の交点1608〜1611の座標を求める。交点1608〜1611の各座標は、互いに垂直に交わる2直線の連立方程式を解くことによって求められる。尚、n<mの場合の算出法は省略する。
Next, the coordinates of the intersection points 1608 to 1611 of the four
本外接長方形算出処理によれば、読取画像中の原稿画像に外接する長方形を検出することができる。 According to the circumscribed rectangle calculation process, a rectangle circumscribing the document image in the read image can be detected.
次に、傾き補正処理で行われる画像の回転処理について説明する。この傾き補正処理では、前記傾斜角検出処理で得られた傾きベクトル(g,h)と前記外接長方形算出処理で検出された原稿の4頂点の交点1608〜1611の座標が用いられる。 Next, an image rotation process performed in the inclination correction process will be described. In this inclination correction process, the coordinates of the intersection points 1608 to 1611 of the four vertices of the document detected by the inclination vector (g, h) obtained by the inclination angle detection process and the circumscribed rectangle calculation process are used.
図16は、傾きベクトル(g,h)の値と原稿の傾き方向の関係を示す図であり、図16aは、hが正の値であり且つg<hの場合を示し、図16bは、hが正の値であり且つg>hの場合を示し、図16cは、hが負の値であり且つg<|h|の場合を示し、図16dは、hが負の値であり且つg>|h|の場合を示す。 FIG. 16 is a diagram showing the relationship between the value of the inclination vector (g, h) and the inclination direction of the document. FIG. 16a shows a case where h is a positive value and g <h, and FIG. FIG. 16c shows the case where h is positive and g> h, FIG. 16c shows the case where h is negative and g <| h |, FIG. 16d shows that h is negative and The case of g> | h | is shown.
図16a〜図16dにおいて、hが正の値であり且つg<hの場合は、回転軸を原稿画像の左上の頂点として、原稿画像を時計回りに角度θだけ回転させ(図16a)、hが正の値であり且つg>hの場合は、原稿画像を反時計回りに角度θだけ回転させる(図16b)。尚、本実施の形態では、g=hの場合は原稿画像を時計周りに回転させることとする。また、hが負の値であり且つg<|h|の場合は、原稿画像を反時計回りに角度θだけ回転させ(図16c)、hが負の値であり且つg>|h|の場合は、時計回りに角度θだけ回転させる(図16d)。g=|h|の場合は原稿画像を時計周りに回転させることとする。通常は読取られる原稿が大きく傾く頻度は少ないため、図16b及び図16dのいずれかの回転を行うことが多い。さらに、回転後の原稿画像の左上の頂点をxy座標系の原点に合わせるように補正する。 16a to 16d, when h is a positive value and g <h, the original image is rotated clockwise by an angle θ with the rotation axis as the upper left vertex of the original image (FIG. 16a), h Is a positive value and g> h, the original image is rotated counterclockwise by an angle θ (FIG. 16b). In this embodiment, when g = h, the document image is rotated clockwise. If h is a negative value and g <| h |, the original image is rotated counterclockwise by an angle θ (FIG. 16c), h is a negative value, and g> | h | In this case, it is rotated clockwise by an angle θ (FIG. 16d). When g = | h |, the document image is rotated clockwise. Normally, since the document to be read does not frequently tilt, the rotation of one of FIGS. 16b and 16d is often performed. Further, correction is performed so that the upper left vertex of the rotated original image is aligned with the origin of the xy coordinate system.
図17は、原稿画像の回転方法を説明する図であり、図17aは、回転前の画像Aを示し、図17bは、回転後の画像Bを示す。 FIGS. 17A and 17B are diagrams for explaining a method for rotating a document image. FIG. 17A shows an image A before rotation, and FIG. 17B shows an image B after rotation.
図17において、画像Bの幅と高さは、以下の(6)式を用いて、前記外接長方形算出処理で算出された原稿の4頂点のうちの3点(x1,y1),(x2,y2),(x4,y4)から次式で求められる。
w=√((x1−x4)2+(y1−y4)2)
……(6)
h=√((x1−x2)2+(y1−y2)2)
In FIG. 17, the width and height of the image B are set to 3 points (x 1 , y 1 ), ( 4 ) of the 4 vertices of the document calculated by the circumscribed rectangle calculation process using the following equation (6). x 2 , y 2 ), (x 4 , y 4 ) is obtained by the following equation.
w = √ ((x 1 −x 4 ) 2 + (y 1 −y 4 ) 2 )
...... (6)
h = √ ((x 1 −x 2 ) 2 + (y 1 −y 2 ) 2 )
次に、画像Bの各画素の濃度値を決定する方法を説明する。画像Bの各画素の濃度値は、以下の(7)式を用いて、画像Aの各画素の濃度値を参照することで決定される。 Next, a method for determining the density value of each pixel of the image B will be described. The density value of each pixel of the image B is determined by referring to the density value of each pixel of the image A using the following equation (7).
x=Xcosθ−Ysinθ+x1 ……(7)
y=Xsinθ+Ycosθ+y1
(x,y):回転前の画素位置
(X,Y):回転後の画素位置
但し、ここでは、角度θは時計回りに測定される角度としている。
x = X cos θ−Y sin θ + x 1 (7)
y = Xsinθ + Ycosθ + y 1
(X, y): pixel position before rotation
(X, Y): Pixel position after rotation However, here, the angle θ is an angle measured clockwise.
図18は、傾き補正処理を示すフローチャートである。尚、この傾き補正処理は画像処理手段401及びCPU404により実行される。
FIG. 18 is a flowchart showing the inclination correction process. This inclination correction process is executed by the
図18において、まず、図17に示す画像Bの左上端から右下端へ向かって各画素毎に順に走査を行い(ステップS181)、上記(7)式を用いて注目画素(X,Y)の回転前
の座標(x,y)を算出する(ステップS182)。次に、回転前の座標(x,y)が画像Aからはみ出ているか否かを判別する(ステップS183)。回転前の座標(x,y)が画像Aからはみ出ていた場合、注目画素(X,Y)の濃度値を白に相当する値とし(ステップS184)、回転前の座標(x,y)が画像Aからはみ出ていない場合は、座標(x,y)の画素濃度値を、注目画素(X,Y)の濃度値にする(ステップS185)。次に、注目画素(X,Y)が画像Bの右下端に位置しているか否かを調べる(ステップS186)。注目画素(X,Y)が画像Bの右下端に位置していない場合はステップS181に戻り、注目画素(X,Y)が画像Bの右下端に位置している場合は、本処理を終了する。本傾き補正処理によれば、回転させた原稿画像の傾きを補正することができる。
18, first, scanning is sequentially performed for each pixel from the upper left end to the lower right end of the image B shown in FIG. 17 (step S181), and the target pixel (X, Y) is calculated using the above equation (7). The coordinates (x, y) before rotation are calculated (step S182). Next, it is determined whether or not the coordinates (x, y) before rotation protrude from the image A (step S183). When the coordinates (x, y) before the rotation are out of the image A, the density value of the target pixel (X, Y) is set to a value corresponding to white (step S184), and the coordinates (x, y) before the rotation are set. If it does not protrude from the image A, the pixel density value at the coordinates (x, y) is set to the density value of the target pixel (X, Y) (step S185). Next, it is checked whether or not the target pixel (X, Y) is positioned at the lower right end of the image B (step S186). If the target pixel (X, Y) is not located at the lower right end of the image B, the process returns to step S181. If the target pixel (X, Y) is located at the lower right end of the image B, this process is terminated. To do. According to the tilt correction process, the tilt of the rotated document image can be corrected.
次にサイズ検知手段によるサイズ検知処理を行うか否かを判断する処理と、原稿の傾きを補正する処理(以下傾き補正処理)を行うか否かの判断処理について説明する。サイズ検知処理、及び、傾き補正処理を行わないことを選択する条件は、読取った原稿画像の長さ(以下原稿画像長とする)が、前記原稿前後端検出手段で取得した実際の原稿長よりも短いときである。このときは、サイズ検知、または、傾き補正処理は行わないようにする。このとき実際には、サイズ検知処理の工程を実行するのであるが、読取画像の幅と高さと同じ値を出力するようになっている。また、このとき傾き補正処理の工程を実行するのであるが、前述した傾斜角検出処理が検出した傾斜角が0度であるとして補正処理の工程を行う。その結果として実際には補正が行われないのと同等になる。なお、サイズ検知処理の工程や傾き補正処理の工程をスキップするようにしてもよい。 Next, a process for determining whether or not to perform a size detection process by the size detection unit and a process for determining whether or not to perform a process for correcting the inclination of the document (hereinafter referred to as an inclination correction process) will be described. The condition for selecting not to perform the size detection process and the inclination correction process is that the length of the read original image (hereinafter referred to as the original image length) is based on the actual original length acquired by the original front and rear edge detection means. Is also a short time. At this time, size detection or tilt correction processing is not performed. At this time, the size detection process is actually performed, but the same value as the width and height of the read image is output. Further, at this time, the inclination correction process is executed, and the correction process is performed assuming that the inclination angle detected by the inclination angle detection process described above is 0 degrees. As a result, it is equivalent to the fact that correction is not actually performed. Note that the size detection process and the inclination correction process may be skipped.
次に原稿画像長が実際の原稿長よりも短いとき、サイズ検知処理、及び、傾き補正処理を行うことが不適当である理由について説明する。 Next, the reason why it is inappropriate to perform the size detection process and the inclination correction process when the document image length is shorter than the actual document length.
図21bは読取画像904の長さが原稿902の長さより短い場合である。図21bは、原稿902の中に黒い直線903が描かれている。図21bの場合、原稿の後端まで読取られていないため原稿の後端の影がわからない。そのため、サイズ検知処理を行うと原稿内にある黒い直線903を原稿の後端と誤認識し、この黒い直線903から境界座標情報を取得してしまうことになり不適当である。読取画像の長さが実際の原稿長よりも短かい場合、境界座標情報取得手段で取得した境界座標情報は、原稿の後端から得られたのか、原稿内の絵から得られたのか区別がつかない。また、原稿内の領域を指定して読み込んだときも原稿と背景の境界がわからない。このときも、原稿画像長が実際の原稿長よりも短い。また、領域を指定しないで読取を行った場合でも、実際の原稿が画像読取装置の読取可能長さよりも長いと、原稿の末端を画像読取装置が読み取れていないため原稿画像長が実際の原稿長よりも短くなる。これらの場合でもサイズ検知処理を行うことは不適当である。
FIG. 21 b shows a case where the length of the read image 904 is shorter than the length of the
図21aは読取画像905の長さが原稿901の長さよりも長い場合である。この場合は、2本の原稿の縁907が原稿画像上に全てあるので、この原稿の縁907を利用すれば、サイズ検知処理、傾き補正処理が行えることがわかる。 FIG. 21 a shows a case where the length of the read image 905 is longer than the length of the original 901. In this case, since the two document edges 907 are all on the document image, it can be understood that the size detection process and the inclination correction process can be performed by using the document edge 907.
本実施の形態では、微分情報生成処理は、濃度の変化点を見つけるために1次微分を行っているが、2次微分を行ってもよい。また、1次微分及び2次微分の両方を行ってもよい。 In the present embodiment, the differential information generation processing performs primary differentiation in order to find the change point of concentration, but may perform secondary differentiation. Moreover, you may perform both a primary differentiation and a secondary differentiation.
本実施の形態では、サイズ検知処理、傾き検出及び原稿に外接する長方形の検出並びに傾き補正処理は、画像処理手段401及びCPU404により実行されるが、信号ケーブル409に接続されたPC等のホスト装置が備える画像処理手段及びCPUにより実行されてもよい。
In the present embodiment, size detection processing, tilt detection, detection of a rectangle circumscribing a document, and tilt correction processing are executed by the
また、原稿に外接する長方形の検出処理において、レジストセンサ110を用いて原稿の先端と後端が通過するタイミングを検出し、読取画像内の原稿画像の先端位置と後端位置を推測し、その情報を利用して原稿画像の先端の一辺と後端の一辺の検出結果を補正してもよい。具体的には、原稿の先端の一辺はレジストセンサ110で検知した原稿先端が通過したタイミングに対応する位置を通る直線となるようにして、原稿の後端の一辺はレジストセンサ110で検知した原稿後端が通過したタイミングに対応する位置を通る直線となるようにする。
Further, in the process of detecting a rectangle circumscribing the document, the
また、本実施の形態では、原稿画像の後端部に影ができ易い照射方向とし、後端部の影を利用して原稿画像の境界を検知したが、これに限るものではなく、照射方向を変えて原稿画像の先端部にできる影を利用して、検知や補正を行うようにしてもよい。 Further, in the present embodiment, the irradiation direction is such that a shadow is easily formed at the rear end portion of the document image, and the boundary of the document image is detected using the shadow at the rear end portion. However, the present invention is not limited to this. Alternatively, detection and correction may be performed using a shadow formed on the leading edge of the original image.
次に、サイズ検知処理及び傾き補正処理を行えなかった場合、画像読取を停止し、ユーザーにエラーとして通知する方法について説明する。画像読取装置の構成、画像読取り処理、サイズ検知処理、及び、傾き補正処理の内容は前述したとおりである。 Next, a method for stopping image reading and notifying the user as an error when the size detection process and the inclination correction process cannot be performed will be described. The configuration of the image reading apparatus, the image reading process, the size detection process, and the content of the inclination correction process are as described above.
図25はサイズ検知処理を行えないと判断した場合、エラーとしてPC上にエラーを表示するまでのフローチャートである。まず、画像読取を開始するための初期化等の処理を行い(ステップS200)、次に原稿があるか確認する(ステップS201)。原稿がなければ読取処理を終了する(ステップS206)。原稿があった場合、画像読取を行い(ステップS202)、原稿の長さが読取画像の長さよりも長く、サイズ検知処理を行えるか判断する(ステップS203)。サイズ検知処理を行えると判断した場合、サイズ検知処理を行い(ステップS204)、画像を保存した後(ステップS205)、ステップS201に戻り処理を継続する。ステップS203でサイズ検知処理を行えないと判断した場合、画像読取を停止して、エラーが検出された原稿の画像を表示するとともにエラーを表示する(ステップS207)。エラー表示の仕方の一例としてここでは、PC上にエラーダイアログを表示して、ユーザーにエラーであることを通知する。その後、ユーザーに画像読取処理を継続するかどうかを選択させる(ステップS208)。選択の手段としては、PC上に、継続しますか?という内容の文字列を表示したYesボタン・Noボタンを備えるダイアログを表示する。ステップS208でYesボタンを押して、継続することを選択した場合、ステップS201に戻り処理を継続する。また、Noボタンを押して処理を中断することを選択した場合、画像読取処理を終了する(ステップS209)。図25のエラー表示のフローチャートは、サイズ検知処理に関する判断を行う場合を例示したものであるが、傾き補正処理に関する判断を行う場合は図25のフローチャートの、サイズ検知処理を行えるか否かの判断を行うステップS203とサイズ検知処理を行うステップS204を、傾き補正処理を行えるか否かの判断及び傾き補正処理を行うステップに置き換えればよい。 FIG. 25 is a flowchart until an error is displayed on the PC as an error when it is determined that the size detection process cannot be performed. First, initialization and other processes for starting image reading are performed (step S200), and then it is confirmed whether there is a document (step S201). If there is no document, the reading process is terminated (step S206). If there is a document, image reading is performed (step S202), and it is determined whether the length of the document is longer than the length of the read image and size detection processing can be performed (step S203). If it is determined that the size detection process can be performed, the size detection process is performed (step S204), the image is stored (step S205), and the process returns to step S201 to continue the process. If it is determined in step S203 that the size detection process cannot be performed, the image reading is stopped, and an image of the document in which an error is detected is displayed and an error is displayed (step S207). Here, as an example of how to display an error, an error dialog is displayed on the PC to notify the user of an error. Thereafter, the user is allowed to select whether or not to continue the image reading process (step S208). Will you continue on your PC as a means of selection? A dialog including a Yes button and a No button that display a character string with the content of is displayed. If the user presses the Yes button in step S208 and chooses to continue, the process returns to step S201 and continues. If it is selected that the process is interrupted by pressing the No button, the image reading process is terminated (step S209). The error display flowchart in FIG. 25 exemplifies a case in which a determination related to the size detection process is performed. However, in a case where a determination regarding the inclination correction process is performed, a determination as to whether or not the size detection process in the flowchart in FIG. 25 can be performed. The step S203 for performing the step S204 and the step S204 for performing the size detection process may be replaced with a step for determining whether the tilt correction process can be performed and a step for performing the tilt correction process.
本実施の形態では、PC上にエラーダイアログを表示するものであるが、PC上にエラーダイアログを表示しないで、ファイルにログとしてエラーを記録してもよい。 In this embodiment, an error dialog is displayed on the PC. However, an error may be recorded as a log in a file without displaying the error dialog on the PC.
また、エラーダイアログを表示するだけではなく、原稿の傾き情報をユーザーに入力させる入力手段を設け、入力された傾き情報を利用して、傾き補正処理を行ってもよい。 In addition to displaying an error dialog, an input unit that allows the user to input document tilt information may be provided, and tilt correction processing may be performed using the input tilt information.
また、本発明の目的は、上述した実施の形態の機能を実現するソフトウェアのプログラムを記憶した記憶媒体を画像処読取装置に供給し、その画像処理装置のコンピュータ(又はCPUやMPU等)が記憶媒体に格納されたプログラムコードを読出して実行することによっても、達成される。 Another object of the present invention is to supply a storage medium storing a software program for realizing the functions of the above-described embodiments to an image processing reading apparatus, and the computer (or CPU, MPU, etc.) of the image processing apparatus stores the storage medium. It is also achieved by reading and executing the program code stored on the medium.
この場合、記憶媒体から読出されたプログラムコード自体が上述した実施の形態の機能を実現することとなり、そのプログラムコード及び該プログラムコードを記憶した記憶媒体は本発明を構成する。 In this case, the program code itself read from the storage medium realizes the functions of the above-described embodiment, and the program code and the storage medium storing the program code constitute the present invention.
また、プログラムコードを供給するための記憶媒体としては、例えば、フロッピー(登録商標)ディスク、ハードディスク、光磁気ディスク、CD−ROM、CD−R、CD−RW、DVD−ROM、DVD−RAM、DVD−RW、DVD+RW等の光ディスク、磁気テープ、不揮発性のメモリカード、ROM等を用いることができる。または、プログラムコードをネットワークを介してダウンロードしてもよい。 Examples of the storage medium for supplying the program code include a floppy (registered trademark) disk, a hard disk, a magneto-optical disk, a CD-ROM, a CD-R, a CD-RW, a DVD-ROM, a DVD-RAM, and a DVD. An optical disc such as RW or DVD + RW, a magnetic tape, a nonvolatile memory card, a ROM, or the like can be used. Alternatively, the program code may be downloaded via a network.
コンピュータから読出されたプログラムコードを実行することにより、上述した実施の形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼動するOS(オペレーティングシステム)等が実際の処理の一部又は全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。 By executing the program code read from the computer, not only the functions of the above-described embodiments are realized, but an OS (operating system) operating on the computer based on an instruction of the program code is actually used. It goes without saying that a case where the function of the above-described embodiment is realized by performing part or all of the processing and the processing is included.
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部又は全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれる。 Further, after the program code read from the storage medium is written to a memory provided in a function expansion board inserted into the computer or a function expansion unit connected to the computer, the function expansion is performed based on the instruction of the program code. This includes a case where the CPU or the like provided in the board or the function expansion unit performs part or all of the actual processing, and the functions of the above-described embodiments are realized by the processing.
100 画像読取装置
106 ガラス
109 対向部材
110 レジストセンサ
120 ラインイメージセンサ
121 光源
123 原稿
124 影
401 画像処理部
402 画像メモリ
403 インターフェース部
404 CPU
405 ワークメモリ
601 エッジ位置格納用バッファ
602 エッジ位置格納用バッファ
603 エッジ位置格納用バッファ
604 原稿後端ライン
605 エッジ位置格納用バッファ
701 画像読取装置
711 読取ユニット
717 対向部材
720 位置検知センサ
723 原稿
901 原稿
902 原稿
903 原稿内の黒い直線
904 原稿画像
905 原稿画像
906 原稿の縁
907 原稿の縁
1102 原稿
1103 画像内の原稿
1104 読取画像
1105 画像内の背景
1106 影
1107 読取位置
1108 読取位置
1109 搬送方向
1602 原稿画像
1612a 外接線分の式
1613a 外接線分の式
1614a 外接線分の式
1615a 外接線分の式
2000 読取領域
2001 黒い線
2002 読取画像内の黒い線
2201 読取画像
2202 原稿画像
2203 背景画像
2204 縦スジ
DESCRIPTION OF
405
Claims (16)
前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、
読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像を用いて原稿のサイズを検知する原稿サイズ検知手段と、
前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記原稿のサイズを検知する原稿サイズ検知処理を行えるか否かを判断する判断手段とを備え、
前記判断手段によって前記原稿サイズ検知処理を行えると判断されると、前記原稿サイズ検知手段は、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿のサイズを検知することを特徴とする画像読取装置。 Image reading means for reading an image formed on a document;
Document front and rear edge detection means for detecting the leading edge and the trailing edge of the document in the sub-scanning direction of reading by the image reading means;
A document size detecting means for detecting the size of the document using a read image of the document read by the image reading means based on the designation of the reading area ;
A length in the sub-scanning direction of the read image, the document on the basis of a detection result detected by the front and rear end detecting means, determining means for determining whether perform a document size detection process for detecting the size of the document And
When the determination unit determines that the document size detection process can be performed, the document size detection unit determines the size of the document based on information indicating the position of the boundary between the document image and the background image in the read image. An image reading apparatus characterized by detecting the above.
前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、
読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像を用いて原稿のサイズを検知する原稿サイズ検知手段と、
前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記原稿のサイズを検知する原稿サイズ検知処理を行えるか否かを判断する判断手段とを備え、
前記判断手段は、前記読取画像の前記副走査方向に沿った長さが、前記原稿前後端検出手段によって検出された前記原稿の先端と後端から求まる前記原稿の長さよりも、短い場合には、前記原稿サイズ検知処理を行えないと判断し、短くない場合には、前記原稿サイズ検知処理を行えると判断することを特徴とする画像読取装置。 Image reading means for reading an image formed on a document;
Document front and rear edge detection means for detecting the leading edge and the trailing edge of the document in the sub-scanning direction of reading by the image reading means;
A document size detecting means for detecting the size of the document using a read image of the document read by the image reading means based on the designation of the reading area ;
A length in the sub-scanning direction of the read image, the document on the basis of a detection result detected by the front and rear end detecting means, determining means for determining whether perform a document size detection process for detecting the size of the document And
In the case where the length of the read image along the sub-scanning direction is shorter than the length of the original obtained from the leading edge and the trailing edge of the original detected by the original front and rear edge detecting means, An image reading apparatus that determines that the document size detection process cannot be performed and determines that the document size detection process can be performed when the document size detection process is not short.
前記微分情報に基づいて前記読取画像中の原稿画像と背景画像との境界の位置を示す境界座標情報を取得する境界座標情報取得手段と
をさらに備え、
前記原稿サイズ検知手段は、前記境界座標情報取得手段で取得した境界座標情報に基づいて、前記原稿のサイズを検知することを特徴とする請求項1又は2に記載の画像読取装置。 Differential information acquisition means for differentiating the pixel value of each pixel included in the read image in the sub-scanning direction to acquire differential information;
Boundary coordinate information acquisition means for acquiring boundary coordinate information indicating the position of the boundary between the document image and the background image in the read image based on the differential information,
The image reading apparatus according to claim 1, wherein the document size detection unit detects the size of the document based on boundary coordinate information acquired by the boundary coordinate information acquisition unit.
前記判断手段は、前記読取画像の前記副走査方向に沿った長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、更に、前記原稿画像の傾き補正処理を行うか否かを判断し、
前記傾き補正手段は、前記判断手段によって前記傾き補正処理を行うと判断されると、前記境界座標情報に基づいて前記原稿画像の傾きを補正する
ことを特徴とする請求項3に記載の画像読取装置。 Further comprising an inclination correction means for correcting the inclination of the document image in the read image based on the boundary coordinate information acquired by the boundary coordinate information acquisition means;
Whether the determination unit further performs an inclination correction process of the document image based on the length of the read image along the sub-scanning direction and the detection result detected by the document front and rear edge detection unit. Judging
The image reading apparatus according to claim 3, wherein the inclination correction unit corrects the inclination of the document image based on the boundary coordinate information when the determination unit determines that the inclination correction process is performed. apparatus.
前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、
読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像中の原稿画像の傾き補正を行う傾き補正手段と、
前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記読取画像中の原稿画像の傾きを補正する傾き補正処理を行えるか否かを判断する判断手段とを備え、
前記判断手段によって前記傾き補正処理を行えると判断されると、前記傾き補正手段は、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿画像の傾きを補正することを特徴とする画像読取装置。 Image reading means for reading an image formed on a document;
Document front and rear edge detection means for detecting the leading edge and the trailing edge of the document in the sub-scanning direction of reading by the image reading means;
A tilt correction unit that performs tilt correction of a document image in a read image of a document obtained by reading by the image reading unit based on a designation of a reading area ;
A length in the sub-scanning direction of the read image, the document on the basis of a detection result detected by the front and rear end detecting means, whether or not perform the inclination correction processing for correcting the inclination of the document image of the read in image A judging means for judging,
When the determination unit determines that the inclination correction process can be performed, the inclination correction unit calculates the inclination of the document image based on information indicating the position of the boundary between the document image and the background image in the read image. An image reading apparatus which performs correction.
前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、
読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像中の原稿画像の傾き補正を行う傾き補正手段と、
前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記読取画像中の原稿画像の傾きを補正する傾き補正処理を行えるか否かを判断する判断手段とを備え、
前記判断手段は、前記読取画像の前記副走査方向に沿った長さが、前記原稿前後端検出手段によって検出された前記原稿の先端と後端から求まる前記原稿の長さよりも、短い場合には、前記傾き補正処理を行えないと判断し、短くない場合には、前記傾き補正処理を行えると判断することを特徴とする画像読取装置。 Image reading means for reading an image formed on a document;
Document front and rear edge detection means for detecting the leading edge and the trailing edge of the document in the sub-scanning direction of reading by the image reading means;
A tilt correction unit that performs tilt correction of a document image in a read image of a document obtained by reading by the image reading unit based on a designation of a reading area ;
A length in the sub-scanning direction of the read image, the document on the basis of a detection result detected by the front and rear end detecting means, whether or not perform the inclination correction processing for correcting the inclination of the document image of the read in image A judging means for judging,
In the case where the length of the read image along the sub-scanning direction is shorter than the length of the original obtained from the leading edge and the trailing edge of the original detected by the original front and rear edge detecting means, An image reading apparatus that determines that the tilt correction processing cannot be performed and determines that the tilt correction processing can be performed if the tilt correction processing is not short.
前記微分情報に基づいて前記読取画像中の原稿画像と背景画像との境界の位置を示す境界座標情報を取得する境界座標情報取得手段と
をさらに備え、
前記傾き補正手段は、前記境界座標情報に基づいて、前記原稿画像の傾きを補正することを特徴とする請求項9又は10に記載の画像読取装置。 Differential information acquisition means for differentiating the pixel value of each pixel included in the read image in the sub-scanning direction to acquire differential information;
Boundary coordinate information acquisition means for acquiring boundary coordinate information indicating the position of the boundary between the document image and the background image in the read image based on the differential information,
The image reading apparatus according to claim 9, wherein the inclination correction unit corrects an inclination of the document image based on the boundary coordinate information.
前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記原稿のサイズを検知する原稿サイズ検知処理を行えるか否かを判断する判断工程と、
前記判断工程において前記原稿サイズ検知処理を行えると判断されると、前記原稿サイズ検知手段によって、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿のサイズを検知する原稿サイズ検知工程と、
を含むことを特徴とする画像読取方法。 Based on an image reading unit that reads an image formed on a document, a document front and rear edge detection unit that detects a leading edge and a trailing edge of the document in a sub-scanning direction of reading by the image reading unit, and a reading area designation An image reading apparatus comprising an original size detecting means for detecting the size of an original using a read image of the original obtained by reading by the image reading means, wherein the image reading method reads an image of the original,
Wherein the length in the sub-scanning direction of the read image, based on a detection result detected by the document longitudinal end detecting means, step determination of determining whether perform a document size detection process for detecting the size of the document When,
When it is determined in the determination step that the document size detection process can be performed, the document size detection unit determines the size of the document based on information indicating the position of the boundary between the document image and the background image in the read image. A document size detection process for detecting
An image reading method comprising:
前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記読取画像中の原稿画像の傾きを補正する傾き補正処理を行えるか否かを判断する判断工程と、
前記判断工程において前記傾き補正処理を行えると判断されると、前記傾き補正手段によって、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿画像の傾きを補正する傾き補正工程と、
を含むことを特徴とする画像読取方法。 Based on an image reading unit that reads an image formed on a document, a document front and rear edge detection unit that detects a leading edge and a trailing edge of the document in a sub-scanning direction of reading by the image reading unit, and a reading area designation An image reading apparatus comprising an inclination correction unit that performs inclination correction of an original image in a read image of an original obtained by reading by the image reading unit, the image reading method when reading an image of the original,
A length in the sub-scanning direction of the read image, the document on the basis of a detection result detected by the front and rear end detecting means, whether or not perform the inclination correction processing for correcting the inclination of the document image of the read in image A judging process for judging;
If it is determined in the determining step that the tilt correction process can be performed, the tilt correction unit determines the tilt of the document image based on information indicating the position of the boundary between the document image and the background image in the read image. An inclination correction process to be corrected;
An image reading method comprising:
前記画像読取装置に設けられて、原稿に形成された画像を読み取る画像読取手段と、
前記画像読取装置に設けられて、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、
前記画像読取装置から得た原稿の読取画像であって、読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像を用いて原稿のサイズを検知する原稿サイズ検知手段と、
前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記原稿のサイズを検知する原稿サイズ検知処理を行えるか否かを判断する判断手段とを有し、
前記判断手段によって前記原稿サイズ検知処理を行えると判断されると、前記原稿サイズ検知手段は、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿のサイズを検知することを特徴とする画像読取システム。 An image reading system comprising an image reading device for reading an image of a document and a computer connected to the image reading device,
An image reading means provided in the image reading device for reading an image formed on a document;
A document front / rear edge detection unit that is provided in the image reading device and detects a leading edge and a trailing edge of the document in a sub-scanning direction of reading by the image reading unit;
A document size detection unit that detects a size of a document using a read image of the document obtained by reading by the image reading unit based on a designation of a reading region, the document being a read image obtained from the image reading device. ,
A length in the sub-scanning direction of the read image, the document on the basis of a detection result detected by the front and rear end detecting means, determining means for determining whether perform a document size detection process for detecting the size of the document And
When the determination unit determines that the document size detection process can be performed, the document size detection unit determines the size of the document based on information indicating the position of the boundary between the document image and the background image in the read image. An image reading system characterized by detecting the above.
前記画像読取装置に設けられて、原稿に形成された画像を読み取る画像読取手段と、
前記画像読取装置に設けられて、前記画像読取手段による読み取りの副走査方向における、前記原稿の先端と後端とを検出する原稿前後端検出手段と、
読取領域の指定に基づいて、前記画像読取手段によって読み取って得た原稿の読取画像中の原稿画像の傾き補正を行う傾き補正手段と、
前記読取画像の前記副走査方向における長さと、前記原稿前後端検出手段によって検出された検出結果とに基づいて、前記読取画像中の原稿画像の傾きを補正する傾き補正処理を行えるか否かを判断する判断手段とを備え、
前記判断手段によって前記傾き補正処理を行えると判断されると、前記傾き補正手段は、前記読取画像中の原稿画像と背景画像との境界の位置を示す情報に基づいて、前記原稿画像の傾きを補正することを特徴とする画像読取システム。 An image reading system comprising an image reading device for reading an image of a document and a computer connected to the image reading device,
An image reading means provided in the image reading device for reading an image formed on a document;
A document front / rear edge detection unit that is provided in the image reading device and detects a leading edge and a trailing edge of the document in a sub-scanning direction of reading by the image reading unit;
A tilt correction unit that performs tilt correction of a document image in a read image of a document obtained by reading by the image reading unit based on a designation of a reading area ;
A length in the sub-scanning direction of the read image, the document on the basis of a detection result detected by the front and rear end detecting means, whether or not perform the inclination correction processing for correcting the inclination of the document image of the read in image A judging means for judging,
When the determination unit determines that the inclination correction process can be performed, the inclination correction unit calculates the inclination of the document image based on information indicating the position of the boundary between the document image and the background image in the read image. An image reading system characterized by correcting.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008173500A JP5313565B2 (en) | 2008-07-02 | 2008-07-02 | Image reading apparatus, image reading method, image reading system, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008173500A JP5313565B2 (en) | 2008-07-02 | 2008-07-02 | Image reading apparatus, image reading method, image reading system, and program |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010016539A JP2010016539A (en) | 2010-01-21 |
| JP2010016539A5 JP2010016539A5 (en) | 2011-08-11 |
| JP5313565B2 true JP5313565B2 (en) | 2013-10-09 |
Family
ID=41702239
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008173500A Active JP5313565B2 (en) | 2008-07-02 | 2008-07-02 | Image reading apparatus, image reading method, image reading system, and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5313565B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5848085B2 (en) * | 2011-09-30 | 2016-01-27 | キヤノン電子株式会社 | Image reading system and document size detection device |
| JP6401209B2 (en) * | 2016-07-29 | 2018-10-03 | 株式会社大一商会 | Game machine |
| JP2021068971A (en) * | 2019-10-21 | 2021-04-30 | 京セラドキュメントソリューションズ株式会社 | Image reading device |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07117895A (en) * | 1993-08-31 | 1995-05-09 | Minolta Co Ltd | Paper conveying device |
| JPH10150530A (en) * | 1996-11-20 | 1998-06-02 | Canon Inc | Facsimile equipment |
| JPH1141416A (en) * | 1997-07-15 | 1999-02-12 | Pfu Ltd | Image reader, control method therefor and record medium |
| JPH11355517A (en) * | 1998-06-12 | 1999-12-24 | Ricoh Co Ltd | Digital image forming device |
| JP2003101741A (en) * | 2001-06-29 | 2003-04-04 | Ricoh Co Ltd | Image processor, method and device for controlling image processing |
| JP4003679B2 (en) * | 2003-03-31 | 2007-11-07 | ブラザー工業株式会社 | Image copying machine |
| JP2007158580A (en) * | 2005-12-02 | 2007-06-21 | Canon Inc | Image communication apparatus |
| JP4137959B2 (en) * | 2006-07-07 | 2008-08-20 | シャープ株式会社 | Sheet conveying apparatus, automatic document conveying / reading apparatus including the same, and copying machine including automatic document conveying / reading apparatus |
| JP4864653B2 (en) * | 2006-11-13 | 2012-02-01 | キヤノン電子株式会社 | Image reading apparatus, image reading method, and program for executing the method |
-
2008
- 2008-07-02 JP JP2008173500A patent/JP5313565B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010016539A (en) | 2010-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4864653B2 (en) | Image reading apparatus, image reading method, and program for executing the method | |
| JP4844247B2 (en) | Image processing apparatus and image processing program | |
| CN102131033B (en) | Image reading apparatus and image reading system | |
| JP7131415B2 (en) | TILT DETECTION DEVICE, READING DEVICE, IMAGE PROCESSING DEVICE, AND TILT DETECTION METHOD | |
| CN111510573B (en) | Tilt detection device, reading device, image processing device, and tilt detection method | |
| US8427714B2 (en) | Image-reading device | |
| JP2020149148A (en) | Image processing apparatus, method for processing image, and image processing program | |
| JP6874450B2 (en) | Image processing equipment, image processing method, and image processing program | |
| JP5848085B2 (en) | Image reading system and document size detection device | |
| JP2010166442A (en) | Image reader and method of correcting wrinkle area thereof, and program | |
| JP5313565B2 (en) | Image reading apparatus, image reading method, image reading system, and program | |
| JP5645519B2 (en) | Image processing method, image processing apparatus, and program | |
| JP5276284B2 (en) | Image reading apparatus, image processing method, and image processing program | |
| JP6330505B2 (en) | Image reading device | |
| JP2010050800A (en) | Image reading device | |
| JP2021114653A (en) | Image processing device and image processing method | |
| JP5683099B2 (en) | Image reading apparatus, image reading apparatus control method, and program | |
| JP2015198327A (en) | Image reading device, image reading method, and computer program | |
| JP2016005187A (en) | Image reading apparatus | |
| JP4933402B2 (en) | Image reading device | |
| US20230386020A1 (en) | Image processing apparatus, method of controlling the same, and storage medium | |
| US11582354B2 (en) | Image reading and control device, and method, for document region extraction based on edge candidate and dirt position | |
| JP2006020084A (en) | Image reader and image forming apparatus | |
| JP5740430B2 (en) | Image reading apparatus, image processing method, image processing program, and image reading system | |
| JP2014011669A (en) | Image reading device, control method therefor, image reading system, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110623 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110623 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20110623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120309 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120928 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121122 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130329 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130510 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130529 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130704 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5313565 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |